V
DAFTAR RIWAYAT
HIDUP
1
Nama : Fauzan Muhammad Iqbal
Jenis Kelamin : Laki-laki
Tempat/Tanggal Lahir : Tasikmalaya, 27 Juni 1990
Alamat : Jl. Sukagalih No 08 RT/RW 003/010 Kel Lengkongsari Kec Tawang Kota Tasikmalaya
Telepon : 0265-339690/085223576403/081809010913
Agama : Islam
Email : [email protected]
Tinggi/berat : 168 cm /54kg
A. Formal
1. SD Negeri 1 Tasikmalaya : 1996 - 2002
2. SMP N 2 Tasikmalaya : 2002 - 2005
3. SMA N 4 Tasikmalaya : 2005 - 2008
4. UNIVERITAS KOMPUTER INDONESIA / Teknik Komputer (S1) : 2008- 2013 B. Non Formal
1. Desain Grafis (3D Studio Max, Adobe Premier, Adobe After Effect) di TRIGUNA : 3 Bulan (2007)
2. English Club : 2005-2006
3. Kursus Gambar (Manga/Komik) : 2006-2008
Skripsi : Perancangan Mekatronika (Mekanik Elektronika) Robot Tanam Benih Langsung (RO-TABELA)
1. OSIS (Organisasi Siswa) SMP N 2 Tasikmalaya 2. Humas Pramuka SMP N 2 Tasikmalaya
3. EC (English Club) SMA N 4 Tasikmalaya DATA PRIBADI
PENDIDIKAN
KARYA ILMIAH
2 4. Wakil Ketua Tae Kwon Do SMA N 4 Tasikmalaya
5. HIMA (Himpunan Mahasiswa) Universitas Komputer Indonesia
6. Asisten Lab. Elektronika di Jurusan Teknik Komputer-FTIK-UNIKOM Tahun 2011-2013
7. Koordinator Bidang Penelitian dan Materi Lab. Elektronika Teknik Komputer Universitas Komputer Indonesia 2011-2012
8. Tim Riset Lab. Elektronika di Jurusan Teknik Komputer-FTIK-UNIKOM Tahun 2011-2013
9. Ketua Tim Wirausaha Lotech-Bandung Tahun 2012-2013
Kegiatan Waktu Tempat Keterang
an INAICTA (Indonesia ICT Award) 2013
Kategori R&D (Research and Development)
dengan Karya “Robot Tanam Benih
Langsung (RO-TABELA)
2013 Jakarta Nominator
Gerakan Kewirausahaan Nasional dengan
bidang usaha „Budidaya Sidat‟ 2013 Jakarta Pemenang
“Mastery Your Business” In Shell
LiveWIRE 2nd Business Coaching for BSA 2012 Finalists
2013 Bandung Pemenang
INAICTA (Indonesia ICT Award) 2012 Kategori Start-Up Company dengan Karya
“lotech Bandung (local technology Bandung)
2012 Jakarta Nominator
AIJB (Anugrah Inovasi Jawa Barat) 2012 Kategori Energi dengan Karya “Smart & Green Trafic Light dengan pewaktuan fleksibel”
2012 Bandung Finalis
3
(PMW) Kopertis
wilayah IV
/Peserta
Pelatihan Enterpreneurship ICT
“pemanfaatan social media untuk pemasaran yang efisien dan efektif bagi para Start-Up bisnis
2012 Bandung Peserta
Panitia workshop “interfacing level pemula” 2012 Bandung Panitia Seminar Karya Ilmiah dengan Judul Karya
“Perancangan Sistem Kendali dan Pemantauan Lampu Lalu Lintas
Menggunakan Sumber Tegangan Alternatif”
2012 Cirebon Finalis
Seminar “robot technology dan
technopreneurship” 2011
Sumdang SMK N 1 Sumedang
ii
PERANCANGAN MEKATRONIKA (MEKANIK
ELEKTRONIKA) ROBOT TANAM BENIH LANGSUNG
(RO-TABELA)
TUGAS AKHIR
Disusun untuk memenuhi syarat kelulusan pada Program Studi Strata Satu di Sistem Komputer
Oleh
Fauzan Muhammad Iqbal
1.02.08.012
Pembimbing
Agus Mulyana, M.T
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
BANDUNG
i v
✁✂ ✁✄ ☎ ✆✝ ✁✆✂✁✞
Segala puji bagi Allah SWT., Pencipta dan Pemelihara alam semesta,
shalawat serta salam semoga terlimpah bagi Muhammad SAW., keluarga dan para
pengikutnya yang setia hingga akhir masa.
Atas rahmat Allah SWT., akhirnya Penulis dapat menyelesaikan Skripsi
ini, meskipun proses belajar sesungguhnya tak akan pernah berhenti. Skripsi ini
sesungguhnya bukanlah sebuah kerja individual dan akan sulit terlaksana tanpa
bantuan banyak pihak yang tak mungkin Penulis sebutkan satu persatu, namun
dengan segala kerendahan hati, Penulis mengucapkan terima kasih kepada
1. Kedua orang tua, adik-adik dan keluarga besar tercinta yang senantiasa
tidak henti-hentinya mencurahkan cinta, kasih sayang, perhatian, nasihat,
serta motivasi kepada penulis selama studi.
2. Bapak Dr. Ir. Eddy Suryanto Soegoto, M.Sc, selaku Rektor Universitas
Komputer Indonesia.
3. Bapak Dr. Wendi Zarman, M.Si selaku Ketua Jurusan Teknik Komputer,
Universitas Komputer Indonesia.
4. Bapak Ir. Syahrul, M.T, selaku Dosen Wali kelas 08 TK-1.
5. Bapak Agus Mulyana, M.T, selaku Pembimbing I dan Koordinator
Lab.Elektronika yang telah banyak memberikan arahan, saran, nasihat,
motivasi dan bimbingan kepada Penulis selama menempuh studi.
6. Bapak dan Ibu seluruh staf dosen Jurusan Teknik Komputer dan yang
pernah mengajar penulis serta seluruh Staff Administrasi Universitas
Komputer Indonesia, yang telah banyak memberikan ilmu, motivasi dan
bantuan kepada penulis.
7. Teman teman keluarga besar Laboratorium Elektronika, Ardi Kurniawan,
Hadi Kusumah, Awal Arif Budiman, Oki Tri Suswanto, Heri Susanto, Ega
Dwi R, Syam Sofyan Nurdin, ERG Junior, terima kasih atas dukungannya,
v
v
8. Teman teman angkatan 2008, khususnya kelas 08 TK-1, Rudi Hermawan,
Sopian Alfiana, Luthfan H, Reggy P Trinanda, Hayi Akbar, Tulus Prabudi,
Budiana yang telah banyak membantu selama studi maupun selama proses
perkuliahan.
9. Semua pihak yang telah banyak membantu yang tidak dapat penulis
sebutkan satu persatu, terima kasih banyak atas bantuan, dukungan dan
motivasinya selama melaksanakan studi dan menyelesaikan Skripsi ini.
Akhirnya, Penulis berharap semoga penelitian ini menjadi sumbangsih
yang bermanfaat bagi dunia sains dan teknologi di Indonesia, khususnya disiplin
keilmuan yang Penulis dalami.
Bandung, Agustus 2013
✟ ✠✠✠ ✡☛☞ ✌☛✍ ✎✏ ✎
✑✒ ✓ ✔✕✖✗✒ ✖✘YATAAN ...E✙✙ ✚✙! Bookmark not defined.
KATA PENGANTAR ...Error! Bookmark not defined.
ABSTRAK ...Error! Bookmark not defined.
ABSTRACT ...Error! Bookmark not defined.
DAFTAR ISI... viii
DAFTAR GAMBAR ...Error! Bookmark not defined.
DAFTAR TABEL ...Error! Bookmark not defined.
BAB I
PENDAHULUAN...Error! Bookmark not defined.
1.1 LATARBELAKANG...ERROR! BOOKMARK NOT DEFINED.
1.2 RUMUSANMASALAH...ERROR! BOOKMARK NOT DEFINED.
1.3 BATASANMASALAH...ERROR! BOOKMARK NOT DEFINED.
1.4 METODEPENELITIAN...ERROR! BOOKMARK NOT DEFINED.
1.5 SISTEMATIKAPENULISAN...ERROR! BOOKMARK NOT DEFINED.
BAB II
LANDASAN TEORI...Error! Bookmark not defined.
2.1 TANAMBENIHLANGSUNG...ERROR! BOOKMARK NOT DEFINED.
2.2 MIKROKONTROLERBASICSTAMP2SXDANBS2....ERROR! BOOKMARK NOT
DEFINED.
2.3 MOTORSERVO...ERROR! BOOKMARK NOT DEFINED.
2.4 SELSURYA...ERROR! BOOKMARK NOT DEFINED.
i x
2.6 ADC (ANALOG TODIGITALCONVERTER)..ERROR! BOOKMARK NOT DEFINED.
2.7 SENSORINFRAMERAH...ERROR! BOOKMARK NOT DEFINED.
BAB III
PERANCANGAN SISTEM ...Error! Bookmark not defined.
