BAB III
ANALISA DINAMIK DAN PEMODELAN SIMULINK CONNECTING ROD
Dalam tugas akhir ini, peneliti melakukan analisa dinamik connecting rod. Geometri connecting rod sepeda motor yang dianalisis berdasarkan parameter. Selanjutnya geometri tersebut digambarkan di software solidworks. Peneliti mendapatkan referensi dari buku, jurnal, dan internet. Menggunakan referensi - referensi sebagai dasar yang dapat menunjang penelitian dan mengikuti bimbingan dan arahan dari dosen pembimbing.
Setelah proses penggambaran geometri dan perhitungan selesai, peneliti memasukkan kondisi-kondisi batas dan beban-beban dinamis yang bekerja untuk analisa yang dilakukan. Kemudian proses analisa (dalam hal ini analisa dinamik connecting rod) dijalankan dan software akan memperlihatkan hasil analisa yang sedang berlangsung. Hasil analisa dengan software yang sudah selesai kemudian di bandingkan dengan perhitungan manual dan hasil matlab. Setelah itu kita bisa membandingkan hasilnya.
Sebelum kita memulai suatu perancangan, akan lebih baik apabila kita membuat langkah pengerjaan yang akan kita lakukan terlebih dahulu. Hal ini akan mempermudah dalam melakukan suatu perancangan.
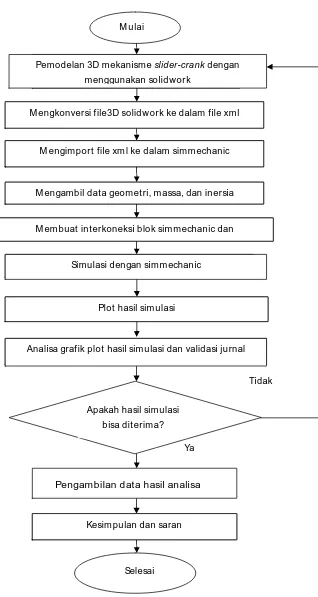
3.1 Diagram Alir Penelitian
Gambar 3.1 Diagram alir penelitian. M engkonversi file3D solidwork ke dalam file xm l
M engimport file xm l ke dalam sim m echanic
M em buat interkoneksi blok sim m echanic dan
Simulasi dengan sim m echanic Simulasi dengan sim m echanic
Plot hasil sim ulasi
Analisa grafik plot hasil sim ulasi dan validasi jurnal M engambil data geom et ri, m assa, dan inersia
Kesim pulan dan saran
Selesai
Ya
Tidak Pemodelan 3D m ekanism e slider-crank dengan
m enggunakan solidwork
Pengam bilan data hasil analisa
3.2 Analisa Kinematika dan Kinetika Connecting Rod
Saat mekanisme slider crank bekerja dengan kecepatan tinggi, komponen didalamnya akan mengalami deformasi. Deformasi plastis pada komponen-komponen tersebut dapat mengakibatkan kegagalan atau kerusakan saat mekanisme slider crank bekerja. Maka pada penelitian ini, analisa dilakukan dengan mengasumsikan crankshaft, connecting rod, dan piston sebagai benda tegar. Benda tegar (rigid body) adalah kondisi
dimana deformasi yang terjadi pada komponen-komponen mekanisme slider crank diabaikan.
Rigid body atau benda tegar adalah kondisi dimana deformasi yang terjadi pada
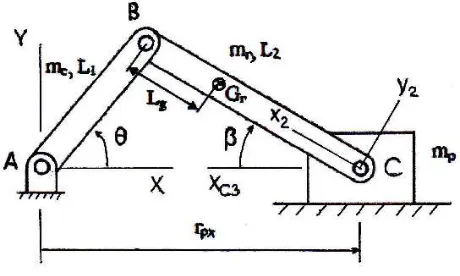
komponen-komponen mekanisme slider crank diabaikan. Analisa connecting rod pada mekanisme single-cylinder secara analitik, di analisa dengan Gambar 3.2 merupakan gambar sederhana dari sebuah mekanisme slider crank.
Gambar 3.2 Mekanisme slider crank.
3.2.1 Kinematika Connecting Rod
Kinematika connecting rod dipengaruhi oleh gerak rotasi crankshaft pada bagian big end connecting rod dan gerak translasi yang dihasilkan piston pada bagian small end.
Gambar 3.4, menunjukkan hubungan antara 3 komponen slider crank tersebut. Dimana L1 dan L2 adalah panjang crankshaft dan connecting rod, Lg merupakan jarak pusat massa connecting rod (Gr) dari big end. Kemudian , , dan secara berturut-turut adalah massa crankshaft, massa connecting rod, dan massa piston.
