RANCANG BANGUN PERANGKAT PRAKTIKUM FISIKA
GERAK LURUS BERUBAH BERATURAN (GLBB)
BERBASIS MIKROKONTROLER
TUGAS AKHIR
Disusun Untuk Memenuhi Syarat Kelulusan Pada Program Studi Diploma Tiga Teknik Komputer
Oleh :
Ditya Prasetia 10809028
Pembimbing :
Hidayat. M.T
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
vii
DAFTAR ISI
LEMBAR JUDUL ... i
LEMBAR PENGESAHAN ... ii
LEMBAR PERNYATAAN ... iii
ABSTRAK ... iv
KATA PENGANTAR ... v
DAFTAR ISI ... vii
DAFTAR TABEL ... x
DAFTAR GAMBAR ... xii
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Rumusan Masalah ... 2
1.3 Maksud dan Tujuan ... 2
1.4 Batasan Masalah ... 2
1.5 Metode Pelaksanaan ... 3
1.6 Sistematik Penulisan ... 3
BAB II LANDASAN TEORI ... 5
2.1 Gerak Lurus ... 5
2.2 Kecepatan ... 6
2.3 Hukum Newton ... 7
2.4 Gerak Lurus Pada bidang Miring ... 8
2.5 Perangkat keras ... 8
2.5.1 Sensor infrared ... 8
2.5.2 USB to TTL CONVERTER ... 9
viii
2.5.4 Relay 12v ... 9
2.5.5 IC ULN 2803 ... 10
2.5.6 Push Botton ... 10
2.5.7 Speed Control ... 11
2.5.8 Mikrokontroler ATMega 8535 ... 11
2.5.9 Deskrifsi Pin I/O ATmega 8535 ... 12
2.5.9.1 Kontruksi Mikrokontroler ATmega 8535 ... 13
2.5.9.2 Bahasa Pemograman pada AVR ATMega 8535 ... 14
2.6 Perangkat Lunak ... 14
2.6.1 Pengenalan Codevision. ... 14
2.6.2 Visual Basic 6.0 ... 15
BAB III PERANCANGAN ... 16
3.1 Prinsip Kerja Alat ... 16
3.2 Perancangan Perangkat Keras... 17
3.2.1 Mikrokontroler ... 17
3.2.2 Alokasi Pin Pada mikrokontroler Atmega8535 ... 18
3.2.3 Driver Relay ... 20
3.2.4 Sensor infrared ... 20
3.2.5 Speed Control ... 21
3.2.6 Perancangan Desain Mekanik ... 21
3.3 Perancangan Perangkat Lunak ... 22
3.3.1 Algoritma Sistem ... 22
3.3.2 Perancangan interface Visual Basic (VB) ... 31
BAB IV PENGUJIAN DAN ANALISA ... 32
ix
4.1.2 Pengujian Sensor Infrared ... 32
4.2 Pengujian komuikasi serial ... 34
4.3 Analisa Perbandingan Secara Manual dan Otomatis ... 35
4.4 Hasil Analisa secara Manual ... 35
4.4.1 Perhitungan secara manual dengan massa 38.82 g ... 35
4.4.2 Perhitungan secara manual dengan massa 28.5 g ... 41
4.1 Hasil Analisa Secara Otomatis ... 46
4.1.1 Pengambilan data dengan massa benda 38.82 g ... 47
4.1.1.1 Pengambilan Data Pada Posisi 300 ... 47
4.1.1.2 Pengambilan Data Pada Posisi 400 ... 48
4.1.1.3 Pengambilan Data Pada Posisi 450 ... 50
4.1.1.4 Pengambilan Data Pada Posisi 500 ... 52
4.1.1.5 Pengambilan Data Pada Posisi 550 ... 53
4.1.1.6 Pengambilan Data Pada Posisi 600 ... 55
4.1.2 Pengambilan data dengan massa benda 28.5 g ... 56
BAB V KESIMPULAN DAN SARAN ... 64
5.1 Kesimpulan ... 64
5.2 Saran ... 64
v
KATA PENGANTAR
Assalamualaikum Wr. Wb.
Puji dan syukur kehadirat Allah SWT, atas karunia serta rahmat-Nya sehingga penulis dapat menyelesaikan tugas akhir ini tepat pada waktunya dengan
judul “Perancangan Perangkat Praktikum Fisika Gerak Lurus Berubah
Beraturan (GLBB) Berbasis Mikrokontroler”. yang merupakan salah satu syarat meraih gelar Diploma Tiga Jurusan Teknik Komputer Fakultas Teknik dan Ilmu Komputer Universitas Komputer Indonesia.
Penulisan Tugas Akhir ini tidak lepas dari dukungan bantuan dan bimbingan berbagai pihak. Dalam kesempatan ini penulis mengucapkan terima kasih dan penghargaan yang sebesar-besarnya kepada :
1. Ayah dan Ibu yang selalu mendoakan, memberikan dorongan serta bantuan baik secara moril maupun materil tanpa ada batasan.
2. Bapak Prof. Dr. H. Denny Kurniadie, Ir, M.Sc selaku Dekan Fakultas Taknik dan Ilmu Komputer Universitas Komputer Indonesia.