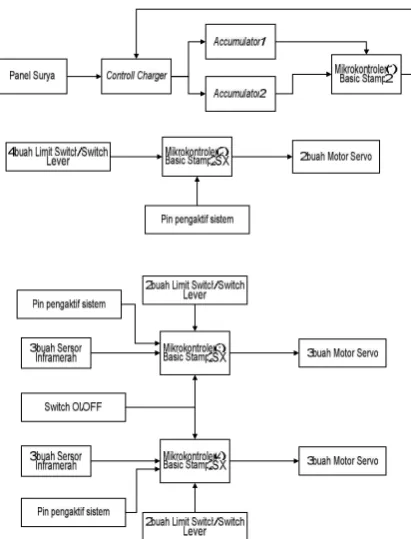
3.1 DIAGRAMBLOKSISTEM...ERROR! BOOKMARK NOT DEFINED.
3.2 PERANCANGANPERANGKATKERAS...ERROR! BOOKMARK NOT DEFINED.
3.2.1 Desain...Error! Bookmark not defined.
3.2.2 Material dan dimensi robot ...Error! Bookmark not defined.
3.2.3 Bentuk jadi robot tanam benih langsung...Error! Bookmark not
defined.
3.3 PERANCANGANPERANGKATLUNAK...ERROR! BOOKMARK NOT DEFINED.
3.3.1 Diagram alir atauflowchartdeteksi ketersediaan benih ...Error!
Bookmark not defined.
3.3.2 Diagram alir penggali lubang, penabur benih dan penabur debu..Error!
Bookmark not defined.
3.3.3 Sistem kontrol switch tegangan accumulator memanfaatkan relay
dan ADC...Error! Bookmark not defined.
BAB IV
PENGUJIAN DAN ANALISA...Error! Bookmark not defined.
4.1 TORSI MOTOR...ERROR! BOOKMARK NOT DEFINED.
4.2 MEKANIKPENGGALI...ERROR! BOOKMARK NOT DEFINED.
4.3 PENGUJIAN MEKANIK PENABUR BENIH....ERROR! BOOKMARK NOT DEFINED.
4.3.1 Pengujian mekanik penabur benih dan debu pada benih padi ...Error!
x
4.3.2 Pengujian mekanik penabur benih dan debu pada benih kacang hijau
...Error! Bookmark not defined.
4.3.3 Pengujian mekanik penabur benih dan debu pada benih kacang kedelai
...Error! Bookmark not defined.
4.4 PENGUJIAN SISTEM DETEKSI KETERSEDIAAN BENIH.ERROR! BOOKMARK NOT
DEFINED.
4.5 PENGUJIAN SISTEMSUPPLYTEGANGAN....ERROR! BOOKMARK NOT DEFINED.
4.6 ANALISA LAMA KERJA...ERROR! BOOKMARK NOT DEFINED.
BAB V
SIMPULAN DAN SARAN ...Error! Bookmark not defined.
BAB VI
✛
BAB I
PENDAHULUAN
1.1 Latar Belakang
K✜✢ ✜✣ ✤✥✦✧ ★ ✦✣ ✤ ✢ ✩✢✤✪ ✤✫ ✤ ✦✬ ✥✤ ✧ ✥✬✦✥✩✭✤✧ ✣ ✦✮ ✢ ✩✮✯✦✣✤ ★✬✤✜ ✬✤✥✦✧ ✣✦✪ ✦✢
★ ✩✢✰✦✮✭✱✮ ✦✮ ★ ✩✬✥✦✮ ✤✦✮ ✣ ✦✮ ✧ ✩✰✦ ✭✦✤ ✢✦✫✦✮ ✦✮ ✱✥✦✢✦ ✢✦✧✲ ✦✬✦✫ ✦✥ I✮✣✜✮ ✩✧✤✦,
✧ ✩✳✤✮ ✭✭ ✦ ★ ✩✢ ✩ ✬✤✮✥✦✳ ✢✩✢✰✩✬✤✫ ✦✮ ★✬ ✤✜✬✤✥✦✧ ✥✤✮✭ ✭✤ ✣✦✪ ✦✢ ✱★ ✦✲ ✦ ★ ✩✮✤✮ ✭✫ ✦✥✦✮
★ ✬✜✣✱✫✧ ✤ ★✦✣✤✴ N✦✢✱✮✪ ✦✯✱ ★✩✮ ✤✮✭ ✫✦✥✦✮ ★✬ ✜✣✱✫ ✥✤✵✤✥✦✧ ★ ✦✣ ✤ ✧ ✦✶✦✳ ✧ ✩✷✦✬✦✮ ✦✧ ✤✜✮ ✦✪
✣✦✪ ✦✢ ✰✩✰✩✬ ✦★✦ ✥✦✳✱✮ ✥✩✬✦✫✳ ✤✬ ✷✩✮✣✩✬✱✮✭ ✢ ✩✪ ✦✮✣ ✦✤, ✰✦✳ ✫ ✦✮ ✣✤ ✰✩✰✩✬✦★ ✦ ✪ ✜ ✫✦✧ ✤
★ ✬✜✣✱✫✥✤✵✤✥✦✧ ✮✲ ✦✷✩✮✣ ✩ ✬✱✮✭✢ ✩✮✱✬✱✮✴
✸✩✰✩✬ ✦★✦ ✥✦✳✱✮ ✥✩ ✬✦✫✳✤✬, ★✬ ✜✣✱✫ ✧✤ ★✦✮ ✭✦✮ ✣✱✮✤ ✦ ✢ ✩✮ ✭✦✪ ✦✢✤ ★✩✮✱✬✱✮ ✦✮
✲ ✦✮ ✭ ✷✱✫✱★ ✰✩✧ ✦✬✴ S✩✢ ✩ ✮✥✦✬✦ ✤✥✱✹ ✫ ✩✰✱✥✱✳✦✮ ★✦✮ ✭✦✮ ✣✱✮✤✦ ✣ ✦✬ ✤ ✶✦✫✥✱ ✫ ✩ ✶✦✫✥✱
✥✩✬✱✧✢ ✩✮ ✭✦✪✦✢ ✤★ ✩✮✤✮ ✭✫ ✦✥✦✮ ✧✩✤✬ ✤✮✭✣✩✮✭ ✦✮✰✩✬ ✥✦✢✰✦✳ ✮✲ ✦ ✯✱✢✪ ✦✳ ★ ✩✮✣✱✣✱✫✣✦✮
✫ ✩✤✮✭✤✮ ✦✮✱✮ ✥✱✫✥✩✬✱✧✢ ✩✢ ★ ✩✬✥✦✳ ✦✮ ✫✦✮✳ ✤✣✱★✴
S✦✪ ✦✳ ✧✦✥✱ ★✩✮✲ ✩✰✦✰ ★ ✩✪ ✦✮✣ ✦✤✦✮✺ ★✩✮✱✬✱✮ ✦✮ ★ ✬✜✣✱✫✥✤✵✤✥✦✧ ★ ✦✣ ✤ ✧ ✦✶✦✳
✦✣✦✪ ✦✳ ✫ ✦✬ ✩✮✦ ✫ ✩✥✤✣ ✦✫✢ ✦✢ ★✱✦✮✢ ✩✪ ✦✫ ✧ ✦✮✦✫ ✦✮ ✦✮✯✱✬✦✮ ✥✩✫✮ ✜✪ ✜ ✭✤✣✤ ✥✤✮ ✭✫✦ ✥ ✱✧ ✦✳ ✦
✥✦✮ ✤ ✧ ✩✪ ✦✤✮ ✤✥✱ ★ ✩✮✩✬✦★ ✦✮ ✥✩✫ ✮✜✪ ✜✭✤ ✱✢✱✢✮✲ ✦ ✣✦✬ ✤ ✥✦✳✱✮ ✫✩ ✥✦✳✱✮ ✥✤✣ ✦✫ ✰✩✬✰✩✣ ✦
✦✥✦✱ ✥✤✣ ✦✫ ✰✩✬✫✩✢✰✦✮ ✭,✫✳✱✧✱✧ ✮✲ ✦ ✣ ✦✪ ✦✢ ✳✦✪ ✤✮✤✦✣✦✪ ✦✳ ✥✩✫✮ ✜✪ ✜ ✭✤ ✥✦✰✩✪ ✦(T✦✮✦✢
