V
DAFTAR RIWAYAT
HIDUP
Hidup adalah anugrah dari Allah yang sudah sepatutnya
disyukuri,disadari,lalu diperbaiki. Hidup harus
1
Nama lengkap : Ardi Kurniawan
Jenis kelamin : Laki-laki
Tempat, tanggal lahir : Bandung, 08 Juli 1990
Agama : Islam
Status pernikahan : Belum Menikah
Alamat di Bandung : Jl. Cijambe No 31 RT 04 RW 06 Kec. Ujungberung, Kel. Pasir
endah Bandung
Handphone : +62 85 721 509 828
E – mail : [email protected]
A. Formal
1. SD Negeri Cijambe 1 : 1996 - 2002
2. SMP Triyasa : 2002 - 2005
3. SMA Karya Pembangunan : 2005 - 2008
4. Univeritas Komputer Indonesia / Teknik Komputer : 2008- 2013
Skripsi : Perancangan sistem kendali pada robot Tanam Benih langsung (TABELA)
1. Eksibisi Robot Pertanian International conference on biodiversity, climate change and
food security side event Olimpiade Adaptasi Pertanian Menghadapi Perubahan Iklim
2. Asisten Lab. Elektronika di Jurusan Teknik Komputer-FTIK-UNIKOM Tahun
2011-2012
3. Tim Riset Lab. Elektronika di Jurusan Teknik Komputer-FTIK-UNIKOM Tahun
2011-2012
4. Tim Wirausaha Lotech-Bandung di Jurusan Teknik Komputer-FTIK-UNIKOM Tahun
2011-2012
DATA PRIBADI
PENDIDIKAN
KARYA ILMIAH
2
Kegiatan Waktu Tempat Keterangan
INAICTA
Karya “Pengembangan alat bantu komunikasi
antar tunanetra-tunarungu menggunakan kode
braille dan pengenalan pola suara per-kata”
2012 Jakarta Nominator
INAICTA
Karya “ Robot tanam Benih Langsung
(TABELA)
2013 Jakarta Nominator
Pelatihan Program Mahsiswa wirausaha (PMW) 2012
Bandung
Kopertis
wilayah IV
Peserta
Seminar training dan study islam for muslim
generation 2010 UNIKOM Peserta
Seminar dan workshop “siap dan sukses tugas
akhir” 2010 UNIKOM Peserta
Pelatihan Enterpreneurship ICT “pemanfaatan
social media untuk pemasaran yang efisien dan
efektif bagi para start-U bisnis
2012 Bandung peserta
Panitia workshop “interfacing level pemula 2012 UNIKOM Panitia
Seminar “robot technology dan
technopreneurship” 2011
Sumdang
SMK N 1
Sumedang
Pemateri
A. Pengantar Sistem Komputer
B. Pengantar Organisasi Komputer
C. Elektronika Dasar
D. Elektronika Lanjut
E. Pemrograman Visual/Data Base
F. Teknik Interfacing
SEMINAR / PELATIHAN / WORKSHOP/ KOMPETISI
3
Sistem Komputer Elektronika
Pemrograman Visual dan Data Base Mikrokontroler
Interfacing
Robotika (Sensor,Mobile robot ,legged robot and flying robot)
Komputer (Assembling ,Troubleshooting and Networking) Elektronika (Designing, Simulating,Assembling and Testing) Pemrograman (Alghorithm,Coding,Debugging)
Memilik semangat & etos kerja yang tinggi, baik mandiri ataupun tim dan dapat beradaptasi
dengan lingkungan kerja dengan baik
Memiliki semangat mengajar dan riset yang tinggi, khususnya untuk kompetisi Memiliki Kemampuan memimpin / leadership tim dengan baik
Operating sistem yang pernah dipakai / dikuasai : Windows 95/98SE/2000/XP/Longhorn/Vista/7
Mikroprosesor/Mikrokontroler yang pernah dipakai/dikuasai :
o AVR 8535
o PIC
