BAB I
PENDAHULUAN
1.1 Latar Belakang
Banyaknya kasus kecelakaan roda empat di Indonesia, diakibatkan oleh
dua faktor berbeda. Faktor pertama, diakibatkan oleh pengemudi yang tidak dapat
mengendalikan kendaraannya dikarenakan jalan licin, pengereman mendadak, dan
ban pecah. Faktor kedua, diakibatkan kendaraan yang belum menerapkan
teknologi sistem penyeimbang pada saat terjadi drifting pada sistem pengereman
dan steering.
Penelitian tugas akhir ini, memodelkan sistem kendaraan yang dapat
mengurangi terjadinya drifting. Sensor untuk mendeteksi proses terjadinya
drifting digunakan accelerometer dan gyroscope tipe MPU 6050. Drifting terjadi
akibat ban belakang tergelincir dengan alur yang lebih besar dari pada ban depan.
Perubahan data pada sensor yang diakibatkan perubahan gerak secara mendadak
akan direspon oleh mikrokontroller arduino leonardo. Selanjutnya mikrokontroller
akan mengendalikan steering dan rem agar mobil tidak terjadi drifting yang
berlebihan. Komponen steering dan rem dimodelkan dengan motor servo dc
standar.
Dari permasalahan tersebut maka dirancang suatu sistem yang dapat
membantu pengemudi untuk menstabilkan kendaraan secara otomatis pada saat
terjadi drifting sehingga kendaraan tidak lepas kendali, maka peneliti mengangkat
1.2 Identifikasi Masalah
Berdasarkan latar belakang yang telah dikemukakan, maka identifikasi
permasalahan dalam tugas akhir ini yaitu, dibutuhkan suatu sistem kendaraan
yang dapat mengurangi terjadinya drifting yang berlebihan untuk mengurangi
resiko kecelakaan.
1.3 Rumusan Masalah
Berdasarkan identifikasi masalah diatas, maka dapat didapatkan rumusan
masalah pada tugas akhir ini yaitu, bagaimana membuat suatu sistem kendaraan
yang dapat mengurangi drifting yang berlebihan pada saat terjadi perubahan gerak
secara mendadak.
1.4 Tujuan
Tujuan dari tugas akhir ini yaitu, membangun suatu sistem kendaraan yang
dapat membantu pengemudi untuk mengurangi drifting yang berlebihan pada saat
terjadi perubahan gerak secara mendadak.
1.5 Batasan Masalah
Beberapa batasan masalah yang didefinisikan oleh penulis sebagai
pembatasan “beban” penelitian adalah sebagai berikut.
Alat ini diuji cobakan pada mobil RC.
Sistem dimodelkan untuk kendaraan latihan mengemudi.
Sistem diuji pada lintasan yang luas sehingga tidak menimbulkan
tabrakan.
3
1.6 Metoda Penelitian
Metode penelitian yang dilakukan penulis adalah eksperimental dengan
tahapan sebagai berikut.
1. Tinjauan pustaka
Suatu metode pengumpulan data dengan membaca atau mempelajari
buku-buku yang berhubungan dengan masalah yang menjadi topik
dalam skripsi.
2. Survey
Proses pengamatan secara langsung terhadap permasalahan yang
dihadapi.
3. Pengumpulan data
Metode untuk mendapatkan data dari topik yang diambil dengan cara
mengajukan pertanyaan secara langsung kepada pihak-pihak yang
berkompeten mengenai hal-hal yang dipelajari selama pengerjaan
tugas akhir.
4. Pengolahan data
Proses untuk mengolah data-data yang didapat dari hasil pengumpulan
data, untuk dijadikan referensi dalam pengerjaan tugas akhir.
5. Perancangan
Mengaplikasikan teori yang didapat dari studi pustaka dan dari hasil
bimbingan, sehingga tersusun suatu perancangan sistem untuk bagian
6. Pembuatan
Merupakan tahap pengerjaan alat yang sebelumnya telah dirancang.
7. Pengujian
Merupakan metode untuk mengetahui hasil dari perancangan sistem
yang dibuat, uji coba dilakukan berkali-kali sehingga di dapatkan data
yang akurat, dilakukan pada bagian perangkat keras juga pada
perangkat lunak.
8. Analisa
Proses pendalaman terhadap alat yang dibuat apakah sudah berhasil
sesuai dengan yang direncanakan atau belum, selanjutnya akan
dilakukan pengujian baik secara teoritis ataupun praktis, dan jika
terdapat kekurangan maka akan dilakukan beberapa perbaikan sistem
sehingga akhirnya penulis dapat mengambil sebuah kesimpulan dari
penelitian ini.
1.7 Sistematika Penulisan Laporan
Sistematika penulisan skripsi ini disusun untuk memberikan gambaran
umum tentang penelitian yang dijalankan.Sistematika penulisan skripsi ini adalah
sebagai berikut.
BAB I PENDAHULUAN
Menguraikan latar belakang, identifikasi masalah, rumusan masalah,
tujuan, batasan masalah, kegunaan penelitian, metoda penelitian, dan
sistematika penulisan laporan yang digunakan dalam pembuatan laporan
5
BAB II DASAR TEORI
Bab ini berisi tentang teori-teori penunjang yang berkaitan dengan masalah
yang dibahas.
BAB III PERANCANGAN ALAT
Bab ini berisi tentang perancangan hardware maupun software dari sistem
yang akan dibuat.
BAB IV PENGUJIAN DAN ANALISIS
Bab ini berisi tentang hasil uji coba sistem, baik hardware maupun
software secara keseluruhan serta hasil analisanya.
BAB V PENUTUP
Bab ini berisi kesimpulan dari pembahasan serta analisa yang diperoleh,
untuk meningkatkan mutu dari sistem yang telah dibuat serta saran-saran
Pada bab ini berisi tentang teori mengenai permasalahan yang dibahas
dalam tugas akhir ini, dimulai dari definisi Sensor MPU6050, remote control (RX
dan TX), Arduino Leonardo, Pulse With Modulation (PWM), PID, motor servo,
LiquidCrystalDisplay (LCD), dan motor DC.
2.1 Sensor MPU 6050
Sensor MPU 6050 merupakan combo sensor antara accelerometer dan
gyroscope yang terintegrasi dalam satu chip. Sensor ini merupakan 6 axis motion
processing unit dengan penambahan regulator tegangan dan 3,3V sehingga bisa
langsung dihubungkan ke tegangan 5V. Sensor MPU 6050 memiliki dua buah
output yaitu SCL dan SDA.
7
Fitur yang ditawarkan sensor ini antara lain :
- Sensifitas accelerometer yang dapat dipilih mulai 2/4/8 sampai 16 g.
- Sensitifitas gyroscope yang dapat dipilih mulai 250/500/1000 sampai
2000 derajat/s .
- Range 16 bit untuk kedua sensor.
- Sensitivitas percepatan linier dari gyroscope 0,1 derajat/s
- Data rate output hingga 1000Hz, dilengkapi digital low pass filter
dan memiliki frekuensi sudut maksimum 256 Hz.
2.2 Remote Control (TX – RX)
Remote Control gelombang radio terdiri dari 2 bagian, yaitu pesawat
pemancar (TX) dan pesawat penerima (RX). Pada remote control ini digunakan
supaya mobil bergerak maju-mundur, belok ke kiri, belok ke kanan, dan sebagai
on/off sistem.
Remote control ini memiliki 3-channel dengan jangkauan 2,4GHz digital
radio dengan telemetri. Remote ini aktif pada tegangan input 4,4 V – 8,6 V.
2.3 Arduino Leonardo
Arduino Leonardo adalah papan mikrokontroler berbasis ATmega32u4.
Arduino Leonardo memiliki 20 digital pin input / output (yang mana 7 pin dapat
digunakan sebagai output PWM dan 12 pin sebagai input analog), 16 MHz kristal
osilator, koneksi mikro USB, jack power suplay tegangan, header ICSP, dan
tombol reset.
Gambar 2.3 Remote Control Track Star 46
9
Leonardo berbeda dari semua papan Arduino yang lainnya karena
ATmega32u4 secara terintegrasi (built-in) telah memiliki komunikasi USB.
Tabel 2.1 Spesifikasi Arduino Leonardo : Mikrokontroler ATmega32u4
Tegangan Operasi 5V
Input Voltage (disarankan) 7-12V
Input Voltage (limit) 6-20V Digital I/O Pin 20 pin
Channel PWM 7 pin
Input Analog 12 pin
Arus DC per pin I/O 40 mA Arus DC untuk pin 3.3V 50 mA
Flash Memory 32 KB (ATmega32u4) 4 KB digunakan bootloader
SRAM 2.5 KB (ATmega32u4) EEPROM 1 KB (ATmega32u4)
Clock Speed 16 MHz
Tabel 2.2 dibawah menunjukkan perbandingan Arduino Leonardo,
Arduino Uno, dan Arduino Mega.
