STUDI PENGATURAN KECEPATAN MOTOR ARUS SEARAH
DENGAN MENGGUNAKAN SILICON CONTROLLED RECTIFIER
PADA SECTIONAL DC DRIVES PULP MACHINE
Bahan Seminar Tugas Akhir
(Aplikasi pada PT Toba Pulp Lestari, Tbk.)
Oleh:
NIM : 040402082
IMMANUEL SIHOMBING
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
ABSTRAK
Motor arus searah merupakan motor yang paling banyak digunakan dalam aplikasi mesin listrik yang membutuhkan pengaturan kecepatan dan pengontrolan torsi dengan kehandalan yang tinggi. Hal ini dikarenakan fluks dan torsi motor arus searah lebih mudah diatur, yaitu dengan mengubah arus jangkarnya. Di samping itu, pengontrolan motor dc lebih sederhana dan lebih mudah (tanpa membutuhkan peralatan elektronika yang kompleks).
Seiring dengan kemajuan teknologi di bidang elektronika daya begitu pesatnya, pengaturan motor yang sebelumnya sering dilakukan dengan cara konvensional, sekarang telah banyak beralih menggunakan komponen elektronika daya. Motor arus searah merupakan salah satu jenis motor yang sering digunakan, hal ini disebabkan karena banyaknya metode pengaturan yang dapat digunakan untuk mengatur kecepatannya. Maka, dalam aplikasi ini kecepatan motor arus searah dapat dikontrol oleh dc drives dengan pengaturan tegangan jangkar motor yang menggunakan komponen elektronika daya yaitu
KATA PENGANTAR
Segala pujian, hormat dan syukur hanyalah bagi-Nya Tuhan Yesus Kristus yang telah memampukan penulis menyelesaikan penulisan Tugas Akhir ini. Ada begitu banyak hal yang tidak dapat mengerti oleh penulis sejak penulisan Tugas Akhir ini, namun Dia yang adalah sumber hikmat dan pengetahuan menyingkapkan segala ketidakmengertian yang saya alami sehingga saya dapat menyelesaikan penulisan Tugas Akhir ini dengan baik. Penulisan Tugas Akhir ini bertujuan memenuhi syarat kurikulum Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara dalam menyelesaikan program studi Strata Satu (S-1). Adapun judul Tugas Akhir ini adalah:
“Studi Pengaturan Kecepatan Motor Arus Searah
Dengan Menggunakan Silicon Controlled Rectifier Pada
Sectional DC Drives Pulp Machine
(Aplikasi Pada PT Toba Pulp Lestari, Tbk.)”
Selama penulisan Tugas Akhir ini, penulis mendapatkan banyak bimbingan, kritikan, motivasi, dan bantuan baik secara moril dan materi dari berbagai pihak sehingga dengan rasa syukur dan segala kerendahan hati, penulis mengucapkan terimakasih yang sebesar-besarnya kepada:
1. Mama saya tercinta, A. br. Munthe, Am.Keb., kakak dan adik-adik saya yang tercinta Seprina Sihombing, S.Si, Maylando Sihombing, Rosnella Sihombing atas segala dukungan, dana, motivasi dan terlebih doa-doanya.
3. Bapak Ir. M. Zulfin, MT, selaku dosen wali penulis yang telah membantu penulis dari awal perkuliahan hingga menyelesaikan Tugas Akhir ini.
4. Bapak Ir. Nasrul Abdi, MT selaku Ketua Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara.
5. Bapak Ir. Rahmat Fauzi, MT, selaku Sekretaris Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara.
6. Seluruh Staf Pengajar dan Pegawai di Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara.
7. Bang Elis Silalahi, ST yang telah banyak membantu penulis dalam penelitian di PT. Toba Pulp Lestari, Tbk. baik dalam dana, daya, motivasi dan doa. 8. Bapak Ir. Lie Liang San, Ir. Rencana M. Sembiring selaku manajemen di
Divisi Elektronik PT. Toba Pulp Lestari, Tbk.
9. Keluarga besar Laboratorium Sistem Tenaga, Bapak Ir. R.Sugiharto Yusuf selaku kepala Laboratorium, Bapak Bantu selaku pegawai laboratorium, Bapak Ir. Zulkarnaen Pane, rekan-rekan asisten, Ronald Sibuea, Khoirul Irpan, dan Dedi Mahendra.
10.Seluruh teman-teman se-perjuangan stambuk 2004, Jeremia, Juan Rio, Sutrisno, Rudi Masrul, Roy Alfred, Chandra, Juan Khan, Dodi Barus, Bangun Pangaribuan, Irwanto, Ojak dan semua teman-teman yang tidak dapat saya sebutkan, Bersemangatlah!!! Give the best!!!!
11.Teman-teman KTB “Jehova Rohi” (Herberd, ST., Alexander, M. Jekson) dan adik-adik KK “Salvation” (Bonar, Folda, Frans, Ivan, Okta, Ronald) atas segala dukungan dan doa-doanya.
13.Teman-teman penulis, penghuni Jl. Harmonika 27 (Darwin, David, Parlot, Anto, Guido, dll), Grace, Juana, Caroline, Widya, ST., Jepri, Saor, Robert Siahaan, Sondang “Gendut” dan teman-teman yang tidak dapat penulis sebutkan satu per satu.
Penulis menyadari masih banyak kekurangan dalam penulisan Tugas Akhir ini. Oleh karena itu, penulis sangat mengharapkan kritik dan saran yang membangun demi penyempurnaan Tugas Akhir ini. Kiranya Tugas Akhir ini dapat bermanfaat dan menambah pengetahuan bagi kita semua. Terimakasih.
Medan, November 2008
Penulis
DAFTAR ISI
Abstrak ... i
Kata Pengantar ... ii
Daftar Isi ... v
Daftar Gambar ... viii
BAB I : PENDAHULUAN I.1. Latar Belakang ... 1
I.2. Tujuan Penulisan ... 3
I.3. Manfaat Penulisan ... 3
I.4. Batasan Masalah ... 3
I.5. Metodologi Penulisan ... 4
I.6. Sistematika Penulisan ... 4
BAB II : MOTOR ARUS SEARAH II.1. Umum ... 6
II.2. Konstruksi Motor Arus Searah ... 6
II.3. Rangkaian Ekivalen Motor Arus Searah ... 11
II.4. Prinsip Kerja Motor Arus Searah ... 13
II.5. GGL Lawan dan Torsi Induksi ... 21
II.6. Jenis - Jenis Motor Arus Searah... 23
II.7. Reaksi Jangkar... 28
BAB III : PENGATURAN KECEPATAN MOTOR ARUS SEARAH
DENGAN MENGGUNAKAN SILICON CONTROLLED
RECTIFIER
III.1. Umum ... 33
III.2. Karakteristik dan Prinsip Kerja SCR ... 35
III.3. Penyearah Terkendali ... 38
III.3.1. Konverter Penuh Tiga Phasa ... 39
III.3.2. Konverter Penuh Tiga Phasa Dengan Beban RL... 42
III.4. Pengaturan Kecepatan Motor Arus Searah dengan Meng- gunakan Silicon Controlled Rectifier (SCR)... 43
BAB IV : PENGATURAN KECEPATAN MOTOR ARUS SEARAH DENGAN MENGGUNAKAN SILICON CONTROLLED RECTIFIER PADA SECTIONAL DC DRIVES PULP MACHINE IV.1. Umum ... 57
IV.2. Sectional Pulp Machine Dc Drives ... 58
IV.2.1 Diagram Blok Dc Drive ... 60
IV.2.2 Kontrol Closed-Loop Dc Drives Pulp Machine ... 61
IV.2.3. Rangkaian Kontrol Sectional Pulp Machine ... 66
IV.3. Data Motor dan Dc Drives Pulp Machine ... 68
BAB V : KESIMPULAN
V.1. Kesimpulan ... 71 V.1. Saran ... 71
DAFTAR PUSTAKA
DAFTAR GAMBAR
Gambar 2.1 Konstruksi bagian stator motor arus searah ... 6
Gambar 2.2 Konstruksi bagian rotor motor arus searah ... 7
Gambar 2.3 Konstruksi motor arus searah ... 7
Gambar 2.4 Kutub medan ... 8
Gambar 2.5 Jangkar ... 9
Gambar 2.6 Rangkaian ekivalen motor arus searah ... 11
Gambar 2.7 Pengaruh penempatan konduktor berarus dalam ... 13
Gambar 2.8 Prinsip perputaran motor arus searah... 15
Gambar 2.9 Gelombang tegangan pada ujung konduktor jangkar ... 21
Gambar 2.10 Rangkaian ekivalen motor arus searah penguatan bebas ... 24
Gambar 2.11 Rangkaian ekivalen motor arus searah penguatan seri ... 25
Gambar 2.12 Rangkaian ekivalen motor arus searah penguatan shunt ... 25
Gambar 2.13 Rangkaian ekivalen motor arus searah penguatan kompon pendek ... 26
Gambar 2.14 Rangkaian ekivalen motor arus searah penguatan kompon panjang ... 27
Gambar 2.15 Fluksi yang dihasilkan oleh kumparan medan ... 28
Gambar 2.16 Fluksi yang dihasilkan kumparan jangkar... 29
Gambar 2.17 Pembelokan fluksi karena interaksi fluksi medan dan fluksi jangkar ... 30
Gambar 2.18 Aliran daya motor arus searah penguatan shunt ... 32
Gambar 3.2 Simbol SCR dan tiga pn-junction... ... 36
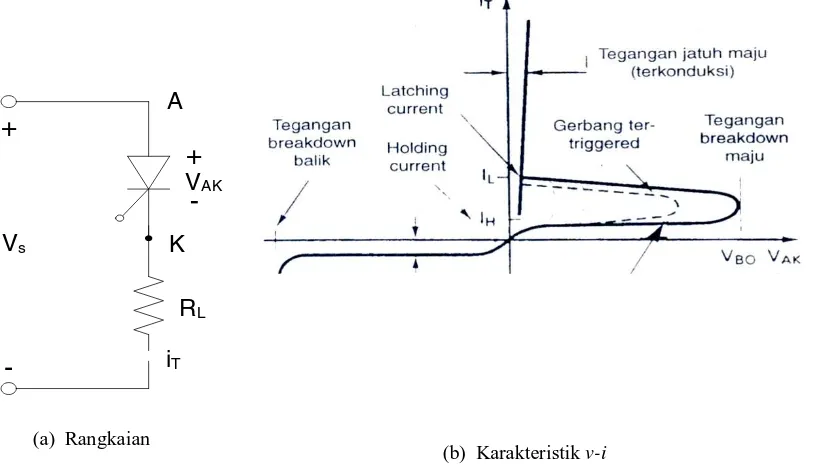
Gambar 3.3 Rangkaian SCR dan karakteristik v-i ... 37
Gambar 3.4 Konverter penuh tiga phasa ... 40
Gambar 3.5 Konverter thyristor enam-pulsa tiga phasa ... 44
Gambar 3.6 Konverter thyristor enam-pulsa tiga phasa dengan mode inverter dengan “beban aktif”... 48
Gambar 3.7 Rangkaian ekivalen konverter thyristor enam-pulsa tiga phasa mode inverter ... 49
Gambar 3.8 Diagram blok kontrol ... 50
Gambar 3.9 Konverter thyristor enam-pulsa tiga phasa kontrol motor ... 51
Gambar 4.1 Sistem kontrol dc drives pada motor ... 58
Gambar 4.2 Diagram blok dc drive ... 60
Gambar 4.3 Encoder ... 63
Gambar 4.4 Sensing arus saluran bolak-balik ... 64
Gambar 4.5 Press Section Pulp Machine Dc Drives ... 66
Gambar 4.6 Dryer and Cutter Pulp Machine Dc Drives ... 66
ABSTRAK
Motor arus searah merupakan motor yang paling banyak digunakan dalam aplikasi mesin listrik yang membutuhkan pengaturan kecepatan dan pengontrolan torsi dengan kehandalan yang tinggi. Hal ini dikarenakan fluks dan torsi motor arus searah lebih mudah diatur, yaitu dengan mengubah arus jangkarnya. Di samping itu, pengontrolan motor dc lebih sederhana dan lebih mudah (tanpa membutuhkan peralatan elektronika yang kompleks).