o Basic Stamp
Bahasa pemrograman yang dikuasai :
o HTML
o Pascal
o Basic and variant (Basic, Visual Basic, Pbasic/Basic Stamp)
o PHP
o SQL
KEMAMPUAN DASAR TEKNIS BIDANG MINAT
4
Familiar/menguasai software :
o Microsoft Office 2000/2003/2007 /2010
o Dreamwaver MX, FLASH MX
o Photo shop 7/CS2
o Protel 99, DXP
o Eagle
Indonesia : Baik Inggris : Sedang
Saya suka belajar, terutama untuk hal atau bidang ilmu baru. Sudah terbiasa dengan pola belajar dan
bekerja baik mandiri ataupun kelompok. Memiliki kesehatan yang baik, emosi yang stabil dan siap
bekerja , baik mandiri ataupun bersama tim sesuai arahan dan target yang sudah ditentukan. Tidak
cepat puas dengan pencapaian yang sudah diraih, khususnya dalam riset. KEMAMPUAN BAHASA
PERANCANGAN SISTEM KENDALI PADA ROBOT TANAM
BENIH LANGSUNG (TABELA)
TUGAS AKHIR
Disusun untuk memenuhi syarat kelulusan pada
Program Studi Sistem Komputer Strata Satu di Jurusan Teknik Komputer
Oleh
Ardi Kurniawan
10208011
Pembimbing
Agus Mulyana, M.T
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
BANDUNG
iii
KATA PENGANTAR
Segala puji bagi Tuhan Yang Maha Esa, Pencipta dan Pemelihara alam
semesta, sholawat dan salam semoga tetap tercurah kepada nabi Muhammad
SAW, keluarga, sahabat, serta para pengikutnya yang setia hingga akhir zaman.
Atas rahmat Allah SWT, akhirnya Penulis dapat menyelesaikan Tugas
Akhir ini, meskipun proses belajar sesungguhnya tak akan pernah berhenti. Tugas
Akhir ini sesungguhnya bukanlah sebuah kerja individual dan akan sulit
terlaksana tanpa bantuan banyak pihak yang tak mungkin Penulis sebutkan satu
persatu, namun dengan segala kerendahan hati, Penulis mengucapkan terima kasih
kepada
1. Dr.Wendi Zarman, M.Si selaku Ketua Jurusan Teknik Komputer.
2. Bapak Ir.syahrul, M.T, selaku Dosen Wali kelas 08 TK-1.
3. Bapak Agus Mulyana, M.T., selaku Pembimbing I dan Koordinator
Lab.Elektronika yang telah banyak memberikan arahan, saran, nasihat,
motivasi dan bimbingan kepada Penulis selama menempuh studi.
4. Bapak dan Ibu seluruh staff dosen Jurusan Teknik Komputer dan yang
pernah mengajar penulis serta seluruh Staff Administrasi Universitas
Komputer Indonesia, yang telah banyak memberikan ilmu, motivasi dan
bantuan kepada penulis.
5. Kedua orang tua, kakak, adik dan keluarga besar tercinta yang senantiasa
tidak henti-hentinya mencurahkan cinta, kasih sayang, perhatian, nasihat,
serta motivasi kepada penulis selama studi.
6. Teman–teman keluarga besar Laboratorium Elektronika dan Elka research
grup (ERG), Heri, Ega, Panjul, Sandi, Fajri, Dwi, Arizal terima kasih atas
dukungannya.dan bantuan atau motivasinya.
7. Teman–teman angkatan 2008, Hayi Akbar, Lutfan, Reggy, Sopyan, Tulus,
Budi, yang telah banyak membantu selama studi maupun selama proses
iv
8. Hadi Kusumah, Fauzan M Iqbal, Awal Arif, Oki, Syam, dan Nuryanti
penghuni Lab Elektronik yang sama-sama berjuang untuk lulus sebagai
serjana dan diploma.
