IMAN ABDURRAHMAN
SKRIPSI
DEPARTEMEN ILMU DAN TEKNOLOGI KELAUTAN
FAKULTAS PERIKANAN DAN ILMU KELAUTAN
PERNYATAAN MENGENAI SKRIPSI DAN SUMBER
INFORMASI
Dengan ini saya menyatakan bahwa Skripsi yang berjudul:
RANCANG BANGUN PROTOTIPE INSTRUMEN PENGUKUR
ARUS PERMUKAAN BERBASIS AKUSTIK
Adalah benar merupakan hasil karya sendiri dan belum diajukan dalam bentuk apapun kepada perguruan tinggi manapun. Semua sumber data dan informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi.
Bogor,
Arus Permukaan Berbasis Akustik. Dibimbing oleh INDRA JAYA Pembuatan dan perancangan instrumen acoustic current meter (ACM) dilaksanakan pada bulan Juni 2011 hingga Maret 2012 di Workshop Akustik dan Instrumentasi Kelautan, Departemen Ilmu dan Teknologi Kelautan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor. Uji coba alat dilakukan di Laboratorium Flume Tank Departemen Pemanfaatan Sumberdaya Perikanan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor.
Instrumen ini dirancang dengan suatu sistem elektronik (sensor ultrasonik) yang disesuaikan dengan sifat arus yang akan diamati. Sistem terdiri dari beberapa unit fungsional yang secara keseluruhan terdiri dalam satu
mikrokontroler (mikrokontroler keluarga AVR seri ATmega32). Pengukuran kecepatan arus menggunakan hasil pantulan nilai jarak dari ke empat sensor ultrasonik (modul sensor SRF02).
Rancang bangun ACM dilakukan dalam beberapa tahapan: pembuatan disain, perancangan konstruksi mekanik, konstruksi elektronik, pengembangan perangkat lunak sehingga tahapan terakhir adalah integrasi dari keseluruhan proses perancangan tersebut.
Rangkaian elektronik ACM yang dibuat ditempatkan pada bagian
kompartemen dengan mempergunakan mikrokontroler ATmega32 sebagai pusat processing data dan tegangan. Pada proses pembuatan ACM juga dirancang perangkat lunak, dimana bahasa pemrograman yang digunakan adalah bahasa C dan Compiler yang digunakan adalah Code Vision AVR C Compiler 2.05.0. Hasil dari penelitian ini menunjukkan bahwa pengukuran yang dilakukan secara manual pada semua kecepatan memiliki hasil pengukuran yang lebih besar dibandingkan dengan hasil pengukuran dari instrumen ACM. Data yang
Hak cipta dilindungi
IMAN ABDURRAHMAN
SKRIPSI
Sebagai Salah Satu Syarat untuk Memperoleh Gelar Sarjana Ilmu Kelautan pada Fakultas Perikanan dan Ilmu Kelautan
Institut Pertanian Bogor
DEPARTEMEN ILMU DAN TEKNOLOGI KELAUTAN FAKULTAS PERIKANAN DAN ILMU KELAUTAN
Judul Skripsi : RANCANG BANGUN PROTOTIPE INSTRUMEN PENGUKUR ARUS PERMUKAAN BERBASIS AKUSTIK
Nama Mahasiswa : Iman Abdurrahman Nomor Pokok : C54070036
Departemen : Ilmu dan Teknologi Kelautan
Menyetujui, Pembimbing Utama
Prof. Dr. Ir. Indra Jaya, M. Sc. NIP. 19610410 198601 1 002
Mengetahui, Ketua Departemen
Prof. Dr. Setyo Budi Susilo,M.Sc NIP. 19580909 198303 1 003
Darsono dan ibu bernama Khuzaemah. Penulis merupakan anak pertama dari dua bersaudara. Pada tahun 2007 penulis
menyelesaikan pendidikan Sekolah Menengah Atas Islam Cipasung. Pada tahun yang sama penulis diterima di
Departemen Ilmu dan Teknologi Kelautan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor melalui jalur Undangan Seleksi Masuk IPB (USMI). Semasa kuliah penulis aktif baik dalam organisasi maupun kegiatan
kemahasiswaan. Pada tahun 2008-2009 aktif dalam Dewan Perwakilan Mahasiswa FPIK IPB sebagai anggota Komisi I Internal, pada tahun 2009-2010 aktif dalam Dewan Perwakilan Mahasiswa FPIK IPB sebagai Ketua Komisi IV Controlling, pada tahun 2010-2011 aktif dalam Badan Eksekutif Mahasiswa KM IPB sebagai Direktur Leadership and Entrepreneurship School dan Direktur Internal PPSDM. Penulis juga
pernah menjadi ketua Loka Karya Kemahasiswaan FPIK 2008 serta menjadi wakil ketua Orientasi Mahasiswa Baru FPIK IPB 2010.
Penulis juga pernah menjadi Koordinator asisten mata kuliah Dasar-dasar Instrumentasi Kelautan tahun 2009/2011, Koordinator asisten mata kuliah
Puji dan syukur penulis ucapkan kehadirat Allah SWT atas limpahan rahmat, hidayah serta inayah sehingga skripsi ini dapat diselesaikan. Skripsi yang berjudul “RANCANG BANGUN PROTOTIPE INSTRUMEN PENGUKUR
ARUS PERMUKAAN BERBASIS AKUSTIK” diajukan sebagai salah satu
syarat memperoleh gelar Sarjana Ilmu Kelautan pada Fakultas Perikanan dan Ilmu Kelautan.
Dalam kesempatan ini penulis ingin mengucapkan terima kasih kepada : 1. Ayah dan ibu, Nur Nudhar Azizah beserta seluruh keluarga besar yang tak
henti-hentinya dukungan, doa dan nasihat kepada penulis.
2. Prof. Dr. Indra Jaya selaku komisi pembimbing yang telah membantu penulis dalam penyelesaian tugas akhir.
3. Dr. Ir Totok Hestirianoto, M.Sc selaku pembimbing akademik selama penulis menuntut ilmu di Departemen ITK-IPB.
4. Dr Ir Yuli Naulita M.Si selaku dosen penguji tamu pada ujian sidang akhir. 5. Bapak/Ibu dosen dan staf pununjang Departemen Ilmu dan Teknologi
Kelautan atas ilmu dan bantuan yang telah diberikan selama penulis menyelesaikan studi di IPB.
6. Dewan Pembina dan Pengurus Yayasan Karya Salemba Empat, PT Bank Mandiri, Tbk serta donator lainnya yang telah memberikan beasiswa hingga penulis dapat menyelesaikan studi di IPB
ii
8. Hollanda Arief Kusuma, Anugrah Adityayuda serta rekan-rekan
seperjuangan ITK 44 dan seluruh warga ITK yang tidak dapat disebutkan satu persatu.
9. Seluruh personil MIT (Marine Instrumentation and Telemetry) yang tidak henti-hentinya memberikan dukungan.
10. Keluarga besar Badan Eksekutif Mahasiswa KM IPB, Leadership and Entrepreneur School IPB atas dukungan dalam penyelesaian studi di IPB.
Penulis menyadari bahwa skripsi ini masih jauh dari kesempurnaan, oleh karena itu saran dan kritik sangat diharapkan demi kesempurnaan skripsi ini. Akhir kata penulis berharap agar skripsi ini berguna bagi sendiri maupun orang lain.
Bogor, Juni 2012
iv
3.6 Rancang Bangun Perangkat Keras ... 17
3.6.1 Pembuatan Mekanik ... 17
3.6.2 Pembuatan Rangkaian Elektronik ... 18
3.7 Rancang Bangun Perangkat Lunak ... 20
3.7.1 Diagram Alir Program ... 22
3.7.2 Pemrograman Mikrokontroler ... 25
3.8 Penyatuan Seluruh Perangkat ... 25
3.9 Pengujian Kinerja Acoustic Current Meter ... 25
3.9.1 Pengujian Kinerja Sensor SRF02 ... 26
3.9.2 Pengujian Integrasi Sensor SRF02 ... 26
3.9.3 Pengambilan dan Pengujian Data ACM ... 27
4. HASIL DAN PEMBAHASAN ... 29
4.1 Desain ... 30
4.2 Perangkat Keras ... 32
4.3 Perangkat Lunak ... 34
4.3.1 Program Register Modul Sensor SRF02 ... 34
4.3.2 Program Mikrokontroler ... 35
4.4 Uji Coba Sensor ... 38
4.4 Uji ACM01 ... 39
5. KESIMPULAN DAN SARAN ... 43
DAFTAR PUSTAKA ... 44
v
DAFTAR GAMBAR
Halaman
Gambar 1. Contoh bentuk instrumen pengukur arus
secara mekanik ... 4
Gambar 2. Macam-macam bentuk instrumen pengukur arus secara acoustic ... 6
Gambar 3. Unsur-unsur fungsional sistem pengukuran ... 7
Gambar 4. Konfigurasi kaki pada mikrokontroller ATmega 32 ... 9
Gambar 5. Sensor SRF02 ... 11
Gambar 6. Skema i2c communication protocol ... 12
Gambar 7. Desain sistem pengolahan dan distribusi catu daya dan data ... 15
Gambar 8. Diagram alir perancangan instrumen ACM ... 16
Gambar 9. Tampilan Google Sketch Up 7 ... 17
Gambar 10. Tata ruang sensor ACM ... 17
Gambar 11. Konfigurasi sensor SRF02 ... 19
Gambar 12. Tampilan Code Vision AVR C Compiler 20.5 ... 21
Gambar 13. Satu set kabel data seri K-125 ... 21
Gambar 14. Rancangan program register modul SRF02 ... 23
Gambar 15. Rancangan program yang diunduh pada mikrokontroler ATmega 32 ... 24
Gambar 16. Skema pengujian kinerja sensor ... 26
Gambar 17. Proses pengukuran arus menggunakan ACM01 pada Flume Tank ... 28
Gambar 18. Rancangan Desain 3D ACM01 ... 30
vi
Gambar 20. Tata letak kompartemen ACM01 ... 31
Gambar 21. Bentuk 3D ACM01 serta penempatan kompartemen elektronik ... 32
Gambar 22. Unit ACM01 ... 33
Gambar 23. Letak Modul Sensor SRF02 ... 34
Gambar 24. Grafik hasil pengamatan ACM01 (18,45 cm/det) ... 41
Gambar 25. Grafik hasil pengamatan ACM01 (24,33 cm/det) ... 41
vii
DAFTAR TABEL
Halaman
Tabel 1. Register SRF02 ... 11
Tabel 2. Daftar alat yang digunakan ... 13
Tabel 3. Daftar bahan yang digunakan ... 14
Tabel 4. Prosedur perintah dalam SRF02 ... 38
Tabel 5. Konfigurasi alamat modul SRF02 ... 38
Tabel 6. Nilai sensor diukur dari titik tengah objek ... 38
viii
DAFTAR LAMPIRAN
Halaman
Lampiran 1. Data pengamatan kecepatan 1 ... 46
Lampiran 2. Data pengamatan kecepatan 2 ... 48
Lampiran 3. Data pengamatan kecepatan 3 ... 51
Lampiran 4. Data hasil pengukuran ... 56
Lampiran 5. Datasheet mikrokontroler ATmega32A ... 57
Lampiran 6. Datasheet Modul SRF02 ... 58
Lampiran 7. Kode program register modul SRF02 Code Vision AVR 2.05 ... 59
Lampiran 8. Kode program mikrokontroller ATmega32 Code Vision AVR 2.05 ... 61
1.