Tabel 2.2 Uraian Perbandingan Jenis Arduino
Spesifikasi
Jenis Arduino Arduino Uno Arduino
Leonardo Arduino Mega
Flash memory 32 kb 32 kb 256 kb
SRAM 2 kb 2,5 kb 8 kb
I/O 14 32 54
Harga Rp. 185.000,00 Rp. 200.000,00 Rp. 585.000,00
2.3.1 Sumber Daya Arduino Leonardo
Arduino leonardo dapat diaktifkan melalui koneksi USB mikro atau
dengan catu daya eksternal. Sumber daya dipilih secara otomatis. Sumber daya
eksternal (non-USB) dapat berasal baik dari adaptor AC-DC atau baterai. Papan
20 volt. Jika diberi tegangan kurang dari 7 Volt, maka, pin 5 Volt mungkin akan
menghasilkan tegangan kurang dari 5 Volt dan ini akan membuat papan menjadi
tidak stabil. Jika sumber tegangan menggunakan lebih dari 12 Volt, regulator
tegangan akan mengalami panas berlebihan dan bisa merusak papan. Rentang
sumber tegangan yang dianjurkan adalah 7 Volt sampai 12 Volt.
Pin tegangan yang tersedia pada papan arduino leonardo adalah sebagai berikut:
Vin: Adalah input tegangan untuk papan arduino ketika menggunakan
sumber daya eksternal (sebagai ‘saingan’ tegangan 5 Volt dari koneksi
USB atau sumber daya ter-regulator lainnya). Anda dapat memberikan
tegangan melalui pin ini, atau jika memasok tegangan untuk papan
melalui jack power, kita bisa mengakses/mengambil tegangan melalui
pin ini.
5V: Tegangan listrik ter-regulator yang digunakan untuk daya
mikrokontroler dan komponen lainnya pada papan arduino. Tegangan
dapat menggunakan pin Vin melalui regulator on-board, atau dipasok
oleh USB atau power suplay lain dengan besar tegangan 5V ter-regulator.
3V3: Sebuah pin yang menghasilkan tegangan 3,3 Volt. Tegangan ini
dihasilkan oleh regulator yang terdapat pada papan (on-board). Arus
maksimum yang dihasilkan adalah 50 mA.
GND: Pin Ground atau Massa.
IOREF: Pin ini pada papan arduino berfungsi untuk memberikan
referensi tegangan yang beroperasi pada mikrokontroler (atau VCC untuk
11
2.3.2 Memori Arduino Leonardo
ATmega32u4 memiliki memori sebesar 32 KB (4 KB digunakan untuk
bootloader). Juga memiliki 2,5 KB SRAM dan 1 KB EEPROM (yang dapat
dibaca dan ditulis dengan perpustakaan EEPROM).
2.3.3 Input dan Output Arduino Leonardo
20 pin digital I/O pada Leonardo dapat digunakan sebagai input atau
output, menggunakan fungsi pin mode, digital write, dan digital read. Mereka
beroperasi pada tegangan 5 volt. Setiap pin dapat memberikan atau menerima
maksimum 40 mA dan memiliki resistor pull-up internal sebesar 20-50 kOhm
yang terputus secara default. Selain itu, beberapa pin memiliki fungsi khusus,
yaitu:
Serial: Pin 0 (RX) dan pin 1 (TX). Digunakan untuk menerima (RX) dan
mengirimkan (TX) data serial TTL menggunakan hardware
ATmega32U4 yang memiliki kemampuan serial didalamnya.
TWI: Pin 2 (SDA) dan pin 3 (SCL). Dukungan komunikasi TWI
menggunakan perpustakaan wire.
Eksternal Interupsi: Pin 3 (interrupt 0), pin 2 (interrupt 1), pin 0
(interrupt 2), pin 1 (interrupt 3) dan pin 7 (interrupt 4). Pin ini dapat
dikonfigurasi untuk memicu sebuah interupsi pada nilai yang rendah,
meningkat atau menurun, atau merubah nilai.
PWM: Pin 3, 5, 6, 9, 10, 11, dan 13. Menyediakan 8-bit output PWM
SPI: Pin pada header ICSP ini mendukung komunikasi SPI
menggunakan perpustakaan SPI. Perhatikan bahwa pin SPI tidak
terhubung ke salah satu pun pin digital I/O karena yang terhubung
langsung hanya pada arduino uno. Mereka hanya menyediakan konektor
ICSP. Ini berarti bahwa jika Anda memiliki shield yang menggunakan
SPI, tetapi tidak terdapat 6 pin konektor ICSP yang terhubung ke 6 pin
ICSP header arduino leonardo, maka shield tidak akan bekerja.
LED: Pin 13. Tersedia secara built-in pada papan Arduino ATmega2560.
LED terhubung ke pin digital 13. Ketika pin diset bernilai high, maka
LED menyala (on), dan ketika pin diset bernilai low, maka LED padam
(off).
Input Analog: Pin A0-A5, Pin A6 - A11 (pada pin digital 4, 6, 8, 9, 10,
dan 12). arduino leonardo memiliki 12 input analog, berlabel A0 sampai
A11, yang semuanya juga dapat digunakan sebagai digital I/O. Pin
A0-A5 terdapat di lokasi yang sama seperti pada arduino uno. Pin input
A6-A11 masing-masing ada pada digital I/O pin 4, 6, 8, 9, 10, dan 12.
Masing-masing pin menyediakan resolusi 10 bit (yaitu 1024 nilai yang
berbeda). Secara default pin ini dapat diukur/diatur dari mulai ground
sampai dengan 5 Volt, juga memungkinkan untuk mengubah titik
jangkauan tertinggi atau terendah mereka menggunakan pin AREF dan
13
Masih ada beberapa pin lainnya pada arduino leonardo, yaitu:
AREF: Referensi tegangan untuk input analog. Digunakan dengan fungsi
analog reference.
RESET: Jalur Low ini digunakan untuk me-reset (menghidupkan ulang)
mikrokontroler. Jalur ini biasanya digunakan untuk menambahkan
tombol reset pada shield yang menghalangi papan utama arduino.
2.4 Pulse Width Modulation (PWM)
PWM merupakan sebuah metoda untuk membangkitkan sinyal keluaran berupa pulsa yang periodenya berulang antara high atau low dimana kita dapat
mengontrol durasi sinyal high atau low sesua dengan yang kita inginkan. PWM
bisa dibangkitkan secara software maupun hardware, sehingga dapat dibentuk
gelombang dengan duty cycle yang dapat diatur sesuai dengan program.
Gambar 2.6 Sinyal PWM
Duty cycle merupakan perbandingan periode lamanya suatu sistem bernilai
logika high dan low. Variasi duty cycle ini memberikan harga tegangan rata–rata
yang berbeda–beda. Sinyal PWM dengan duty cycle yang besar memiliki nilai
rata-rata tegangan yang lebih besar dibandingkan dengan duty cycle kecil. Nilai
tegangan yang diberikan sebanding dengan nilai duty cycle yang diberikan.
Adapun rumus duty cycle, yaitu:
� � � = ℎ�� ℎ
( ℎ�� ℎ+ ���)× 100%...(2.1)
Sedangkan untuk menghitung nilai tegangan rata-rata output dapat dihitung
dengan rumus sebagai berikut:
�� = � � � �� ��...(2.2)
Dimana Vtotal merupakan tegangan yang diberikan untuk mengaktifkan motor.
2.5 Kendali Proportional - Integral - Derivative (PID)
PID merupakan kontroler untuk menentukan presisi suatu sistem
instrumentasi dengan karakteristik adanya umpan balik pada sistem tersebut.
Komponen kontrol PID ini terdiri dari tiga jenis yaitu proportional, integratif dan
derivatif. Ketiganya dapat dipakai bersamaan maupun sendiri-sendiri tergantung
dari respon yang kita inginkan terhadap suatu plant, sehingga
kelemahan-kelemahan pada salah satu komponen dapat ditutupi oleh komponen yang lain.
Komponen I dan D tidak dapat berdiri sendiri dan selalu dikombinasikan dengan
komponen P, menjadi pengontrol PI atau PID. Pengontrol PID akan mengeluarkan
aksi kontrol dengan membandingkan kesalahan atau error yang merupakan selisih
dari process variable dan setpoint, yang akan digunakan sebagai masukan
15
Secara umum bentuk persamaan pengontrol PID dapat dinyatakan oleh persamaan
2.3 berikut:
mv(t)= manipulated variable keluaran dari pengontrol PID
Kp = penguatan proporsional
Ti = waktu integral
Td = waktu derivatif
e(t) = error = setpoint– keluaran
2.5.1 Kendali Proportional
Kontrol P jika G(s) = kp, dengan k adalah konstanta. Jika u = G(s) • e
maka u = Kp • e dengan Kp adalah konstanta proporsional. Kp berlaku sebagai
Gain (penguat) saja tanpa memberikan efek dinamik kepada kinerja kontroler.
Penggunaan kontrol P memiliki berbagai keterbatasan karena sifat kontrol yang
tidak dinamik ini. Walaupun demikian dalam aplikasi-aplikasi dasar yang
sederhana kontrol P ini cukup mampu untuk memperbaiki respon transien
khususnya rise time dan settling time.