Akhirnya, Penulis berharap semoga penelitian ini menjadi sumbangsih yang bermanfaat bagi dunia sains dan teknologi di Indonesia, khususnya disiplin keilmuan yang Penulis dalami
Bandung, Agustus 2013
vi
DAFTAR ISI
LEMBAR PENGESAHAN ... i
LEMBAR PERNYATAAN ... ii
ABSTRAK ... iii
KATA PENGANTAR ... iv
DAFTAR ISI ... vi
DAFTAR GAMBAR ... ix
DAFTAR TABEL ... xi
BAB IPENDAHULUAN ... 1
1.1 Latar Belakang... 1
1.2 Tujuan Penelitian ... 1
1.3 Rumusan Masalah ... 1
1.4 Batasan Masalah ... 2
1.5 Metode Penelitian ... 2
1.6 Sistematika Penelitian ... 3
BAB IITEORI PENUNJANG ... 4
2.1 Tanam Benih Langsung ... 4
2.1.2 Pelaksanaan TABELA ... 4
2.2 Pengenalan Perangkat keras (hardware) ... 5
2.2.1 Mikrokontroler (Basic Stamp 2p40)... 5
2.2.2 Sensor ... 6
2.2.2.1 Sensor Kompas HMC5883L ... 7
2.2.2.2 Infrared Sharp GP2D12 ... 8
2.2.2.3 Optocoupler ... 8
vii
2.2.4 ADC (Analog Digital Converter) ... 11
2.2.5 Driver Motor ... 12
2.2.6 Buzzer dan LED ... 12
2.3 Pengenalan Perangkat Lunak (Software) ... 13
2.3.1 Pengenalan Basic StampEditor ... 13
2.3.2 Memprogram Basic Stamp ... 14
2.3.1.1 Directive ... 15
2.3.1.2 Menentukan Variabel ... 15
2.3.1.3 Bagian Program Utama ... 16
2.3.1.4 Bagian Prosedur ... 17
2.3.1.5 Memeriksa Sintaks Program ... 18
2.3.2 Menjalankan Program ... 18
BAB IIIPERANCANGAN SISTEM ... 19
3.1 Perncangan Perangkat Keras (Hardware) ... 19
3.2 Realisasi Rangkaian ... 20
3.2.2 Rangkain Driver Motor ... 21
3.2.3 Sensor Kompas... 22
3.2.4 Sensor Kecepatan ... 22
3.3 Perancangan Perangkat Lunak (Software) ... 23
3.3.1 Perancangan Algoritma Keseluruhan ... 23
3.3.2 Perancangan Prosedur ... 31
BAB IVPENGUJIAN DAN ANALISA SISTEM ... 39
4.1 Pengujiaan Fungsional dan Kehandalan Sisitem ... 39
4.1.1 Regulator ... 39
viii
4.1.3 Driver Motor ... 40
4.1.4 Motor DC Power Windows ... 40
4.1.5 Sensor Infrared ... 40
4.1.6 Sensor kompas HMC 5883L ... 40
4.2 Pengujian Integrasi ... 40
4.2.1 Pengujian jarak tanam 20cm, 25cm dan 30cm ... 40
4.2.2 Pengujian jarak tanam 20 cm, 25 cm dan 30 cm tanpa tanam benih ... ... 40
4.2.3 Pengujian robot lahan tanah kering ... 40
4.3 Analisis pengujian jarak tanam roda tidak menyentuh tanah dengan di tanah kering ... 40
BAB VSIMPULAN DAN SARAN ... 40
5.1 Simpulan ... 40
5.2 Saran ... 40
50
DAFTAR PUSTAKA
[1] Datasheet EMS 30 A H-Bridge juni 2013
[2] Compass Module 3-Axis HMC5883L (#29133) Parralax, Inc 2011
[3] SHARP. (t.thn.). Sensor Infrared GP2D12. Didownload April12,2012, dari
htp://www.datasheetarchive.com/pdf/download.php
[4] Gordon MC combs, (2001).The robot builder’s bonanza. New York
[5] http://hades.mech.northwestern.edu/index.php/Rotary_Encoder
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Tanam benih langsung pada padi, jagung dan kedelai di Indonesia untuk
saat ini belum terlalu modern, masih banyak yang menggunakan alat konvesional
untuk menanamnya. Adapun untuk penanaman padi, petani menggunakan sistem
TABELA (tanam benih langsung).
