Dimensinya Menggunakan Echosounder Multibeam di Perairan Bengkulu. Dibimbing Oleh HENRY MUNANDAR MANIK dan DJOKO HARTOYO.
Informasi batimetri tidak hanya derguna untuk menggambarkan topografi dasar laut. Data batimetri juga dapat digunakan untuk menduga keberadaan suatu gunung bawah laut disuatu perairan. Keberadaan gunung bawah laut sangat penting untuk diketahui, hal ini bertujuan untuk mengantisipasi daerah yang berpotensi terhadap bencana meletusnya gunung api maupun bidang lainnya.
Penelitian ini dilakukan selama 5 bulan, yaitu pada bulan Maret-Juli 2012. Tujuan
penelitian ini untuk menduga keberadaan gunung bawah laut (seamount) dan melakukan
pengukuran terhadap dimensi seperti tinggi, diameter, dan jumlah puncak. Instrumen
akustik yang digunakan terdiri dari 2 yaitu: ELAC SeaBeam 1050D dengan frekuansi 50 kHz dan Simrad EM 12D dengan frekuensi 12 kHz. Survei batimetri dilakukan di perairan barat daya Pulau Sumatera, tepatnya di provinsi Bengkulu pada tanggal 18-19 Desember 2010. Akuisisi data dilakukan menggunakan perangkat lunak Hydrostar yang terdapat dalam Kapal Baruna Jaya 3 dan Kapal Baruna Jaya 4. Perangkat lunak (software) yang digunakan untuk mengolah data kedalaman adalah CARIS HIPS and SIPS 6.1. Data amplitudo dan backscatter
dari hasil kegiatan pemeruman diperoleh melalui pemrosesan data mentah pada MBSystem. Tampilan 3 dimensi gunung bawah laut diperoleh melalui perangkat lunak Fledermaus 6.2. Gunung bawah laut diasumsikan sebagai suatu objek yang bebrbentuk kerucut dengan alas elips untuk melakukan perhitungan terhadap dimensinya.
Hasil penelitian ini memberikan informasi mengenai keberadaan suatu objek yang diduga kuat sebagai gunung bawah laut (seamount) yang berjarak 320 Kilometer arah barat daya kota Bengkulu, tepatnya pada koordinat 4022’9,16’’ LS dan 990 25’ 01,47’’ BT. Tinggi gunung bawah laut ± 3.968 meter serta memiliki dua puncak yang dipisahkan oleh celah yang disebut kaldera pada jarak ± 3.050 meter. Puncak gunung berada pada kedalaman ± 1.270 meter. Diameter panjang
(major axis) gunung tersebut ± 50.240 meter dan diameter pendek (minor axis)
berdasarkan hasil pengukuran dari gunung tersebut yaitu ± 5.644 meter.
Multibeam Echosounder in Bengkulu’s Seas
SUPERVISED BY HENRY MANIK AND DJOKO HARTOYO
The research Detection of the Seamount Existence and Measuring
Dimensions by Using Multibeam Echosounder in Bengkulu’s Seas was conducted during 5 months from Maret until July 2012. The aim from this research is to guess the existence of seamount and measuring dimension such as height,
diameters, and number of peaks. There are two acoustic instruments used in this research, consisted of : ELAC Seabeam 1050D with a frequency of 50 kHz and Simrad EM 12D with a frequency of 12 kHz. Bathymetric survey conducted in southwest Sumatera island on 18-19 December 2010. Data acquisition was obtained by using the hydrostar software in Baruna Jaya III and Baruna Jaya IV vessel. CARIS HIPS and SIPS 6.1 used to get data of bathymetry. Amplitude and backscatter data obtained by processing on the MB System. Visualization of data is performed by using the Fladermaus 6.2 software thus obtained in 3D.
Seamount is assumed as a cone with an elliptical base to calculate the dimensions.
The result from this research is existence of an object that is allegedly as a seamount at 320 Kilometers from the southwest of Bengkulu city, precisely at 4022’9,16’’ southern latitude and 990 25’ 01,47’’ east longitude. The seamount height is ± 3.968 meters and has two peak separated by a gap called a caldera at ± 3.050 meters. The major axis is ± 50.240 meters and the minor axis in this seamount is ± 5.644 meters. Seamount peaks located at ± 1.270 meters below sea level. Based on the opinion of some geologists, the seamount is expressed as an inactive volcano
1
1. PENDAHULUAN
1.1Latar Belakang
Fenomena alam yang terjadi di muka bumi bersifat dinamis dan terjadi dalam kurun waktu yang sangat lama, mengakibatkan adanya perubahan bentuk muka bumi. Perubahan itu tidak hanya terjadi di darat, melainkan juga terjadi di lingkungan laut. Salah satu kajian dari perubahan struktur bumi yang terjadi di lingkungan laut yaitu mengenai perubahan kedalaman suatu perairan (batimetri).
Kajian batimetri yang telah disebutkan sebelumnya dapat dijadikan acuan dalam penentuan morfologi dasar laut yang kemudian dari informasi tersebut diharapkan mampu menghasilkan informasi tambahan mengenai keberadaan gunung bawah laut (seamount) yang ada di suatu perairan khususnya di wilayah barat Pulau Sumatera. Posisi kawasan Indonesia yang terletak pada 3 jalur tektonik atau biasa disebut lempeng lithospheric yaitu lempeng Eurasia, lempeng Indo-Australia, dan lempeng Pasifik, memberikan pengaruh yang besar terhadap bentukan roman dan morfologi dasar laut. Keberadaan gunung pada umumnya sering dijumpai di daratan, namun kemajuan teknologi dan eksplorasi dasar laut yang semakin berkembang berhasil mengungkapkan bahwa gunung juga dapat ditemukan di lingkungan laut.
2
hal ini terlihat dari adanya aktivitas vulkanik berupa timbulnya gelembung-gelembung panas. Kegiatan serupa juga dilakukan atas kerjasama Badan Pengkajian dan Penerapan Teknologi (BPPT), Lembaga Ilmu Pengetahuan Indonesia (LIPI), Departemen Energi dan Sumber Daya Mineral, CGGVeritas dan
Institut de Physique du Globe (IPG) Paris dengan menggunakan kapal seismik Geowave Champion milik CGGVeritas di perairan barat daya Pulau Sumatera pada tahun 2010. Tujuan dari diadakannya survei yaitu untuk mengetahui struktur geologi lau dalam di perairan Sumatera. Berdasarkan informasi yang diperoleh dari tim riset, telah ditemukan sebuah gunung besar yang diduga sebuah gunung bawah laut. Penemuan ini menjadi kajian yang sangat menarik untuk dibahas dalam bidang kepentingan penelitian maupun wisata. Keberadaan gunung bawah laut (seamount) khususnya gunung bawah laut yang besar (giant volcano) sangat erat kaitannya dengan aktifitas lempeng yang ada di Indonesia.
1.2Tujuan
Tujuan dari penelitian ini untuk menduga keberadaan gunung bawah laut
3
2. TINJAUAN PUSTAKA
2.1 Ketentuan International Hydrographic Organisation (IHO) Standards
For Hydrographic Survei (S.44-IHO)
Informasi mengenai kondisi dasar laut dapat diperoleh melalui sebuah kegiatan yang disebut survei batimetri. Kajian untuk mengetahui keberadaan gunung bawah laut (seamount) dititikberatkan pada perolehan data batimetri suatu perairan. Kegiatan pemeruman (sounding) memungkinkan untuk mengetahui kedalaman laut. Kegiatan pemeruman hanya dilakukan di beberapa titik saja sesuai dengan objek yang ingin diperoleh. Batimetri adalah ukuran tinggi rendahnya dasar laut yang merupakan sumber informasi utama mengenai dasar laut (Ariana, 2002).
Publikasi khusus yang dilakukan oleh International Hydrography Organization melalui IHO Standars For Hydrographic Surveys edisi ke-4 tahun 1998 manyatakan bahwa dalam melakukan survei batimetri dibagi menjadi beberapa orde yang berbeda sesuai dengan pembagian kawasan lokasi survei dilakukan. Publikasi ini juga digunakan sebagai acuan untuk melakukan survei berdasarkan standar internasional. Ketentuan ini dibuat untuk memberlakukan spesifikasi minimum yang harus dipenuhi dalam pengumpulan data-data yang tepat untuk keselamatan navigasi para pelaut (Gumbira, 2011).
2.2 Klasifikasi Survei
Berdasarkan publikasi khusus IHO tahun 1998 terdapat beberapa
4
2.2.1 Orde Khusus
Orde ini diperuntukkan bagi wilayah-wilayah kritis dan miliki
karakteristik dasar perairan yang mampu membahayakan kapal. Daerah kritis tersebut ditentukan langsung oleh instansi yang bertanggung jawab dalam
pelaksanaan survei batimetri. Contoh kawasan yang termasuk kedalam klasifikasi orde khusus ini adalah pelabuhan-pelabuhan tempat sandar kapal dan alur
masuknya kapal. Semua kesalahan harus dibuat seminimal mungkin untuk menghasilkan image dasar perairan dengan resolusi yang tinggi. Kegiatan survei hidrografi pada orde ini dilakukan dengan jarak antar lajur perum yang rapat. Hal yang harus diperhatikan juga pada orde ini adalah setiap benda dengan ukuran lebih besar dari satu meter persegi dapat terlihat oleh peralatan perum yang digunakan.