Pengaruh pada sistem :
1. Menambah atau mengurangi kestabilan.
2. Dapat memperbaiki respon transien khususnya : rise time, settling
time
3. Mengurangi (bukan menghilangkan) error steady state
2.5.2 Kendali Integrative
Jika G(s) adalah kontrol I maka u dapat dinyatakan sebagai =
[ . ]�� dengan Ki adalah konstanta integral, dan dari persamaan di atas, G(s)
dapat dinyatakan sebagai = � . ∅
∅ . Jika e(T) mendekati konstan (bukan
nol) maka u(t) akan menjadi sangat besar sehingga diharapkan dapat memperbaiki
error. Jika e(T) mendekati nol maka efek kontrol I ini semakin kecil. Kontrol I
dapat memperbaiki sekaligus menghilangkan respon steady-state, namun
pemilihan Ki yang tidak tepat dapat menyebabkan respon transien yang tinggi
sehingga dapat menyebabkan ketidakstabilan sistem. Pemilihan Ki yang sangat
tinggi justru dapat menyebabkan output berosilasi karena menambah orde sistem.
Pengaruh pada sistem :
1. Menghilangkan Error Steady State
2. Respon lebih lambat (dibandingkan dengan P)
3. Dapat menambah ketidakstabilan (karena menambah orde pada
sistem)
2.5.3 Kendali Derivative
Sinyal kontrol u yang dihasilkan oleh kontrol D dapat dinyatakan sebagai
� = .� . Dari persamaan di atas, tampak bahwa sifat dari kontrol D ini
dalam konteks "kecepatan" atau rate dari error. Dengan sifat ini, dapat digunakan
untuk memperbaiki respon transien dengan memprediksi error yang akan terjadi.
Kontrol derivative hanya berubah saat ada perubahan error sehingga saat error
statis kontrol ini tidak akan bereaksi, hal ini pula yang menyebabkan kontroler
17
Pengaruh pada sistem :
1. Memberikan efek redaman pada sistem yang berosilasi sehingga
bisa memperbesar pemberian nilai Kp.
2. Memperbaiki respon transien, karena memberikan aksi saat ada
perubahan error.
3. D hanya berubah saat ada perubahan error, sehingga saat ada error
statis D tidak beraksi. Sehingga D tidak boleh digunakan sendiri.
2.6 Motor Servo
Motor servo adalah sebuah motor DC dengan sistem umpan balik
tertutup dimana posisi rotornya akan diinformasikan kembali ke rangkaian kontrol
yang ada di dalam motor servo. Motor ini terdiri dari sebuah motor DC,
serangkaian gear, potensiometer, dan rangkaian kontrol. Potensiometer berfungsi
untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu
motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari
kabel motor. Pada motor servo biasanya terdapat tiga buah kabel, yang pertama
untuk tegangan masukkan, yang kedua untuk menerima sinyal PWM, dan yang
ketiga untuk ground.
Motor servo ini terbagi menjadi 2 jenis, yaitu :
a. Motor servo standard
Motor servo jenis ini hanya mampu bergerak dua arah (CW dan
CCW)
dengan defleksi masing-masing sudut mencapai 90° sehingga total
defleksi sudut dari kanan – tengah – kiri adalah 180°.
b. Motor servo continous
Motor servo jenis ini mampu bergerak dua arah (CW dan CCW) tanpa
batasan defleksi sudut putar (dapat berputar secara kontinyu).
Dari kedua jenis motor servo tersebut, metoda PWM dapat digunakan
untuk menentukan posisi sudut motor, hanya saja terdapat perbedaan pada
besarnya arah puataran motor.
Pada motor servo standard hanya dapat bergerak sebesar 180° yaitu dari
0°-180° atau (-90°)-90°. Secara umum untuk mengakses motor servo tipe standard
adalah dengan cara memberikan pulsa high selama 1,5 ms dan mengulangnya
setiap 20 ms, maka posisi servo akan berada ditengah atau netral (0°). Untuk pulsa
1 ms maka akan bergerak berkebalikan arah jarum jam dengan sudut -90°. Dan
pulsa high selama 2 ms akan bergerak searah jarum jam sebesar 90° seperti
19
Pengaturan pergerakan motor servo continous tidak jauh berbeda dengan
pengaturan pengendalian motor servo standard, secara umum untuk berputar
(rotasi) searah jarum jam harus diberi pulsa high selama 1,3 ms. Sedangkan untuk
berputar berlawanan arah jarum jam harus diberi logika high selama 1,7 ms. Jika
motor servo continous diberi pulsa high selama 1,5 ms maka akan berhenti. Pin
signal pada motor servo dapat dikoneksi ke pin mikrokontroler sebagai pengendali
dari pergerakan motor servo ini.
2.7 Liquid Crystal Display (LCD)
Liquid Crystal Display (LCD) adalah satu layar bagian dari modul peraga
yang menampilkan karakter yang diinginkan. Layar LCD menggunakan 2 buah
lembaran bahan yang dapat mempolarisasikan dan kristal cair diantara kedua
lembaran tersebut. Arus listrik yang melewati cairan menyebabkan kristal merata
sehingga cahaya tidak dapat melalui setiap kristal. Sehingga dapat mengubah
bentuk kristal cairnya membentuk tampilan angka atau huruf pada layar.
Dalam tugas akhir ini LCD character digunakan untuk menampilkan
informasi data sensor, data nilai PID, dan indikator nilai PWM,. Bentuk LCD
character 16x2 ini dapat dilihat pada gambar 2.9.
Gambar 2.9 16x2 Character LCD Module
2.8 Motor DC
Motor DC adalah mesin yang mengubah energi listrik arus searah menjadi
energi mekanis. Bentuk fisik motor DC dapat dilihat pada gambar 2.10.
Gambar 2.10 Motor DC
Cepat lambatnya motor DC dapat diatur berdasarkan duty cycle yang
diberikan, jika duty cycle pada sinyal PWM besar, maka akan menghasilkan
rata-rata tegangan yang besar pula sehingga motor DC akan berputar cepat, begitu juga
sebaliknya jika duty cycle yang diberikan kecil akan mengahasilkan tegangan
rata-rata yang kecil dan motor DC akan berputar lebih lambat.
2.9 Catu Daya (Baterai)
Baterai Lithium Polimer atau biasa disebut dngan LiPo merupakan salah
satu jenis baterai yang sering digunakan dalam dunia RC. Baterai ini bersifat cair
21
daya lebih cepat dan jenis baterai ini adalah hasil pengembangan dari Lithium Ion.
Baterai Li-Po ini disebut sebagai baterai ramah lingkungan.
Kelebihan Baterai Li-Po 1. Ramah lingkungan.
2. Memiliki kapasitas penyimpanan energi listrik yang besar.
3. Memiliki bobot yang ringan.
Kekurangan Baterai Li-Po
1. Baterai Li-Po menggunakan bahan elektrolit yang mudah terbakar.
2. Butuh perawatan khusus untuk isi ulang, seperti jangan sampai baterai
habis baru di isi ulang.
3. Usia baterai lebih pendek.
2.10 Ubec
UBEC 3A adalah mode switch DC/DC regulator, mengeluarkan voltase
Gambar 2.12 Ubec Spesifikasi :
Output voltage : 5V@3A atau 6V@3A (dipilih dengan menukarkan posisi
jumper)
Input : 5.5V 26V (2-6S Lipo atau 5-18 cells NiMH / NiCd)
Fitur :
Menggunakan IC yang canggih untuk switch mode DC-DC regulator
Voltase sangat konstan bahkan dapat bekerja dengan baterai LiPo 4S-6S
Dilindungi metal dan juga penyaring untuk memperkecil pengaruh
gelombang elektromagnetik
BAB III
PERANCANGAN ALAT
Perancangan yang baik dan dilakukan secara sistematik akan
memberikan kemudahan dalam proses pembuatan alat serta dapat mempermudah
dalam proses analisis dari alat yang dibuat. Pada bab ini akan dijelaskan tentang
perancangan sistem baik hardware maupun software beserta alasan pemilihan
komponen yang digunakan.
3.1 Perancangan Sistem
Pada perancangan sistem penyeimbang mobil pada saat drifting ini,
secara umum terdiri dari 3 bagian utama, yaitu masukan (input), proses, dan
keluaran (output). Setiap bagian dari sistem mempunyai fungsi masing-masing
yang akan saling berkaitan dalam sistem penyeimbang mobil pada saat drifting,
seperti terlihat pada gambar 3.1 dibawah.
Gambar 3.1 Blok Diagram Sistem Penyeimbang Mobil pada saat Drifting
Secara umum cara kerja dari sistem penyeimbang mobil pada saat
drifting ini adalah pertama-tama mendeteksi pergerakan laju mobil. Proses deteksi
sumbu accelerometer x dan gyroscope z. Jika terjadi perubahan gerak yang
mendadak dari mobil maka accelerometer x dan gyroscope z akan mendeteksi dan
akan memberi nilai masukan ke arduino. Selanjutnya akan dilakukan proses
pengolahan data menggunakan metode PID untuk menghitung selisih error.