PENDAHULUAN
1.1. Latar Belakang
Sebagian besar permukaan bumi diselimuti oleh perairan. Begitu juga dengan wilayah Negara Kesatuan Republik Indonesia yang berbentuk kepulauan. Wilayah perairan Indonesia adalah sekitar 70% dari total luas wilayahnya.
Arus laut adalah gerakan massa air dari satu tempat ke tempat lain baik secara vertikal (atas atau bawah) maupun secara horizontal (samping). Arus laut membawa percampuran dari berbagai tipe pergerakan air, baik periodik maupun aperiodik dengan skala yang luas dan besar, serta berhubungan dengan kecepatan dan waktu. Varibilitas dari kecepatan dan arah arus laut adalah karakteristik yang mempengaruhi gerak arus.
Pengukuran kecepatan arus secara manual dapat dilakukan dengan
menghanyutkan benda terapung yang terikat dan dihitung jarak tempuh dan waktu yang dibutuhkannya, sedangkan untuk arah arus dilakukan dengan pengamatan arah pada kompas terhadap terhadap arah regangan pengikat. Alat pengukur arus secara makanik mengukur kecepatan arus yang dihasilkan dari perputaran rotor. Alat ini bekerja secara mekanik, yaitu badan air yang bergerak memutar baling – baling yang dihubungkan dengan sebuah roda gigi. Pada roda gigi tersebut terdapat penghitung (counter) dan pencatat waktu (time-keeper) yang merekam jumlah putaran untuk setiap satuan waktu. Melalui suatu proses kalibrasi, jumlah putaran per satuan waktu yang dicatat dari alat ini dikonversi ke kecepatan arus dalam meter per detik (m/s).
Alat untuk mengukur arah dan kecepatan arus serta gelombang secara elektronik diantaranya current meter dan Acoustic Current Meter (ACM).
Pengukuran arus secara manual membutuhkan peran manusia sehingga kemungkinan terjadi human error yang relatif besar. Selain itu pengukuran secara manual tersebut, banyak membuang waktu sehingga kurang efektif dan efisien. Saat ini, instrumen pengukuran arus laut di Indonesia memiliki harga yang relatif sangat mahal dan juga merupakan barang import. Salah satu solusi yang tepat dan mudah adalah membuat suatu alat ukur dengan sistem elektronik.
1.2. Tujuan Penelitian
2. TINJAUAN PUSTAKA
2.1 Arus Laut dan Metode Pengukurannya
Arus merupakan gerakan mengalir suatu massa air yang dapat disebabkan oleh tiupan angin, perbedaan densitas air laut atau dapat pula disebabkan oleh gerakan periodik jangka panjang yang disebabkan oleh aktivitas fisika air laut tersebut (Nontji 1987). Menurut Gross (1972) arus laut adalah proses pergerakan massa air laut yang menyebabkan perpindahan horizontal dan vertikal massa air tersebut yang terjadi secara terus menerus. Kecepatan arus merupakan konversi dari waktu yang dibutuhkan oleh pergerakan massa air dengan perbandingan antara jarak dengan waktunya.
Arus merupakan campuran rumit dari berbagai jenis gerakan periodik dan aperiodik, mulai dari berbagai skala ukuran, kecepatan dan waktu. Varibilitas kecepatan dan arah arus laut merupakan salah satu karakteristik yang paling menonjol. Arus dapat ditunjukkan secara vektor, yang menampilkan hubungan antara arah dan kecepatan arus laut. Rata-rata dapat diambil secara rataan vektor atau rataan skalar.
Metode pengukuran yang biasa digunakan adalah metode pengukuran secara insitu. Pada pengukuran arus secara insitu, digunakan metode Eularian yang merupakan pengukuran arus pada suatu titik yang tetap. Alat pengukur arus yang sederhana adalah menggunakan free-floating drogued bouy untuk mengukur kecepatan dan kompas bidik untuk mendapatkan arah dari arus tersebut. Metode yang juga dikembangkan dalam pengukuran arus yaitu
dikembangkan dengan metode ‘laglarian’. Salah satunya yaitu penggunaan drifter bouy sebagai alternatif dari metode ‘eularian’ yang mengkonversi jarak perpindahan berbanding terbalik dengan waktu perpindahannya.
.
2.1.1 Pengukuran Arus Dengan Cara Mekanik
Current Meter mekanik (Gambar 1) adalah alat ukur arah dan kecepatan arus, dimana badan air yang bergerak memutar baling – baling yang dihubungkan dengan sebuah roda gigi. Pada roda gigi tersebut terdapat penghitung (counter) dan pencatat waktu (time-keeper) yang merekam jumlah putaran untuk setiap satuan waktu. Melalui suatu proses kalibrasi, jumlah putaran per satuan waktu yang dicatat dari alat ini dikonversi ke kecepatan arus dalam meter per detik (m/s).
Gambar 1. Contoh bentuk instumen pengukur arus secara mekanik (sumber: ICSM, 2012)
badan air sampai dengan 1 mm/s. Kini, telah berkembang current meter yang bekerja secara elektronik dan mempunyai kemampuan perekaman data yang sangat besar salah satunya yaitu digital current meter. Indikator kinerja tergantung pada inertia dari rotor, gerakan air, dan gesekan dalam bearing.
2.1.2 Pengukuran Arus Dengan Cara Akustik
Di dalam air terdapat material-material padat yang tersuspensi (sedimen, plankton) dan bergerak bersama arah dan kecepatan yang sama dengan arus. Jika gelombang akustik dengan frekuensi dan intensitas tertentu dibangkitkan dan ditembakkan ke suatu kolam, maka material-material padat tersuspensi pada lapisan air yang diukur akan menghamburkan gelombang yang ditembakkan tersebut kembali ke pembangkit (tranduser). Material penghambur bergerak relatif terhadap sumber gelombang, maka frekuensi gelombang akan mengalami efek Doppler. Jika perbedaan frekuensi gelombang pantul relatif terhadap gelombang pancar diketahui, maka kecepatan relatif antara pembangkit
gelombang dengan lapisan air yang diukur semakin dapat dihitung. Kelebihan alat ukur akustik mempunyai sifat tidak mengganggu badan air yang diukur
Gambar 2. Macam-macam bentuk instrumen pengukur arus secara akustik (Sumber : OOT ADC, 2008)
Instrumen yang biasa digunakan dengan pengukuran arus secara akustik adalah Acoustic Current Meter (ACM), Acoustic Doppler Profiler (ADP),
Acoustic Doppler Current Meter (ADCM) dan Acoustic Doppler Current Profiler (ADCP).
2.2 Konsep Umum Alat Ukur
Gambar 3. menunjukkan unsur-unsur fungsional sistem pengukuran dalam bentuk diagram.
Gambar 3. Unsur-unsur fungsional sistem pengukuran (Sumber : Sivastava, 1987)
Unsur penginderaan pertama adalah unsur pertama yang menerima energi dari medium yang diukur dan menghasilkan keluaran dalam batas-batas tertentu tergantung pada kuantitas yang diukur. Kuantitas yang diukur selalu terganggu oleh tindakan pengukuran, menyebabkan suatu pengukuran yang sempurna adalah mustahil.
Unsur penkonversi peubah, jika diperlukan dapat menukar keluaran dari unsur penginderaan primer dengan peubah yang lebih cocok, sedangkan informasi dalam peubah sebelumnya tetap disimpan.
Unsur manipulasi peubah secara spesifik menimbulkan perubahan-perubahan nilai numerik sesuai aturan tertentu sehingga mempertahankan sifat fisik peubah. Suatu penguat operasional elektronik dapat mengilustrasikan konsep ini. Hasil keluaran mempunyai satuan sama dengan sinyal masukan tetapi dengan besaran yang berbeda beberapa kali dari masukan.
Informasi yang telah diolah perlu dikirimkan dan disajikan oleh unsur pengiriman data dan unsur penyaji data kepada operator untuk tujuan pemantauan, pengendalian atau analisis.
2.3 Konstruksi Acoustic Current Meter 2.3.1 Mikrokontroler
Mikrokontroler adalah sebuah sistem microprocessor yang didalamnya sudah terdapat CPU, ROM, RAM, I/O, clock dan peralatan internal lainnya yang sudah saling terhubung dan terorganisasi dengan baik oleh pabrik serta dikemas dalam satu chip yang siap digunakan. Salah satu contoh mikrokontroler yang ada adalah produksi ATmel keluarga AVR seri ATmega 32.
ATmega merupakan mikrokontroler 8-byte dengan arsitektur RISC,
Gambar 4. Konfigurasi kaki pada mikrokontroller ATmega 32 (Sumber: ATMEL, 2011)
2.3.2 Sensor Transduser
Sensor dan transduser memiliki persamaan makna dimana perangkat tersebut berfungsi untuk melakukan konversi energi dari besaran fisik (misalnya tekanan) menjadi besaran elektronik (misalnya arus dan tegangan), seperti halnya dalam proses pengukuran, kontrol, ataupun kebutuhan informasi. Pada prinsipnya sensor dan transduser merupakan perangkat yang memiliki kemampuan untuk merespon, mempertahankan serta menghasilkan sinyal elektronik dengan nilai sesuai dengan yang diterimanya (Jhosep, 1993).
