PERANCANGAN DAN PEMBUATAN ARGOMETER
DIGITAL MENGGUNAKAN GPS
SKRIPSI
NIM : 120821021
TIMBUL YERIKO SIAHAAN
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
PERANCANGAN DAN PEMBUATAN ARGOMETER
DIGITAL MENGGUNAKAN GPS
SKRIPSI
Diajukan untuk melengkapi dan memenuhi syarat mencapai gelar sarjana sains
NIM : 120821021
TIMBUL YERIKO SIAHAAN
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
2014
Judul : PERANCANGAN DAN PEMBUATAN ARGOMETER DIGITAL MENGGUNAKAN GPS
Kategori : SKRIPSI
Nama : TIMBUL YERIKO SIAHAAN Nomor Induk Mahasiswa : 120821021
Program Studi : SARJANA (S1) FISIKA Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM ( FMIPA )
Dilaksanakan di : Medan, 29 Agustus 2014
Diketahui/ Disetujui oleh, Departemen Fisika FMIPA USU
Ketua Pembingbing
Dr. Marhaposan Situmorang Drs. Takdir Tamba, M.Eng.Sc NIP. 195510301980031003 NIP. 196006031986011002
PERNYATAAN
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendir, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 29 agustus 2014
NIM.120821021
PENGHARGAAN
Puji dan syukur penulis panjatkan Tuhan Yang Maha Esa yang senantiasa melimpahkan karunia-Nya dan selalu memberikan kemudahan dan kelancaran sehingga penulis dapat menyelesaikan Skripsi ini dengan judul “ PERANCANGAN DAN PEMBUATAN ARGOMETER DIGITAL MENGGUNAKAN GPS “, dapat diselesaikan dengan baik.
Dalam kesempatan ini penulis menyampaikan rasa hormat dan ucapan terima kasih yang sebesar- besarnya kepada keluarga serta orang- orang yang mendukung sehingga penulis dapat menyelesaikan proyek Skripsi ini. Pada kesempatan ini penulis mengucapkan terima kasih banyak kepada :
1. Bapak Dr. Sutarman, M.Sc selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
2. Bapak Dr. Marhaposan Situmorang, selaku ketua jurusan departemen fisika Universitas Sumatera Utara.
3. Bapak Drs. Takdir Tamba,M.Eng.Sc Selaku dosen pembingbing pada penyelesaian laporan Skripsi ini dan memberikan panduan serta perhatian pada penulis untuk menyempurnakan laporan ini Skripsi ini.
4. Seluruh Dosen serta seluruh pegawai program studi Fisika Fakultas Matemetika dan Ilmu Pengetahuan Alam.
5. Teristimewa Ayahanda P. Siahaan dan Ibunda C. Tampubolon serta saudara saya yang telah banyak memberikan dukungan doa, moril, materil, serta sudah menjadi motivator. 6. Teruntuk Agustina Situmorang, kekasih yang selalu memberi dukungan, semangat, dan
doa.
8. Sahabat-sahabat saya yang selalu memberikan dukungan dan motivasi
Penulis menyadari bahwa dalam penyusunan Skripsi ini masih terdapat kekurangan maupun kesalahan. Untuk penulis sangat mengharapkan kritik dan saran dari semua pihak untuk penyempurnaan laporan ini.
Akhirnya penulis berharap semoga Skripsi ini dapat bermanfaat bagi penulis dan pembaca, khususnya rekan-rekan mahasiswa lainnya yang mengikuti perkuliahan di Universitas Sumatera Utara.
Medan, 29 Agustus 2014 Hormat Penulis,
ABSTRAK
ABSTRACK
DAFTAR ISI
Halaman
Persetujuan ... iii
Pernyataan ... iv
Penghargaan ... v
Abstrak ... vii
Abstract ... viii
Daftar Isi ... ix
Daftar Gambar ... xii
Daftar Tabel ... xiv
BAB I PENDAHULUAN ... 1
1.1 Latar belakang ... 2
1.2 Rumusan masalah ... 2
1.3 Batasan masalah ... 2
1.4 Tujuan penelitian ... 2
1.5 Manfaat Penelitian ... 2
1.6 Sistematika Penulisan ... 2
BAB II LANDASAN TEORI ... 4
2.1.1 Signal Satelite GPS ... 6
2.1.1.1 Cariers ... 6
2.1.1.2 Pseudo-Random Codes ... 7
2.1.1.3 Navigation Massage ... 7
2.1.2 Bagian Bagian Daerah Kerja GPS ... 7
2.1.3 Cara Kerja GPS ... 8
2.1.4 Menentukan Posisi dari Receiver ke Satelite GPS 11
2.1.5 TTFF ( Time to First Fix ) ... 12
2.1.6 Ketidak Akuratan pada GPS ... 15
2.1.7 Bagaimana Sinyal dapat Menentukan Lokasi ... 17
2.1.8 Manfaat GPS ... 17
2.1.9 Model dan Interkoneksi GPS ... 19
2.1.10 Format Kalimat GPS ... 20
2.1.11 GGA (Global Positinioning System Fix Data) .... 22
2.1.12 Istilah-Istilah yang Penting ... 23
2.1.13 Metode Penghitungan Jarak GPS ... 24
2.1.13.1 Metode Euclidean ... 24
2.1.14 Data GPS ... 25
2.2 ATMega 16 ... 25
2.2.2 Konfigurasi PENA ( Pin ) ATMega 16 ... 27
2.2.3 Deskripsi Mikrokontroler ATMega 16 ... 28
2.2.4 Peta Memori ATMega 16 ... 29
2.2.4.1 Memori Program ... 29
2.2.4.2 Memori Data ( SRAM ) ... 29
2.2.4.3 Memori Data EEPROM ... 30
2.3 Liquid Crystal Dispaly ( LCD ) ... 30
2.3.1 Konfigurasi PIN LCD ... 31
2.4 Perangkat Lunak ... 32
2.4.1 Code Vision AVR ... 32
BAB III PERANCANGAN DAN PEMBUATAN SISTEM ... 33
3.1 Diagram Blok ... 33
3.2 Rangkaian Mikrokontroler ... 33
3.3 Rangkaian Dispaly LCD ... 35
3.4 Rangkaian GPS ... 36
3.5 Flowchart ... 38
3.6 Rangkaian Lengkap ... 40
BAB IV PENGUJIAN DAN ANALISIS SISTEM ... 41
4.3 Pengujian Program ... 49
4.4 Data Pengujian Argometer Digital ... 52
BAB V KESIMPULAN DAN SARAN ... 54
5.1 Kesimpulan ... 54
DAFTAR GAMBAR
Gambar Halaman
2.1 Macam- macam GPS Receiver ... 5
2.2 Simulasi Posisi Satelite GPS ... 5
2.3 Daerah Kerja GPS ... 8
2.4 Teknik Tringulasi ... 9
2.5 Bagaimana Satelite GPS Mengirim Sinyal ... 10
2.6 Tampilan GPS Receiver ... 11
2.7 Posisi Baik pada Pemetaan ... 16
2.8 Posisi Buruk pada Pemetaan ... 16
2.9 Blok Diagram ATMega 16 ... 27
2.10 Pena-pena ATMega 16 ... 28
2.11 Peta Memori ATMega 16 ... 29
2.12 Konfigurasi Pin LCD ... 31
3.1 Diagram Blok Rangkaian ... 33
3.2 Rangkaian Mikrokontroler ... 34
3.3 Rangkaian LCD Display ... 35
3.4 Rangkaian Modul GPS ... 37
3.6 Flowchart Sistem Kerja Alat ... 38
3.6 Rangkaian Lengkap ... 40
4.1 Diagram Blok Pengujian Mikrokontroler ATMega 16 ... 41
4.2 Kotak Dialog Setting Chip dan Clock ... 42
4.3 Kotak Dialog Setting Chip dan Clock ... 42
4.4 Listing Program Hasil Generate ... 43
4.5 Software Khazama AVR Programer ... 43
4.6 Listing Program untuk Menyalakan LCD ... 44
4.7 Tampilan LCD ... 44
4.8 Tampilan SIRF Demo... 45
4.9 Tampilan Debug View ... 46
DAFTAR TABEL
2.1 Daftar Kalimat NMEA ... 21
2.2 Kalimat GGA ... 22
4.1 Kalimat NMEA pada data GPS ... 47
4.2 Data pengujia pada Argometer Digital ... 52
ABSTRAK
ABSTRACK
BAB I PENDAHULUAN
1.1 LATAR BELAKANG
Pada era teknologi saat ini dimana semakin pesatnya perkembangan dan kemajuan teknologi, maka telah banyak menciptakan alat bantu yang dapat mempermudah dan mempercepat pekerjaan manusia, khususnya dalam bidang transportasi yaitu dalam penentuan harga atau tarif.
Pada umumnya angkutan umum merupakan mode transportasi yang digunakan oleh kalangan masarakat oleh karena itu sering terjadi tindak kejahatan maupun penimpuan yang dilakukan pengemudi atau juga penumpang, Salah satu tindak kejahatan maupun penimpuan yang dilakukan oleh pengemudi adalah perubahan setingan terhadap tarif argometer sehingga tarif akan berdampak lebih mahal. Masalah ini dapat diatasi dengan membuat argometer digital yang menggunakan gps untuk penghitungan jarak sehingga akan mengurangi tindak kecurangan yang sering dilakukan oleh pengemudi dalam menggunakan argometer.