Seiring dengan kemajuan teknologi di bidang elektronika daya begitu pesatnya, pengaturan motor yang sebelumnya sering dilakukan dengan cara konvensional, sekarang telah banyak beralih menggunakan komponen elektronika daya. Motor arus searah merupakan salah satu jenis motor yang sering digunakan, hal ini disebabkan karena banyaknya metode pengaturan yang dapat digunakan untuk mengatur kecepatannya. Maka, dalam aplikasi ini kecepatan motor arus searah dapat dikontrol oleh dc drives dengan pengaturan tegangan jangkar motor yang menggunakan komponen elektronika daya yaitu
BAB I
PENDAHULUAN
I.1 LATAR BELAKANG PENULISAN
Sebagaimana kita ketahui, sekarang ini perindustrian di negara kita mengalami perkembangan yang sangat pesat, baik pada perindustrian yang besar maupun perindustrian yang kecil. Sejalan dengan perkembangan tersebut, kebutuhan akan motor-motor listrik meningkat pula sesuai dengan kebutuhan pasar. Sebagian besar dari peralatan industri menggunakan tenaga listrik sebagai penggerak utama, yaitu motor listrik. Pemilihan motor listrik untuk industri merupakan salah satu hal penting yang harus dipertimbangkan.
Dewasa ini, kemajuan teknologi di bidang elektronika daya begitu pesatnya sehingga pengaturan kecepatan motor arus searah yang sebelumnya diatur dengan metode-metode tersebut, kini telah dapat dilakukan dengan menggunakan komponen elektronika daya. Seiring dengan kemajuan teknologi tersebut pengaturan kecepatan motor arus searah dengan mengatur tegangan terminal jangkar pada umumnya telah menggunakan Silicon Controlled Rectifier (SCR). Pada awalnya pengontrolan kecepatan dengan mengatur besar tegangan terminal jangkar menggunakan SCR ini dilakukan penundaan sudut penyalaannya. Tetapi dengan cara biasa dengan menggunakan SCR saja dilihat tidak efektif dan efisien karena banyaknya motor yang akan dikontrol dan kecepatan yang dihasilkan berbeda-beda sesuai dengan kebutuhan.
I.2 TUJUAN PENULISAN
Adapun tujuan penulisan tugas akhir ini adalah
1. Untuk mengetahui aplikasi Silicon Controlled Rectifier(SCR) terhadap sistem pengaturan kecepatan motor arus searah.
2. Untuk memberikan pembahasan sistem pengontrolan kecepatan motor arus searah menggunakan silicon controlled rectifier pada sectional dc drives pulp machine di PT Toba Pulp Lestari, Tbk.
I.3 MANFAAT PENULISAN
Tugas penulisan tugas akhir ini diharapkan bermanfaat untuk memberikan informasi, memperkaya pengetahuan dan wawasan penulis serta pembaca mengenai aplikasi teknologi elektronika daya dc drives yang digunakan pada sistem pengontrolan kecepatan motor arus searah menggunakan silicon controlled rectifier khususnya pada dc drives pulp machine di PT Toba Pulp Lestari, Tbk.
I.4 BATASAN MASALAH
Untuk menghindari pembahasan masalah yang meluas, maka penulis membatasi masalah yang akan dibahas. Adapun batasan masalah dalam penulisan tugas akhir ini adalah:
1. Motor yang dibahas dalam tugas akhir ini adalah motor arus searah penguatan terpisah.
3. Tidak membahas secara mendalam peralatan elektronika daya pada sectional dc drives pulp machine.
4. Tidak membahas secara mendalam mengenai harmonisasi yang ditimbulkan akibat pemakaian silicon controlled rectifier dalam mengontrol kecepatan motor arus searah.
5. Analisa studi berdasarkan sistem pengaturan kecepatan motor arus searah di PT Toba Pulp Lestari, Tbk.
I.5 METODOLOGI PENULISAN
Metode yang digunakan dalam penulisan tugas akhir ini adalah sebagai berikut: 1. Studi literatur, berupa studi kepustakaan dari buku-buku referensi, jurnal,
majalah dan sebagainya.
2. Studi lapangan, berupa pengambilan data dan infomasi yang diperlukan dari PT Toba Pulp Lestari, Tbk. tentang pengontrolan kecepatan motor arus searah dengan menggunakan silicon controlled rectifier pada sectional dc drivespulp machine.
3. Studi bimbingan, berupa tanya jawab dengan dosen pembimbing yang telah ditunjuk oleh pihak Departemen Teknik Elektro USU, mengenai masalah-masalah yang timbul selama penulisan tugas akhir ini.
I.6 SISTEMATIKA PENULISAN
BAB I: PENDAHULUAN
Bab ini menguraikan latar belakang penulisan, tujuan penulisan, batasan masalah, metode penulisan, sistematika penulisan.
BAB II: MOTOR ARUS SEARAH
Bab ini menjelaskan konstruksi motor arus searah, rangkaian ekivalen, prinsip kerja, ggl lawan dan torsi pada motor arus searah, jenis-jenis motor arus searah berdasarkan penguatannya, reaksi jangkar, aliran daya dan rugi-rugi daya.
BAB III: PENGATURAN KECEPATAN MOTOR ARUS SEARAH
DENGAN PENGATURAN TEGANGAN MENGGUNAKAN
SILICON CONTROLLED RECTIFIER
Bab ini menjelaskan prinsip pengaturan kecepatan motor arus searah dengan menggunakan silicon controlled rectifier.
BAB IV: PENGATURAN KECEPATAN MOTOR ARUS SEARAH
DENGAN MENGGUNAKAN SILICON CONTROLLED
RECTIFIER PADA SECTIONAL DC DRIVES PULP
MACHINE
Bab ini menjelaskan metode pengaturan kecepatan motor arus searah dengan menggunakan silicon control rectifier pada sectional dc drives pulp machine serta langkah-langkah pengaturannya.
BAB V: PENUTUP
BAB II
MOTOR ARUS SEARAH
II.1 UMUM
Pada prinsipnya, mesin listrik dapat berlaku sebagai motor dan generator. Tetapi kedua mesin ini memiliki perbedaan yang terletak pada pengkonversian dayanya. Generator adalah suatu mesin listrik yang mengubah energi mekanik menjadi energi listrik. Sedangkan motor adalah suatu mesin listrik yang mengubah energi listrik menjadi energi mekanik. Maka dengan membalik generator arus searah dimana sekarang tegangan sumber dan tegangan jangkar merupakan ggl lawan maka mesin arus searah ini akan berlaku sebagai motor.
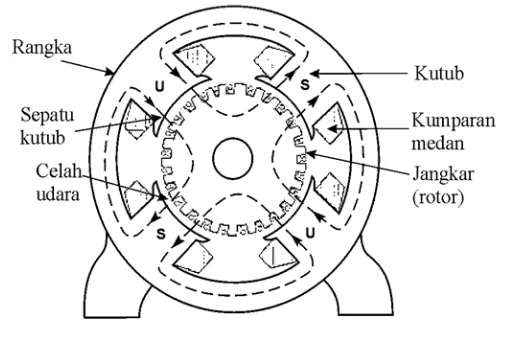
II.2 KONSTRUKSI MOTOR ARUS SEARAH
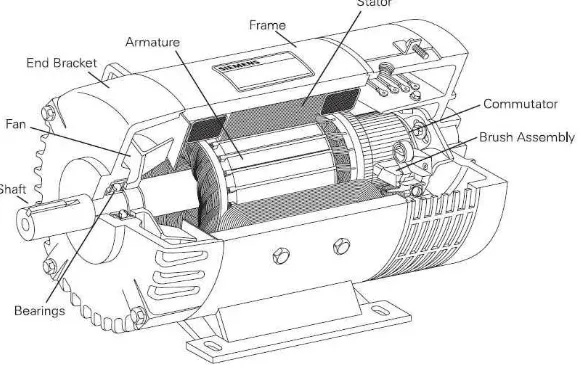
Secara umum mesin arus searah memiliki konstruksi yang terbagi atas dua bagian, yaitu bagian yang diam yaitu stator dan bagian yang bergerak/berputar yaitu rotor. Untuk lebih jelasnya, konstruksi motor arus searah dapat dilihat pada gambar dibawah ini.