✸✩✮✤✳ L✦✮ ✭✧✱✮ ✭)✴
S✤✧ ✥✩✢ ✥✦✰✩✪ ✦ ✥✩✪ ✦✳ ✪ ✦✢✦ ✣ ✤✫ ✩✮✦✪ ✢✦✧✲ ✦✬✦✫ ✦✥ I✮✣ ✜ ✮✩✧ ✤✦ ✧ ✩✰✦✭ ✦✤ ✧✤✧ ✥✩✢
✥✬✦✣✤✧ ✤✜✮ ✦✪ ✰✱✣✤✣ ✦✲ ✦ ★ ✦✣✤ ★ ✦✣ ✦ ✪ ✦✳✦✮ ✧✦✶✦✳ ✰✩✬✪✱✢★✱✬ ✲ ✦✮ ✭ ✥✩✪ ✦✳ ✣ ✤✜✪ ✦✳ ✧✩✷✦✬ ✦
✧ ✩✢ ★✱✬ ✮✦✴ S✤✧ ✥✩✢ ✥✦✰✩✪ ✦ ✲ ✦✮ ✭ ✦✣✦ ✱✢✱✢ ✮✲ ✦ ✢ ✩✬✱★ ✦✫✦✮ ✧ ✤✧ ✥✩✢ ✥✦✰✩✪✦ ✢✦✮✱✦✪
✣✤✢ ✦✮ ✦ ✧ ✤✧ ✥✩✢ ✤✮ ✤ ✳✩✢ ✦✥ ✩✮✩✬ ✭✤ ✥✩✥✦★✤ ✳✦✧✤✪ ★✬ ✜✣✱✫ ✧ ✤ ★ ✦✣ ✤ ✫✱✬✦✮✭ ✜ ★✥✤✢ ✦✪, ✥✦✥✦
✪ ✩✥✦✫ ✰✩✮ ✤✳ ✥✤✣✦✫✥✩✬✦✥✱✬ (✪ ✦✬ ✤✫ ✦✮✻ ✰✦✬ ✤✧ ✦✮) ✧ ✩✳✤✮✭ ✭✦ ★ ✩✬✥✱✢✰✱✳✦✮✫✱✬✦✮ ✭ ✜★ ✥✤✢✦✪
✼
✽✾✿❀ ✾❁I❂❃S❄❅❆❇ ✿❈❇ ❁❉ ✾❆ ✾❀ ❇❊ ✾❈ ❋● ❍❇● ❅ ❄❋●✾❊
■❏✾❑ ▲● ❑❇ ❁❈ ❇ ✿❀✾●▼✾● ✾❊✾❆ ❆ ✾❀❇❊ ✾ ◆ ❄●▼▼✾ ❅ ✾✾❆ ❄● ❄ ❀❇❊▲✿ ❁✾✿✾◆
❊ ❄●▼❈▲●▼✾● ❖P ✾❄❆▲❏❇●▼✾● ✿❇●▼ ▼ ▲●✾❈✾●❀✾◆ ✾●❀✾❈ ✾❁✿ ❄● P ✾❈ ❂K❇❆❇ ❁ ❅❇❏❄✾✾● ❆❇● ✾▼✾
❈ ❇ ❁❉✾✾❆ ✾▲❀▲❁▲◆❆ ✾●❄✿▲❊ ✾❄❀ ❇ ❁❈▲❁✾●▼❈✾❁❇● ✾❀✾● P ✾❈▼❇●❇❁✾❅ ❄✿▲❏✾❇●▼ ▼✾● ▲● ❆▲❈
❆❇ ❁❉▲● ❈ ❇ ❑❇ ❁❆ ✾● ❄✾● P ✾●▼ ✿❇● P❇❀ ✾❀ ❈ ✾● ❆❇● ✾▼✾ ❈ ❇ ❁❉✾ ❑❇❆ ✾●❄ ❀ ❇ ❁❈▲❁✾●▼ ❅❇◆ ❄●▼▼✾
❑❁❋❏▲❈ ❅ ❄❑✾❏❄ ❄❈▲❆❀ ❇ ❁❈▲❁✾●▼, ❋❊❇◆❈✾❁❇●✾❄❆▲ ❏❄❀▲❆▲◆ ❈ ✾● ❅▲✾❆▲❅ ❄❅❆❇ ✿P ✾●▼ ❏✾❑✾❆
✿❇●▼✾❆ ✾❅❄ ✿✾❅ ✾❊ ✾◆ ❆❇ ❁❅❇❀▲❆ ❅❇◆ ❄●▼ ▼✾ ❏✾❑✾❆ ✿❇ ✿❀ ✾● ❆▲ ❑❁❋❏▲❈ ❅ ❄ ❑✾❏❄ ❅❇◗✾❁✾
❋❑❆ ❄✿ ✾❊ ❅❇ ❁❆ ✾ ❇ ❘❄❅ ❄❇● ✾❆✾▲ ❁✾✿✾◆ ❊ ❄●▼❈▲●▼✾● P ✾●▼ ❀ ❇❈❇ ❁ ❉✾ ❋❆ ❋✿ ✾❆ ❄❅(❆ ✾●❑✾
❋❑❇ ❁ ✾❆ ❋ ❁❙❏❄❏❋ ❁❋●▼ ✿✾●▲✾❊)❂
1.2 Rumusan Masalah
M❇❈✾● ❄❅ ✿❇❈❇ ❁ ❉✾✾❊ ✾❆ ❏✾❊ ✾✿ P❇ ❁ ✾●◗✾●▼✾● T▲▼✾❅■❈ ◆ ❄❁❄● ❄ ✿❇❊ ❄●▼❈▲❑❄❏ ▲✾
❅ ❄❅❆❇ ✿ ❈❇ ❁ ❉✾ ✾● ❆ ✾❁✾ ❊ ✾❄● ✾❏✾❊ ✾◆ ✿❇❈✾● ❄❅ ✿❇ ❑❇●✾❀▲❁✾● ❀ ❇● ❄◆ ❅❇ ❁❆ ✾ ✿❇❈✾● ❄❅ ✿❇
❅▲✿❀❇ ❁ ❇●❇ ❁▼❄❂ M❇❈✾●❄❅✿❇ ❑❇●✾❀▲❁✾● ❀❇●❄◆ ✿❇❊ ❄❑ ▲❆ ❄ ❑❇ ✿❀▲✾❆ ✾● ❊▲❀ ✾●▼ ❆ ✾●✾✿,
❑❇● ✾❀▲❁ ✾● ❀❇●❄◆❑✾❏❄❅❇ ❁❆ ✾❑❇●▼▲❀▲❁ ✾● ❀❇●❄◆ ✿❇●▼▼▲●✾❈ ✾● ❏❇❀▲❂ S▲✿❀❇ ❁❇●❇❁▼❄
P ✾●▼ ❏❄▼ ▲● ✾❈✾● ✿❇ ❁▲❑✾❈ ✾● ❅▲✿❀ ❇ ❁ ❆❇●✾▼✾ ✾❊❆❇ ❁●✾❆ ❄❘ ❅❇❊ ❅▲❁P ✾ P ✾●▼ ❏❄❊❇●▼❈✾❑❄
❏❇●▼✾● ❅❄❅❆❇ ✿❆❇▼✾●▼✾●❁❇❏▲●❏✾● ❅ ❄, P ✾❈●❄❑❇ ❁▼✾●❆ ❄✾●❅▲✿❀❇ ❁❆❇▼✾●▼✾●❉❄❈✾❆❇●✾▼✾
❭
❪❫❴ ❵ ❪❛ ❴ ❫❴❜❝ ❞❡ ❫❢ ❡❞❣ ❞ ❞❤ ❫❢✐ ❡ ❞❫❪❥ ❦❢ ❡ ❣❣ ❞❡❫❪, ❵ ❞❤ ❞❧ ❜ ❞❤ ❪❡ ❪ ❛❞❫❢✐ ❞❪ ♠ ♥♥♦♣ ♦q♠ rs t
✉❞❵ ❞❡❣ ❞❡✈
1.3 Batasan Masalah
P❞❵ ❞ ❦❢✐ ❞❡ ✉❞❡ ❣❞❡ R✇❛ ✇ ❫ ❫❞❛ ❢❤ ❞ ❪❡❪ ❫❢✐ ❵ ❞❦❞❫ ❛ ❢❛❢✐❞❦❞ ❛❞❫❞① ❞❡ ❧ ❞① ❞❤ ❞❜
❵❢ ❡❣ ❞❡ ❧ ❞❝① ❴ ❵ ❞❣❞✐ ❦❢ ❧❛❞❜❞① ❞❡ ❵❞❦ ❞❫ ❵ ❪❤ ❞❝ ❴❝❞❡ ① ❢ ✉❞✐ ❞ ❫❢✐ ❞✐❞❜ ❵ ❞❡ ❫❢✐ ✉❞❦ ❞❪
① ❢① ❴❞❪② ❞❡ ❣❵ ❪❜❞✐❞❦❝❞❡③❵❪❞❡ ❫❞✐ ❞❡② ❞④
⑤✈ ⑥❪❣❴ ❡❞❝❞❡❵❴ ❞❛❴❞❜♠♥♥♦♣ ♦ q♠rst① ❢❛ ❞❣ ❞❪❦❢ ❡② ❪❧❦ ❞❡❫❢❣❞❡ ❣❞❡
⑦ ✈ J❞✐ ❞❝ ✐ ❴❞① ❦❢ ❡② ❪❧❦❞❡ ❞❡⑧ ❫❞❛ ❴✐ ❞❡❛❪❛ ❪❫ ①❢✐❫❞❦❢ ❡❣ ❴❛❴✐❞❡❛❢ ❡ ❪❜ ❵❢ ❡❣ ❞❡ ❵❢❛❴
❞❵ ❞❤ ❞❜⑦ ⑨ ✉❧⑩⑦ ⑨✉❧, ⑦ ❶ ✉❧ ⑩⑦ ❶ ✉❧, ❭ ⑨ ✉❧⑩❭⑨✉❧❵ ❪❞❫❴✐① ❢ ✉❞✐ ❞❧❞❡❴ ❞❤
❭ ✈ J❴❧❤ ❞❜❛❢ ❡ ❪❜② ❞❡❣❵❪❫❞❛❴✐❝ ❞❡❫❪❞❦❤ ❴❛❞❡ ❣❡② ❞❛ ❢✐ ❷❴❧❤ ❞❜❸⑤❛ ❴ ❞❜
❹ ✈ T❢✐ ❵❞❦ ❞❫ ①❢ ❡① ✇✐ ❪❡ ❥✐ ❞❧ ❢✐ ❞❜ ❴❡ ❫❴❝ ❵❢ ❫❢❝ ① ❪ ❝ ❢ ❫❢✐① ❢ ❵❪❞ ❞❡ ❛❢ ❡ ❪❜ ❵❢ ❡ ❣❞❡
❪❡ ❵❪❝❞❫✇✐ L❺ ⑥
❶ ✈ S❪① ❫❢❧ ❦❢ ❡❣❴❛ ❴✐ ❞❡ ❵❢❛❴ ❛ ❢✐① ❪❥❞❫ ✇❦ ❫❪✇ ❡❞❤ (❛ ❪① ❞ ❵❪❣ ❴❡ ❞❝ ❞❡ ❞❫❞❴❦ ❴❡ ❫❪❵❞❝
❵ ❪❣❴❡ ❞❝❞❡③❵❢ ❡ ❣❞❡❦❢ ❡❣ ❞❝ ❫❪❥❛ ❢✐ ❴❦ ❞❦❴① ❜❻N❼O❽❽)
❾❵ ❞❦❴ ❡ ❪❡❵ ❪❝ ❞❫✇✐ ❝❢❛ ❢✐ ❜ ❞① ❪❤ ❞❡ ② ❞❡ ❣ ❵ ❪❧ ❞❝ ① ❴❵❝ ❞❡ ❞ ❣❞✐ ❦❢ ❡✉❞❦ ❞❪❞❡