Keluaran error yang sudah berupa PMW digunakan untuk memberi respon
terhadap posisi mobil.
Pada blok diagram terdapat 3 bagian utama dari sistem yaitu, pertama
masukan berupa data nilai accelerometer dan gyroscope dari sensor MPU 6050.
Kedua mikrokontroler yang akan memproses data masukan menggunakan
metode PID. Dan ketiga adalah keluaran berupa respon motor servo (steering dan
rem).
3.1.1 Perangkat Masukan (input)
Masukan (input) dari sistem ini terdiri dari sensor MPU 6050 dan
transmitter remote control.
a. Sensor MPU 6050
Sensor MPU 6050 merupakan sensor yang memiliki 2 sensor yaitu
accelerometer dan gyroscope yang terintegrasi dalam satu chip. Sensor
ini digunakan untuk mengetahui gerak mobil terhadap gerak
accelerometer x, y, z dan gerak gyroscope x, y, z. Dalam pengaplikasian
alat ini digunakan accelerometer x dan gyroscope z. Sensor MPU 6050
akan terus bekerja agar dapat mengetahui jika mobil terjadi perubahan
25
b. Transmitter
Transmitter digunakan untuk memberi perintah laju dan gerak mobil.
Alat ini berfungsi untuk memproses sinyal input agar dapat
ditransmisikan sesuai kanal yang diinginkan.
3.1.2 Perangkat Process
Perangkat proses dari sistem ini terdiri dari arduino leonardo dan
receiver remote control.
a. Arduino Leonardo
Arduino leonardo ini merupakan papan mikrokontroler berbasis
ATMega32u4. Arduino leonardo digunakan sebagai perangkat utama
untuk mengontrol sistem penyeimbang mobil pada saat terjadi drifting
dengan menggunakan metode PID. Arduino leonardo ini memproses
input dari sensor MPU 6050 dan memberikan keputusan output berupa
gerak steering dan rem dalam hal ini adalahmotor servo.
b. Receiver remote control
Receiver digunakan untuk menerima dan mengolah sinyal output
sehingga sesuai yang diperintahkan.
3.1.3 Perangkat Keluaran (output)
Perangkat keluaran merupakan hasil dari beberapa input yang telah
diproses pada bagian process. Pada blok diagram terlihat tiga buah output berupa
LCD, motor DC, dan motor servo. Berikut penjelasan dari masing-masing output
yang digunakan:
LCD digunakan untuk menampilkan data-data sensor. LCD yang
digunakan yaitu LCD 16x2 karakter.
b. Motor DC
Motor DC digunakan sebagai penggerak mobil maju atau mundur yang
diperintah dari remote control. Motor DC dan mikrokontroler
dihubungkan melalui modul L298 sebagai driver motor. Output yang
dihasilkan ke motor DC berupa keputusan mobil untuk maju atau
mundur.
c. Motor Servo
Motor servo digunakan sebagai steering dan penggerak rem pada mobil.
Input dari sensor MPU6050 ke mikrokontroler akan menghasilkan
output berupa besarnya sudut motor servo. Perubahan sudut motor servo
akan berganti selama proses penyeimbang mobil berlangsung.
3.2 Perancangan Perangkat Keras (Hardware)
Perancangan perangkat keras sistem penyeimbang mobil pada saat
drifting pada tugas akhir ini dimodelkan pada mobil-mobilan remote control.
Model RC yang dirancang memiliki 1 buah sensor MPU 6050 sebagai pendeteksi
perubahan gerak mendadak, 1 buah motor DC beserta driver ESC sebagai
penggerak mobil, 3 buah motor servo (1 buah untuk steering dan 2 buah untuk
penggerak rem), dan 1 buah arduino leonardo sebagai pusat pengendali mobil.
Perancangan sistem kontrol yang meliputi pembuatan
rangkaian-rangkaian elektronik yang saling terintegrasi membentuk sistem kendali dengan
27
Adapun detail hubungan antara perangkat input, proses, dan output seperti terlihat
pada wiring diagram dibawah.
Gambar 3.2 Wiring Diagram Sistem Penyeimbang Mobil
Dari diagram wiring diatas masing-masing komponen terintegrasi satu
dengan yang lain. Tabel 3.1 dibawah menggambarkan hubungan antara pin
arduino dengan perangkat input MPU 6050. Sensor MPU 6050 berfungsi
memberikan posisi accelerometer dan gyroscope pada arduino.
Tabel 3.1 Konfigurasi PIN Sensor MPU 6050 dengan Arduino
No Sensor MPU 6050 Arduino Leonardo
1 VCC 5V
2 GND GND
3 SDA SDA
4 SCL SCL
Tabel 3.2 dibawah menggambarkan antara pin arduino dengan perangkat
berupa frekuensi yang kemudian memberi perintah maju, mundur, kiri, kanan, dan
brake.
Tabel 3.2 Konfigurasi PIN Remote Control dengan Arduino
No Remote control Arduino Leonardo
1 Ch1 Pin 4
2 Ch2 Pin 5
3 Ch3 Pin 6
4 Ch4 Pin7
Tabel 3.3 dibawah menggambarkan hubungan antara pin arduino dengan
perangkat input LCD. LCD ini menunjukkan data sensor, data PID, data RC, dan
perintah peyimpanan data ke SD card.
Tabel 3.3 Konfigurasi PIN LCD dengan Arduino
No LCD Arduino Leonardo
1 K GND
2 A VCC
3 D7 8
4 D6 9
5 D5 10
6 D4 11
7 E 12
8 RS 13
Tabel 3.4 dibawah menggambarkan hubungan antara pin arduino dengan
SD Card yang digunakan untuk menyimpan semua data dari sistem penyeimbang
mobil pada saat drifting ini.
Tabel 3.4 Konfigurasi PIN SD Card denganArduino
No SD Card Arduino Leonardo
1 MOSI MOSI
2 MISU MISU
3 SCK SCK
4 CS A5
29
Tabel 3.5 dibawah menggambarkan hubungan antara pin arduino dengan
perangkat motor dan tombol. Motor yang digunakan yaitu motor DC standar yang
terhubung pada ESC dan 3 buah motor servo. 1 motor servo untuk steering dan 2
buah motor servo untuk rem.
Tabel 3.5 Konfigurasi PIN Arduino dengan Motor dan Tombol
No Arduino Leonardo Keterangan
1 A0 ESC (motor)
2 A1 Servo Steering
3 A2 Servo rem kiri
4 A3 Servo rem kanan
5 A4 Tombol/button
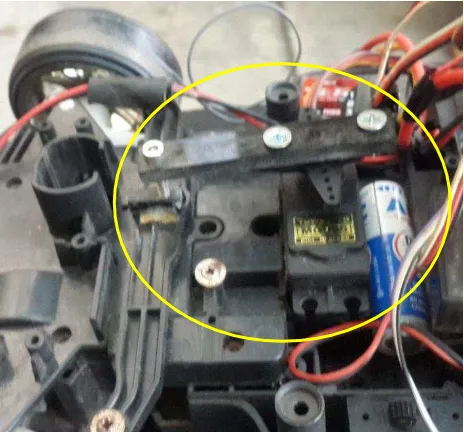
3.3 Implentasi Hardware
Implementasi hardware dari sistem ini terbagi menjadi beberapa bagian
yang meliputi, implementasi remote control, implementasi power supply (baterai),
implementasi Arduino Leonardo, implementasi sensor MPU 6050 (accelerometer
dan gyroscope), implementasi servo steering, implementasi servo rem,
implementasi dan motor DC, implementasi media penyimpanan data, dan
implementasi LCD. Bentuk fisik dari protoype penyeimbang mobil pada saat
drifting ditunjukkan pada gambar 3.3 dibawah.
Gambar 3.3 Prototype Penyeimbang Mobil pada saat Drifting 1
2
3 4 5
6 7
Bagian-bagian hardware pada protoype sistem penyeimbang mobil pada
saat drifting yaitu:
1. Remote control
2. Modul penerima radio frekuensi dari remote control
3. Motor servo steering
4. Driver motor
5. Sensor MPU 6050 (accelerometer & gyroscope)
6. LCD
7. SD card
8. Motor servo rem
3.3.1 Implementasi Catu Daya
Semua komponen pada sistem ini mempunyai kebutuhan daya antara 5V
smpai 7,4V. Catu daya untuk menyuplai daya servo, motor, dan board arduino.
Atas dasar kebutuhan daya tersebut, maka cukup digunakan baterai dengan
kapasitas 3000 mAh seperti pada gambar 3.4 dibawah.
31
3.3.2 Implementasi Sistem Minimum Arduino Leonardo
Sistem minimum Arduino Leonardo menggunakan mikrokontroler
ATMega32u4. Arduino terhubung dengan komponen yang lain, antara lain sensor
MPU 6050, motor servo steering, motor servo rem, driver motor, tombol, remote
control, LCD, dan sd card. Untuk konfigurasi pin dari mikrokontroler dapat
dilihat di tabel 3.1 sampai tabel 3.5. Tampilan papan Arduino Leonardo
ditunjukkan pada gambar 3.5 dibawah.
