UNIVERSITI TEKNIKAL MALAYSIA MELAKA
Conceptual and Mechanical Design of
Master-Slave Robot for Painting Application
Thesis submitted in accordance with the partial requirements of the
Universiti Teknikal Malaysia Melaka for the
Bachelor of Manufacturing Engineering (Manufacturing Robotic and Automation)
By
Hairul Anuar bin Mohd Yusof
B050310006
Faculty of Manufacturing Engineering
JUDUL: ________________________________________________________________ ________________________________________________________________ ________________________________________________________________ SESI PENGAJIAN : _______________________
Saya ________________________________________________mengaku membenarkan tesis (Sarjana Muda/Sarjana/Doktor Falsafah) ini disimpan di Perpustakaan Universiti Teknikal Malaysia Melaka (UTeM) dengan
Syarat-syarat kegunaan seperti berikut:
1. Tesis adalah hak milik Universiti Teknikal Malaysia Melaka.
2. Perpustakaan Universiti Teknikal Malaysia Melaka dibenarkan membuat salinan untuk tujuan pengajian sahaja.
3. Perpustakaan dibenarkan membuat salinan tesis ini sebagai bahan pertukaran antara institusi pengajian tinggi.
**Sila tandakan (X)
i
APPROVAL
This thesis submitted to the senate of UTeM and has been accepted as partial fulfillment of the requirements for the degree of Bachelor of Manufacturing Engineering (Manufacturing Robotic and Automation). The members of the supervisory committee
are as follow:
……….
Main Supervisor En Mohd Samsi bin Saad Faculty of Manufacturing Engineering
(Official Stamp & Date)
………
Second Supervisor En.
DECLARATION
I hereby, declare this thesis entitled “Mechanical Design for master slave (parent-child) robot for painting application” is the result of my own research
except as cited in the references.
Signature : ……….
Author’s Name : ……….
iii
DEDICATION
ACKNOWLEDGEMENTS
The contributions of En Mohd Samsi bin Saad, of the UNIVERSITI TEKNIKAL MALAYSIA MELAKA (UTeM) merits special acknowledgment for this excellent and careful review of the entire text and project. En Mohd Samsi has inspected the structure of every sentence and where necessary, has made modifications so that the project is clear, direct, concise, and friendly. He has carefully modified the heading structure of every sentence in order to make the text more easily readable and reorganized the project section especially my part of this project so that the student can efficiently survey what has be presented. En Samsi has worked under a number of constraints and has done so in a friendly and timely manner.
Special recognition is again due to my friend, formerly of Robotic and Automation, for them continuing contribution in the form of invaluable suggestions and accurate idea and checking of this project. In addition to these individual, I wishes to thank the members that who responded to a questionnaire concerning these project. Also thanks to UTeM staff especially Manufacturing Department that given approval to this project.
