ANALISA DINAMIK GAYA GONCANG MOTOR BAKAR SATU SILINDER
DENGAN BANTUAN PERANGKAT LUNAK MATLAB
Tugiman
Staf Pengajar Departemen Teknik Mesin Fakultas Teknik Mesin
Abstrak: Makalah ini memaparkan analisa dinamik gaya goncang pada motor bakar satu silinder pada putaran
konstan 10500 rpm dan daya 22,1 kW. Analisa dilakukan dengan bantuan perangkat lunak MATLAB 7.1 untuk menganalisa gaya-gaya inersia yang terjadi pada bantalan dan pena-pena yang terdapat pada mekanisme motor bakar (engkol peluncur). Gaya goncang yang terjadi akan direduksi dengan penambahan bobot pengimbang yang bervariasi massanya, sehingga diperoleh nilai massa yang optimal sesuai putaran kerja motor bakar.
Kata kunci: Engkol Peluncur, Gaya Goncang, Massa Penyeimbang,Penyeimbangan
Abstract: This paper explains a dynamic analysis of a one cylinder internal combustion engine at constant circle
10500 rpm at 22.1 kW of power. Analysis was made by computer aided with MATLAB 7.1 software in analyzing the inertia forces at bearing and pins due to internal combustion engine mechanism (crank slider). The shaking force will be reduced by set a variation mass of counterweight, and then it will be found an optimal mass due to working circle of the combustion engine.
Keywords: Crank Slider, Shaking Force, Counter Weight, Balancing
I. PENDAHULUAN
Motor bakar adalah salah satu alat konversi energi yang berfungsi untuk mengubah energi kimia bahan bakar menjadi energi kinetik. Dalam tulisan ini, motor bakar satu silinder dipilih untuk menjadi objek penelitian, yakni motor bakar pada sepeda motor Kawasaki Ninja-RR Sport. Di mana kendaraan ini dirancang untuk mencapai kecepatan tinggi di arena balap.
Sebuah motor balap pada kondisi kecepatan tinggi tentunya harus memenuhi persyaratan yang ketat agar layak digunakan. Salah satunya adalah kendaraan harus stabil pada putaran tinggi, artinya getaran yang ditimbulkan oleh putaran mesin harus dalam batas yang ditentukan.
Gambar 1. Sepeda motor Kawasaki Ninja RR Sport
Suatu mekanisme yang tidak seimbang atau tidak stabil akan mengakibatkan
kebisingan, getaran, tegangan-tegangan akibat getaran, keausan, dan terlepasnya sambungan-sambungan akibat getaran dan keausan.
Dalam mendesain kekuatan komponen-komponen motor bakar, adalah penting untuk menghitung besar gaya-gaya dan momen yang bekerja pada setiap komponen. Motor bakar sebagai salah satu contoh dari mekanisme engkol peluncur, mempunyai komponen-komponen kritis seperti bantalan (bearing) dan pena (pin). Hal ini disebabkan oleh terkonsentrasinya gaya-gaya pada elemen ini.
Dalam mekanisme yang beroperasi pada putaran tinggi, besar gaya-gaya yang timbul akibat adanya percepatan massa komponen akan lebih besar dibandingkan gaya-gaya statis yang bekerja pada komponen mesin itu sendiri [1, hal 395].
Pada tulisan ini ada 3 tujuan utama yang akan diteliti:
1. Mengkaji konsentrasi gaya-gaya yang dialami bantalan dan pena dari mekanisme motor bakar pada kondisi putaran maksimum.
2. Menghitung besar gaya goncang yang ditimbulkan.
3. Menentukan besar massa penyeimbang untuk mereduksi besar gaya goncang.
Metode untuk menganalisa gaya-gaya pada mekanisme ini adalah dengan metode analitis yang diprogram dengan menggunakan bahasa tingkat tinggi (High Level Language)
MATLAB 7.01 yang diproduksi oleh perusahaan The Mathwork, Inc.
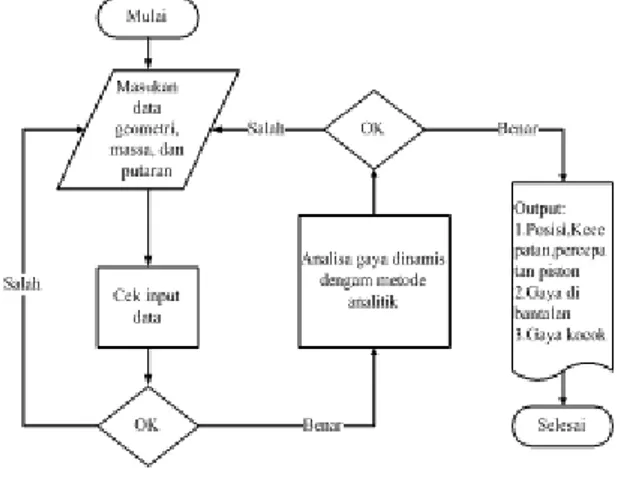
Proses analisa mekanisme engkol peluncur dengan bantuan perangkat lunak (software) ini dapat dilihat pada diagram alur (flow chart) berikut.