Gambar 2.3 Konstruksi motor arus searah
Konstruksi dasar motor arus searah tersusun dari beberapa :
1. Rangka (Frame )
Rangka motor arus searah berfungsi sebagai tempat untuk meletakkan sebagian besar komponen mesin. Untuk itu, rangka harus di rancang memiliki kekuatan mekanis yang tinggi untuk mendukung komponen-komponen mesin. Selain sebagai sarana pendukung mekanis untuk mesin secara keseluruhan, rangka juga berfungsi untuk membawa fluksi magnetik yang dihasilkan oleh kutub-kutub mesin. Untuk mesin kecil, dimana pertimbangan harga lebih
dominan daripada beratnya, biasanya rangkanya terbuat dari besi tuang (cast iron), tetapi untuk mesin-mesin besar pada umumnya terbuat dari baja tuang (cast steel) atau baja lembaran (rolled steel). Rangka ini pada bagian dalam dilaminasi untuk mengurangi rugi-rugi inti, selain itu rangka ini juga harus memiliki permeabilitas yang tinggi disamping kuat secara mekanis.
2. Kutub ( Pole )
Magnet penguat atau magnet medan terdiri atas inti kutub dan sepatu kutub. Inti kutub terdiri dari laminasi-laminasi plat baja yang terisolasi satu sama lain dan direkatkan bersama-sama kemudian dibaut pada rangka. Pada inti kutub ini dibelitkan kumparan medan yang berfungsi menghasilkan fluksi magnetik. Sedangkan sepatu kutub merupakan permukaan dari kutub yang berdekatan dengan celah udara yang dibuat lebih besar dari badan ini.
Laminasi Inti Kutub
Sepatu Kutub Lubang
Baut
Gambar 2.4 Kutub medan
Adapun fungsi dari sepatu kutub adalah:
1. Menyebarkan fluks pada celah udara dan juga karena merupakan bidang lebar, maka akan mengurangi reluktansi jalur magnet.
Kumparan penguat atau kumparan kutub terbuat dari kawat tembaga (berbentuk bulat atau strip/persegi) yang dililitkan sedemikian rupa dengan ukuran tertentu.
3. Kumparan Medan
Kumparan medan merupakan susunan konduktor yang terbuat dari kawat tembaga yang berbentuk bulat ataupun persegi dan dibelitkan pada inti kutub. Kumparan pada setiap kutub dihubungkan secara seri untuk membentuk rangkaian medan. Rangkaian medan inilah yang berfungsi untuk menghasilkan fluksi magnet. Rangkaian medan dapat dihubungkan secara seri ataupun paralel dengan kumparan jangkar dan juga dapat dihubungkan tersendiri secara langsung ke sumber tegangan, sesuai dengan jenis penguatan pada motor. Banyaknya belitan pada setiap kutub tergantung hubungan kumparan medan dan kumparan jangkar.
4. Jangkar
Jangkar adalah bagian yang berputar pada motor arus searah yang dipasak pada poros dan berputar diantara kutub medan seperti pada gambar 2.5 berikut:
Laminasi
Slot
Gambar 2.5 Jangkar
slot-slot atau alur-alur yang menupakan tempat melilitkan kumparan jangkar. Kumparan jangkar biasanya berbentuk wound yang diletakkan di slot-slot pada inti.
5. Komutator
Komutator terbuat dari batangan tembaga yang dikeraskan (dropforged) yang diisolasi dengan bahan sejenis mika. Adapun fungsi komutator ini adalah untuk mengumpulkan arus listrik induksi dari konduktor jangkar dan mengkonversikannya menjadi arus searah melalui sikat.
6. Sikat (Brushes)
Sikat terbuat dari karbon, grafit (graphite), logam grafit atau campuran karbon-grafit yang dilengkapi dengan pegas penekan dan kotak sikatnya. Besarnya tekanan pegas dapat diatur sesuai keinginan. Permukaan sikat ditekan ke permukaan segmen komutator untuk menyalurkan arus listrik. Karbon yang ada diusahakan memiliki konduktivitas yang tinggi untuk mengurangi rugi-rugi listrik dan koefisien gesekan yang rendah untuk mengurangi keausan (excessive wear).
7. Kumparan Jangkar
Kumparan jangkar (rotor) berbentuk seperti permata. Kumparan jangkar pada motor arus searah berfungsi sebagai tempat dibangkitkannya ggl induksi. Sedangkan macam konstruksi kumparan jangkar (rotor) antara lain:
1. Kumparan jerat (lap winding)
8. Celah Udara
Celah udara merupakan ruang atau celah antara permukaan jangkar dengan permukaan kutub-kutub medan yang menyebabkan jangkar tidak bergesekan dengan kutub-kutub medan. Fungsi dari celah ini adalah sebagai tempat mengalirnya fluksi yang dihasilkan oleh kutub-kutub medan. Celah udara ini diusahakan sekecil mungkin, semakin besar celah udara maka akan menghasilkan reluktansi yang tinggi, tetapi jika semakin kecil celah udara akan menghasilkan reluktansi yang kecil sehingga dapat meningkatkan efisiensi motor.
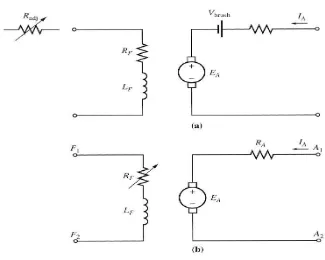
II.3 RANGKAIAN EKIVALEN MOTOR ARUS SEARAH
Rangkaian ekivalen motor arus searah dapat ditunjukkan seperti pada gambar 2.6. Dari gambar tersebut, kumparan jangkar dinyatakan dengan tegangan sumber Ea dan tahanan Ra. Rangkaian ini sesuai dengan prinsip thevenin untuk
semua struktur rotor, termasuk kumparan rotor, hubungan antar kutub penggantian belitan jika ada. Tegangan jatuh pada sikat dinyatakan oleh sumber tegangan rendah Vbrush yang berlawanan dengan aliran arus searah pada motor. Kumparan medan yang akan menghasilkan fluksi magnetik pada motor arus searah dinyatakan oleh induktor LF dan tahanan RF. Sedangkan tahanan terpisah Radj sebagai tahanan eksternal yang dapat diatur digunakan untuk mengatur besar arus yang mengalir dalam kumparan medan.
Ada beberapa variasi dan penyederhanaan dari rangkaian ekivalen motor arus searah yaitu:
1. Tegangan jatuh pada sikat sering sangat kecil sekali dari tegangan yang dibangkitkan pada motor. Jadi, jika dalam suatu kasus yang tidak begitu kritis, tegangan jatuh pada sikat dihilangkan atau termasuk dalam tahanan Ra.
2. Tahanan dalam dari kumparan medan seringkali disatukan dengan tahanan variabel sehingga total tahanannya dinyatakan oleh RF.
3. Untuk beberapa generator yang memiliki lebih dari satu kumparan medan dapat terlihat seperti pada rangkaian ekivalen.
Tegangan yang di bangkitkan pada motor arus searah dapat dinyatakan melalui persamaan:
ω φ. . k
Ea = ………..………(2-1) dan besar torsi yang dibangkitkan oleh motor arus searah adalah:
Kedua persamaan ini, yaitu persamaan hukum tegangan Kirchoff dari kumparan jangkar dan kurva magnetisasi mesin adalah alat yang penting untuk menganalisa kelakuan dan performansi motor arus searah.
II.4 PRINSIP KERJA MOTOR ARUS SEARAH
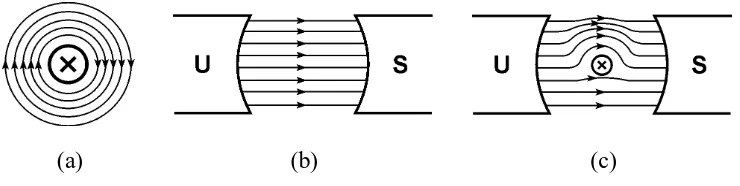
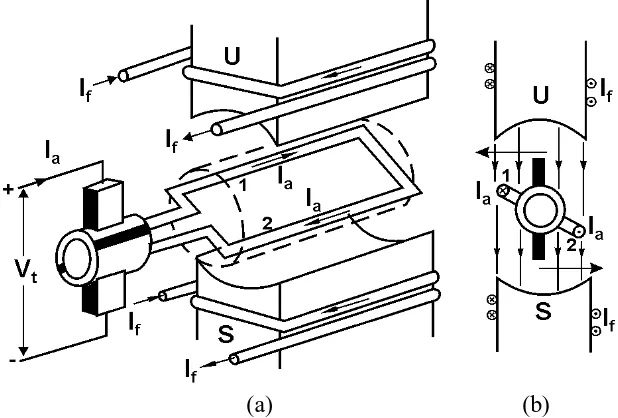
Apabila sebuah konduktor dialiri arus, maka sekeliling konduktor tersebut akan timbul medan listrik dan jikalau konduktor tersebut ditempatkan dalam suatu medan magnet seragam, maka medan listrik konduktor tersebut akan mempengaruhi medan magnet seragam tadi dan akibatnya konduktor tersebut akan mengalami gaya. Gambar 2.7 berikut memperlihatkan pengaruh penempatan konduktor berarus dalam medan magnet seragam.
(a) (b) (c)
Gambar 2.7 Pengaruh penempatan konduktor berarus dalam
selatan (S). Kedua kutub menimbulkan medan magnet seragam yang arahnya dari kutub utara menuju kutub selatan.
memperbesar dengan medan dari kedua kutub. Dengan demikian, pada konduktor tersebut akan mengalami gaya yang mendorong konduktor ke atas.