v
ABSTRACT
In 1920, robotic be found when Czechoslovakian playwright Karel Capek introduces the word robot in the play R.U.R. - Rossum's Universal Robots. The word comes from the Czech robota, which means tedious labor. In 1938, the first programmable paint-spraying mechanism is designed by Americans Willard Pollard and Harold Roselund for the DeVilbiss Company. In 1951, in France, Raymond Goertz designs the first tele-operated articulated arm for the Atomic Energy Commission. The design is based entirely on mechanical coupling between the master and slave arms (using steel cables and pulleys). Derivatives of this design are still seen in places where handling of small nuclear samples is required. This is generally regarded as the major milestone in force feedback technology. The main function of a master slave arm for a painting application is to paint some part that difficult to paint. Why robot arm are useful for painting is because the painting itself can be hazardous for human. The design of the arm robot can paint some other part by using arm robot and controlled by using master arm robot. Every movement can be controlled by master arm robot. Effectiveness of the proposed method is confirmed by experiments using a developed three-axis master-slave arm system. In this project, it was specially focused and involves in Conceptual and Mechanical design of Master Slave Robot for Painting Application that to design and choose the best of arm robot that will be build for prototyped. The proposed arm master system consists of a self-contained computing hardware with a potential motors at each arm joints. The purpose of this master unit is to measure the angular position of the
joints of the user’s arm. These angular positions are transmitted, as voltages, to the
TABLE OF CONTENTS
1.1 Background of Project 5
1.2 Problem Statements 6
1.3 Objectives of the Research 7
1.5 Scope and Limitation 8
vii
CHAPTER 3
3.0 METHODOLOGY 15
3.1 Design the robot 15
3.2 Robot Modules and Parameter 16
3.2.1 Forward Kinematics 16
3.2.2 Inverse Kinematics 17
3.2.3 Dynamic 18
3.3 Speed Considerations 19
3.3.1 Types of Inputs 19
3.3.2 Desired Frequency of the Control system 20
3.3.3 Error Analysis 20
3.4 Optimal Design of Robot Manipulator 21
3.5 Special Computer Architecture for Robotic 22
3.6.1 Design Issues 22
3.6.2 Master Slave Robot Manipulator 22
3.6.2.1 Analysis Stage 22
3.6.2.2 Controller Design 23
3.7 The Optimal Design 24
3.7.1 Constructing the Optimization Problem 24
3.7.1.1 Structural Length Index 25
CHAPTER 4
4.5.1.1 Design Consideration 41
4.5.1.2 Design 1 41
4.6 Material Selection 51
ix
5.2 Process Analysis 63
5.2.1 Calculations 63
5.3 Discussion 68
5.3.1 Problem Occurs 68
5.3.2 Solution 69
5.3.3 Overall Process 70
5.4 Robotic Sprayer 71
5.5 Conclusions 72
5.6 Contribution 73
5.7 Others Applications 73
REFERENCES 74
APPENDICES 78
1. Gantt Chart 79
LIST OF FIGURES
CHAPTER 1
1.1 Conceptual figure of systems 2
1.2 The interaction between the members activity 4
CHAPTER 2
2.1Robot Arm Design Configuration 11
2.2Arm Robot 13
CHAPTER 3
3.1Kinematics Analysis 17
3.2Three different configurations of the robot manipulator 23
3.3The optimal design cycle (interfaces) 26
3.4Flow chart for mechanical design 27
3.5Articulated Arm Robot 28
3.6 SCARA Robot 29
3.7 Arm Robot 30
CHAPTER 4
4.1Master slave working flow 34
4.2Slave Arm 35
4.3Master Arm 37
4.4Mapping the joints of a human hand 37
4.5The Conceptual of Master Slave Robot 38
4.6Design 1 42
4.6.1 Link member 1 43
4.6.2 Link member 2 43
xi
4.8.1 Cross section of middle part of arm member 49
4.8.2 Cross section of end part of arm member 49
4.8.3 Back View Of Arm Member 1 49
CHAPTER 5
5.1 Final design
5.1.1 The Final Design 53
5.1.2 The Final Design In Different View 54
5.1.3 The Conceptual Design 55
5.1.4 The Different View Of Design Of Base Arm Robot 55
5.2 Mechanical design for base arm robot 56
5.3 The dimension of base 57
5.4 The dimension of stand upper stands, and stands 2 58
5.5 The dimension of support the base 58
5.6 The arm robot 59
5.7 First arm robot 59
5.8 Second arm robot 60
5.9 Types of servo motor 60
5.10 The different view prototypes of master robot 61
5.11 Limit switch placed in master Robot 62
5.12 The Dimension Of Master Robot 62
LIST OF TABLES
CHAPTER 1
1.1 The different between Master and Slave Arm Robot 8
CHAPTER 4
4.1 System feature in Master Salve Arm Robot 33
4.2 Types of Material Selection 51
4.3 Types of Aluminum 51
xiii
LIST OF APPENDICES
CHAPTER 1
INTRODUCTION
1.0 INTRODUCTION
In the master-slave control, the slave robot (teleoperator) exactly replicates the movements of the master robot. Master slave robot is technology for tele-operation using master-slave robot systems in the field of medical, welfare, extreme-environment, space-environment and virtual reality. Many sophisticated master-slave robot systems have been proposed. Some of them are already commercialized. For example, PHANT oM by SensAble Technologies is a device for measuring six degrees of freedom motion of an arm and, at the same time, giving a force feedback of three axes, which is usually used for the input devise for virtual reality and for the master robot for the telerobotics. Da Vinci by Intuitive Surgical is a surgical master-slave robot system having two fingers on two arms and can realize highly dexterous manipulation.