Dalam penggunaan alat ini kebanyakan pemakai hanya mengetahui fungsi dasarnya saja dan tanpa di sadari bahwa alat ini masih mempunyai kegunaan yang dapat di kembangkan untuk lebih menghasilkan fungsi yang lain yang sangat penting. Oleh sebab itu penulis akan mencoba untuk membuat suatu alat yang berjudul
‘‘PERANCANGAN DAN PEMBUATAN ARGOMETER DIGITAL
MENGGUNAKAN GPS’’.
Disini penulis memilih argometer menggunakan gps sebagai alat yang di kembangkan karena sangat mempermudah dan membantu dalam penghitungan harga ataupun tarif pada angkutan umum.
1.2 RUMUSAN MASALAH
2. Sistem kerja argometer digital menggunakan GPS
1.3 BATASAN MASALAH
Mengingat keterbatasan waktu dan dan untuk menghindari topik yang tidak perlu maka penulis membatasi pembahasan pembuatan alat ini. Adapun permasalahan alat ini adalah:
1. Mengetahui prinsip kerja dari alat argometer digital.
2. Mengetahui fungsi dari masing-masing komponen utama yaitu GPS , mikrokontroler, LCD serta komponen pendukung lainnya
3. Mengetahui atau mengukur jarak yang telah ditempuh dalam keadaan lancar atau tanpa kemacetan.
1.4 TUJUAN PENELITIAN
Adapun maksud dan tujuan penulis melakukan penelitian ini adalah:
1. Untuk mengembangkan fungsi dan kerja gps dengan cara membuat argometer digital menggunakan gps
2. Untuk mempermudah pekerjaan dalam menentukan harga atau tarif yang akan digunakan
1.5 MANFAAT PENELITIAN
Adapun mamfaat dari penelitian ini adalah:
1. Mempermudah pekerjaan dalam penentuan harga atau tarif perjalanan dalam mode tranportasi
2. Meningkatkan efisiensi waktu dalam pekerjaan
1.6 Sistematika Penulisan
Untuk memudahkan pembahasan dan pemahaman, maka penulis membuat sistematika pembahasan bagaimana sebenarnya prinsip kerja dari argometer digital dengan
menggunakan Global Positioning System (GPS). Adapun sistematika penulisannya adalah :
BAB 1 PENDAHULUAN
BAB 2 LANDASAN TEORI
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk pembahasan dan cara kerja dari rangkaain teori pendukung lain, bahasa pemograman yang digunakan, serta cara kerja dari modul GPS VK162 untuk mendapatkan data jarak yang berbasis mikrokontroler ATMega16 serta komponen pendukung.
BAB 3 RANCANGAN SISTEM
Analisa rangkaian dan sistem kerja rangkaian, dalam bab ini dibahas tentang sistem kerja per-blok diagram.
BAB 4 PEMBAHASAN RANGKAIAN DAN PROGRAM
Pembahasan rangkaian dan program yang dijalankan serta pengujian rangkaain.
BAB 5 KESIMPULAN DAN SARAN
Pada bab ini merupakan penutup yang meliputi tentang kesimpulan dari pembahasan yang dilakukan serta saran apakah alat dibuat lebih efisien dan dikembangkan.
BAB II
LANDASAN TEORI
2.1 Global Positioning System (GPS)
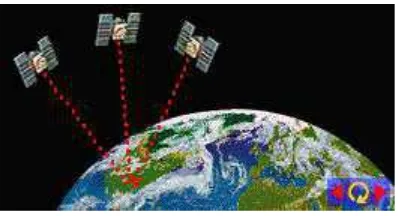
GPS adalah sistem navigasi yang berbasiskan satelit yang saling berhubungan yang berada di orbitnya. Satelit-satelit itu milik Departemen Pertahanan (Departemen of Defense) Amerika Serikat yang pertama kali diperkenalkan mulai tahun 1978 dan pada tahun 1994 sudah memakai 24 satelit. Untuk dapat mengetahui posisi seseorang maka diperlukan alat yang diberinama GPS reciever yang berfungsi untuk menerima sinyal yang dikirim dari satelit GPS. Posisi di ubah menjadi titik yang dikenal dengan nama Way-point nantinya akan berupa titik-titik koordinat lintang dan bujur dari posisi seseorang atau suatu lokasi kemudian di layar pada peta elektronik. Sejak tahun 1980, layanan GPS yang dulunya hanya untuk keperluan militer mulai terbuka untuk publik. Uniknya, walau satelit-satelit tersebut berharga ratusan juta dolar, namun setiap orang dapat menggunakannya dengan gratis. Satelit-satelit ini mengorbit pada ketinggian sekitar 12.000 mil dari permukaan bumi. Posisi ini sangat ideal karena satelit dapat menjangkau area coverage yang lebih luas. Satelit-satelit ini akan selalu berada posisi yang bisa menjangkau semua area di atas permukaan bumi sehingga dapat meminimalkan terjadinya blank spot (area yang tidak terjangkau oleh satelit).
Berikut beberapa contoh perangkat GPS reciever:
Gambar 2.1 Macam-macam GPS Reciever
Untuk menginformasikan posisi user, 24 satelit GPS yang ada di orbit sekitar 12,000 mil di atas kita, bergerak konstan mengelilingi bumi 12 jam dengan kecepatan 7,000 mil per jam. Satelit GPS berkekuatan energi sinar matahari, mempunyai baterai cadangan untuk menjaga agar tetap berjalan pada saat gerhana matahari atau pada saat tidak ada energi matahari. Roket penguat kecil pada masing-masing satelit agar dapat mengorbit tepat pada tempatnya.
Satelit GPS adalah milik Departemen Pertahanan (Department of Defense) Amerika, adapun hal-hal lainnya:
1.Nama satelit adalah NAVSTAR
2.GPS satelit pertama kali adalah tahun 1978
3.Mulai ada 24 satelit dari tahun 1994
4.Satelit di ganti tiap 10 tahun sekali
5.GPS satelit beratnya kira-kira 2,000 pounds
6.Kekuatan transmiter hanya 50 watts atau kurang
Satelit-satelit GPS harus selalu berada pada posisi orbit yang tepat untuk menjaga akurasi data yang dikirim ke GPS reciever, sehingga harus selalu dipelihara agar posisinya tepat. Stasiun-stasiun pengendali di bumi ada di Hawaii, Ascension Islan, Diego Garcia, Kwajalein dan Colorado Spring. Stasiun bumi tersebut selalu memonitor posisi orbit jam jam satelit dan di pastikan selalu tepat.
2.1.1 Signal Satelit GPS
2.1.1.1 Carriers
Satelite GPS mengirim sinyal dalam dua frekuensi. L1 dengan 1575.42 Mhz dengan membawa dua status pesan dan pseudo-random code untuk keperluan perhitungan wakt. L2 membawa 1227.60 MHz dengan menggunakaan presesi yang lebih akurat karena untuk keperluan militer.
2.1.1.2 Pseudo-Random Codes
GPS yang digunakan untuk publik akan memantau frekuensi L1 pada UHF (Ultra High Frequency) 1575,42 MHz. Sinyal L1 yang dikirimkan akan memiliki pola-pola kode digital tertentu yang disebut sebagai pseudorandom. Sinyal yang dikirimkan terdiri dari dua bagian yaitu kode Protected (P) dan Coarse/Acquisition (C/A). Kode yang dikirim juga unik antar satelit, sehingga memungkinkan setiap receiver untuk membedakan sinyal yang dikirim oleh satu satelit dengan satelit lainnya. Beberapa kode Protected (P) juga ada yang diacak, agar tidak dapat diterima oleh GPS biasa. Sinyal yang diacak ini dikenal dengan istilah Anti Spoofing, yang biasanya digunakan oleh GPS khusus untuk keperluan tertentu seperti militer.
2.1.1.3 Navigation Message
Ada sinyal frekuensi berkekuatan lemah yang di tambahkan pada kode L1 yang memberikan informasi tentang orbit satelit, clock corectionnya dan status sistem lainnya.
2.1.2 Bagian-bagian Daerah Kerja GPS
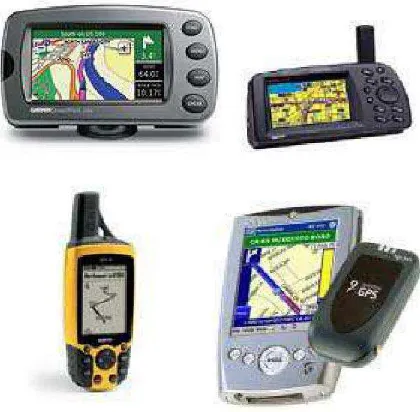
GPS terdiri atas tiga segmen yaitu space segment, control segment, user segment, dengan penjelasan sebagai berikut:
1. Space Segment
Space segment terdiri atas konstelasi 24 satelit. Masing-masing satelit mengirimkan sebuah sinyal, yang memiliki sejumlah komponen: dua buah gelombang sinus (yang juga dikenal sebagai carrier frequency / frekuensi pembawa), dua kode digital, dan sebuah pesan navigasi.