Prinsip dasar diatas di terapkan pada motor arus searah. Prinsip perputaran motor arus searah dapat dijelaskan dari gambar 2.8 berikut ini:
(a) (b)
Gambar 2.8 Prinsip perputaran motor arus searah
dialiri arus ditempatkan pada sebuah medan magnet maka pada konduktor tersebut akan timbul gaya, maka demikian pula halnya dengan kumparan jangkar. Besar gaya ini tergantung dari besar arus yang mengalir pada kumparan jangkar dan kerapatan fluksi (B) dari kedua kutub. Semakin besar fluksi yang terimbas pada kumparan jangkar maka arus yang mengalir pada kumparan jangkar juga besar, dengan demikian gaya yang terjadi pada konduktor juga semakin besar.
(
B)
F=I l× Newton………(2-3) dimana : I = arus jangkar (ampere)
l = panjang konduktor jangkar (meter) B = rapat fluksi ( Weber/meter2)
Gaya yang terjadi pada kumparan jangkar diatas menimbulkan torsi induksi yang besarnya adalah:
r . F
Tind = Newton-meter .…..………..(2-4) Apabila harga F pada persamaan 2-3 disubstitusi ke persamaan 2-4 maka diperoleh:
Tind = I( l x B ) r...(2-5) dimana r = d/2
Maka, besar torsi keseluruhan yang ditimbulkan oleh jumlah total konduktor jangkar Z adalah:
Tind = Z. I.( l x B ) d/2 Newton-meter.………..…(2-6) Apabila torsi yang dihasilkan motor lebih besar daripada torsi beban maka motor akan tetap berputar. Banyaknya garis fluksi yang menembus konduktor jangkar adalah:
φ = B.A
φ = B. ...(2-7)
Dengan mensubstitusikan persamaan 2-6 dan Ia = a.I ke persamaan 2-7 sehingga
diperoleh:
Tind = Newton-meter………..……...(2-8) Atau, Tind = k.φ.Ia Newton-meter.………..……...(2-9) Dimana: Tind = torsi induk si (N.m)
k =
= konstanta
a
I = arus jangkar (Ampere) P = jumlah kutub
Z = jumlah total konduktor jangkar a = jalur paralel konduktor jangkar
Pada satu kali putaran gaya F akan menghasilkan kerja sebesar F.2 .r Joule sehingga daya mekanik (Pm) yang dibangkitkan oleh jangkar untuk n rpm sebesar:
Pm = F. 2
.
r.
Watt ...(2-10)Pm = (F. r). 2
.
Daya yang dibangkitkan oleh jangkar motor yang berubah jadi daya mekanik juga tergantung dari ggl lawan dan arus jangkar, sehingga dapat dituliskan:
Ea.Ia= Tind. 2 . Ia
Sehingga, Tind = Newton-meter...(2-11)
Dimana: Tind = torsi induk si (N.m) Ea = gaya gerak listrik (Volt)
a
I = arus jangkar (ampere) = kecepatan sudut (rad/detik)
Bila kumparan jangkar motor berputar dalam medan magnet dan memotong fluksi utama sesuai dengan hokum induksi elektomagnetis maka pada kumparan jangkar akan timbul gaya gerak listrik (ggl) induksi rotasi yang arahnya sesuai dengan kaidah tangan kanan, dimana arahnya berlawanan dengan tegangan yang diberikan ke jangkar atau tegangan terminal. Karena arahnya melawan maka ggl induksi ini disebut ggl lawan, yang besarnya:
e = N
Volt...(2-12) dengan, φ = φm sin t
e = N
Volt e = N. . φm cos t Volt
Besarnya ggl induksi maksimum dalam satu belitan adalah: emaks = . φm Volt
Harga rata-ratanya adalah:
er = . emaks Volt
er = . .φm Volt...(2-13) Pada satu putaran jangkar berkutub dua, ggl melalui satu periode. Jika jangkar itu mengadakan n rpm bagi satu periode lamanya t, adalah:
t =
=
detik
Sedangkan untuk jangkar berkutub P, maka:
t =
detik...(2-14)
Dalam satu periode dilalui sudut yang besarnya 2 radial, sehingga: =
Jika, Ea = er = . .φm Volt
Maka, Ea = φm Volt
Ea = 4 φm Volt
Ea = 4 φm Volt
Jangkar memuat N belitan yang terdiri a cabang parallel (cabang jangkar) sehingga tiap cabang jangkar akan mempunyai
buah belitan yang tersambung
seri, sehingga:Ea = 4 φm Volt
Jika jumlah batang penghantar z, maka N =
Maka, Ea = 4 φm Volt
Ea = φm Volt...(2-15)
Oleh karena
bernilai konstan, maka diperoleh:
dimana: Ea = gaya gerak listrik induksi (volt) ka =
= konstanta
n = kecepatan putaran (rpm)
φm = fluksi setiap kutub (weber)
II.5 GGL LAWAN DAN TORSI INDUKSI MOTOR ARUS SEARAH
Ketika jangkar motor berputar, konduktornya akan memotong fluksi utama. Sesuai dengan hukum Faraday, akibat putaran jangkar rotor didalam suatu medan magnetik maka pada kumparannya akan timbul ggl lawan yang arahnya bertentangan dengan tegangan awal yang diberikan pada rotor. Besarnya tegangan yang dibangkitkan pada kumparan jangkar (Na) adalah:
t ω sin φ ω N
Ea = a r f r ...(2-17) Tegangan yang dibangkitkan pada ujung-ujung konduktor kumparan jangkar tersebut merupakan tegangan bolak-balik dengan bentuk gelombang sinusoidal seperti gambar 2.9 berikut ini.
t r ω
a
E
a
E
−
π 2π
0
Gambar 2.9 Gelombang Tegangan Pada Ujung Konduktor Jangkar
[image:32.595.175.455.523.643.2]∫
= π
0 r a a π N ω
1
E φf sinωrt d
( )
ωrt ……….(2-18)r a
a N ω
π 2
E = ………(2-19)
Suatu kumparan jangkar terdiri dari Nc-lilitan, pada tiap Nc-lilitan terdapat Z
jumlah konduktor, maka total jumlah konduktor yang terdapat pada suatu kumparan jangkar yang memiliki Nc-lilitan:
2 Z
Na = ………....(2-20)
Rumus diatas berlaku untuk kumparan tunggal, sementara kenyataannya belitan jangkar motor arus searah memiliki sejumlah kumparan-kumparan. Sebuah mesin memiliki sejumlah Z konduktor dan a jalur paralel, maka jumlah konduktor yang terhubung seri adalah Z/a, maka persamaan 2-20 menjadi:
2a Z
Na = ………..(2-21)
Apabila Ea adalah tegangan yang dibangkitkan diantara kedua sikat, maka dari
persamaan 2-19, 2-20 dan 2-21 diperoleh:
Ea = ωrφf = k ωr φf………...………...(2-22)
dimana: k =
……….…………...(2-23)
Dari persamaan 2-5 torsi yang terjadi pada tiap satu konduktor yang terinduksi dapat dituliskan kembali sebagai berikut:Tind = B.Ia.l.r ..……….(2-24) Oleh karena pada mesin tersebut memiliki jalur paralel (a), dengan demikian:
a r BI
Oleh karena total konduktor yang terhubung seri adalah Z, maka total torsi induksi mesin adalah:
a r Z.B.I
T a
ind
l
= ...(2-26)
Fluks per kutubnya adalah :
φf
( )
P r 2π B B.Ap = l
=
maka:
r 2π
P B
l
= φf...(2-27)
Dengan mensubstitusi persamaan 2-26 ke persamaan 2-27, maka diperoleh:
a 2π
Z.P
Tind = φf Ia = K φf Ia...(2-28)
II.6 JENIS-JENIS MOTOR ARUS SEARAH
Jenis-jenis motor arus searah dibedakan berdasarkan jenis penguatannya, yaitu, hubungan rangkaian kumparan medan dan kumparan jangkar. Motor arus searah dibedakan atas :
1. Motor arus searah penguatan bebas
2. Motor arus searah penguatan sendiri
II.6.1 Motor Arus Searah Penguatan Bebas
Vf
+
Ea Vt
+
-Ia
Ra Rf
-If
Gambar 2.10 Rangkaian Ekivalen Motor Arus Searah Penguatan Bebas
Persamaan pada motor arus searah penguatan bebas berdasarkan gambar 2.10 adalah:
a a a t E I R
V = + ...(2-29)
f f f I R
V = ...(2-30)
II.6.2 Motor Arus Searah Penguatan Sendiri
Motor arus searah penguatan sendiri adalah motor arus searah yang penguatannya berasal dari motor itu sendiri. Dimana kumparan medan berhubungan langsung dengan kumparan jangkar. Kumparan medan dapat dihubungkan secara seri dan paralel dengan kumparan jangkar tergantung pada jenis penguatan yang diberikan terhadap motor.
Motor arus searah penguatan sendiri terdiri atas: 1. Motor arus searah penguatan seri
2. Motor arus searah penguatan shunt
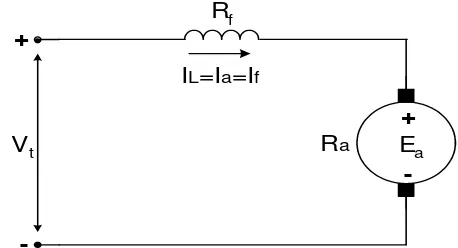
II.6.2.1 Motor Arus Searah Penguatan Seri
[image:36.595.196.425.170.294.2]Rangkaian ekivalen motor arus searah penguatan seri ditunjukkan pada gambar 2.11.