Gambar 2. Diagram Alur Tahapan Utama Analisa Dinamis Motor Bakar Satu Silinder
Gaya Goncang
Gambar 3. Model Osilasi Akibat Gaya Goncang
Gambar 3 menunjukkan diagram benda bebas dari sebuah mekanisme engkol peluncur. FO4 adalah vektor gaya inersia yang bekerja pada
pusat torak (batang 4), yang besarnya adalah FO4
= M4Ag4. FB3 adalah vektor gaya inersia yang
bekerja pada titik massa bergerak batang hubung, MB3, yang letaknya pada pena torak
(wrist pin) B dan sepusat dengan pusat torak. Besar dari FB3 adalah FB3 = MB3.AB. Ini
menunjukkan bahwa karena pusat torak sepusat
dengan pena torak B, Ag4 = AB. F41 adalah gaya
reaksi torak terhadap dinding silinder. F21 adalah
gaya dari poros engkol yang bekerja pada bantalan-bantalan poros engkol (main bearing) yang terletak pada blok mesin (engine block). Penjumlahan dari gaya-gaya inersia FO4 dan FB3
akan menimbulkan resultan gaya goncang S, yang menyebabkan blok mesin berosilasi naik turun tergantung pada arah dari gaya-gaya inersia selama siklus mekanisme. Jadi, efek dari massa yang bergerak bolak-balik, yakni massa torak M4 ditambah massa bergerak MB3 dari
batang hubung, pada blok mesin adalah gaya goncang vertikal atau getaran vertikal mesin Mekanisme Engkol Peluncur
Motor bakar satu silinder menggunakan mekanisme engkol peluncur dalam pengoperasiannya seperti pada Gambar 4. Untuk aplikasi mekanisme ini pada sebuah motor bakar, usaha hasil pembakaran bahan bakar dan oksigen yang berekspansi akan mendorong torak atau piston yang dilanjutkan ke batang penghubung yang akan memutar poros engkol, yang kemudian diidealisasikan akan menghasilkan putaran konstan dengan bantuan sebuah roda gila (fly wheel).
Gambar 4. Geometri Mekanisme Engkol Peluncur
Persamaan Posisi, Kecepatan, dan Percepatan Torak
Seperti yang didiskusikan Mabie dan Reinholtz[1], perpindahan X dari peluncur torak (Batang 4) dimulai dari titik mati atas (TMA/, top dead center [TDC]) dapat dihitung dari Gambar 4: ) cos cos ( ) (R L R θ2 L φ X = + − + ) cos 1 ( ) cos 1 ( − θ2 + − φ =R L
Dapat dilihat juga bahwa:
2 sin sinφ R θ L = 2 sin sinφ θ L R =
Dengan menggunakan rumus identitas trigonometri dari cosφ= 1−sin2φ dan
mensubsitusikan persamaan tersebut, perpindahan X dapat ditulis kembali dengan:
⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − − + − = 2 2 2 2) 1 1 sin cos 1 ( θ θ L R L R X
Persamaan X dapat disederhanakan untuk memudahkan perhitungan dengan mengganti
2 2 2 sin 1 ⎟ θ ⎠ ⎞ ⎜ ⎝ ⎛ − L R
dengan deret binomial dari:
... 8 . 6 . 4 . 2 5 . 3 . 1 6 . 4 . 2 3 . 1 4 . 2 2 1 1 ) 1 ( 8 6 4 2 2 / 1 2 = ± − ± − ± ±B B B B B di mana 2 sinθ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = L R B .
Pada penggunaan secara umum, ketelitian yang cukup dapat diperoleh dengan menggunakan dua orde pertama dari deret binomial tersebut. Dengan menerapkan deret ini akan menghasilkan: ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − − + − = 2 2 2 2 sin 2 1 1 1 ) cos 1 ( θ θ L R L R X 2 2 2 2) 2 sin cos 1 ( θ ⎟⎟ θ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − = L R R
Dengan θ2=ω2.t di mana ω2 adalah
konstan, dari hasil turunan pertama dan turunan kedua dari persamaan X terhadap waktu, maka kecepatan dan percepatan peluncur torak diperoleh: ⎥⎦ ⎤ ⎢⎣ ⎡ + = = ω2 sinθ2 2 sin2θ2 L R R dt dx V ⎥⎦ ⎤ ⎢⎣ ⎡ + = = 2 2 2 2 2 2 2 cos cosθ θ ω L R R dt x d A
Analisa Mekanisme Engkol Peluncur Dengan Persamaan Loop Tertutup dan Bilangan Kompleks
Pada mekanisme engkol peluncur pada Gambar 5, engkol berputar pada kecepatan sudut konstan ω2, dan kecepatan linear peluncur VB
dan percepatan peluncur AB akan dihitung.
Seperti yang ditunjukkan, posisi relatif partikel B terhadap titik tetap O2 ditulis dengan notasi rB.
Pada Gambar 5 dapat dilihat bahwa persamaan dua vektor independen ditulis dengan rB, dengan
sebutan rB = r1 dan rB = r2 + r3 .
Gambar 5. Mekanisme Engkol Peluncur Pada Putaran ω2Konstan
Gambar 6. Posisi Sudut θ2dan Sudut θ3
Sehingga dapat ditulis:
3 2
1 r r
r = +
Jika vektor di atas diubah ke bentuk bilangan kompleks, bilangan riil, dan bilangan imajiner dapat dilihat pada Gambar 6, dan persamaan ditulis kembali:
3 2 1 3 2 1 θ θ θ i i i e r e r e r = +
di mana r2 dan r3 adalah panjang tetap batang 2
dan batang 3, dan r1 memiliki panjang variabel
sesuai posisi engkol. Sudut θ1pada r1 ditetapkan
pada θ1= 0o sehingga
e
iθ1=1. Maka,2 3 3 2 1 θ θ i i e r e r r = +
Dua kali diferensiasi berturut-turut dari persamaan r1 menghasilkan kecepatan VB dan
percepatan AB:
( )
2( )
3 3 3 2 2 1 . θ θ ω ω i i B r r ie r ie V = = +(
)
2(
2)
3 3 3 3 2 2 2 2 1 .. θ θ α ω ω α i i B r r i e r i e A = = − + −Pada persamaan ini, r2,r3,θ2,ω2 dan α2
diketahui besarnya, dan enam anu yang harus dicari adalah r1,r&1,r&&1,θ3,ω3dan α3.