Pesan kode dan navigasi ditambahkan ke dalam pembawa sebagai modulasi dua fasa biner. Pembawa dan kode digunakan terutama untuk menentukan jarak dari receiver pengguna sampai ke satelit GPS. Pesan nagivasi berisi koordinat (lokasi) satelit sebagai fungsi waktu bersama dengan informasi-informasi lain.
2. Control Segment
di dekat Colorado Springs, Colorado, Amerika Serikat. Tugas utama segmen kontrol operasional adalah menjejaki satelit GPS dengan tujuan untuk menentukan dan memprediksikan lokasi satelit, integritas sistem, jam atom satelit, data atmosfer, perkiraan satelit, dan pertimbangan-pertimbangan lain. Informasi ini kemudian digabungkan dan di-upload ke satelit GPS melalui jalur S- band.
3. User Segment
User segment mencakup semua pengguna baik militer maupun sipil. Dengan sebuah penerima GPS yang terhubung dengan antena GPS, seorang pengguna dapat menerima sinyal GPS, yang dapat digunakan untuk menentukan posisi pengguna tersebut di manapun di bumi. Saat ini GPS tersedia bagi siapapun di seluruh dunia tanpa biaya apapun.
Gambar 2.3 Daerah Kerja GPS
2.1.3 Cara Kerja GPS
menangkap sinyal yang dikirimkan oleh satelit. Semakin banyak satelit yang diterima oleh GPS, maka akurasi yang diberikan juga akan semakin tinggi.
Cara kerja GPS secara logik ada 5 langkah:
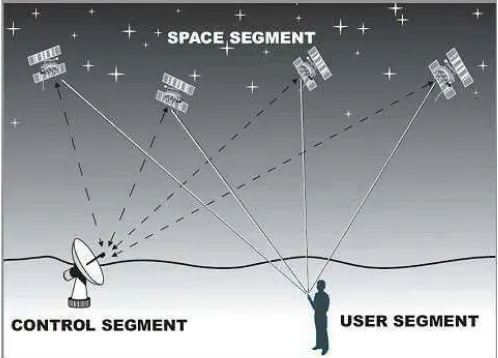
1. Memakai perhitungan “triangulation” dari satelit.
2. Untuk perhitungan “triangulation”, GPS mengukur jarak menggunakan travel time sinyal radio.
3. Untuk mengukur travel time, GPS memerlukan akurasi waktu yang tinggi.
4. Untuk perhitungan jarak, kita harus tahu dengan pasti posisi satelit dan ketingian pada orbitnya.
5. Terakhir harus menggoreksi delay sinyal waktu perjalanan di atmosfer sampai diterima reciever.
Konsep triangulasi dapat dianalogikan seperti berikut. A ingin datang ke di Gedung G, A tidak tahu di mana letak gedung itu. Ia hanya punya informasi bahwa Gedung G terletak 10 km dari Universitas X, 15 km dari Pasar Y dan 20 km dari Terminal Z. Dengan menggambar tiga lingkaran yang berpusat di Universitas X, Pasar Y dan Terminal Z, masing-masing dengan radius 10, 15 dan 20 km. Di titik perpotongan ketiga lingkaran itulah terletak Gedung G. Dalam hal ini, alat penerima akan berada pada titik potong tiga bidang bola; masing-masing dengan radius sebesar jarak alat penerima ke satelit, dengan satelit itu sebagai pusat bola. Dengan demikian, posisi titik itu dapat diketahui dengan titik perpotongan ketiga lingkaran tersebut.
Pada praktiknya, satelit yang digunakan minimum 3 buah dan satelit keempat dibutuhkan untuk perhitungan sinkronisasi clock dari penerima GPS. Akurasi yang diperoleh dengan metode ini terbatas pada 100 meter untuk komponen horizontal, 156 meter untuk vertikal, dan 340 nanodetik untuk komponen waktu, semua pada tingkat probabilitas sebesar 95%. Tingkat keakuratan yang rendah ini diakibatkan oleh teknik selective availability, yaitu teknik yang digunakan untuk menurunkan akurasi posisi waktu nyata bagi pengguna yang tak berhak. Dengan keputusan pemerintah Amerika Serikat tanggal 1 Mei 2000 untuk penghentian selective availability, akurasi horizontal dapat naik menjadi 22 meter (dengan tingkat probabilitas 95%). Untuk lebih lagi meningkatkan akurasi GPS, digunakan metode diferensial, yang menggunakan dua alat penerima bersamaan. Dalam kasus ini, tingkat keakuratan yang diperoleh mencapai beberapa meter saja.
Gambar 2.5 Bagaimana Satelit GPS Mengirim Sinyal
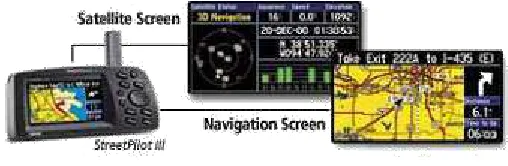
Gambar 2.6 Tampilan GPS Reciever
Sebuah GPS reciever harus mengunci sinyal minimal tiga satelit untuk memenghitung posisi 2D (latitude dan longitude) dan track pergerakan. Jika GPS reciever dapat menerima empat atau lebih satelit, maka dapat menghitung posisi 3D (latitude, longitude dan altitude). Jika sudah dapat menentukan posisi user, selanjutnya GPS dapat menghitung informasi lain, seperti kecepatan, arah yang dituju, jalur, tujuan perjalanan, jarak tujuan, matahari terbit dan matahari terbenam dan masih banyak lagi. Satelit GPS dalam mengirim informasi waktu sangat presesi karena Satelit tersebut memakai jam atom. Jam atom yang ada pada satelit jalan dengan partikel atom yang di isolasi, sehingga dapat menghasilkan jam yang akurat dibandingkan dengan jam biasa.
Perhitungan waktu yang akurat sangat menentukan akurasi perhitungan untuk menentukan informasi lokasi kita. Selain itu semakin banyak sinyal satelit yang dapat diterima maka akan semakin presesi data yang diterima karena ketiga satelit mengirim pseudo-random code dan waktu yang sama. Ketinggian itu menimbulkan keuntungan dalam mendukung proses kerja GPS, bagi kita karena semakin tinggi maka semakin bersih atmosfer, sehingga gangguan semakin sedikit dan orbit yang cocok dan perhitungan matematika yang cocok. Satelit harus tetap pada posisi yang tepat sehingga stasiun di bumi harus terus memonitor setiap pergerakan satelit, dengan bantuan radar yang presesi selalu di cek tentang altitude, posision dan kecepatannya.
2.1.4 Menentukan Posisi dari Receiver ke Satelit GPS
KECEPATAN x WAKTU = JARAK
Keterangan:
Kecepatan = kecepatan gelombang mikro yang dikirimkan dari satelit, Waktu = waktu yang dibutuhkan dari satelit mengirimkan sinyal
hingga diterima GPS receiver,
Jarak = jarak antara satelit dengan GPS receiver.
Dari diketahui jarak antara receiver dengan satelit, maka dapat ditentukan posisi receiver dengan cara mengirimkan balik sinyal ke satelit sehingga membentuk suatu lingkaran dari ketiga satelit yang ada.
2.1.5 TTFF (Time to First Fix)
TTFF (Time to First Fix) adalah waktu yang diperlukan oleh sebuah GPS receiver untuk mengetahui posisinya saat ini. TTFF bergantung pada mode boot up mode GPS apakah hot start, warm start, atau cold start.
Secara umum factor-faktor yang mempengaruhi boot mode antara lain sebagai berikut: • Adanya data almanac dan ephemeris yang valid.
• Kuat sinyal yang diterima receiver.
• Posisi receiver dari tempat terakhir dimana dia fix atau memperoleh data yang valid (sekitar 100 km dari tempat terakhir dia memperoleh data yang valid).
• Waktu terakhir fix atau memperoleh data yang valid.
subframe dengan lama 6 detik dan panjang 300 bit. Setiap subframe terdiri dari 10 words yang masing-masing terdiri dari 30 bit dengan masing-masing memerlukan 0,6 detik untuk dikirimkan.
Word 1 dan 2 dari setiap subframe memiliki tipe data yang sama. Word pertama mengindikasikan awal dari sebuah subframe dan digunakan oleh receiver untuk melakukan sinkronisasi dengan pesan navigasi. Word kedua merupakan handover word yang memiliki informasi waktu yang memungkinkan receiver untuk mengidentifikasi subframe dan memberitahukan waktu pengiriman subframe selanjutnya.
Word 3 sampai 10 dari subframe 1 terdiri atas data yang menjelaskan clock satelit dan hubungan dengan waktu GPS. Word 3 sampai 10 dari subframe 2 dan 3 terdiri dari data ephemeris yang menunjukkan letak pasti dari satelit tersebut. Data ephemeris diperbaharui setiap sekitar 2 jam.
