ANALISA KINEMATIKA DAN DINAMIKA
CONNECTING ROD MOTOR BAKAR SATU
SILINDER HONDA REVO
SKRIPSI
Skripsi Yang Diajukan Untuk Memenuhi Syarat Memperoleh Gelar Sarjana
NIM : 050401032
FAHRUROJI SIREGAR
DEPARTEMEN TEKNIK MESIN
FAKULTAS TEKNIK
ANALISA KINEMATIKA DAN DINAMIKA
CONNECTING ROD MOTOR BAKAR SATU
SILINDER HONDA REVO
Oleh :
NIM : 050401032 FAHRUROJI SIREGAR
Diketahui/ Disyahkan : Disetujui Oleh :
Departemen Teknik Mesin Dosen Pembimbing
Fakultas Teknik USU Ketua,
Dr. –Ing. Ir. Ikhwansyah Isranuri
NIP : 19641224 1992111 001 NIP : 19570412 198503 004
ANALISA KINEMATIKA DAN DINAMIKA
CONNECTING ROD MOTOR BAKAR SATU
SILINDER HONDA REVO
Oleh :
NIM : 050401032 FAHRUROJI SIREGAR
Telah diperiksa dan disetujui dari hasil seminar Tugas Skripsi Periode ke-626 tanggal 17-03-2012
Disetujui oleh : Disetujui Oleh :
Dosen Pembanding I Dosen Pembanding II
Dr. –Ing. Ir. Ikhwansyah Isranuri
NIP : 19641224 1992111 001 NIP : 19540320 198101 1 001
ANALISA KINEMATIKA DAN DINAMIKA
CONNECTING ROD MOTOR BAKAR SATU SILINDER
HONDA REVO
NIM. 050401032 FAHRUROJI SIREGAR
Telah disetujui oleh :
Pembimbing/ Penguji
NIP : 19570412 198503 004 Ir. Tugiman K. MT.
Penguji I, Penguji II,
Ir. Mulfi Hazwi M.sc
NIP : 19491012 1981031 002 NIP : 19540320 1981011 001
Ir. A. Halim Nasution, M.sc.
Diketahui oleh,
Departemen Teknik Mesin Fakultas Teknik USU Ketua,
DEPARTEMEN TEKNIK MESIN AGENDA : /TS/2011 FAKULTAS TEKNIK USU DITERIMA : / /20
MEDAN PARAF :
TUGAS SKRIPSI
NAMA : Fahruroji Siregar
NIM : 05 0401 032
MATA KULIAH : Kinematika dan Dinamika
SPESIFIKASI TUGAS : Lakukanlah simulasi untuk mengamati perubahan nilai-nilai kinematika dan dinamika pada connecting rod motor bakar satu silinder sepeda motor HONDA REVO.
Pembahasan meliputi :
1. Menentukan kecepatan dan percepatan pada connecting rod, dan menentukan percepatan titik berat pada
connecting rod.
2. Menentukan gaya yang bekerja pada pena engkol.
Diberikan tanggal : 28/10/2011 Selesai tanggal : 27/02/2012
KETUA DEPARTEMEN TEKNIK MESIN DOSEN PEMBIMBING
Dr. –Ing. Ir. Ikhwansyah Isranuri
NIP : 19642241992111001 NIP : 19570412198503004
Ir. Tugiman MT.
DEPARTEMEN TEKNIK MESIN FAKULTAS TEKNIK USU
MEDAN
KARTU BIMBINGAN
TUGAS SKRIPSI MAHASISWA
No. : /TS/2011
Sub. Program Studi : Teknik Produksi
Bidang Tugas : Kinematika dan Dinamika
Judul Tugas : Analisa Kinematika dan Dinamika Connecting Rod Pada Honda Revo 4 Tak.
Diberikan Tanggal : 28/10/2012 Selesai Tanggal : 27/2/2012 Dosen Pembimbing : Ir. Tugiman MT. Nama Mhs. : Fahruroji Srg
NIM : 050401032
No. Tanggal Kegiatan Asistensi Paraf Dosen
1. 28/10/2011 Pemberian spesifikasi tugas 2. 2/11/2011 Asistensi BAB I
3. 17/11/2011 Asistensi BAB II dan perbaikan BAB I 4. 28/11/2011 Perbaikan BAB II
5. 6/12/2011 Asistensi BAB III 6. 13/12/2011 Perbaikan BAB III 7. 4/01/2012 Asistensi BAB IV
8. 12/01/2012 Diskusi Hasil dan Simulasi 9 25/01/2012 Asistensi BAB V
10. 9/02/2012 Perbaikan Hasil dan Simulasi 11. 27/02/2012 Siap diseminarkan
Catatan :
1. Kartu ini harus diperlihatkan kepada dosen pembimbing
2. Kartu ini harus dijaga bersih dan rapih 3. Kartu ini harus dikembalikan ke Departemen
Bila kegiatan asistensi telah selesai
Diketahui,
Ketua Departemen Teknik Mesin FT-USU
ABSTRAK
Honda REVO merupakan salah satu motor roda dua yang banyak digunakan di Indonesia. Produk keluaran pabrikan terkenal di Indonesia ini mencapai daya maksimumnya pada putaran 7500 RPM sebesar 8.46 PS, dan mencapai torsi maksimumnya pada putaran 5500 RPM 0.86 kg.f/m pada putaran 5500 RPM. Disebabkan intensitas pemakaian penggunaan sepeda motor sekarang ini yang butuh kecepatan tinggi yang memaksa mesin hingga pada putaran maksimumnya, sehingga dilakukan penelitian pada mekanisme engkol luncur untuk mengamati nilai-nilai kinematika dan dinamika pada motor tersebut, karena perbaikan dan pergantian pada bagian-bagian mekanisme engkol luncur tersebut yang sangat mahal. Hasil dari penelitian ini menunjukkan pada poros engkol mengalami torsi maksimum sebesar 106.8939 N.m. Metode yang digunakan untuk menganalisa mekanisme engkol luncur adalah metode analitik/ Hukum Newton dan MSC. MD ADAMS software.
KATA PENGANTAR
Puji syukur hanya bagi ALLAH SWT,, karena atas karunia dan ridho-Nya
penulis dapat menyelesaikan tugas akhir ini. Shalawat dan salam selalu tercurah
kepada Baginda Rasul Muhammad SAW., beserta keluarga, sahabat, serta
orang-orang yang mengikutinya hingga akhir zaman.
Skripsi ini merupakan salah satu syarat guna memperoleh gelar Sarjana Teknik (ST) Departemen Teknik Mesin Fakultas Teknik Universitas Sumatera Utara. Adapun judul skripsi ini adalah “Analisa Kinematika dan Dinamika Connecting Rod Motor Bakar Satu Silinder Honda Revo”. Penyelesaian skripsi ini tidak lepas dari dukungan dari berbagai pihak, oleh karena itu pada
kesempatan kali ini penulis ingin menyampaikan penghormatan serta ucapan
terima kasih yang sebesarnya kepada :
1. Ayahanda dan Ibunda tercinta atas cinta kasih, dukungan moril, keuangan,
serta seluruh keluarga yang memberikan motivasi kepada penulis sehingga
dapat menyelesaikan skripsi ini.
2. Bapak Ir. Tugiman K. MT., selaku dosen pembimbing skripsi yang telah
banyak memberikan arahan, diskusi, bimbingan, nasihat, serta kesempatan
yang sangat memicu motivasi sehingga menyelesaikan skripsi ini.
3. Bapak Dr.-Ing. Ir. Ikhwansyah Isranuri., selaku ketua Departemen Teknik
4. Bapak Ir. Mulfi Hazwi MT. selaku Penasehat Akademik penulis dari tahun
2005-sekarang, yang telah banyak memberikan nasihat dan motivasi.
5. Seluruh Staff Pengajar Departemen Teknik Mesin Sumatera Utara yang telah
memberikan bekal ilmu kepada penulis sehingga dapat dapat menyelesaikan
skripsi ini dan Pegawai Departemen Teknik Mesin terima kasih atas
kelancaran urusan birokrasi selama ini.
6. Teman mahasiswa Mesin USU, khususnya Andre Wisudha.
7. Anonymous, yang telah berbagi file khususnya ADAMS.
8. De’Brastagi.Com atas premium account FILESONIC.com.
9. Dan seluruh pihat terkait sehingga skripsi ini dapat rampung.
Akhir kata semoga skripsi ini dapat bermanfaat bagi kita semua dan dapat
dilanjutkan oleh rekan-rekan mahasiswa.