Dua besaran yang tidak diketahui, r1dan
3
θ dapat dihitung dari persamaan r1 dengan
memisahkan bilangan ril dan bilangan imajiner persamaan tersebut:
r1 =r2
(
cosθ2+isinθ2) (
+r3 cosθ3+isinθ3)
r1 =r2cosθ2+r3cosθ3 (bilangan ril)
0 =r2sinθ2+r3sinθ3 (bilangan imajiner)
Dari bilangan imajiner dapat pula dihitung besar sudut
θ
3 ;⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − = − 2 3 2 1 3 sin sinθ θ r r
Persamaan bilangan riil, berikutnya dapat menghitung r1.
Dengan cara yang sama,
r
&
1danω
3 dapat diperoleh dari persamaan VB denganmemisahkan bilangan ril dan bilangan
imajinernya:
(
2 2)
3 3(
3 3)
2 2
1 =rω icosθ −sinθ +rω icosθ −sinθ
r& 3 3 3 2 2 2 1 rω sinθ rω sinθ
r& =− − (bilangan ril)
3 3 3 2 2 2 cos cos 0 =rω θ +rω θ (bilangan imajiner)
Persamaan bilangan imajiner vektor kecepatan mendapatkan nilai
ω
3:⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − = 3 3 2 2 3 cos cos θ θ ω r r
Sementara itu, r1&&dan α3, diperoleh dari bilangan
ril dan bilangan imajiner persamaan AB:
(
) (
3 2 3)
2 3 3 2 2 2 2 2 21 =−r ω cosθ +α sinθ −r ω cosθ +α sinθ
r&& (bilangan ril)
(
) (
3)
2 3 3 3 3 2 2 2 2 22 cos sin cos sin
0 =r α θ −ω θ +r α θ −ω θ
(bilangan imajiner)
Dari persamaan bilangan imajiner AB,
α
3dapat ditentukan:
(
)
3 3 2 3 3 3 2 2 2 2 2 2 3 cos sin cos cos sin θ θ ω θ θ α θ ω α = − + r rAnalisa Gaya-Gaya pada Motor Bakar Satu Silinder dengan Metode Massa Terkonsentrasi
Pada Gambar 7 diperlihatkan mekanisme sebuah motor bakar satu silinder dengan pendekatan massa terkonsentrasi ekuivalen batang hubung. Salah satu massa, MB3, berlokasi
pada pena piston, dan yang lain terkonsentrasi di pena engkol, MA3. Kemudian, beban dinamis
batang hubung diwakili oleh vektor gaya inersia FB3 dan FA3 , besar gaya FB3 = MB3 . AB dan FA3 =
MA3 . AA. Untuk semua fase mekanisme, garis
aksi FB3 berada di sepanjang garis bolak-balik
pada pena piston, dan FA3 selalu mengarah
keluar dari sumbu engkol secara seragam.
Gambar 7. Gaya-Gaya yang Bekerja Pada Mekanisme Motor Bakar
Sesuai Gambar 7, sudah merupakan hal umum untuk menambahkan massa Mcw pada
massa pengimbang (counterweight) engkol yang kemudian akan membangkitkan Fcw untuk
menghilangkan gaya FA3 massa batang hubung.
Dengan cara ini, massa-massa yang berputar bersama engkol (massa engkol ditambah MA3)
diseimbangkan sehingga pusat massa terletak di O2 sehingga tidak ada gaya yang beraksi pada
bantalan poros engkol.
Gambar 7 menunjukkan gaya-gaya yang beraksi pada mekanisme. Dari gaya-gaya ini, P,FO4,FA3,FB3, dan Fcw diketahui besar dan arah
vektornya; F14 diketahui hanya arahnya. Tidak
ada yang diketahui pada gaya F12 yang bekerja
pada titik O2. Persamaan untuk gaya-gaya ini,
kecuali F12, dapat ditulis:
F4 = (P + FO4) i
FB3 = FB3 j
FA3 =FA3
(
cos(
90−θ2)
i+sin(
90−θ2)
j)
FCW=−FA3
(
cos(
90−θ2)
i+sin(
90−θ2)
j)
F14 = F14 i
Pada gambar 8 diperlihatkan diagram benda bebas piston dan bagian atas batang hubung. Pada elemen ini beraksi gaya-gaya F4,FB3,F14, dan FCR .