Almanac terdiri dari posisi kasar (tidak begitu akurat) dan informasi status dari setiap satelit. Word 3 sampai 10 pada subframe 4 dan 5 terdiri dari sebuah bagian baru dari data almanac. Setiap frame memiliki 1/25 data almanac sehingga diperlukan waktu selama 12,5 menit untuk memperoleh almanac keseluruhan dari tiap satu satelit. Data almanac memiliki beberapa fungsi yakni untuk membantu penemuan satelit pada penyalaan atau membantu untuk memprediksi satelit mana yang terlihat dengan mengizinkan receiver untuk memberikan daftar satelit yang terlihat berdasarkan posisi dan waktu yang tersimpan sehingga mempersingkat waktu akuisisi. Data almanac akan disimpan di non-volatile memory. Sementara itu data ephemeris dari setiap satelit diperlukan untuk menghitung posisi menggunakan satelit tersebut. Jika receiver tidak memiliki data almanac maka akan menyebabkan waktu delay yang lama sebelum memperoleh posisinya yang valid karena dilakukan pencarian terhadap masing-masing satelit merupakan proses yang lambat.
Ketika sebuah GPS receiver sudah pernah fix dan dimatikan, posisi dan data yang valid akan disimpan. Ketika receiver dihidupkan kembali, dia akan berusaha untuk menggunakan informasi yang telah tersimpan dalam almanac untuk memprediksi satelit mana yang terlihat. Jika receiver telah berpindah terlalu jauh atau internal clock sudah tidak aktif (GPS tidak aktif dari 3 hari sebelumnya), maka data yang tersimpan tidak dapat digunakan untuk membantu memprediksi lokasi satelit.
• Mode Cold Start
GPS melakukan start up dalam mode ini ketika:
Receiver telah berpindah lebih dari 100 km dari lokasi fix terakhir. Waktu saat ini tidak akurat atau tidak diketahui.
Sinyal yang diterima lemah. Satelit yang diprediksi secara fisik ada di atas atau terlihat tetapi receiver tidak bisa melihatnya misalnya karena adanya bangunan yang tinggi atau halangan lainnya.
Situasi-situasi seperti di atas memiliki arti bahwa receiver tidak bisa memprediksi dan/atau membuktikan satelit mana yang terlihat. Receiver kemudian mencari semua satelit dan mencoba untuk memperolehnya secara bergantian. TTFF untuk cold start bisa mencapai belasan menit.
• Mode Warm Start
GPS melakukan start up dalam mode ini ketika:
Memiliki almanac yang valid.
Lokasi saat ini tidak lebih dari 100 km dari lokasi fix terakhir.
Waktu saat ini diketahui (GPS pernah aktif dalam tiga hari terakhir).
Tidak ada data ephemeris yang tersimpan.
Terdapat 4 atau lebih satelit dengan HDOP < 6 dan kekuatan sinyal yang bagus (misalnya satelit memiliki geometri yang bagus dan bisa melihat langit secara langsung).
Receiver bisa memprediksi satelit mana yang terlihat tetapi perlu untuk memperoleh data ephemeris saat ini terlebih dahulu. TTFF untuk mode start ini biasanya sekitar 45 detik.
• Mode Hot Start
GPS receiver start up dengan mode hot start jika kondisi warm start terpenuhi dan ketika:
Sudah fix dalam 2 jam terakhir.
Dalam mode ini, receiver dengan cepat mengetahui satelit yang terlihat dan hanya perlu memperoleh data yang sedikit untuk mengetahui posisinya. TTFF untuk hot start biasanya 22 detik.
TTFF bisa juga dipengaruhi oleh konstelasi atau posisi satelit. Semakin banyak satelit dalam lokasi yang bagus mengurangi TTFF dan meningkatkan akurasi. Minimal dibutuhkan 4 satelit untuk fix. Dengan 5 atau lebih dibutuhkan untuk kualitas fix yang lebih bagus.
GPS bekerja dengan konsep triangulasi. Satelit yang berada tepat di atas (sudut elevasi 90o) memberikan hasil yang lebih tidak akurat dibandingkan dengan satelit dengan sudut elevasi yang lebih rendah. Namun sinyal dari satelit yang terlalu lemah pada langit yang harus melewati atmosfer bumi akan mengurangi akurasi juga.
2.1.6 Ketidak Akuratan pada GPS
Sistem GPS telah didesain untuk seakurat mungkin, tetapi masih ada penyimpangan yang terjadi. Ada banyak penyebab dari penyimpangan ini, yaitu :
1. Kondisi Atmosfer
Kondisi atmosfer yang berubah mengakibatkan kecepatan sinyal GPS berubah karena sinyal tersebut melewati atmosfer bumi dan ionosfer sehingga kecepatan gelombang mikro dari satelit akan berubah, yang akan mempengaruhi perhitungan jarak menjadi tidak akurat.
2. Ephemeris Error dan Clock Error
Sinyal pada GPS membawa informasi tentang error pada ephemeris (posisi secara orbital).
3. Selective Availabilty
4. Multipath
Signal yang mengalami pantulan akibat memasuki atmosfer bumi ketika menuju ke antena GPS.
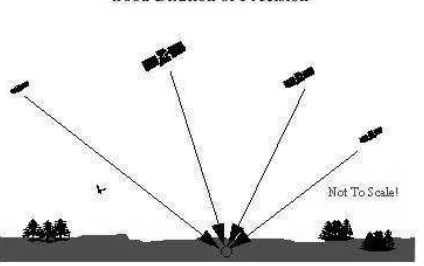
5. Dilution Of Precision (DOP)
DOP merupakan sebuah indikator kualitas dari geometri pada konstelasi satelit. Perhitungan sebuah posisi bisa berbeda-beda tergantung pada satelit mana yang sedang digunakan. Perbedaaan geometri satelit bisa memperbesar atau bahkan memperkecil error pada GPS. Semakin besar sudut antara satelit yang satu dengan yang lainnya maka akan memperkecil nilai DOP, dan menghasilkan pengukuran yang lebih baik. Nilai yang tinggi pada DOP berarti mengindikasikan geometri yang buruk pada satelit.
Gambar 2.7 Posisi Baik pada Pemetaan
2.1.7 Bagaimana Sinyal dapat Menentukan Lokasi
Apa hubungan antara sinyal yang dikirimkan oleh satelit dengan cara GPS menentukan lokasi? Sinyal yang dikirimkan oleh satelit ke GPS akan digunakan untuk menghitung waktu perjalanan (travel time). Waktu perjalanan ini sering juga disebut sebagai Time of Arrival (TOA). Sesuai dengan prinsip fisika, bahwa untuk mengukur jarak dapat diperoleh dari waktu dikalikan dengan cepat rambat sinyal.
Maka, jarak antara satelit dengan GPS juga dapat diperoleh dari prinsip fisika tersebut. Setiap sinyal yang dikirimkan oleh satelit akan juga berisi informasi yang sangat detail, seperti orbit satelit, waktu, dan hambatan di atmosfir. Satelit menggunakan jam atom yang merupakan satuan waktu paling presisi.
Untuk dapat menentukan posisi dari sebuah GPS secara dua dimensi (jarak), dibutuhkan minimal tiga buah satelit. Empat buah satelit akan dibutuhkan agar didapatkan lokasi ketinggian (secara tiga dimensi). Setiap satelit akan memancarkan sinyal yang akan diterima oleh GPS receiver. Sinyal ini akan dibutuhkan untuk menghitung jarak dari masing-masing satelit ke GPS. Dari jarak tersebut, akan diperoleh jari-jari lingkaran jangkauan setiap satelit. Lewat perhitungan matematika yang cukup rumit, interseksi (perpotongan) setiap lingkaran jangkauan satelit tadi akan dapat digunakan untuk menentukan lokasi dari GPS di permukaan bumi.
2.1.8 Manfaat GPS
Dengan teknologi GPS dapat digunakan untuk beberapa keperluan sesuai dengan tujuannya. GPS dapat digunakan oleh peneliti, olahragawan, petani, tentara, pilot, petualang, pendaki, pengantar barang, pelaut, kurir, penebang pohon, pemadam kebakaran dan orang dengan berbagai kepentingan untuk meningkatkan produktivitas, keamanan, dan untuk kemudahan.
Dari beberapa pemakaian di atas dikategorikan menjadi:
Lokasi
Digunakan untuk menentukan dimana lokasi suatu titik dipermukaan bumi berada. Jenis program :
$GPAAM : Waypoint Arrival Alarm
$GPGGA : Global Positioning System Fix Data
Navigasi
Membantu mencari lokasi suatu titik di bumi
Tracking
Membantu untuk memonitoring pergerakan obyek
Membantu memetakan posisi tertentu, dan perhitungan jaringan terdekat
Timing
Dapat dijadikan dasar penentuan jam seluruh dunia, karena memakai jam atom yang jauh lebih presesi di banding dengan jam biasa.
Jenis Program :
$GPZDA : UTC Date / Time and Local Time Zone Offset
$GPZFO : UTC & Time from Origin Waypoint
Tidak perduli posisi Anda, di tengah laut, di tengah hutan, di atas gunung, ataupun di pusat kota. Selama GPS dapat menerima sinyal dari satelit secara langsung tanpa halangan, maka GPS akan selalu memberikan informasi koordinat posisi Anda. GPS membutuhkan area pandang yang bebas langsung ke langit. Halangan-halangan seperti pohon, gedung, bahkan kaca film sekelas V-Kool, bisa mengurangi akurasi sinyal yang diterima oleh GPS. Bahkan bukan tidak mungkin GPS tidak bisa menerima sinyal sama sekali dari satelit. GPS juga memiliki feature tambahan yang mampu memberikan informasi selama Anda di perjalanan, seperti kecepatan, lama perjalanan, jarak yang telah ditempuh, waktu, dan masih banyak.