2.2.2 Orde Satu
Survei hidrografi yang termasuk kedalam orde ini diperuntukkan bagi pelabuhan-pelabuhan, haluan pendekat yang dianjurkan, alur navigasi dan beberapa pantai dengan lalu lintas komersial yang padat dengan kedalaman dibawah lunas kapal cukup memadai dan kondisi dasar perairan tidak membahayakan kapal. Survei orde satu berlaku di daerah yang memiliki
5
2.2.3 Orde Dua
Orde ini diperuntukkan bagi daerah-daerah yang memiliki kedalaman perairan kurang dari 200 meter. Daerah ini diperkirakan memiliki batimetri yang karakteristiknya tidak membahyakan kapal dalam pelaksanaan survei hidrografi.
2.2.4 Orde Tiga
Klasifikasi ini diperuntukkan bagi semua area yang tidak termasuk kedalam kategori orde khusus, orde satu maupun orde dua. Survei hidrografi termasuk kedalam orde ini jika kedalaman perairan atau batimetri lebih dari 200 meter.
Tabel 1. Standar minimum pelaksanaan survei hidrografi
Sumber : International Hydrographic Organization, 1998. IHO Standards for Hydrographic Surveys, Special Publication No. 44, 4th Edition
6
sangat diperlukan untuk tujuan validasi data yang dihasilkan. Perhitungan limit
error ini didasarkan pada nilai a dan nilai b yang terdapat pada tabel standar minimum survei hidrografi di atas.
2.3 Prinsip Kerja Multibeam
Multibeam merupakan instrumen hidroakustik yang banyak digunakan dalam survei batimetri. Hal ini disebabkan kemampuan instrumen tersebut dalam melakukan pemeruman dasar laut dengan akurasi yang sangat tinggi dan cakupan yang luas (Anderson et al., 2008). Multibeam mengirimkan pulsa suara dalam jumlah yang banyak ke dasar perairan, hal ini memungkinkan untuk dapat dilakukan pemetaan dasar laut secara luas. Prinsip kerja pada instrumen akustik ini pada umumnya sama dengan single beam, yaitu dengan mengukur perbedaan waktu yang dipancarkan dan diterima kembali oleh receiver. Menurut Intelmann
et al., tahun 2004menjelaskan bahwa pemrosesan data multibeam relatif lebih rumit bila dibandingkan dengan gelombang suara single beam. Untuk
kepentingan data geologi dasar perairan, diperlukan adanya kompensasi sudut datang dari masing-masing beam yang dipancarkan oleh transducer. Langkah yang harus dilakukan dalam pemrosesan data hambur balik (backscatter) yaitu melalui sebuah algoritma.
7
mengindikasikan material dasar perairan yang tingkat kekasarannya (roughness) tinggi.
Gambar 1. Prinsip pengukuran backscattering menggunakan
multibeam (Kågesten, 2008)
Beberapa dekade terakhir ini terjadi perkembangan pemetaan dasar perairan melalui metode akustik. Perkembangan akustik kelautan dimulai pada tahun 1912. Akustik digunakan untuk mendeteksi keberadaan gunung es yang menyebabkan kecelakaan kapal Titanic yang dilakukan oleh Alexander Behm. Pada awal tahun 1950, teknik penggunaan multibeam dikembangkan oleh tentara Amerika yang menggunakan lebih dari satu pulsa suara yang dipancarkan pada saat yang bersamaan. Perkembangan multibeam berkembang dengan cepat pada tahun 80 hingga 90an (Furgo Palagos, 2003). Keuntungan dari sistem ini
memiliki kemampuan penentuan posisi yang akurat dan membantu untuk menghasilkan peta batimetri dengan resolusi spasial yang tinggi. Gambar 2 di bawah ini menjelaskan bentuk sapuan dari multibeam yang dipancarkan oleh
transducer ke dalam kolom perairan ketika melakukan kegiatan pemeruman
8
Gambar 2. Visualisasi sapuan multibeam
(L-3 Communication ELAC Nautic GmbH, 2003)
2.4 ELAC SeaBeam 1050D
Multibeam ELAC SeaBeam 1050D merupakan jenis instrumen akustik yang dapat digunakan pada kedalaman laut medium, yaitu laut dengan kedalaman mencapai 3000 meter. Multibeam jenis ini memiliki kemampuan untuk
9 (a)
(b)
Gambar 3. Jangkauan sapuan ELAC SeaBeam 1050D terhadap kedalaman perairan (a) dengan frekuansi 50 kHz dan (b) dengan Frekuensi 180 kHz (L3 Communications SEA BEAM 1050D-Multibeam
Sonar, 2003)
2.5 Simrad EM 12D
Simrad EM 12D merupakan sebuah instrumen akustik yang mampu
10
ketentuan standarisasi berdasarkan ketetapan terbaru yang dibuat oleh
International Hydrography Organisatioan (IHO). Jumlah beam per ping pada instrumen ini terdiri dari 162 beam. Simrad EM 12D mampu melakukan pemeruman hingga kedalaman 10.000 meter. Tingkat resolusi yang diberikan oleh instrumen ini sangat tinggi sehingga akan memberikan gambaran objek yang detail dengan kualitas data yang baik. Resolusi kedalaman yang diberikan oleh Simrad EM 12D yaitu 1 meter. Sedangkan akurasi kedalaman dari alat ini mencapai 5 cm Root Means Square (RMS).
Multibeam saat ini menjadi teknologi yang paling penting dalam pemetaan dasar perairan. Instrumen ini terdiri dari sinyal yang dipancarkan ke dasar perairan dan menganalisis pantulan dari sinyal tersebut dalam bentuk data kedalaman dan gambaran dasar perairan.
Gambar 4. Konfigurasi linear transducer dan pola beam yang dihasilkan dari sistem multibeam (RØnhovde et al., 1999)
2.6 Kalibrasi Multibeam
11
oleh adanya pergerakan masa air laut atau dinamika laut. Tahapan ini dilakukan untuk mengurangi besarnya kesalahan (error) yang akan terjadi selama
perekaman data. Selain itu juga proses kalibrasi ini akan menentukan kualitas data yang akan dihasilkan. Proses kalibrasi yang dilakukan terdiri dari kalibrasi
offset static, pitch, roll, time delay, cepat rambat gelombang suara (sound speed) dan uji keseimbangan kapal (Mann dan Godin, 1996).
2.6.1 Kalibrasi OffsetStatic
Kalibrasi ini bertujuan untuk melakukan penyesuaian jarak dari sensor yang digunakan terhadap centerline dari kapal dan transducer. Godin (1998)
menyatakan bahwa offset statik diukur dari titik referensi yang digunakan pada koordinat transformasi pengukuran kedalaman. Contoh pengukuran offset statik dapat dilihat pada gambar 5. Proses kalibrasi ini memerlukan beberapa komponen, yaitu kapal, antena GPS kapal, transducer, dan kompas gyro
Gambar 5. Kalibrasi offsetstatic (Godin, 1998)
Beberapa tahapan koreksi yang dilakukan seperti pitch, roll, time delay
12
2.6.2 Kalibrasi Pitch
Tujuan dari kalibrasi ini adalah untuk mencari nilai koefisien pitch. Pitch dapat didefinisikan sebagai pengaruh pergerakan kapal selama melakukan kegiatan sounding terhadap sumbu-Y. Kalibrasi ini perlu dilakukan agar hasil pengukuran kedalaman menjadi akurat. Teknis pelaksanaan dari kalibrasi pitch
ini dilakukan dengan membuat garis sapuan dari multibeam yang memiliki kemiringan (slope) tertentu. Pengambilan data ini dilakukan sebanyak dua kali secara bolak-balik dengan kecepatan yang sama. Setelah itu pengambilan data yang kedua dilakukan dengan menggunakan setengah dari nilai kecepatan pertama dan kedua. Pada kedua garis ini dibuat suatu koridor untuk mendapatkan nilai koefisien pitch (Kongsberg, 2003).
Pitch memberikan pengaruh yang relatif kecil terhadap error yang ditimbulkan pada pemeruman (Godin, 1998). Ilustrasi mengenai koreksi terhadap pitch ketika melaksanakan survei hidrografi dapat dilihat pada gambar 6. Error yang ditimbulkan akibat kedalaman dan posisi akan lebih terlihat ketika jalur survei tegak lurus terhadap kemiringan perairan (slope) dan meningkat dengan bertambahnya kedalaman. Hal penting dari kalibrasi pitch yaitu pergantian jalur sepanjang sumbu-Y sebanding dengan kedalaman (Sasmita, 2008). Kalibrasi ini dapat ditulis secara matematis melalui sebuah persamaan yang dapat diformulasikan sebagai berikut :
13
Gambar 6. Kalibrasi pitch (Mann, 1996)
2.6.3 Kalibrasi Roll
Tujuan utama dari kalibrasi ini yaitu untuk mencari besarnya nilai koefisien roll sehingga kedalaman yang terukur menjadi akurat. Kalibrasi ini dilakukan dengan cara membuat satu garis sapuan dari beam pada daerah dasar perairan yang relatif datar. Teknis pelaksanaan kalibrasi ini yaitu dengan melakukan pengambilan data kedalaman sebanyak dua kali secara bolak-balik dengan kecepatan yang sama (Gambar 7). Pada daerah ini dibuat satu koridor untuk memperoleh nilai koefisiennya.