Gambar 3.5 Papan Arduino Leonardo yang Terhubung Kebeberapa Komponen 3.3.3 Implementasi Sensor MPU 6050
Sensor MPU 6050 merupakan combo sensor antara accelerometer dan
gyroscope yang terintegrasi dalam satu chip. Sensor MPU 6050 memiliki dua
buah output yaitu SCL dan SDA. Pin SCL terhubung ke pin SCL pada Arduino
dan pin SDA terhubung ke pin SDA pada Arduino. Bentuk fisik sensor Arduino
Gambar 3.6 Tampilan Sensor MPU 6050 (Accelerometer dan Gyroscope) 3.3.4 Implementasi Motor Servo Steering
Motor servo pada steering membutuhkan daya 5V. Motor servo steering
akan bekerja setelah menerima pulsa dari remote control. Motor servo ini akan
bergerak 45° ke kiri dan 45° ke kanan. Motor servo steering terhubung ke pin A1
pada Arduino. Motor servo yang terpasang pada protoype penyeimbang mobil
pada saat drifting dapat dilihat pada gambar 3.7 dibawah.
33
3.3.5 Implementasi Motor Servo Rem
Motor servo rem terdapat dua buah motor servo yang terdiri motor servo
rem kiri dan motor servo rem kanan. Motor servo rem kiri terhubung ke pin A2
dan motor servo kanan terhubung ke pin A3 papan Arduino. Motor servo rem
akan bekerja pada sistem automatis. Motor servo ini akan aktif jika terjadi drifting
dan akan melakukan pengereman pada roda yang memiliki gaya gesek yang besar.
Servo rem kiri dan kanan diam pada nilai PWM 1500. Servo rem kiri bekerja jika
ada nilai input PWM 1300. Servo rem kanan akan bekerja jika ada nilai input
PWM 1700. Gambar 3.8 dibawah menunjukkan motor servo rem yang telah
terpasang.
Gambar 3.8 Tampilan Motor Servo Rem 3.3.6 Implementasi Motor DC
Motor DC pada perancangan dan implementasi prototype penyeimbang
mobil pada saat drifting, berfungsi sebagai penggerak maju dan mundur prototype
mobil. Motor DC bergerak jika diberi sinyal dari remote control. Cepat lambatnya
motor DC, diatur berdasarkan duty cycle yang diberikan. Jika duty cycle pada
sehingga motor DC akan berputar cepat. Begitu juga sebaliknya, jika duty cycle
yang diberikan kecil akan menghasilkan tegangan rata-rata yang kecil dan motor
DC akan berputar lebih lambat. Pada implementasinya, motor akan diam pada
nilai PWM 1300. Motor akan bergerak maju jika input nilai PWM lebih besar dari
1300 dan akan bergerak mundur pada nilai input PWM kurang dari 1300.
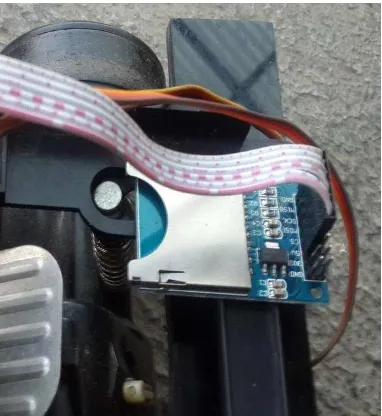
Gambar 3.9 Tampilan motor DC 3.3.7 Implementasi Media Penyimpanan Data
Media penyimpanan data yang digunakan yaitu modul sd card. Sd card
ini digunakan untuk mendapatkan data sensor, motor servo steering¸ motorservo
rem, dan data dari remote control selama sistem aktif. Pin yang terhubung ke
papan Arduino dapat dilihat pada tabel 3.4. Gambar 3.10 dibawah menampilkan
35
Gambar 3.10 Tampilan modul sd card
3.3.8 Implementasi LCD
LCD yang dipakai yaitu 16x2 karakter. LCD digunakan untuk
menampilkan data sensor, data nilai PID, dan nilai PWM dari remote. Pin LCD
yang terhubung ke pin Arduino dapat dilihat pada tabel 3.3. Untuk baris pertama
menunjukkan data sensor gyroscope x, y, z. Dan baris kedua menunjukkan data
sensor accelerometer x, y, z. Dibawah ini adalah gambar LCD yang terpasang
pada prototype mobil.
Tidak
Tidak
Tidak Tidak
Ya
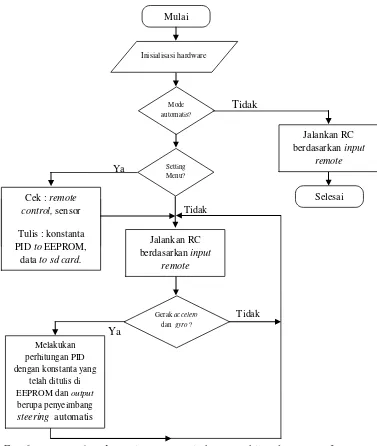
Ya 3.4 Perancangan Software
Perancangan perangkat lunak (software) bertujuan untuk menentukan
setiap alur eksekusi dari perangkat sistem penyeimbang mobil pada saat drifting.
Setiap input akan diterima dan diproses oleh software yang nantinya akan
menentukan output dari sistem. Berikut alur kerja (flowchart) dari sistem yang
dirancang.
Gambar 3.12 Flowchart Sistem Penyeimbang Mobil pada saat Drifting Mulai
Inisialisasi hardware
Mode automatis?
Setting Menu?
Jalankan RC
berdasarkan input
remote
Jalankan RC
berdasarkan input
remote
Cek : remote
control, sensor
Tulis : konstanta
PID to EEPROM,
data to sd card.
Jalankan RC
berdasarkan input
remote
Gerak accelero
dan gyro ?
Melakukan perhitungan PID dengan konstanta yang
telah ditulis di EEPROM dan output
berupa penyeimbang steering automatis
37
Dari flowchart diatas, sistem dihidupkan kemudian akan
menginisialisasi hardware.Jika tidak menggunakan mode automatis maka sistem
akan menggunakan mode manual dimana RC bergerak sesuai input remote. Jika
memilih mode automatis maka akan muncul setting menu. Setting menu antara
lain cek input remote, cek sensor aktif atau tidak, apakah akan melakukan seting
konstanta PID atau tidak, dan apakah akan menyimpan data ke sd card atau tidak.
Jika sudah RC akan bergerak sesuai input remote. Sensor accelerometer dan
gyroscope akan mengambil data dari pergerakan RC. Jika terjadi perubahan gerak
mendadak pada RC, maka akan melakukan perhitungan menggunakan kontrol
PID.
3.4.1 Algoritma
Perancangan algoritma perangkat lunak merupakan tahap pengkodean
antara perangkat input, output terhadap sistem kendali proses (arduino) yang akan
digunakan untuk program penyeimbang mobil pada saat drifting. Perancangan
coding pada sistem prototype penyeimbang mobil ini bisa dilihat pada halaman
Pada bab ini dibahas mengenai pengujian dan analisa dari sistem yang
telah dibuat. Pengujian meliputi implementasi algoritma PID pada hardware yang
bertujuan untuk mengetahui respon sistem pada saat terjadi drifting. Pengujian
hardware pada lintasan datar meliputi pengujian manual, pengujian menggunakan
kontrol PD, PI, dan PID.
4.1 Pengujian Hardware
Tahapan pengujian hardware meliputi pengujian algoritma PD, PI, dan
PID. Berikut penjelasan data hasil pengujian, seperti pada table dan grafik
dibawah ini.
4.1.1 Pengujian Sistem Manual
Pengujian menggunakan sistem manual diujicobakan karena untuk
melihat seberapa besar tingkat drifting yang dapat dilihat dari data sensor accelero
x dan gyroscope z yang di kendalikan oleh pengemudi. Selanjutnya akan diketahui
waktu untuk kembali ke posisi lurus.
Tabel 4.1 Pengujian Sistem Manual
39
Tabel 4.1 diatas merupakan data dari prototype mobil penyeimbang
mobil pada saat drifting. Data yang diperolah antara lain data nilai accelero x,
gyroscope z,servo steering, servo rem kiri, dan servo rem kanan. Nilai accelero
akan berubah-ubah sesuai pergerakan mobil kekiri atau kekanan. Untuk nilai
accelero nilai pada saat diam tidak pasti karena tergantung pada kemiringan dan
berubah ketika ada hentakan atau perubahan gerak secara mendadak. Ketika
prototype mobil berjalan lurus, nilai dari servo steering yaitu 1700. Sedangkan
untuk nilai servo rem kiri dan servo rem kanan dalam keadaan diam yaitu 1500.