❝ ❢❛❢✐ ❜ ❞① ❪❤ ❞❡❵ ❞❦ ❞❫❵❪❝ ❢ ❫❞❜ ❴❪, ❞❡❫❞✐ ❞❤ ❞❪❡ ④
⑤✈ ⑥❞❦ ❞❫❧❢❤ ❴❛ ❞❡ ❣❪❤ ❞❜❞❡❫❞❡ ❞❧
⑦ ✈ J❞❫❴ ❜❡② ❞❛ ❢ ❡❪❜❵❞❦ ❞❫❫❢✐❵❢ ❫❢❝ ① ❪①❢ ❡① ✇✐
❭ ✈ T❪❞❦❤ ❴❛ ❞❡ ❣❫❞❡ ❞❧❫❢✐ ❫❞❡ ❞❧ ❸⑤❛❴❫❪❜❛❢ ❡ ❪❜
❹ ✈ I❡ ❫❢ ❣✐❞① ❪①❢❤① ❴✐ ② ❞❵❢ ❡ ❣❞❡❛ ❞❫❢✐ ❞❪♠ ♥♥♦♣ ♦q♠ rs t
1.4 Metode Penelitian
M❢ ❫✇ ❵✇❤ ✇❣ ❪❦❢ ❡❢❤ ❪❫❪❞❡② ❞❡ ❣❵❪❤ ❞❝❴❝❞❡❵ ❞❤ ❞❧ ❦❢✐❞❡✉❞❡ ❣❞❡ T❴ ❣ ❞①❾❝❜❪✐ ❪❡ ❪
❧ ❢❤ ❪❦❴ ❫❪④
➃
S➄➅➆ ➄ ➇➈➆➉ ➊➈ ➋➈➌ ➍➄ ➇➋ ➄➎➅➌ ➊➅➆➅ ➊➈➌➍➅➌ ➇➈ ➎➅ ➏ ➄➏➅➌ ➋➈ ➇➐➈ ➎➅ ➑➅ ➒➅➌ ➐ ➈ ➒➐ ➅ ➍➅ ➓
➇➅➔➅ ➇➐➄➏ ➄→➅ ➒➆ ➓➏➈ ➎➣➅ ➌ ➍➇➈➌➊➄ ➏➄➌➍ T➄ ➍➅↔↕ ➏➙ ➓➒➓➌➓➛
➜➛ Observasi
M➈ ➎➅ ➏ ➄➏➅➌ ➋➈➌➍➅ ➇➅➆➅➌ ➉ ➐ ➑➈ ➏ ↔ ➈ ➒➆➅ ➇➈ ➎➅ ➏ ➄➏➅➌ ➏➉ ➌↔ ➄ ➎➆➅↔ ➓, ➐➈ ➒➓➌ ➆➈ ➒➅ ➏↔ ➓
➊➈➌ ➍➅➌ ➉ ➒➅➌➍➆ ➈ ➒➏➅ ➓➆➛
➝➛ P➈ ➒➅➌ ➔➅➌➍➅➌↕ ➎➅➆
M➈➌➍➅ ➋ ➎➓➏➅↔ ➓➏➅➌ ➆➈➉➒➓ ➣➅➌➍➊ ➓➊➅ ➋➅➆ ➊➅ ➒➓ studi literatur, observasi ➊➅➌ ➙➅↔ ➓➎
➐➓➇➐➓➌ ➍➅➌→ ↔ ➈ ➙➓➌➍ ➍➅ ➆➈ ➒↔ ➄↔ ➄➌ ↔ ➄➅➆ ➄ ➋➈ ➒➅➌➔ ➅➌ ➍➅➌ ↔ ➓↔ ➆➈ ➇ ➄➌ ➆ ➄➏ ➋➈ ➒➅➌➍➏➅➆
➏➈ ➒➅↔ →➋➈ ➒➅➌➍➏➅➆➎➄➌ ➅ ➏➊➅ ➌➋➈➌ ➍ ➄➑➓➅➌↔ ➓↔ ➆➈ ➇➛
➃➛ Exsperimental
M➈ ➎➅ ➏ ➄➏➅➌ eksperimental ➅➆➅ ➄ ➋➈➌➍➄ ➑➓➅➌ ➅ ➎➅➆, ➏➉➇➋➉➌ ➈➌ ➊➅➌ ➔➅ ➒➅ ➏➈➒➑➅
↔ ➓↔ ➆➈ ➇➛
➞➛ ↕➌ ➅ ➎➓↔ ➓↔➊➅➌➟ ➓➇➋ ➄➎➅➌
M➈➆➉➊➈ ➅➌➅ ➎➓↔ ➅ ➄➌➆ ➄ ➏ ➇➈➌➍➈➆➅ ➙ ➄➓ ➙➅↔ ➓➎➊➅ ➒➓ ➋➈ ➒➅➌ ➔➅➌➍➅➌ ↔ ➓↔ ➆➈ ➇ ➣➅➌➍➆➈ ➎➅ ➙
➊ ➓➐ ➄➅➆, ➅ ➋➅ ➏➅ ➙↔ ➄➊➅ ➙➐ ➈ ➒ ➙➅↔ ➓➎↔ ➈↔ ➄➅ ➓➊➈➌➍➅➌ ➣➅➌➍ ➊➓➒➈➌ ➔➅➌➅ ➏➅➌ ➅➆➅ ➄➐➈ ➎➄ ➇➛ S➈ ➎➅➌➑➄➆➌➣➅ ➅ ➏➅➌ ➊ ➓➎➅ ➏ ➄➏➅➌ ➋➈➌ ➍ ➄➑➓➅➌ ↔➈➔ ➅ ➒➅ ➋ ➒➅ ➏➆ ➓↔ ➊➅➌ ➑➓➏➅ ➆➈ ➒➊➅ ➋➅➆
➏➈ ➏➄ ➒➅➌➍➅➌ ➇➅ ➏➅ ➅ ➏➅➌ ➊ ➓➎➅ ➏➄ ➏➅➌ ➐ ➈➐➈ ➒➅ ➋➅ ➋➈ ➒➐➅ ➓➏➅➌ ↔ ➓↔ ➆➈ ➇ ↔➈ ➙ ➓➌ ➍ ➍➅
➅ ➏ ➙➓➒➌➣➅ ➊➅ ➋➅➆➊ ➓➅ ➇➐➓➎↔ ➈➐ ➄➅ ➙↔ ➓➇➋ ➄➎➅➌ ➊➅ ➒➓➋➈➌➈ ➎➓➆ ➓➅➌ ➓➌➓➛
1.5 Sistematika Penulisan
U➌ ➆ ➄➏ ➇➈ ➇ ➄➊➅ ➙➏➅➌ ➋➈➌ ➄ ➎➓↔ ➅➌ ➊➅ ➎➅ ➇ ➋➈➌➣➄↔ ➄➌ ➅➌ ➎➅ ➋➉ ➒➅➌ T➄ ➍➅↔ ↕ ➏ ➙➓➒
➏➈➅ ➒➅ ➙ ➣➅➌➍ ➊➓➇➅ ➏↔ ➄➊ → ➇➅ ➏➅ ➊➓➍ ➄➌ ➅ ➏➅➌ ↔ ➓↔ ➆➈ ➇➅➆ ➓➏➅ ➋➈➌➄➎➓↔ ➅➌ ➎➅ ➋➉ ➒➅ ➌ ➣➅➌➍
➌ ➅➌➆ ➓➌➣➅➅ ➏➅➌ ➇➈ ➇ ➋➈ ➒ ➇➄ ➊➅ ➙➋➈ ➇➐ ➅ ➙➅↔ ➅➌→➇➈ ➎➓➋ ➄➆ ➓➠
➡↕➡ I ➠ P➈➌➊➅ ➙ ➄➎➄➅➌
➡➅➐ ➓➌ ➓ ➐ ➈ ➒➓↔ ➓ ➆➈➌ ➆➅➌➍ ➎➅➆➅ ➒ ➐➈ ➎➅ ➏➅➌➍, ➇➅ ➏↔ ➄➊ ➊➅➌ ➆ ➄ ➑➄➅➌→ ➐➅➆➅↔ ➅➌
➢
➤➥ ➤ II ➦ L➧➨➩➧➫ ➧➨➭ ➯➲➳ ➵
➤ ➧➸ ➵➨ ➵ ➺➯➺ ➸➧➻➧➫ ➼➯➨➼➧➨➽ ➼➯➲➳ ➵➾➼➯➲➳ ➵ ➚➯➨➩➪➶ ➪➨➽ ➹➧➨➽ ➩➵➽ ➪➨➧➶➧➨
➩➧➘➧➺➚➯➳ ➯➨➴➧➨ ➧➧➨➩➧➨➚➯➺ ➸ ➪➧➼➧➨➼➪➽➧➫➧➶ ➻➵➳
➤➥ ➤ III ➦ P➯➳ ➧➨➴➧➨➽➧➨➷➵➫➼➯➺
➤ ➧➸ ➵➨➵ ➸➯➳ ➵➫ ➵➶➧➨ ➼➯➨➼➧➨➽ ➚➯➳ ➧➨➴➧➨➽➧➨ ➧➘➧➼ ➹➧➨➽ ➩ ➵➸➪➧➼ ➪➨➼➪➶ ➼➪➽➧➫
➧➶➻➵➳ ➵➨➵, ➺➯➘➵➚ ➪ ➼➵ ➽➧➳➵➫ ➸➯➫ ➧➳ ➫ ➵➫➼➯➺, ➚➯➳➧➨➴➧➨➽➧➨ ➚➯➳ ➧➨➽➶➧➼ ➶➯➳ ➧➫
➩➧➨➚➯➳ ➧➨➴➧➨➽➧➨software➹➧➨➽➩➵➽ ➪➨➧➶➧➨➬
➤➥ ➤ IV ➦ P➯➨➽ ➪➮➵➧➨➩➧➨➥ ➨➧➘➵➫ ➧
➤ ➧➸ ➵➨➵ ➸➯➳➵➫ ➵ ➼➯➨➼➧➨➽ ➚➯➨➽➪➮➵➧➨ ➚➯➨➽ ➪➮➵➧➨ ➩➧ ➨ ➧➨➧➘➵➫ ➧ ➩➧➼➧ ➚➧➩➧
➼➪➽➧➫➧➶ ➻➵➳➵➨➵➬
➤➥ ➤ V ➦ S➵➺ ➚ ➪➘➧➨➩➧➨➷➧➳ ➧➨
6
BAB II
LANDASAN TEORI
2.1 Tanam Benih Langsung
Atabela/tabela adalah alat tanam benih langsung yang digunakan untuk
membantu melakukan penanaman dengan tanpa melakukan persemaian terlebih
dulu. Sehingga cara ini sangat potensi pada berkurangnya tingkat stres tanaman
padi.