Bagian-bagian penting yang harus dimiliki oleh suatu alat ukur meliputi: a. Input function (bagian masukan), merupakan bagian perangkat yang
juga dapat terdiri dari keluaran tegangan dalam bentuk AC ataupun DC.
b. Signal processing/amplifikasi, adalah bagian penguat sinyal dari sensor ataupun tranduser biasanya belum sesuai dengan tampilan yang dapat dihasilkan.
c. Fungsi keluaran, adalah instrumen yang sering diproses dengan beberapa perlakuan sebelum dapat ditampilkan. Bagian keluaran berfungsi dengan mencangkup power amplifikasi input/output sinyal (seperti pada kasus pengontrol driver motor), proses pendigitalan dari masukan ke komputer, atau tegangan yang diskalakan untuk
kemungkinan terjadinya kesalahan operasi oleh manusia.
Dalam pembentukan dan konstruksinya keseluruhan proses tersebut saling berinteraksi satu dengan yang lain, sehingga dapat dipadukan dalam satu
rangkaian secara berdekatan tetapi tidak menutup kemungkinan untuk dipadukan dalam kondisi terpisah.
SRF02 (Gambar 5.) adalah modul sensor jarak yang memiliki 2 mode komunikasi yaitu mode serial UART dan mode serial I2C. Informasi tentang bagaimana prinsip kerja SRF02 secara detail dapat dilihat pada datasheet (SRF02 , Mode Serial UART , Mode Serial I2C )
2.3.3 Sensor SRF 02
sebesar 5 Volt dengan arus 25 mA. Jarak yang dapat ditempuh antara 12 – 250 cm. SRF02 menerjemahkan suara menjadi jarak melalui 2 mode komunikasi, yaitu mode serial UART dan mode serial I2C (Robot-electronics, 2011a).
Gambar 5. Sensor SRF02 (Sumber: Robot-electronics, 2011a)
Pembacaan data jarak dengan I2C dilakukan dengan membaca bentuk data serial. Pada mode 8 byte, jarak ditentukan dengan menkonversi waktu tempuh sinyal yang digunakan oleh sensor dikalikan dengan kecepatan suara pada udara. Bentuk keluaran data disesuaikan dengan register dari I2C communication
protocol. Adapun bentuk register yang disediakan oleh SRF02 sesuai Tabel 1. Tabel 1. Register SRF02
Sumber : Robot-electronics, 2011c
Berikut tampilan i2c communication protocol pada CMPS 10 sesuai dengan Gambar 6.
Gambar 6. Skema I2C communication protocol (Sumber: Robot-electronics, 2011b)
I2C communication protocol dimulai dengan mengirimkan start byte, penulisan alamat modul SRF02 dengan read/write low (0x82), kemudian nomor register yang akan dibaca sesuai dengan Tabel 1. Selanjutnya diikuti dengan start byte lagi dan penulisan alamat modul SRF02 dengan output berupa jarak cm. (Robot-electronics, 2011b).
13
3.1 Waktu dan Lokasi Penelitian
Penelitian dilaksanakan pada bulan Juni 2011 sampai dengan Maret 2012.
Kegiatan penelitian terdiri dari dua bagian, yaitu pembuatan alat dan uji coba alat.
Pembuatan alat dilakukan di Laboratorium Workshop Akustik dan Instrumentasi
Kelautan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor,
sedangkan uji coba alat dilakukan di Laboratorium Flume tank, Fakultas
Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor.
3.2 Alat dan Bahan
Alat dan bahan yang digunakan dalam pembuatan prototypeACM mencakup
perangkat keras dan perangkat lunak. Alat yang digunakan dalam penelitian ini
sesuai dengan Tabel 2.
Tabel 2. Daftar Alat Yang digunakan
No Alat Fungsi
1 Seperangkat Komputer Merancang perangkat keras dan lunak serta sebagai media pengolah data
2 AVR Studio Membuat fimeware dan mengunduh ke
mikrokontroler
3 Digital Multi Meter Mengukur hambatan, voltase dan hubungan antar komponen
4 Solder listrik Menyolder komponen
5 Gerinda Listrik Memotong pcb, akrilik, dan bahan lainnya
6 Bor Listrik Melubangi permukaan casin
7 Pistol lem panas Melengketkan komponen dan casing
8 USBer Pro Menghubungkan komunikasi serial
9 Downloader Memasukan data pada mikrokontroller
10 Google sketchup 7 pro Membuat rancangan bentuk
11 Perangkat pendukung lainnya
Informasi lengkap mengenai bahan-bahan yang digunakan dalam pembuatan
ACM dapat dilihat pada Tabel 3.
Tabel 3. Daftar bahan yang digunakan
No Bahan Tipe/Nilai Jumlah
1 Modul mikrokontroler ATmega 32 1 buah
3 Tranduser SRF02 (frekuensi 40KHz) 4 buah
5 Akrilik 50 x 50 cm 1 lembar
Instrumen yang dirancang adalah suatu sistem pengambilan jarak yang
disesuaikan dengan pergerakan partikel kecepatan arus air. Sistem ini terdiri dari
beberapa unit fungsional yang secara keseluruhan terpadu dalam satu
mikrokontroler (AVR ATMEGA 32).
Pengukuran kecepatan arus menggunakan empat buah sensor ultrasonik yang
akan mendeteksi gelombang pantulan suara pergerakan partikel air. Pantulan
pergerakan air ini dikonversi dari jarak serta waktu pulsa sinyal yang
terkirim/diterima oleh sensor. Sensor yang digunakan adalah sensor ultrasonik
SRF02.
SRF02 adalah sensor ultrasonik yang hanya memiliki satu transduser yang
sensor SRF02 hanya membutuhkan tegangan sebesar 5 Volt dengan arus 25 mA.
Jarak yang dapat ditempuh antara 12 – 250 cm dengan frekuensi sebesar 40 KHz.
Bentuk gelombang yang dikeluarkan berbentuk single beam sesuai dengan
datasheet pada Lampiran 6. SRF02 mengubah suara menjadi jarak melalui 2 mode
komunikasi, yaitu mode serial UART dan mode serial I2C (Robot-electronics,
2011). Berikut adalah tampilan sistem pengolahan dan distribusi data dan
tegangan yang akan dibuat (Gambar 7.)
Gambar 7. Desain sistem pengolahan dan distribusi catu daya dan data
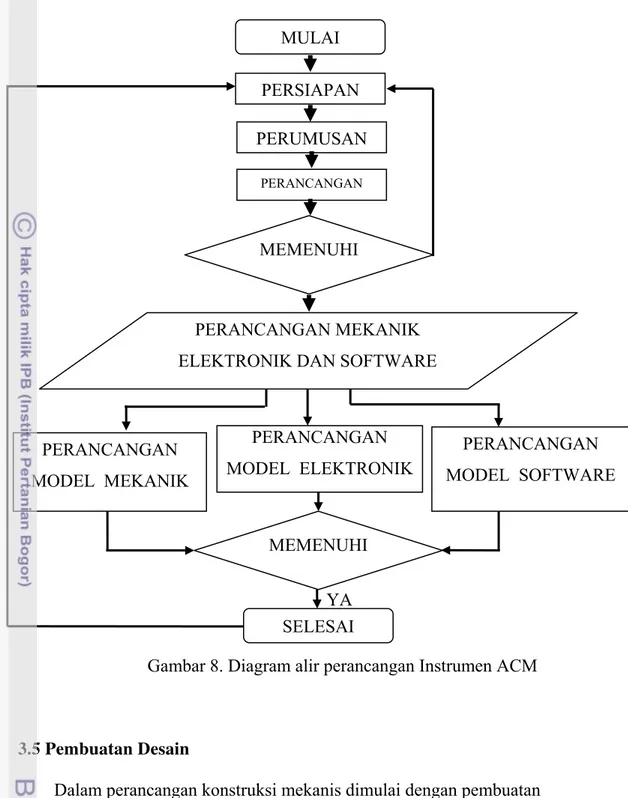
3.4 Desain Kerja
Perancangan instrumen ini dipadukan dalam tiga proses perancangan yaitu
perancangan konstruksi mekanik, konstruksi elektronik dan desain perangkat
lunak.. Tahapan terakhir adalah integrasi dari ketiga proses perancangan tersebut.
Tahapan proses perancangan instrumen ini dapat disusun sebagaimana
ditunjukkan pada diagram alir (Gambar 8.).
M
Gambar 8. Diagram alir perancangan Instrumen ACM
3.5 Pembuatan Desain
Dalam perancangan konstruksi mekanis dimulai dengan pembuatan
rancangan bentuk mempergunakan software desain Google sketchup 7 pro
(Gambar 9), pembuatan desain pada proses awal perancangan alat bertujuan untuk
memudahkan dalam proses pembuatan konstruksi mekanik, rangkaian elektronik
dan tata letak komponen yang terkait. MULAI
PERSIAPAN
PERUMUSAN
PERANCANGAN
MEMENUHI
PERANCANGAN
MODEL MEKANIK
PERANCANGAN
MODEL ELEKTRONIK
PERANCANGAN
MODEL SOFTWARE
MEMENUHI
SELESAI YA
PERANCANGAN MEKANIK
Gambar 9. Tampilan Google Sketch Up 7
3.6 Rancang Bangun Perangkat Keras 3.6.1 Pembuatan Mekanik
Pembuatan mekanik alat mengadopsi bentuk ADCP dengan menggunakan empat sensor dengan sudut KEMIRINGAN yang serupa yaitu 10o(Gambar 10),
serta digunakannya beberapa material yang saling mendukung. Tata letak sensor
mengikuti ADCP yang telah ada (Gambar 10). Dalam hal ini material yang
digunakan seperti akrilik, pipa pvc 4 inci, dop pipa 4 inci serta sambungan pipa
pvc.