2
coupling between the master and slave arms (using steel cables and pulleys). Derivatives of this design are still seen in places where handling of small nuclear samples is required. This is generally regarded as the major milestone in force feedback technology. Although the system has advantage to have simple mechanism and controller, it has disadvantage not to have force feedback needed for dexterous manipulation. The latter is to apply a force feedback control electrically.
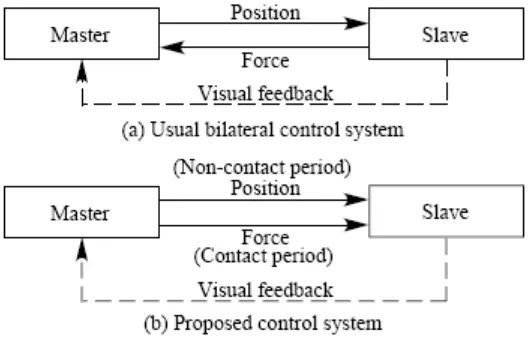
Conceptual figure of the bilateral system is shown in Fig. 1.1(a). Although the mechanism and controller become complicated, dexterous manipulation can be conducted using the bilateral one. Conceptual figure of proposed methodology is shown in Fig. 1.1(b). Large and stable stationary limiting torque can be applied by use of the ultrasonic motor because it is a frictionally driven motor and need no electric power to keep it stationary. So the ultrasonic motor is suitable for the switching element because it can make the master arm stationary when the slave arm is in contact with an object. Mechanical clutch is also suitable for the switching element. The force feedback to the operator is applied mechanically as an elastic force of the elastic elements instead of electrical feedback control. This method also utilizes a feature of human factor that is displacement information from visual feedback is superior to that from one’s sensation. Lightweight and well-controlled master-slave robot can be supplied using the proposed method.
In designing and building a robot manipulator, many tasks are required, starting with specifying the tasks and performance requirements, determining the robot configuration and parameters that are most suitable for the required tasks, ordering the parts and assembling the robot, developing the necessary software and hardware components (controller, simulator, monitor), and finally, testing the robot and measuring its performance.
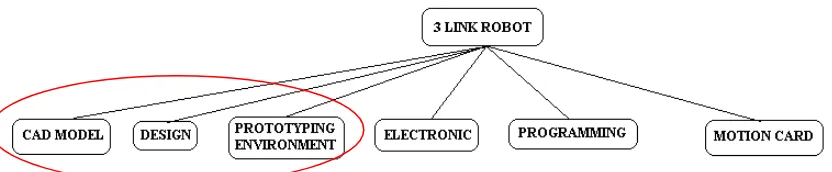
Our goal is to build a framework for optimal and flexible design of robot manipulators with software and hardware systems and modules which are independent of the design parameters and which can be used for different configurations and varying parameters. This environment is composed of several subsystems. Some of these subsystems are:
Design.
Physical assembly and testing.
4
Figure 1.2: The interaction involved in the prototyping activity.