Medan, 28 Mei 2012
Daftar Isi
LEMBAR PERSETUJUAN PEMBIMBING i
LEMBAR PERSETUJUAN PEMBANDING ii
LEMBAR PERSETUJUAN PENGUJI iii
SPESIFIKASI TUGAS iv
KARTU BIMBINGAN v
LEMBAR EVALUASI SEMINAR SKRIPSI vi
ABSENSI PEMBANDING BEBAS MAHASISWA viii
ABSTRAK ix
KATA PENGANTAR x
DAFTAR ISI xii
DAFTAR GAMBAR xiii
DAFTAR TABEL xiv
DAFTAR NOTASI xv
BAB I PENDAHULUAN 1
1.1 Latar Belakang 1
1.2 Maksud dan Tujuan 3
1.3 Batasan Masalah 3
1.4 Metode Penulisan 4
1.5 Sistematika Penulisan 4
BAB II TINJAUAN PUSTAKA 5
2.1 Pendahuluan 5
2.3 Persamaan posisi, kecepatan, percepatan torak 7 2.4 Persamaan kecepatan dan percepatan angular connecting rod 10 2.5 Persamaan percepatan pada titik berat connecting rod 14
2.6 Analisa gaya bantalan 17
2.7 Analisa torsi 20
2.8 Gaya tekan pada permukaan piston 20
BAB III METODOLOGI PENELITIAN 23
3.1 Pendahuluan 23
3.2 Studi kasus 24
3.2.1 Spesifikasi motor 24
3.2.2 Dimensi motor bakar satu silinder 26
3.3 Gaya akibat pembakaran 26
3.4 Diagram alir simulasi 27
3.5 Prosedur simulasi 29
3.5.1 Proses pemodelan 29
3.5.2 Menentukan sambungan 31
3.5.3 Menentukan putaran 32
3.5.4 Proses Simulasi 33
BAB IV HASIL SIMULASI DAN DISKUSI 34
4.1 Pendahuluan 34
4.2 Posisi, kecepatan dan percepatan piston 35 4.3 Analisa kecepatan dan percepatan angular connecting rod 37 4.4 Analisa kecepatan dan percepatan titik berat pada
4.5 Gaya-gaya pada bantalan 42
4.6 Torsi pada poros engkol 47
BAB V KESIMPULAN DAN SARAN 5.1 Kesimpulan
5.2 Saran
DAFTAR GAMBAR
Hal
Gambar 2.1 Reciprocating engine 6
Gambar 2.2 Diagram benda bebas mekanisme engkol luncur 7
Gambar 2.3 Geometri mekanisme engkol peluncur 8
Gambar 2.4 Geometri engkol peluncur 9
Gambar 2.5 Posisi titik berat connecting rod pada mekanisme 13
Gambar 2.6 Posisi vektor C 14
Gambar 2.7 Posisi vektor G 15
Gambar 2.8 Diagram benda bebas piston 16
Gambar 2.9 Diagram benda bebas connecting rod 17
Gambar 2.10 Diagram benda bebas poros engkol 19
Gambar 2.11 Diagram benda bebas crankshaft 20
Gambar 2.12 Siklus OTTO 21
Gambar 2.13 Membuka ADAMS/View 23
Gambar 2.14 Proses pemodelan 25
Gambar 2.15 Window pada Adams/ View 25
Gambar 3.1 Kerangka konsep 28
Gambar 3.2 Honda REVO 29
Gambar 3.3 Diagram alir pemodelan ADAMS 32
Gambar 3.4 Tampilan pembuka ADAMS 33
Gambar 3.5 Link poros engkol 34
Gambar 3.7 Poros engkol dan batang hubung 35
Gambar 3.8 Toolbox cylinderADAMS 35
Gambar 3.9 Peluncur 36
Gambar 3.10 Peluncur mekanisme 36
Gambar 3.11 Sambungan pada mekanisme 37
Gambar 3.12 Motion pada mekanisme 38
Gambar 3.13 Toolbox pada simulasi 38
Gambar 4.1 Skema kinematis 37
Gambar 4.2 Grafik kecepatan angular connecting rod 39
Gambar 4.3 Grafik percepatan angular connecting rod 40
Gambar 4.4 Grafik percepatan titik berat connecting rod sb-x 41
Gambar 4.5 Grafik percepatan titik berat connecting rod sb-y 42
Gambar 4.6 Grafik gaya pada pena engkol komponen horizontal 43
Gambar 4.7 Grafik gaya pada pena engkol komponen vertikal 44
Gambar 4.8 Grafik torsi 48
Gambar 4.9 Grafik kecepatan 52
Gambar 4.10 Grafik percepatan 55
Gambar 4.11 Diagram benda bebas piston 57
Gambar 4.12 Diagram benda bebas connecting rod 57
Gambar 4.13 Diagram benda bebas poros engkol 59
Gambar 4.14 Diagram benda bebas crankshaft 60
DAFTAR GAMBAR
Hal
Gambar 2.1 Reciprocating engine 6
Gambar 2.2 Diagram benda bebas mekanisme engkol luncur 7
Gambar 2.3 Geometri mekanisme engkol peluncur 7
Gambar 2.4 Geometri engkol peluncur 9
Gambar 2.5 Posisi vektor C 9
Gambar 2.6 Diagram benda bebas piston 10
Gambar 2.7 Diagram benda bebas connecting rod 11
Gambar 2.8 Diagram benda bebas poros engkol 13
Gambar 2.9 Diagram benda bebas crankshaft 14
Gambar 2.10 Siklus OTTO 16
Gambar 2.11 Membuka ADAMS/ View 18
Gambar 2.12 Diagram alir pemodelan ADAMS 19
Gambar 2.13Tampilan pembuka ADAMS 20
Gambar 3.1 Kerangka konsep 23
Gambar 3.2 Honda REVO 24
Gambar 3.3 Diagram alir pemodelan motor bakar satu silinder 27
Gambar 3.4 Tampilan Pembuka ADAMS View 28
Gambar 3.5 Link poros engkol pada ADAMS View 29
Gambar 3.7 Connecting Rod dan Poros Engkol 30
Gambar 3.8 Toolbox cylinder pada ADAMS View 30
Gambar 3.9 Peluncur 31
Gambar 3.10 Peluncur pada mekanisme 31
Gambar 3.11 Sambungan pada mekanis 32
Gambar 3.12 Motion pada mekanisme 33
Gambar 3.13 Toolbox pada simulasi 33
Gambar 4.1 Skema kinematis poros engkol 35
Gambar 4.2 Grafik kecepatan pada titik C diuraikan sb-x dan sb-y 36
Gambar 4.3 Grafik percepatan pada titik C diuraikan sb-x dan sb-y 37
Gambar 4.4 Grafik percepatan pada titik berat diuraikan sb-x dan sb-y 38
Gambar 4.5 Grafik gaya pada main bearing komponen horizontal 39
Gambar 4.6 Grafik gaya pada main bearing komponen vertikal 40
Gambar 4.7 Grafik torsi 41
Gambar 4.8 Mekanisme engkol luncur 42
Gambar 4.9 Mekanisme engkol luncur 46
Gambar 4.10 Grafik kecepatan 46
Gambar 4.11 Grafik percepatan 48
Gambar 4.12 Diagram benda bebas piston 50
Gambar 4.13 Diagram benda bebas connecting rod 50
Gambar 4.14 Diagram benda bebas poros engkol 52
Gambar 4.15 Diagram benda bebas crankshaft 53
DAFTAR TABEL
Hal
Tabel 2.1 Tampilan pilihan window pada Adams/ View 24
Tabel 2.2 Deskripsi tool 26
Tabel 3.1 Hasil pengukuran 30
Tabel 4.1 Hasil perhitungan kinematis 56
Tabel 4.2 Hasil perhitungan kinematis secaran analitik 62
DAFTAR TABEL
Hal
Tabel 2.1 Tampilan pembuka adams view 24
Tabel 2.2 Deskripsi tool 26
Tabel 3.1 Hasil pengukuran 30
Tabel 4.1 Hasil perhitungan kinematis pada satu titik 56
Tabel 4.2 Hasil perhitungan kinematika dengan metode analitik 62
Daftar Notasi
Simbol Arti Satuan
A Luas Permukaan Piston cm
a
2
Percepatan Piston
p m/s
a
2
Percepatan titik berat connecting rod
komponen horisontal
gcx m/s
a
2
Percepatan titik berat connecting rod
komponen vertikal
gcy m/s
a
2
Percepatan titik berat poros engkol komponen horisontal
gpx m/s
a
2
Percepatan titik berat poros engkol komponen vertikal
gpy m/s
C
2
Perbandingan panjang poros engkol dan
connecting rod
m
D Diameter Piston cm
Fcx Gaya pada pena engkol komponen horisontal N
Fcy Gaya pada pena engkol komponen vertikal N
Fpx Gaya pada pena piston komponen horisontal N
Fpy Gaya pada pena piston komponen vertikal N
Frx Gaya pada main bearing komponen horisontal N Fry Gaya pada main bearing komponen vertikal N
G Gaya gravitasi bumi m/s
I
2
Momen putar pada connecting rod
zz kg.m
L
2
Panjang connecting rod m
mc Berat connecting rod kg
mp Berat piston kg
mpe Berat poros engkol kg
n Putaran poros engkol rad/s
nr Ketetapan (2 untuk motor 4 tak) -
N Putaran mesin RPM
P Daya efektif kW
Peff Tekanan efektif rata-rata kPa
R Panjang poros engkol m
S Panjang antar titik berat connecting rod dan pena piston
T Torsi N.m U Panjang antara titik berat connecting rod dan
pena engkol
m
Vd Volume silinder dm
v
3
Kecepatan piston
p m/s
x Perpindahan piston m
α2 Percepatan sudut poros engkol rad/s
η
2
Sudut putar connecting rod Deg
θ Sudut putar poros engkol deg
ω1 Kecepatan sudut poros engkol rad/s
ABSTRAK
Honda REVO merupakan salah satu motor roda dua yang banyak digunakan di Indonesia. Produk keluaran pabrikan terkenal di Indonesia ini mencapai daya maksimumnya pada putaran 7500 RPM sebesar 8.46 PS, dan mencapai torsi maksimumnya pada putaran 5500 RPM 0.86 kg.f/m pada putaran 5500 RPM. Disebabkan intensitas pemakaian penggunaan sepeda motor sekarang ini yang butuh kecepatan tinggi yang memaksa mesin hingga pada putaran maksimumnya, sehingga dilakukan penelitian pada mekanisme engkol luncur untuk mengamati nilai-nilai kinematika dan dinamika pada motor tersebut, karena perbaikan dan pergantian pada bagian-bagian mekanisme engkol luncur tersebut yang sangat mahal. Hasil dari penelitian ini menunjukkan pada poros engkol mengalami torsi maksimum sebesar 106.8939 N.m. Metode yang digunakan untuk menganalisa mekanisme engkol luncur adalah metode analitik/ Hukum Newton dan MSC. MD ADAMS software.