3. Bapak Wendi Zarman, M.Si., selaku Ketua Jurusan Teknik Komputer di Universitas Komputer Indonesia.
4. Bapak Agus Mulyana, S.Kom selaku Dosen Wali atas segala dukungannya baik akademik maupun nonakademik.
5. Bapak Hidayat M.T selaku dosen pembimbing yang telah membimbingan dalam pengerjaan tugas askhir ini.
6. Bapak dan Ibu dosen di jurusan Teknik Komputer Universitas Komputer Indonesia, yang telah banyak memberikan ilmu serta motivasi dan bimbingannya, baik secara akademik maupun non akademik.
vi
8. Teman-teman kampus khususnya program studi Teknik Komputer kelas 9 TK 4 yang selalu membantu memberikan solusi untuk masalah-masalah yang penulis hadapi.
9. Teman-teman asisten LAB Sistem Digital terima kasih atas segala bantuannya terutama diskusi dan peminjaman alatnya.
10.Semua pihak yang tidak bisa penulis sebutkan satu persatu, terima kasih atas dukungannya.
Semoga apa yang telah diberikan kepada penulis mendapat balasan dan ridho dari Allah SWT. Akhir kata penulis berharap Makalah ini bermanfaat khususnya bagi penulis dan umumnya bagi para pembaca.
AMIIN YAA ROBBAL AALAMIN
Wassalamualaikum Wr.Wb
Bandung, Agustus 2013
65
DAFTAR PUSTAKA
[1] ATMEL. (n.d.). ATmega8535. Retrieved 01 13, 2013, from www.atmel.com/datasheet/ATmega8535
[2] Bejo, A. (2008). Rahasia Kemudahan Bahasa C dalam Mikrokontroler
ATMega8535. Yogyakarta: Graha Ilmu.
[3] Electronics, I. (2005). Infrared Receiver. Retrieved 01 13, 2013, from www.innovativeelectronics.com pada bagian Support.
[4] Electronics, I. (2005). Infrared Transmitter. Retrieved 01 13, 2013, from www.innovativeelectronics.com pada bagian Support.
[5] Ishaq, U. M. (2007). Fisika Dasar. Bandung: Graha Ilmu.
[6] Mahfud. (2012, 03). Pengertian Fisika . Retrieved 01 13, 2013, from azhie: www.azhie.net
[7] robotShop. (n.d.). DFRobot USB to TTL Converter. Retrieved 01 13, 2013, from http://www.robotshop.com/dfrobot-usb-ttl-convertor.html
[8] Toshiba. (n.d.). ULN2803,04APG/AFWG. Retrieved 01 13, 2013, from www.semicon.toshiba.co.jp/
[9] wardana, l. (2006). Mikrokontroler AVR Seri ATMega8535, Simulasi Hardware dan Aplikasi . yogyakarta: andi.
[10] Winarno, E. (2013). Belajar Pemograman VB6 dalam sekejap. jakarta: Elex Media Komputindo.
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Fisika adalah sains atau ilmu tentang alam dalam makna yang terluas yang mempelajari gejala alam yang tidak hidup atau materi dalam lingkup ruang dan waktu sehingga para fisikawan atau ahli fisika mempelajari perilaku dan sifat materi dalam bidang yang sangat beragam. [6]
Gerak Lurus Berubah Beraturan (GLBB) termasuk dalam ilmu fisika juga dimana dalam GLBB mempelajari gerak suatu benda yang akan mengetahui besaran kecepatan dan percepatan, dimana selama ini untuk pengukuran kecepatan dan percepatan gerak suatu benda masih secara manual yang mengakibatkan dalam perhitungannya masih tedapat kesalahan terutama dalam pencatatan waktu menggunakan stopwatch masih kurang akurat, oleh karena itu untuk mempelajari GLBB tentunya harus ada simulator alat yang dapat mengukur kecepatan dan percepatan gerak suatu benda secara otomatis agar meminimalisir kesalahan dalam pengukuran.
Dalam hal ini penulis berupaya membuat simulator GLBB berbasis mikrokontroler yang akan mempermudah pelajar dalam mempelajari GLBB sehingga dalam pengukuran didapat hasil yang akurat.
2
1.2 Rumusan Masalah
Adapun beberapa perumusan masalah yang akan dipecahkan diantaranya: a. Bagaimana merancang alat simulator GLBB?
b. Bagaimana pemanfaatan sensor sebagai pendeteksi benda ? c. Bagaimana keluaran sensor dapat di terima oleh mikrokontroler ? d. Bagaimana mikrokontroler dapat menghubungkan pada komputer ? e. Bagaimana mengukur kecepatan dan percepatan secara otomatis ? f. Bagaimana membuat kemiringan secara otomatis ?
1.3 Maksud dan Tujuan
Maksud dari perancangan alat ini diharapkan dapat menghasilkan suatu sistem pengukuran kecepatan dan percepatan dari benda bergerak lurus berubah beraturan secara akurat.
Adapun tujuannya yaitu untuk mempermudah pelajar dalam mengukur kecepatan dan percepatan gerak suatu benda dan juga dapat bermanfaat bagi kelengkapan dan pengembangan laboratorium fisika.
1.4 Batasan Masalah
Pada perancangan alat yang akan dibuat ini terdapat beberapa batasan masalah yaitu:
a. Pembahasan gerak lurus hanya pada GLBB. b. Jumlah sensor yang digunakan 6 sensor. c. Setiap sensor berjarak 10 cm.
d. Sensor pendeteksi keberadaan benda menggunakan infrared. e. Mikrokontroler yang digunakan yaitu Atmega 8535.