Saat piston bergerak membentuk jarak terhadap pusat crankshaft, maka akan terbentuk sudut θ, yaitu sudut antara crankshaft dan bidang horizontalnya di titik A dan sudut β, yaitu sudut antara connecting rod dan bidang horizontalnya di titik C.
Sudut connecting rod, dihubungkan ke adalah :
sinβ= (3.4)
= (3.5)
Kecepatan angular dan percepatan angular di turunkan terhadap waktu :
= (3.13)
Percepatan connecting rod, dihitung dari deferensial persamaan 3.13 bergerak terhadap waktu untuk dan dari persamaan 3.1 dan 3.2.
= + (3.17)
Pusat massa connecting rod di A, arah X dan Y kemudian terbentuk persamaan :
= + (3.18)
= − (3.19)
Substitusi untuk persamaan Sin( ) dan Cos ( ) dari persamaan (3.3) dan (3.11) ke persamaan (3.18) dan (3.19) :
= + 1− (3.20)
Kecepatan linier pusat massa connecting rod , arah X dan Y dideferensialkan ke persamaan (3.20) dan (3.21) terhadap waktu :
= differensial persamaan 8 (3.22)
= − − (3.23)
= differensial persamaan 9 (3.24)
= − (3.25)
=lokasi piston
(3.29)
= + 1− (3.30)
= kecepatan linier piston arah x (adalah defferensial dari)
= (3.31)
( )
= − (3.32)
= − − (3.33)
= percepatan linier piston arah x (adalah deffrensial dari)
=
3.2.2 Kinetika Connecting Rod
Analisa kinetika connecting rod dimulai dari memperhitungkan gaya yang bekerja pada piston. Hal ini dikarenakan mekanisme slider-crank dimulai dengan bertranslasinya piston. Selain itu, dipengaruhi pula oleh tekanan yang terjadi pada ruang bakar. Untuk gaya gesek piston terhadap silinder dapat diabaikan.
Pada gambar 3.3 adalah gambar dimana piston bergerak searah dengan sumbu x, maka dapat di gambarkan kedalam diagram benda bebas seperti gambar dibawah ini gambar 3.3.
Gambar 3.3 Diagram benda bebas piston.
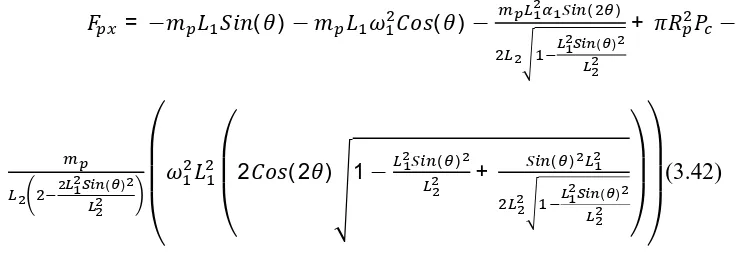
Gambar 3.3 piston bergerak searah dengan sumbu x, sehingga gaya yang bekerja pada piston adalah
Dimana adalah massa gabungan antara piston, pin piston, dan piston ring dan adalah jari-jari piston.
Kemudian subtitusi persamaan 3.38 ( ) ke dalam persamaan 3.39 ( ), didapatkan gaya piston arah x, yaitu
=
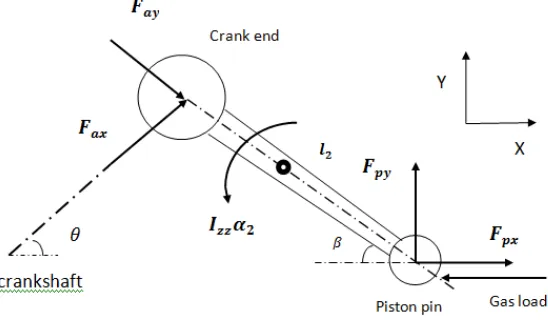
Secara keseluruhan gaya yang bekerja pada connecting rod dapat digambarkan sebagai berikut liat gambar 3.4 di bawah ini.
Gambar 3.4 Diagram benda bebas gaya connecting rod.