Sistem TABELA telah dikenal para petani dengan menggunakan sebuah
pipa dan ditarik sehingga benih akan terjatuh ke lahan dengan kondisi benih yang
tidak merata pada setiap lubang. Sehingga benih yang tumbuh tidak merata karena
benih yang tertabur tidak sama. Terlebih lagi jarak antar benih tidak bisa diatur
karena setiap jenis benih menentukan jarak terhadap penanaman dan idelanya
benih untuk setiap lubang sama atau 3-5 butir/lubang, jarak tanamnya 20x20 cm,
25x25 cm dan 30x30 cm. Ketepatan dalam penanaman, jarak antar benih bisa
diubah-ubah sesuai kebutuhan, dalam penanaman bisa bergerak secara lurus dan
penanaman secara otomatis merupakan hal yang ingin dicapai.
Untuk mencapai hal tersebut, dibuat sebuah robot TABELA dengan tujuan
agar bisa menanam benih secara otomatis dengan jarak antar benih bisa diatur
sesuai kebutuhan. Dengan menggunakan sensor infrared sehingga robot bisa
mengetahui dinding atau lahan dan untuk jarak tanam mengunakan encoder
digabung dengan optocoupler sehingga menghasilkan sensor jarak. sedangkan
sensor kompas agar robot bisa berjalan sesuai koordinat yang diinginkan.
1.2 Tujuan Penelitian
Tujuan yang hendak dicapai dalam pelaksanaan Tugas Akhir ini adalah
mampu merancang sistem kendali otomatis pada robot (TABELA).
1.3 Rumusan Masalah
Berdasarkan latar belakang yang telah dijelaskan di atas, maka dapat
2
1. Bagaimana robot bisa berjalan lurus secara otomatis?
2. Bagaimana robot bisa berbelok dengan tomatis jika sudah sampai ke ujung
dari lahan?
3. Dapat menentukan jarak tanam secara otomatis dari 3 jarak yang
disaranakan yaitu 20x20 cm, 25x25 cm dan 30x30 cm?
1.4 Batasan Masalah
Adapun batasan masalah dalam pembuatan Tugas Akhir adalah sebagai
berikut.
1. Robot TABELA bisa berjalan dilahan yang datar, tanah yang gembur
dengan menggunakan roda yang sesuai dengan kondisi lahan.
2. Jarak tanam terdapat 3 buah yaitu ukuran 20x20 cm, 25x25 cm, dan 30x30
cm.
3. Indikator menggunakan Buzzer untuk saklar dan LED untuk sensor kompas.
1.5 Metode Penelitian
Dalam Proposal Tugas Akhir ini penulis menggunakan beberapa metode
penelitian, yaitu :
a. Studi Pustaka
Merupakan metoda pengumpulan data yang dilakukan dengan cara mencari
referensi, membaca, mempelajari buku-buku yang berhubungan dengan
masalah yang menjadi topik tugas akhir, sehingga dapat digunakan sebagai
acuan dalam proses pembuatan sistem.
b. Interview
Bertanya kepada pihak-pihak yang dapat memberikan informasi yang
dibutuhkan dengan cara melakukan bimbingan dengan dosen pembimbing
dan berdiskusi dengan sesama rekan mahasiswa.
c. Eksperimental
Eksperimental yaitu melakukan perancangan dan pembuatan rangkaian
secara langsung.
3
Pengujian dan analisis merupakan metode untuk mengetahui hasil dari
perancangan sistem yang telah dibuat, apakah sudah berhasil sesuai dengan
yang direncanakan atau belum, selanjutnya akan dilakukan pengujian baik
secara teoritis maupun praktis, dan jika terdapat kekurangan maka akan
dilakukan beberapa perbaikan sehingga pada akhirnya dapat diperoleh suatu
kesimpulan dari hasil penelitian.
1.6 Sistematika Penelitian
Sistematika penulisan tugas akhir ini sebagai berikut:
BAB I: Pendahuluan
Bab ini meliputi latar belakang, manfaat dan tujuan alat yang akan
dibuat, batasan masalah, metodologi pelaksanaan, dan sistematika
penulisan tugas akhir yang akan di buat.
BAB II: Dasar Teori
Bab ini akan menguraikan dasar teori yang mendukung dalam
penulisan Tugas Akhir..