3
1.5 Metode Pelaksanaan
Metode pelaksanaan yang digunakan dalam pembuatan tugas akhir ini adalah:
a. Studi Pustaka
Merupakan metode pengumpulan data yang dilakukan dengan cara mencari referensi melalui internet, reading e-book dan mempelajari buku-buku yang berhubungan dengan masalah yang menjadi topik tugas akhir.
b. Interview
Bertanya kepada pihak-pihak yang dapat memberikan informasi yang dibutuhkan dengan cara melakukan bimbingan dengan dosen pembimbing dan berdiskusi dengan sesama mahasiswa.
c. Eksperimental
Eksperimental yaitu melakukan perancangan dan pembuatan rangkaian alat secara langsung.
d. Pengujian
Pengujian dan analisis merupakan metode untuk mengetahui hasil dari perancangan sistem yang telah dibuat apakah sudah berhasil sesuai dengan yang direncanakan atau belum, selanjutnya akan dilakukan pengujian secara teoritis maupun praktis, jika terdapat kekurangan maka akan dilakukan beberapa perbaikan sehingga pada akhirnya dapat diperoleh suatu kesimpulan dari hasil penelitian.
1.6 Sistematik Penulisan
Sistematika penulisan tugas akhir ini sebagai berikut: BAB I. PENDAHULUAN
Bab ini meliputi latar belakang, rumusan masalah, maksud dan tujuan alat yang akan dibuat, batasan masalah, metodologi
4
BAB II. LANDASAN TEORI
Bab ini berisi tentang dasar teori yang meliputi : Gerak Lurus, Gerak Lurus Berubah Beraturan, kecepatan dan percepatan, sensor
infrared, mikrokontroler ATmega8535, motor power window, driver relay.
BAB III. PERANCANGAN
Bab ini akan memaparkan rancangan yang akan dikerjakan dalam pengerjaan tugas akhir yang memuat blok sistem dan algoritma. BAB IV. PENGUJIAN
Bab ini berisi tentang data hasil pengujian dan rangkaian keseluruhan.
BAB V. SIMPULAN DAN SARAN
Bab ini akan menyampaikan simpulan dan saran dengan merujuk pada hasil penelitian yang sudah dilakukan, juga merujuk pada tujuan penelitian, apakah tujuan penelitian sudah tercapai atau belum, serta memberikan saran untuk mengembangkan penelitian yang telah dilakukan berdasarkan kelemahan dan keterbatasan dalam penelitian untuk mendapatkan hasil yang baik.
64
BAB V
KESIMPULAN DAN SARAN
1.1 Kesimpulan
Dari hasil penelitian dan analisa dapat disimpulkan sebagai berikut: a. Perancangan alat simulator GLBB telah selesai dibuat.
b. Dari hasil perhitungan secara otomatis dan manual dapat dibandingkan hasil pengukuran dari sudut 300 yaitu dengan percepatan 4.13 m/s2 dan pada sudut 400 dengan percepatan 5.63 m/s2, pada sudut 450 memiliki percepatan 6.36 m/s2, pada sudut 500 didapat percepatan 7.01 m/s2, pada sudut 550 memiliki percepatan 7.62 m/s2 sedangkan pada sudut 600 memiliki percepatan 8.16 m/s2. Pada hasil pengukuran otomatis dan manual didapat hasil percepatan yang sama pada masing-masing sudut walaupun massa yang digunakan berbeda, yang membedakannya yaitu hasil dari kecepatannya ketika massa semakin besar maka kecepatan semakin cepat dibandingkan dengan massa yang lebih kecil.
c. Pengambilan data dilakukan sebanyak 5 kali pada masing-masing sudut, hasil dari 5 data tersebut dirata-ratakan hanya 3 data yang sama.
1.2 Saran
Saran untuk penelitian selanjutnya agar lebih baik yaitu :
a. Pengaturan jarak sensor lebih presisi agar data yang didapat lebih akurat. b. Pengaturan sudu lebih presisi agar dalam perhitungannya didapat
ii
DAFTAR RIWAYAT HIDUP PENULIS
Nama lengkap : Ditya Prasetia
Tempat, Tanggal Lahir : Bandung, 19 April 1991
Alamat : Jl. Cijerah Gg.Manunggal IIc RT.7 RW.7
Agama : ISLAM
Fakultas / Program Studi : Teknik dan Ilmu Komputer/Teknik komputer Perguruan Tinggi : Universitas Komputer Indonesia
E-mail : [email protected]
Pendidikan Formal
1997-2003 : SD SAYURAN 1
2003-2006 : SLTP YWKA
2006-2009 : SMK ANGKASA
2009-2013 : Universitas Komputer Indonesia, Bandung
Pengalaman Kerja
RANCANG BANGUN PERANGKAT PRAKTIKUM
FISIKA GERAK LURUS BERUBAH BERATURAN
BERBASIS MIKROKONTROLER
Oleh :
Ditya Prasetya
Pendahuluan
•
pengukuran kecepatan dan percepatan benda masih secara
manual dan masih tedapat kesalahan pada manusia dalam
pengukurannya
terutama
dalam
pencatatan
waktu
menggunakan
stopwatch.
•
Merancang alat yang dapat meminimalisir kesalahan dalam
Maksud dan Tujuan
•
Pembuatan alat simulasi ini diharapkan dapat menghasilkan suatu
system
pengukuran kecepatan dan percepatan dari benda bergerak
lurus berubah beraturan secara akurat.
•
Mempermudah pelajar dalam mengukur kecepatan dan percepatan
suatu benda.