Arah garis gayanya adalah sepanjang batang hubung karena batang hubung diganti menjadi dua massa terkonsentrasi. Persamaan untuk FCR dapat ditulis sebagai berikut:
FCR = =FCR(−sinφi+cosφ j)
Karena piston dan bagian atas batang hubung berada pada kondisi setimbang oleh empat buah gaya yang beraksi,maka:
F4 + FB3 + F14 + FCR = 0
Dengan melihat gambar 9, yang mana memperlihatkan bagian atas batang hubung dikenai gaya-gaya FB3 , FCR dan F43. Persamaan
kesetimbangan berikut dapat ditulis: FB3 + FCR + F43 = 0
Gambar 9. Gaya-Gaya yang Bekerja pada Batang Hubung Terkonsentrasi di Titik B (dari Mabie dan Reinholtz[1])
Gambar 10 menunjukkan diagram benda bebas bagian bawah batang hubung yang dikenai gaya-gaya FCR , FA3 dan F23. Persamaan
kesetimbangan berikut dapat dituliskan: FCR + FA3 + F23 = 0
Gambar 10. Gaya-gaya yang Bekerja pada Batang Hubung Terkonsentrasi di Titik A (dari Mabie dan Reinholtz[1])
Gambar 11 menunjukkan engkol dan pengimbang dikenai gaya-gaya F32 , FCW, dan
F12. Persamaan kesetimbangannya adalah:
F32 + FCW + F12 = 0
Gambar 11. Gaya-Gaya yang Bekerja pada Poros Engkol (dari Mabie dan Reinholtz[1])
Dan akhirnya torak poros engkol Ts, dapat dengan mudah dihitung dengan korelasi:
Ts = F14 . h
Penyeimbangan Mesin Bolak-balik
Gambar 12 memperlihatkan mekanisme engkol peluncur dengan panjang engkol r, panjang batang l, dan massa bolak-balik M. Diasumsikan bahwa material-material ini berotasi pada putaran
ω
konstan. Juga diasumsikan bahwa ketidakseimbangan rotasi yang berhubungan dengan mekanisme ini diseimbangkan oleh massa penyeimbang yang dipasang pada engkol. Hal ini secara umum dilakukan untuk mengurangi gaya-gaya inersia yang dihasilkan engkol dan bagian massa berputar batang hubung.Gambar 12. Gaya Inersia Massa Bolak-balik
Gambar 13. Diagram Benda Bebas Kerangka Mesin
Gambar 13 memperlihatkan diagram benda bebas dari kerangka mesin. Berdasarkan asumsi-asumsi di atas dan analisa dinamis sebelumnya, gaya-gaya yang ditransmisikan terhadap penyokong-penyokong mekanisme diperoleh dari persamaan gaya-gaya yang bekerja pada pena-pena.
Efek total dari gaya-gaya ini adalah gaya goncang F12x dan kopel kocok gaya-gaya yang
sama besar dan berlawanan F12y dan F41y. Gaya
kerangka mesin. Mesin Satu Silinder
Suatu pendekatan yang digunakan untuk memperoleh gaya seimbang pada mesin satu silinder dan kompresor adalah dengan penambahan massa berputar penyeimbang pada engkol. Massa penyeimbang ini adalah dalam arti penambahan dari yang telah disebutkan di atas, yang digunakan untuk menyeimbangkan ketidakseimbangan rotasi massa engkol dan massa berputar batang hubung. Gambar 14 memperlihatkan mekanisme dari Gambar 12 dengan massa penyeimbang MC yang terpasang
pada engkol pada jarak radial rC dari sumbu
bantalan poros engkol (Main Bearing) dan pada posisi φ+180°.
Gambar 14. Pengurangan Efek Gaya Goncang dengan Penambahan Massa Penyeimbang
Gambar 15. Gaya Goncang Neto
Massa ini menghasilkan gaya sentrifugal yang besarnya konstan pada O1 dan berotasi
dengan kecepatan
ω
. Total gaya goncang berikutnya akan merupakan penjumlahan vektor gaya sentrifugal massa penyeimbang dan gaya inersia massa bergerak translasi, seperti yang ditunjukkan pada Gambar 15. Di dalam komponen vektor pada sumbu-x dan sumbu-y,j r M i r M l r Mr Mr F C C C C s θ ω θ ω θ ω θ ω sin cos 2 cos cos 2 2 2 2 − ⎥⎦ ⎤ ⎢⎣ ⎡ + − =
Dari analisa persamaan di atas, massa penyeimbang ini tidak dapat mengeliminasi gaya goncang, karena akan tetap menghasilkan komponen y yang tidak nol. Namun demikian, dengan menentukan ukuran tepat koreksi MCrC,
besar gaya maksimum gaya goncang dapat dikurangi. Besar koreksi secara umum
digunakan adalah pada batas
2 Mr r MC C = sampai 3 2Mr r MC C = [2,hal. 261] .
Dalam pemrograman penulis akan lebih berfokus pada analisa perhitungan gaya-gaya yang bekerja pada mekanisme motor bakar dan hal-hal yang sangat mempengaruhi timbulnya gaya goncang Sehingga dapat ditentukan tindakan yang dapat mengurangi gaya tersebut. Hasil perhitungan ini dapat dijadikan rujukan untuk merencanakan motor bakar satu silinder, terutama dalam pemilihan material elemen mesin.
