Informasi Dokumen
- Sekolah: Universitas
- Mata Pelajaran: Teknik Elektro
- Topik: Perancangan Sistem Telemetri Sensor Kompas Pada Accelerometer Pada Payload Roket
- Tipe: tugas akhir
- Tahun: 2023
- Kota: Jakarta
Ringkasan Dokumen
I. PENDAHULUAN
Bagian ini menjelaskan latar belakang, maksud, dan tujuan dari penelitian mengenai sistem telemetri sensor kompas dan accelerometer pada payload roket. Latar belakang mengungkapkan pentingnya teknologi telemetri dalam pengukuran dan analisis data roket, serta tantangan yang dihadapi dalam pengiriman informasi secara wireless. Tujuan dari penelitian ini adalah untuk merancang sistem yang dapat mengukur percepatan dan arah payload roket secara real-time, serta membangun software ground segment untuk menerima data.
1.1 Latar Belakang
Perkembangan teknologi telemetri dalam kedirgantaraan sangat penting untuk mengukur dan menganalisa data dari payload roket. Sistem telemetri ini memanfaatkan modulasi GFSK untuk memastikan pengiriman data yang andal. Dengan menggunakan modul radio frekuensi, sistem ini mampu mengukur percepatan dan arah gerak payload roket dengan akurasi tinggi, yang sangat penting dalam program luar angkasa.
1.2 Maksud dan Tujuan
Maksud dari penelitian ini adalah untuk mengukur percepatan, kemiringan, dan arah payload roket, serta memanfaatkan komunikasi radio frekuensi. Tujuan utamanya adalah merancang sistem telemetri yang dapat mengukur data secara real-time dan membangun ground segment yang user-friendly menggunakan Visual Basic 6.0.
1.3 Metode Penelitian
Metode penelitian yang digunakan terdiri dari metode literatur untuk mempelajari konsep dasar sensor dan aktuator, serta metode laboratorium untuk melakukan uji coba dan analisa data. Ini bertujuan untuk memastikan bahwa semua aspek teknis sistem telemetri dapat berfungsi dengan baik.
1.4 Batasan Masalah
Batasan masalah dalam penelitian ini mencakup pengukuran data sensor kompas dan accelerometer, penggunaan mikrokontroler BS2SX, serta sistem komunikasi radio yang digunakan. Penelitian ini juga membatasi pengujian terhadap noise dan variasi bentuk payload roket.
1.5 Sistematika Penulisan
Sistematika penulisan dibagi menjadi beberapa bab yang terdiri dari pendahuluan, landasan teori, perancangan sistem, pengujian dan analisa, serta kesimpulan dan saran. Ini bertujuan untuk memberikan struktur yang jelas dalam laporan penelitian.
II. LANDASAN TEORI
Bagian ini membahas teori-teori dasar yang mendasari sistem telemetri, termasuk pengertian sistem telemetri, komunikasi data, dan teknik pengkodean. Teori-teori ini penting untuk memahami bagaimana sistem telemetri berfungsi dan bagaimana data dikirim dan diterima.
2.1 Pengertian Sistem Telemetri
Telemetri adalah teknologi pengukuran jarak jauh yang melaporkan informasi kepada operator. Ini melibatkan pengukuran percepatan dan arah dari payload roket. Telemetri bergerak sangat rentan terhadap noise, yang dapat mempengaruhi akurasi pengukuran.
2.2 Komunikasi Data
Komunikasi data adalah proses pemindahan informasi antara komputer dan perangkat lain dalam bentuk digital. Ini melibatkan transmisi data yang diperlukan untuk menghasilkan informasi yang dapat digunakan oleh pengguna. Model komunikasi data penting untuk memahami cara data dikirim dan diterima.
2.3 Transmisi Analog dan Digital
Transmisi data dibagi menjadi dua jenis: analog dan digital. Sinyal analog berfungsi untuk mentransmisikan informasi secara terus-menerus, sedangkan sinyal digital digunakan untuk mentransmisikan data dalam bentuk biner. Pemahaman tentang kedua jenis transmisi ini penting untuk desain sistem telemetri.
2.4 Sistem Komunikasi Radio
Sistem komunikasi radio menggunakan gelombang elektromagnetik untuk mentransmisikan data. Dalam konteks telemetri, modulasi sinyal diperlukan untuk mengubah data digital menjadi sinyal analog yang dapat ditransmisikan. Teknik modulasi seperti GFSK sangat penting untuk memastikan pengiriman data yang efisien.
2.5 Teknik Pengkodean
Teknik pengkodean adalah proses penting dalam komunikasi data, di mana sinyal diubah menjadi bentuk yang dapat dipahami oleh perangkat tertentu. Ini melibatkan berbagai teknik modulasi untuk memastikan bahwa data dapat ditransmisikan dengan benar dan efisien.
III. PERANCANGAN SISTEM
Bagian ini menjelaskan perancangan sistem telemetri, termasuk pemilihan komponen, desain hardware dan software, serta algoritma yang digunakan untuk mengontrol sistem. Ini menunjukkan bagaimana semua elemen bekerja bersama untuk menciptakan sistem telemetri yang efektif.