3.6.2 Pembuatan Rangkaian Elektronik
Berikut adalah bagian kerja rangkaian elektronik yang digunakan:
1) Pembuatan skematik rangkaian, merupakan proses penyusunan rencana penggabungan komponen sambungan berupa gambar.
2) Pensolderan, dilakukan untuk menempelkan komponen pada sirkuit ataupun pada penyambungan antar komponen serta antar kabel.
Bagian rangkaian elektronik yang dibuat ini mempergunakan mikrokontroler
ATMEGA 32 sebagai pusat processing data dan tegangan. Gambar disusun
sesuai dengan jalur komunikasi yang telah dibuat pada rancangan umum.
Penggunaan sensor dalam hal ini SRF02 yang digunakan sesuai Gambar 5.
SRF02 adalah modul sensor jarak yang memiliki 2 mode komunikasi yaitu mode
serial UART dan mode serial I2C. Informasi tentang bagaimana prinsip kerja
SRF02 secara detail dapat dilihat pada data sheet (SRF02 , Mode Serial UART ,
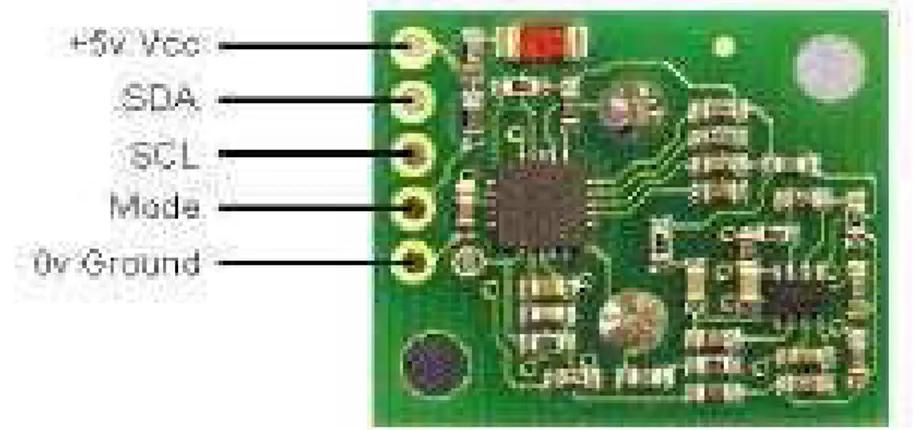
Mode Serial I2C ). Deskripsi pin untuk mode SRF02 adalah sebagai berikut :
1. VCC, pin ini dihubungkan ke sumber tegangan 5 Volt.
2. RX, pin ini digunakan untuk jalur penerimaan data.
3. TX, pin ini digunakan untuk jalur pengiriman data.
4. Mode, pin ini digunakan untuk menentukan mode yang sesuai
Gambar 11. Konfigurasi sensor SRF02 (sumber : Robot-elektronik 2006)
Agar bekerja pada mode serial UART maka pin Mode harus diberi logika
low atau dihubungkan ke ground. Modul SRF02 hanya akan melakukan proses
pengukuran jarak jika telah diberikan perintah terlebih dahulu. Dengan
mengirimkan data serial yang berisi alamat sensor kemudian diikuti dengan data
84 (bentuk desimal) atau 0x54 (bentuk heksa) sebagai perintah maka SRF02 akan
mulai melakukan proses pengukuran jarak dan setelah selesai dengan segera akan
mengirimkan data 2 byte sebagai data hasil pengukurannya. Data 2 byte hasil
pengukuran ini akan dikirimkan byte atasnya (upper byte) terlebih dahulu
kemudian diikuti byte rendahnya (lower byte). Jika data perintahnya 84 (bentuk
desimal) atau 0x54 (bentuk heksa) maka hasil pengukurannya akan memiliki
satuan centimeter. Jika dikehendaki satuan inci atau μs maka dapat dirubah data
perintahnya dengan 83 (bentuk desimal) atau 85 (bentuk desimal). Sesuai dengan
spesifikasi yang diberikan oleh produsen modul SRF02 ini, mode serial UART ini
hanya dapat bekerja pada kecepatan transmisi (baud rate) 9600 bps dan dengan
format data 1-byte start, 8-byte data, 2-byte stop, dan tidak ada paritas sesuai
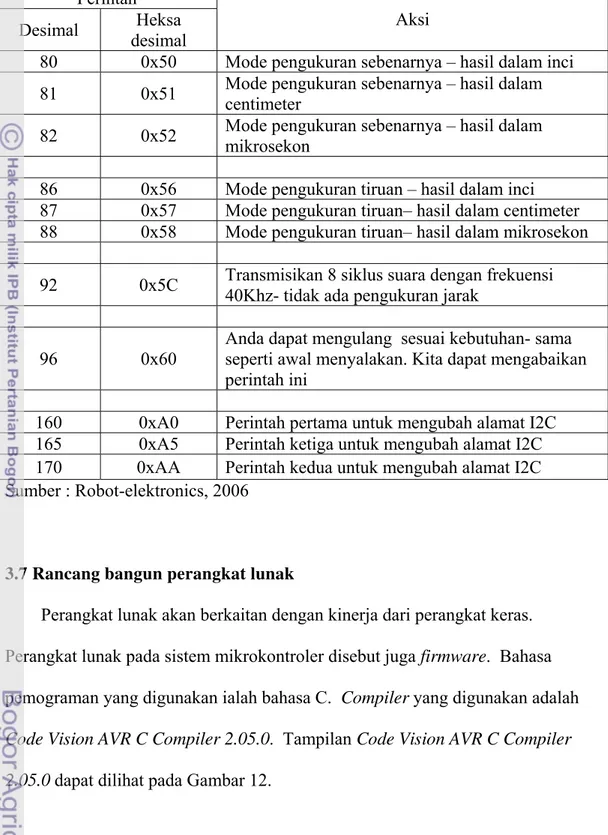
Tabel 4. Prosedur perintah dalam SRF02
Perintah
Aksi
Desimal Heksa
desimal
80 0x50 Mode pengukuran sebenarnya – hasil dalam inci
81 0x51 Mode pengukuran sebenarnya – hasil dalam
centimeter
82 0x52 Mode pengukuran sebenarnya – hasil dalam
mikrosekon
86 0x56 Mode pengukuran tiruan – hasil dalam inci 87 0x57 Mode pengukuran tiruan– hasil dalam centimeter 88 0x58 Mode pengukuran tiruan– hasil dalam mikrosekon
92 0x5C Transmisikan 8 siklus suara dengan frekuensi 40Khz- tidak ada pengukuran jarak
96 0x60
Anda dapat mengulang sesuai kebutuhan- sama seperti awal menyalakan. Kita dapat mengabaikan perintah ini
160 0xA0 Perintah pertama untuk mengubah alamat I2C 165 0xA5 Perintah ketiga untuk mengubah alamat I2C 170 0xAA Perintah kedua untuk mengubah alamat I2C Sumber : Robot-elektronics, 2006
3.7 Rancang bangun perangkat lunak
Perangkat lunak akan berkaitan dengan kinerja dari perangkat keras.
Perangkat lunak pada sistem mikrokontroler disebut juga firmware. Bahasa
pemograman yang digunakan ialah bahasa C. Compiler yang digunakan adalah
Code Vision AVR C Compiler 2.05.0. Tampilan Code Vision AVR C Compiler
Gambar 12. Tampilan Code Vision AVR C Compiler 20.5
Firmware yang telah dibuat diunduh menggunakan Atmel AVRProg (AVR 910)
dan kabel data K-125R USB AVR Programmer (Gambar 13). Pembuatan
program mikrokontroler ini dilakukan dengan menulis kode program sesuai
dengan kebutuhan yang digunakan. Setelah tidak ada kesalahan pada penyusunan
program, maka kode tersebut dikompilasi (mengubah kode program dalam format
*.hex) agar dapat diunduh pada mikrokontroler.
3.7.1 Diagram alir program
Diagram alir dibuat untuk mempermudah perancangan dan pembuatan
program, termasuk dalam pencarian kesalahan pada pemograman. Diagram ini
juga membantu mempermudah orang dalam memahami alur kerja dari program
yang sedang dirancang. Berikut adalah diagram alir yang digunakan dalam
penelitian yang terbagi menjadi 2 bagian yaitu regresi alamat I2C sensor
ultrasonik serta rancangan program perekaman sensor pada mikrokontroler
ATmega 32.
Bagian pertama ini adalah rancangan program yang diunduh pada
mikrokontroler ATmega 32 dengan fungsi menginisialisasi alamat sensor yang
digunakan (Gambar 14). Proses ini dilakukan agar keluaran sensor dapat diketahui
serta dipisahkan dari keempat sensor yang digunakan.
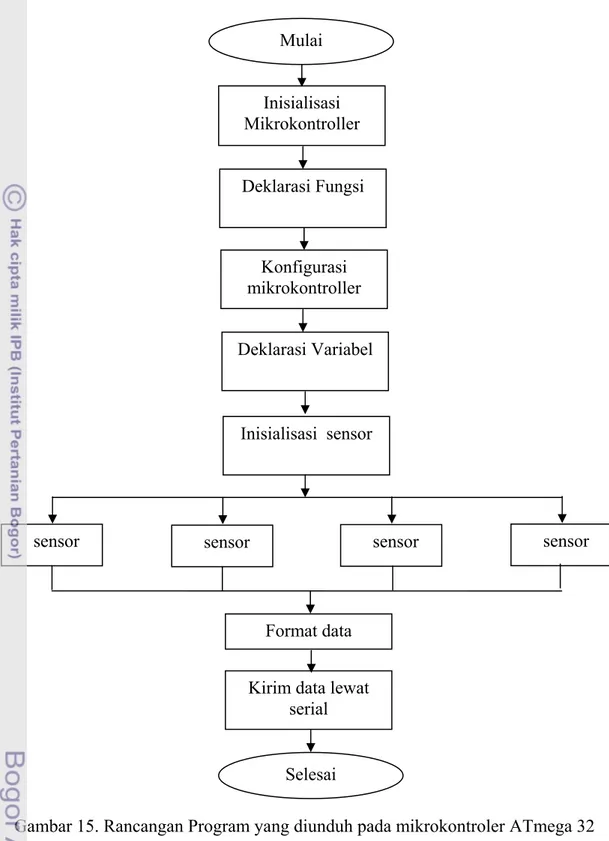
Bagian kedua ditampilkan pada Gambar 15 merupakan diagram alir
rancangan program yang diunduh pada mikrokontroler ATmega 32, bagian ini
merupakan proses penggabungan sistem kerja sensor yang digunakan. Nilai yang
dikeluarkan sensor berdasarkan hasil dari proses registrasi pada bagian awal
Satu sensor meggunakan 1
alamat
Tidak
Ya Mulai
Inisialisasi Mikrokontroller
Deklarasi Fungsi
Konfigurasi mikrokontroller
Deklarasi Variabel
Inisialisasi Variabel
Deklarasi Alamat Registrasi
SRF 02 Siap
Auto tune tidak sesuai
Auto tune sesuai
Selesai
Gambar 15. Rancangan Program yang diunduh pada mikrokontroler ATmega 32 Mulai
Inisialisasi Mikrokontroller
Deklarasi Fungsi
Konfigurasi mikrokontroller
Deklarasi Variabel
Inisialisasi sensor
sensor sensor sensor sensor
Format data
Kirim data lewat serial
3.7.2 Pemrograman mikrokontroler
Setelah firmware terbentuk, maka siap diprogram kedalam mikrokontroler ATmega 32. Pemrograman ini juga biasa disebut Flashing yang dilakukan untuk
memproses program adalah Code Vision AVR C Compiler 20.5. Pemrograman
dilakukan dengan menggunakan kabel Data seri K-125R Programmer.