Ada tiga macam cara tanam benih langsung yang umum digunakan:
1. Sistem sebar rata.
2. Sistem sebar dalam alur/barisan (tabela jarak tanam satu arah).
3. Sistem tegel (tabela dengan jarak tanam dua arah).
7
Tersedianya varietas unggul berumur muda, harga herbisida yang
terjangkau petani, serta buruh tani yang langka dan mahal telah mendorong petani
padi pada lahan irigasi di beberapa Negara Asia beralih dari tanam pindah (tapin)
ke tanam benih langsung (tabela). Di Indonesia, pengembangan padi tabela
menghadapi berbagai masalah, antara lain ketersediaan varietas yang adaptif yang
mampu berkecambah dalam kondisi anaerob, sistem perakaran dalam sehingga
tahan rebah, serta mempunyai anakan terbatas tetapi produktif. Masalah gulma
dan cara panen juga merupakan hambatan dalam pengembangan padi tabela. Pada
penanaman dengan cara tabur rata (broadcast seeding) atau sistem sonor, petani
sangat enggan melakukan panen secara konvensional dengan sabit karena
memerlukan tenaga kerja yang banyak. Tabela dapat mengefisiensikan tenaga
kerja dan hasil panen tinggi.
Usaha peningkatan produksi padi di Indonesia dilakukan pemerintah
melalui program intensifikasi dan ekstensifikasi. Intensifikasi dilakukan dengan
memperbaiki teknologi anjuran untuk meningkatkan produktivitas lahan,
sedangkan ekstensifikasi ditujukan untuk memperluas areal produksi. Perluasan
areal umumnya diarahkan ke lahan baru di luar Jawa serta lahan tidur atau
meningkatkan indeks panen (IP) pada lahan yang mempunyai IP rendah.
Pada sistem usaha tani padi intensif dengan tenaga kerja banyak tersedia
dan murah, sistem tanam pindah (tapin) umum dilakukan petani. Namun, di
daerah dengan tenaga kerja sukar dan mahal sementara harga mesin tanam pindah
tidak terjangkau petani, sistem tanam benih langsung (tabela) dapat menjadi
alternatif bagi petani. Kelangkaan tenaga kerja sering menyebabkan waktu tanam
terlambat, sehingga petani terpaksa menanam bibit padi yang sudah tua sehingga
hasil panen rendah. Untuk mengatasi masalah tersebut maka budi daya padi tabela
diintroduksikan. Tujuannya adalah untuk mengurangi penggunaan tenaga kerja
yang terkonsentrasi pada waktu yang bersamaan seperti pengolahan tanah dan
8
Efisiensi tenaga kerja tersebut dapat menekan biaya tenaga kerja yang mahal serta
mengejar masa tanam yang serempak dengan biaya relatif murah.
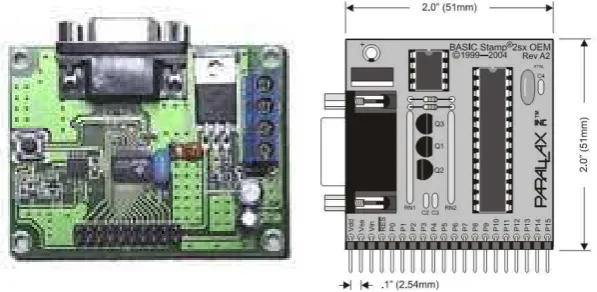
2.2 Mikrokontroler Basic Stamp 2SX dan BS2
Basic stamp adalah mikrokontroler yang dikembangkan oleh Parallax Inc
yang diprogram menggunakan format bahasa pemrograman basic. Program yang
telah dibuat akan diunduh melalui port se rial. Mikrokontroler basic stamp
membutuhkanpower supplysaat mengunduh program.
Kode pemograman basic disimpan di dalam EEPROM serial pada board
basic stamp. EEPROM menyediakan penyimpanan yang sulit diubah dan menjaga
memory saat kehilangan power. EEPROM digunakan dalam basic stamp yang
dijamin menyimpan data selama 40 tahun ke depan dan mampu ditulisi ulang
10.000.000 kali per lokasi memori.
Mikrokontroler basic stamp memiliki versi yang berbeda-beda. Basic
stamp memiliki versi, yaitu basic stamp 1,basic stamp 2, basic stamp 1e, basic
stamp2P,basic stamp2Pe danbasic stamp2sx. Pada modulbasic stampterdapat
ICregulatorLM7805 denganoutput5voltyang mengubah input 6 hingga 15volt
(pada pin VIN) turun menjadi 5voltyang dibutuhkan komponen.Basic stampyang
dipakai adalah basic stamp 2 dan basic stamp 2SX yang mempunyai 20 pin I/O.
9
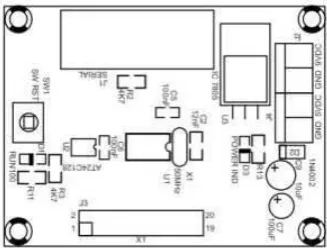
Gambar II.2 BS2SX
DT-BASIC Micro Systemmerupakan modulsingle chip mikrokontrolerBASIC
Stamp® BS2SX(PBASIC2SX-28/SS) dengan kemampuan komunikasi serial
UART serta Serial Downloading.DT-BASIC Micro Systemmemiliki RAM
sebesar 32 byte ( 6 I/O, 26 variabel ) denganScratch Padsebesar 63 byte.
Spesifikasi :
EEPROM 8 x 2 Kbyte yang mampu menampung instruksi hingga 4.000
buah
Memiliki kecepatan prosesor 50 MHz untuk eksekusi program hingga
10.000 instruksi per detik
Memiliki 16 pin jalur input/output
Tersedia jalur komunikasi serial UART RS-232 dengan konektor DB9
Dilengkapi LED indikator pemrograman
10
Gambar II.3 Struktur komponen
Gambar II.4 Alokasi pin
11
2.3 Motor Servo
Motor servo adalah motor yang mampu bekerja 2 arah (CW&CCW)
dimana arah dan sudut pergerakkan rotornya dapat dikendalikan hanya dengan
memberikan pengaturanduty cyclesinyal PWM pada bagian pin kontrolnya. Pada
dasarnya motor servo tersusun dari motor DC, rangkaian control, gearbox dan
potensiometer. Torsi motor servo kuat karena memilikiinternal gear.
Jenis motor servo:
1. Standar 180⁰(CW&CCW).
2. Continuos (CW&CCW)/tanpa batasan deflesi sudut putar.
Gambar II.6 Motor Servo
12
Pengakses motor servo tipe standard adalah dengan cara memberikan
pulsahighselama 1,5 ms dan mengulangnya setiap 20 ms, maka posisi servo akan
berada ditengah atau netral (0°). Untuk pulsa 1 ms maka akan bergerak
berkebalikan arah jarum jam dengan sudut -90°. Dan pulsa high selama 2 ms
akan bergerak searah jarum jam sebesar 90°. Untuk lebih jelasnya perhatikan
gambar berikut.
Sedangkan untuk servo motor tipe continuous untuk berputar (rotasi)
searah jarum jam harus diberi pulsa high selama 1,3 ms. Sedangkan untuk
berputar berlawanan arah jarum jam harus diberi logika highselama 1,7 ms. Jika
motor servocontinousdiberi pulsahighselama 1,5 ms maka akan berhenti.
2.4 Sel Surya
Sebuah sel surya/solar celladalah sebuah alat yang mengubah energi sinar
matahari langsung menjadi listrik oleh efek fotovoltaik. Dari modul tersebut
energi listrik yang berupa arus 12VDC bisa langsung digunakan atau digunakan
sistem penyimpanan dengan baterai/accu sehingga diwaktu malam bisa
digunakan. Modulsolar cellterdiri dari 2 jenis antara lain tipepolycrystallinedan
monocrystalline, semua tipe-tipe tersebut memiliki satuan daya yang disebut
13
Gambar II.8Solar cell
Solar cell berjenis polycrystalline merupakan solar cell yang memiliki
susunan kristal acak. Tipe polycrystallinememerlukan luas permukaan yang lebih
besar dibandingkan dengan jenismonocrystallineuntuk menghasilkan daya listrik
yang sama akan tetapi polycrystalline dapat menghasilkan listrik pada saat
mendung.