14
Penentuan kalibrasi roll ini dapat diformulasikan secara matematis melalui persamaan :
2.6.4 Kalibrasi Time Delay
Dalam pelaksanaan survei batimeri menggunakan multibeam, pulsa suara yang dipancarkan dan mengenai dasar perairan akan dipantulkan kembali. Setiap
beam yang berasal dari transducer memiliki satu nilai kedalaman. Data tersebut harus disesuaikan terhadap data posisi yang berasal dari DGPS. Tidak semua data hasil pemeruman (sounding) digunakan. Data multibeam yang digunakan adalah data yang berasal dari hasil filterisasi yang telah mengalami penyesuaian terhadap data posisi. Berdasarkan. Kalibrasi time delay atau yang lebih dikenal dengan kalibrasi waktu tunggu pada umumnya bernilai 0,2 sekon – 1 sekon. Perbedaan waktu pada koreksi ini akan menyebabkan kesalahan kalibrasi roll
(Sasmita, 2008). Kalibrasi waktu tunggu ini bernilai akurat jika dapat dideteksi dalam 10-50 ms. Gambar 8 memperlihatkan kalibrasi dari waktu tunggu akibat adanya pengaruh kecepatan kapal dan slope. Kalibrasi ini dilakukan secara berulang-ulang sehingga diperoleh profil dengan perolehan perbedaan data yang minimum. Teknis pelaksaan kalibrasi ini dengan malintasi lajur yang sam pada
15
Gambar 8. Kalibrasi time delay (Mann,1996)
Formulasi yang dapat digunakan untuk melakukan perhitungan kalibrasi
time delay adalah :
TD =
d
a ... (3) Vh - VtKeterangan :
TD = Time Delay (s)
da = Slope pada kemiringan 1 dan 2 (meter) Vh = Kecepatan kapal pada kemiringan terjal (m/s) Vt = Kecepatan kapal pada kemiringan yang landai (m/s)
2.7Sound Velocity Profile (SVP)
16
sangat kompleks untuk dibahas. Namun variasi nilai kecepatan rambat suara ini relatif kecil.
Kecepatan suara dapat diketahui secara langsung secara in-situ dengan menggunakan velocimeters atau dapat dikalkulasikan dengan menggunakan sebuah formula jika nilai temperatur (T), salinitas (S), dan tekanan hidrostatis (P) diketahui. Salah satu formulasi yang dapat digunakan untuk menghitung nilai kecepatan suara menurut Medwin (1998) yaitu:
c = 1449, 2 + 4.6T + 0,055T2+ 0,00029T3 + (1,34 – 0,010T) (S-35)
+0, 016Z ... (4) Kecepatan suara ini memiliki nilai yang bervariasi. Kinsler et al, (2000) membuat suatu profil kecepatan suara ketika berada di dalam kolom perairan. Perubahan kecepatan suara secara drastis terjadi pada palung laut atau berada pada lapisan thermocline. Hal ini dikarenakan pada lapisan tersebut terjadi perbedaan suhu yang signifikan. Gambar 9 menggambarkan profil kecepatan suara yang umumnya terjadi di perairan laut.
17
2.8 Differential Global Potitioning System (DGPS) SeaStar 8200VBS
Penentuan posisi dapat diketahui melalui sebuah sistem yang berbasis satelit yang disebut GPS. Presisi atau keakuratan menjadi hal yang paling utama dalam sistem ini. Differential GPS merupakan salah satu sistem yang mampu memberikan informasi posisi dengan tingkat keakuratan yang tinggi (Seeber, 2003) Konsep DGPS dalam penentuan posisi yaitu dengan menggunakan stasiun pengamatan yang berada di darat atau yang disebut Reference station. Gambaran mengenai sistem kerja DGPS dapat dilihat pada gambar 10 dibawah ini
Sumber: http://muislife.com/survey-hidrografi-untuk-monitoring-alur-pelayaran.html
Gambar 10. Cara kerja sistem DGPS terhadap reference station
18
penentuan posisi. Berdasakan akurasi yang ingin dicapai, DPGS terdiri dari beberapa klasifikasi, yaitu :
1. Ordinary GPS
2. Carier Smooth DGPS
3. Precise DGPS
Sistem yang bekerja pada DGPS ini pada umumnya sama dengan sistem GPS pada umumnya, namun yang berbeda adalah pada sistem DGPS ini terdapat satu satelit yang telah menjadi acuan dalam penentuan posisi. Satelit ini akan terus menerus memberikan informasi posisi pada SeaStar 8200 VBS.
2.9 Gunung Bawah Laut (Seamount) dan Dimensinya
Definisi mengenai gunung bawah laut (seamount) berkebang dari tahun ke tahun. Hal ini didasarkan pada sudut pandang disiplin ilmu yang digunakan oleh beberapa peneliti. Menurut Menard (1964), gunung bawah laut dapat
didefinisikan sebagai material yang membentuk sebuah ketinggian yang berada di dasar laut dengan bentuk yang bulat atau elips dengan ketinggian minimum1 kilometer dan memiliki kemiringan (slope) tertentu serta terdapat puncak yang berukuran kecil. Schieferdecker (1959) menyebutkan bahwa gunung bawah laut didefinisikan sebagai sebuah daerah di permukaan bumi dimana bahan magma dari dalam bumi keluar atau pernah keluar pada masa lampau, biasanya akan membentuk suatu gunung, berbentuk kerucut dan mempunyai kawah di bagian puncaknya . Secara bentang alam William dan McBirney (1979) membagi gunung yang
19
Berberapa faktor pembentukan gunung bawah laut menurut Spence and Turcotte(1985) terdiri dari beberapa proses. Pertama, material-material yang ada di bawah lapisan bumi memiliki asupan panas atau magma dari perut bumi
tepatnya di lapisan litosphere. Kedua, magma yang berasal dari dalam perut bumi memiliki energi yang cukup untuk terangkat ke atas tanpa adanya proses
pembekuan selama pembentukan tonjolan menyerupai gunung (Gass et al.,1978). Sebagian besar gunung bawah laut belum dapat diketahui keberadaannya, hal ini dikarenakan hanya sebagian kecil saja dari dasar laut yang berhasil
dipetakan oleh kapal yang melakukan survei kelautan. Perolehan data mengenai gunung api bawah laut (seamount) pada awalanya dilakukan hanya dengan menggunakan peta profil batimetri disuatu perairan. Mekanisme penentuan ini lebih sering dilakukan bila dibandingkan dengan harus melakukan interpolasi dari sebuah peta. Sekitar 90% gunung bawah laut dengan ketinggian kurang dari 1 kilometer tidak dapat terlihat atau teramati, hal ini dikarenakan gunung
tersebut terlihat hanya sebagai gundukan-gundukan kecil diantara gunung-gunung tinggi disekitarnya (Craig dan Sandwell, 1988).
20
altimetry anomali gravitasi di bawah permukaan laut (Gambar 10). Informasi terbaru berdasarkan hasil penelitian Yesson. C et al. pada tahun 2011, diperoleh data bahwa diseluruh dunia terdapat 33.452 gunung bawah laut (seamount) dan 138.412 bukit kecil.
Gambar 11. Peta penyebaran gunung bawah laut (seamount) dunia (Kitchingham dan Lai, 2004)
Harian Kompas yang terbit pada tanggal 28 Mei 2009 mencatat bahwa Indonesia memiliki beberapa Gunung api bawah laut, antara lain :
1. Gunung Submarine di Sulawesi Utara.
2. Gunung Mahangetang di Pulau Mahangetang.
21
Sumber : http://unimak.us/landforms.shtml
Gambar 12. Morfologi gunung api. Keterangan :
1. Dapur magma 9. Lapisan Lava
2. Batuan Dasar 10. Kenpundan
3. Pipa Kawah 11. Kerucut Parasit Gunung Api 4. Permukaan Dasar 12. Aliran Lava
5. Retas (skill) 13. Kawah 6. Pipa Kawah Sekunder 14 Bibir Kawah 7. Lapisan Abu Gunung Api
22
3. METODOLOGI PENELITIAN
3.1 Lokasi dan Waktu Penelitian
Pengambilan data atau akuisisi data kedalaman dasar perairan dilakukan pada tanggal 18-19 Desember 2010 di perairan barat daya Provinsi Bengkulu oleh Badan Pengkajian dan Penerapan Teknologi (BPPT). Lokasi tersebut dipilih karena menjadi jalur survei kelautan yang dilakukan oleh tim riset kelautan BPPT, LIPI, Departemen ESDM, Compagnie Générale de Géophysique-Veritas ( CGC-Veritas) dan IPG (Institut de Physique du Globe) Paris
Pengolahan data dilakukan selama 5 bulan yaitu pada bulan Maret hingga bulan Juli tahun 2012. Data yang digunakan dalam penelitian ini termasuk kedalam kategori data primer. Hal ini disebabkan data dari hasil pemeruman
(sounding) kapal survei dan belum pernah diolah sebelumnya. Pengolahan data penelitian ini dilakukan di Laboratorium Akustik dan Instrumentasi Kelautan Fakultas Perikanan dan Ilmu Kelautan , Institut Pertanian Bogor (IPB) dan
Laboratorium Balai Teknologi Survei Kelautan, Badan Pengkajian dan Penerapan Teknologi (BPPT) Jakarta. Gambar 13 merupakan lokasi survei yang dilakukan oleh tim riset kelautan dan sekaligus menjadi lokasi penelitian yang dilakukan.