•
Alat ini diharapkan dapat bermanfaat bagi kelengkapan dan
Batasan Masalah
•
Pembahasan gerak lurus hanya pada Gerak Lurus Berubah Beraturan
(GLBB).
•
Jumlah sensor yang digunakan 6 sensor.
•
Setiap sensor berjarak 10cm.
•
Pengukuran untuk massa benda tidak dimasukan pada rumus
Perangkat Lunak
•
CodeVision
Diagram blok
Benda Sensor Infrared 1 Mikrokontroler
Atmega 8535 Usb To TTL Komputer (software Visual
Basic)
Motor Power Windows Driver Relay Sensor Infrared2
Sensor Infrared 3
Sensor Infrared 4
Sensor Infrared 5
Sensor Infrared 6
a b
c
d
e
f
g
h i
j
k
[image:25.720.234.564.76.450.2]L
Diagram Alir Sensor Infrared
Pada Mikrokontroler
Diagram Alir Motor Power
[image:27.720.260.566.103.469.2]Windows Pada Mikrokontroler
Diagram Alir Motor Power
Windows Pada VB
Diagram Alir Sensor Infrared
Pada VB
Tampilan VB
Perancangan mekanik
Pengujian Komunikasi serial
[image:32.720.183.560.159.440.2]Pengujian Manual
Pengujian Secara Otomatis
Kesimpulan
•
Kesimpulan
Perancangan alat simulator GLBB telah selesai dibuat.
Dari hasil perhitungan secara otomatis dan manual dapat dibandingkan
hasil pengukuran dari sudut 30
0yaitu dengan percepatan 4.13 m/s
2dan
pada sudut 40
0dengan percepatan 5.63 m/s
2, pada sudut 45
0memiliki
percepatan 6.36 m/s
2, pada sudut 50
0didapat percepatan 7.01 m/s
2, pada
sudut 55
0memiliki percepatan 7.62 m/s
2sedangkan pada sudut 60
0memiliki percepatan
8.16 m/s
2. Pada hasil pengukuran otomatis dan
manual didapat hasil percepatan yang sama pada masing-masing sudut
walaupun massa yang digunakan berbeda, yang membedakannya yaitu
hasil dari kecepatannya ketika massa semakin besar maka kecepatan
semakin cepat dibandingkan dengan massa yang lebih kecil.
1
PERANCANGAN SIMULATOR GERAK LURUS BERUBAH BERATURAN (GLBB) BERBASIS MIKROKONTROLER ATMEGA 8535
Hidayat1, Ditya Prasetia2
1,2,3
Jurusan Teknik Komputer Unikom, Bandung 1
[email protected], [email protected]
ABSTRACK
Gerak Lurus Berubah Beraturan (GLBB) adalah sebuah ilmu fisika yang mempelajari tentang gerak suatu benda yang akan mengetahui besaran kecepatan benda dan percepatan, Dimana selama ini untuk pengukuran kecepatan dan percepatan benda masih secara manual dan masih terdapat kesalahan pada manusia dalam pengukurannya terutama dalam pencatatan waktu menggunakan stopwatch, oleh karna itu untuk mempelajari GLBB tentunya harus ada simulator alat yang dapat mengukur kecepatan, percepatan secara otomatis agar meminimalisir kesalahan dalam pengukuran. Untuk perancangan simulator diperlukan sebuah rangka yang berfungsi sebagai tempat gerak laju suatu benda, sensor infrared yang dapat mendeteksi suatu benda dan mikrokontroler ATmega8535 yang berfungsi menerima keluaran dari sensor dan mengirim kembali pada komputer untuk memprose perhitungan yaitu berupa kecapatan, percepatan dan grafik.
Kata kunci : simulator, ATmega8535, sensor infrared
1. PENDAHULUAN
Fisika adalah sains atau ilmu tentang alam dalam makna yang terluas. Fisika mempelajari gejala alam yang tidak hidup atau materi dalam lingkup ruang dan waktu. Seperti Gerak Lurus Berubah Beraturan (GLBB) termasuk ke dalam ilmu fisika dimana dalam GLBB mempelajari gerak suatu benda yang akan mengetahui besaran kecepatan benda dan percepatan. Dengan mempelajari GLBB dapat mengetahui kecepatan dan percepatan pada sebuah benda, Dimana selama ini untuk pengukuran kecepatan dan percepatan benda masih secara manual dan masih tedapat kesalahan pada manusia dalam pengukurannya terutama dalam pencatatan waktu menggunakan stopwatch, oleh karna itu untuk mempelajari GLBB tentunya harus ada simulator alat yang dapat mengukur kecepatan, percepatan secara otomatis agar meminimalisir kesalahan dalam pengukuran, Simulasi tersebut akan menunjukan perubahan kecepatan benda dan percepatan dimana simulasi ini akan menunjang pembelajaran bagi pelajar.
2. PERANCANGAN
Perancangan yang dilakukan terdiri dari perancangan mekanik, perancangan perangkat keras dan perancangan perangkat lunak.
Perancangan Mekanik
Perancangan rangka GLBB yang dirancang berukuran tinggi 70cm, lebar 70 cm dan bidang
miring berukuran 60 cm. yang ditunjukkan pada Gambar 1.