BAB I
PENDAHULUAN
1.1. Latar Belakang
Perkembangan ilmu pengetahuan dan teknologi yang sangat cepat memberi dampak yang baik serta manfaat yang besar bagi manusia dalam berbagai bidang kehidupan. Hal ini dapat dilihat dengan semakin banyaknya peralatan yang telah diciptakan manusia dengan berbagai model, bentuk serta kemampuan dari segi pemakaian yang relatif lebih unggul dibandingkan dengan peralatan-peralatan konvensional. Keunggulan tersebut tidak lepas dari hasil penelitian dan percobaan oleh para ahli, yang selalu mencari terobosan dan temuan baru untuk menciptakan sesuatu yang baru bermanfaat dan berguna bagi kehidupan manusia.
Salah satu tujuan diciptakannya teknologi adalah untuk mempermudah manusia dalam memenuhi kebutuhan hidup. Hal ini dapat dirasakan dan dibuktikan dengan semakin mudahnya manusia melakukan sesuatu untuk memenuhi kebutuhan hidup. Terlepas dari dampak negatif yang timbul akibat penemuan dan penciptaan teknologi yang baru, science dan teknologi sangat dibutuhkan oleh manusia. Sebagai contoh suatu perusahaan atau lembaga akan sangat kesulitan jika dalam ruang kerja tidak terdapat perangkat komputer untuk menyelesaikan tugas dan pekerjaan kantor maupun perusahaan.
sarana transportasi tersedia, mulai dari darat, udara, dan laut. Kendaraan yang diproduksi massal di negara kita umumnya kendaraan darat, salah satunya sepeda motor. Agar sepeda motor kita memiliki umur yang lebih panjang maka selain komponen sepeda motor dirancang dengan efektif dan efisien, juga tergantung dari material dari komponen tersebut.
Seperti yang dilakukan Mohammad Ranjbarkohan dalam jurnalnya “kinematic and kinetic analysis of the slider-crank mechanism in otto linear four cylinder z24 engine” yang terdapat pada “journal mechanical engineering research, Vol. 3(3), pp. 85-95, March 2011. Jurnal tersebut mendeskripsikan sebuah laporan dari laboratorium MegaMotor bahwa motor Nissan Z24 mengalami kerusakan pada bagian-bagian vital seperti pada poros engkol dan
connecting rod. Metode yang dilakukan adalah dengan menggunakan hokum newton atau metode analitik dan dengan bantuan ADAMS. Seperti pada lampiran 1.
Pada saat proses pembakaran terjadi di dalam silinder, tenaga yang dihasilkan oleh gas pembakaran sangatlah tinggi. Jika piston dan kelengkapannya tidak mampu menahan daya ledak dari proses pembakaran tersebut, dapat dipastikan kalau piston dan connecting rod dapat pecah.
Untuk itu agar tidak terjadi kejadian tersebut maka kita diharuskan mengetahui kekuatan dari connecting rod tersebut dalam meneruskan tenaga dari proses pembakaran menuju poros engkol sehingga dapat mengubah gerak tranlasi menjadi gerak berputar. Jika kita mengetahui kekuatan bahan dari connecting rod
Berbagai metode analisa telah banyak tersedia untuk mengetahui gaya-gaya yang bekerja pada connecting rod atau lebih umumnya mekanisme engkol luncur. Pada mekanisme engkol luncur terdapat analisa kinematis dan dinamis yang bekerja pada mekanisme tersebut.
Pemakaian metode ini juga diterapkan dalam bidang komputer sehingga mempermudah analisa sebagai sebagai alat bantu perhitungannya. Dengan perangkat komputer, khususnya software ADAMS untuk analisa kinematis dan dinamis, desain pendekatan untuk pembuatan suatu produk dapat dikontrol dengan baik sehingga diharapkan kualitas hasil produk akan lebih baik. Pengujian karakteristik secara eksperimental di laboratorium memerlukan biaya yang tidak sedikit. Untuk itu diperlukan bantuan software yang mampu menganalisa karakteristik suatu model. Oleh karena itu peneliti memilih simulasi dengan menggunakan software yang berbasis analisa seperti ADAMS.
1.2. Maksud dan Tujuan
Maksud dari penelitian pada connecting rod ini adalah untuk mengetahui nilai-nilai kinematika dan kinetik.
Tujuan penelitian kaliini adalah ;
1. Menentukan besarnya percepatan pada connecting rod, dan titik berat pada
connecting rod.
1.3. Batasan Masalah
Dalam penelitian atau proses analisa secara kinematis dan dinamis pada mekanisme engkol luncur ini penulis membatasi permasalahan meliputi yaitu gaya gas akibat pembakar dianggap konstan dengan mengambil nilai tekanan efektif rata-rata saat mesin mengalami daya maksimum. Tidak melakukan perhitungan dengan metode elemen hingga, suhu, serta gesekan diabaikan.
1.4. Metode Penulisan
Metode penulisan yang digunakan dalam penulisan tugas sarjana ini adalah : 1. Studi Literatur
Berupa studi kepustakaan dan kajian dari buku-buku yang mendukung dan membantu menyelesaikan tugas sarjana ini.
2. Diskusi
Berupa tanya jawab dengan dosen pembimbing dan teman-teman mahasiswa yang lain mengenai simulasi yang dibahas.
1.5. Sistematika Penulisan
BAB II
TINJAUAN PUSTAKA
2.1. Pendahuluan
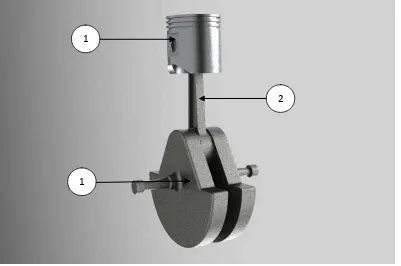
Bab ini memberikan gambaran umum tentang latar belakang pengertian pembangkitan gaya pada mekanisme sebuah mesin bolak-balik (reciprocating engine).
[image:30.595.116.517.370.636.2]
Gambar 2.1 Reciprocating Engine
Dari gambar :
1. Piston 3. Poros engkol
2. Connecting rod
1
2
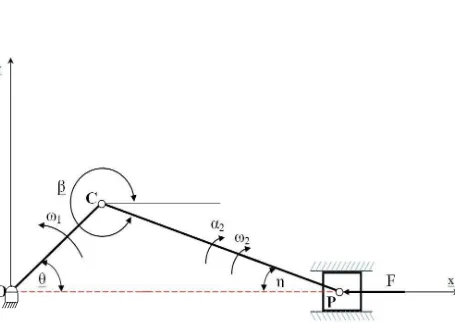
Gambar 2.2 Diagram benda bebas mekanisme engkol luncur
Dari gambar 2.2 menunjukkan diagram benda bebas sebuah mekanisme engkol luncur. Torak P yang mengalami percepatan akan menghasilkan gaya inersia (Fi), Fi merupakan gaya inersia yang bekerja pada pusat torak P, yang
besarnya adalah Fi = mp . ap, dimana mp massa keseluruhan piston dan ap adalah percepatan piston. Sehingga gaya yang menekan piston Fpx jumlah gaya inersia
yang bekerja pada piston dan tekanan gas yang dihasilkan pada pembakaran pada permukaan piston. Gaya ini mengakibatkan poros engkol bergerak dengan
kecepatan konstan ω1. Dan juga mengakibatkan batang penghubung (connecting
rod) bergerak dengan kecepatan angular ω2 dan mengalami percepatan angular
α2.