2.5 Accumulator
Accumulator merupakan alat yang digunakan sebagai penampung dari
energi yang dihasilkan dari solar sel. Accumulator atau yang sering disebut aki,
mampu mengubah tenaga kimia menjadi tenaga listrik. Dikenal dua jenis elemen
yang merupakan sumber arus searah (DC) dari proses kimiawi, yaitu elemen
primer dan elemen sekunder.
Elemen primer terdiri dari elemen basah dan elemen kering. Reaksi pada
elemen yang menyebabkan electron mengalir dari elektroda negatif (katoda) ke
elektroda positif (anoda). Jika muatan habis, maka elemen primer dapat dimuati
kembali dan memerlukan penggantian bahan pereaksinya (elemen kering).
Sehingga dapat dikatakan elemen primer cukup boros, contohnya baterai (dry
14
Elemen sekunder dalam pemakaiannya harus diberi muatan terlebih
dahulu sebelum digunakan, yaitu dengan cara mngelirkan arus listrik. Elemen
sekunder dapat dimuati kembali berulang kali. Elemen sekunder ini lebih dikenal
dengan nama aki. Dalam sebuah aki berlangsung proses elektrokimia yang
reversible (bolak-balik) dengan efisiensi yang tinggi. Yang dimaksud dengan
proses elektrokimia reversibel yaitu di dalam aki saat dipakai berlangsung proses
pengubahan kimia menjadi tenaga listrik (discharging). Sedangkan saat diisi atau
dimuati, terjadi proses tenaga listrik menjadi tenaga kimia (charging)
Gambar II.9Accumulator
2.6 ADC (Analog to Digital Converter)
ADC (Analog to Digital Converter) digunakan untuk mengubah keluaran
sensor yang masih berupa analog menjadi besaran digital. Resolusi pada ADC
merupakan ketelitian nilai hasil konversi, ADC 8 bit akan memiliki output 8 bit
data digital, ini berarti sinyal input dapat dinyatakan dalam 255 (2n -1) nilai
diskrit. Karena prinsip kerja ADC adalah mengkonversi sinyal analog ke dalam
bentuk besaran yang merupakan rasio perbandingan sinyal input dan tegangan
referensi. Sebagai contoh, bila tegangan referensi 5 volt, tegangan input 3 volt,
rasio input terhadap referensi adalah 60%. Jadi, jika menggunakan ADC 8 bit
dengan skala maksimum 255, akan didapatkan sinyal digital sebesar 60% x 255 =
153 (bentuk desimal) atau 10011001 (bentuk biner).
ADC yang digunakan adalah ADC0832, ADC ini merupakan sebuah ADC
15
ADC ini memiliki resolusi sampai dengan 8 bit dengan 2 channel analog
multiplaxer, dapat bekerja dengansupplytegangan sebesar 0-5 Volt.
Gambar II.10 (kiri) konfigurasi pin ADC (ADC0832), (kanan) komponen fisik
Spesifikasi dari ADC 0832 adalah:
1. Mempunyai lebar data 8bitdengan dua buah kanalanalogyangdimultipleks.
2. Errorberkisar antara ± ½ LSB sampai dengan ± 1 LSB.
3. Beroperasi pada tengangan 5 volt dengan menggunakan daya 15mW.
4. Waktu konversi yang di butuhkan untuk melakukan satu kali siklus konversi
adalah 32µs
2.7 Sensor Inframerah
Infrared merupakan sebuah sensor yang masuk dalam kategori sensor
optik. Secara umum seluruhinfrareddi dunia bekerja optimal pada frekuensi 38.5
KHz. Kurva karakterisitikinfraredmembandingkan antara frekuensi dengan jarak
yang dicapainya. Jika frekuensi di bawah puncak kurva atau lebih dari puncak
16
➱ ✃ ❐ ❒❐ ❮
❰ ÏÐÑ ÒÓ❒Ô Õ❒Ô ❰❒Ö❒Ô
×ØÙ ØÚ ÛÜÚ ØÝÜ ÞÞßà Üá Ùâ ãØäå Øæ çØà ÜàÚßá áß Þ ØäÜà Øà Üà ßÝÚ Øè ØÝ Ø ÞßÝ é Øà Üà Úßá
ß ãß ÞÚÝê äÜ ÞØ Ý ê åêÚ Ú Øåß ãØ Úß ãØæ ÛÜ ãØÞà ØäØÞ Øä ÛØä à â Û Øæ ÛÜâéÜ ÙßÝà â åà Üà Úßá
à ß åØë ØÜá Øä Ø Úß ãØæ ÛÜ Ù ØÙ ØÝ ÞØä ÛÜØÚ Øà ì à Üà Úßá í Øäë ÚÜ ÛØÞ ÚßÝâ éÜ Ûß äëØä åß ä ØÝ ÛÜ
ãØÙ ØäëØä ØÛ ØãØæ ÞêäÚÝ ê ã ÙßáØÞØÜ Øä î ïïð ñð òî óôõ Û Øä Ùß äëÜàÜ Øä î ïïðñðòîóôõ,
ÛÜá Øä Ø à Üà Úßá æØäí Ø ÚßÝ âéÜ åß äØÝ Ù ØÛØ à ØØÚ î ïïðñð òî óôõ ÛÜâ å Øæ á ß äé ØÛÜ öô÷ øõ
ùðö öòúì ØÝâ à í Øäë ØÛØ ÙØÛ Ø î ïïð ñð òî óôõ Úß ãØæ æ ØåÜà ÛØæ â ãâ à ß åß ãâá ÛßÚß ÞàÜ
Ùß äë âÝØäë Øä Úß ë Øäë Øä æ Ü äë ë Ø äÜ ãØÜ ÚßÝÚß äÚâì à ßæÜ äëë Ø à ß åß ãâ á Ùß äë ßèß ÞØä
î ïïð ñð òî óôõ êãßæáÜ ÞÝêÞêäÚÝêãßÝ à ÜàÚßáà âÛØæ ÚÜ Û ØÞá ØáÙâ ØÞÚÜû Þ ØÝß äØ ØÝâ à äí Ø
í Øäë æØåÜà ü ýÜàÚßá Ùß äë ë ØãÜ ãâåØäë Úß ãØæ ÛÜâ éÜ Ù ØÛØ ãØæ Øä ãßá åß Þì Û Øä Úß ãØæ
åßÝûâäë àÜ à ß å Øë ØÜáØäØ áßà ÚÜ äí Øü ýÜà Úßá ÛßÚß ÞÛÜ ÞßÚßÝà ß ÛÜ ØØä åß äÜæ Ûß äëØä
Ü ä ÛÜ Þ ØÚêÝ ãØáÙâ þÿ× à â Û Øæ åßÝûâäëà Ü å ØÜ Þü ýÜà Úßá Ùß äØåâÝØä åß äÜæ Û Øä Ûß åâ
à â Û Øæ åß ÞßÝéØ å ØÜ Þì ä Øá â ä æØÝâ à ÛÜ ãØÞâÞØä äí Ø Ùß äëßá å Øäë Øä Ûßà ØÜ ä Þ ØÚâ Ù
Þß ãâ ØÝ Øä ìÛ ØäÙß äßá Ù ØÚ Øäà ß äà ê ÝÛßÚß Þà Üé ØÚâæåß äÜæ ü
ýß ãØäéâÚ äí Ø à ÜàÚßá áß Þ ØÚÝêäÜ Þ á ß ÞØäÜ Þ ß ãß ÞÚÝêäÜ Þ Ø✁ Ýê Ú ØåßãØ ØÞØä
ÛÜÜ äÚßëÝØàÜ Þ Øä Ûß äë Øä à Üà Úßá Þß ä ÛØãÜü ✂ß äÜæ í Øäë Úß ãØæ ÛÜâ éÜ Þß Û ØãØá à Üà Úßá
ØÛ ØãØæåß äÜæ Ù ØÛÜ ìÞØèØäëÞß Ûß ãØÜÛ ØäÞØè ØäëæÜé Øâ ü
ý ØÝ ØäÙß äë ßá å Øäë Øä✄
☎ü ✆ßáÜ ãÜæØä é ØÝ ØÞ Ú ØäØá Û ØÙØÚ ÛÜ ãØÞâÞØä à ßè ØÝØê ÚêáØÚÜà ì ÛØãØá ÙßÝ Øäè ØäëØä
Ü äÜÙßáÜ ãÜæØäé ØÝ ØÞÚ ØäØáà ßè ØÝ Øá Øäâ Øã ✝✞ôï✝✟ô÷ ✞ ✁
✠ü ýß äà êÝ Ü äûÝ ØáßÝØæ Ùß ä ÛßÚß Þà Ü é ØÚâæäí Ø åß äÜæ ÛÜÚßáÙØÚ Þ Øä Úß Ù ØÚ ÛÜå ØçØæ
ãâ å Øäë Þß ãâØÝåß äÜæ
✡ü ☛ØÚâ Ù ØÚ Øâ ãâ å Øäë é ØÚâæäí Øåß äÜæ æ ØÝ âà ÛÜ ÙßÝ ãß å ØÝ ØÚ Øâ ÛÜ ÙßÝ åßà ØÝ ì àßæ Ü äëë Ø
☞✌
✍✎ ✏✑✒✑✓ ✔✕✔✖ ✗ ✑✘ ✙✚ ✓ ✑✖ ✔✛✜ ✘ ✔✖ ✛✑✖ ✢✣ ✤ ✢✓ ✑✘ ✥✔✦ ✛✔✕ ✗ ✑ ✣ ✢✖ ✧ ✧✔ ✛✑✖ ✢✣ ★✔✖✧ ✩✑ ✥✜✔✘
✕✑✘ ✔✕✜✘ ✪✫ ✓ ✑✘ ✧✑✘ ✔✩ ✩✔✖ ✩✑✒ ✢✥ ✗✑✘✙✚ ✤✔✓ ✔✕ ✦✑✖✧✑ ✥✜✔✘ ✩✔✖ ✫ ✛✑✖ ✢✣✬ ✭ ✗ ✑ ✣✢✖✧✧ ✔
✛✑✖✢✣★✔✖✧✩✑ ✥✜ ✔✘✤✔✓ ✔✕✤✢✕✑✖ ✕✜✩✔✖✗ ✑✗✜✔✢✩✑ ✢✖ ✧ ✢✖ ✔✖✗ ✑✒ ✔✘✔✕✑✓✔✕✪✦✑✖✧✜✘✔✖ ✧ ✢
✑✘✘✚ ✘✬
1
✸✹✺ ✻✼ ✽ ✻✼GAN MEKATRONIKA (MEKANIK ELEKTRONIKA) ROBOT TANAM BENIH LANGSUNG
Agus Mulyana1, Fauzan Muhammad Iqbal2 12
tahun ke tahun teknologi pertanian khususnya tabela tidak mengalami peningkatan. Hal tersebut menjadi fokus utama dalam pengembangan tabela. Dengan mengaplikasikan sistem
robotika maka diharapkan dapat mengembangkan teknologi pertanian yang
pengembangannya terkesan datar-datar saja. Tabela konvensional yang telah ada saat ini hasil tanamnya kurang optimal, diantaranya tata letak benih yang tidak teratur, sehingga pertumbuhan kurang optimal. Sehingga dibutuhkan alat yang mampu mengatasi masalah tersebut. Dalam pengembangannya, sistem rotabela (robot tanam benih langsung) memanfaatkan mikrokontroler basic stamp BS2P dan BS2 sebagai pemroses, sistem mekatronik (mekanik elektronik) dan pemanfaatan solar panel sebagai sumber tegangan utama.