Gambar 1. Rancangan Rangka simulator GLBB
Perancangan Perangkat Keras
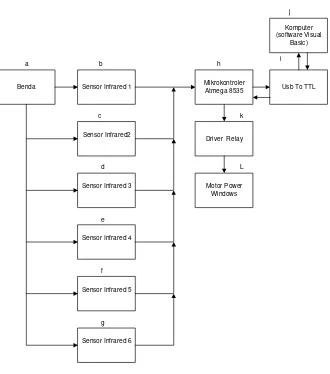
Sistem yang akan dirancang ditunjukkan pada Gambar 2.
Benda Sensor Infrared 1 Mikrokontroler Atmega 8535 Usb To TTL Komputer (software Visual
Basic)
Motor Power Windows Driver Relay Sensor Infrared2
Sensor Infrared 3
Sensor Infrared 4
Sensor Infrared 5
Sensor Infrared 6
[image:37.595.342.498.376.494.2]a b c d e f g h i j k L
[image:37.595.337.503.578.745.2]Hidayat, Ditya Prasetia
2 Dari gambar .3 dapat dijelaskan sebagai berikut:
1. Benda akan melaju dari titik atas bidang miring sampai titik bawah.
2. Sensor 1 -6 berfungsi ketika sensor tertutupi oleh benda maka sensor akan mengeluarkan output pada mikrokontroler. 3. Pada bagian blok Mikrokontroler berfungsi
sebagai penerima output dari sensor. 4. Bagian USB TO TTL berfungsi mengirim
data dari mikrokontroler pada komputer yaitu sebagai komunikasi serial.
5. Bagian software vb yaitu sebagai pengolah data yang telah dikirim oleh USB TO TTL dari mikrokontroler dan juga sebagai pengirim data dari komputer pada mikrokontroler.
6. Blok driver relay berfungsi untuk mengaktifkan motor dan mengatur arah putar sebuah motor.
7. Motor power window digunakan untuk mengatur kemiringan.
Mikrokontroler memuat mikrokontroler ATmega8535 yang berfungsi untuk mengolah data dari sensor infrared dan push button, dan menghubungkan pada komputer.
Sensor Infrared TSAL6200 memuat sensor
[image:38.595.319.529.67.236.2]yang berfungsi untuk mendeteksi keberadaan benda dimana sensor infrared mempunyai 2 bagian receiver dan transmitter[2][3]
Gambar 3. Rangkaian Sensor infrared transmitter.[2]
Gambar 4. Rangkaian Sensor infrared receiver.[3]
Transmitter berfungsi sebagai sensor yang mengeluarkan cahaya infrared dan receiver berfungsi sebagai penerima cahaya infrared
[image:38.595.316.525.290.423.2]Driver relay digunakan sebagai alat utntuk mengaktifkan motor dan mengatur arah putar motor power window.
Gambar 5. Rangkaian driver relay
Motor power window berfungsi sebagai penggerak kemiringan yang dapat menentukan kemiringannya dari 30 derajat sampai 60 derajat.
Perancangan Perangkat Lunak
[image:38.595.78.276.458.590.2]PERANCANGAN SIMULATOR GERAK LURUS BERUBAH BERATURAN (GLBB) BERBASIS MIKROKONTROLER ATMEGA 8535
3 1 3 Mulai 5 Dekalar asi variabel Jika sensor1 bernilai =1 Kirim karakter *A# ya 2 3 4 Jika sensor2 bernilai =1 Kirim karakter *B# Jika sensor3 bernilai =1 Kirim karakter *C# Jika sensor4 bernilai =1 Kirim karakter *D# Jika sensor5 bernilai =1 Kirim karakter *E# Jika sensor6 bernilai =1 Kirim karakter *F# T T T T T Pengiriman data secara serial pada
[image:39.595.149.448.70.621.2]VB ya ya ya ya ya 7 6 8 9 10 11 12 13 14 15 selesai T
Hidayat, Ditya Prasetia
[image:40.595.115.482.67.521.2]4
PERANCANGAN SIMULATOR GERAK LURUS BERUBAH BERATURAN (GLBB) BERBASIS MIKROKONTROLER ATMEGA 8535
5 Mulai Perngirm an data serial dari VB If (*D=30#) If (*D=40#) If (*D=45#) If (*D=50#) If (*D=55#) If (*D=60#) Jalankan motor pada posisi 30
Jalankan motor pada posisi 40 Jalankan motor pada posisi 45 Jalankan motor pada posisi 50
Jalankan motor pada posisi 55
Jalankan motor pada posisi 60
Selesai Driver relay Driver relay Driver relay Driver relay Driver relay Driver relay Mikrokontroler membaca posisi Mikrokontroler membaca posisi Mikrokontroler membaca posisi Mikrokontroler membaca posisi Mikrokontroler membaca posisi Mikrokontroler membaca posisi Scaning data dari Vb 1 2 4