2.1.9 Model dan Interkoneksi GPS
Sebuah GPS juga memiliki firmware yang bisa di-upgrade. Upgrade firmware ini biasanya disediakan pada site produsen GPS tersebut. Upgrade firmware biasanya menggunakan kabel yang dibundel atau-pun tersedia sebagai asesoris. Kabel ini juga ternyata bisa digunakan untuk menghubungkan GPS ke komputer (baik itu notebook, PC, maupun PDA dengan sedikit bantuan konverter). Software GPS yang tersedia untuk berbagai platform tersebut juga cukup banyak. Dengan software tersebut, Anda dapat dengan mudah mendownload informasi dari GPS. Memori sebuah GPS memang relatif terbatas, sehingga kemampuan ekstra untuk menyimpan informasi yang pernah Anda tempuh ke PC/PDA (yang biasanya memiliki memori lebih besar) tentu akan sangat menyenangkan. Untuk media komunikasi GPS dengan hardware lain selain kabel, model GPS sekarang juga ada yang dilengkapi dengan Bluetooth, Infrared.
Berdasarkan fisik, model GPS dibagi menjadi beberapa tipe antara lain model portable/handheld (ukurannya menyerupai ponsel), ada yang lebih besar (biasanya dimount di mobil/kapal), ada pula yang menggunakan interface khusus untuk dikoneksikan ke notebook maupun PDA (Palm, Pocket PC maupun Nokia Com-municator).
GPS untuk keperluan out-door biasanya juga dilengkapi dengan perlindungan anti air dan tahan benturan. Beberapa GPS keluaran terakhir bahkan sudah menyediakan layar warna dan kemampuan komunikasi radio jarak pendek (FRS/Family Radio Service).
di komputer kembali ke GPS. Selanjutnya, Anda akan mendapatkan rekaman perjalanan Anda terdahulu. Lokasi dan track yang pernah Anda kunjungi akan dapat Anda temui kembali dengan cepat, dan tentu saja meminimalkan resiko tersesat.
2.1.10 Format Kalimat GPS
Perusahaan-perusahaan pembuat GPS memiliki format kalimat masing- masing untuk menyimpan hasil pengukuran GPS, sehingga sulit untuk menggabungkan data dari alat GPS yang berbeda. Masalah yang mirip terjadi saat ingin melakukan antar-muka terhadap berbagai alat yang berbeda, termasuk sistem GPS. Untuk mengatasi masalah ini, banyak peneliti yang membuat format standar untuk berbagai keperluan penggunanya. Format standar yang banyak digunakan saat ini ada empat, yaitu:
1. RINEX
RINEX dibuat oleh sekelompok peneliti untuk mengatasi kesulitan mengkombinasikan data biner dari penerima GPS yang berbeda. Data RINEX merupakan format standar ASCII, sehingga memakan tempat yang lebih banyak dalam penyimpanannya.
2. NGS-SP3
NGS-SP3 dibangun oleh U.S. NGS yang merupakan akronim dari Standard Product #3, yang datanya berupa dokumen ASCII yang berisi data orbital yang presisi dan koreksi clock satelit yang bersangkutan.
3. RTCM SC-104 untuk Layanan DGPS
Format ini merupakan format standar industri untuk mengirimkan koreksi waktu nyata DGPS yang diajukan oleh Radio Technical Commission for Maritime Services untuk memastikan operasi yang efisien dan koreksi pseudorange.
4. NMEA 0183
Tipe String:
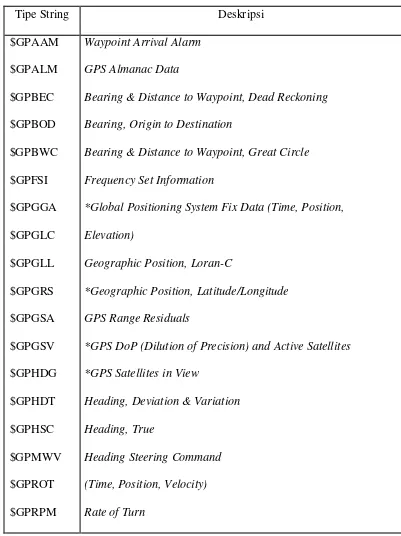
Tabel 2.1 Daftar kalimat NMEA
Tipe String Deskripsi $GPAAM Waypoint Arrival Alarm
$GPALM GPS Almanac Data
$GPBEC Bearing & Distance to Waypoint, Dead Reckoning $GPBOD Bearing, Origin to Destination
$GPBWC Bearing & Distance to Waypoint, Great Circle $GPFSI Frequency Set Information
$GPGGA *Global Positioning System Fix Data (Time, Position, $GPGLC Elevation)
$GPGLL Geographic Position, Loran-C
$GPGRS *Geographic Position, Latitude/Longitude $GPGSA GPS Range Residuals
$GPGSV *GPS DoP (Dilution of Precision) and Active Satellites $GPHDG *GPS Satellites in View
$GPHDT Heading, Deviation & Variation $GPHSC Heading, True
2.1.11 GGA (Global Positioning System Fix Data)
Kalimat GGA menyediakan lokasi 3 dimensi. Format kalimatnya adalah:
• Data tidak valid
Tabel 2.2 Kalimat GGA
Istilah Sintak Satuan Penjelasan
Sintak $GPGGA GGA protokol
Waktu UTC 161229.49 hhmmss.sss Garis Lintang 3723.2475 ddmm.mmmm
Indikator N/S N N=north(utara) atau S=south(selatan) Garis Bujur 12158.342 dddmm.mmmm
Indikator W/E W E= east(timur) atau W=west(barat) Indikator Posisi 1
Satelit yang
Digunakan 07
HDOP 1.0
Ketinggian Terhadap Horizontal Dilution of Precision Air Laut 9.0 meter (error secara horizontal)
Satuan M meter
Satuan M meter
Age of Diff. Corr. kosong bila DGPS tidak digunakan
Diff. Ref. Station ID 0000
Checksum *18 Pegnecekan error <CR> <LF> Akhir dari pesan
2.1.12 Istilah-istilah yang Penting
Beberapa istilah penting yang penting untuk diketahui yang berhubungan dengan GPS:
Waypoint: Istilah yang digunakan oleh GPS untuk suatu lokasi yang telah ditandai. Waypoint terdiri dari koordinat lintang (latitude ) dan bujur (longitude ). Sebuah waypoint biasa digambarkan dalam bentuk titik dan simbol sesuai dengan jenis lokasi.
Mark: Menandai suatu posisi tertentu pada GPS.Jika Anda menandai lokasi menjadi waypoint,maka dikatakan Anda melakukan marking.
Route: Kumpulan waypoint yang ingin Anda tempuh secara berurutan dan dimasukkan ke dalam GPS.
Track: Arah perjalanan yang sedang Anda tempuh dengan menggunakan GPS. Biasanya digambarkan berupa garis pada display GPS.
Elevation: Istilah pada GPS untuk menentukan ketinggian. Ada dua jenis pengukur ketinggian pada GPS, yaitu menggunakan alat klasik ‘barometer ’ atau menggunakan perhitungan satelit. Pengukuran ketinggian menggunakan barometer jauh lebih akurat di udara bebas,namun tidak bisa bekerja dalam pesawat atau ruang vakum lainnya.Ini disebabkan oleh perbedaan tekanan udara dalam ruang vakum dengan tekanan udara di luar. Pengukuran ketinggian menggunakan satelit akan lebih akurat pada tempat seperti itu.
Heading: Arah aktual yang sedang dijalankan. Contohnya, saat menuju ke posisi A tadi, Anda menemui halangan sehingga harus memutar ke Selatan terlebih dahulu, maka Anda heading Anda pada saat itu adalah Selatan.