Motor bakar satu silinder menggunakan mekanisme engkol luncur dalam pengoperasiannya. Untuk aplikasi mekanisme ini pada sebuah motor bakar, usaha hasil pembakaran bahan bakar dan oksigen berekspansi akan mendorong torak yang dilanjutkan ke batang penghubung yang akan memutar poros engkol, yang kemudian diidealisasikan akan menghasilkan putaran konstan dengan bantuan sebuah roda gila (fly wheel).
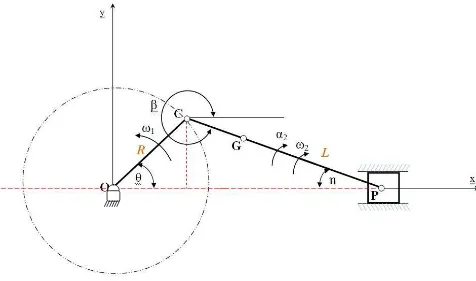
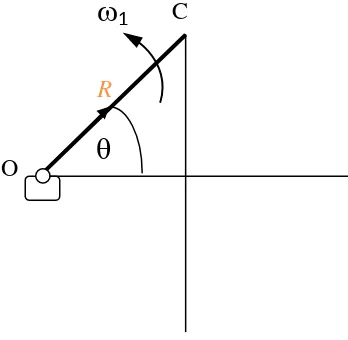
Gambar 2.3 memperlihatkan skema dari mekanisme engkol peluncur horizontal. O adalah kerangka tetap, R adalah radius poros engkol yang bergerak rotasi yang terpusat di O dan L adalah batang penghubung dan P adalah peluncur, yang mana pada kasus ini torak meluncur sepanjang silinder atau bergerak
translasi. θ adalah sudut gerak poros engkol. η adalah sudut perubahan batang
hubung terhadap torak. Dan G adalah titik berat batang hubung.
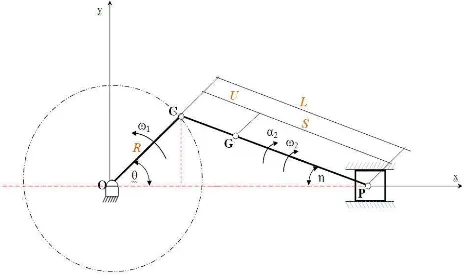
2.3. Persamaan Kecepatan, dan Percepatan Angular Connecting Rod
Gambar 2.4 Geometri engkol peluncur
Perubahan sudut η tiap satuan waktu merupakan kecepatan angular
connecting rod dan tiap perubahan kecepatannya merupakan percepatan angular
connecting rod. Persamaan ini didapat berdasarkan (Theory of Machine, Rs. Khurmi dan J.K. Gupta)
Dengan menggunakan persamaan sinus pada OCP, seperti pada gambar 2.4.
Dimana
X
TMA
L
R
L
Sin η = R Sin θ
Didapatkan kecepatan angular connecting rod ,
(2.1)
Dengan mensubsitusikan persamaan ke persamaan diatas dapat ditulis persamaan
kecepatan angular connecting rod , Dengan menyederhanakan
(2.2)
Turunan pertama kecepatan angular connecting rod PC terhadap waktu adalah percepatan angular PC.
Dengan menurunkannya terhadap waktu, dan memecah persamaan diatas menjadi beberapa, sehingga memudahkan perhitungan.
Karena kecepatan angular poros engkol adalah tetap, maka percepatan angular poros engkol dianggap konstan atau 0
Bagian 2.
Bagian 3.
Bagian 4.
Dengan menjumlahkan tiap bagian, sehingga didapatkan turunan kecepatan angular connecting rod terhadap theta (θ).
Maka persamaan diatas dapat ditulis,
Sehingga,
Dengan menurunkannya terhadap waktu, maka percepatan angular connecting rod
Percepatan angular connecting rod,
(2.3)
2.5. Persamaan Percepatan Titik Berat Pada Connecting Rod
Gambar 2.5 Posisi Titik Berat Connecting Rod Pada Mekanisme Engkol Luncur
Untuk menentukan gaya inersia pada titik G atau pusat gravitasi connecting rod, kita perlu menentukan percepatan absolut pada titik G. Pada sub-bab ini akan ditentukan percepatan G dimana saja berdasarkan perubahan sudut yang dibentuk
connecting rod terhadap poros engkol. Dengan mengacu pada percepatan pada titik C. Dan berdasarkan referensi (vector mechanic dynamic, 9th
(2.4)
Ed. F.Beer).
Dimana, ac adalah percepatan pada titik C, dan rg/c adalah posisi dimana saja
ω
1Gambar 2.6 Posisi vector C
rc
Dengan menurunkan persamaan posisi pada titik C dua kali didapatkan persamaan percepatan pada titik C atau a
merupakan letak atau posisi titik C, atau merupakan sambungan poros engkol dan connecting rod.
(2.5)
c
Untuk mencari persamaan percepatan titik berat pada poros engkol, dan karena jarak titik berat poros engkol adalah R/2, maka percepatan titik berat pada poros engkol adalah.
O
C
θ
(2.6) Untuk menentukan rg/c sepanjang connecting rod CP dapat dilihat pada gambar
2.6 dimana CG adalah u.
Gambar 2.7 Posisi vector G
(2.7)
Kemudian persamaan (2.5) dan persamaan (2.7) disubsitusikan kepersamaan (2.4) didapatkan, persamaan percepatan titik G.
Untuk percepatan horizontal pada titik G,
(2.8)
Dan untuk percepatan vertikal pada titik G,
(2.9)
C
O
G
P
θ
η
2.6. Analisa Gaya Pada Main Bearing
Untuk mengetahui gaya-gaya yang bekerja pada peluncur dapat dilihat pada gambar 2.8.
Gambar 2.8 Diagram benda bebas piston
Pada gambar 2.8 dapat dilihat bahwa FPY merupakan gaya yang terjadi pada titik P untuk komponen vertikal dan FPX merupakan gaya yang terjadi pada titik P untuk komponen horizontal. Karena HONDA REVO menggunakan mesin untuk tipe horizontal, sehingga gaya yang ditimbulkan akibat pembakaran gas Fg dan
gaya inersia yang ditimbulkan mpap
dikategorikan menjadi komponen horisontal. Sehingga,
(2.10)
Sedangkan pada komponen vertikal terdapat berat piston wp dan N gaya yang
bekerja pada dinding silinder.
P Fg mpap Fpy
Fpx
Untuk mengetahui gaya-gaya yang bekerja pada batang hubung atau
connecting rod dapat dilihat pada gambar 2.9.
Gambar 2.9 Diagram benda bebas connecting rod
Dari gambar 2.9 dapat dilihat connecting rod CP, yang mengalami percepatan angular yang arahnya searah sumbur-z menimbulkan momen inersia Izz. Pada
connecting rod CP juga terdapat gaya yang terbagi menjadi komponen vertikal dan horizontal. FCX merupakan gaya pada titik C untuk komponen horizontal,
sedangkan pada komponen horizontal terdapat FPX dan mc.acgx yang merupakan
gaya inersia untuk komponen horizontal pada connecting rod. Sedangkan FCY
yang merupakan gaya pada titik C untuk komponen vertikal. Komponen vertikal pada batang hubung ini adalah WC berat batang hubung dan mc.acgy
gaya inersia untuk komponen vertikal.
(2.11) Fpx Fcx
mc.acgx
mc.acgy
(2.12)
Karena FCY dan FPY
belum diketahui, dengan menggunakan momen pada titik G.
Karena U + S = L, maka
Sehingga dapat diketahui FCY
(2.14)
I
,
zz didapat dari hasil pengukuran dengan menggunakan software SOLIDWORKS.
Gambar 2.10 Diagaram benda bebas poros engkol
Gambar diatas merupakan diagram benda bebas untuk poros engkol, analisa yang dilakukan pada poros engkol dengan mengganggap titik berat poros engkol R/2, dan poros engkol tanpa beban imbang counter weight. Karena poros engkol dianggap berputar pada kecepatan konstan, sehingga percepatan sudut poros engkol dianggap nol.