+
-Ea Vt
+
-Ra
Rf
IL=Ia=If
Gambar 2.11 Rangkaian Ekivalen Motor Arus Searah Penguatan Seri
Pada motor arus searah penguatan seri, kumparan medan (Rf) dihubungkan secara seri dengan kumparan jangkar (Ra). Oleh sebab itu, arus yang mengalir pada kumparan medan seri sama dengan arus yang mengalir pada kumparan jangkar. Persamaan pada motor arus searah penguatan seri berdasarkan gambar 2.11 adalah:
(
a f)
a a
t E I R R
V = + + ...(2-31)
f a
L I I
I = = ...(2-32)
II.6.2.2 Motor Arus Searah Penguatan Shunt
[image:36.595.204.452.630.733.2]Rangkaian ekivalen motor arus searah penguatan shunt ditunjukkan pada gambar 2.12
+
-Ea Rf
Vt
If IL
+
-Ia
Ra
Pada motor shunt kumparan medan (Rf) dihubungkan secara paralel dengan kumparan jangkar (Ra). Persamaan pada motor arus searah penguatan shunt berdasarkan gambar 2.12 adalah:
a a a t E I R
V = + ………(2-33)
f t f
R V
I = ………(2-34)
f a
L I I
I = + ………...………...…(2-35)
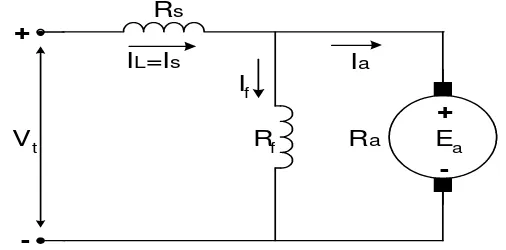
II.6.2.3 Motor Arus Searah Penguatan Kompon Pendek
Pada motor arus searah penguatan kompon pendek kumparan medan (Rf) dihubungkan seri dan paralel terhadap rangkaian jangkar (Ra). Rangkaian ekivalen motor arus searah penguatan kompon pendek adalah seperti gambar 2.13.
+ -Ea Rf Vt If + -Ia Ra Rs
IL=Is
[image:37.595.185.438.395.520.2]
Gambar 2.13 Rangkaian Ekivalen Motor Arus Searah Penguatan Kompon Pendek
Dari gambar 2.13 diatas, persamaan motor arus searah penguatan kompon pendek adalah: s s a a a
t E I R I R
V = + + ………(2-36)
f a s
L I I I
I = = + ………..(2-37)
f s s t f R R I V
II.6.2.4 Motor Arus Searah Penguatan Kompon Panjang
Rangkaian ekivalen motor arus searah penguatan kompon panjang ditunjukkan pada gambar 2.14.
+
-Ea Rf
Vt
If
+
-Ia
Ra
Rs
IL
Gambar 2.14 Rangkaian Ekivalen Motor Arus Searah Penguatan Kompon Panjang
Pada motor arus searah penguatan kompon panjang kumparan medannya juga dihubungkan seri dan paralel terhadap rangkaian jangkar. Persamaan pada motor arus searah penguatan panjang berdasarkan gambar 2.14 adalah:
s a a a a
t E I R I R
V = + + ...(2-39)
f a
L I I
I = + ...(2-40)
f t f
R V
I = ………..………...(2-41)
II.7 REAKSI JANGKAR
Reaksi jangkar merupakan pengaruh medan magnet yang disebabkan oleh mengalirnya arus jangkar, dimana jangkar tersebut berada didalam medan magnet. Reaksi jangkar menyebabkan terjadi dua hal, yaitu:
1. Demagnetisasi atau penurunan kerapatan fluksi medan utama 2. Magnetisasi silang
Apabila kumparan medan dialiri oleh arus listrik tetapi kumparan jangkar tidak dialiri oleh arus, maka dengan mengabaikan pengaruh celah udara, jalur fluksi ideal untuk kutub utama dari motor arus searah 2 kutub, berasal dari kutub utara menuju kutub selatan. Gambar 2.15 adalah fluksi yang dihasilkan oleh kumparan medan.
U
S
O FM
Bidang Netral Magnetis
Sikat
Gambar 2.15 Fluksi yang dihasilkan oleh kumparan medan
Dari gambar 2.15 diatas dapat dijelaskan bahwa:
• Fluksi didistribusikan simetris terhadap bidang netral magnetis.
• Sikat ditempatkan bertepatan dengan bidang netral magnetis.
terlihat pada gambar 2.15, sikat selalu ditempatkan disepanjang bidang netral magnetis, oleh karena itu bidang magnetis juga disebut sebagai sumbu komutasi karena pembalikan arah arus jangkar berada pada bidang tersebut. Vektor OFM mewakili besar dan arah dari fluksi medan utama, dimana vektor ini tegak lurus terhadap bidang netral magnetis. Sewaktu hanya konduktor jangkar saja yang dialiri arus listrik sementara kumparan medan tidak dieksitasi , maka di sekeliling konduktor jangkar timbul ggm atau fluksi. Gambaran arah garis gaya magnet ditunjukkan pada gambar 2.16.
U
S
Bidang Netral Magnetis
O
FA
Gambar 2.16 Fluksi yang dihasilkan kumparan jangkar
U
S
FM
FA O
Bidang netral magnetis baru
Bidang netral magnetis lama
F
ω
β
Gambar 2.17 Pembelokan fluksi karena interaksi fluksi medan dan fluksi jangkar
II.8 ALIRAN DAYA DAN RUGI-RUGI DAYA
Pada semua mesin listrik, daya masukan selalu lebih besar daripada daya keluaran. Perbedaan antara daya masukan dan keluaran disebut dengan rugi-rugi daya (losses). Rugi-rugi pada motor arus searah perlu diperhatikan karena rugi-rugi tersebut menimbulkan panas pada mesin sehingga dapat menaikkan temperatur mesin. Semakin besar rugi-rugi dayanya maka semakin besar pula suhu yang naik dimana hal ini dapat merusak isolasi pada mesin. Selain itu, rugi-rugi juga mempengaruhi efisiensi dari motor arus searah, karena losses mempengaruhi harga daya keluaran motor. Secara umum rugi-rugi pada motor arus searah terdiri dari 2 bagian, yaitu:
1. Rugi-rugi elektrik
a. Rugi-rugi tembaga (Pt)
Rugi-rugi tembaga adalah rugi-rugi yang terjadi pada belitan jangkar dan medan. Besar rugi-rugi jangkar:
a a a I R
P = 2 ...(2-42) sementara besar rugi-rugi medan:
f f
f I R
P = 2 ...(2-43) b. Rugi-rugi inti (Pi)
Rugi-rugi inti terdiri atas rugi-rugi histeresis dan rugi-rugi arus eddy (eddy current losses).
c. Rugi-rugi buta (Pb)
Pertambahan rugi-rugi besi tersebut disebabkan oleh distorsi atau cacat pada distribusi fluksi medan utama, ditambah dengan kenaikan rugi tembaga. Hal inilah yang disebut dengan rugi-rugi buta (stray load loss). Rugi-rugi buta tidak dapat ditentukan dengan akurat, oleh karena itu rugi-rugi ini dianggap selalu 1% dari daya keluaran mesin.
d. Rugi-rugi pada sikat
Rugi-rugi sikat adalah daya yang hilang pada sikat penyearah, karena jatuh tegangan pada kontak sikat tersebut, yang besarnya adalah:
a BD BD V I
P = ...(2-44)
2. Rugi-rugi mekanis (Pm)
Rugi-rugi mekanis adalah rugi-rugi yang disebabkan oleh efek mekanis. Rugi-rugi ini terdiri dari rugi-rugi gesekan dan rugi-rugi angin. Berikut ini adalah gambar aliran daya yang terdapat pada motor arus searah penguatan shunt.
L t in VI
P =
f f f I R
P = 2
a a a I R
P = 2 BD BD a
I V P = i P m P b P a a e E I
P =
a t in VI
P j =
out
P
Merupakan rugi- rugi tanpa beban, biasanya diasumsikan 3%- 6% daya keluaran
BAB III
PENGATURAN KECEPATAN MOTOR ARUS SEARAH
DENGAN MENGGUNAKAN SILICON CONTROLLED RECTIFIER
III.1 UMUM
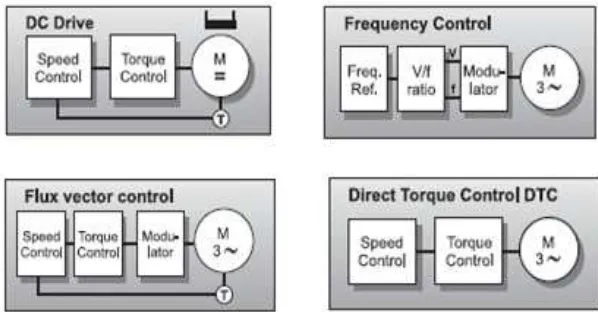
[image:44.595.159.458.556.712.2]Fungsi dasar penggerak pengatur kecepatan (variable speed drives) adalah mengendalikan aliran energi dari jala-jala ke mesin dalam proses produksi industri. Energi ini disulpai lewat poros motor. Dua besaran yang dapat diukur yang menunjukkan kondisi poros ini adalah torsi dan kecepatan. Untuk mengendalikan aliran energi maka besaran tersebut harus diatur. Dalam prakteknya, salah satu dari besaran ini harus diatur yang dikenal dengan pengatur torsi (torque controller) dan pengatur kecepatan (speed controller). Ketika variable speed drive sebagai pengatur torsi maka kecepatan motor tergantung dari beban. Sebaliknya, ketika beroperasi sebagai pengatur kecepatan maka torsi bergantung kepada beban. Penggerak pengatur kecepatan ini memiliki perbedaan dalam mengontrol setiap parameter yang sudah ada. Perbedaan ini dapat kita lihat pada gambar 3.1 berikut.
Pada awalnya, motor dc digunakan sebagai penggerak pengatur kecepatan (variable speed drive) karena torsi dan kecepatannya dapat dengan mudah diatur tanpa membutuhkan peralatan elektronika yang kompleks. Ada empat dasar pengaturan kecepatan motor arus searah dan masing-masing memiliki efektifitas yang berbeda-beda antara lain:
1. Mengontrol kumparan medan (field control), atau lebih spesifik lagi mengontrol fluks medan magnetik (field magnetic flux control).