2.1.13 Metode Penghitungan Jarak GPS
2.1.13.1 Metode Euclidean
Jarak merupakan selisih dari posisi awal dan posisi akhir. Pada kasus ini akan dilakukan pengukuran jarak dengan hanya mengetahui koordinat bumi yang disebut kordinat lintang dan bujur.Metode Euclidean adalah suatu metode pencarian kedekatan nilai jarak dari 2 buah variabel, selain mudah metode ini juga tidak memakan waktu proses yang cepat. Mengukur jarak adalah bagian penting dari model vector berdasarkan deskriptor dua komponen, label jarak untuk setiap titik, terlihat bahwa peta jarak Euclidean dapat dihasilkan oleh algoritma sekuensial yang efektif. Dua buah titik p1 = (x1, y1) dan p2 = (x2, y2), jaraknya adalah
n : jarak
x1 : kordinat latitude titik 1 x2 : kordinat latitude titik 2 y1 : kordinat longitude titik 1 y2 : kordinat longitude titik 2
hasil dari perhitungan tersebut di kalikan dengan 111.319 untuk mendapatkan dalam satuan Km. Nilai 111.319 diperoleh dari konversi 1 drajat bumi kedalam kilometer.
sehingga penulisan program pengukuran euclidean dalam codevision AVR seperti berikut
2.1.14 Data GPS
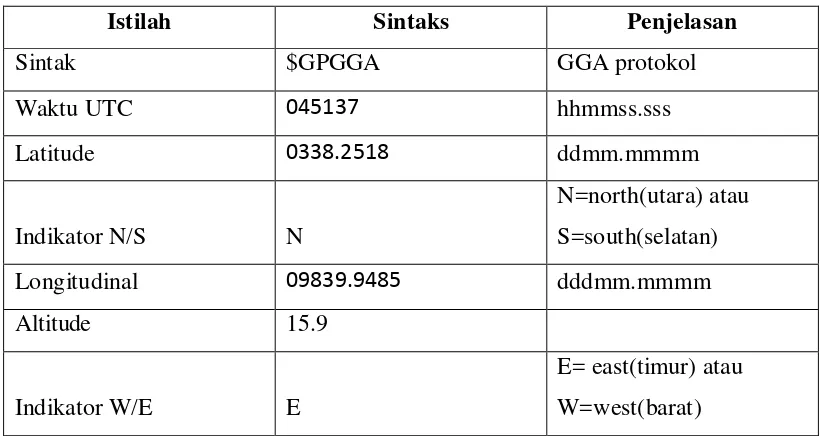
Data yang dihasilkan oleh GPS akan dikirim ke mikrokontroler ATMega 16 untuk di proses, dimana data yang di dapat oleh GPS dapat berupa $GPAAM , $GPALM, $GPGGA, $GPGSV , $ GPRMC. Dimana data yang akan di proses oleh mikrokontroler ATMega 16 adalah data posisi dari GPS adalah data $GPGGA.
$GPGGA,045137.000,0338.2518,N09839.9485,E,1,03,2.3,233.6,M,-15.9,M,,0000*40
Dimana data yang telah di peroleh dari gps akan diproses oleh mikrokntroler berupa data latitude dan data longitudinal.
Tabel 2.3 Penjelasan GGA yang diterima mikrokontroler
Istilah Sintaks Penjelasan
Sintak $GPGGA GGA protokol Waktu UTC 045137 hhmmss.sss Latitude 0338.2518 ddmm.mmmm
Indikator N/S N
N=north(utara) atau S=south(selatan) Longitudinal 09839.9485 dddmm.mmmm Altitude 15.9
Indikator W/E E
E= east(timur) atau W=west(barat)
2.2 ATMega 16
mikrokontroler RISC (Reduce Instuction Set Compute) 8 bit berdasarkan arsitektur Harvard. Secara umum mikrokontroler AVR dapat dapat dikelompokkan menjadi 3 kelompok, yaitu keluarga AT90Sxx, ATMega dan ATtiny. Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral, dan fiturnya Seperti mikroprosesor pada umumnya, secara internal mikrokontroler ATMega16 terdiri atas unit-unit fungsionalnya Arithmetic and Logical Unit (ALU), himpunan register kerja, register dan dekoder instruksi, dan pewaktu serta komponen kendali lainnya. Berbeda dengan mikroprosesor, mikrokontroler menyediakan memori dalam chip yang sama dengen prosesornya (in chip).
2.2.1 Arsitektur ATMega 16
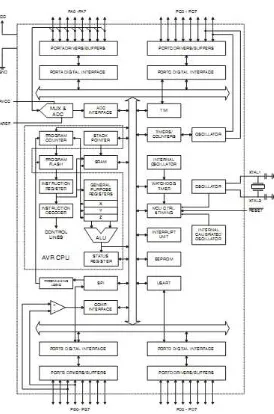
Mikrokontroler ini menggunakan arsitektur Harvard yang memisahkan memori program dari memori data, baik bus alamat maupun bus data, sehingga pengaksesan program dan data dapat dilakukan secara bersamaan (concurrent), adapun blog diagram arsitektur ATMega16. Secara garis besar mikrokontroler ATMega16 terdiri dari :
1. Arsitektur RISC dengan throughput mencapai 16 MIPS pada frekuensi 16Mhz. 2. Memiliki kapasitas Flash memori 16Kbyte, EEPROM 512 Byte, dan SRAM 1Kbyte 3. Saluran I/O 32 buah, yaitu Port A, Port B, Port C, dan Port D.
4. CPU yang terdiri dari 32 buah register. 5. User interupsi internal dan eksternal
6. Port antarmuka SPI dan Port USART sebagai komunikasi serial 7. Fitur Peripheral
Dua buah 8-bit timer/counter dengan prescaler terpisah dan mode compare
• Satu buah 16-bit timer/counter dengan prescaler terpisah, mode compare, dan mode capture
• Real time counter dengan osilator tersendiri
• Empat kanal PWM dan Antarmuka komparator analog • 8 kanal, 10 bit ADC
Gambar 2.9 Blok diagram ATMega16
2.2.2. KONFIGURASI PENA (PIN) ATMEGA 16
Gambar 2.10 Pena-Pena Atmega16 2.2.3 Deskripsi Mikrokontroler ATMega 16
• VCC (Power Supply) dan GND(Ground)
• Port A (PA7..PA0)
Port A berfungsi sebagai input analog pada konverter A/D. Port A juga sebagai suatu port I/O 8-bit dua arah,
• Port B (PB7..PB0)
Pin B adalah suatu pin I/O 8-bit dua arah dengan resistor internal pull-up (yang dipilih untuk beberapa bit).
• Port C (PC7..PC0)
Pin C adalah suatu pin I/O 8-bit dua arah dengan resistor internal pull-up (yang dipilih untuk beberapa bit).
• Port D (PD7..PD0)
Pin D adalah suatu pin I/O 8-bit dua arah dengan resistor internal pull-up (yang dipilih untuk beberapa bit). Pin D adalah tri-stated manakala suatu kondisi reset menjadi aktif, sekalipun waktu habis.
• XTAL2 (Output Oscillator)
• AVCC adalah pin penyedia tegangan untuk Port A dan Konverter A/D. • AREF adalah pin referensi analog untuk konverter A/D.
2.2.4 Peta Memori ATMega 16 2.2.4.1 Memori Program
Arsitektur ATMega16 mempunyai dua memori utama, yaitu memori data dan memori program. Selain itu, ATMega16 memiliki memori EEPROM untuk menyimpan data.
ATMega16 memiliki 16K byte On-chip In-System Reprogrammable Flash Memory untuk menyimpan program. Instruksi ATMega16 semuanya memiliki format 16 atau 32 bit, maka memori flash diatur dalam 8K x 16 bit. Memori flash dibagi kedalam dua bagian, yaitu bagian program boot dan aplikasi. Bootloader adalah program kecil yang bekerja pada saat sistem dimulai yang dapat memasukkan seluruh program aplikasi ke dalam memori prosesor.
Gambar 2.11 Peta Memori ATMega16
2.2.4.2 Memori Data (SRAM)
register,timer/counter, fungsi-fungsi I/O, dan sebagainya. 1024 alamat berikutnya mulai dari $60 hingga $45F digunakan untuk SRAM internal.
2.2.4.3 Memori Data EEPROM
ATMega16 terdiri dari 512 byte memori data EEPROM 8 bit, data dapat ditulis/dibaca dari memori ini, ketika catu daya dimatikan, data terakhir yang ditulis pada memori EEPROM masih tersimpan pada memori ini, atau dengan kata lain memori EEPROM bersifat nonvolatile. Alamat EEPROM mulai dari $000 sampai $1FF.
2.3 Liquid Crystal Display ( LCD )
LCD merupakan perangkat display yang paling umum dipasangkan ke mikrokontroler, mengingat ukurannya yang kecil dan kemampuan menampilkan karakter atau grafik yang lebih baik dibandingkan display seven segment ataupun alphanumerik. Pada pengembangan sistem embedded, LCD mutlak diperlukan sebagai sumber pemberi informasi utama, misalnya alat pengukur kadar gula darah, penampil jam, penampil counter putaran motor industry, dan lainnya.
2.3.1 Konfigurasi PIN LCD
Konfigurasi pin dari LCD ditunjukkan pada Gambar dibawah ini
Gambar 2.12 Konfigurasi PIN LCD
Modul LCD memiliki karakteristik sebagai berikut: • Terdapat 16 x 2 karakter huruf yang bisa ditampilkan. • Setiap huruf terdiri dari 5x7 dot-matrix cursor.
• Terdapat 192 macam karakter.
• Terdapat 80 x 8 bit display RAM (maksimal 80 karakter).
• Memiliki kemampuan penulisan dengan 8 bit maupun dengan 4 bit. • Dibangun dengan osilator lokal.
• Satu sumber tegangan 5 volt.
• Otomatis reset saat tegangan dihidupkan. • Bekerja pada suhu 0oC sampai 55oC.
Register control yang terdapat dalam suatu LCD diantaranya adalah:
a. Register Perintah yaitu register yang berisi perintah-perintah dari mikrokontroler ke panel LCD pada saat proses penulisan data atau tempat status dari panel LCD dapat dibaca pada saat pembacaan data.