23
24
3.2 Pengambilan Data Multibeam
Survei batimetri dilakukan menggunakan dua buah instrumen multibeam
yaitu jenis ELAC SeaBeam 1050D dengan frekuensi 50 kHz dengan kedalaman maksimum mencapai 3000 meter (Lampiran 1). Jenis instrumen jenis lain yang digunkan yaitu Simrad EM 12D dengan frekuensi 12 kHz yang memiliki
kemampuan deteksi hingga mencapai 10.000 meter. Kedua instrumen mutibeam
ini masing-masing terpasang pada Kapal Riset Baruna Jaya III dan Baruna Jaya IV. Profil Kapal riset Baruna Jaya IV dapat dilihat pada lampiran 2.
Data multibeam yang diperoleh merupakan data yang telah mengalami koreksi terhadap pengaruh pergerakan kapal seperti pitch, heave, dan roll. Koreksi tersebut dilakukan menggunakan sensor attitudeandpositioning Coda Octopus F 180 (Lampiran 3). Data hasil koreksi pengaruh pergerakan kapal selanjutnya digunakan untuk proses koreksi selanjutnya, yaitu koreksi offset static. Titik referensi kapal diperlukan dalam penentuaan beberapa komponen koreksi offset. Sistem navigasi yang digunakan pada kapal survei diatur dalam perangkat lunak Hypack yang secara langsung terhubung dengan sistem akuisisi data multibeam. Data mentah atau Raw data hasil kegiatan pemeruman
25
Gambar 14. Diagram alir perolehan dan pengolahan data multibeam
Dalam pelaksanaan survei batimetri, perekaman data batimetri dilakukan berdasarkan jalur survei. Akuisisi data yang dilakukan untuk mengetahui
keberadaan gunung bawah laut diperoleh melalui penyusuran jalur survei. Desain survei yang dilakukan oleh kapal Baruna Jaya III dan Baruna Jaya IV dengan instrumen akustik dapat dilihat pada gambar 15 dan 16 di bawah ini.
Navigasi
8200 VBS Transducer
CTD/SVP
26
Gambar 15. Jalur survei kapal selama melakukan kegiatan
27
Gambar 16. Jalur survei kapal selama melakukan kegiatan
28
3.3 Pengolahan Data Kedalaman (Batimetri)
Pengolahan data kedalaman di lokasi penelitian dilakukan dengan menggunakan perangkat lunak CARIS HIPS and SIPS 6.1. Perangkat lunak tersebut diperoleh dari Badan Pengkajian dan Penerapan Teknologi (BPPT) Jakarta. Raw data multibeam yang berasal dari ELAC SeaBeam 1050D
berekstensi .xse, sedangkan data yang berasal dari Simrad EM 12D berekstensi .all. Kedua jenis data tersebut tidak dapat secara langsung diproses pada CARIS HIPS and SIPS 6.1. Pengolahan data multibeam secara umumdengan software
ini dimulai dengan konfigurasi kapal atau pembuatan file kapal (Vessel file). File kapal ini memuat informasi mengenai koordinat setiap sensor yang direferensi terhadap titik pusat kapal. Proses berikutnya terdiri dari
pembuatan project, menentukan sistem koordinat yang digunakan dan melakukan konversi data (Conversion Wizard) sesuai dengan jenis multibeam yang
digunakan dan penyimpanan session yang akan menampilkan urutan objek yang ditampilkan dalam Windows Display.
Proses selanjutnya yang harus dilakukan adalah melakukan beberapa koreksi terhadap data sensor seperti Navigation Editor, Swath Editor, dan Altitude Editor pada fase Clean Auxiliary Sensor Data. Koreksi pasang surut (tide) dan
Sound Velocity Profile (SVP) juga perlu dilakukan sebelum proses penggabungan
29
Gambar 17 menjelaskan secara rinci mengenai pemrosesan data batimetri pada perangkat lunak tersebut.
Gambar 17. Diagram alir pengolahan data multibeam pada CARIS HIPS and SIPS 6.1
Tingkat ketelitian dari data hasil pemeruman menjadi hal utama yang perlu untuk diketahui. Ketelian akan berhubungan dengan seberapa akurat data
30
tersebut memberikan informasi mengenai nilai kedalaman sebenarnya di lokasi penelitian. Perhitungan limit error dari akurasi kedalaman sangat diperlukan untuk tujuan validasi data yang dihasilkan. Proses perhitungan limit error
mengacu pada standar IHO 1998. Perhitungan limit error ini didasarkan pada nilai a dan b yang terdapat pada tabel standar minimum survei. Perhitungan tersebut dapat dihitung secara matematis dengan formula :
Limit error = ± [a2 + (b x d)2 ] ... (5) Keterangan :
a = Konstanta kesalahan independen (jumlah kesalahan yang bersifat tetap).
b = Faktor kesalahan kedalaman dependen (jumlah kesalahan kedalaman yang bersifat tidak tetap).
d = Kedalaman terukur.
b x d = Kesalahan kedalaman yang dependen (jumlah semua kesalahan kedalaman yang dependen).
3.4 Pengambilan Data Sound Velocity Profile (SVP)
Data SVP diperoleh melalui sebuah alat yang disebut CTD tipe SBE 19. Instrumen ini memiliki beberapa sensor yang mampu merekam (recorded)
parameter oseanografi seperti nilai konduktivitas, suhu dan kedalaman periaran. Salah satu keuntungan dari penggunaan instrumen ini adalah mampu dioperasikan secara portable.
3.5 Pengambilan Data Pasang Surut (Tide)
31
pasang surut Seblat yang terletak di Kabupaten Bengkulu Utara (Lampiran 7). Data yang diambil adalah data pasang surut pada 18-20 Desember 2010.
3.6 Pemrosesan Data
Data multibeam yang diperoleh melalui akuisisi data merupakan data kedalaman, amplitudo dan data backscatter. Data kedalaman dapat diolah dengan menggunakan perangkat lunak (software) CARIS HIPS and SIPS 6.1. Data amplitudo dan backscatter diperoleh melalui pemrosesan data melalui MBSystem
yang bekerja pada sistem operasi Linux. Visualisasi gunung bawah laut secara 3D dilakukan dengan perangkat lunak Fledermaus 6.2.
3.7 Pemrosesan Data Backscatter danAmplitudo
Karakteristik dasar perairan dapat diketahui dari nilai hambur balik
(backscatter) yang diterima oleh receiver. Sama halnya dengan pengolahan data kedalaman, untuk menghasilkan nilai hambur balik dasar perairan dibutuhkan tahap-tahap pengolahan data. MBCLEAN digunakan untuk mengoreksi beam
yang dianggap buruk. Pengoreksian secara manual melalui visualisasi dari
masing-masing beam dapat dilakukan dengan MBEDIT. Koreksi navigasi seperti
heavy, pitch, dan roll dapat dilakukan dengan bantuan MBNAVEDIT. Koreksi terhadap pengaruh kecepatan suara dilakukan dengan MBVELOCITY,hal ini dilakukan untuk menghilangkan perubahan kecepatan suara yang terjadi selama survei dilakukan. MBBACKANGLE digunakan untuk mengoreksi sudut bukaan
32
survei agar diperoleh nilai hambur balik (backscattering) dan amplitude dasar perairan.
Setiap jenis multibeam memiliki kode ID tersendiri sehingga akan menghasilkan file output yang berbeda. Dalam penelitian ini jenis multibeam
ELAC SeaBeam akan menghasilkan file output *mb94. Sedangkan jenis Simrad EM 12D menghasilkan file output *mb51.
33
3.8 Pengukuran Dimensi Gunung Bawah Laut
Ukuran gunung bawah laut dapat diketahui melalui pengukuran dimensinya. Bentuk gunung bawah laut yang asimetris menjadi salah satu
kendala dalam melakukan pengukuran. Gunung bawah laut ini akan diasumsikan sebagai suatu objek yang berbentuk kerucut dengan alas yang berbentuk elips, hal ini dilakukan agar pengukuran relatif lebih mudah dilakukan. Bentuk alas yang berupa bangun datar elips akan mengakibatkan terbentuknya dua sumbu simetri yang juga merupakan diameter dari bangun datar tersebut. Elips memiliki 2 buah diameter, yaitu diameter panjang (major axis) dan diameter pendek (minor axis). Pengukuran dimensi pada penelitian ini lebih difokuskan kepada perhitungan tinggi dan diameter dari gunung tersebut. Bentuk gunung bawah laut yang berada di lokasi survey dapat diasumsikan melalui gambar bangun ruang kerucut seperti pada gambar 19 di bawah ini
(a) (b)
Gambar 19. Asumsi bentuk gunung bawah laut. (a) bentuk kerucut dan (b) alas gunung yang berbentuk elips
34
4.1 Hasil
4.1.1 Sound Velocity Profile (SVP)
Pengukuran nilai Sound Velocity Profile (SVP)dilakukan dengan menggunkan sebuah instrumen CTD SBE 19. Instrumen ini memiliki tingkat keakuratan yang tinggi dalam melakukan pengukuran dan perekaman data. Alat ini mampu mengukur parameter oseanografi seperti nilai konduktivitas, suhu dan kedalaman. Kedalaman yang dapat diukur dengan menggunakan alat ini
mencapai 700 meter (Sea-Bird Electronics, 2006).
Gambar 20 merupakan grafik kecepatan suara di lokasi penelitian. Secara umum kecepatan suara relatif konstan hingga kedalaman kurang dari 142,36 meter. Kecepatan suara mengalami penurunan nilai secara perlahan dengan bertambahnya kedalaman. Penurunan kecepatan suara secara ekstrim terjadi pada kedalaman 283,73 meter. Pada rentang ini diperkirakan terdapat lapisan
thermocline. Tujuan pengambilan data kecepatan suara ini untuk mengetahui waktu tempuh gelombang suara dan nilai kedalaman perairan.