BAB III: Perancangan Sistem
Bab ini akan memaparkan tentang perancangan alat berupa
perangkat keras (Hardware) dan perangkat lunak (Software).
BAB IV: Pengujian dan Analisis Sistem
Bab ini berisikan hasil pngeujian yang diperoleh dari perancangan
yang telah direalisasikan, analisis data dan rangakaian.
BAB V: Simpulan dan Saran
Bab ini akan menyampaikan simpulan dengan merujuk pada hasil
penelitian yang sudah dilakukan, juga merujuk pada tujuan
penelitian, apakah tujuan penelitian sudah tercapai atau belum,
serta memberikan saran untuk mengembangkan penelitian yang
telah dilakukan berdasarkan kelemahan dan keterbatasan dalam
49
BAB V
SIMPULAN DAN SARAN
5.1 Simpulan
Simpulan yang dapat diambil berdasarkan hasil pengujian yang telah
dilakukan, di antaranya:
1. Robot TABELA yang dirancang untuk sistem kendali otomatis sudah
berjalan dengan baik hal ini didasari dari hasil pengujian pada masing-masing sensor.
2. Dengan sensor optocoupler dan encoder robot bisa berhenti di jarak 20x20 cm, 25x25 cm dan 30x30 cm dan sesnor kompas untuk robot agar tetap pada set point yaitu 90°.
3. Robot bisa berbelok ketika roda tidak menyentuh tanah akan tetapi ketika di tanah robot tidak berbelok karena mekanik robot yang tidak sesaui.
4. Dari hasil pengujian rata-rata robot memerlukan waktu tempuh 4,49 detik untuk 1 kali tanam.
5.2 Saran
Adapun saran dari hasil pengujian yang telah dilakukan antara lain.
1. Menambah sensor yang bisa membaca kemiringan lahan sehingga robot bisa
menanam pada kondisi lahan miring seperti di perbukitan.
2. Membuat robot bisa dikendalikan dengan remot Kontrol, sehingga bisa
secara otomatis atau dijalankan dengan remot kontrol.
3. Berdasarkan Pada tabel 4.4 bisa merubah sensor jarak dengan yang lebih
baik agar hasil yang dihasilkan lebih baik juga.
4. Membuat olgoritma penanaman yang sederhana sehingga robot bisa berkeja
1
PERANCANGAN SISTEM KENDALI PADA ROBOT TANAM BENIH LANGSUNG (TABELA)
Agus Mulyana1, Ardi kurniawan2 12
Jurusan Teknik Komputer Unikom, Bandung 1
[email protected], [email protected]
ABSTRAK
Sitem TABELA (tanam benih langsung) adalah sistem tanam yang tidak memerlukan pesemaian benih terlebih dahulu, akan tetapi alat TABELA sampai sekarang masin manual sehingga benih dan jarak tanam tidak merata. Hal ini mendorong untuk membuat robot TABELA agar jarak tanam dan benih bisa diatur sesuai kebutuhan.dengan menggunakan beberapa sensor-sensor seperti sensor infrared (SHARP GP12), sensor kompas HMC588L, optocoupler, dan mikrokokntroler basic stamp 2P40 sebagai pengolah data. Hasil pengujian terhadap sensor kompas, infrared (SHARP GP 12), optocoupler, akan memberi masukan ke motor DC agar berjalan lurus, berhenti, berbelok dengan otomatis. Pengujian terhadap masing-masing sensor menunujukan bahwa sensor bekerja dengan baik dan maksimal waktu tempuh untuk setiap kali tanam memerlukan waktu 4,49 detik dengan jarak tanam 20 cm.
Kata kunci : TABELA, robot, otomatis, basic stamp 2p40
1. PENDAHULAUN
Tanam benih langsung padi, jagung dan kedelai di Indonesia belum terlalu modern, masih banyak yang menggunakan alat konvesinoal untuk menanamnya. Adapun untuk penanaman padi petani menggunakan sistem TABELA (tanam benih langsung). Sistem ini sebenarnya sudah dikenal oleh masyarakat khususnya petani, dengan menggunakan sebuah pipa dan didorong oleh manusia, jarak antar tanam tidak bisa diatur dan sitem tanam yang masih mengunakan tenga kerja sehingga hasil tanam tidak merata.