3.8 Penyatuan seluruh perangkat
Penyatuan atau integrasi seluruh bagian perangkat dilakukan setelah proses
perancangan perangkat keras dan perangkat lunak yang telah selesai dibuat.
Penyatuan seluruh perangkat memerlukan perencanaan yang baik dalam
menempatkan bagian atau komponen yang ada. Penempatan ini harus sesuai
dengan fungsi dan sistem yang terencana terutama penempatan perangkat keras.
Penempatan ini seperti pada pengaturan tata letak kabel, tipe konektor, dan logika
alat. Perencanaan disesuaikan dengan skema rangkaian secara keseluruhan guna
mengoptimalkan kinerja alat.
3.9Pengujian kinerja Acoustic Current Meter (ACM)
Pengujian kinerja dilakukan pada saat proses perakitan dan penyatuan
maupun setelah proses perakitan dan penyatuan komponen telah selesai.
Pengujian dilakukan untuk menilai dan membandingkan sejauh mana tingkat
keberhasilan dalam proses pembuatan alat. Beberapa pengujian yang dilakukan
dalam pembuatan alat ini antara lain:
1) Pengujian kinerja sensor SRF02
3) Pengujian pengambilan data ACM
3.9.1 Pengujian kinerja sensor SRF02
Pengujian sensor dilakukan setelah perancangan perangkat lunak
diselesaikan. Pengujian ini membandingkan antara pola sebaran suara (lebar
beam) pada data sheet (Lampiran 6) dengan hasil pengukuran (output sensor).
Hal ini dilakukan sebagai control awal dalam penentuan titik acuan awal
penempatan sensor pada alat. berikut skema pengujian kinerja sensor (Gambar
16.)
Gambar 16. Skema pengujian kinerja sensor
3.9.2 Pengujian integrasi sensor SRF02
Pengujian integrasi sensor dilakukan setelah proses penyatuan sensor telah selesai baik perangkat lunak maupun perangkat keras. Proses ini dilakukan
dengan memeriksa nilai masukan dari setiap sensor berdasarkan keluaran nilai Sensor
Objek
90 cm
jarak yang didapatkan pada hyperterminal. Sensor akan mendapatkan perlakuan
dengan mendekatkan objek pada setiap sensor. Sensor dinyatakan berfungsi jika
terjadi perubahan nilai yang sesuai dengan ekspektasi. Hal ini dilakukan
sekaligus untuk memastikan posisi peletakan sensor telah sesuai.
3.9.3 Pengujian pengambilan data ACM
Pengujian data ACM dilakukan setelah ACM memiliki keluaran nilai yang
sesuai. Pengujian ini dilakukan dengan memberikan perlakuan perbedaan arus
searah pada objek yang diamati dengan membandingkan nilai pengukuran secara
manual. Perbedaan arus ini menggunakan level kecepatan yang bertambah pada
Flume Tank. Kecepatan arus ini menggunakan perbandingan kecepatan seperti
pola pada gigi sepeda. Pengukuran secara manual dilakukan dengan
menggunakan bola yang dihanyutkan dan dihitung kecepatannya dengan
perbandingan jarak dan waktu yang diterima. Poin yang diamati diantaranya
1. Pengamatan nilai awal objek sama untuk keseluruhan sensor
2. Perubahan nilai sebanding dengan nilai kecepatan
3. Data dapat diamati dan diterima oleh hyperterminal.
Langkah kerja yang dilakukan dalam proses pengujian instrumen Acoustic
Seting eksperimen pada media Flume Tank, dengan display pada laptop.
Proses selanjutnya adalah pengukuran jarak awal ACM01 dengan permukaan air
pada Flume Tank dilanjutkan dengan mengukur kecepatan arus sesuai dengan variasi level kecepatan dari Flume Tank
Pengambilan serta penyimpanan data hasil pengukuran ACM01 sebelum diolah
pada proses selanjutnya
4. HASIL DAN PEMBAHASAN
Hasil dari penelitian ini adalah sebuah prototipe current meter yang diberi
nama Acoustic Current Meter dengan code ACM01. ACM01 berfungsi dalam
pengukuran arus permukaan dengan menggunakan sensor ultrasonik. Dalam hasil
penelitian ini juga disampaikan data pengukuran yang dilakukan pada proses
pengujian sensor hingga pengujian alat skala laboratorium.
Pengujian yang dilakukan menunjukkan kemampuan alat dalam mengukur
perubahan arus dengan diikuti perubahan arah berdasarkan kuadran berjalan
dengan baik. Proses pengiriman data dari unit mekanik ke perangkat lunak juga
berjalan dengan baik dan cepat, sehingga dapat diketahui perubahan pada saat alat
diaktifkan.
4.1 Desain
Desain yang dipergunakan sebagai panduan alat ini adalah desain grafis yang
dibuat menjadi cetak biru (blue print). Adapun desain yang dirancang dapat
dilihat pada Gambar 18.
Desain dari ACM01 hanya memiliki satu bagian yaitu unit kompartemen
elektronik yang tergabung menjadi satu perangkat. Pada unit kompartemen
elektronik ini peletakan sensor memiliki sudut kemiringan dan jarak yang sama.
Konsep ini mengadopsi bentuk dari ADCP yang telah berkembang sebelumnya.
Gambar 18. Rancangan Desain 3D ACM01
Bagian sensor ini menjorok ke arah menjauhi titik tengah dari lingkaran
dengan jarak yang sama untuk setiap sensor terhadap titik tengah (Gambar 19).
Hal ini dimaksudkan agar perubahan nilai yang didapat lebih akurat dan presisi.
Gambar 19. Bagian Muka Sensor ACM01
Kemiringan serta letak sensor yang sama menghasilkan perubahan yang
sama tegak lurus terhadap objek (gelombang arus permukaan) yang dikeluarkan
dalam bentuk jarak. Perubahan ini diproses kemudian dipasang berdasarkan nilai
jarak dari setiap sensornya.
11,7 cm
23.5 cm 14.5 cm
16 cm
D = 3 cm
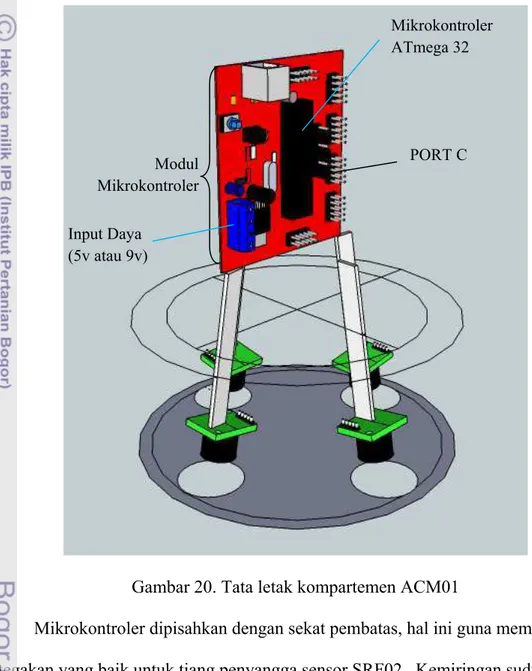
Berikut rancangan kompartemen elektronik dari ACM01 (Gambar 20).
Kompartemen ini dirancang berbentuk tabung yang cenderung membesar pada
bagian sensornya. Hal ini guna memperoleh kemiringan serta jarak yang lebih
proposional.
Gambar 20. Tata letak kompartemen ACM01
Mikrokontroler dipisahkan dengan sekat pembatas, hal ini guna memberikan
tegakan yang baik untuk tiang penyangga sensor SRF02. Kemiringan sudut
sebesar 10o ini ditentukan oleh tiang penyangga serta posisi sensor mewakili
setiap kuadrannya. Penempatan ini dilakukan untuk memudahkan dalam proses
penentuan posisi dan arah arus permukaan.
Modul Mikrokontroler
Mikrokontroler ATmega 32
PORT C
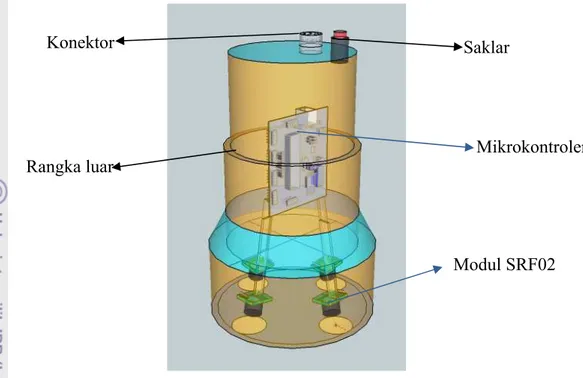
Gambar 21. Bentuk 3D ACM01 serta penempatan kompartemen elektronik
Proses penggabungan rangka dan kompartemen elektronik (Gambar 21)
merupakan hasil akhir dari alat ACM01 ini. Terlihat bahwa mikrokontroler
Atmega 32 berada pada bagian tengah alat, hal ini untuk mempermudah
pengaturan atau proses perubahan program jika dimungkinkan. Selain itu bagian
tengah juga dilengkapi dengan baterai untuk menunjang energi pada ACM01 ini.