Pada tabel 4.1 nilai accelero x yaitu 7, 6, 37, -13 dan seterusnya
menunjukkan pergerakan mobil dan pergeseran mobil terhadap sumbu x. Nilai
gyroscope z yaitu 0, 0, -5, -6, dan seterusnya menunjukkan perubahan gerak mobil
secara mendadak. Nilai gyroscope bernilai negatif jika pergerakan mobil berputar
berlawanan dengan arah jarum jam dan akan bernilai positif jika searah jarum
jam. Servo steering pada tabel 4.1 diperoleh nilai 1695, 1700,1611,1607, dan
seterusnya. Saat nilai servo 1700, servo steering bergerak lurus. Jika nilai servo
steering dibawah 1700, mobil berbelok ke kiri dan jika servo bernilai diatas 1700,
maka mobil berbelok ke kanan.
Gambar 4.1 menunjukkan grafik respon sensor gyroscope z. Sensor
mendeteksi adanya perubahan gerak yang mendadak pada waktu ke 156 ms dan
lurus kembali pada waktu ke 2028 ms. Pengujian sistem secara manual bisa
-300 -250 -200 -150 -100 -50 0 50 100
52
156 260 364 468 572 676 780 884 988
1092 1196 1300 1404 1508 1612 1716 1820 1924 2028
G
yro
sc
o
p
e
z
Time (ms)
41
waktu 1872 ms. Perubahan gyroscope z ke nilai negatif karena mobil berputar
berlawanan arah jarum jam.
Gambar 4.2 diatas menggambarkan grafik respon steering pada saat
terjadi drifting. Pada proses steering ini menggunakan mode manual atau
dikendalikan oleh pengemudi. Pada saat terjadi drifting sampai kembali stabil
membutuhkan waktu 1924 ms.
4.1.2 Pengujian Sistem Menggunakan Kendali PD
Pengujian menggunakan algoritma PD dilakukan untuk membandingkan
hasil output yang di dapat dari pengambilan data sensor pada prototype mobil
RC. Adapun pengaturan nilai Kp = 42 dan Kd = 12. Berikut tabel 4.2, gambar 4.3
dan 4.4 menjelaskan respon sensor dan steering hasil pengujian menggunakan
kontrol PD.
1300 1400 1500 1600 1700 1800
52
156 260 364 468 572 676 780 884 988
1092 1196 1300 1404 1508 1612 1716 1820 1924 2028
St
e
e
ri
n
g
Time (ms)
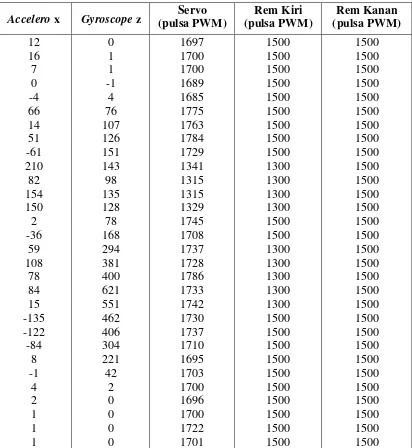
Tabel 4.2 Pengujian Sistem Menggunakan Kendali PD
Tabel 4.2 diatas menunjukkan hasil pengambilan data sistem automatis
menggunakan kontrol PD. Data gyroscope z menunjukkan nilai 4, 76, 107, dan
seterusnya, menunjukkan bahwa prototype mobil terjadi drifting ke arah kiri atau
43
membantu mengurangi putaran roda yang berlebihan agar posisi mobil cepat
kembali lurus. Pada saat rem kiri aktif maka servo akan bernilai 1300.
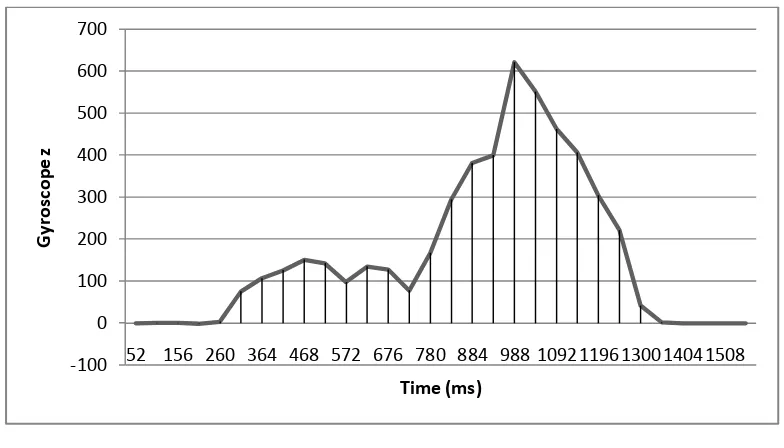
Dari grafik respon sensor gyroscope z diatas, drifting terjadi pada waktu
ke 260 ms dan dapat stabil pada waktu ke 1404 ms. Sehingga membutuhkan
waktu 1144 ms untuk memperbaiki drifting ke posisi stabil atau lurus kembali.
Gambar 4.4 Grafik Respon Steering terhadap Waktu Menggunakan Kendali PD
-100 0 100 200 300 400 500 600 700
52 156 260 364 468 572 676 780 884 988 1092 1196 1300 1404 1508
G
yro
sc
o
p
e
z
Time (ms)
0 200 400 600 800 1000 1200 1400 1600 1800 2000
52 156 260 364 468 572 676 780 884 988 1092 1196 1300 1404 1508
St
e
e
ri
n
g
Time (ms)
Dari grafik respon steering diatas, menghasilkan respon steering selama
1196 ms. Sistem mendeteksi adanya drifting pada wawktu ke 260 ms dan dapat
kembali stabil pada waktu ke 1352 ms. Respon steering menggunakan kontrol PD
tidak terjadi osilasi yang sangat besar.
4.1.3 Pengujian Sistem Menggunakan Kendali PI
Pengujian menggunakan algoritma PI dilakukan untuk membandingkan
hasil output yang di dapat dari pengambilan data sensor pada prototype mobil
RC. Adapun pengaturan nilai Kp = 42 dan Ki = 22. Berikut tabel 4.3, gambar 4.5
dan 4.6 menjelaskan respon sensor dan steering hasil algoritma PI.
Tabel 4.3 Pengujian Sistem Menggunakan Kendali PI
45
Accelero x 17
1
Gyroscope z 0 0
Servo (pulsa PWM)
1693 1699
Rem Kiri (pulsa PWM)
1500 1500
Rem Kanan (pulsa PWM)
1500 1500
Tabel 4.3 menunjukkan hasil data pengujian sistem menggunakan kontrol
PI. Dapat terlihat dari data gyroscope z, bahwa ketika terjadi drifting sistem
dengan cepat memperbaiki error. Akan tetapi terjadi overhoot yang ditunjukkan
dari nilai gyroscope z yang awalnya positif berubah ke nilai negatif.
Respon sensor pada gambar 4.5 diatas terjadi pada waktu ke 156 ms dan
kembali lurus pada waktu ke 1196 ms. Sistem dapat menyeimbangkan prototype
mobil dalam waktu 1040 ms. Kontrol PI memberikan respon sistem yang baik,
tetapi terjadi overshoot dan masih terjadi osilasi.
Gambar 4.5 Grafik Respon Sensor Gyroscope z terhadap Waktu Menggunakan Kendali PI
-100 -50 0 50 100 150
G
y
ro
sc
o
p
e
z
Gambar 4.6 diatas menujukkan respon steering yang cepat pada saat
terjadi error. Pada waktu ke 52 ms, sistem mendeteksi error dan kembali stabil
pada waktu ke 1248. Jadi waktu yang dibutuhkan sebanyak 1196 ms untuk
kembali ke posisi stabil menggunakan kontrol PI.
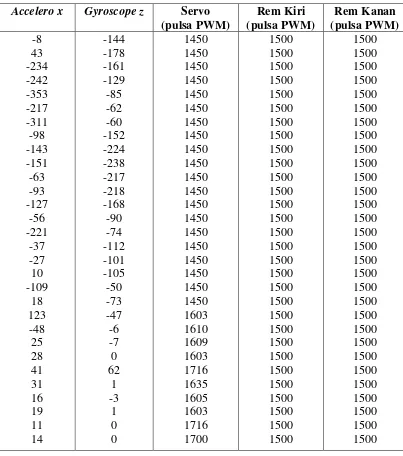
4.1.4 Pengujian Sistem Menggunakan Kendali PID
Pengujian menggunakan algoritma PID dilakukan untuk membandingkan
hasil output yang di dapat dari pengambilan data sensor pada prototype mobil
RC. Adapun pengaturan nilai Kp = 42, Ki = 22, dan Kd = 12. Berikut tabel 4.4,
gambar 4.7 dan 4.8 menjelaskan respon sensor dan steering hasil pengujian sistem
menggunakan kontrol PID.
1500 1550 1600 1650 1700 1750 1800 1850
52
104 156 208 260 312 364 416 468 520 572 624 676 728 780 832 884 936 988
1040 1092 1144 1196 1248 1300 1352
S
te
e
ri
n
g
Time (ms)
47
Tabel 4.4 Pengujian Menggunakan Kendali PID
Accelero x Gyroscope z (pulsa PWM) Servo (pulsa PWM) Rem Kiri (pulsa PWM) Rem Kanan
mengetahui berapa waktu yang dibutuhkan sistem memperbaiki posisi dapat
dilihat digambar 4.7 dan 4.8 dibawah.