Ketepatan tanam setiap lubang dan jarak tanam antara 30x30 cm, 25x25cm dan 20x20 cm, harus bisa diatur sesuai kebutuhan sehingga hasil tanam akan maksimal.
Dalam penelitian dirancang robot TABELA dengan tujuan agar bisa menanam benih secara otomatis dengan jarak antar benih bisa diatur sesuai kebutuhan.
1. PERANCANGAN
Perancangan yang dilakukan terdiri dari perancangan mekanik, perancangan perangkat keras dan perancangan perangkat lunak.
Perancangan Mekanik
Pada perancangan mekanik robot mempunyai spesifikasi seperti berikut.
Sistem yang dirancang bisa dilihat pada gambar dibawah ini.
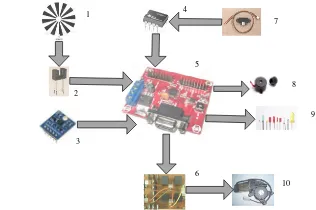
Gambar 2 Diagram Blok Rangkaian
Mikrokontroler basic stamp BS2P40 sebagai pengolah data dari sensor infrared, optocoupler
Agus mulayan, Ardi kurniawan
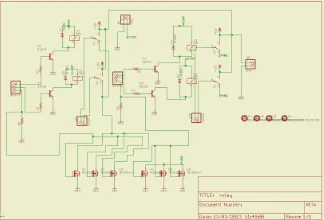
2 Sensor Kompas memuat HMC 5883L untuk menentukan arah dengan menetapkan arah 90° sebagai set point dari robot, sehingga jika melenceng dari set point robot secara otomatis kembali ke set point dengan bantuan motor DC kiri dan kanan. Berikut sekmatik rangkain yang di tunujukan pada Gambar 3.
Gambar 3. Skema Rangkaian Sensor Kompas
Sensor infrared memuat SHARP GP 12 agar robot tidak berbenturan dengan pengahalang atau tembok dimana pantulan dari transmitter
akan di terima oleh reciver dan akan dioleh di mikrokontroler.
Gambar 4. Infrared SHARP GP12
Output dari sensor di atas masih berupa analog, sehingga harus masuk ke ADC agar menjadi digital yang terdapat dari pin mikrokontroler. Oprocoupler dan encoder untuk menentukan RPM (revolutions per minute) dengan begitu bisa menentukan jarak yang diinginkan.
Dengan menggunakan rumus keliling lingkaran yaitu keliling lingkaran = 2 sama dengan panjang dari sebuah lingkaran.
Driver motor memuat rangkain relay dan transistor mosfet dengan pin masukan (IN+, IN-, dan MPWM) dengan keluaran MOUT1 dan MOUT2 berikut rangkain driver motor di tunjukan pada gambar 5
Gambar 5 Rangkaian Driver Motor
Rangkain di atas dilengkapi dengan MPWM
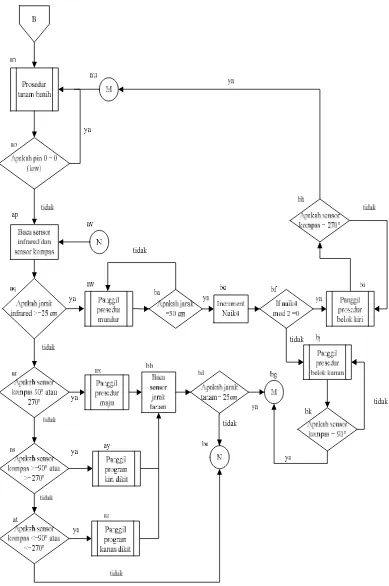
Perancangan perangkat lunak pada sistem penanam benih langsung (TABELA) bisa dilihat dibawah ini.