4.1.2 Pasang Surut
Pengamatan terhadap nilai pasang surut pada kegiatan survei hidrografi sangat diperlukan untuk menentukan bidang acuan kedalaman serta akan menentukan koreksi nilai kedalaman pada saat pemeruman. Data pasang surut yang digunakan adalah data milik Badan Informasi Geospasial (BIG) yang dahulunya bernama Badan Koordinasi Survei dan Pemetaan Nasional
(BAKOSURTANAL) pada stasiun pasang surut Seblat di daerah Bengkulu Utara tepatnya pada koordinat 3 13’26,6” LS dan 101 35’58,4” BT (Lampiran 7).
Nilai pasang surut akan mempengaruhi nilai suatu kedalaman yang akan kita dapatkan. Data hasil pengukuran dikoreksi menggunakan datum Mean Sea Level (MSL). Datum ini digunakan karena hasil pengukuran akan menghasilkan data kedalaman yang akurat (Sasmita, 2008). Pengolahan data pasang surut pada
software CARIS HIPS and SIPS 6.1 dilakukan melalui menu CARIS HIPS Tide Editor. Visualisasi kondisi pasang surut di lokasi penelitian dapat dilihat pada gambar 21.
Pengukuran pasang surut ini menggunakan satelit altimetry milik NOAA. Berdasarkan gambar diatas, permukaan air laut mengalami naik turun secara fluktuatif, hal ini menunjukkan adanya perbedaan ketinggian permukaan air laut. Tipe pasang surut suatu perairan bergantung pada kondisi perubahan kedalaman perairan atau geomorfologi pantai setempat. Nilai kisaran pasang surut dilokasi peneltian berkisar antara -0,8 meter – 0,8 meter. Tipe pasang surut perairan Bengkulu termasuk kedalam tipe pasang surut diurnal, artinya pasang surut akan dua kali dalam sehari dengan ketinggian yang berbeda. Data pasang surut selama kegiatan survei terlampir pada lampiran 8.
4.1.3 Topografi Dasar Laut
Data multibeam yang diperoleh melalui kegiatan survei yang dilakukan oleh Kapal Baruna Jaya 3 dan Kapal Baruna Jaya 4 milik BPPT dapat diekstrak untuk mendapatkan topografi dasar laut. Lokasi penelitian merupakan perairan yang digolongkan sebagai perairan laut dalam. Hal ini dapat dilihat dari nilai kedalaman yang lebih dari 200 meter. Selain itu lokasi ditemukannya gunung bawah laut ini juga merupakan kawasan perairan terbuka yang langsung berhubungan dengan Samudera Hindia.
Proses akuisisi data dengan menggunkan perangkat akustik ini
memerlukan sejumlah koreksi agar diperoleh data yang akurat. Koreksi terhadap pergerakan kapal selama di laut atau yang lebih dikenal dengan istilah Degree of Freedom (DoF) seperti pitch, roll, heave, dan time delay sangat diperlukan. Koreksi secara realtime dapat langsung dilakukan dengan menggunakan
Positioning System (DGPS) SeaStar 8200 VB yang memiliki nilai akurasi sebesar 1 meter.
Tingkat keakuratan dari kegiatan survei harus selalu dijaga agar data yang dihasilkan mampu memberikan informasi yang mendekati akurat. Lokasi
penelitian berada pada orde 3 berdasarkan IHO tahun 1998. Orde 3
diperuntukkan bagi wilayah perairan yang berada di laut lepas (offshore). Spasi lajur pemeruman pada orde ini berada pada 4 kali kedalaman rata-rata. Special Publication No. 44 (S.44) -IHO Tahun 1998 menjelaskan bahwa skala
pemeruman menentukan resolusi dari peta batimetri yang dihasilkan. Profil batimetri dapat diperoleh dengan cara memplotkan nilai-nilai kedalaman selama melakukan kegiatan pemeruman. Informasi yang dibutuhkan untuk menghasilkan peta batimetri terdiri dari posisi dan nilai kedalaman yang terukur. Batimetri dari beberapa line survei dengan menggunakan instrumen Simrad EM 12D dan ELAC SeaBeam 1050D ditampilkan secara 3 dimensi. Proses visualisasi batimetri dilakukan dengan menggunakan perangkat lunak
Surfer 9. Kedalaman perairan yang berhasil di deteksi pada line survei Simrad EM 12D ini memiliki rentang kedalaman dari 3.750 meter hingga mencapai 5.000 meter di bawah permukaan laut. Setiap instrumen akustik memiliki cakupan yang berbeda-beda dalam melakukan pemeruman. Semakin baik kualitas alat yang digunakan, maka akan menghasilkan gambar yang lebih jelas. Beberapa line survei, tepatanya line survei 0061_140810_180546_raw dan line
Gambar 22. Profil batimetri beberapa line survei menggunakan Simrad EM 12D
Tampilan yang hampir serupa juga diperoleh pada gambar 23 yang merupakan tampilan 3 dimensi beberapa line survei, tepatnya pada line
Seamount_002.xse hingga Seamount_006.xse dengan menggunakan perangkat akustik ELAC SeaBeam 1050D. Bentuk dasar laut yang berhasil divisualisasikan melalui alat ini masih berbentuk topografi dasar laut yang tidak rata. Nilai
kedalaman perairan pada gambar ini berada pada rentang 1.300 meter hingga 3.000 meter di bawah permukaan laut.
Tampilan batimetri yang dihasilkan melalui pengolahan data batimetri pada CARIS HIPS and SIPS 6.1 merupakan visualisasi gambar topografi dasar laut secara 2 dimensi. Perbedaan masing-masing kedalaman ditunjukkan oleh gradasi warna. Gambar 24 merupakan visualisasi dari batimetri lokasi penelitian dengan menggunkan instrumen akustik Simrad EM 12D pada CARIS HIPS and SIPS 6.1. Kedalaman perairan yang terbesar digambarkan dengan warna biru. Gambar yang dihasilkan relatif lebih smooth. Berdasarkan gradasi warna yang ada, terilihat bahwa warna-warna tersebut akan mengerucut dengan ditandai berkurangnya instensitas warna, mulai dari warna hijau, kuning dan warna merah. Warna merah diilustrasikan sebagai puncak gunung laut yang berhasil dideteksi melalui kegiatan pemeruman. Gelombang suara yang dihasilkan oleh instrumen Simrad EM 12D mampu untuk melakukan pemeruman hingga kedalaman 10.000 meter sehingga daerah disekitar kaki gunung bawah laut tersebut dapat ikut divisualisasikan. Data batimetri Simrad EM 12D terlampir (Lampiran 4).
Tampilan gunung bawah laut (seamount) juga dapat terlihat dari hasil pemeruman dengan menggunakan SeaBeam 1050D. Berdasarkan gambar 25, terdapat dua buah objek yang terpisah satu sama lain yang ditunjukkan oleh warna kemerahan. Objek ini diindikasikan adalah sebuah puncak gunung bawah laut. Perolehan image yang hanya berupa puncak gunung bawah laut ini dikarenakan instrumen SeaBeam 1050D hanya memiliki kemampuan untuk melakukan pemeruman maksimum pada kedalaman 3000 meter. Bila dibandingkan dengan instrumen Simrad EM 12D, jenis alat ini memiliki keterbatasan dalam melakukan kegiatan pemeruman pada kedalaman lebih dari 3000 meter dan akan dianggap sebagai noise berdasarkan spesifikasi alat.
Berdasarkan gambar tersebut, dapat telihat bahwa puncak gunung bawah laut tersebut memiliki lebih dari satu puncak yang dipisahkan oleh sebuah celah. Hasil yang diperoleh melalui gambar ini cukup memberikan informasi mengenai jumlah puncak dari gunung bawah laut tersebut. Namun untuk mendapatkan informasi lain seperti dimensi gunung secara keseluruhan, tampilan ini belum dapat memberikan informasi secara lengkap.
4.1.4 Gunung Bawah Laut
Seperti yang telah dijelaskan sebelumnya, instrumen SeaBeam 1050D melalukan pemeruman (sounding) tepat berada di atas gunung bawah laut sehingga kondisi disekitar kaki gunung bawah laut tidak dapat ditampilkan. Penggunaan instrumen ini sangat memungkinkan untuk mengetahui bentuk
gunung bawah laut secara detail khususnya pada bagian atas dari gunung tersebut. Berdasarkan tampilan yang ada, gunung bawah laut tersebut memiliki dua buah puncak yang dipisahkan oleh kaldera (Gambar 26).
Salah satu keuntungan yang diperoleh dengan digunakannya instrumen Simrad EM 12D adalah memiliki sapuan perekaman yang lebih luas terhadap objek yang ada di dasar perairan. Hal ini menyebabkan daerah disekitar kaki gunung mampu dideteksi dengan jelas (Gambar 27). Bentuk gambar yang dihasilkan relatif lebih baik atau smooth bila dibandingkan dengan SeaBeam 1050D. Penampakan secara utuh dari gunung bawah laut dapat terlihat dari hasil perekaman data melalui instrumen ini. Visualisasi dari hasil pemeruman
(sounding) melalui instrumen akustik ELAC SeaBeam 1050D dan Simrad EM 12D ini ditampilan dari arah depan dengan barat daya sebagai acuannya dan tampak atas agar terlihat lebih jelas mengenai morfologi dari gunung bawah laut
Gunung tersebut ditemukan berada pada jarak ± 320 kilometer dari arah kota Bengkulu tepatnya pada koordinat 40 22’9,16’’ LS dan 990 25’ 01,47’’ BT.