II. STUDI KASUS
Spesifikasi Motor Bakar Satu Silinder
Dalam makalah ini penulis memilih motor bakar dari merek Kawasaki Ninja RR Sport sebagai objek penelitian. Adapun spesifikasi motor bakar ini dapat ditabulasikan dalam Tabel 1 di bawah ini:
Tabel 1. Spesifikasi Kawasaki Ninja RR Sport
Tipe 2 Langkah
Diameter x Langkah 59.0 mm x 54.4 mm Jumlah Silinder Satu buah
Perbandingan
Kompresi 7.2: 1
Daya Maksimum 22.1 kW / 10500 rpm Torsi Maksimum 2.2 kgm / 9000 rpm
Berat 124,5 kg
Dimensi Motor Bakar Satu Silinder
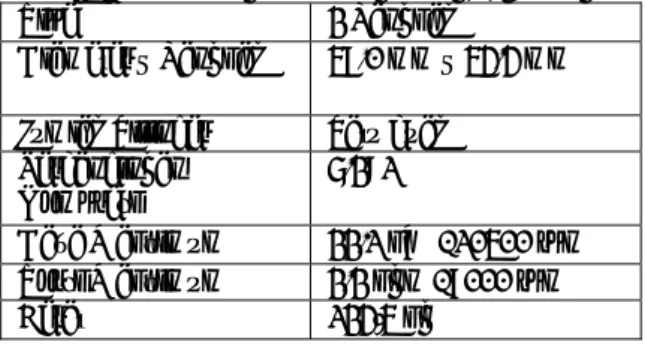
Dimensi elemen mekanisme motor bakar ini, penulis menperolehnya dengan survai ke ruang pamer Kawasaki dan melakukan pengukuran langsung di showroom. Dan bila kita bandingkan dengan gambar sederhana berupa mekanisme engkol peluncur seperti yang terdapat pada gambar 4, maka hasil pengukuran dapat ditabulasikan pada Tabel 2 sebagai berikut:
Tabel 2. Dimensi Elemen Motor Bakar Kawasaki Ninja RR Sport
Elemen Mesin Dimensi Massa
Piston Diameter: 59 mm 175 gr Batang Hubung (L) 95 mm 175 gr Poros Engkol (R) 27,2 mm 2200 gr Pena Piston - 50 gr Pena Engkol - 150 gr
III. ANALISA HASIL PERHITUNGAN Analisa Posisi, Kecepatan, dan Percepatan Piston
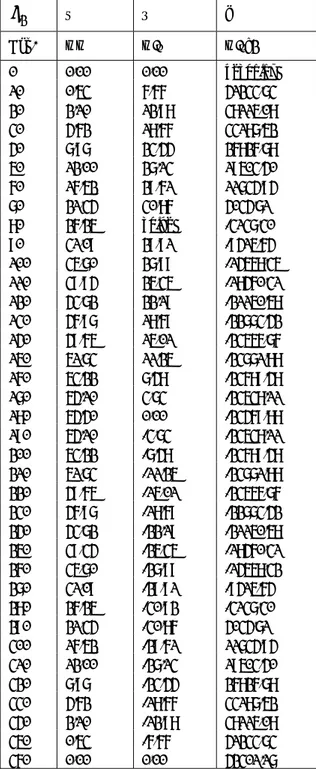
Dari perhitungan dengan pemrograman posisi, kecepatan, dan percepatan piston seperti pada Gambar 4 diperoleh hasil seperti pada Tabel 3:
Tabel 3. Posisi, Kecepatan, dan Percepatan Piston
2
θ
x v a Deg. mm m/s m/s^2 0 0.00 0.00 42301.17 10 0.53 6.66 41233.73 20 2.10 12.98 38115.08 30 4.62 18.66 33187.52 40 7.97 23.44 26826.78 50 12.00 27.13 19503.40 60 16.52 29.61 11734.94 70 21.34 30.86 4034.71 80 26.25 30.92 -3137.30 90 31.09 29.91 -9415.64 100 35.70 27.99 -14558.35 110 39.94 25.35 -18460.31 120 43.72 22.19 -21150.58 130 46.97 18.69 -22773.42 140 49.65 15.01 -23556.76 150 51.73 11.25 -23771.88 160 53.22 7.48 -23689.48 170 54.10 3.73 -23538.11 180 54.40 0.00 -23469.88 190 54.10 -3.73 -23538.11 200 53.22 -7.48 -23689.48 210 51.73 -11.25 -23771.88 220 49.65 -15.01 -23556.76 230 46.97 -18.69 -22773.42 240 43.72 -22.19 -21150.58 250 39.34 -25.35 -18460.31 260 35.70 -27.99 -14558.32 270 31.09 -29.91 -9415.64 280 26.25 -30.92 -3137.30 290 21.34 -30.86 4034.71 300 16.52 -29.61 11734.94 310 12.00 -27.13 19503.40 320 7.97 -23.44 26826.78 330 4.62 -18.66 33187.52 340 2.10 -12.98 38115.08 350 0.53 -6.66 41233.73 360 0.00 0.00 42301.17Dari Tabel 3 dapat disimpulkan:
Kecepatan maksimum : 30.92 m/s Percepatan maksimum :
42301.17 m/s^2
Hasil perhitungan di atas ditampilkan dalam grafik pada gambar 16, 17, dan 18.