Gambar 4.7 Grafik Respon Gyroscope terhadap Waktu Menggunakan Kendali PID
Dari gambar 4.7 dapat dilihat bahwa mobil mulai tidak stabil pada waktu
ke 208 ms dan kembali pada keadaan stabil pada waktu ke 1508 ms. Sehingga
membutuhkan waktu 1300 ms untuk membuat mobil ke keadaan stabil. Dan dari
grafik respon gyroscope z diatas hanya sedikit osilasi yang terjadi.
Gambar 4.8 Grafik Respon Steering terhadap Waktu Menggunakan Kendali PID Gambar 4.8 diatas menunjukkan grafik respon steering menggunakan
kontrol PID. Sistem mulai terjadi drifting pada waktu ke 156 ms dan mulai stabil
pada waktu ke 1352 ms. Sehingga membutuhkan waktu 1196 ms untuk
memperbaiki posisi mobil mejadi stabil kembali.
1300 1400 1500 1600 1700 1800
St
e
e
ri
n
g
Time (ms)
-250 -200 -150 -100 -50 0 50
G
yr
o
sc
o
p
e
z
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan hasil perancangan dan pengujian serta analisis data dari
sistem penyeimbang mobil pada saat drifting yang dibahas pada penulisan laporan
tugas akhir ini, dapat diambil beberapa kesimpulan yang berkaitan dengan hasil
analisis data yang mengacu kepada tujuan perancangan dan implementasi
prototype penyeimbang mobil pada saat drifting ini.
1. Respon pengujian sistem secara manual membutuhkan waktu yang lama
untuk membuat mobil stabil kembali karena tidak dibantu dengan steering
dan rem automatis. Pengujian sistem secara manual membutuhkan waktu
2028 ms.
2. Respon pengujian sistem menggunakan kontrol PD membutuhkan waktu
1144 ms untuk kembali ke posisi stabil. Sistem menggunakan kontrol PD,
ketika terjadi drifting langsung menurunkan error namun responnya
lambat dan masih terjadi osilasi.
3. Respon pengujian sistem menggunakan kontrol PI membutuhkan waktu
1040 ms. Sistem mengunakan kontrol PI memiliki respon yang cepat
untuk menurukan error, namun bisa terjadi overshoot dan osilasi.
4. Respon pengujian sistem menggunakan kontrol PID membutuhkan waktu
1300 ms untuk kembali ke posisi stabil. Pengujian menggunakan kontrol
PID relatif tidak terjadi osilasi namun membutuhkan waktu agak lama
5.2 Saran
Untuk pengembangan dan peningkatan lebih lanjut dari perancangan dan
implementasi prototype penyeimbang mobil pada saat drifting ini ada beberapa
point yang perlu diperhatikan dalam perancangannya.
1. Untuk pengembangan lebih lanjut, sebaiknya menggunakan
mekanik yang lebih baik khususnya pada bagian steering.
2. Sensor gyroscope memiliki nilai bias, sebaiknya ditambahkan
LAPORAN TUGAS AKHIR
PERANCANGAN DAN IMPLEMENTASI PROTOTYPE
PENYEIMBANG MOBIL PADA SAAT
DRIFTING
Laporan ini disusun untuk memenuhi salah satu syarat kelulusan menempuh
pendidikan program Sarjana di Program Studi Teknik Elektro
Oleh :
AMIRUDIN FANANI
1.31.10.017
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
Nama : Amirudin Fanani
Tempat, Tanggal Lahir : Madiun,
Jenis Kelamin : Laki-laki
Agama : Islam
Alamat Asal : Perum. Bumi Mojopurno Indah Jalan Mojo Asri Blok B.0 nomor 66, Madiun – Jawa Timur Nomor Telepon : [Handphone] 082226166687
E-mail : [email protected]
2010 – 2016 : Teknik Elektro, Universitas Komputer Indonesia 2007 – 2010 : SMA Negeri 4 Madiun
2004 – 2007 : SMP Negeri 10 Madiun
1998 – 2004 : SD Negeri 1 Mangkujayan Ponorogo 1996 – 1998 : TK Pembina Ponorogo
2013 : Kerja Praktek di PT. Perusahaan Listrik Negara (PLN) Region Ponorogo
IDENTITAS DIRI
PENDIDIKAN FORMAL
DAFTARISI
Halaman LEMBAR PENGESAHAN... i ABSTRAK... ii ABSTRACT... iii KATA PENGANTAR... v DAFTAR ISI... vii DAFTAR GAMBAR... x DAFTAR TABEL... xii BAB I. PENDAHULUAN... 1
1.1Latar Belakang... 1
1.2Identifikasi Masalah... 2
1.3Rumusan Masalah... 2
1.4Tujuan... 2
1.5Batasan Masalah... 2
1.6Metoda Penelitian... 3
1.7Sistematika Penulisan Laporan... 4
BAB II. LANDASAN TEORI... 6 2.1Sensor MPU 6050... 6
2.2Remote Control (TX-RX)... 7
2.3Arduino Leonardo... 8
2.4Pulse Width Modulation (PWM)... 13
2.5KendaliProportional - Integral - Derivative (PID)... 14
2.5.1 KendaliProportional... 15
2.5.2 KendaliIntegrative... 16
2.5.3 KendaliDerivative... 16
2.6Motor Servo... 17
2.7Liquid Crystal Display (LCD)... 19
2.8Motor DC... 20
2.9Catu Daya (Baterai)... 20
2.10 Ubec... 21
BAB III. PERANCANGAN ALAT... 23 3.1Perancangan Sistem... 23
3.1.1 Perangkat Masukan (input)... 24
3.1.2 Perangkat Process... 25
3.1.3 PerangkatKeluaran (output)... 25
3.2Perancangan Perangkat Keras (Hardware)... 26
3.3Implementasi Hardware... 29
3.3.1 Implementasi Catu Daya... 30
3.3.2 Implementasi Sistem Minimum Arduino Leonardo... 31
3.3.3 Implementasi Senso MPU 6050... 31
3.3.5 Implementasi Motor Servo Rem... 33
3.3.6 Implementasi Motor DC... 33
3.3.7 Implementasi Media Penyimpanan Data... 34
3.3.8 Implementasi LCD... 35
3.4 Perancangan Software... 36
3.4.1 Algoritma... 37
BAB IV. PENGUJIAN DAN ANALISIS... 38
4.1 Pengujian hardware... 38
4.1.1 Pengujian Sistem Manual... 38
4.1.2 Pengujian Sistem Menggunakan Kendali PD... 41
4.1.3 Pengujian Sistem Menggunakan Kendali PI... 44
4.1.4 Pengujian Sistem Menggunakan Kendali PID... 46
BAB V. KESIMPULAN DAN SARAN... 49
5.1 Kesimpulan... 49
5.2 Saran... 50
Gambar 2.1 Sensor MPU 6050... 6
Gambar 2.2 Cara Kerja Sensor terhadap Axis x, y, z... 7
Gambar 2.3 Remote control Track Star 46... 8
Gambar 2.4 Arduino Leonardo... 8
Gambar 2.5 Pemetaan Pin Arduino Leonardo... 13
Gambar 2.6 Sinyal PWM... 13
Gambar 2.7 Motor Servo... 17
Gambar 2.8 Sinyal Kontrol Motor Servo... 19
Gambar 2.9 16x2 Character LCD Module... 20
Gambar 2.10 Motor DC... 20
Gambar 2.11 Baterai Li-Po... 21
Gambar 2.12 Ubec... 22
Gambar 3.1 Blok Diagram Sistem... 23
Gambar 3.2 Wiring diagram sistem... 27
Gambar 3.3 Prototype Penyeimbang Mobilpada saat Drifting... 29
Gambar 3.4 Tampilan Baterai sebagai Sumber Daya Prototype Mobil... 30
Gambar 3.5 Papan Arduino Leonardo yang Terhubung Kebeberapa Komponen... 31
Gambar 3.6 Tampilan Sensor MPU 6050... 32
Gambar 3.7 Motor Servo Steering... 32
Gambar 3.9 Tampilan Motor DC... 34
Gambar 3.10 Tampilan Modul Sd Card... 35
Gambar 3.11 Tampilan LCD 16x2 Karakter... 35
Gambar 3.12 Flowchart Sistem... 36
Gambar 4.1 Grafik Respon SensorGyroscope z terhadap Waktu Menggunakan Sistem Manual... 40
Gambar 4.2 Grafik Respon Steeringterhadap WaktuMenggunakan Sistem Manual... 41
Gambar 4.3 Grafik Respon Sensor Gyroscope z terhadap WaktuMenggunakan Kendali PD... 43
Gambar 4.4 Grafik Respon Steering terhadap Waktu MenggunakanKendali PD... 43
Gambar 4.5 Grafik Respon Sensor Gyroscope z terhadap Waktu Menggunakan Kendali PI... 45
Gambar 4.6 Grafik Respon Steering terhadap WaktuMenggunakanKendali PI... 46
Gambar 4.7 Grafik Respon Gyroscopeterhadap Waktu Menggunakan Kendali PID... 48
Tabel 2.1 Spesifikasi Arduino Loenardo... 9
Tabel 2.2 Uraian Perbandingan Jenis Arduino... 9
Tabel 3.1 Konfigurasi PIN Sensor MPU 6050 dengan Arduino... 27
Tabel 3.2 Konfigurasi PIN Remote Control dengan Arduino... 28
Tabel 3.3 Konfigurasi PIN LCD dengan Arduino... 28
Tabel 3.4 Konfigurasi PIN SD Card dengan Arduino... 28
Tabel 3.5 Konfigurasi PIN Arduino dengan Motor dan Tombol... 29
Tabel 4.1 Pengujian Sistem Manual... 38
Tabel 4.2 PengujianSistem Menggunakan Kendali PD... 42
Tabel 4.3 Pengujian Sistem Menggunakan Kendali PI... 44
DAFTAR PUSTAKA
[1] Hidayat, Rahmat, Rancang Bangun Sistem Penstabil Kamera Untuk Foto Udara
Berbasis Wahana Udara Quadcopter
[2] Kompasiana, teknologi mengenal system keselamatan pada mobil. [Online]
Avalaible:teknologi.kompasiana.com/otomotif/2014/08/14/mengenal-sistem-keselamatan-pada-mobil-680181.html
[3] Accelerator and gyroscope. [Online]. Available:http://siska-theanalyst.