Daerah disekitar gunung dideteksi memiliki kedalaman hingga mencapai ± 6.300 meter. Bentuk dari gunung tersebut dapat dikatakan memiliki bentuk yang asimetris. Hal ini dapat terlihat lebar dari kedua sisi yang tidak sama.
(a)
(b)
(a)
(b)
4.1.5 Dimensi Gunung Bawah Laut
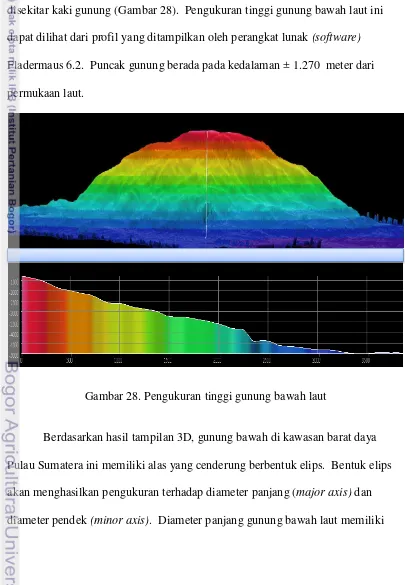
Pengukuran dimensi dalam penelitian ini lebih difokuskan kepada tinggi dan diameter dari gunung tersebut. Tinggi gunung bawah laut secara umum mencapai ± 3.968 meter. Nilai ini diperoleh dari hasil pengurangan atau selisih antara tinggi puncak maksimum gunung di bawah permukaan laut dan kedalaman disekitar kaki gunung (Gambar 28). Pengukuran tinggi gunung bawah laut ini dapat dilihat dari profil yang ditampilkan oleh perangkat lunak (software)
Fladermaus 6.2. Puncak gunung berada pada kedalaman ± 1.270 meter dari permukaan laut.
Gambar 28. Pengukuran tinggi gunung bawah laut
nilai ± 50.240 meter, sedangkan diameter pendek dari gunung tersebut ± 5.644 meter. Pengukuran terhadap diameter gunung dapat dilihat pada gambar 29 dan gambar 30. Gunung bawah laut pada penelitian ini bisa dikatakan sebagai gunung yang memiliki ukuran yang relatif sangat besar. Ukuran menjadi faktor penting dalam pengklasifikasian bentuk gunung bawah laut. Metode yang sampai saat ini masih digunakan untuk mengetahui sebaran gunung bawah laut di dunia yaitu dengan menggunakan satelit altimetry dan penggunaaan gelombang akustik. Gunung bawah laut yang berukuran besar akan mudah untuk dideteksi
keberadaanya sehingga informasi mengenai sebarannya akan lebih mudah untuk diketahui.
Gambar 30. Pengukuran diameter pendek (minor axis) gunung bawah laut
Informasi mengenai keberadaan gunung bawah laut tidak hanya dilihat dari posisi gunung tersebut di perairan. Puncak (peak) yang berukuran lebih kecil merupakan salah satu ciri dari sebuah gunung yang mudah untuk diamati.
Pengamatan terhadap puncak gunung dapat dilihat dari data batimetri hasil kegiatan pemeruman dengan tingkat akurasi alat yang tinggi. Berdasarkan tampilan batimetri 2 dimensi yang berasal dari perangkat lunak CARIS HIPS and SIPS 6.1 maupun tampilan 3 dimensi dari Fledermaus 6.2, diperoleh informasi bahwa gunung bawah laut yang berada di perairan barat daya Pulau Sumatera ini memilik jumah puncak yang lebih dari satu. Umumnya sebuah gunung hanya memiliki satu puncak, jumlah puncak yang lebih dari satu ini merupakan hal yang menarik dalam mempelajari struktur dari gunung tersebut. Gambar 31
Gambar 31. Pengukuran jarak antar puncak
Keberadaan dua buah puncak gunung ini mengakibatkan terbentuknya sebuah celah atau kaldera gunung. Kedalaman celah ini diukur dari puncak gunung terhadap kedalaman maksimum daerah yang membentuk sebuah cekungan di bagian atas gunung. Penggunaan perangkat lunak (software)
Gambar 32. Celah diantara dua puncak gunung
4.1.6 Nilai Amplitudo
Sebaran nilai amplitudo SeaBeam 1050D diperoleh melalui pemrosesan data mentah hasil survei dengan menggunakan perangkat lunak MBSystem. Data-data tersebut kemudian diplotkan kedalam sebuah gambar sehingga
diperoleh sebaran nilai amplitude (Gambar 33). Nilai amplitudo dari lokasi survei berada pada rentang 100 mVolt – 800 mVolt. Berdasarkan sebaran nilai
4.1.7 Sebaran Nilai Backscatter
Nilai backscatter menggambarkan besarnya nilai hambur balik dari gelombang suara yang ditransmisikan oleh sebuah alat akustik kedalam perairan. Gelombang suara tersebut akan kembali dan diterima oleh receiver. Menurut Kågesten (2008), backscatter didefinisikan sebagai refleksi gelombang suara kembali menuju sumber gelombang suara itu berasal.
Setiap objek memiliki tingkat kekasaran (hardness) dan kekerasan
(roughness) yang berbeda. Hal ini dapat dikarenakan kandungan material benda antara benda yang satu dan benda yang lain berbeda. Benda-benda yang memiliki tingkat kekerasan seperti bebatuan akan memiliki nilai hambur balik (backscatter)
yang lebih besar bila dibandingkan dengan dengan material lunak seperti lumpur atau biota-biota laut. Selain faktor kekerasan, nilai hambur balik juga dipengaruhi oleh faktor kekasaran (roughness) suatu benda.
Material yang memiliki bentuk permukaan yang halus cenderung akan memiliki gelombang pantul yang teratur menuju receiver. Nilai backscatter
voltage gain (V) dan reference voltage (Vr). Nilai ini didasarkan pada sinyal
suara yang dihasilkan trandcucer ketika melalukan pemeruman berupa energi listrik. Perhitungan nilai hambur balik dari multibeam membutuhkan proses yang relatif lebih rumit. Kerumitan ini dapat dianalogikan melalui sebuah ilustrasi bahwa sapuan multibeam akan menghasilkan bentuk berupa garis, sedangkan
single beam hanya berupa titik (Hasanudin 2009). Tahapan pertama yang harus dilakukan dalam pengolahan data backscatter yaitu dengan menggunkan suatu algoritma khusus (Kågesten, 2008). Formula yang dapat digunakan dalam melakukan konversi nilai amplitudo kedalam unit backscatter yaitu :
4.2 Pembahasan
4.2.1 Sound Velocity Profile (SVP)
Berdasarkan hukum fisika, perambatan suara memerlukan media. Suara dapat merambat melalui benda padat, cair dan gas. Hal ini juga berlaku pada perairan laut yang menggunakan air sebagai medianya. Kecepatan suara air laut mencapai ± 1.540 meter/second. Kecepatan suara ini memiliki nilai yang bervariasi. Hal ini dapat disebabkan oleh beberapa faktor seperti: suhu, salinitas dan tekanan air laut
Peningkatan suhu sebesar 10 C akan meningkatkan kecepatan perambatan gelombang akustik sebesar 4 m/s. Suhu di perairan banyak dipengaruhi oleh panas dari sinar matahari, upwelling, hujan dan run off dari sungai (Kinsler et al., 2000). Peningkatan tekanan air laut sebesar 1 Km akan menyebabkan cepat rambat gelombang akustik meningkat sebesar 17 m/s dan peningkatan nilai salinitas sebesar 1 ppm akan menyebabkan peningkatan kecepatan rambat
gelombang akustik sebesar 1,4 m/s. Faktor-faktor yang dapat mempengaruhi nilai salinitas di suatu perairan dapat disebabkan oleh evaporasi, presipitasi, pengaruh masukan air dari sungai dan efek dari adanya pasang surut.
Kecepatan suara menjadi pengaruh yang sangat besar bagi proses perambatan suara di kolom perairan. Sebuah perangkat lunak akan error atau tidak dapat diproses apabila memiliki nilai yang tidak sesuai (Brennan, 2009). Perubahan kecepatan suara secara drastis dalam kolom perairan dapat terjadi pada palung laut atau pada lapisan thermocline. Suhu dipermukaan laut pada umumnya lebih tinggi bila dibandingkan di dasar laut. Permukaan laut lebih banyak
lebih tinggi. Kondisi ini juga akan memicu terjadinya pembetukan daerah mixed layer yang akan terjadi secara terus-menerus hingga sore hari. Faktor-faktor yang telah disebutkan sebelumnya memiliki hubungan yang sangat kompleks untuk dibahas. Gambar 35 memberikan gambaran dari masing-masing faktor yang telah disebutkan sebelumnya terhadap perubahan kecepatan suara di laut.
Gambar 35. Hubungan antara suhu, salinitas dan tekanan terhadap kecepatan suara (Kinsler et al., 2000)
Profil kecepatan suara di lokasi penelitian diperoleh berdasarkan hasil pengukuran dengan menggunakan CTD. Sumbu X berdasarkan gambar diatas merupakan nilai dari kecepatan suara. Sedangkan sumbu Y merupakan
waktu pemancaran pulsa suaran dan waktu penerimaan pulsa suara oleh receiver
diketahui maka kedalaman suatu perairan dapat diukur secara matematis melalui persamaan :
Kedalaman = x Sound speed x Echo time ... (7) Keterangan :
Sound Speed :Kecepatan rambat suara di suatu perairan
Echo time : Selisih waktu antara pulsa suara yang dipancarkan dan pulsa suara yang diterima.