Gambar 16. Grafik Posisi Piston vs Sudut Engkol
Gambar 17. Grafik Kecepatan Piston vs
θ
2Gambar 18. Grafik Percepatan Piston vs
θ
2Analisa Konsentrasi Gaya-gaya di Bantalan dan Pena
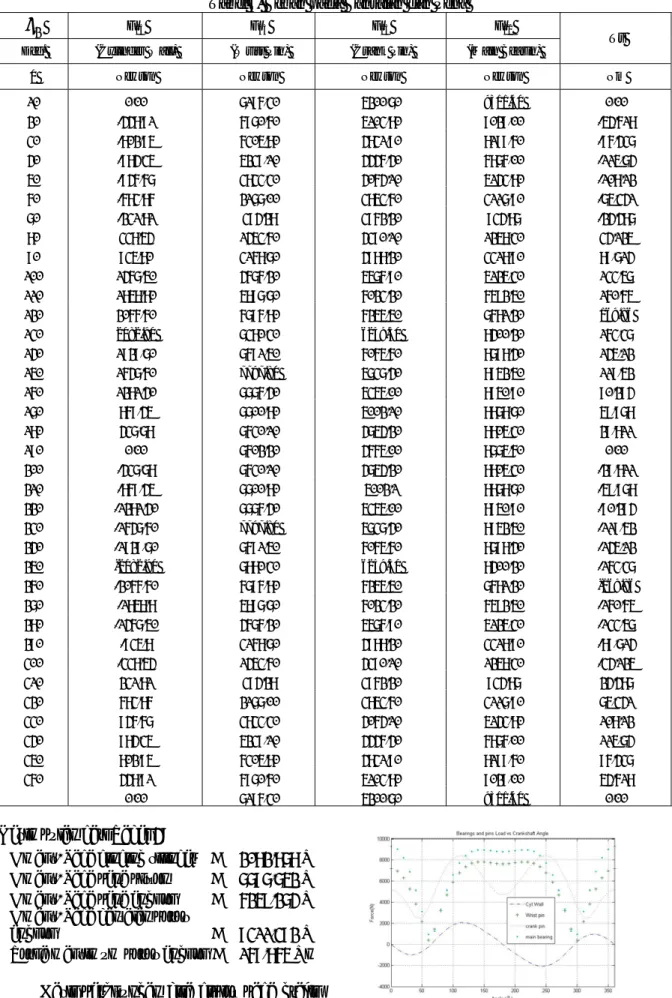
Dari perhitungan gaya-gaya yang bekerja pada bantalan dan pena tanpa bobot imbang pada mekanisme diperoleh pada Tabel 4:
Tabel 4. Beban pada Bantalan dan Pena
2
θ
F14 F43 F23 F12Ts Deg. (Cylinder Wall) (Wrist Pin) (Crank Pin) (Main Bearin)
0 Newton Newton Newton Newton Nm
10 0.00 7196.30 5200.70 9311.40 0.00 20 -448.91 6970.60 5103.80 9029.00 -54.618 30 -802.95 6305.80 4831.90 8199.60 -96.437 40 -984.35 5239.10 4446.40 6876.00 -115.74 50 -946.67 3833.30 4064.10 5143.80 -108.12 60 -683.86 2177.00 3853.60 3117.90 -75.341 70 -231.81 394.28 3962.20 934.87 -24.487 80 338.54 1453.60 4390.10 1258.30 34.125 90 935.80 3168.70 4988.20 3318.90 89.714 100 1467.50 4676.20 5576.90 5125.30 133.57 110 1858.80 5897.70 6023.20 6592.50 160.65 120 2066.60 6796.80 6255.50 7681.20 169.86 130 2082.90 7380.30 6259.30 8400.20 163.37 140 1929.70 7691.50 6065.60 8798.40 145.12 150 1647.60 7797.80 5737.40 8952.50 119.52 160 1281.40 7776.40 5355.00 8950.90 90.294 170 869.45 7700.80 5002.10 8878.70 59.978 180 437.78 7630.10 4754.20 8805.30 29.811 190 0.00 7602.20 4665.00 8775.60 0.00 200 -437.78 7630.10 4754.20 8805.30 -29.811 210 -869.45 7700.80 5002.1 8878.70 -59.978 220 -1281.40 7776.40 5355.00 8950.90 -90.294 230 -1647.60 7797.80 5737.40 8952.50 -119.52 240 -1929.70 7691.50 6065.60 8798.40 -145.12 250 -2082.90 7880.30 6259.30 8400.20 -163.37 260 -2066.60 6796.80 6255.50 7681.20 -169.86 270 -1858.8 5897.70 6023.20 6592.50 -160.65 280 -1467.50 4676.20 5576.90 5125.30 -133.57 290 -935.8 3168.70 4988.20 3318.90 -89.714 300 -338.54 1453.60 4390.10 1258.30 -34.125 310 231.81 394.28 3962.20 934.87 24.487 320 683.86 2177.00 3853.60 3117.90 75.341 330 946.67 3833.30 4064.10 5143.80 108.12 340 984.35 5239.10 4446.40 6876.00 115.74 350 802.95 6305.80 4831.90 8199.60 96.437 360 448.91 6970.60 5103.80 9029.00 54.618 0.00 7196.30 5200.70 9311.40 0.00
Kesimpulan dari Tabel 4:
F maks. Pada dinding silinder = 2082.878 N F maks. Pada pena piston = 7797.752 N F maks. Pada pena engkol = 6259.274 N F maks. Pada bantalan poros
engkol = 9311.392 N Torka maksimum poros engkol = 169.865 Nm
Hasil perhitungan bila diplot pada grafik pada Gambar 19:
Torsi yang bekerja pada poros engkol diperlihatkan pada gambar 20:
Gambar 20. Grafik Torsi vs
θ
2Analisa Gaya-Gaya Goncang (Shaking Forces)
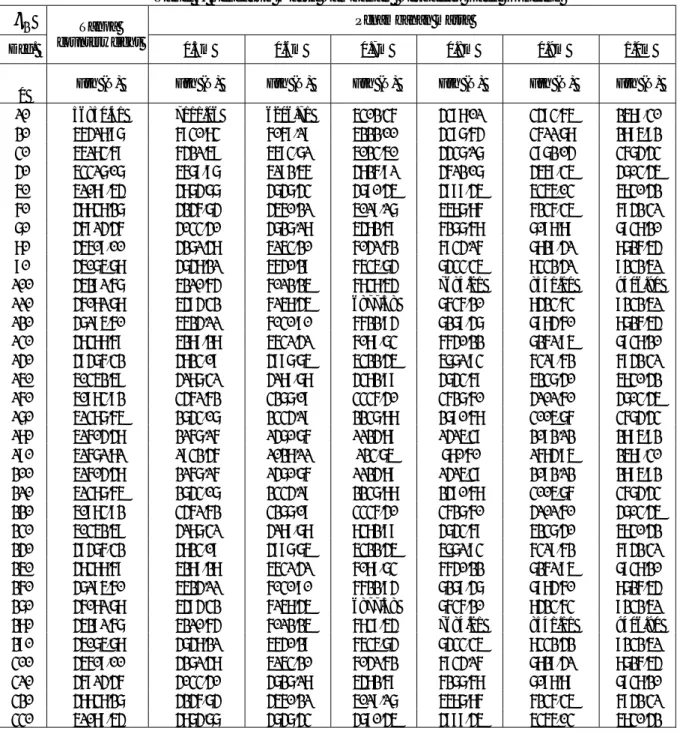
Dalam analisa ini variasi massa tambahan akan menghasilkan gaya goncang yang berbeda seperti ditabulasikan pada Tabel 5.