3.1 Perancangan Sistem
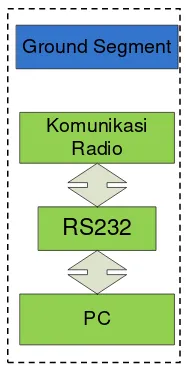
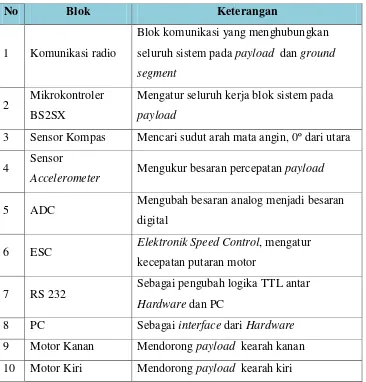
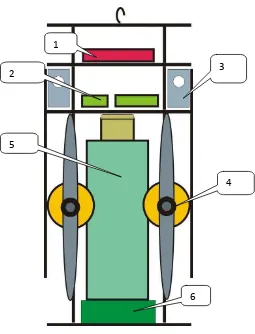
Sistem telemetri dirancang untuk mengukur data dari sensor kompas dan accelerometer pada payload roket. Diagram blok sistem menunjukkan hubungan antara berbagai komponen, termasuk mikrokontroler, sensor, dan modul komunikasi radio, yang bekerja sama untuk mengumpulkan dan mengirim data.
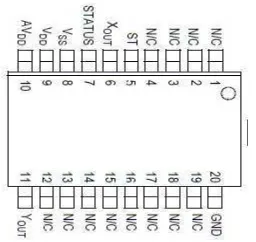
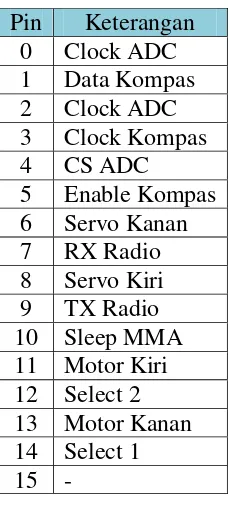
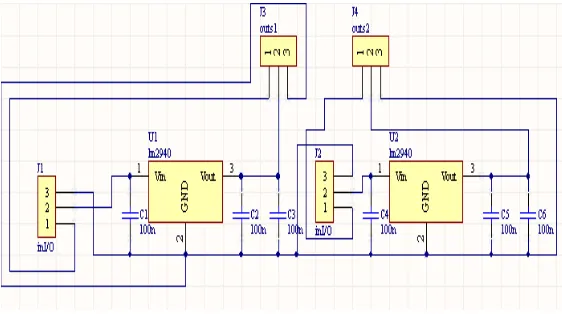
3.2 Perancangan Hardware
Perancangan hardware mencakup pemilihan komponen seperti mikrokontroler BS2SX, sensor, dan modul komunikasi. Rangkaian motherboard dirancang untuk menghubungkan semua sensor dengan mikrokontroler, memastikan bahwa data dapat dikumpulkan dan diproses dengan efisien.
3.3 Perancangan Software
Perancangan software mencakup pengembangan algoritma yang mengontrol sistem telemetri. Algoritma dasar ditulis dalam Basic Stamp Editor dan disimpan dalam mikrokontroler, memungkinkan sistem untuk menjalankan fungsinya secara otomatis. Diagram alir menunjukkan alur kerja sistem secara keseluruhan.
IV. PENGUJIAN DAN ANALISA
Bagian ini berisi hasil pengujian sistem telemetri yang dilakukan di laboratorium dan lapangan. Analisis data dilakukan untuk mengevaluasi kinerja sistem dan mengidentifikasi masalah yang mungkin muncul selama pengoperasian.
4.1 Pengujian Sistem
Pengujian sistem dilakukan untuk memastikan bahwa semua komponen berfungsi dengan baik. Ini melibatkan pengujian sensor, mikrokontroler, dan modul komunikasi untuk memastikan bahwa data dapat dikumpulkan dan dikirim tanpa gangguan.
4.2 Analisa Data
Data yang dikumpulkan dari pengujian dianalisis untuk mengevaluasi kinerja sistem telemetri. Ini termasuk analisis terhadap akurasi pengukuran percepatan dan arah, serta waktu yang dibutuhkan untuk mengirimkan data ke ground segment.
V. KESIMPULAN DAN SARAN
Bagian ini menyimpulkan hasil penelitian dan memberikan saran untuk pengembangan lebih lanjut dari sistem telemetri. Ini mencakup rekomendasi untuk perbaikan sistem dan potensi aplikasi di masa depan.
5.1 Kesimpulan
Kesimpulan dari penelitian ini menunjukkan bahwa sistem telemetri yang dirancang berhasil mengukur percepatan dan arah payload roket dengan akurasi tinggi. Penggunaan modulasi GFSK dalam komunikasi radio terbukti efektif untuk pengiriman data.
5.2 Saran
Saran untuk pengembangan lebih lanjut mencakup peningkatan sistem untuk mengurangi noise, serta eksplorasi teknologi komunikasi yang lebih canggih untuk meningkatkan jangkauan dan akurasi pengukuran.
Referensi Dokumen
- Komunikasi Data ( Ariyus, D., & K.R., R.A. )
- Pemrograman Microsoft Visual Basic 6.0 ( Kurniadi, Adi )
- DC Green Komunikasi Data ( Santosa, Insap )
- Kalibrasi Accelerometer untuk Sistem PengukuranVibrasi Roket ( Wahyu, W dkk. )
- Measuremet Of Vehicle Acceleration Performance Using Three-Axial Accelerometer ( Wahyu, W dkk. )