Pada bagian atas, terlihat bahwa ACM01 ini dilengkapi dengan saklar dan
konektor. Bagian bawah, dilengkapi dengan modul sensor SRF02 sebanyak 4
buah, keseluruhan dari kompartemen dihubungkan oleh kabel sehingga
mempermudah kinerja dari alat yang dikembangkan.
4.2 Perangkat Keras
Pembuatan seluruh perangkat keras menghasilkan ACMberbobot 1kg
dengan dimensi yang kompak. Berikut penjabaran hasil pembuatan perangkat
keras yang telah dilakukan.
Saklar
Mikrokontroler
Modul SRF02 Rangka luar
Unit ACM01 ini hanya terdiri dari satu kompartemen yang saling terhubung.
Kompartemen ini disebut unit mekanik ACM01. Perangkat unit mekanik terdapat
kabel yang berfungsi sebagai distribusi tegangan serta transmit data menuju
hyperterminal.
Bentuk ACM01 yang dimaksud dapat dilihat pada Gambar 22. Penempatan
Gambar 22. Unit ACM01
sensor terdapat pada bagial muka atas kompartemen, namun modul
mikrokontroler tidak terlihat jelas pada Gambar 22. Posisi unit modul sensor ini
dapat terlihat dalam Gambar 23.
Peletakan unit sensor ini merupakan bagian terpenting dalam pengambilan
data. Sensor akan mendeteksi jarak dari objek yang bergerak dengan
perubahannya yang diterima oleh masing-masing sensor. Perubahan nilai ini akan
Gambar 23. Letak Modul Sensor SRF02
4.3 Perangkat Lunak
Penyusunan perangkat lunak adalah sebanyak dua bagian pemrograman,
yakni pemrograman registrasi alamat I2C sensor dan pemrograman
mikrokontroler ATmega 32. Masing-masing memiliki fungsi berdasarkan
spesifikasi komponen penyusunnya.
4.3.1 Program registrasi modul sensor SRF02
Program registrasi modul sensor SRF02 ini disesuaikan spesifikasi modul
sensor SRF02 dan mikrokontroler ATmega32. Hal ini dilakukan untuk
memisahkan alamat yang digunakan untuk setiap sensornya.
Inisialisasi dan konfigurasi mikrokontroler dilakukan pada saat memulai
pemograman. Hal ini sangat penting dilakukan dan harus benar-benar tepat agar
program dapat berjalan sesuai dengan harapan sebelum diunduh kedalam
digunakan, serta beberapa fitur yang digunakan seperti library dan juga definisi
port yang digunakan.
#i nc l ude <mega32a. h> #i nc l ude <del ay . h>
Penggunaan Code Vision AVR C ini diawali dengan penulisan header
#include. #include <mega32a.h> digunakan sebagai deklarasi jenis
mikrokontroler yang akan digunakan, dalam hal ini ATmega 32. Selanjutnya
#include <delay.h> membantu dalam penentuan jeda pemrosesan data oleh
mikrokontroler.
Kode program yang dipergunakan dalam memproses registrasi sensor adalah
sebagai berikut :
code “tulis_SRF02” merupakan langkah-langkah yang perlu dilakukan dalam
merubah alamat SRF02. “0Xe0” merupakan kode alamat yang akan digunakan
yaitu e0 sebagai kode keluaran dari salah satu sensor, sedangkan “81” merupakan
alamat I2C dari sensor yang akan digunakan.
4.3.2 Program Mikrokontroler
Program mikrokontroler terdiri dari beberapa bagian. Bagian pertama yang
harus ada adalah inisialisasi library yang digunakan seperti #include
Pada inisialisasi komunikasi I2C disertakan juga pin yang digunakan untuk SDA
dan SCL yaitu PINC.0 sebagai SCL dan PINC.1 sebagai SDA. SDA merupakan
pin untuk data masuk dan keluar, sedangkan SCL merupakan sarana pengatur
clock dalam perangkat mikrokontroler.
Fungsi tulis_SRF02 digunakan untuk memerintah SRF02 melakukan ping.
Fungsi ini menggunakan protokol komunikasi I2C. perintahnya sebagai berikut:
v oi d t ul i s _SRF02 ( uns i gned c har SRF02_ADDRESS, uns i gned
Fungsi void digunakan karena tidak membutuhkan nilai keluaran yang
digunakan dalam program utama. Fungsi ini membutuhkan 3 input dengan nama
variabelnya yaitu SRF02_ADDRESS, alamat, dan data. Tipe data dari ketiga
variabel ini sama. Langkah pertama dalam komunikasi I2c adalah i2c_start().
Kode ini digunakan utnuk menandakan bahwa komunikasi dimulai. Kemudian
perintah “i2c_write(SRF02_ADDRESS)”digunakan untuk menuliskan register
yang diinginkan ke sensor SRF02. “i2c_write(alamat)” digunakan untuk
menuliskan alamat yang ingin diakses. “i2c_write(data)” digunakan untuk
mengambil tipe data yang diinginkan. “i2c_stop” digunakan untuk mengakhiri
komunikasi i2c.
Fungsi int baca_SRF02 digunakan untuk mengambil data yang telah
Fungsi ini memerlukan dua input. Fungsi ini memberikan keluaran yang akan
digunakan pada program utama dengan nama variabel “data”. Komunikasinya
mirip dengan void tulis_SRF02. Perbedaannya hanya pada “data=i2c_read(0)”.
Perintah ini digunakan untuk mengambil data dari SRF02 tanpa adanya ACK
(acknowledgement).
Pada program utama, programnya sebagai berikut:
t ul i s _SRF02( 0Xe0, 0, 81) ; / / s r f 1
langkah yang dilakukan adalah mengirimkan perintah pada 4 SRF02 untuk
melakukan pengukuran. “delay_ms(70)” digunakan untuk memberikan waktu
pada SRF02 untuk menyelesaikan pengukuran. Kemudian data ini diambil dan
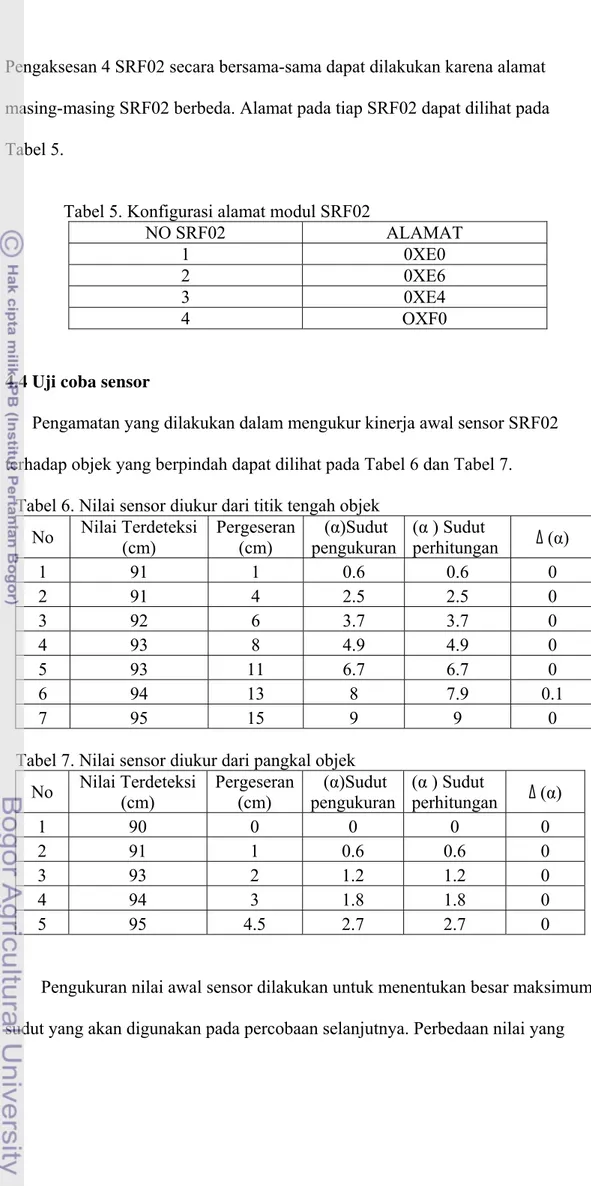
Pengaksesan 4 SRF02 secara bersama-sama dapat dilakukan karena alamat
masing-masing SRF02 berbeda. Alamat pada tiap SRF02 dapat dilihat pada
Tabel 5.
Tabel 5. Konfigurasi alamat modul SRF02
NO SRF02 ALAMAT
1 0XE0 2 0XE6 3 0XE4 4 OXF0
4.4 Uji coba sensor
Pengamatan yang dilakukan dalam mengukur kinerja awal sensor SRF02
terhadap objek yang berpindah dapat dilihat pada Tabel 6 dan Tabel 7.
Tabel 6. Nilai sensor diukur dari titik tengah objek
No Nilai Terdeteksi (cm)
Tabel 7. Nilai sensor diukur dari pangkal objek
No Nilai Terdeteksi (cm)
Pengukuran nilai awal sensor dilakukan untuk menentukan besar maksimum
didapat disebabkan karena pada Tabel 6 nilai yang didapat menggunakan titik
acuan yaitu tepat pada titik keseimbangan objek. Namun untuk nilai selanjutnya
didapat dari pengambilan dari ujung objek sehingga terjadi perbadaan nilai dari
pergeseran objek.
Pengambilan nilai ini masih menggunakan cara manual melalui
hyperterminal dalam pengambilan perubahan nilai yang terjadi. Objek tersebut
mengalami perlakuan yakni pergeseran secara lurus hingga sensor tidak
mendeteksi objek. Adapun nilai sudut yang dapat digunakan hingga 10o. Nilai
sudut ini digunakan dalam menentukan kemiringan maksimum sensor dalam
merancang ke tahap selanjutnya.