Tabel 5. Pengaruh Massa Tambahan Terhadap Gaya Goncang
2
θ
Tanpa counterweight Penambahan massa Deg. 0.5m 0.6m 0.7m 0.8m 0.9m 1.0m 0 Fsh (N) Fsh (N) Fsh (N) Fsh (N) Fsh (N) Fsh (N) Fsh (N) 10 56850.41 7111.06 6206.71 5302.36 4398.01 3493.65 2589.30 20 56418.97 6930.83 6069.19 5222.00 4397.64 3611.78 2895.92 30 55183.69 6421.59 5693.71 5023.50 4437.17 3972.04 3674.43 40 53317.07 5679.97 5192.56 4826.91 4612.07 4569.35 4703.45 50 51089.54 4874.77 4747.43 4790.45 4999.45 5355.03 5830.42 60 48838.27 4246.74 4560.21 5019.17 5587.86 6236.35 6942.31 70 46914.46 4033.40 4727.18 5482.69 6277.68 7098.89 7938.20 80 45609.00 4271.48 5153.20 6041.62 6934.16 7829.41 8726.54 90 45075.78 4748.21 5640.29 6535.74 7433.35 8332.41 9232.51 100 45291.67 5210.64 6012.25 6838.54 7684.21 8541.11 9406.90 110 46081.78 5494.32 6158.45 6877.58 7636.20 8423.63 9232.51 120 47195.60 5524.11 6030.90 6622.94 7279.47 7984.60 8726.54 130 48388.69 5289.28 5631.41 6089.73 6640.22 7261.95 7938.20 140 49476.32 4823.09 4997.75 5322.45 5771.93 6319.62 6942.31 150 50352.59 4187.31 4189.78 4382.99 4743.69 5237.40 5830.42 160 50983.92 3461.62 3277.09 3336.40 3627.60 4101.60 4703.45 170 51387.65 2743.07 2334.19 2237.88 2790.68 3005.76 3674.43 180 51604.48 2167.16 1470.76 1124.89 1415.39 2092.12 2895.92 190 51671.81 1932.46 1028.11 123.75 780.60 1684.95 2589.30 200 51604.48 2167.16 1470.76 1124.89 1415.39 2092.12 2895.92 210 51387.65 2743.07 2334.19 2237.88 2490.68 3005.76 3674.43 220 50983.92 3461.62 3277.09 3336.40 3627.60 4101.60 4703.45 230 50352.59 4187.31 4189.78 8382.99 4743.69 5237.40 5830.42 240 49476.32 4823.09 4997.75 5322.45 5771.93 6319.62 6942.31 250 48388.69 5289.28 5631.41 6089.73 6640.22 7261.95 7938.20 260 47195.60 5524.11 6030.90 6622.94 7279.47 7984.60 8726.54 270 46081.78 5494.32 6158.45 6877.58 7636.20 8423.63 9232.51 280 45291.67 5210.64 6012.25 6839.54 7684.21 8541.11 9406.90 290 45075.78 4748.21 5640.29 6535.74 7433.35 8332.42 9232.51 300 45609.00 4271.48 5153.20 6041.62 6934.16 7829.41 8726.54 310 46914.46 4033.40 4727.18 5482.69 6277.68 7098.89 7938.20 320 48838.27 4246.74 4560.21 5019.17 5587.86 6236.35 6942.31 330 51089.54 4874.77 4747.43 4790.45 4999.45 5355.03 5830.422
θ
Tanpa counterweight Penambahan massa Deg. 0.5m 0.6m 0.7m 0.8m 0.9m 1.0m 0 Fsh (N) Fsh (N) Fsh (N) Fsh (N) Fsh (N) Fsh (N) Fsh (N) 340 53317.07 5679.97 5192.56 4826.91 4612.07 4569.35 4703.45 350 55183.69 6421.59 5693.71 5023.50 4437.17 3972.04 3674.43 360 56418.97 6930.83 6069.19 5222.00 4397.64 3611.78 2895.92 56850.41 7111.06 6206.71 5302.36 4398.01 3493.65 2589.30F maks. tanpa bobot imbang = 56850.413 N F maks. dengan tambahan massa 0.5 Mp = 7111.061 N F maks. dengan tambahan massa 0.6 Mp = 6206.709 N F maks. dengan tambahan massa 0.7 Mp = 6877.580 N F maks. dengan tambahan massa 0.8 Mp = 7684.206 N F maks. dengan tambahan massa 0.9 Mp = 8541.107 N F maks. dengan tambahan massa 1.0 Mp = 9406.897 N