Dimana dan adalah gaya yang terjadi pada small end connecting rod pada sumbu x. merupakan momen inersia pada pusat massa, dan merupakan gaya yang bekerja pada sambungan antara connecting rod dan crankshaft. Sehingga dan dapat ditulis
menjadi :
= + (3.44)
= ( ) ( )
dan merupakan gaya yang digambarkan pada system koordinat secara umum, dimana system koordinat ini tidak berputar dengan crankshaft. Sedangkan gaya yang system koordinatnya terletak pada crankshaft dapat ditulis menjadi :
= cos − sin (3.46)
= cos + sin (3.47)
3.2.3 Torsi Saat Mekanisme Bekerja
Torsi dihasilkan dari hasil langkah kerja ruang bakar. Oleh karena itu untuk mengetahui torsi dari hasil kerja mekanisme slider crank, diperlukan perhitungan kinematika dan kinetika pada sebuah komponen mekanisme slider crank. Torsi mekanisme slider crank dapat diketahui dengan menentukan gaya yang bekerja pada sambungan crankshaft dan connecting rod, seperti pada persamaan (3.48).
Dimana dan merupakan gaya hasil kerja dari piston yang dihubungkan oleh connecting rod. Gaya dan akan memutar balik crankshaft dengan kecepatan tertentu, tergantung jarak gaya tersebut dengan pusat rotasinya. Gambar 3.5 adalah arah torsi yang dihasilkan dari gaya dan .
Maka torsi saat mekanisme slider crank bekerja adalah :
= (3.48)
Torsi yang dimaksud disini adalah torsi keseluruan dari hasil kerja makanisme slider crank. Persamaan (3.48) merupakan persamaan untuk menghitung torsi pada slider
crank single cylinder.
3.3 Pemodelan Geometri Connecting Rod dengan Solidwork
Pemodelan geometri connecting rod dilakukan dengan memodelkan mekanisme slider crank single-cylinder in-line menjadi model 3D berdasarkan data geometri aslinya. Dari gambar 3D tersebut akan dikonversikan kedalam file simmechanic. Kemudian melakukan pemodelan simulasi pada simmechanic 3.0. Untuk pemodelan geometri connecting rod dengan solidwork dapat dilihat pada gambar 3.6 di bawah ini. Data
geometri komponen-komponen tersebut dapat dilihat pada lampiran B.
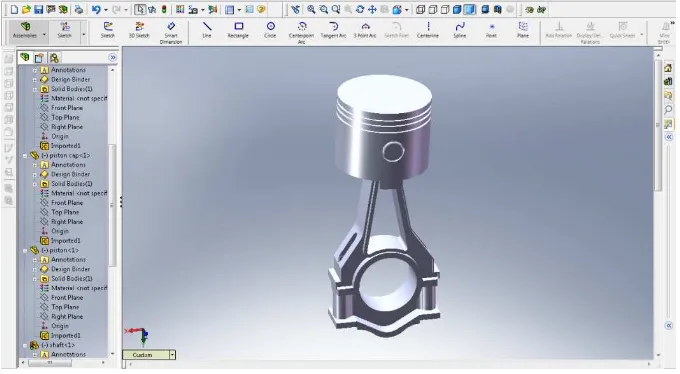
Gambar 3.7 Model 3D solidwork connecting rod dan piston.
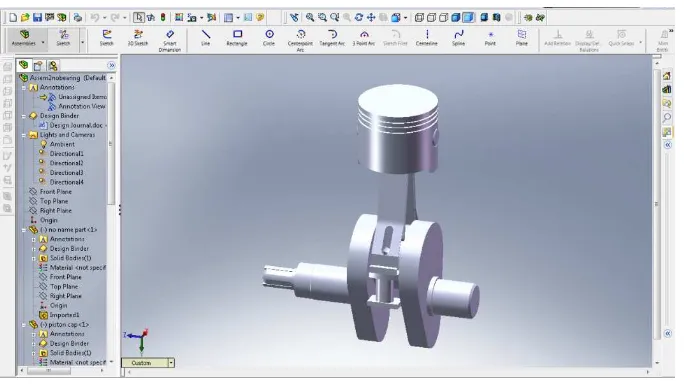
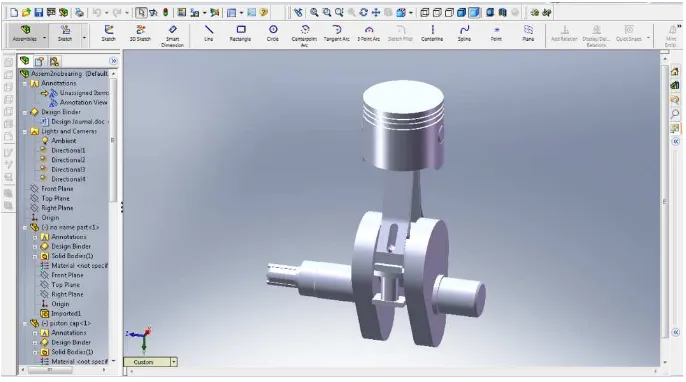
Gambar 3.9 Solidwork assembly crankshaft, connecting cod, dan piston.