2. Mengontrol tahanan kumparan jangkar (armature resistance control) atau mengontrol kecepatan dengan mengatur tegangan jangkar dengan menggunakan tahanan seri.
3. Mengontrol tahanan seri dan paralel pada kumparan jangkar (series and shunt armature resistance control, dimana menggunakan keduanya yaitu, seri dan paralel pada kumparan jangkar.
4. Mengontrol tegangan jangkar (armature voltage control), dimana menggunakan sumber tegangan yang dapat dikontrol pada kumparan jangkar.
III.2 KARAKTERISTIK DAN PRINSIP KERJA SCR
Thyristor merupakan salah satu tipe devais semikonduktor yang paling penting dan telah digunakan secara ekstensif pada rangkaian elektronika daya. Thyristor biasa digunakan sebagai saklar/bistabil, beroperasi antara keadaan non konduksi ke konduksi. Pada banyak aplikasi, thyristor dapat diasumsikan sebagai saklar ideal akan tetapi dalam prakteknya thyristor memiliki batasan dan karakteristik tertentu.
Silicon Controlled Rectifier (SCR) merupakan devais semikonduktor empat lapisan berstruktur pnpn dengan tiga pn-junction. Devais ini memiliki tiga terminal yaitu, anode, katode dan gerbang. Gambar 3.2 memperlihatkan simbol thyristor dan bagan dari tiga pn-junction. Thyristor dibuat melalui proses difusi.
Ketika tegangan anode dibuat lebih positif dibandingkan dengan tegangan katode, sambungan J1 dan J3 berada pada kondisi forward bias. Sambungan J2
berada pada kondisi reverse bias, dan akan mengalir arus bocor yang kecil antara anode ke katode. Pada kondisi ini, SCR dikatakan pada kondisi forward blocking atau kondisi off-state, dan arus bocor dikenal sebagai arus off-state ID. Jika
tegangan anode ke katode VAK ditingkatkan hingga suatu tegangan tertentu,
sambungan J2 akan bocor. Hal ini dikenal dengan avalanche breakdown dan
tegangan VAK tersebut dikenal sebagai forward breakdown voltage, VBO. Dan
karena J1 dan J3 sudah berada pada kondisi forward-bias maka akan terdapat
Pada keadaan on, arus anode dibatasi oleh resistansi atau impedansi luar, RL,
seperti terlihat pada gambar 3.2a. Arus anode harus lebih besar dari suatu nilai yang disebut latching current IL agar diperoleh cukup banyak aliran pembawa
muatan bebas yang melewati sambungan-sambungan; jika tidak devais akan kembali ke kondisi blocking ketika tegangan anode ke katode berkurang. Latching current ILadalah arus anode minimum yang diperlukan agar dapat membuat SCR
tetap pada kondisi hidup begitu suatu SCR telah dihidupkan dan sinyal gerbang dihilangkan. Karakteristik v-i umum dari suatu SCR diberikan pada gambar 3.3b.
Ketika berada pada kondisi on, SCR akan bertindak seperti diode yang tidak dapat dikontrol. Devais ini akan terus berada pada kondisi on karena tidak adanya lapisan deplesi pada sambungan J2 karena pembawa-pembawa muatan
yang bergerak bebas. Akan tetapi, jika arus maju anode berada dibawah suatu tingkatan yang disebut holding current IH, daerah deplesi akan terbentuk disekitar
J2 karena adanya pengurangan banyak pembawa muatan bebas dan SCR akan
berada pada keadaan blocking. Holding current terjadi pada orde milliamper dan lebih kecil dari latching current IL, IH > IL. Holding current IHadalah arus anode
minimum untuk mempertahankan SCR pada kondisi on.
Gambar 3.2 Simbol SCR dan tiga pn-junction
G A
K
G
Anoda
K A
J1
J2
J3
n
n p
p
RL
+
-VAK
K
iT
+
-A
Vs
(a) Rangkaian
Gambar 3.3 Rangkaian SCR dan karakteristik v - i
Ketika tegangan katode lebih positif dibandingkan dengan anode, sambungan J2 ter-forward bias, akan tetapi sambungan Ji dan J3 akan ter-reverse
bias. Hal ini seperti diode-diode yang terhubung secara seri dengan tegangan balik bagi keduanya. SCR akan berada pada kondisi reverse blocking dan arus bocor reverse dikenal sebagai reverse current IRakan mengalir melalui devais.
SCR akan dapat dihidupkan dengan meningkatkan tegangan maju VAK
diatas VBO akan tetapi kondisi ini bersifat merusak. Dalam prakteknya, tegangan
maju harus dipertahankan dibawah VBO dan SCR akan dihidupkan dengan
memberikan tegangan positip antara gerbang terhadap katode. Hal ini digambarkan pada gambar 3.2b dengan garis putus-putus. Begitu SCR dihidupkan dengan sinyal penggerbangan itu dan arus anodenya lebih besar dari arus holding, SCR akan terus berada pada kondisi tersambung secara positif balikan, bahkan bila sinyal penggerbangan dihilangkan sehingga SCR dapat dikategorikan sebagai devais latching.
[image:48.595.117.525.43.281.2]III.3 PENYEARAH TERKENDALI
Sebagaimana yang telah kita ketahui bahwa penyearah diode akan menghasilkan hanya tegangan keluaran yang tetap. Diode tidak digunakan untuk dapat menghasilkan tegangan keluaran yang terkendali melainkan pengendalian fasa thyristor. Tegangan keluaran penyearah thyristor bervariasi tergantung pada sudut penyalaan dari thyristor. Thyristor yang dikendalikan fasanya dinyalakan dengan memberikan suatu pulsa pendek pada gerbangnya dan dimatikan melalui komutasi natural atau komutasi line; dan pada kasus dengan beban yang sangat induktif, thyristor dimatikan dengan menyalakan thyristor lain pada setengah masa negatif tegangan masukan.
Penyearah thyristor fasa terkendali merupakan penyearah yang sangat sederhana dan lebih murah; dan efisiensi dari penyearah ini secara umum berada diatas 95%. Karena penyearah-penyearah ini mengkonversi dari tegangan ac ke dc, penyearah ini dikenal sebagai konverter ac-dc dan digunakan secara intensif pada aplikasi-aplikasi industri, terutama pada variable-speed drives, yang mencakup level daya dari fraksional tenaga kuda hingga megawatt.
menghasilkan tegangan dan arus keluaran berharga positif maupun negatif. Pada banyak aplikasi, konverter-konverter dapat dihubungkan secara seri agar dapat beroperasi pada tegangan yang lebih tinggi serta meningkatkan faktor daya masukan.
III.3.1 KONVERTER PENUH TIGA PHASA
Konverter tiga phasa secara ekstensif digunakan pada banyak aplikasi industri hingga level daya 120 kW dengan daerah operasi dua kuadran. Gambar 3.4a memperlihatkan rangkaian konverter penuh dengan beban yang sangat induktif. Rangkaian ini dikenal sebagai jembatan tiga phasa. Thyristor dinyalakan pada interval /3. Frekuensi ripple tegangan keluaran akan 6fs dan kebutuhan
proses filtering menjadi lebih ringan dari konverter gelombang setengah maupun semikonverter tiga phasa.
Pada = /6 + , thyristor T6 telah tersambung dan thyristor T1 akan
dinyalakan. Selama interval ( /6 + ) ( /2 + ), thyristor T1 dan T6
tersambung dan tegangan line-to-line vab ( = van - vbn ) akan muncul sepanjang
T1
T4
T3
T6
T5
T2
R L
+
-Vo
io = ia
Van
Vcn
Vbn
ia
ib
ic
b a
c
n
iT4
iT1
Jika tegangan line-to-neutral didefenisikan sebagai: van =Vm sin
vbn = Vm sin
− 3 2π ωt
vcn = Vm sin
+ 3 2π ωt
Tegangan line-to-line yang bersesuaian akan diperoleh sebagai:
vab = van - vbn = Vmsin
+ 6 π ωt
vab = van - vbn = Vmsin
− 2 π ωt
vab = van - vbn = Vmsin
+ 2 π ωt
Tegangan keluaran rata-rata diperoleh dari:
[image:52.595.187.369.601.728.2]∫
++ = π α α π ω π 2 / 6 / ) ( 3 t d v Vdc ab∫
++ + = π α α π ω π ω π 2 / 6 / ) ( 6 sin 3 3 t d t VVdc m
[image:53.595.187.467.86.227.2]) 1 3 ....( ... ... ... ... ... cos 3 3 − = α π m dc V V Tegangan keluaran rata-rata maksimum untuk sudut penyalaan, α = 0 adalah:
π m m
V V = 3 3
dan tegangan keluaran rata-rata ternormalisasi
) 2 3 ...( ... ... ... ... ... cos − = = α dm dc n V V V
Nilai rms dari tegangan keluaran akan diperoleh sebagai:
2 / 1 2 / 6 / 2 2 ) ( 6 sin 3 3 + =
∫
+ + α π α π ω π ωπ V t d t
Vrms m
) 3 3 .( ... ... ... 2 cos 4 3 3 2 1 3 2 / 1 − +
= Vm π α
Gambar 3.4b memperlihatkan bentuk gelombang untuk α = π/3. Untuk α > dari π/3, tegangan keluaran sesaat vo akan memiliki bagian negatif. Karena arus yang
melalui thyristor tidak dapat negatif, arus beban akan selalu positif. Akibatnya, dengan beban resistif, tegangan beban sesaat tidak dapat negatif dan konverter akan berperilaku sebagai semikonverter.