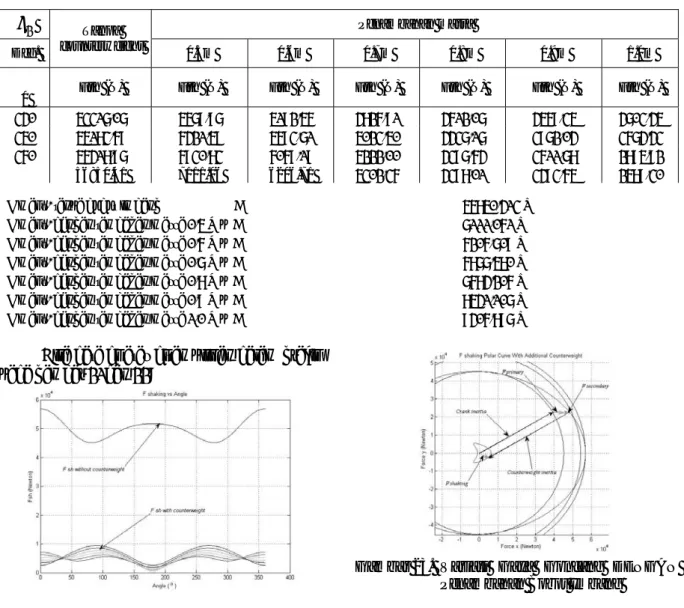
Bila data di atas ditampilkan dalam grafik pada gambar 21dan 22:
Gambar 21. Variasi Penambahan Bobot Massa Imbang Terhadap Gaya Goncang
Gambar 22. Detail Kurva Polar Variasi Gaya Goncang dengan Penambahan Bobot Imbang
Dan bila vektor gaya goncang dengan penambahan bobot massa pada penyeimbang untuk sudut engkol 30o ditampilkan dalam kurva
polar maka dapat dilihat pada Gambar 23:
Gambar 23. Variasi Gaya Goncang DENGAN Penambahan Bobot Imbang
Sedangkan besar gaya goncang yang terjadi untuk variasi penembahan bobot massa mulai dari 0,4 sampai 1,0 kali massa bergerak linear ditunjukkan pada Gambar 24:
Gambar 24. Variasi Gaya Goncang dengan Penambahan Bobot Imbang
IV. KESIMPULAN
Kesimpulan yang diperoleh pada investigasi motor bakar satu silinder pada tulisan ini:
1. Pada analisa gaya-gaya pada mekanisme motor bakar tanpa bobot imbang diperoleh gaya inersia terbesar terjadi pada poros engkol, sedangkan gaya inersia terkecil beraksi pada dinding silinder, seperti yang dapat dilihat pada tabzel 6:
Tabel 6. Besar Gaya beraksi pada pena, bantalan, dan dinding silinder tanpa bobot imbang pada poros engkol
F14 F43 F23 F12 (Cylinder Wall) (Wrist Pin) (Crank Pin) (Main Bearing) Besar (Newton) 2082,878 7797,752 6259,273 9311,392 Sudut
θ
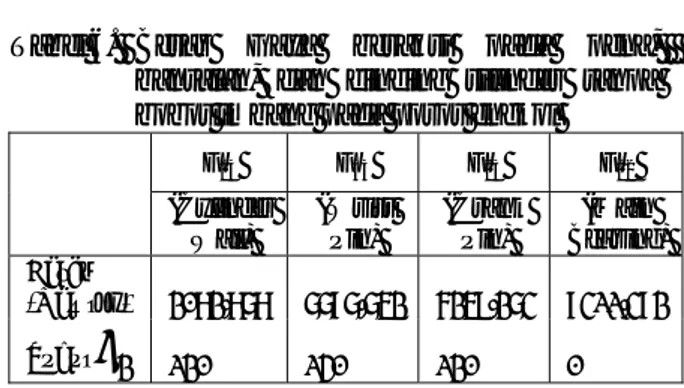
2 120 140 120 02. Dari hasil simulasi mekanisme motor bakar satu silinder dengan menggunakan MATLAB disimpulkan bahwa dengan penambahan bobot massa sebesar 0,6 kali massa yang terkonsentrasi pada piston terhadap massa penyeimbang menghasilkan gaya goncang terkecil, seperti yang tertabulasi pada tabel 7:
3. Adalah tidak mungkin untuk meniadakan gaya goncang pada motor bakar satu silinder.
Tabel 7. Persentase Pengurangan Gaya Goncang dengan Variasi Bobot Massa Tambahan Tanpa
counterweigh t
Penambahan bobot massa tambahan
0.5m 0.6m 0.7m 0.8m 0.9m 1.0m Besar Fshaking (Newton) 56850,413 7111,061 6206,709 6877,581 7684,206 8541,107 9406,897 Reduksi F sh - 87,49 % 89,08 % 87,90 % 86,48 % 84,97 % 83,45 % Sudut
θ
2(o) 0 0 0 100 90 90 90 DAFTAR PUSTAKAReinholtz, Charles, Kinematics and Dynamics of Machinery, Prentice Hall,1990
Holowenko,A.R, Kinematics and Dynamics of Machinery, Erlangga, 1993
Wilson, Charles, Kinematics and Dynamic of Machinery, Harper & Row, New York, 1983
Duane Hanselman & Bruce Littlefield, MATLAB, Prentice Hall, NewJesrey, 1997
David F. Griffiths, An Introduction to Matlab, The University Dundee, Stockholm, Sweden, 2001
Gockenbach, Mark, A Practical Introduction to Matlab, Michigan Technology University Mark’s Standard Handbook for Mechanical
Engineer, 9th ed.
Paul K. Yin, Numerical methods on Spreadsheet
for Machinnery Design Project,International journal Engineering
Ed Vol.13, No. 6, p.412-416, Great Britania,1997
Rajput,R.K,Thermal Engineering,,Laxmi Publication (P) LTD,New Delhi,2003 http://emissary.prenhall.com/esource