2.4 Perangkat Lunak
2.4.1 Code Vision AVR
Code Vision AVR merupakan salah satu software kompiler yang khusus digunakan untuk mikrokontroler keluarga AVR. Code Vision AVR merupakan yang terbaik bila dibandingkan dengan kompiler-kompiler yang lain karena beberapa kelebihan yang dimiliki oleh Code Vision AVR antara lain:
1. Menggunakan IDE (Integrated Development Environment).
2. Fasilitas yang disediakan lengkap (mengedit program, mengkompile program, mendownload program) serta tampilannya terlihat menarik dan mudah dimengerti. Kita dapat mengatur settingan editor sedemikian rupa sehingga membantu memudahkan kita dalam penulisan program.
3. Mampu membangkitkan kode program secara otomatis dengan menggunakan fasilitas CodeWizardAVR.
4. Memiliki fasilitas untuk mendownload program langsung dari Code VisionAVR dengan menggunakan hardware khusus seperti Atmel STK500, Kanda System STK200+/300 dan beberapa hardware lain yang telah didefinisikan oleh CodeVision AVR.
5. Memiliki fasilitas debugger sehingga dapat menggunakan software compiler lain untuk mengecek kode assembler nya, seperti AVR studio.
6. Memiliki terminal komunikasi serial yang terintegrasi dalam CodeVisionAVR sehingga dapat digunakan untuk membantu pengecekan program yang telah dibuat khususnya yang menggunakan fasilitas komunikasi serial UART.
BAB III
PERANCANGAN DAN PEMBUATAN SISTEM
3.1 DIAGRAM BLOK
Gambar 3.1 Diagram blok rangkaian
Perancangan ini bertujuan untuk membuat suatu alat yang dapat seoptimal mungkin berinteraksi dengang satelit yang ada diluar angkasa. Kondisi ini dilakukan jika modul GPS menerima gelombang dari satelit berupa gelombang mikro.
Fungsi tiap blok
1. Blok GPS : Sebagai input data
2. Blok mikrokontroler : Mengkonversi data dari GPS 3. Blok LCD : Sebagai keluaran atau tampilan
3.2 Rangkaian Mikrokontroler
Rangkaian ini merupakan rangkaian mikrokontroler ATmega16 ditujukan untuk menerima dan memproses data dari GPS V.KEL VK162 kemudian menampilkan hasil keluaran pada LCD. Gambar rangkaian sistem minimum ATmega16 dapat di lihat pada gambar 3.2
AT Mega 16 LCD
Gambar 3.2 Rangkaian Mikrokontroler
Rangkaian ini berfungsi sebagai pusat kendali dari seluruh sistem yang ada. Komponen utama dari rangkaian ini adalah IC mikrokontroler ATMega 16. Pada semua IC inilah seluruh program diisikan , sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki. Dalam menjalankan IC mikrokontroler ATMega 16 memerlukan komponen elektronika pendukung lainnya, suatu rangkaian yang paling sederhana komponen pendukungnya disebut sebagai suatu rangkaian sistem mininum.
Dalam perancangan alat ini, sistem minimum mikrokontroler ATMega 16 terdiri dari: 1. Chip IC Mikrokontroler ATMega16
2. Kristal
3. Kapasitor
4. Resistor
sebagai sumber clocknya. Dimana nilai kristal ini akan mempengaruhi kecepatan mikrokontroler dalam mengeksekusi suatu perintah tertentu.
3.3 Rangkaian Display LCD
Display LCD merupakan suatu modul penampil yaitu 2 x 16 karakter. Display akan menampilkan pesan jarak dan harga yang telah dibaca yaitu dalam bentuk alphanumeric yaitu huruf dan angka. Terdapat 16 pin antarmuka pada LCD yaitu 8 pin data, 3 pin kontrol, 2 pin ground, dan 2 pin VCC. Display menerima masukan dari mikrokontroler secara paralel, dalam hal ini menggunakan interface data bit dengan alasan menghemat penggunaan port. 3 pin kontrol yaitu RS, RW, dan clock berfungsi masing-masing yaitu RS untuk pemilihan register, RW untuk , menentukan tulis atau baca, dan clock sebagai masukan pulsa sinkronisasi.
3.4 Rangkaian GPS
Module GPS ada sebuah perangkat elektronika yang menerima sinya satelit untuk menetukan titik lalitude dan longitudinalnya, Modul GPS V.Kel vk162 memiliki sensitifitas tinggi untuk pencarian sinyalSiRFstarIII™ dengan dua pilihan sumber tegangan yang dapat digunakan yaitu 5V dan 3V. Pada rangkaian, modul GPS V.KEL VK162 diberi tegangan 5V dan tegangan antenna sebesar 5V karena catu daya yang digunakan sebesar ±5V. terdapat 6 pin pada modul GPS V.KEL VK162 dimana terdapat BOOT, GND,VCC,TX,RX,PPS. Dimana pin TX akan dihubungkan dengan kaki 14 yang merupakan RXD pada chip mikrokontroler, dan kaki 15 yang merupakan TXD pada mikrokontroler akan di hubungkan dengan pin RX pada modul GPS. Sedangkan ground dan VCC pada modul GPS akan dihubungkan pada ground dan VCC masing-masing pada mikrokontroler.
Komunikasi yang digunakan pada pengiriman data dari GPS ialah komunikasi dimana komunikasi serial adalah komunikasi yang pengiriman datanya per-bit secara berurutan dan bergantian. Komunikasi ini mempunyai suatu kelebihan yaitu hanya membutuhkan satu jalur dan kabel yang sedikit dibandingkan dengan komunikasi paralel. Pada prinsipnya komunikasi serial merupakan komunikasi dimana pengiriman data dilakukan per bit sehingga lebih lambat dibandingkan komunikasi parallel, atau dengan kata lain komunikasi serial merupakan salah satu metode komunikasi data di mana hanya satu bit data yang dikirimkan melalui seuntai kabel pada suatu waktu tertentu.
Gambar 3.4 Rangkaian modul GPS
Gambar 3.5 Modul GPS beserta pin
Komunikasi serial yang digunakan pada mikrokontroler dan gps adalah komunikasi serial 2 arah. dimana komunikasi 2 arah bergantian semacam ini disebut dengan komunikasi half duplex. Komunikasi 2 arah bergantian dirasa kurang cepat lagi, sehingga dimungkinkan untuk melakukan komunikasi 2 arah bersamaan, yang kemudian disebut dengan komunikasi full duplex. Sekarang mikro kontroller pun sudah mampu melakukan komunikasi full duplex. Hal tersebut dapat dilakukan dengan membuat mesin pengirim data dan mesin penerima data secara terpisah. Mesin pengirim data biasanya disebut dengan TX (Transmiter) sedang mesin penerima data disebut debagai RX (Reciever). Walaupun mereka memiliki komponen elektronika terpisah, dan memiliki buffer data terpisah serta juga memiliki peralatan interupsi terpisah, mereka digerakkan oleh baud rate yang sama. Misalnya jika TX bekerja pada baud rate 9600 bps maka RX tentu saja bekerja pada baud rate yang sama. Dalam prakteknya TX dan RX digunakan sesuai dengan kebutuhan.
Gambar 3.6 Flowchart sistem kerja alat Baca data posisi GPS
Start
If Tombol Strart = 0
If Tombol Reset = 0
Parsing data serial dari GPS. Start time/waktu
Jarak = 0 Biaya = 0
Hitung jarak dan waktu tunggu
Tampilkan ke LCD
If Tombol stop= = 0 (ditekan)
Bayar = (Jarak x harga per kilometer ) + (waktu tunggu x harga per waktu tunggu )
= (Jarak _km x Rp 5.000 ) + (waktu per menit x 500)
Tampilkan biaya ke LCD
Stop
Keterangan :
3.6Rangkaian Lengkap
BAB IV
PENGUJIAN DAN ANALISIS SISTEM
4.1 Pengujian Rangkaian Mikrokontroler ATMega 16 dengan LCD
Untuk mengetahui apakah minimum sistem Atmega 16 ini dapat bekerja dengan baik maka harus menjalankan program AVR dengan menggunakan bahasa visual C++ pada minimum sistem tersebut. Yang harus dilakukan sebelum proses running program adalah mendownload program pada mikrokontroler.
Peralatan :
1. Minimum sistem mikrokontroler Atmega16 2. Rangkaian LCD pada PORTC
3. DC Power Supply
4. Seperangkat USB Downloader Atmega16
5. Software CodevisionAVR dan Khazama AVR Programmer Rangkaian:
Gambar 4.1 Diagram blok rangkaian pengujian Mikrokontroler Atmega16 Persiapan:
1. Memasang rangkaian seperti yang ditunjukkan pada Gambar 4.1 2. Mengetik program pengujian menggunakan Software CodevisionAVR 3. Mendownload program dan Menjalankan program
Langkah-langkah yang dilakukan:
1. Klik Start All Program CodeVisionAVR CodeVisionAVR.exe
Laptop USB Display LCD Downloader
2. Pada software CodeVisionAVR, Klik File New Project OK 3. Muncul kotak dialog seperti gambar dibawah ini:
Gambar 4.2 Kotak Dialog setting chip dan clock
Kemudian setting sesuai dengan alat yang penulis pakai, yaitu chip ATmega16 dan menggunakan clock 11.059200 MHz.
4. Setting PORTC sebagai output LCD seperti pada gambar di bawah ini:
5. Kemudian Klik File Generate, Save and Exit. Simpan file di folder yang dikehendaki.
6. Muncul file hasil Generate tadi seperti tampak pada Gambar 4.4. Seperti yang ditunjukkan pada lingkaran garis merah, adalah hasil setting ouput untuk PORTC yang terhubung ke rangkaian LCD.