blogspot.com/2012/05/accelerator-and-gyroscop.html
[4] Keseimbangan Robot Menggunakan Sensor GyroGS-12 danAccelerometer
DE-ACCM3D
[5] Axis gyroscope-accelerometer [Online].
Available:http://www.vcc2gnd.com/2014/02/mpu-6050-6-axis-gyroscope
Amirudin Fanani
Universitas Komputer Indonesia
Jl. Dipati Ukur No. 112, Bandung
Email : [email protected]
Abstrak
Prototype penyeimbang mobil pada saat drifting memodelkan sistem kendaraan yang dapat mengurangi terjadinya drifting. Sensor untuk mendeteksi proses terjadinya drifting digunakan accelerometer dan gyroscope tipe MPU 6050. Drifting terjadi akibat ban belakang tergelincir dengan alur yang lebih besar dari pada ban depan. Perubahan data pada sensor yang diakibatkan perubahan gerak secara mendadak akan direspon oleh mikrokontroller arduino leonardo. Selanjutnya mikrokontroller akan mengendalikan steering dan rem agar mobil tidak terjadi drifting yang berlebihan. Komponen steering dan rem dimodelkan dengan motor servo dc standar.
Kata Kunci : Accelerometer, Gyroscope, Drifting, PID, Penyeimbang mobil pada saat drifting
I. PENDAHULUAN
Banyaknya kasus kecelakaan roda empat di Indonesia, diakibatkan oleh dua faktor berbeda. Faktor pertama, diakibatkan oleh pengemudi yang tidak dapat mengendalikan kendaraannya dikarenakan jalan licin, pengereman mendadak, dan ban pecah. Faktor kedua, diakibatkan kendaraan yang belum menerapkan teknologi sistem penyeimbang pada saat terjadi drifting pada sistem pengereman dan steering. Seperti kasus kecelakaan yang dialami Dul putra musisi Ahmad Dhani, dari hasil olah tempat kejadian perkara yang dilakukan pihak kepolisian di lokasi kecelakaan, mobil Mitsubishi Lancer yang dikendarai Dul tergelincir karena terdapat jejak ban yang membekas di jalan. Penelitian tugas akhir ini, memodelkan sistem kendaraan yang dapat mengurangi terjadinya drifting. Sensor untuk mendeteksi proses terjadinya drifting digunakan accelerometer dan gyroscope tipe MPU 6050. Drifting terjadi akibat ban belakang tergelincir dengan alur yang lebih besar dari pada ban depan. Perubahan data pada sensor yang
akan direspon oleh mikrokontroller arduino leonardo. Selanjutnya mikrokontroller akan mengendalikan steering dan rem agar mobil tidak terjadi drifting yang berlebihan. Komponen steering dan rem dimodelkan dengan motor servo dc standar. Dari permasalahan tersebut maka dirancang suatu sistem yang dapat membantu pengemudi untuk menstabilkan kendaraan secara otomatis pada saat terjadi drifting sehingga kendaraan tidak lepas kendali,
maka peneliti mengangkat judul “Perancangan
dan Implementasi Prototipe Penyeimbang Mobil Pada Saat Drifting” sebagai tema dari Tugas Akhir ini.
II. LANDASAN TEORI
A. Sensor MPU 6050
tegangan 5V. Sensor MPU 6050 memiliki dua buah output yaitu SCL dan SDA.
Gambar 1. Sensor MPU 6050 – 3 axis accelerometer
+ 3 axis gyroscope
B. Arduino Leonardo
Arduino Leonardo adalah papan mikrokontroler berbasis ATmega32u4. Arduino Leonardo memiliki 20 digital pin input/output (yang mana 7 pin dapat digunakan sebagai output PWM dan 12 pin sebagai input analog), 16 MHz kristal osilator, koneksi mikro USB, jack power suplay tegangan, tegangan operasi 5V, flash memory 32 KB, SRAM 2,5 KB,header ICSP, EEPROM 1 KB, dan tombol reset
.
Gambar 2 Arduino Leonardo
C. Pulse Width Modulation (PWM)
PWM merupakan sebuah metoda untuk membangkitkan sinyal output berupa pulsa yang periodanya berulang antara high atau low dimana kita dapat mengontrol duraasi sinyal high atau low sesuai dengan yang kita inginkan. PWM bias dibangkitkan secara software maupun hardware, sehingga dapat dibentuk gelombang dengan duty cycle yang dapat diatur sesuai
dengan program. Duty cycle merupakan perbandingan periode lamanya suatu sistem bernilai logika high atau low. Variasai duty cycle ini memberikan harga tegangan rata-rata yang berbeda-beda.
Gambar 3. Sinyal PWM
D. Kendali PID
PID merupakan kontroller untuk menentukan presisi suatu sistem instrumentasi dengan karakteristik adanya umpan balik pada system tersebut. Komponen control PID ini terdiri dari tiga jenis yaitu proportional, integrative, dan derivative. Ketiganya dapat dipakai bersamaan maupun ssendiri-sendiri tergantung dari respon yang kita inginkan terhadap suatu plant, sehingga kelemahan-kelemahan pada salah satu komponen dapat ditutupi oleh komponen yang lain. Komponen I dan D tidak dapat berdiri sendiri dan selalu dikombinasikan dengan komponen P, menjadi pengontrol PI atau PID. Pengontrol PID akan mengeluarkan aksi kontrol dengan membandingkan kesalahan atau error yang merupakan selisih dari proses variable dan set point, yang akan digunakan sebagai input pengontrol untuk mengeluarkan sinyal kontrol.
E. Motor Servo
Gambar 4. Motor Servo
F. Liquid Crystal Display (LCD)
Liquid Crystal Display (LCD) adalah satu layar bagian dari modul peraga yang menampilkan karakter yang diinginkan. Layar LCD menggunakan 2 buah lembaran bahan yang dapat mempolarisasikan dan kristal cair diantara kedua lembaran tersebut. Arus listrik yang melewati cairan menyebabkan kristal merata sehingga cahaya tidak dapat melalui setiap kristal. Sehingga dapat mengubah bentuk kristal cairnya membentuk tampilan angka atau huruf pada layar.
Gambar 5. 16x2 Character LCD Module
G. Motor DC
Motor DC adalah mesin yang mengubah energi listrik arus searah menjadi energi mekanis. Cepat lambatnya motor DC dapat diatur berdasarkan duty cycle yang diberikan, jika duty cycle pada sinyal PWM besar, maka akan menghasilkan rata-rata tegangan yang besar pula sehingga motor DC akan berputar cepat, begitu juga sebaliknya jika duty cycle yang diberikan kecil akan
Gambar 6. Motor DC
H. Catu Daya (Baterai)
Baterai Lithium Polimer atau biasa disebut dngan LiPo merupakan salah satu jenis baterai yang sering digunakan dalam dunia RC. Baterai ini bersifat cair (Liquid), menggunakan elektrolit polimer yang padat, dan mampu menghantarkan daya lebih cepat dan jenis baterai ini adalah hasil pengembangan dari Lithium Ion. Baterai Li-Po ini disebut sebagai baterai ramah lingkungan.
Gambar 7. Baterai Li-Po
I. Ubec
UBEC 3A adalah mode switch DC/DC regulator, mengeluarkan voltase yang konstan dan aman untuk receiver, gyro dan servo. Tegangan Output Ubec yaitu 5 Volt atau 6 Volt. Tegangan Input 5,5 V- 26 V.