4.5 Uji ACM01
Setelah melakukan proses uji coba sensor, maka tahap selanjutnya yaitu
melakukan integrasi komponen dan juga uji alat. Proses uji ACM01 ini dilakukan
dengan menggunakan tiga variasi kecepatan yang semakin meningkat pada flume
tank. Nilai kecepatan ini disesuaikan dengan tingkatan yang ada pada flume tank
yang digunakan (seperti gigi pada sepeda). Langkah awal yang dilakukan adalah
persiapan dari insrumen ACM01, hal ini meliputi peletakan instrumen ACM01
dan juga pengukuran tinggi awal dari Flume Tank yang digunakan. Proses ini
menghasilkan tinggi pengukuran awal muka air pada Flume Tank sebesar 28 cm
yang dideteksi oleh semua sensor.
Pengukuran nilai deteksi jarak pada percobaan ini memiliki perbedaan dari
setiap variasi level kecepatan yang digunakan. Adapun hasil kecepatan yang
Tabel 8. Hasil perolehan nilai kecepatan pada flume tank
No
Vrata-rata Real
(cm/s)
V rata-rata hitung (input
data dari hasil pengukuran
ACM) (cm/s)
Nilai rata-rata kecepatan hasil perhitungan keseluruhan nilainya lebih kecil
dibandingkan dengan nilai rata-rata kecepatan real (hasil pengukuran manual).
Nilai kecepatan real ini digunakan sebagai pembanding dari hasil pengamatan
dengan menggunakan ACM01. Hasil yang diperoleh memiliki kolerasi
berbanding lurus dengan bertambahnya nilai kecepatan pada flumetank.
Perbedaan terbesar terjadi pada nilai kecepatan kedua yaitu sebesar 7.94 cm/s atau
32.6%.
Untuk dapat melihat sebaran nilai hasil perhitungan dapat dilihat pada
Gambar 24-26. Gambar 24 merupakan hasil dari perhitungan nilai kecepatan
pertama. Pada grafik ini garis linear tampak berada pada nilai kecepatan real
Gambar 24. Grafik hasil pengamatan ACM01 (18,45 cm/det)
Gambar 25. Grafik hasil pengamatan ACM01 (31,78 cm/det)
Pada ketiga grafik ini memiliki nilai hamburan yang berbeda, semakin cepat
nilai arus yang digunakan semakin besar nilai sebaran pada grafik. Hal ini dapat
disebabkan oleh bentuk gelombang yang dihasilkan semakin banyak interaksinya
dan besar dengan peningkatan kecepatan arus pada Flume Tank. yang digunakan.
Peningkatan kecepatan arus yang digunakan dapat menyebabkan faktor noise
meningkat juga. Selain itu, riak gelombang yang semakin banyak dapat
menyebabkan efek doppler pada sensor yang menyebabkan terjadinya nilai
deteksi sensor yang semakin besar atau semakin kecil dalam mendeteksi nilai
jarak.
5.
KESIMPULAN DAN SARAN
5.1. KesimpulanProses pengembangan prototipe Acoustic Current Meter 01 ini telah selesai dilakukan. Sensor yang digunakan dapat digunakan dalam mendeteksi jarak objek secara maksimal dengan proses pemisahan antar sensornya. Secara keseluruhan sistem prototipe ACM01 ini dapat bekerja dengan baik, walaupun masih perlu terus disempurnakan.
Secara umum, ACM01 ini dapat diterapkan dalam mengambil nilai jarak pada permukaan air. Permasalahan yang perlu dipecahkan yaitu : penggunaan pencatatan waktu secara digital dalam pengambilan data agar galat yang ditimbulkan tidak begitu besar.
5.2. Saran
Saran untuk penelitian berikutnya adalah:
a. Perlu adanya kalibrasi sensor dengan suhu sekitar.
b. Perlu pengolahan data yang lebih baik dalam menentukan algoritma yang tepat guna memperoleh galat yang kecil.
c. Perlu adanya perlakuan perbedaan sudut kemiringan guna memperoleh sudut kemiringan yang optimum dalam pengolahan data.
DAFTAR PUSTAKA
Atmel. 2011. 8-bit Microcontroller with 32K Bytes In-System Programmable Flash ATmega32A. http://www.atmel.com/dyn/…/doc8155.pdf [diunduh tanggal 12 Agustus 2011]
Charr, JJ. 1993. Sensor and Circuits (Sensors, Transducers, and Supporting Circuits for Electronic Instrumenation, Measurement and Control). Pretice Hall. Inc. London
Gross, M.G. 1972. Oceanography, 6th edition, Pretice Hall, Inc. Englewood Cliff. New Jersey.
Gross, M.G.1990.Oceanography : A View of Earth. Prentice Hall, Inc. Englewood Cliff. New Jersey.
McArthur, Christopher J and Parsons Mel.2005.Ocean Current and Wave Measurements at the Canaveral Harbor Ocean Dredged Material
Disposal Site January 2003 through February 2004. U.S. Environmental Protection Agency Region 4. Atlanta
Nontji, A. I987. Laut Nusantara. Jakarta
OOT ADC. 2008. The New Acoustic Digital Current Meter. OOT Meshtechnik. Kempten. Germany.
Robot-elektronics,2006. SRF02 - Ultra-Sonic Ranger Technical Specification. http://www.robot-electronics.co.uk/htm/srf02techI2C.htm [diunduh tanggal 20 November 2011]
Robot-elektronics,2011a. SRF02 - Ultra-Sonic Ranger Technical Specification. http://www.robot-electronics.co.uk/htm/srf02tech.htm [diunduh tanggal 12 Agustus 2011]
Robot-electronics. 2011b. CMPS10-Tilt Compensated Compass Module I2C Mode. http://www.robot-electronics.co.uk/htm/cmps10i2c.htm [diunduh tanggal 15 Agustus 2011]
Robot-electronics. 2011c. Using I2C Bus. http://www.robot-electronics.co.uk/ acatalog/I2C_Tutorial.html [diunduh tanggal 12 Februari 2012]
Sivastava A.C. 1987. Teknik Instrumenasi. Universitas Indonesia Press. Jakarta
USGS. 2006. Estimates of Shear Stress and Measurements of Water Levels in the Lower Fox River near Green Bay, Wisconsin.
http://pubs.usgs.gov/sir/2006/5226/‐Estimates of Shear Stress.html [diunduh tanggal 15 Maret 2012]
Winoto, A. 2008. Tehnik Mudah Belajar Mikrokontroler AVR ATMEGA 32. Gramedia. Jakarta
Lanjutan Lampiran 1
38 22 28 23 22
39 21 25 22 22
40 28 24 23 22
41 22 24 22 22
42 24 22 22 23
43 22 25 22 25
44 24 23 26 22
45 24 23 23 25
46 23 23 22 22
47 23 44 29 23
48 23 22 21 21
49 23 46 22 23
50 23 22 22 43
51 22 23 21 22
52 22 24 21 21
53 24 23 21 21
Lanjutan Lampiran 2
72 28 22 24 21
73 23 25 21 22
74 24 23 22 23
75 21 25 21 21
Lanjutan Lampiran 3
Lanjutan Lampiran 3
Lanjutan Lampiran 3
152 21 23 23 24
153 23 22 22 22
154 24 24 25 23
Lampiran 4. Data hasil pengukuran
Lampiran 7. Kode program register modul SRF02 Code Vision AVR 2.05 #include <mega32a.h>
#include <delay.h> //#define new_srf 0xe2 #asm
.equ __i2c_port=0x15 ;PORTC .equ __sda_bit=1
.equ __scl_bit=0 #endasm
#include <i2c.h>
void tulis_SRF2 (int reg, unsigned char alamat,int data) {
TWCR = 0xA4; // send a start bit on i2c bus
while(!(TWCR & 0x80));// wait for confirmation of transmit TWDR = reg; // load address of i2c device
TWCR = 0x84; // transmit
while(!(TWCR & 0x80));// wait for confirmation of transmit TWDR = alamat;
TWCR = 0x84; // transmit
while(!(TWCR & 0x80));// wait for confirmation of transmit TWDR = data;
TWCR = 0x84; // transmit
Lampiran 8. Kode program mikrokontroller ATmega32 Code Vision AVR 2.05 #include <mega32a.h>
#include <delay.h> // I2C Bus functions #asm
.equ __i2c_port=0x15 ;PORTC .equ __sda_bit=1
.equ __scl_bit=0 #endasm
#include <i2c.h>
void tulis_SRF02 (unsigned char SRF02_ADDRESS,unsigned char alamat, unsigned char data)
{
int baca_SRF02 (unsigned char SRF02_ADDRESS,unsigned char alamat) {
Lanjutan Lampiran 8
#define FRAMING_ERROR (1<<FE) #define PARITY_ERROR (1<<UPE) #define DATA_OVERRUN (1<<DOR)
#define DATA_REGISTER_EMPTY (1<<UDRE) #define RX_COMPLETE (1<<RXC)
// USART Receiver buffer #define RX_BUFFER_SIZE 8 char rx_buffer[RX_BUFFER_SIZE]; #if RX_BUFFER_SIZE <= 256
unsigned char rx_wr_index,rx_rd_index,rx_counter; #else
unsigned int rx_wr_index,rx_rd_index,rx_counter; #endif
// This flag is set on USART Receiver buffer overflow bit rx_buffer_overflow;
// USART Receiver interrupt service routine interrupt [USART_RXC] void usart_rx_isr(void) {
Lanjutan Lampiran 8
if ((status & (FRAMING_ERROR | PARITY_ERROR | DATA_OVERRUN))==0)
{
rx_buffer[rx_wr_index++]=data; #if RX_BUFFER_SIZE == 256
// special case for receiver buffer size=256 if (++rx_counter == 0)
{ #else
if (rx_wr_index == RX_BUFFER_SIZE) rx_wr_index=0; if (++rx_counter == RX_BUFFER_SIZE)
{
// Get a character from the USART Receiver buffer #define _ALTERNATE_GETCHAR_ #if RX_BUFFER_SIZE != 256
if (rx_rd_index == RX_BUFFER_SIZE) rx_rd_index=0; #endif
Lanjutan Lampiran 8
#if TX_BUFFER_SIZE <= 256
unsigned char tx_wr_index,tx_rd_index,tx_counter; #else
unsigned int tx_wr_index,tx_rd_index,tx_counter; #endif
// USART Transmitter interrupt service routine interrupt [USART_TXC] void usart_tx_isr(void) {
if (tx_counter) {
--tx_counter;
UDR=tx_buffer[tx_rd_index++]; #if TX_BUFFER_SIZE != 256