Fcx
Frx
Fry
Fcy mpe.agpy
mpe.agpx
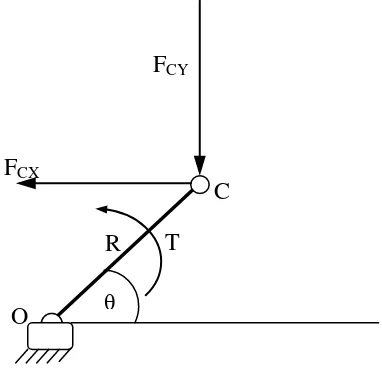
2.7. Analisa Torsi
Analisa torsi kali ini berdasarkan referensi dari jurnal seperti yang terdapat pada lampiran. Dimana torsi yang terjadi pada mekanisme engkol luncur kali ini adalah gaya-gaya komponen horizontal FCX dan vertikal FCY pada titik C
[image:44.595.208.399.310.495.2]dikalikan panjang dari poros engkol itu sendiri.
Gambar 2.11 Diagram benda bebas crankshaft
Sedangkan untuk memperoleh gaya yang ditimbulkan oleh gas dengan menggunakan tekanan efektif rata-rata pada siklus otto.
2.8. Gaya Tekan Pada Permukaan Piston T FCX
FCY
θ
C
O
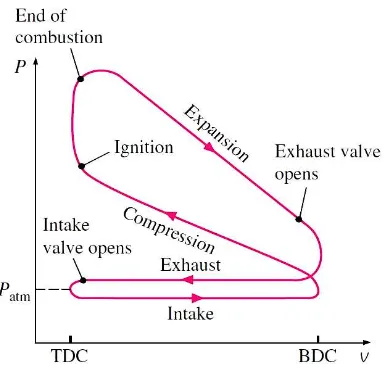
Pada siklus Otto, energy yang dihasilkan berasal dari pembakaran antara campuran bahan bakar. Hasil pembakaran akan menghasilkan tekanan gas yang menekan piston, kemudian diteruskan sampai poros engkol untuk menghasilkan tenaga. Gaya tekan pada siklus Otto bergantung pada tekanan gas yang terjadi akibat ledakan dari pembakaran bahan bakar. Karena selama siklus Otto tekanan dan temperatur selalu berubah-ubah tiap perubahan sudut gerak poros engkol maka sebaiknya dicari harga tekanan konstan yaitu tekanan efektif rata-rata.
Gambar 2.12 Siklus OTTO (sumber : Thermodynamic 6th
Untuk menghitung tekanan gas rata-rata yang terjadi pada siklus Otto dapat dihitung dengan menggunakan rumus (Internal Combustion Engine
Fundamentals, Heywood John-B)
Dimana,
P = Daya efektif (kW)
Peff = mean efektif pressure (kPa)
Vd = Volume silinder (dm3)
N = Putaran poros engkol (R.P.S)
nR
(2.16)
Dimana,
A = Luas permukaan kepala piston = (π/4).D
= 2 (Motor 4 tak)
Dan secara matematis gaya yang ditimbulkan hasil pembakaran pada permukaan torak adalah,
(2.15)
2
D = Diameter piston (cm)
2.9 Md ADAM
Berdasarkan Md Adams Help, Md adams adalah software MSC berbasis
Md adams software yang dapat meningkatkan efisiensi teknik dan dapat mengurangi biaya pengembangan produk dengan melakukan validasi lebih awal. Insinyur dapat mengevaluasi dan mengelola interaksi tiap disiplin ilmu seperti gerakan, aktuasi, dan pengendalian agar produk bekerja lebih optimal seperti kinerja, keamanan, dan kenyamanan. Seiring dengan kemampuan analisis yang luas
Produk-produk yang terdapat pada MD Adams 2010 diantaranya :
• Adams/ Car
• Adams/ Chassis
• Adams/ Driveline
• Adams/ Flex
• Adams/ Insight
• Adams/ PostProcessor
• Adams/ View
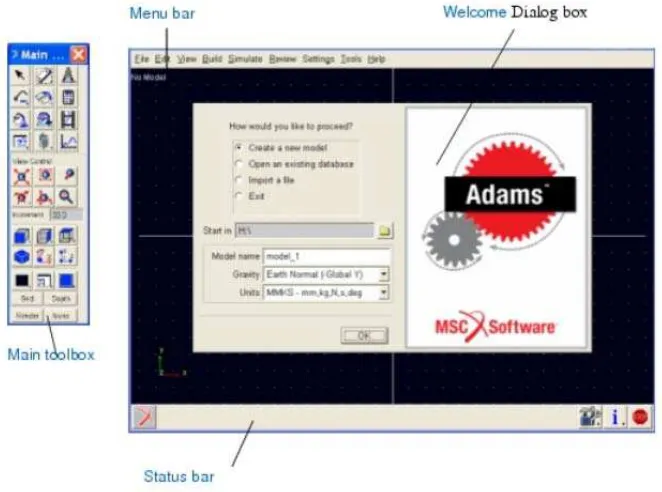
Pada analisa kinematika dan dinamika mekanisme engkol luncur akan menggunakan salah satu produk adams yaitu Adams/ View. Adams/ View adalah produk Adams yang sangat powerful dalam bentuk pemodelan dan simulasi. Pengguna Adams dapat membangun dan mensimulasikan sebuah model yang memiliki part yang bergerak.
Berikut penggunaan Adams/ View :
Gambar 2.13 Membuka ADAMS/ View
Membuat Model
Saat memulai adams/ View, adams/ View akan menampilkan window berupa
welcome dialogue box yang memberi pilihan pada pengguna apakah membuat sebuah model yang baru atau membuka model yang telah ada.
1. Memilih salah satu pilihan yang terdapat pada window seperti pada tabel berikut :
Tabel : Tampilan pilihan pada window ADAMS/ VIEW
Pilihan Pada Tabel Fungsi
Create a New Model Membuat sebuah model yang baru
Open an Existing Database Membuka model yang telah ada
Import File Membuka model dari database adams yang telah ada.
Exit Keluar dari adams/ View
2. Jika memilih membuat model yang baru, terdapat pilihan penggunaan gravitasi pada model,
• Earth Normal : Gravitasi normal sebesar 1 G
• No Gravity : Tidak menggunakan gravitasi
• Other
3. Menyeleksi satuan yang akan digunakan.
• MMKS : millimeter, kilogram, secon
• MKS : meter, kilogram, second
• CGS : centimeter, gram, dyne
• IGS : inci, slug, pound gaya
Tahap-tahap pada pengerjan adams/ View adalah :
Gambar 2.14 Proses pemodelan
Tahap pertama yang dilakukan adalah membangun model, melakukan percobaan pada model, peninjauan pada model, dan dilakukan pengembangan terhadap model jika diperlukan.
Adams/ View
Berikut tampilan adams/ View pada jendela utama.
Gambar 2.15 Window pada ADAM/ View
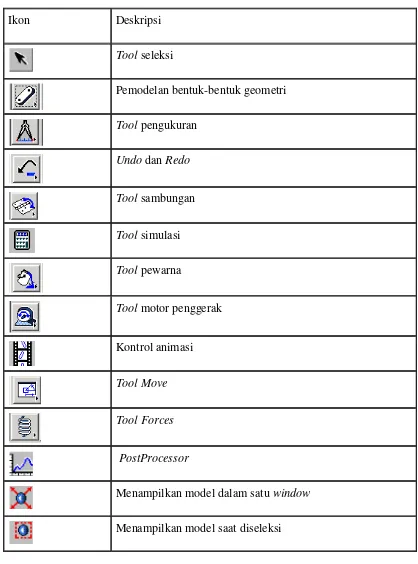
Tool Box Adams/ View
Tabel : Deskripsi Tool
Ikon Deskripsi
Tool seleksi
Pemodelan bentuk-bentuk geometri
pengukuran
Undo dan Redo
Tool sambungan
simulasi
Tool pewarna
motor penggerak
animasi
Tool Forces
Menampilkan model dalam satu window
Menampilkan model pada titik pusat model
Merotasi model
Se
Increment Entering a value lets you more precisely control the view display changes, such as zooming and rotations.
Se
Se
Grid Se
Depth Se
Render Se
BAB III
METODOLOGI PENELITIAN
3.1 Pendahuluan
Bab ini berisikan metodologi yang digunakan untuk menyelesaikan permasalahan skripsi ini. Secara umum metodologi yang digunakan dalam skripsi adalah pemodelan dengan menggunakan MSC ADAMS dan melakukan perbandingan analisa secara manual dan simulasi yang dihasilkan oleh MSC ADAMS.
Gambar 3.1 Kerangka konsep
pada tabel 3.1. Kemudian dilakukan perbandingan hasil secara manual dan simulasi dengan MSC ADAMS.
3.2 Studi Kasus
3.2.1 Spesifikasi Motor
Sebagai studi kasus dalam skripsi ini dipilih motor bakar jenis bensin yang biasa diaplikasikan pada sepeda motor. Adapun spesifikasi mesin yang digunakan dalam skripsi ini merupakan mesin dari sepeda motor Honda Revo yang merupakan keluaran pabrikan terkemuka di Indonesia.