Gambar 6. Diagram Alir Pemilahan Saklar
Pada digram alir di atas terdapat tiga saklar untuk memilih jarak tanam yang diinginakan, unutk saklar 1 jarak tanam 30x30 cm, saklar 2 untuk jarak tanam 25x25cm dan sedangkan saklar yang ke 3 jarak tanam 20x20cm, jika saklar tidak ditekan makan indikator buzzer
perancangan sistem kendali pada robot tanam benih langsung (tabela)
3
Agus mulayan, Ardi kurniawan
4
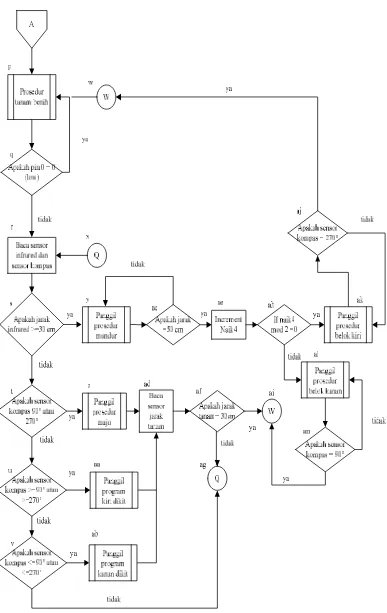
Gambar 8. Diagram Alir Untuk Jarak Tanam 25x25cm
perancangan sistem kendali pada robot tanam benih langsung (tabela)
5
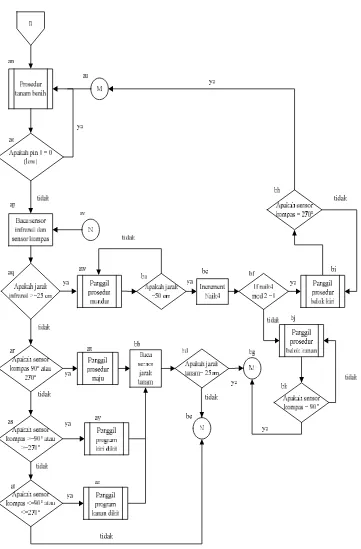
Gambar 9. Diagram Alir Untuk Jarak tanam 20x20cm
2. PENGUJIAN
Pengujian ini dilakukan untuk mengukur kehandalan dari sistem atau sistem yang dibuat mulai dari hardware dan software. Sehingga
hasil yang diharapkan bisa tercapai dengan baik.
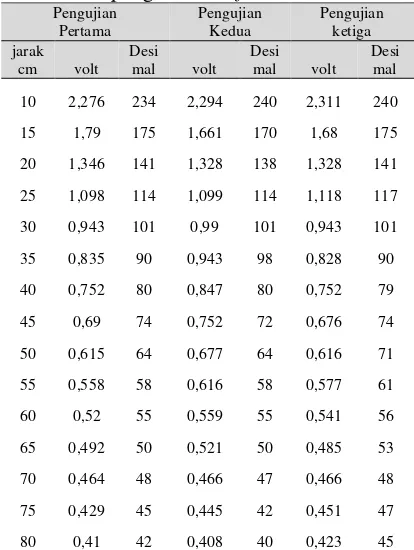
Pengujian sensor infrared
Agus mulayan, Ardi kurniawan
6 jarak masimal 80 cm. berikut data hasil pengukuran keluaran terhadap benda atau penghalang. Dari pengujian ini akan diambil jarak 20 cm, 25 cm dan 30 cm untuk menentukan akhir dari jarak tanam yang dipilih. Berdasarkan hasil pengukuran pada tabel 1 maka nilai tegangan keluaran dan desimal. Sensor infrared GP2D12 menurun jika jarak benda atau penghalang yang mendeteksi semakin jauh. Berikut adalah data hasil pengukuran keluaran sensor terhadap jarak benda:
Tabel 1 pengukuran infrared GP2D12 Pengujian
Dalam pengujian driver motor dihubungkan ke motor power windows agar bisa terlihat keluaran dari driver motor tersebut. Berikut hasil pengujian driver motor.
Tabel 2 pengujian Driver Motor MPWM MIN+ MIN- Kondisi masukan apapun. MPWM merupakan pin untuk
mengatur kecepatan motor atau PWM (pulse witdh modulation) dimana MPWM diberi sintak langsung dari mikrokontroler.