Gambar 4.4 Listing program hasil generate
7. Setelah selesai, kemudian tekan Shift+F9 untuk mengkompile dan menghasilkan file .Hex
8. Download menggunakan USB Downloader file test rangkaian.Hex yang telah dibuat menggunakan software Khazama AVR Programmer seperti gambar 4.5 di bawah ini.
Gambar 4.6 Listing Program untuk menyalakan LCD
Program untuk menampilkan text pada LCD seperti yang terlihat pada gambar 4.5. Pada program lcd_gotoxy(0,0) menunjukkan bahwa karakter pertama dari “ TEST LCD !” terletak pada sumbu x=0 dan y=0, maksudnya pada kolom pertama baris pertama. Kemudian lcd_gotoxy(0,0) menunjukkan bahwa x=0 dan y=1 yaitu “TIMBUL Y SIAHAAN” Dimulai dari kolom pertama pada baris kedua.
Gambar 4.7 Tampilan LCD
4.2 Pengujian Rangkaian Module GPS
Modul GPS V.KEL VK162 digunakan sebagai media pengirim informasi berupa posisi. GPS akan terus memperbarui setiap data keluarannya sesuai dengan sinyal yang dikirim satellite. Untuk memisahkan blok-blok data, maka harus dilakukan penyeleksian header GPS. GPGGA adalah salah satu header GPS yang digunakan untuk memberikan informasi waktu, garis lintang, garis bujur dan ketinggian. Analisa yang dilakukan untuk mengetahui format header NMEA-0183 pada modul GPS V.KEL VK162, yaitu dengan melihat keluaran pada program SRIF demo. Gambar format data GPGGA pada modul GPS V.KEL VK 162 setelah GPS dihubungkan dengan laptop adalah sebagai berikut.
Gambar 4.8 Tampilan SIRF demo
Gambar 4.9 Tampilan Debug View
Dimana pada tampilan debug view dapat dilihat data yang diperoleh yaitu:
$GPGSV,3,1,12,13,67,271,23,11,65,123,18,03,30,020,17,17,26,344,15*74
$GPGSV,3,2,12,23,60,195,,06,43,119,,01,43,154,,19,40,023,22*72
$GPGSV,3,3,12,28,26,316,,20,20,183,,17,12,222,,27,10,030,*7A
$GPRMC,045136.000,A,0338.2520,N,09839.9480,E,0.00,114.53,140712,,,A*6D
$GPVTG,114.53,T,,M,0.00,N,0.0,K,A*0F
$GPGGA,045137.000,0338.2518,N09839.9485,E,1,03,2.3,233.6,M,-15.9,M,,0000*40
$GPRMC, 045137.000,0338,A,0338.2518,N,09839.9485,E,0.00,114.53140714,,,A*62
$GPVTG,114.53,T,,M,0.00,N,0.0,K,N*00
$GPGGA,045138.000,0338.2518,N09839.9485,E,1,03,2.3,233.6,M,-15.9,M,,0000*64
$GPRMC, 045138.000,0338,A,0338.2518,N,09839.9485,E,0.00,114.53140714,,,A*69
$GPGGA,045139.000,0338.2518,N09839.9485,E,1,03,2.3,233.6,M,-15.9,M,,0000*4E
$GPRMC, 045139.000,0338,A,0338.2518,N,09839.9485,E,0.00,114.53140714,,,A*6C
$GPVTG,114.53,T,,M,0.00,N,0.0,K,N*00
Dimana :
Tabel 4.1 Kalimat NMEA pada data GPS
Option Description
$GPGSV The number of GPS satellites in view satellite ID numbers, elevation, azimuth, and SNR values
$GPRMC Time, date, position, course and speed data
$GPVTG Course and speed information relative to the ground
Contoh penjelasan data
$GPGGA,045139.000,0338.2518,N09839.9485,E,1,03,2.3,233.6,M,-15.9,M,,0000*4E
Istilah Sintak Satuan Penjelasan
Sintak $GPGGA GGA protokol Waktu UTC 045139.000 hhmmss.sss
Garis Lintang 0338.2518 ddmm.mmmm
Indikator N/S N N=north(utara) atau S=south(selatan)
Garis Bujur 09839.9485 dddmm.mmmm
Indikator W/E E E= east(timur) atau W=west(barat)
Indikator Posisi 1
Satelit yang
Digunakan 03
HDOP 2.3
Ketinggian Terhadap Horizontal Dilution of Precision Air Laut 6 meter (error secara horizontal)
Satuan M meter Geoid Separation meter Satuan M meter
Age of Diff. Corr. kosong bila DGPS tidak digunakan
Diff. Ref. Station ID 0000
Checksum *4E Pegnecekan error
4.3 Pengujian Program
lonGPS=nilai[23]*100 + nilai[24]*10 + nilai[25]*1 + ((float)nilai[26]*100000 + (float)nilai[27]*10000 +
(float)nilai[29]*1000 + (float)nilai[30]*100 + (float)nilai[31]*10 + (float)nilai[32]*1)/1000000;
lon1=lonGPS; /*
lcd_gotoxy(0,1);
sprintf(buffer,"Lt:%c%c%c%c%c%c%c%c%c",data[11],data[12],data[13],data[14],data[15],da ta[16],data[17],data[18],data[19]);
if(PINA.2==0)
sprintf(buffer,"-%02d:%d%d:%d%d- %02d:%02d",jam,nilai[2],nilai[3],nilai[4],nilai[5],menit,detik); lcd_puts(buffer);
Program tersebut adalah untuk menampilkan waktu, jarak dan harga pada tampilan display.
4.4 Data Pengujian Argometer Digital
Tabel 4.2 Data pengujian pada Argometer Digital
Jarak/ m Harga
0 0
64 320
137 685
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari uraian yang telah dibahas pada penelitian ini, maka dapat diambil beberapa kesimpulan sebagai berikut:
1. Dalam penelitian ini telah berhasil menggunakan menggunakan mikrokontroler ATMega 16 sebagai pusat kendali, dimana mikrokontroler akan memparsing data yang diperoleh dari GPS dengan terlebih dahulu menyamakan baud ratenya. 2. Pada penghitungan jarak antara titik koordinat pertama dan titik koornidat yang
kedua diguanakan metode eucledian diman metode tersebut merupakan metode metode pencari kedekatan nilai jarak dua buah variabel.
5.2 Saran
Adapun saran dari penulis adalah sebagai berikut:
1. Pada pengembangan selanjutnya dapat menggunakan PC untuk memonitoring posisi dari pemakai argometer.
DAFTAR PUSTAKA
Bejo,A,C dan AVR Rahasia Kemudahan Bahasa C Dalam Mikrokontroler ATMega 8535,Edisi I, Penerbit : Graha Ilmu.
Heri Andrianto, 2007, Pemrograman Mikrokontroler AVR Atmega16: Menggunakan Bahasa C (CodeVision AVR),Informatika, Jakarta.
Hasanuddin, 2006, Penentuan posisi dengan GPS & Aplikasisnya, Penerbit Pradnya Paramita, Indonesia.
Setiawan Afrie,2011, 20 Aplikasi Mikrokontroler ATMega 8535 & ATMega 16 Menggunakan Bascom-AVR,Penerbit Andi, Yogyakarta.
Program Keseluruhan
/***************************************************** Chip type : ATmega16
Program type : Application
AVR Core Clock frequency: 11.059200 MHz Memory model : Small
unsigned long int i,nilai[100],bayar,data_jarak; float latGPS,lonGPS,lat1,lat2,lon1,lon2,jarak,buff,; bit flag;
unsigned int jam;
// Alphanumeric LCD functions #include <alcd.h>
// Declare your global variables here
// Declare your local variables here
// Input/Output Ports initialization // Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=P State6=P State5=P State4=P State3=P State2=P State1=P State0=P PORTA=0xFF;
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTB=0x00;
DDRB=0x00;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTC=0x00;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTD=0x00;
DDRD=0x00;
// USART initialization
// Communication Parameters: 8 Data, 1 Stop, No Parity // USART Receiver: On
// USART Transmitter: Off // USART Mode: Asynchronous // USART Baud Rate: 9600 UCSRA=0x00;
UCSRC=0x86; UBRRH=0x00; UBRRL=0x47;
//if(data[45]==',') {alt=nilai[42]*1 + (float)nilai[44]/10;}
//sprintf(buffer,"Jam %02d:%d%d:%d%d",jam,nilai[2],nilai[3],nilai[4],nilai[5]); //lcd_puts(buffer);
jarak=jarak+buff;
if(jarak>10000000) jarak=jarak-jarak; bayar=(int)jarak*5000; //SETTING HARGA data_jarak=(int)jarak;
lcd_gotoxy(0,1);
sprintf(buffer,"%05d m",data_jarak); lcd_puts(buffer);
lcd_gotoxy(8,1);
sprintf(buffer,"Rp.%5d",bayar); lcd_puts(buffer);
lcd_gotoxy(0,0);
sprintf(buffer,"Time: -%02d:%d%d:%d%d-",jam,nilai[2],nilai[3],nilai[4],nilai[5]); lcd_puts(buffer);