4.2.2 Pasang Surut
Tipe pasang surut di lokasi penelitian termasuk kedalam jenis pasang surut tipe campuran. Jenis pasang surut ini tidak jauh berbeda dengan penelitian yang telah dilakukan oleh L.Arifin et.al., (2003) yang menyebutkan bahwa tipe pasang surut di daerah bengkulu termasuk ke dalam kategori pasang surut diurnal. Nilai pasang surut akan berpengaruh terhadap nilai kedalaman perairan sesungguhnya di lokasi penelitian.
Perolehan data pasang surut berasal dari Badan Informasi Geospasial (BIG) yang bekerja sama dengan penyedia data pasang surut milik National Oceanic and Atmospheric Administration (NOAA) melalui stasiun pengamatan pasang surut Seblat. Perekaman data pasang surut ini menggunkan sistem satelit
elektrmagnetik (radar) kepermukaan laut. Pulsa-pulsa tersebut dipantulkan balik oleh permukaan laut dan diterima kembali oleh satelit.
4.2.3 Topografi Dasar Laut
Pergerakan kapal selama di lokasi penelitian mengalami berbagai gerakan akibat proses dinamika laut. Gerakan kapal akan mempengaruhi data multibeam
yang akan dihasilkan. Data mentah multibeam (raw data) tersebut kemudian diproses untuk mendapatkan gambar topografi dasar laut secara 2 dimensi. Pemrosesan data CARIS HIPS and SIPS 6.1 terdiri dari beberapa tahap
pengkoreksian. Hal ini bertujuan untuk mengurangi besarnya kesalahan dalam perolehan data sehingga data yang dihasilkan akurat. Koreksi swath dan navigasi kapal perlu untuk dilakukan. Koreksi swath dilakukan bertujuan untuk
menghilangkan sinyal-sinyal yang dianggap memiliki nilai yang kurang baik dan melakukan interpolasi sinyal-sinyal tersebut.
Pada proses pengolahan data multibeam, setiap beam memberikan pengaruh yang sangat besar sehingga dibutuhkan koreksi yang baik untuk
menghindari error yang berlebih. Pada Penelitian ini CARIS HIPS and SIPS 6.1 memberikan tampilan beam berwana merah dan hijau (default setting). Beam
merah merupakan sinyal yang berasal dari sisi kanan lambung kapal, sedangkan
beam yang berwarna hijau berasal dari sisi kiri. Warna kuning pada beam
Gambar 36. Proses koreksi swath data multibeam pada CARIS HIPS and SIPS 6.1
Atitude dari sinyal akustik yang dipancarkan oleh transducer juga dikoreksi untuk menghilangkan pengaruh yang buruk agar menghasilkan data yang akurat. Proses koreksi terhadap altitude ini dilakukan melalui altitude editor
pada CARIS HIPS and SIPS 6.1. Sinyal-sinyal yang dianggap kurang baik selama kegiatan survei harus dikoreksi. Dalam proses pengolahan data
Gambar 37. Proses koreksi attitude data multibeam pada perangkat lunak CARIS HIPS and SIPS 6.1
Gambar 38. Proses koreksi kecepatan kapal
4.2.4 Gunung Bawah Laut
Gunungbawah laut memiliki bentuk dan ukuran yang tidak sama satu dan yang lainnya. Secara umum, gunung bawah laut memiliki alas berbentuk bulat atau elips serta memiliki puncak yang berada diatasnya. Kitchingman et al. (2007) menjelaskan bahwa puncak gunung merupakan karakteristik dari sebuah gunung bawah laut. Sudut kemiringan atau slope dari dari gunung bawah laut dapat mencapai 60o (OSPAR Commission, 2010).
batimetri akan memberikan informasi yang saling melengkapi dan akurat mengenai gunung bawah laut.
Pemetaan terhadap gunung bawah laut tidak hanya memberikan
informasi mengenai pola penyebarannya. Keberadaan gunung bawah laut di suatu perairan memberikan informasi tidak hanya dari satu disiplin ilmu. Berbagai informasi seperti proses geologi, ekologi, identifikasi daerah potensial terjadinya letusan gunung berapi, hingga pengelolaan terhadap makhluk hidup.
4.2.5 Sebaran Nilai Amplitudo
Nilai amplitudo yang berada di lokasi penelitian cenderung menyebar disepanjang jalur survei yang dilakukan di lokasi penelitian. Kisaran nilai ini relatif luas yaitu antara 100 mV – 800 mV. Perbedaan dari nilai impedansi akustik dari masing-masing jenis sedimen dapat menyebabkan terjadinya nilai amplitudo yang bervariasi. Nilai impedansi yang besar akan menghasilkan nilai amplitudo yang besar pula.
Menurut Gumbira (2011), nilai amplitudo diperoleh secara langsung berupa nilai hambur balik yang berasal dari dasar perairan sedangkan nilai
serta kehilangan energi akustik yang disebabkan karena penyebarannya oleh bidang-bidang reflektor yang permukaannya tidak teratur.
4.2.6 Sebaran Nilai Backscatter
Gelombang akustik yang dipancarkan ke kolom perairan akan kembali dan mengalami hamburan secara tidak beraturan. Hal ini dapat disebabkan oleh beberapa faktor seperti kondisi permukaan dasar perairan yang tidak teratur, tingkat kekasaran pada dasar perairan itu sendiri, penggunaan frekuensi suara pada alat yang digunakan dan grazing angle dari pulsa akustik (Burczynski, 2002). Hambur balik yang terjadi pada dasar perairan biasanya dikenal dengan istilah “Scattering Strength”.
Gambar 39. Sketsa pentulan sinyal akustik ketika menyentuh dasar perairan (Richardson dan Jackson, 2007)
Pemrosesan data backscatter membutuhkan proses yang lebih kompleks bila dibandingkan dengan analisis data kedalaman. Gavrilov et al. (2005) mengatakan bahwa terdapat dua pendekatan yang digunakan dalam
menginterpretasi data backscatter yang secara umum digunakan dalam melakukan klasifikasi dasar laut, yaitu Analysis Textural of Backscattering Imagedan
63
5.1 Kesimpulan
Kegiatan survei hidrografi yang telah dilakukan di sekitar wilayah barat daya Pulau Sumatera oleh BPPT dan beberapa peneliti dunia telah berhasil menemukan sebuah gundukan yang diindikasikan sebagai gunung bawah laut
(seamount). Ukuran yang dimiliki dari gunung ini relatif sangat besar. Letak dari gunung bawah tersebut berada pada jarak 320 kilometer dari kota Bengkulu, tepatnya berada pada koordinat 40 22’9,16’’ LS dan 990 25’ 01,47’’ BT. Tampilan terhadap bentuk dari gunung tersebut divisualisasikan dengan bantuan perangkat lunak
(software) Fladermaus 6.2.
Pengukuran terhadap dimensi gunung bawah laut dalam penelitian ini meliputi
tinggi, diameter, dan jumlah puncak, dan volume gunung. Berdasarkan hasil penelitian,
gunung bawah laut ini memiliki ketinggian ± 3.968 meter. Diameter gunung berdasarkan
hasil pengukuran yaitu ± 50.024 meter. Gunung tesebut diketahui memiliki dua
buah yang dipisahkan oleh sebuah kaldera dengan jarak ± 3.050 meter. Kedalaman celah antar puncak dari gunung tersebut ± 250 meter.
5.2 Saran
FAHRULIAN
SKRIPSI
DEPARTEMEN ILMU DAN TEKNOLOGI KELAUTAN
FAKULTAS PERIKANAN DAN ILMU KELAUTAN
Dengan ini saya menyatakan bahwa Skripsi yang berjudul :
DETEKSI KEBERADAAN GUNUNG BAWAH LAUT
(SEAMOUNT)
DAN DIMENSINYA MENGGUNAKAN
ECHOSOUNDER MULTIBEAM
DI PERAIRAN BENGKULU
adalah benar hasil karya sendiri dan belum diajukan dalam bentuk apapun kepada perguruan tinggi manapun. Semua sumber data dan informasi yang berasal atau dikutip dari karya yang diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka dibagian akhir skripsi ini.
Bogor, Agustus 2012
Dimensinya Menggunakan Echosounder Multibeam di Perairan Bengkulu. Dibimbing Oleh HENRY MUNANDAR MANIK dan DJOKO HARTOYO.
Informasi batimetri tidak hanya derguna untuk menggambarkan topografi dasar laut. Data batimetri juga dapat digunakan untuk menduga keberadaan suatu gunung bawah laut disuatu perairan. Keberadaan gunung bawah laut sangat penting untuk diketahui, hal ini bertujuan untuk mengantisipasi daerah yang berpotensi terhadap bencana meletusnya gunung api maupun bidang lainnya.