1.1 Background of Project
The main purpose of this project master slave robot is to communicate between master and slave robot. The main objective is when master robot gives some movement and slave robot follows the movement. The other function of a master slave arm is a painting application is to paint some part that difficult to paint. For this project, we design that we can paint some other part by using arm robot and controlled by using master arm robot. Purpose of this master slave robot is to remove human from hazardous like painting. The material in painting is hazardous to human health. So this master slave robot is more useful when work that are harmful to human well being. Human can use master robot to conduct the slave robot to follow what are being commands. For this prototype, there are using 3 axis movements because depend on calculate the cost, stability, knowledge and design we take to make this project complete. Mostly, the painting application has large proportion in automotive painting works in automation industry, robotic painting application widely used to painting the mostly products like car. The development of master slave painting robot is regarded as a highly developed production technology which requires a concentration of potentials of global technologies such as CAD/CAM, robots, electronic and electrical, mechanical and IT.
6
1.2 Problem Statement
The first main idea of this project is from first robot having been built. Although master slave robot are long been used in manufacturing, not many people know the function of master slave robot itself. Then we apply the master slave robot function to develop this idea in painting application. Mostly, there are a lot of methods that have been used by industry in painting application. There are using arm robot that only programmable in computer and then the robot follow the programmable of the movement in program. By using arm robot mater slave painting, we can painting the part that we need that can’t be done by programming.
1.3 Objectives
The objective of this research project is to explore the basis for a consistent software and hardware environment, and a flexible framework that enables easy and fast modifications, and optimal design of robot manipulator parameters, with online control, monitoring, and simulation for the chosen manipulator parameters. This environment should provide a mechanism to define design objects that describe aspects of design, and the relations between those objects.
For this project, we separate painting application and arm robot. We more focus on about arm robot first and for the painting application, we take some different programmable control. Another goal is to build a prototype of painting system arm robot that is part of our project. In other part, we analyze the system of circuit and programmable that painting need. This will help determine the required subsystems and interfaces to build the prototyping environment, and will give us hands-on experience for the real problems and difficulties that we would like to address and solve using this environment.
The importance of this project arises from several points:
This framework will facilitate and speed the design process of robots.
The prototype robot will be used as an educational tool in the robotics and automatic control classes.
8
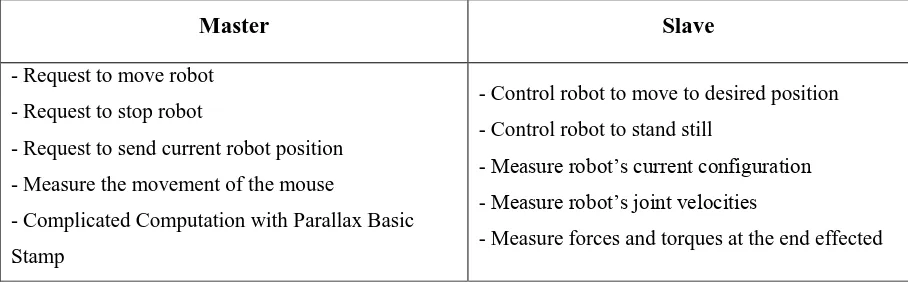
Table 1.1: The different between Master and Slave Arm Robot
Master Slave
- Request to move robot
- Request to stop robot
- Request to send current robot position
- Measure the movement of the mouse
- Complicated Computation with Parallax Basic
Stamp
- Control robot to move to desired position
- Control robot to stand still
- Measure robot’s current configuration
- Measure robot’s joint velocities
- Measure forces and torques at the end effected
1.4 Scope and limitation
Developing structure analysis for the conceptual design of the master slave robot arm for painting application.
Developing the requirement for the structure due to the completion of the prototype.
CHAPTER 2
LITERATURE REVIEW
2.1 What are robots?
A robot is an electro-mechanical device that can perform autonomous or preprogrammed tasks. A robot may act under the direct control of a human (e.g. the robotic arm of the space shuttle) or autonomously under the control of a programmed computer. Robots may be used to perform tasks that are too dangerous or difficult for humans to implement directly (e.g. nuclear waste clean up) or may be used to automate repetitive tasks that can be performed with more precision by a robot than by the employment of a human (e.g. automobile production.) autonomous vehicles), manipulator robots (e.g. industrial robots) and self reconfigurable robots, which can conform themselves to the task at hand.