Assembly crankshaft, connecting rod, dan piston pada gambar 3.9
Table 3.1 Properti Baja AISI 4340
No Sifat Material Nilai Satuan
1 Modulus Elastisitas 1.32258e+008 N/m^2
2 Rasio Poisson 0.32
3 Shear Modulus 5.16128e+007 N/m^2
4 Koefisien Thermal Expansion 1.23e-005
5 Massa Jenis 0.283599 lb/in^3
6 Konduktivitas Termal 44.5 W/m.K
7 Kalor Jenis 475 J/kg.K
8 Tensile Strength 716128 N/in^2
9 Yield Strength 458064 N/in^2
3.4 Pemodelan dengan Simmechanic
Setelah mengambar connecting rod dengan bantuan software solidwork kemudian diimport ke dalam file iges setelah itu di konversi kedalam simmechanic dalam bentuk file xml. Penelitian ini seluruh system connecting rod dimodelkan menggunakan Matlab/ Simulink. Seluruh pemodelan dibangun dari interkoneksi blok yang mewakili
perhitungan matematis dari system connecting rod.
3.4.1 Import Model 3D ke dalam Simmechanic
Model 3D connecting rod, crankshaft, dan piston tidak dapat dikonversikan kedalam file .xml secara keseluruan. Oleh karena itu model 3D komponen-komponen penelitian ini, dikonversikan secara terpisah. Dikelompokkan menjadi beberapa bagian dan disimulasikan kedalam Simmechanic dengan penyerdahaan simulasi. Penyederhanaan simulasi dilakukan dengan hanya mengambil data-data yang penting yang ada pada komponen-komponen tersebut yang nantinya diperlukan untuk simulasi.
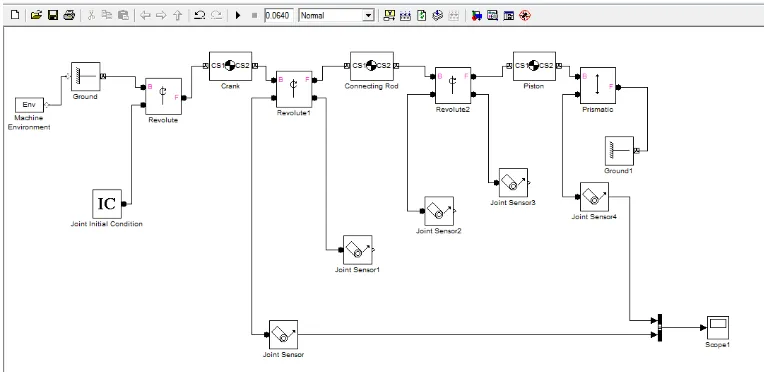
Gambar 3.10 memperlihatkan model dinamika connecting rod, crankshaft, dan piston secara keseluruan. Dinamika ini merepresentasikan kondisi fisis pada connecting rod, crankshaft, dan piston yang menghasilkan state berupa sudut, kecepatan angular,
percepatan angular, torsi, dan gaya. Dinamika actuator dimodelkan dengan direpresentasikan dengan blok scope. Representasi dari kestabilan connecting rod, crankshaft, dan piston pada posisi variasi kecepatan 2000 rpm, 3000 rpm, 4000 rpm, dan
5700 rpm.
Gambar 3.11 Rangkaian blok-blok hasil konversi solidwork kedalam simmechanic variasi kecepatan 3000 rpm.
Gambar 3.13 Rangkaian blok-blok hasil konversi solidwork kedalam simmechanic variasi kecepatan 5700 rpm.
3.4.2 Parameter-parameter blok dalam Simmechanic
Blok pada Simulink merupakan elemen yang digunakan untuk memodelkan secara virtual hampir semua sistem dinamis dengan menghubungkannya secara tepat. Pada Simmechanic, pemodelan blok mewakili parameter body, joint, contrains, dan elemen gaya.
Simmechanic memformulasikan dan menyelesaikan persamaan geraknya sesuai model blok
yang dibuat. Gambar 3.14 menunjukkan blok body, joint, dan sensor.