III.3.2 KONVERTER PENUH TIGA PHASA DENGAN BEBAN RL
vo = vab = + 6 sin
2 Vab ωt π untuk π +α ≤ω ≤ π +α
2
6 t
= 2 Vab sin ωt untuk π +α ≤ω ≤ π +α
2
6 t
dengan ωt + π/6, dan Vabadalah tegangan rms masukan line-to-line. Pemilihan vab
sebagai tegangan acuan waktu, arus beban iLdapat diperoleh dari:
Ri E V t dt
di
L L ab
L ω
sin 2
= +
+ untuk π +α ≤ω ≤ π +α
2
6 t
dengan solusi dari Persamaan (3-81) adalah
iL =
(
)
1 ( / )( /3 )3 sin 2
sin
2 π ω
θ α π θ
ω ab R L
L ab e Z V R E I R E t Z V − + − − + + − −
dengan Z =
[
R2+(ωL)2]
1/2 dan θ = tan−1(ωL/R).Pada keadaan tunak, 1'
' ' ) 3 / ( ) 3 / 2
( L L
L t i t I
i ω = π +α = ω =π +α = Penerapan kondisi ini ke Persamaan (5-62), diperoleh nilai IL1sebagai:
R E e e Z V
I R L
L R ab L − −− + − − +
= −( / )( /3 ) −
) 3 / )( / ( 1 1 ) 3 / ( sin ) 3 / 2 ( sin 2 ω π ω π θ π θ α
π untuk I
L1 ≥ 0
III.4 PENGATURAN KECEPATAN MOTOR ARUS SEARAH DENGAN
MENGGUNAKAN SCR
keluaran rata-rata dapat diubah-ubah. Konverter thyristor enam-pulsa tiga phasa kecuali diode digantikan dengan SCR, sesuai dengan gambar 3.5. Tegangan line-to-line yang sama dari tegangan tiga phasa digunakan sebagai sumber tenaga untuk konverter thyristor.
Edc
3-phase supply
1
3 2
T1
T4
T3
T6
T5
T2
R L
Rectifier mode
Inverter mode
+
- +
SCR dikenal juga sebagai devais unidirectional yang bekerja sangat sesuai dengan diode kecuali konduksi arah forward yang harus dipicu (triggered) oleh tegangan pulsa yang diberikan antara gerbang (+) dan katode (-). Sesudah konduksi terjadi dengan memicu tegangan pulsa, SCR akan melanjutkan untuk membawa hingga arus maju (forward) dibawah holding current, IH atau hingga SCR menjadi reverse bias.
Ketika SCR reverse bias, SCR menutup dan telah di pertukarkan tepatnya seperti diode.
ini dikarenakan SCR harus dipicu dengan rangkaian/urutan yang sama dengan diode dan dengan interval 60o. Thyristor akan dikomutasi secara natural, seperti diode dan jadi itu benar bahwa thyristor akan dikomutasi untuk interval dari 120o seperti diode.
Batas peralihan adalah waktu dimana thyristor T1 melalui T6 harus
dinyalakan untuk menghasilkan gelombang keluaran dari konverter diode enam-pulsa tiga phasa. Penundaan sudut penyalaan thyristor oleh suatu sudut penyalaan
, tegangan arus searah rata-rata dapat diturunkan dari maksimum (0,995 Emax)
turun melalui 0 Volt sampai ke tegangan maksimum negative (-0,955 Emax). Yang
dapat dibuktikan secara matematis untuk tiga phasa, konverter thyristor six-pulse: Edc = 0,955 Emax cos
Ketika = 0o, Edc maksimum didapat (cos 0o = +1.0), dan bertambah melebihi
0o, nilai Edc akan menurun sampai = 90o, dimana waktu cos = 0 dan Edc = 0.
Jika melebihi = 90o cos bernilai negatif sehingga Edc adalah negatif sampai
maksimum negatif dari cos 180o = - 1.0 atau tegangan Edc yang terjadi adalah Edc
= - 0,955 Emax.
Gambar 3.5 menunjukkan konfigurasi rangkaian konverter thyristor enam-pulsa tiga phasa dalam mode penyearahan dengan beban resistansi, R, terhubung seri dengan induktansi yang sangat besar dan rata, L. Dengan penundaan sudut penyalaan saat = 0o, gelombang yang dihasilkan dapat dilihat pada gambar 3.5b. Catatan bahwa perintah penyalaan thyristor akibat thyristor T1
sampai T6 dengan kenaikan 60o tegangan phasa ke phasa diantara setiap
penyalaannya.
Gambar 3.5c dan 3.5d menunjukkan bentuk gelombang tegangan keluaran dalam penundaan sudut penyalaan berturut-turut dari 30o dan 60o. Hal itu menunjukkan tegangan dc rata-rata Edc masing-masing adalah 143,1 Volt dan 82,6
Volt, dengan Emax = 173 Volt. Lagi, dengan mengubah sudut tunda penyalaan, ,
dengan besar Edc dikendalikan. Frekuensi ripple, fR, tidak mengubah tetapi besar
tegangan ripple puncak ke puncak ERp-p, kenaikan Edcdikurangi.
Batas kritis yang terjadi saat = 90o ditunjukkan seperti pada gambar 3.5e, dimana Edc = 0. Bentuk gelombang keluarannya terlihat berbentuk segitiga,
seperti bentuk gelombang tegangan bolak-balik dengan tegangan ripple peak-to-peak, ERp-p = Emax = 150 Volt. Gambaran dari tegangan maksimum peak-to-peak
mungkin dipicu dengan konverter thyristor enam-pulsa tiga phasa.
Diluar sudut tunda penyalaan 90o, bentuk gelombang keluaran dan Edc
adalah negatif, hal ini dapat dilihat pada gambar 3.5f, dengan = 120o. Tegangan dc rata-rata dapat dihitung dengan:
Edc = 0,955 Emaxcos
Edc = 0,955 (173) cos 120o
Jadi, tegangan negatif dihasilkan dikeluaran konverter ketika mode inverter (+Edc
sekarang adalah dasar), hal itu akan jelas bila arus akan menjaga aliran ke beban. (Ketika suatu sumber tegangan diberikan, arus meninggalkan terminal positif dan kembali ke terminal negatif). Dalam kasus ini, meskipun arus tidak dapat mengalir keluar dari positif ke negatif karena adanya thyristor. SCR tidak akan membiarkan arus mengalir dari katode ke anode dalam hubungan reverse, sesuai dengan hokum Ohm’s bahwa arus harus mengalir melalui suatu beban karena kehadiran tegangan Edc yang mengalir melalui beban. Untuk melihat kenyataan kontradiksi
ini, suatu sumber tegangan harus dihubungkan seri dengan beban resintansi dan induktansi saat konverter dalam mode inverter. Sumber tegangan harus juga dihubungkan secara seri melawan polaritas Edc. Jika tidak, kondisi jatuh reverse
mudah terjadi.
Edc
3-phase supply
T4
R L
+
-T1
T6
T3
T2
T5 Ec
VRL
+
-Gambar 3.6 Konverter thyristor enam-pulsa tiga phasa mode inverter dengan beban “aktif”
Gambar 3.6 diatas menggambarkan konverter thyristor enam-pulsa seperti gambar 3.5 tentang operasi suatu inverter. Itu terjadi dengan dibalik jadi +Edc pada
saat beban puncak untuk waktu yang ada dan dengan ditambah beban “aktif”, Ec
[image:59.595.115.522.417.580.2]diswitch oleh sebuah saklar elektronik. Catatan bahwa polaritas dari Ec
berlawanan.
Jika Edc lebih besar dari nilai Ec, arus akan mengalir dari sumber tegangan
tiga phasa melalui thyristor (T4, T6, atau T2) dan meninggalkan terminal positif Edc. Lagi, ini tidak dapat terjadi karena thyristor tidak akan melewatkan arus
hubungan negatif dari katode ke anode. Karena itu, Ec harus sama besar atau lebih
besar dari Edc dibawah operasi normal inverter untuk mengalirkan arus. Dengan
asumsi bahwa Ec Edc, rangkaian yang diperlihatkan seperti gambar 3.6 dapat
digantikan dengan suatu rangkaian ekivalen seperti pada gambar 3.7.
Ec +
-+
-R L Closed
Closed
T1, T3 or T5
T4, T6 or T2
T1, T3 or T5
Edc
Idc
Gambar 3.7 Rangkaian ekivalen konverter thyristor enam-pulsa tiga phasa-mode inverter
Asumsikan Edc adalah konstan karena sudut tunda penyalaan telah
ditentukan dan Ec adalah tegangan yang besarnya agak lebih besar dari Edc.
Sehingga Ec lebih besar dari Edc, arus Idc akan mengalir ke terminal positif dari Ec
dan memasuki terminal positif dari Edc seperti ditunjukkan pada gambar 3.7. Hal
ini diizinkan karena arus akan mengalir melalui SCR dari anode ke katode, dan Edc dibias forward oleh thyristor seperti dinyatakan gambar 3.6. Akibatnya, Ec
mengalirkan arus ke Edc, atau dalam istilah umum, “beban” diberikan sumber
tegangan. Asumsikan bahwa induktansi L sangat besar dengan sebuah resistansi dc nol ohm, dan arus Idc, dapat ditunjukkan dengan rumus pendekatan yaitu:
R E E
I c dc
dc
− =
Dimana daya diberikan ke sumber tegangan Edc dengan beban aktif Ec adalah:
dc dc
l E I
P = .
Daya Pl diterima oleh sumber tegangan tiga phasa melalui suatu thyristor seperti
[image:61.595.116.508.419.619.2]rangkaian sudut tunda penyalaan yang konstan . Daya tersebut diserap dalam sumber tiga phasa sinusoidal, dan jika sebuah transformator digunakan, hal itu digambarkan kedalam suatu sumber dari kumparan primer dimana dapat digunakan secara efektif disegala tempat untuk berbagai beban.
Gambar 3.8 Diagram blok kontrol
Meskipun mode operasinya kelihatan sederhana, kemampuan motor yang dibutuhkan jelas bergantung kepada sistem pengaturan. Diagram blok pada gambar 3.8 menunjukkan komponen dasar sistem pengaturan yang terdiri dari thyristor, sumber pemicu dan transducer. Inti operasi sumber pemicu terletak
Trigger source Motor Thyristors Transducers Controlled power Feedback signals Maximum limits Controlled variable setpoints Raw power input Actual speed, T, Ia etc.