if (tx_rd_index == TX_BUFFER_SIZE) tx_rd_index=0; #endif
} }
#ifndef _DEBUG_TERMINAL_IO_
// Write a character to the USART Transmitter buffer #define _ALTERNATE_PUTCHAR_
#pragma used+ void putchar(char c) {
while (tx_counter == TX_BUFFER_SIZE); #asm("cli")
if (tx_counter || ((UCSRA & DATA_REGISTER_EMPTY)==0)) {
tx_buffer[tx_wr_index++]=c; #if TX_BUFFER_SIZE != 256
Lanjutan Lampiran 8 void main(void)
// Standard Input/Output functions #include <stdio.h>
// Declare your global variables here {
// Declare your local variables here int data,data1;
// Input/Output Ports initialization // Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTB=0x00;
DDRB=0x00;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTC=0x00;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTD=0x00;
DDRD=0x00;
// Timer/Counter 0 initialization // Clock source: System Clock // Clock value: Timer 0 Stopped // Mode: Normal top=0xFF // OC0 output: Disconnected TCCR0=0x00;
Lanjutan Lampiran 8
// Timer/Counter 1 initialization // Clock source: System Clock // Clock value: Timer1 Stopped // Mode: Normal top=0xFFFF // OC1A output: Discon. // OC1B output: Discon. // Noise Canceler: Off
// Input Capture on Falling Edge // Timer1 Overflow Interrupt: Off // Input Capture Interrupt: Off // Compare A Match Interrupt: Off // Compare B Match Interrupt: Off TCCR1A=0x00;
// Timer/Counter 2 initialization // Clock source: System Clock // Clock value: Timer2 Stopped // Mode: Normal top=0xFF // OC2 output: Disconnected ASSR=0x00;
TCCR2=0x00; TCNT2=0x00; OCR2=0x00;
// External Interrupt(s) initialization // INT0: Off
// INT1: Off // INT2: Off MCUCR=0x00; MCUCSR=0x00;
Lanjutan Lampiran 8 // USART initialization
// Communication Parameters: 8 Data, 1 Stop, No Parity // USART Receiver: On
// USART Transmitter: On // USART Mode: Asynchronous // USART Baud Rate: 9600
// Analog Comparator initialization // Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off ACSR=0x80;
SFIOR=0x00; // ADC initialization // ADC disabled ADCSRA=0x00; // SPI initialization // SPI disabled SPCR=0x00; // TWI initialization // TWI disabled TWCR=0x00;
// I2C Bus initialization i2c_init();
// Global enable interrupts #asm("sei")
while (1) {
Lanjutan Lampiran 8
tulis_SRF02(0Xe0,0,81); //srf1 delay_ms(70);
data=baca_SRF02(0Xe0,2)<<8; data+=baca_SRF02(0xe0,3); printf("%i\r\n",data);
delay_ms(2000);
//tulis_SRF02(0XE6,0,81); //delay_ms(70);
//data1=baca_SRF02(0xe4,2)<<8; //srf2 //data1+=baca_SRF02(0xe4,3);
//printf("%i\r\n",data1);
//tulis_SRF02(0XE4,0,81); //srf3 //delay_ms(70);
//data1=baca_SRF02(0xe4,2)<<8; //data1+=baca_SRF02(0xe4,3); //printf("%i\r\n",data1);
//tulis_SRF02(0XE0,0,81); //srf4 //delay_ms(70);
//data1=baca_SRF02(0xe0,2)<<8; //data1+=baca_SRF02(0xe0,3); //printf("%i\r\n",data1);
//delay_ms(1000); }
Lampiran 9. Diagram Alir Proses pengolahan data ACM01
Ini sialisasi mikrokontroler
A
mikrokontroler
Sensor 1 Sensor 2 Sensor 3 Sensor 4
Display
sesuai
Inisialis asi mik roko ntroler
E
Input data sensor
Inisialisasi mikrokontroler
C
Inisialisasi mikrokontroler
D
Mulai Inisialisasi mikrokontroler Deklarasi Fungsi
Inisialis asi mik roko ntroler
A Deklarasi Variabel Deklarasi konstanta
Inisialisasi mikrokontroler
B
Inisialis asi mik roko ntroler
B Insialisasi pin SRF02 Insialisasi alamat SRF02
Inisialisasi mikrokontroler
Lanjutan Lampiran 9.
E Data masuk Simpan *txt F
G Tampilkan data dalam Matlab
Masukkan data
perhitungan dan H
I
Gunakan fasilitas CF tools pada matlab, sesuaikan bentuk grafik
Intepretasi dari tampilan yang dihasilkan Ms. Excel
F
rata-ratakan nilai sensor 1 dan 3, serta sensor 2 dan
Tentukan nilai jarak rataan sensor,
Hitung selisih jarak rataan sensor 1-3 dengan 2-4
Delay sensor ± 1 detik Jarak (selisih rataan 1 – rataan 2)
s= v*t
1.
PENDAHULUAN
1.1. Latar Belakang
Sebagian besar permukaan bumi diselimuti oleh perairan. Begitu juga dengan wilayah Negara Kesatuan Republik Indonesia yang berbentuk kepulauan. Wilayah perairan Indonesia adalah sekitar 70% dari total luas wilayahnya.
Arus laut adalah gerakan massa air dari satu tempat ke tempat lain baik secara vertikal (atas atau bawah) maupun secara horizontal (samping). Arus laut membawa percampuran dari berbagai tipe pergerakan air, baik periodik maupun aperiodik dengan skala yang luas dan besar, serta berhubungan dengan kecepatan dan waktu. Varibilitas dari kecepatan dan arah arus laut adalah karakteristik yang mempengaruhi gerak arus.
Pengukuran kecepatan arus secara manual dapat dilakukan dengan
menghanyutkan benda terapung yang terikat dan dihitung jarak tempuh dan waktu yang dibutuhkannya, sedangkan untuk arah arus dilakukan dengan pengamatan arah pada kompas terhadap terhadap arah regangan pengikat. Alat pengukur arus secara makanik mengukur kecepatan arus yang dihasilkan dari perputaran rotor. Alat ini bekerja secara mekanik, yaitu badan air yang bergerak memutar baling – baling yang dihubungkan dengan sebuah roda gigi. Pada roda gigi tersebut terdapat penghitung (counter) dan pencatat waktu (time-keeper) yang merekam jumlah putaran untuk setiap satuan waktu. Melalui suatu proses kalibrasi, jumlah putaran per satuan waktu yang dicatat dari alat ini dikonversi ke kecepatan arus dalam meter per detik (m/s).
Alat untuk mengukur arah dan kecepatan arus serta gelombang secara elektronik diantaranya current meter dan Acoustic Current Meter (ACM).
Pengukuran arus secara manual membutuhkan peran manusia sehingga kemungkinan terjadi human error yang relatif besar. Selain itu pengukuran secara manual tersebut, banyak membuang waktu sehingga kurang efektif dan efisien. Saat ini, instrumen pengukuran arus laut di Indonesia memiliki harga yang relatif sangat mahal dan juga merupakan barang import. Salah satu solusi yang tepat dan mudah adalah membuat suatu alat ukur dengan sistem elektronik.
1.2. Tujuan Penelitian
2. TINJAUAN PUSTAKA
2.1 Arus Laut dan Metode Pengukurannya
Arus merupakan gerakan mengalir suatu massa air yang dapat disebabkan oleh tiupan angin, perbedaan densitas air laut atau dapat pula disebabkan oleh gerakan periodik jangka panjang yang disebabkan oleh aktivitas fisika air laut tersebut (Nontji 1987). Menurut Gross (1972) arus laut adalah proses pergerakan massa air laut yang menyebabkan perpindahan horizontal dan vertikal massa air tersebut yang terjadi secara terus menerus. Kecepatan arus merupakan konversi dari waktu yang dibutuhkan oleh pergerakan massa air dengan perbandingan antara jarak dengan waktunya.
Arus merupakan campuran rumit dari berbagai jenis gerakan periodik dan aperiodik, mulai dari berbagai skala ukuran, kecepatan dan waktu. Varibilitas kecepatan dan arah arus laut merupakan salah satu karakteristik yang paling menonjol. Arus dapat ditunjukkan secara vektor, yang menampilkan hubungan antara arah dan kecepatan arus laut. Rata-rata dapat diambil secara rataan vektor atau rataan skalar.
Metode pengukuran yang biasa digunakan adalah metode pengukuran secara insitu. Pada pengukuran arus secara insitu, digunakan metode Eularian yang merupakan pengukuran arus pada suatu titik yang tetap. Alat pengukur arus yang sederhana adalah menggunakan free-floating drogued bouy untuk mengukur kecepatan dan kompas bidik untuk mendapatkan arah dari arus tersebut. Metode yang juga dikembangkan dalam pengukuran arus yaitu
dikembangkan dengan metode ‘laglarian’. Salah satunya yaitu penggunaan drifter bouy sebagai alternatif dari metode ‘eularian’ yang mengkonversi jarak perpindahan berbanding terbalik dengan waktu perpindahannya.
.
2.1.1 Pengukuran Arus Dengan Cara Mekanik
Current Meter mekanik (Gambar 1) adalah alat ukur arah dan kecepatan arus, dimana badan air yang bergerak memutar baling – baling yang dihubungkan dengan sebuah roda gigi. Pada roda gigi tersebut terdapat penghitung (counter) dan pencatat waktu (time-keeper) yang merekam jumlah putaran untuk setiap satuan waktu. Melalui suatu proses kalibrasi, jumlah putaran per satuan waktu yang dicatat dari alat ini dikonversi ke kecepatan arus dalam meter per detik (m/s).
Gambar 1. Contoh bentuk instumen pengukur arus secara mekanik (sumber: ICSM, 2012)