5 6 7
8 9 10 11 12 13 14 15 1 6 17 18 19
20 21 22 23
24
25 26 27
[image:41.595.328.499.67.653.2]28
Gambar 9. Diagram Alir Program Vb Motor Power Window
2
3
Mulai
Cek port Com
Port Com Ready ? Terima data dari POrtCom Apakah data yang diterima karakter *A# Aktifkan timer Apakah data yang diterima karakter *B# Timer1 berhenti dan menyimpan waktu Apakah data yang diterima karakter *c# Timer2 berhenti dan menyimpan waktu Apakah data yang diterima karakter *D# Timer3 berhenti dan menyimpan waktu Apakah data yang diterima karakter *F# Timer4 berhenti dan menyimpan waktu Apakah data yang diterima karakter *F# Timer5 berhenti dan menyimpan waktu Tampilkan hasil dari perhitunag dan menampilkan pada grafik end 1 4 5 6 7 8 9 10 11 12 13 15 16 14 17 18 y T T Y Y T Y T Y
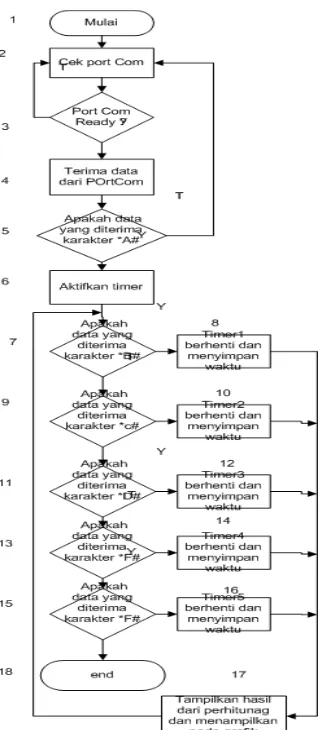
Gambar 10. Diagram Alir Program Vb sensor Infrared
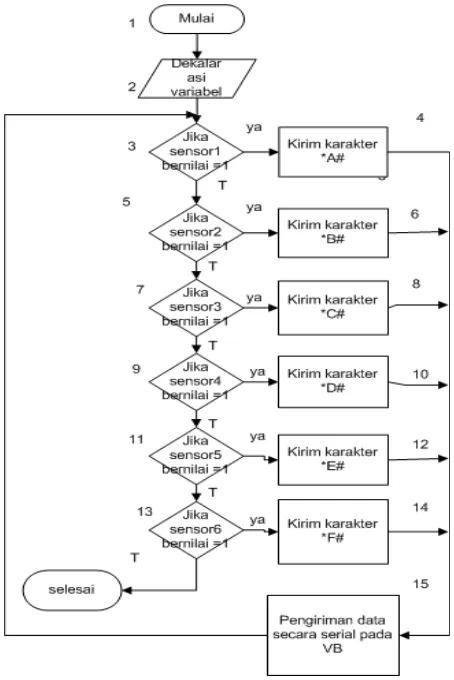
[image:41.595.101.298.75.612.2]Diagram alir pada Gambar 7 merupakan alir program mikrokontroler untuk sesnor infrared. Data karakter yang dikirim oleh mikrokontroler berupa karakter *A#,*B#,*C#,*D#,*E#,*F#, ketika sensor mengeluarkan output maka mikrokontroler akan mengirim data berupa karakterk pada komputer .Diagram alir pada
Hidayat, Ditya Prasetia
6 kemudian mengkonversi data yang diterima dan membaca posisi kemiringan sebelum nya serta menjalankan motor sesuai data yang dikirim oleh vb.
Diagram alir pada Gambar 9 merupakan alir program vb untuk motor power windows yang bekerja mengirim data berupa karakter pada
mikrokontroler berupa
*D=30#,*D=40#,*D=45#,*D=50#,*D=55#,*D =60#, dan mikrokontroler akan menerima data
menjalankan driver relay dan menjalankan motor sesuai data yang diterima.
Diagram alir pada Gambar 9 merupakan alir program vb untuk sensor infrared yang bekerja ketika vb menerima data dari mikrokontroler berupa karakter *A#,*B#,*C#,*D#,*E#,*F#, maka vb akan menghentikan timer dan memproses perhitungan data yang sudah diperoleh.
3. HASIL PENGUJIAN
[image:42.595.96.260.350.414.2]Pengujian pada sensor infrared pengujian dilakukan dengan cara pengujian tegangan output yang berguna untuk mengatahui respon ketika sensor infrared ditutup dan ketika tidak tertutup.
Tabel.1 pengujian infrared
No. Keadaan
Infrared
Tegangan Output
1 Tertutup 15.5 mv
2 Tidak tertutup 4.83 V
Pengujian Komunikasi Serial
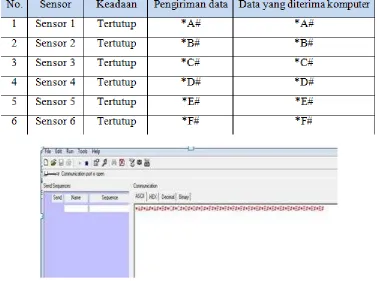
[image:42.595.309.526.406.495.2]Pengujian komunikasi serial dari sensor pada komputer, sensor akan mengirim output pada mikrokontroler pada saat sensor tertutupi oleh benda dan akan menampilkan data berupa karakter *A#,*B#,*C#,*D#,*E#,*F#.
Tabel.2 pengujian Komunikasi serial
No. Sensor Kea
daan Pengiri man data Data yang diterima komputer
1 Sensor 1 Tert
utup
*A# *A#
2 Sensor 2 Tert
utup
*B# *B#
3 Sensor 3 Tert
utup
*C# *C#
4 Sensor 4 Tert
utup
*D# *D#
5 Sensor 5 Tert
utup
*E# *E#
6 Sensor 6 Tert
utup
*F# *F#
Gambar 11. Pengujian komunikasi serial
Analisa Data Secara Manual
Analisis secara manual dilakukan dengan melakukan pengambilan data waktu dari perancangan alat simulator GLBB dan untuk perhitungan nya dilakukan secara matematis atau secara manual dengan massa benda 38.82 (g).