Kata kunci : teknologi pertanian, tabela, robotika
1. PENDAHULAUN
Komuditas padi memiliki arti strategis
dan menjadi prioritas utama dalam
pengembangan pertanian, namun teknologi pertanian cenderung tidak mengalami
perkembangan. Sitem tanam benih
langsung contohnya, sistem tanam ini mampu mempercepat pertumbuhan padi namun alat yang telah ada hingga saat ini masih memiliki kelemahan, diantaranya jumlah benih dalam setiap titik tanam tidak menentu bahkan berserakan tidak teratur yang menyebabkan pertumbuhan padi tidak optimal.
Jarak tanam sistem tabela pada umumnya 30x30 cm, 25x25 cm atau 15x15 cm.
Perkembangan tabela konvensional memanfaatkan sistem mekanik, elektronik dengan basis alat berupa sistem robotika. Tenaga utama dalam pengoperasian robot tanam benih langsung (rotabela) berasal dari sistem panel surya yang kemudian akan disimpan dalamaccumulator.
Sistem terbarukan teknologi pertanian tabela (Tanam Benih Langsung) berbasis mikrokontroler (robotika), mampu bekerja otomatis tanpa operator, mendaya-gunakan tenaga alternatif sel surya sebagai tenaga ramah lingkungan. Diharapkan mampu
mengontrol benih yang tertanam tiap
lubangnya dalam hal ini = 1 buah benih sehingga pertumbuhan padi teratur dan pemakaian benih akan lebih efisien. Dapat mengubah jarak tanam sesuai keinginan antara (20 cm x 20 cm atau 25 cm x 25 cm atau 30 cm x 30 cm).
Fungsi utama robot difokuskan dalam tanam benih padi, kacang hijau dan kacang kedelai.
2. PERANCANGAN
Rancangan sistem meliputi desain 3
dimensi, perancangan hardware atau
perangkat keras serta software atau
perangkat lunak.
◗gus ❘❙ ❚❯ ❚❱ul Fauzan Muhammad Iqbal
2
Adapun perancangan perangkat lunak yang dirancang merupakan pemrograman bahasa basic yang akan ditanamkan dalam sebuah chip mikrokontroler❲❳ ❨ ❩❬ st❳ ❭p ❪ ❫
dan ❲❳ ❨ ❩❬ st❳❭p❪ berjumlah
masing-masing 3 buah dan 1 buah.
Berikut perancangan perangkat lunak persub sistem:
Gambar 1. Flowchart Indikator persediaan benih
Sensor inframerah akan ditempatkan pada tabung penyimpan benih. Penempatan sensor berada di kondisi terendah sehingga jika telah melalui batas tersebut dapat diindikasikan bahwa persediaan benih hanya sedikit bahkan sudah habis. Jika persediaan benih terdeteksi menipis atau habis maka robot akan memberitahu
melalui komponen indikator seperti
nyalanya LED atau buzzer.
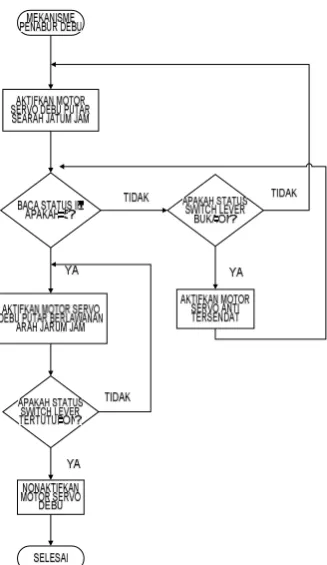
Gambar 2.Flowchart mekanik penabur benih
Penanaman atau penaburan benih memanfaatkan sistem mekanik yang terdiri dari gear motor, motor servo, katup penaburan benih, sw❩t❬❴ ❵❛❛vr dan sensor
inframerah.
Sensor inframerah ditempatkan
❜er❝❞ ❡❝❞ ❢ ❝❞❣❤✐ ❝❥r❦❞ ❧ ✐ ❝(❣❤✐ ❝❞ ❧ ✐❤♠❤ ✐tr❦❞ ❧✐ ❝) r❦♥ ❦❥ t❝❞ ❝❣ benih langsung
3
penaburan benih, sehingga benih akan jatuh dan melewati sensor. Sensor inframerah akan mendeteksi jatuhnya benih, bahkan dapat menghitung berapa banyak benih yang jatuh atau terdeteksi sensor, sehingga
dapat dimanfaatkan untuk pengaturan
jumlah benih yang diinginkan dalam 1
lubang. Katup penaburan benih akan
tertutup jika jumlah benih yang diinginkan
sudah memenuhi. Status katup benih
ditentukan olehsw♦t♣qrssvr apakah terbuka
atau tertutup maksimal atau terbuka
maksimal. Jika keadaan katup benih berada pada posisi terbuka maksimal dan jumlah benih yang diinginkan tidak tercapai dalam
jangka waktu tertentu maka dapat
diindikasikan benih macet atau tertahan. Sehingga, diperlukan mekanik yang dapat mengatasi hal tersebut. Dalam hal ini pada setiap tabung benih ditempatkan motor servo pengaduk benih sehingga diharapkan dapat mendorong benih jatuh.
Gambar 3. Flowchart penaburan benih atau tanah kering
Agar benih tidak hanyut atau
meminimalisasikan benih untuk tidak dimakan burung dan sejenisnya, maka disediakan mekanisme penguburan benih
dengan debu atau tanah kering. Melalui pembacaan status ♦sw♣qt ON/OFF sebagai
pengaktif mekanismenya. Jika switch
berstatus ON maka mekanisme penaburan debu atau tanah kering akan aktif sebaliknya jika statusnya OFF maka sistemnya tidak akan digunakan.
Gambar 4. Flowchart penggali lubang
Sebelum benih ditanamkan atau
ditabur ada mekanisme penggalian lubang dilahan tanam. Dengan memanfaatkan sistem mekanik berupa gear motor yang
tegak lurus, motor servo sebagai
penggerak, dan switch lever sebagai sensor atau penentu seberapa dalam lubang yang akan dibentuk.
Berikut adalah perancangan sistem
supply tegangan yang berasal dari panel
tgus ✉✈ ✇① ✇②ul Fauzan Muhammad Iqbal
digunakan, dan yang kedua adalah
menentukan ③ ④④⑤⑥ ⑤⑦③ ⑧⑨r mana yang akan
diisi (④❶③⑩❷❸). Dengan memanfaatkan ADC
sebagai perangkat yang akan
menghubungkan tegangan accumulator ke
mikrokontroler, sehingga dapat dibaca oleh mikrokontroler.
Gambar 5. Struktur sistem pengaktif accumulator
Jika status relay aktif atau pin
pengaktif relay pemakaian accu dari pin mikrokontroler diberi LOW maka relay
akan memilih VCC accu 1 yang akan aktif
dan menjadikannya sebagai sumber
tegangan bagi seluruh sistem. Namun
sebaliknya jika diberi status HIGH maka VCCaccu2 yang akan aktif.
Gambar 6. Struktur sistem pengisian accumulator
Berikut rangkaian pengaktif relay:
VCC
Pin pengaktif
dari mikrokontroler OUT ke pin
pengaktif
GND
Jika pin pengaktif relay charge accu
diberi status LOW maka relay akan aktif dan yang terhubung pada relay tersebut akan aktif atauaccumulatorakan aktif.