Spesifikasi mesin Honda Revo dapat dilihat pada sebagai berikut :
• Panjang X lebar X tinggi : 1.919 x 709 x 1.080 mm
• Jarak Sumbu Roda : 1.227 mm
• Jarak terendah ke tanah : 135 mm
• Berat kosong : 97 kg
• Tipe rangka : Tulang punggung
• Tipe suspensi depan : Teleskopik
• Tipe suspensi belakang : Lengan ayun dengan peredam kejut ganda
• Ukuran ban depan : 70/90 - 17 M/C 38P
• Ukuran ban belakang : 80/90 - 17 M/C 44P
• Rem depan : Cakram hidrolik, dengan piston tunggal
• Rem belakang : Tromol
• Kapasitas tangki bahan bakar : 3,7 lt
• Tipe mesin : 4 langkah, SOHC, pendinginan udara
• Diameter x langkah : 50 x 55,6 mm
• Volume langkah : 109,1 cc
• Perbandingan Kompresi : 9,0 :1
• Daya Maksimum : 8,46 PS/7.500 rpm
• Torsi Maksimum : 0,86 kgf.m/5.500 rpm
• Kapasitas Minyak Pelumas Mesin : 0,8 lt pada pergantian periodik
• Kopling Otomatis : Ganda, otomatis, sentrifugal, tipe basah
• Gigi Transmsi : 4 kecepatan bertautan tetap
• Pola Pengoperan Gigi : N - 1 - 2 - 3 - 4 - N
• Starter : Pedal dan Elektrik
• Aki : MF 12 V - 3 Ah
• Busi : ND U20EPR9S, NGK CPR6EA-9S
• Sistem Pengapian : DC-CDI, Battery
HARGA : Rp 11,400,000
Sumber : CV. Indako Trading Co.
3.2.2 Dimensi Motor Bakar Satu Silinder
Data dimensi ini akan digunakan untuk proses pemodelan dengan menggunakan ADAMS. Hasil pengukuran ditabulasikan pada tabel 3.1.
Tabel 3.1 Hasil Pengukuran
Piston • Diameter : 40.95 mm
• Berat : 86.50 gr
Connecting rod • Panjang : 94.53 mm • Berat : 144.17 gr
Poros engkol • Panjang : 26.50 mm
3.3 Gaya akibat pembakaran
Pembebanan diawali dengan mencari nilai gaya tekan yang terkonsentrasi di piston. Besarnya gaya F dapat dihitung dengan menggunakan rumus tekanan efektif rata-rata seperti pada bab 2 sebelumnya.
Dimana,
P = 8.46 PS = 6.22 (kW)
Vd = 109.1 cm3 =109.1 x 10-3 (dm3
N = 7500 R.P.M = 450000 (R.P.S) )
nR
Mep = 0.25338 (kPa) = 2 (Motor 4 tak)
Dan secara matematis gaya yang ditimbulkan hasil pembakaran pada permukaan torak adalah,
(2.25)
Dimana,
D = Diameter piston (cm)
A = Luas permukaan kepala piston = (π/4).D
=(π/4).(4.095)
2
=13.17 cm
2
F = 0.25338 (kPa) . 13.17 cm
= 33.38 kN
2
= 3338 N
3.4 Diagram Alir Simulasi
Dalam skiripsi ini, aliran proses simulasi menggunakan proses komputer meliputi, yaitu proses pemodelan untuk membuat suatu pendekatan sistem motor bakar satu silinder akan dilakukan dengan menggunakan bantuan software MSC MD Adams.
3.5 Prosedur Simulasi
3.5.1 Proses Pemodelan
MSC MD ADAMS merupakan salah satu software keluaran MSC seperti
NASTRAN, MD NASTRAN, PATRAN, dll. Hanya saja software MSC MD ADAMS ini dikhususkan untuk mensimulasikan perhitungan kinematis dan dinamis pada suatu sistem.
Pada pemodelan sistem motor bakar menggunakan ADAMS ini menggunakan pendekatan. Yaitu bentuk komponen hanya berupa link-link dan silinder. Berikut tahap-tahap pemodelan, pemberian hubungan atau joint, dan motion pada poros engkol
Memulai MSC MD ADAMS ,
[image:57.595.123.512.441.686.2]Start\Program Files\MSC.Software\MD_Adams\2010\View
1. Pemodelan poros engkol dan batang hubung
Pemodelan dilakukan dengan fitur toolbox dari ADAMS, yaitu link seperti pada gambar 3.4. Pada link yang pertama kali dibuat adalah poros engkol. Panjang poros engkol sepanjang 2.54 cm yang disesuaikan dengan panjang poros engkol HONDA SUPRA. Sedangkan tebal dan lebarnya dibuat sesebasa 1 cm.
Gambar 3.5 Link poros engkol pada ADAMS VIEW
Gambar 3.6 Connecting rod dan poros engkol
2. Proses pemodelan peluncur
Pemodelan dilakukan dengan toolbox yaitu cylinder. Toolbox cylinder dapat dilihat seperti pada gambar 3.7. Pada silinder ini ditentukan diameter silinder sebesar 4.9 cm, dan tinggi silinder sebesar 4 cm. Gambarnya seperti gambar 3.8.
[image:59.595.237.399.465.563.2]Gambar 3.8 Peluncur
Gambar 3.9 Peluncur
3.5.2 Menentukan sambungan
1. Revolute Joint
a. Ground dan poros engkol b. Poros engkol dan connecting rod
c. Connecting rod dan Peluncur 2. Translational Join
a. Peluncur dan ground
[image:61.595.173.555.283.535.2]Keseluruhannya seperti pada gambar 3.10.
Gambar 3.10 Sambungan pada mekanisme
3.5.3 Menentukan putaran
Pada ADAMS VIEW menentukan besarnya putaran menggunakan tool Rotational Joint Motion. Putaran ini diletakkan pada sambungan antara ground
dan poros engkol. Besarnya putaran yaitu 45040.95 deg/s atau setara 7500 rpm seperti yang terlihat pada gambar 3.11.
Revolute Joint
Gambar 3.11 Motion pada mekanisme
3.5.4 Proses simulasi
Proses simulasi dilakukan dengan toolbox interactive simulation control. Gambarnya seperti pada gambar 3.12.
Gambar 3.12 Toolbox simulasi
Tombol untuk menjalankan simulasi, tombol agar simulasi berhenti, dan tombol untuk mereset simulasi
3.6 Menampilkan Hasil Simulasi
Untuk menampilkan hasil simulasi, menggunakan tool Postprocessing, tool
ini menampilkan nilai-nilai kinematika, seperti perpindahan, kecepatan, dan percepatan peluncur.
BAB IV
HASIL SIMULASI DAN DISKUSI
4.1. Pendahuluan
Pada bab ini akan dibahas hasil simulasi pada mekanisme motor bakar satu silinder dengan menggunakan software MSC MD ADAMS dan hasil analisa secara analitik seperti yang dihasilkan pada bab 2 dengan menggunakan metode
[image:64.595.107.510.441.734.2]spreadsheet. Hasil simulasi ini, baik secara manual dan animasi menggunakan putaran yang konstan. Analisa kinematis pada simulasi ini mencakup perhitungan kecepatan, dan percepatan connecting rod (batang hubung), dan analisa dinamis berupa gaya-gaya yang bereaksi pada sambungan big end dan Torsi.
Gambar 4.1 Geometri engkol peluncur
X
TMA
L
R
L
Sin η = R Sin θ
Hasil perhitungan pada gaya-gaya yang bereaksi pada sambungan akan ditampilkan dalam bentuk spreadsheet sehingga dapat dilihat perbedaan hasil simulasi dan perhitungan secara manual.
4.2 Analisa kecepatan dan percepatan angular connecting rod
Pada gambar 4.2 merupakan gambar grafik kecepatan angular connecting rod
[image:66.595.80.518.270.694.2]atau batang penghubung simulasi hasil ADAMS dan perhitungan secara analitik. Grafik kecepatan angular connecting rod saat poros engkol berputar 7500 RPM. Grafik dibawah grafik kecepatan angular connecting rod versus sudut putar poros engkol 0, 15, 30, 45, . . . ., 720, atau setara dengan waktu yang dibutuhkan motor menyelesaikan siklusnya.
Gambar 4.2 Grafik kecepatan angular connecting rod -250 -200 -150 -100 -50 0 50 100 150 200 250
0 90 180 270 360 450 540 630 720
K e ce p a ta n A n g u la r C o n n e ct in g R o d , ra d /s
Sudut Putar Poros Engkol, Deg
ADAMS
Pada gambar 4.3 merupakan gambar grafik percepatan angular connecting rod
[image:67.595.88.547.238.687.2]atau batang penghubung simulasi hasil ADAMS dan perhitungan analitik. Grafik percepatan angular connecting rod saat poros engkol berputar 7500 RPM. Grafik dibawah grafik percepatan angular connecting rod versus sudut putar poros engkol 0, 15, 30, 45, . . . ., 720, atau setara dengan waktu yang dibutuhkan motor menyelesaikan siklusnya.