Pengujian sensor optocoupler dan encoder Pengujian sensor optocoupler dan encoder
dilakukan dengan memutarkan roda dengan diamater roda = 16cm.
Dengan menggunakan rumus keliling lingkaran yaitu 2πr. Jika berputar satu kali maka jarak yang akan ditemput yaitu 50,2cm. berikut hasil dari pengujian optocoupler dan encoder.
Tabel 3 pengujian oprocpuler Sudut
Untuk mencari jarak dengan menggukan rumus panjang sebuah busur lingkaran yaitu.
panjang busur=<AoB
perancangan sistem kendali pada robot tanam benih langsung (tabela)
7 Sensor kompas HMC 5883L memiliki tiga buat masukan tiga yaitu x, y dan z atau bisa disebut 3 axis ketika nilai x= 461, y=-6, dan z=-30 menunjukan sudut 0°, selengkapanya terlihat pada tabel 4.
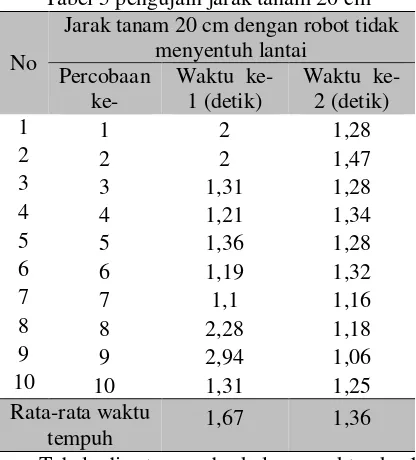
Pengujian jarak tanam 20cm
Tabel 5 pengujain jarak tanam 20 cm
No
Jarak tanam 20 cm dengan robot tidak menyentuh lantai sampai ke jarak tanam 20cm waktu tempuhnya tidak stabil dan maksimal waktu yang di tempuh yaitu 2,94 detik, sedangkan untuk kolom waktu ke-2, waktu yang ditempuh maksimal memerlukan waktu 1,47 detik.
Pengujina dilahan tanah dengan jarak 20 cm Tabel 6 pengujain di lahan tanah dengan jarak
tanam 20 cm
No jarak tanam 20 cm jarak tanam ke- waktu (detik)
1 1 3,02
Rata-rata waktu tempuh 4,49
Tabel di atas diujikan sebayak 10 kali tanam dan waktu yang ditempuh yang sering terjadi yaitu 4 detik.
Analisis pengujian jarak tanam roda tidak menyentuh tanah dengan di tanah kering Dari tabel 5 rata waktu tempuh yaitu 1,36-1,67 detik sedangkan hasil tabel 6 rata-rata waktu tempuh yaitu 4,49 detik ketika robot dijalankan di tanah kering ada selisih waktu sebanyak 3,13-2,82 detik. selisih tersebut didapat karena terdapat gaya gesek dengan tanah dan berat robot, sehingga robot berjalan lebih lambat.
3. SIMPULAN DAN SARAN
Simpulan yang dapat diambil berdasarkan hasil pengujian yang telah dilakukan, di antaranya:
1. Robot TABELA yang dirancang untuk sistem kendali otomatis sudah berjalan dengan baik hal ini didasari dari hasil pengujian pada masing-masing sensor. 2. Dengan sensor optocoupler dan encoder
robot bisa berhenti di jarak 20x20cm, 25x25cm dan 30x30cm dan sesnor kompas untuk robot agar tetap
pada set point yaitu 90°.
Adapun saran dari hasil pengujian yang telah dilakukan, baiknya mengganti sensor infrared dengan sensor yang lebih baik karena data yang dihasilkan tidak begitu stabil, dengan nilai yang berubah-ubah ketika pada jarak yang sama.
4. DAFTAR PUSTAKA
[1] Datasheet EMS 30 A H-Bridge juni 2013 [2] Compass Module 3-Axis HMC5883L
(#29133) Parralax, Inc 2011
[3] SHARP. (t.thn.). Sensor Infrared builder’s bonanza. New York
[5]