Tabel.3 Analisa secara manual pada sudut 300
No Jarak
(cm) Waktu (s) Massa (g) Vt=vo+a.t (m/s) a=g.sinѲ -µ(g.cosѲ)
(m/s2)
1 10 0.04 38.82 0.0002 4.13
2 20 0.12 38.82 0.0005 4.13
3 30 0.16 38.82 0.0007 4.13
4 40 0.20 38.82 0.0008 4.13
[image:42.595.310.526.533.625.2]5 50 0.24 38.82 0.0009 4.13
Tabel.4 Analisa secara manual pada sudut 400
No Jarak
(cm) Waktu (s) Massa (g) Vt=vo+a.t (m/s)
a=g.sinѲ
-µ(g.cosѲ)
(m/s2)
1 10 0.05 38.82 0.0003 5.63
2 20 0.09 38.82 0.0005 5.63
3 30 0.13 38.82 0.0007 5.63
4 40 0.17 38.82 0.001 5.63
[image:42.595.80.276.541.707.2]5 50 0.21 38.82 0.0012 5.63
Tabel.5 Analisa secara manual pada sudut 450
No Jarak
(cm) Waktu (s) Massa (g) Vt=vo+a.t (m/s) a=g.sinѲ -µ(g.cosѲ)
(m/s2)
1 10 0.04 38.82 0.0003 6.36
2 20 0.08 38.82 0.0005 6.36
3 30 0.16 38.82 0.001 6.36
4 40 0.20 38.82 0.0013 6.36
[image:42.595.307.526.662.750.2]PERANCANGAN SIMULATOR GERAK LURUS BERUBAH BERATURAN (GLBB) BERBASIS MIKROKONTROLER ATMEGA 8535
7 Tabel.6 Analisa secara manual 500
No Jarak
(cm) Waktu (s) Massa (g) Vt=vo+a.t (m/s) a=g.sinѲ -µ(g.cosѲ)
(m/s2)
1 10 0.04 38.82 0.0002 7.01
2 20 0.09 38.82 0.0006 7.01
3 30 0.13 38.82 0.0009 7.01
4 40 0.18 38.82 0.0012 7.01
5 50 0.22 38.82 0.0015 7.01
Tabel.7 Analisa secara manual pada sudut 550
No Jarak
(cm) Waktu (s) Massa (g) Vt=vo+a.t (m/s) a=g.sinѲ -µ(g.cosѲ)
(m/s2)
1 10 0.05 38.82 0.0004 7.62
2 20 0.09 38.82 0.0007 7.62
3 30 0.13 38.82 0.001 7.62
4 40 0.17 38.82 0.0012 7.62
5 50 0.25 38.82 0.0019 7.62
Tabel.8 Analisa secara manual pada sudut 600
No Jarak
(cm) Waktu (s) Massa (g) Vt=vo+a.t (m/s) a=g.sinѲ -µ(g.cosѲ)
(m/s2)
1 10 0.05 38.82 0.0004 8.16
2 20 0.09 38.82 0.0007 8.16
3 30 0.13 38.82 0.0011 8.16
4 40 0.17 38.82 0.0014 8.16
5 50 0.29 38.82 0.0024 8.16
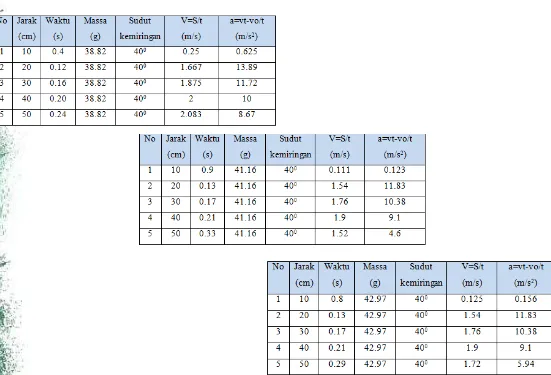
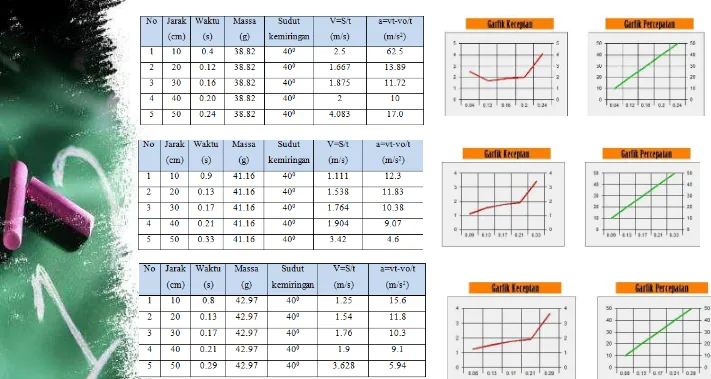
Analisa Data Secara otomatis
Pengambilan data secara otomatis telah dilakukan pada posisi 300, 400, 450 dengan massa 38.82 (gr),41.16 (gr), 42.97 (gr) yang menghasilkan data sebagai berikut:
Tabel.8 Analisa secara Otomatis pada sudut 300
No Jarak
(cm) Waktu (s) Massa (g) Vt=vo+a.t (m/s)
a=g.sinѲ
-µ(g.cosѲ)
(m/s2)
1 10 0.4 38.82 0.0002 4.13
2 20 0.12 38.82 0.0005 4.13
3 30 0.16 38.82 0.0007 4.13
4 40 0.20 38.82 0.0008 4.13
[image:43.595.326.511.87.188.2]5 50 0.24 38.82 0.001 4.13
Gambar 11. Grafik pada sudut 300 massa 38.82 (g)
Tabel.9Analisa secara Otomatis 400
No Jarak
(cm) Waktu (s) Massa (g) Vt=vo+a.t (m/s) a=g.sinѲ -µ(g.cosѲ)
(m/s2)
1 10 0.5 38.82 0.0003 5.63
2 20 0.9 38.82 0.0005 5.63
3 30 0.13 38.82 0.0007 5.63
4 40 0.17 38.82 0.001 5.63
[image:43.595.310.525.220.419.2]5 50 0.21 38.82 0.0012 5.63
Gambar 12. Grafik pada sudut 400 massa 38.82 (g)
Tabel.10 Analisa secara Otomatis pada sudut 450
No Jarak
(cm) Waktu (s) Massa (g) Vt=vo+a.t (m/s) a=g.sinѲ -µ(g.cosѲ)
(m/s2)
1 10 0.4 38.82 0.0003 6.36
2 20 0.12 38.82 0.0005 6.36
3 30 0.16 38.82 0.001 6.36
4 40 0.20 38.82 0.0013 6.36