Shaft output Trigger
pada sebuah mikroprosesor berbagai tipe. Mikroprosesor diprogram oleh operator dengan besar kecepatan, torsi, dan berbagai variabel lainnya yang sesuai dengan kebutuhan, atau disebut dengan pengaturan setpoint variable. Batas nilai maksimum juga diprogram kedalam suatu prosesor untuk besaran arus, torsi, dan juga untuk suatu sistem proteksi. Akhirnya, transducer dengan seketika mengukur kecepatan motor aktual, arus, torsi dan sinyal yang dikirimkan kembali ke prosesor. Sinyal ini dibandingkan dengan variabel besaran yang telah ditentukan menggunakan prosesor elektronik. Jika ada perbedaan, seperti contoh kecepatan aktual dan kecepatan setpoint, sudut tunda penyalaan , secara elektronik dan otomatis diubah oleh prosesor sehingga kecepatan aktual mengubah dan sama dengan besar setpoint. Jika kecepatan motor bertambah melebihi batas maksimum setelan karena kesalahan operator atau fungsi, motor secara otomatis akan mati. Rangkaian sama dari peristiwa yang juga terjadi untuk keluaran yang dipantau seperti torsi, arus, dan lain-lain.
Konverter thyristor enam-pulsa tiga phasa digunakan untuk mengatur kecepatan dan biasa digunakan untuk motor dc shunt penguatan terpisah seperti pada gambar 3.9. Rangkaian jangkar terdiri dari tahanan jangkar, Ra, induktansi
La, dan generator yang menunjukkan tegangan lawan yang dihasilkan dari aksi
generator dari motor, Ec. Induktor yang smooth, Lx, termasuk untuk meratakan
arus jangkar, meskipun jika induktansi jangkar, La, cukup besar, Lx dapat
Ec
3-phase supply
Ra La
Current flow only from anode to cathode
+
-+
-Lx
Va
To trigger circuit
Sense resistor
Rf
Lf
Fixed dc output
1Φ Φ
[image:63.595.115.518.83.314.2]Ia
Gambar 3.9 Konverter thyristor enam-pulsa tiga phasa kontrol motor
Ketika motor dinyalakan, mikroprosesor dengan segera mulai memicu SCR dengan sudut penyalaan = 90o. Hal ini dinyatakan dalam persamaan:
Edc = 0,955 Emax cos
dimana: Va = Edc = 0,955 Emaxcos 90o
jadi: Va= 0 Volt
Itu jelas bahwa saat motor dinyalakan, arus rata-rata jangkar adalah nol ampere karena tidak ada tegangan yang diberikan, dan tidak ada tegangan lawan, Ec, karena kumparan jangkar ujung perhentian. Kepekaan ini dirasakan kembali
oleh transducer, sumber pemicu menurunkan sudut tunda penyalaan dan tegangan jangkar, Va, menjadi positif dan arus jangkar mengalir. Arus ini mengalir ke
mesin bekerja, arus jangkar dimonitor oleh tahanan yang sensitive yang dihubungkan seri dengan kumparan jangkar. Jika arus jangkar melebihi 150 persen dari batas/dasar yang telah ditetapkan selama berputar, sumber pemicu akan menaikkan sampai lebih kurang dapat diterima aliran arus Ia (dibawah 150
persen dari dasarnya) sehingga motor menjadi sesuai dengan kecepatan dasarnya, dan sudut tunda penyalaannya mendekati 20o. Hal ini berkaitan dengan desain sudut tunda minimum karena aliran tiga phasa yang berfluktuasi dapat mengakibatkan masalah switching tiba-tiba jika sudut tunda yang kecil digunakan.
Ketika mesin sedang berputar pada kecepatan dasar, mikroprosesor sumber pemicu menjaga sudut tunda penyalaan yang dibutuhkan tetap karena umpan balik dan besar setelan sinyal harus sesuai. Jika kecepatan rendah, maka oleh operator atau remote, sumber pemicu menaikkan sudut tunda penyalaan dimana menurunkan keluaran konverternya, jadi Va menjadi lebih kecil
dibandingkan Ec. Sehingga sekarang Ec lebih besar dari Va, arus akan menjaga Ec
mengalir keluar dan ke dalam konverter, tetapi ini tidak dapat mengalir kedalam katode pada SCR. Sebagai akibat, arus jangkar mengalir dan motor akan berputar lambat karena tidak adanya torsi. Kecepatannya akan lambat bergantung pada inersia beban dan faktor lainnya.
Saat kecepatan motor turun, motor berperan sebagai generator karena tegangan Ec lebih besar dibandingkan tegangan keluaran konverter, Va. Ketika Ec
mengurangi kecepatan putaran batang, nilai yang dicapai dimana Ec menjadi lebih
kecil dibandingkan Va dan arus jangkar kembali mengalir dari konverter ke motor.
Ketika operator atau remote pengatur memerintahkan untuk menaikkan kecepatan dari yang lebih kecil dibandingkan kecepatan saat steady-state, proses yang sama terjadi. Perintah tersebut diprogram kembali kecepatannya oleh sumber pemicu dan dengan segera ada perbedaan antara umpan balik dan sinyal setpoint. Sekarang sumber pemicu mulai menurunkan sudut tunda penyalaan sehingga tegangan Va bertambah besar dan hasilnya berupa putaran motor. Perubahan ini
terus berlangsung sampai setpoint dan sinyal umpan balik sama besarnya, dimana waktu sudut tunda penyalaan dijaga dalam keadaan steady-state.
Ketika terjadi penurunan kecepatan motor sedang dalam perkembangan, motor cenderung sebagai generator. Setelah itu, ketika Va dikurangi dibawah Ec,
motor tidak menghasilkan torsi karena arus jangkar berhenti mengalir. Bagaimanapun, beban yang berputar telah menyimpan energi dalam bentuk inersia selama periode motor memberikan energi kembali dengan mengerakkan batangan motor sampai energi dihabiskan. Energi mekanik yang disimpan ini tidak diubah ke energi listrik seperti kecepatan shaft menurun tetapi lebih baik dihilangkan bentuk pergeseran secara mekanis, rugi-rugi belitan dan mungkin gerak/gaya terakhir yang digunakan dalam bekerja. ”Garis dasar” dari situasi ini merupakan suatu rugi-rugi daya dan pastinya, suatu efesiensi yang rendah. Tambahan pula, itu mungkin membutuhkan waktu yang tidak dapat diterima untuk membuat shaft berputar dengan kecepatan rendah.
generator.Metode ini sering digunakan untuk mengendalikan waktu yang dibutuhkan dalam mengubah-ubah kecepatan tetapi metode ini tidak memperbaiki efisiensi suatu operasi. Pengereman regeneratif memberikan perbaikan efisiensi dengan pengaturan pengurangan kecepatan meskipun pada permulaannya lebih mahal dan seperti yang kelihatan sekarang.
Konverter thyristor seperti yang terlihat pada gambar 3.9 telah digunakan dalam mode penyearah. Oleh karena itu, tegangan keluaran, Va, menjadi positif
sebagai hasil dari pengaturan sumber pemicu sudut tunda penyalaan antara 90o hingga 20o. Ketika sumber pemicu menunda sudut penyalaan melebihi 90o meskipun polaritas Va menjadi negatif dan konverter dikatakan menjadi mode
inverter. Hanya, pembalikan polaritas konverter ini seperti pada gambar 9-15 mengakibatkan tidak menghasilkan regenerasi karena arus tidak dapat mengalir ke katode SCR dari konverter. Jika polaritas jangkar di switch dalam keadaan konverter yang menjadi mode inverter, regenerasi mungkin terjadi meskipun rangkaian dikontrol secara hati-hati dan diprogram kedalam sumber pemicu. Pertama, sebuah “panggilan” untuk pengurangan kecepatan diajukan, dan sumber pemicu seperti biasa menaikkan sudut tunda penyalaan sehingga Va turun sampai
dibawah Ec, dimana aliran arus jangkar berhenti. Sumber pemicu menerima
informasi karena transducer memantau Ia dan Va. Sumber pemicu sekarang
menunda pulsa penyalaan melebihi 90o sehingga Va menjadi negatif dan besarnya
agak kecil dibandingkan Ec. Saklar daya kecepatan tinggi kemudian diaktifkan
Ketika Ec menjadi lebih kecil dibandingkan dengan Va, arus jangkar berhenti
BAB IV
PENGATURAN KECEPATAN MOTOR ARUS SEARAH DENGAN
MENGGUNAKAN SILICON CONTROLLED RECTIFIER PADA
SECTIONAL DC DRIVES PULP MACHINE
IV.1 UMUM
Dalam industri pembuatan bubur kertas (pulp) di PT. Toba Pulp Lestari, Tbk, pengaturan motor listrik merupakan suatu hal yang sangat diperhatikan, karena hal ini sangat berkaitan dengan produktifitas industri tersebut. Pengaturan kecepatan motor ini dilakukan dengan mengatur kecepatan putaran motor yang bervariasi sesuai tingkatan kebutuhan industri dengan menggunakan variable speed drives.
Secara umum variable speed drives terdiri atas:
• AC Drives (drive untukmotor arus bolak-balik)
• DC Drives (drive untuk motor arus searah)
IV.2 SECTIONAL PULP MACHINE’S DC DRIVES
Seiring dengan kemajuan teknologi di bidang elektronika daya,
mikroprosessor dan elektronik digital, tipe electrical drive system sekarang lebih
efisien, lebih murah, lebih serbaguna seperti yang ditunjukkan pada gambar 4.1. Tegangan dan arus diberikan ke motor dan kemudian akan diubah oleh konverter
elektronika daya (power electronic converter). Prosessor digerakkan oleh suatu
pengontrol dengan sebuah feed back yang dinyatakan dari motor oleh prosessor ke
unit kontrol elekt