Penelitian ini dilakukan selama 5 bulan, yaitu pada bulan Maret-Juli 2012. Tujuan
penelitian ini untuk menduga keberadaan gunung bawah laut (seamount) dan melakukan
pengukuran terhadap dimensi seperti tinggi, diameter, dan jumlah puncak. Instrumen
akustik yang digunakan terdiri dari 2 yaitu: ELAC SeaBeam 1050D dengan frekuansi 50 kHz dan Simrad EM 12D dengan frekuensi 12 kHz. Survei batimetri dilakukan di perairan barat daya Pulau Sumatera, tepatnya di provinsi Bengkulu pada tanggal 18-19 Desember 2010. Akuisisi data dilakukan menggunakan perangkat lunak Hydrostar yang terdapat dalam Kapal Baruna Jaya 3 dan Kapal Baruna Jaya 4. Perangkat lunak (software) yang digunakan untuk mengolah data kedalaman adalah CARIS HIPS and SIPS 6.1. Data amplitudo dan backscatter
dari hasil kegiatan pemeruman diperoleh melalui pemrosesan data mentah pada MBSystem. Tampilan 3 dimensi gunung bawah laut diperoleh melalui perangkat lunak Fledermaus 6.2. Gunung bawah laut diasumsikan sebagai suatu objek yang bebrbentuk kerucut dengan alas elips untuk melakukan perhitungan terhadap dimensinya.
Hasil penelitian ini memberikan informasi mengenai keberadaan suatu objek yang diduga kuat sebagai gunung bawah laut (seamount) yang berjarak 320 Kilometer arah barat daya kota Bengkulu, tepatnya pada koordinat 4022’9,16’’ LS dan 990 25’ 01,47’’ BT. Tinggi gunung bawah laut ± 3.968 meter serta memiliki dua puncak yang dipisahkan oleh celah yang disebut kaldera pada jarak ± 3.050 meter. Puncak gunung berada pada kedalaman ± 1.270 meter. Diameter panjang
(major axis) gunung tersebut ± 50.240 meter dan diameter pendek (minor axis)
berdasarkan hasil pengukuran dari gunung tersebut yaitu ± 5.644 meter.
Multibeam Echosounder in Bengkulu’s Seas
SUPERVISED BY HENRY MANIK AND DJOKO HARTOYO
The research Detection of the Seamount Existence and Measuring
Dimensions by Using Multibeam Echosounder in Bengkulu’s Seas was conducted during 5 months from Maret until July 2012. The aim from this research is to guess the existence of seamount and measuring dimension such as height,
diameters, and number of peaks. There are two acoustic instruments used in this research, consisted of : ELAC Seabeam 1050D with a frequency of 50 kHz and Simrad EM 12D with a frequency of 12 kHz. Bathymetric survey conducted in southwest Sumatera island on 18-19 December 2010. Data acquisition was obtained by using the hydrostar software in Baruna Jaya III and Baruna Jaya IV vessel. CARIS HIPS and SIPS 6.1 used to get data of bathymetry. Amplitude and backscatter data obtained by processing on the MB System. Visualization of data is performed by using the Fladermaus 6.2 software thus obtained in 3D.
Seamount is assumed as a cone with an elliptical base to calculate the dimensions.
The result from this research is existence of an object that is allegedly as a seamount at 320 Kilometers from the southwest of Bengkulu city, precisely at 4022’9,16’’ southern latitude and 990 25’ 01,47’’ east longitude. The seamount height is ± 3.968 meters and has two peak separated by a gap called a caldera at ± 3.050 meters. The major axis is ± 50.240 meters and the minor axis in this seamount is ± 5.644 meters. Seamount peaks located at ± 1.270 meters below sea level. Based on the opinion of some geologists, the seamount is expressed as an inactive volcano
© Hak Cipta milik IPB, tahun 2012 Hak Cipta dilindungi Undang Undang
Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumbernya. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik atau tinjauan suatu masalah; dan pengutipan tersebut tidak merugikan kepentingan yang wajar IPB
FAHRULIAN
SKRIPSI
Sebagai salah satu syarat untuk memperoleh gelar Sarjana Ilmu Kelautan pada
Departemen Ilmu dan Teknologi Kelautan
DEPARTEMEN ILMU DAN TEKNOLOGI KELAUTAN FAKULTAS PERIKANAN DAN ILMU KELAUTAN
(SEAMOUNT) DAN DIMENSINYA MENGGUNAKAN
ECHOSOUNDER MULTIBEAM DI PERAIRAN BENGKULU
Nama Mahasiswa : Fahrulian Nomor Pokok : C54080038
Departemen : Ilmu dan Teknologi Kelautan
Menyetujui, Dosen Pembimbing
Dr. Ir. Henry M. Manik, M.T Ir. Djoko Hartoyo, M.Sc
NIP. 19701229 199703 1 008 NIP. 19681020 1994031 1 005
Mengetahui, Ketua Departemen
Prof. Dr.Ir. Setyo Budi Susilo. M.Sc NIP. 19580909 198303 1 003
sehingga penulis dapat menyelesaikan penyususnan skripsi dengan baik. Skripsi yang berjudul “Deteksi Keberadaan Gunung Bawah Laut dan Dimensinya Menggunakan Echosounder Multibeam di Perairan Bengkulu” ini dibuat
sebagai salah satu syarat untuk memperoleh gelar sarjana di Departemen Ilmu dan Teknologi Kelautan.
Penyusunan skripsi ini dapat selesai karena dukungan dari berbagai pihak. Pada kesempatan ini penulis ingin mengucapkan terimakasih kepada :
1. Kedua orang tua penulis, Drs. H. Ismail, M.Pd dan Hj. Erna Susilawati beserta keluarga yang tidak henti-hentinya memberikan doa dan dukungan kepada penulis.
2. Dr. Henry Manik, S.Pi., M.T dan Ir. Djoko Hartoyo, M.Sc selaku komisi pembimbing yang telah membantu dalam penelitian sehingga skripsi ini dapat terselesaikan dengan baik.
3. Bapak/Ibu dosen dan staf penunjang Departemen ITK atas bantuannya selama proses penyelesaian studi di IPB.
4. Badan Pengkajian dan Penerapan Teknologi (BPPT) yang telah memberikan kesempatan kepada penulis untuk menggunakan data Multibeam.
5. Badan Informasi Geospasial (BIG) yang telah memberikan kesempatan kepada penulis untuk menggunakan data pasang surut daerah Bengkulu. 6. Teman-teman, khususnya ITK angkatan 45. Penulis mengucapakan
Semoga skripsi ini dapat bermanfaat bagi semua pihak.
Bogor, Agustus 2012
i
2.1. Ketentuan International Hydrographic Organisation
ii
4.1.7. Sebaran Nilai Backscatter ... 50 4.2 PEMBAHASAN ... 53 4.2.1. Sound Velocity Profile (SVP) ... 53 4.2.2. Pasang Surut ... 55 4.2.3. Topografi Dasar Laut ... 56 4.2 4. Gunung Bawah Laut ... 59 4.2.5. Sebaran Nilai Amplitudo ... 60 4.2.6. Sebaran Nilai Backscatter ... 61
5. KESIPULAN DAN SARAN ... 63 5.1 Kesimpulan ... 63 5.2 Saran ... 63
DAFTAR PUSTAKA ... 64
iii
1. Prinsip pengukuran backscattering menggunakan multibeam sonar ... 7 2. Visualisasi sapuan multibeam ... 8 3. Jangkauan sapuan ELAC SeaBeam 1050D terhadap kedalaman
perairan ... 9 4. Konfigurasi linear transducer dan pola beam yang dihasilkan dari
sistem multibeam ... 10 15. Jalur survei kapal selama melakukan kegiatan sounding
dengan SeaBeam 1050D ... 26 16. Survei kapal selama melakukan kegiatan sounding dengan
Simrad EM 12D ... 27 17. Diagram alir pengolahan data multibeam pada
CARIS HIPS and SIPS 6.1 ... 29 18. Diagram alir pemrosesan data multibeam untuk memperoleh nilai
hambur balik (backscatter) dan amplitudo pada MBSystem ... 32 19. Asumsi bentuk gunung bawah laut. (a) bentuk kerucut
iv
Simrad EM 12D ... 35 23. Profile batimetri beberapa line survei menggunkan
ELAC SeaBeam 1050D ... 35 24. Tampilan 2D gunung bawah laut (seamount) di perairan
bengkulu dengan menggunakan Simrad EM 12D ... 39 25. Tampilan 2D gunung bawah laut (seamount) di perairan
bengkulu dengan menggunkan SeaBeam 1050D ... 40 26. Bentuk gunung bawah laut hasil pemeruman dengan
SeaBeam 1050D. (a) tampak depan dan (b) tampak atas ... 42 27. Bentuk gunung bawah laut hasil pemeruman dengan
Simrad EM 12D. (a) tampak depan dan (b) tampak atas ... 43 33. Sebaran nilai amplitudo di lokasi penelitian dengan
menggunakan SeaBeam 1050D ... 49 34. Sebaran nilai backscatter di lokasi penelitian dengan menggunakan
Simrad EM 12D ... 52 35. Hubungan antara suhu, Salinitas dan tekanan terhadap
kecepatan suara ... 54 36. Proses koreksi swath data multibeam pada perangkat lunak
CARIS HIPS and SIPS 6.1 ... 57 37. Proses koreksi altitude data multibeam pada perangkat lunak
v
Lampiran 1. Spesifikasi SeaBeam 1050D –multibeam sonar ... 68 Lampiran 2. Profil kapal baruna jaya IV ... 69 Lampiran 3. Spesifikasi coda octopus F 180 ... 70 Lampiran 4. Standar ketelitian kedalaman menurut IHO (International
Hydrographic Organization) ... 71 Lampiran 5. Data backscater Simrad EM 12D ... 73 Lampiran 6. Data amplitudo ELACSeaBeam1050D ... 82 Lampiran 7. Stasiun pengambilan data pasang surut ... 86 Lampiran 8. Data pasang surut perairan bengkulu pada