Gambar 4.3 Grafik percepatan angular connecting rod -200000 -150000 -100000 -50000 0 50000 100000 150000 200000
0 90 180 270 360 450 540 630 720
P e rc e p a ta n A n g u la r C o n n e ct in g R o d , R a d /s 2
Sudut Putar Poros Engkol, Deg
ADAMS
4.3 Hasil analisa percepatan titik berat connecting rod
Pada gambar 4.4 dan 4.5 merupakan gambar grafik percepatan titik berat
[image:68.595.108.546.267.671.2]connecting rod atau batang penghubung simulasi hasil ADAMS dan perhitungan secara analitik. Grafik percepatan connecting rod saat poros engkol berputar 7500 RPM. Grafik dibawah grafik kecepatan connecting rod versus sudut putar poros engkol 0, 15, 30, 45, . . . ., 720, atau setara dengan waktu yang dibutuhkan motor menyelesaikan siklusnya.
Gambar 4.4 Grafik percepatan titik berat sumbu-X connecting rod -20000 -15000 -10000 -5000 0 5000 10000 15000 20000
0 90 180 270 360 450 540 630 720
P e rc e p a ta n T it ik B e ra t C o n n e ct in g R o d S u mb b u -X , m /s 2
Sudut Putar Poros Engkol, Deg
ADAMS
Gambar 4.5 Grafik percepatan angular titik berat sumbu-Y connecting rod -15000 -10000 -5000 0 5000 10000 15000
0 90 180 270 360 450 540 630 720
P e rc e p a ta n T it ik B e ra t C o n n e ct in g R o d S u mb u -Y , m /s 2
Sudut Putar Poros Engkol, Deg
ADAMS
4.5 Hasil Analisa Gaya pada bearing pen
Pada gambar 4.6 dibawah merupakan grafik gaya yang bekerja pada big end, atau
[image:70.595.102.557.180.589.2]crank pin, (Fcx). Pada grafik menggunakan gaya gas ruang bakar konstan sebesar 3300 N yang dihasilkan pada putaran poros engkol 7500 RPM.
Gambar 4.6 Grafik gaya Resultan Fcx pada big end pada putaran 7500 rpm
dengan tekanan gas bakar konstan. -1000 0 1000 2000 3000 4000 5000 6000 7000
0 90 180 270 360 450 540 630 720
G a y a P a d a C ra n k P in S u mb u -X, N ew to n
Sudut Putar Poros Engkol, Deg
ADAMS
Pada gambar 4.7 dibawah merupakan grafik gaya yang bekerja pada big end, atau
[image:71.595.104.550.151.599.2]crank pin, (Fcy). Pada grafik menggunakan gaya gas ruang bakar konstan sebesar 3300 N yang dihasilkan pada putaran poros engkol 7500 RPM.
Gambar 4.7 Grafik gaya Fcy pada big end pada putaran 7500 rpm
dengan tekanan gas bakar konstan. -2500 -2000 -1500 -1000 -500 0 500 1000 1500 2000 2500
0 90 180 270 360 450 540 630 720
G a y a P a d a C ra n k P in S u mb u -Y , N ew to n
Sudut putar poros engkol, deg
ADAMS
4.6 Torsi pada poros engkol
[image:72.595.102.541.191.666.2]Pada gambar 4.8 di bawah merupakan grafik torsi pada poros engkol. Torsi berasal dari gaya yang bekerja pada FCX dan FCY. Torsi terjadi diasumsikan gaya gas konstan sebesar 3300 N dan terjadi pada putaran poros engkol konstan sebesar 7500 RPM.
Gambar 4.8 Grafik Torsi pada putaran 7500 rpm
dengan tekanan gas bakar konstan. -150
-100 -50 0 50 100 150
0 90 180 270 360 450 540 630 720
ADAMS
Dengan membandingkan hasil perhitungan kinematika secara analitik, grafik dan simulasi software dengan menggunakan putaran yang sama 7500 RPM, hanya saja dipilih sudut gerak poros engkol saat poros engkol membentuk sudut 1200 dari sumbu-x.
Gambar 4.9 Mekanisme Engkol luncur
Perhitungan secara analitik ini diambil pada satu titik pada saat poros engkol membentuk sudut 1200
Dimana R merupakan panjang poros engkol dan L adalah panjang connecting rod
maka perpindahan piston seperti yang sebelumnya dibahas pada bab II persamaan (2-5) sub-bab 2.3.3 persamaan posisi, kecepatan dan percepatan piston (Andre Wisudha).
.
Kecepatan piston
Pada kecepatan putaran poros engkol 7500 RPM atau setara 785.7143 rad/s
Percepatan piston
Percepatan angular connecting rod yang merupakan turunan kecepatan angular terhadap waktu.
Percepatan titik berat connecting rod untuk komponen horizontal adalah
Percepatan titik berat connecting rod untuk komponen vertikal adalah
Kecepatan poros engkol
Percepatan poros engkol
Percepatan titik berat poros engkol
Gambar 4.10 Mekanisme engkol luncur
Berikut perhitungan secara grafik saat poros engkol membentuk sudut 1200 Analisa Kecepatan
.
Gambar 4.11 Grafik kecepatan
OV
VC
VP
VP/C
1200
C
O
P
ω
L
R
g
3Analisa Percepatan
Karena kecepatan poros engkol atau link O2
Arahnya berhimpit dengan link O
C konstan maka percepatan = 0, sehingga percepatan tangensial pada A = 0. Sehingga,
2C dan mengarah pada O2
Percepatan pada P,
Dengan 1 cm = 1880 m/s2
Gambar 4.12 Grafik percepatan
Percepatan titik berat di poros engkol, karena letak titik berat G2 = R/L atau O2C/2, maka aG2
Percepatan titik berat di connecting rod, ,
Oa Ap
anP/C
atP/C
aC
aP/C
aG3
Sehingga percepatan titik berat (aG3), pada grafik jarak aG3
Sedangkan percepatan pada titik berat piston sama dengan percepatan piston itu sendiri.
adalah, 6.8 cm.
Berikut perbandingan hasil dari perhitungan secara analitik, grafik, dan simulasi.
Tabel 4.1 Hasil perhitungan kinematis
Analitik Grafik Simulasi Kecepatan Angular connecting rod
(rad/s) 113.5278 113.81 113.5278
Percepatan Angular connecting rod
(rad/s2) 151274.1422 152186.9 151213.281
Percepatan titik berat connecting rod
(m/s2
12776.22 )
Untuk mengetahui gaya-gaya yang bekerja pada peluncur dapat dilihat pada gambar 4.13. Metode yang digunakan untuk mengetahui gaya-gaya yang bekerja pada tiap bantalan menggunakan metode analitik.
[image:81.595.235.413.175.321.2]
Gambar 4.13 Diagram benda bebas piston
Pada gambar 4.13 dapat dilihat bahwa, untuk komponen horisontal
Untuk mengetahui gaya-gaya yang bekerja pada batang hubung atau connecting rod dapat dilihat pada gambar 4.14
Gambar 4.14 Diagram benda bebas connecting rod
P Fg mpap
Fpy Fpx Wp N Fpx Fcx
mc.acgx
mc.acgy
Dari gambar dapat dilihat connecting rod CP, yang mengalami percepatan angular yang arahnya searah sumbur-z menimbulkan momen inersia Izz
.
Karena FCY dan FPY
belum diketahui, dengan menggunakan momen pada titik G.
Sehingga dapat diketahui FCY
,
[image:83.595.85.271.407.591.2]
Izz didapat dari hasil pengukuran dengan menggunakan software SOLIDWORKS.
Gambar 4.15 Diagram benda bebas poros engkol
(2.23)
Fcx
Frx
Fry
Fcy mpe.agpy
mpe.agpx
Analisa Torsi
Gambar 4.16 Diagram benda bebas crankshaft
T FCX
FCY
θ
C
O
Gaya Terkonsentrasi Pada Pena
Gambar 4.17 Grafik gaya-gaya resultan pada pena vs sudut engkol
0 1000 2000 3000 4000 5000 6000 7000
0 30 60 90 120 150 180 210 240 270 300 330 360 390 420 450 480 510 540 570 600 630 660 690 720
G ay a p ad a ti ap b an tal an , N e w to n
Sudut Putar Poros Engkol, Deg
Fp
Fc
Tabel di bawah merupakan tabulasi pada perhitungan sebelumnya yang diperoleh dengan metode analitik, seperti yang dijelaskan sebelumnya pada bab II. Berikut tabulasi kecepatan sudut, percepatan sudut, percepatan titik berat connecting rod
[image:86.595.74.561.247.751.2]untuk komponen horisontal dan vertikal, percepatan titik berat connecting rod itu sendiri yang merupakan resultan dari komponen horizontal dan vertikal.