Gambar 7. Flowchart sistem supply tegangan
3. PENGUJIAN DAN ANALISA
❹er❺❻ ❼❺❻ ❽ ❺❻❾❿➀ ❺➁r➂❻ ➃ ➀ ❺(❾❿➀ ❺❻ ➃ ➀❿➄❿ ➀tr➂❻ ➃➀ ❺) r➂➅ ➂➁ t❺❻ ❺❾ benih langsung perputaran (m). Sehingga dapat ditentukan torsi yang dikeluarkan motor dengan baban 18 kg adalah: diketahui kecepatan motor dengan beban 18 kg adalah 0,1 ms (setiap 10 cm motor dapat mengangkat beban sebasar 18 kg dalam waktu ± 1 detik, sehingga 100 meter mampu ditempuh selama 10 detik maka besar kecepatannya 10 detik/100 cm atau = 0,1 m/s)
Sehingga dibutuhkan 1 buah motor dengan RPM = 12 dan torsi = 1,646 Nm, dengan menambahkan 25% untuk faktor yang tidak terduga (error) maka RPM yang dibutuhkan adalah 15 dengan torsi sebesar 3,3075 Nm. Dikarenakan menggunakan 2 buah motor maka dibutuhkan motor dengan torsi masing-masing motor adalah 3,3075/2, yaitu 1,65375 Nm
3.2 Mekanik penggali
Mekanik penggali membutuhkan ± 5 detik (kanan-kiri) untuk melakukan penggalian
dalam 1 siklus penanaman dengan
kedalaman lubang ± 1,5 cm.
3.3 Mekanik penabur benih dan debu
Mekanisme penaburan benih padi
sebelah kanan dengan lubang katup ± 1 cm, diameter pipa penaburan benih ± 3
cm dengan jumlah benih yang
dimasukkan kedalam tabung
penyimpanan = 40 buah benih berhasil terdeteksi jatuh ke areal penanaman sebanyak 30 buah benih. 5 buah benih
tertahan di lempengan sensor
inframerah, 5 buah sisanya terdapat di ruang kosong katup(rongga antara pipa penyimpanan dan pengeluaran benih).
Mekanisme penaburan benih padi
sebelah kiri dengan lubang katup ± 1 cm, diameter pipa penaburan benih ± 3
cm dengan jumlah benih yang
dimasukkan kedalam tabung
penyimpanan = 40 buah benih berhasil terdeteksi jatuh ke areal penanaman sebanyak 31 buah benih. 1 buah benih
tertahan di lempengan sensor
inframerah, 8 buah sisanya terdapat di ruang kosong katup (rongga antara pipa penyimpanan dan pengeluaran benih).
Mekanisme penaburan benih kacang
➆gus ➇➈ ➉➊ ➉➋ul Fauzan Muhammad Iqbal
6
sebanyak 36 buah benih. 1 buah benih
tertahan di lempengan sensor
inframerah, 3 buah sisanya terdapat di ruang kosong katup(rongga antara pipa penyimpanan dan pengeluaran benih).
Mekanisme penaburan benih kacang
hijau sebelah kiri dengan lubang katup ± 1 cm, diameter pipa penaburan benih ± 3 cm dengan jumlah benih yang
dimasukkan kedalam tabung
penyimpanan = 40 buah benih berhasil terdeteksi jatuh ke areal penanaman sebanyak 16 buah benih. 2 buah benih
tertahan di lempengan sensor
inframerah, 22 buah sisanya terdapat di ruang kosong katup (rongga antara pipa penyimpanan dan pengeluaran benih).
Mekanisme penaburan benih kacang
kedelai sebelah kanan dengan lubang katup ± 1 cm, diameter pipa penaburan benih ± 3 cm dengan jumlah benih yang dimasukkan kedalam tabung penyimpanan = 40 buah benih berhasil terdeteksi jatuh ke areal penanaman sebanyak 35 buah benih. 5 buah benih masih terdapat di pipa penyimpanan benih.
Mekanisme penaburan benih kacang
kedelai sebelah kiri dengan lubang katup ± 1 cm, diameter pipa penaburan benih ± 3 cm dengan jumlah benih yang dimasukkan kedalam tabung penyimpanan = 40 buah benih berhasil terdeteksi jatuh ke areal penanaman sebanyak 39 buah benih. 1 buah sisanya terdapat di ruang kosong katup (rongga antara pipa penyimpanan dan pengeluaran benih).
3.4 Sistem deteksi ketersediaan benih
Pengujian sistem dilakukan dengan
menutup sela diantara pengirim dan penerima, dimana jika terdapat penghalang
diantaranya maka keluaran sensor
menghasilkan logika HIGH, sebaliknya jika tidak ada penghalang atau dalam hal ini adalah benih maka logika keluarannya
menjadi LOW yang selanjutnya
dihubungkan kedalam rangkaian indikator LED aktif LOW sehingga LED akan nyala apabila benih tidak menutupi sensor, yang dengan kata lain diindikasikan persediaan benih dalam tabung penyimpanan habis.
3.5 Sistem➌ ➍➎➎ ➏ytegangan
ADC accumulator 1 dan ADC accumulator 2 masing-masing 255, sehingga supply tegangan berasal dari accumulator 1, maka: Arus dengan diberi beban (resistor) 32 KOhm = 11 V/ 32KOhm = 0,343 mA, Arus tidak mencukupi kebutuhan pengaktifan sistem dengan besar pemakaian arus ± 3 A (terukur di power supply).
3.6 Analisa lama kerja
13 detik/meter * 100 meter = 1300 detik/100 meter = 1300/60 = 21,7 menit/100 meter. Sehingga robot akan menghabiskan waktu dalam kondisi terbaik (ideal) = 21,7 menit untuk menanami lahan tanam sepanjang 100m.
Berdasarkan pengujian analisa lama kerja lapangan dapat ditaksir, antara lain:
Analisa lama kerja dengan benih padi
berdasarkan data pengujian (berhasil
mengeluarkan benih):
Jarak lahan tanam = 100 meter, lama kerja = 2,9 jam/100 meter
Analisa lama kerja dengan kacang hijau berdasarkan data pengujian (berhasil mengeluarkan benih):
Jarak lahan tanam = 100 meter, lama kerja = 2,5 jam/100 meter
Analisa lama kerja dengan kacang
kedelai berdasarkan data pengujian
(berhasil mengeluarkan benih):
➐er➑➒ ➓➑➒ ➔ ➑➒→➣↔ ➑↕r➙➒ ➛ ↔ ➑(→➣↔ ➑➒ ➛ ↔➣➜➣ ↔tr➙➒ ➛↔ ➑) r➙➝ ➙↕ t➑➒ ➑→ benih langsung
7
4. SIMPULAN DAN SARAN
Dapat ditarik kesimpulan bahwa sistem
mekanisasi serta cara kerja sistem
elektronika robot tabela telah dilaksanakan dan sudah diuji persubsistem sebagaimana telah dipaparkan diatas, sistem yang tidak teruji dengan benar di lapangan adalah
kontrol pemakaian accumulator dan
pengisian accumulator, dimana sistem hanya teruji benar pada saat accumulator diubah menjadi power supply, arus yang ada pada accumulator telah habis dahulu sebelum deteksi pengurangan tegangan hingga nilai tertentu, sehingga sebelum
pengecekan accumulator oleh
mikrokontroler sistem sudah tidak mampu aktif karena arusnya yang habis.
Selanjutnya sistem mekatronik (mekanik elektronik) rotabela akan diintegrasikan dengan sistem kendali. Benih yang telah diuji kedalam sistem adalah benih padi, kacang kedelai dan kacang hijau.
Bebarapa saran yang bisa penulis sarankan untuk pengembangan rotabela (robot tanam benih langsung):
1. Pemilihan jarak tanam dapat dilakukan secara otomatis, dalam perancangan ini pemilihan jarak tanam secara manual (knock down)
2. Sensor inframerah pendeteksi jatuhnya
benih ditempatkan tepat dibawah lubang keluar benih
3. Katup atau lubang jatuhnya benih
harus diperlebar atau diperbesar, sehingga diharapkan mengurangi resiko benih macet atau tersendat
4. Kecepatan servo penaburan benih
diperlambat sehingga benih yang keluar teratur (1 pergerakkan kecil servo dapat mengeluarkan 1 benih), sehingga benih yang keluar dapat ditentukan sesuai keinginan secara tepat (mengurangi error)
5. Terdapat penggati deteksi habisnya
accumulator, misalnya sensor arus
5. DAFTAR PUSTAKA
[1] Dinas pertanian TPH Kabupaten
Grobogan. (2012, 12 19). Sistem Tanam Jajar Legowo. Retrieved 04 24, 2013, from dinpertan.grobogan.go.id:
http://dinpertan.grobogan.go.id/pola-tanam/133-sistem-tanam-jajar-legowo.html
[2] Sudaryo. (2011, 01). Peran dan Manfaat Herbisida pada Budidaya Padi Sistem Tabela. Retrieved 01 10, 2013, from
budidaya padi:
http://budidayapadi- sudaryo.blogspot.com/2011/01/budidaya-padi-sistem-tabela.html
[3] BIBLIOGRAPHY \l 1033 Cahndeso Mbangundeso. (2011, 03). Tanam Benih Padi secata Langsung(TaBeLa). Retrieved
01 10, 2013, from
cahndeso-TEKNOLOGI TABELA. Retrieved 01 10, 2013, from dskemamang.wordpress.com: http://dskemamang.wordpress.com/2009/05 /24/teknologi-tabela/
[5] newInRobotics. (2013, Mei 15). Motor Torque Selection. Retrieved Juli 30, 2013,
from www.society of robots.com:
http://www.societyofrobots.com/robotforu m/index.php?topic=16929.0