Pada penelitian tugas akhir ini, blok Simmechanic yang digunakan terdiri dari 3 kelompok yaitu :
1. Machine, body, dan ground
Body adalah blok yang mewakili model benda tegar dimana parameter dapat diatur dan disesuaikan. Komponen-komponen pada penelitian ini, yang dimodelkan menjadi blok body adalah crankshaft, connecting rod, dan piston. Gambar 3.22 adalah salah satu contoh parameter yang ada didalam blok body yang mewakili connecting rod.
Gambar 3.15 Parameter blok connecting Rod.
Parameter yang digunakan pada blok ini adalah geometri, massa, dan inersia dari connecting rod. Geometri digunakan untuk mengisi kolom position pada bagian origin
position vector [x, y, z]. Port side, adalah letak titik penghubung antar blok. CG (Center of
Gravity) adalah parameter yang mewakili letak pusat massa dari connecting rod. CS1 dan
Pada penelitian ini, model Simmechanic dibuat disepanjang sumbu y. titik awal dari model blok ini adalah (0,0,0). CG dari connecting rod diasumsikan berada ditengah. Sedangkan CS 2, 3, 4, dan 5 merupakan ujung dari connecting rod single-cylinder.
Blok machine yang digunakan pada penelitian ini adalah machine environment, seperti gambar 3.17. Blok ini digunakan untuk mengatur lingkungan mekanis pada mechanism slider crank. Parameter didalamnya tidak diubah. Blok ground, seperti gambar
3.16, digunakan sebagai titik referensi tetap pada mesin. Dikarenakan titik awalnya adalah (0,0,0) maka parameter blok ini diisi sesuai CS1.
Gambar 3.17 Parameter blok mechine environment.
2. Joint ( Sambungan )
Joint adalah blok yang memodelkan pergerakan benda dan derajat kebebasannya.
Pada penelitian tugas akhir ini menggunakan 2 jenis blok joint yaitu Revolute Joint dan Prismatic Joint, dengan masing-masing 1 derajat kebebasan. Gambar 3.18 dan 3.19
menunjukkan parameter kedua joint tersebut.
Revolute joint adalah parameter yang mewakilkan gerak rotasi. Parameter yang
penting adalah axis of action [x y z]. Blok body crankshaft akan berotasi pada sumbu y arah z, maka pada axis of action, nilai z adalah 1.ditunjukkan pada gambar 3.18.
Prismatic joint adalah blok parameter yang mewakilkan gerak translasi.
bertranslasi pada arah x, maka pada axis of action, nilai x adalah 1. Ditunjukkan pada gambar 3.19.
Gambar 3.19 Parameter blok prismatic.
3. Sensor
Sensor adalah alat penunjang untuk mengukur sinyal hasil simulasi. Pada penelitian ini, menggunakan 3 jenis alat penunjang, yaitu joint initial condition, sensor joint dan scope. Parameter ditunjukkan pada gambar 3.20, 3.21, dan 3.22.
Join initial condition (IC) adalah alat penunjang yang merupakan bagian dari
Sensor and Actuator untuk memberikan posisi dan kecepatan mesin pada penelitian tugas
akhir ini. Ditunjukkan pada gambar 3.20.
Scope adalah alat penunjang untuk memvisualisasikan sinyal hasil simulasi.
Ordinat hasil plot dari scope tergantung pada pemilihan sinyal pada joint sensor. Axis dari scope adalah parameter waktu yang dapat disesuaikan kebutuhan, ditunjukkan pada gambar
Gambar 3.20 Parameter blok joint initial condition.
Gambar 3.22 Scope.
3.4.3 Parameter Simulasi Simmechanic
Penelitian tugas akhir ini menggunakan satu buah silinder atau single-cylinder. Berikut ini adalah parameter batas yang dibutuhkan untuk mendapatkan hasil sinyal simulasi.
1. Variasi kecepatan putaran mesin adalah 2000 rpm (kecepatan putaran rendah), 3000 rpm dan 4000 rpm (kecepatan putaran menengah), 5700 rpm (kecepatan putaran tinggi).
2. Sudut yang ditempuh dalam dua putaran penuh tiap variasi kecepatan putaran mesin adalah 720 . Yaitu satu siklus kerja 4 langkah, jadi ada perubahan lamanya waktu simulasi.
3. Parameter joint sensor yang digunakan adalah kecepatan angular, percepatan angular, gaya (reaction force), torsi (reaction torque), dan sudut.
5. Pengukuran sinyal hasil diasumsikan saat mesin bekerja, bukan saat mesin awal dinyalakan.
Gambar 3.23 menunjukkan simulasi dengan menggunakan Simmechanic dimana visualisasi 3D hanya tampak pada piston.