Tabel 4.2 Hasil perhitungan kinematika secara analitik
θ
Kecepatan Sudutω
2
Percepatan Sudut
α
, rad/s
2,
rad/sPercepatan titik berat
agx, m/s 2
Percepatan titik berat
agy, m/s 2 Percepatan titik berat G 2
3, m/s2
0 -220.2626528 0 -18009.22551 0
18009.23 15 -213.3196206 41600.10349 -17242.72861 -2709.087
17454.25 30 -192.6549704 82140.2216 -15025.94006 -5233.553
15911.28 45 -158.9024299 119745.3665 -11602.46701 -7401.362
13762.17 60 -113.5278268 151274.1422 -7356.269913 -9064.78
11674.11 75 -59.22061248 172667.6099 -2759.306058 -10110.45
10480.22 90 -1.40563E-14 180292.8155 1718.436758 -10467.11
10607.23 105 59.22061248 172667.6099 5709.094638 -10110.45
11610.98 120 113.5278268 151274.1422 9003.423964 -9064.78
12776.22 135 158.9024299 119745.3665 11533.63395 -7401.362
13704.19 150 192.6549704 82140.2216 13309.88093 -5233.553
14301.85 165 213.3196206 41600.10349 14361.77304 -2709.087
14615.05 180 220.2626528 1.95366E-11 14710.16225 8.79803E-12
14710.16 195 213.3196206 -41600.10349 14361.77304 2709.087
14615.05 210 192.6549704 -82140.2216 13309.88093 5233.553
14301.85 225 158.9024299 -119745.3665 11533.63395 7401.362
240 113.5278268 -151274.1422 9003.423964 9064.78
12776.22 255 59.22061248 -172667.6099 5709.094638 10110.45
11610.98 270 4.2169E-14 -180292.8155 1718.436758 10467.11
10607.23 285 -59.22061248 -172667.6099 -2759.306058 10110.45
10480.22 300 -113.5278268 -151274.1422 -7356.269913 9064.78
11674.11 315 -158.9024299 -119745.3665 -11602.46701 7401.362
13762.17 330 -192.6549704 -82140.2216 -15025.94006 5233.553
15911.28 345 -213.3196206 -41600.10349 -17242.72861 2709.087
17454.25 360 -220.2626528 -3.90731E-11 -18009.22551 1.1279E-11
18009.23 375 -213.3196206 41600.10349 -17242.72861 -2709.087
17454.25 390 -192.6549704 82140.2216 -15025.94006 -5233.553
15911.28 405 -158.9024299 119745.3665 -11602.46701 -7401.362
13762.17 420 -113.5278268 151274.1422 -7356.269913 -9064.78
11674.11 435 -59.22061248 172667.6099 -2759.306058 -10110.45
10480.22 450 -7.02817E-14 180292.8155 1718.436758 -10467.11
10607.23 465 59.22061248 172667.6099 5709.094638 -10110.45
11610.98 480 113.5278268 151274.1422 9003.423964 -9064.78
12776.22 495 158.9024299 119745.3665 11533.63395 -7401.362
13704.19 510 192.6549704 82140.2216 13309.88093 -5233.553
14301.85 525 213.3196206 41600.10349 14361.77304 -2709.087
14615.05 540 220.2626528 5.86097E-11 14710.16225 -4.0249E-11
14710.16 555 213.3196206 -41600.10349 14361.77304 2709.087
14615.05 570 192.6549704 -82140.2216 13309.88093 5233.553
585 158.9024299 -119745.3665 11533.63395 7401.362
13704.19 600 113.5278268 -151274.1422 9003.423964 9064.78
12776.22 615 59.22061248 -172667.6099 5709.094638 10110.45
11610.98 630 9.83944E-14 -180292.8155 1718.436758 10467.11
10607.23 645 -59.22061248 -172667.6099 -2759.306058 10110.45
10480.22 660 -113.5278268 -151274.1422 -7356.269913 9064.78
11674.11 675 -158.9024299 -119745.3665 -11602.46701 7401.362
13762.17 690 -192.6549704 -82140.2216 -15025.94006 5233.553
15911.28 705 -213.3196206 -41600.10349 -17242.72861 2709.087
17454.25 720 -220.2626528 -7.81463E-11 -18009.22551 0
18009.23
Pada tabel di bawah, merupakan tabulasi dengan menggunakan metode analitik. Dimana diantaranya komponen gaya horizontal dan vertikal pada titik C, atau sambungan antara poros engkol dan connecting rod. Serta torsi pada poros engkol. Dengan interval perubahan sudut adalah 150
Tabel 4.3 Gaya pada bantalan
.
θ
Fcx Fcy Fc Torsi0 480.2653697 0.541486 480.2657 -0.01435
15 -287.4446563 -249.898 380.8851 4.425153
30 261.9773116 -547.382 606.844 16.03345
45 1086.316865 -911.108 1417.816 37.4284
60 2066.869211 -1315.04 2449.753 64.8583
90 3982.0503 -1948.77 4433.332 105.5243
105 4717.701124 -2021.56 5132.582 106.8939
120 5247.030104 -1884.7 5575.251 95.44533
135 5583.74353 -1562.13 5798.142 75.3583
150 5770.177554 -1105.51 5875.125 51.08383
165 5856.15442 -569.793 5883.809 25.58061
180 5880.056416 0.541486 5880.056 0.014349
195 5856.15442 570.8765 5883.914 -25.5529
210 5770.177554 1106.59 5875.329 -51.059
225 5583.74353 1563.214 5798.433 -75.338
240 5247.030104 1885.784 5575.617 -95.431
255 4717.701124 2022.641 5133.009 -106.886
270 3982.0503 1949.854 4433.808 -105.524
285 3071.528713 1691.207 3506.347 -90.2215
300 2066.869211 1316.127 2450.334 -64.8727
315 1086.316865 912.1908 1418.512 -37.4487
330 261.9773116 548.4654 607.821 -16.0583
345 -287.4446563 250.9811 381.5966 -4.45287
360 -480.2653697 0.541486 480.2657 -0.01435
375 -287.4446563 -249.898 380.8851 4.425153
390 261.9773116 -547.382 606.844 16.03345
405 1086.316865 -911.108 1417.816 37.4284
435 3071.528713 -1690.12 3505.825 90.21409
450 3982.0503 -1948.77 4433.332 105.5243
465 4717.701124 -2021.56 5132.582 106.8939
480 5247.030104 -1884.7 5575.251 95.44533
495 5583.74353 -1562.13 5798.142 75.3583
510 5770.177554 -1105.51 5875.125 51.08383
525 5856.15442 -569.793 5883.809 25.58061
540 5880.056416 0.541486 5880.056 0.014349
555 5856.15442 570.8765 5883.914 -25.5529
570 5770.177554 1106.59 5875.329 -51.059
585 5583.74353 1563.214 5798.433 -75.338
600 5247.030104 1885.784 5575.617 -95.431
615 4717.701124 2022.641 5133.009 -106.886
630 3982.0503 1949.854 4433.808 -105.524
645 3071.528713 1691.207 3506.347 -90.2215
660 2066.869211 1316.127 2450.334 -64.8727
675 1086.316865 912.1908 1418.512 -37.4487
690 261.9773116 548.4654 607.821 -16.0583
705 -287.4446563 250.9811 381.5966 -4.45287
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
1. Pada analisa secara analitik kecepatan angular connecting rod adalah sebesar 220 rad/s saat poros engkol membentuk sudut 00, 1800, 3600, 5400, 7200 dan percepatan angular connecting rod adalah 180292.8155 rad/s2 saat poros engkol membentuk sudut 900, 2700, 4500, 6300. Sedangkan percepatan maximum pada titik berat connecting rod adalah 18009.2 m/s2 saat poros engkol membentuk sudut 00, 3600, 7200
2. Pada analisa gaya-gaya pada bantalan mekanisme engkol luncur, didapat nilai maximum F
C (gaya pada pena engkol) 5883.91 Newton.
5.2 Saran
1. Simulasi dengan bantuan komputer sangat membantu dalam proses desain komponen suatu mesin. Namun pengujian laboratorium merupakan syarat mutlak untuk mengetahui kondisi real dilapangan.
DAFTAR PUSTAKA
1. Beer-Johnston-Cornwell (2009). Vector Dynamic for Engineers : Dynamics, Ninth Edition. McGraw-Hill.
2. Heywood, John. B. (1988). Internal Combustion Engine Fundamentals. McGraw-Hill Series in Mechanical Engineering.
3. Khurmi, R. S. and Ghupta, J. K. (2004). Theory of Machines. S. Chand.
4. Navarro, M (2009). Analisa Pengaruh Kekuatan Pegas Terhadap Displacement Poros Engkol Menggunakan Simulasi Elemen Hingga.: Tugas Akhir Mahasiswa Departemen Teknik Mesin Sumatera Utara.