[image:43.595.305.524.466.681.2]5 50 0.24 38.82 0.0015 6.36
Hidayat, Ditya Prasetia
8 Tabel.11 Analisa secara Otomatis pada sudut
500
No Jarak
(cm) Waktu (s) Massa (g) Vt=vo+a.t (m/s) a=g.sinѲ -µ(g.cosѲ)
(m/s2)
1 10 0.4 38.82 0.0003 7.01
2 20 0.9 38.82 0.0006 7.01
3 30 0.13 38.82 0.009 7.01
4 40 0.18 38.82 0.0013 7.01
[image:44.595.311.515.83.190.2]5 50 0.22 38.82 0.0015 7.01
Gambar 14. Grafik pada sudut 500 massa 38.82 (g)
Tabel.11 Analisa secara Otomatis pada sudut 550
No Jarak
(cm) Waktu (s) Massa (g) Vt=vo+a.t (m/s) a=g.sinѲ -µ(g.cosѲ)
(m/s2)
1 10 0.45 38.82 0.0004 7.62
2 20 0.9 38.82 0.0007 7.62
3 30 0.13 38.82 0.001 7.62
4 40 0.17 38.82 0.0013 7.62
[image:44.595.71.285.110.323.2]5 50 0.25 38.82 0.0019 7.62
Gambar 15. Grafik pada sudut 550 massa 38.82 (g)
Tabel.12 Analisa secara Otomatis pada sudut 600
No Jarak
(cm) Waktu (s) Massa (g) Vt=vo+a.t (m/s) a=g.sinѲ -µ(g.cosѲ)
(m/s2)
1 10 0.5 38.82 0.0004 8.16
2 20 0.9 38.82 0.0007 8.16
3 30 0.13 38.82 0.0011 8.16
4 40 0.17 38.82 0.0014 8.16
5 50 0.29 38.82 0.0024 8.16
Gambar 16. Grafik pada sudut 600 massa 38.82 (g)
Analisi data secara otomatis pada sudut 300 dengan massa 38.82 (gr), didapat hasil yang kecepatan yang semakin lama semakin cepat dengan kecepatan akhir 4.083 (m/s) dengan grafik kecepatan menunjukan bahwa kecepatan benda semakin lama semakin cepat sedangkan untuk grafik percepatan perubahan jarak terhadap waktu menunjukan bahawa perubahan waktu yang konstan
4. SIMPULAN DAN SARAN
Kesimpulan
Dari hasil penelitian dan analisa dapat disimpulkan sebagai berikut:
1. Perancangan alat simulator GLBB telah selesai dibuat.
2. Dari hasil perhitungan secara otomatis dan manual dapat dibandingkan hasil pengukuran dari sudut 300 yaitu dengan percepatan 4.13 m/s2 dan pada sudut 400 dengan percepatan 5.63 m/s2, pada sudut 450 memiliki percepatan 6.36 m/s2, pada sudut 500 didapat percepatan 7.01 m/s2, pada sudut 550 memiliki percepatan 7.62 m/s2 sedangkan pada sudut 600 memiliki percepatan 8.16 m/s2. Pada hasil pengukuran otomatis dan manual didapat hasil percepatan yang sama pada masing-masing sudut walaupun massa yang digunakan berbeda, yang membedakannya yaitu hasil dari kecepatannya ketika massa semakin besar maka kecepatan semakin cepat dibandingkan dengan massa yang lebih kecil.
[image:44.595.71.285.372.595.2]PERANCANGAN SIMULATOR GERAK LURUS BERUBAH BERATURAN (GLBB) BERBASIS MIKROKONTROLER ATMEGA 8535
9
Saran
Saran untuk penelitian selanjutnya agar lebih baik yaitu :
a. Pengukuran kecepatan dan percepatan untuk massa benda dan sudut dapat dimasukan pada perhitungan GLBB. b. Pengaturan jarak sensor agar lebih
presisi dan data yang didapat lebih akurrat.
5. DAFTAR PUSTAKA
[1].datasheetdir. (n.d.). CPC2014N. Retrieved 01 13, 2013, from 8-Pin SOIC Dual OptoMOS® Relay: http://www.datasheetdir.com/CPC2014 N+Solid-State-Relays
[2].Electronics, I. (2005). Infrared Receiver. Retrieved 01 13, 2013, from www.innovativeelectronics.com pada bagian Support.