i
PERSETUJUAN
Judul : Pengendalian Pintu Air Jarak Jauh Menggunakan SistemAndroidVia JaringanWi-Fi
Kategori : Skripsi
Nama : Gunawan Basri Sitorus
Nomor Induk Mahasiswa : 100801073
Program Studi : Sarjana (S1) Fisika
Departemen : Fisika
Fakultas : Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara
Disetujui di Medan, Agustus 2014
Komisi Pembimbing :
Pembimbing 2, Pembimbing 1,
Dr.Bisman Perangin-angin M.Eng.Sc Dr.Marhaposan Situmorang NIP. 195609181985031002 NIP. 195510301980031003
Disetujui Oleh
Departemen Fisika FMIPA USU Ketua,
ii
PERNYATAAN
PENGENDALIAN PINTU AIR JARAK JAUH MENGGUNAKAN SISTEM
ANDROIDVIA JARINGANWI–FI
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri. Kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Agustus 2014
iii
PENGHARGAAN
Puji dan syukur penulis ucapkan kepada Tuhan Yesus Kristus atas berkat-Nya penulis dapat menyelesaikan skripsi dengan judul “PENGENDALIAN PINTU AIR JARAK JAUH MENGGUNAKAN SISTEM ANDROID VIA
JARINGAN WI – FI ” yang disusun sebagai syarat untuk mendapatkan gelar
sarjana di Universitas Sumatera Utara.
Penulis juga mengucapkan terima kasih kepada :
1. Bapak Dr.Marhaposan Situmorang dan Bapak Dr.Bisman Perangin-angin M.Eng.Sc sebagai Dosen pembimbing saya dalam menyelesaikan tugas akhir saya. Terima kasih atas semangat, bimbingan, dukungan dan doa dari Bapak.
2. Bapak Dr.Marhaposan Situmorang selaku Ketua Jurusan Departemen Fisika, Bapak Drs.Syahrul Humaidi M.Sc selaku sekertaris jurusan Departemen Fisika.
3. Bapak Dekan USU Bapak Dr.Sutarman M.Sc beserta seluruh Civitas Akademika FMIPA USU.
4. Kepada Kedua Orang tua saya yang tercinta (Ayahanda G. Sitorus dan Ibunda P. Br Silaen) atas cinta kasihnya, bimbingannya, dukunganya serta doanya sehingga perkuliahan dan tugas akhir saya dapat selesai dengan baik.
5. Kepada keluarga Abang Artha Sitorus, keluarga Lae Putri Siregar, keluarga Lae Jeremy Simamora, dan Keluara Bang Chandra Sitorus serta kakak Junika Sitorus terima kasih atas semangat, cinta, dukungan serta materi selama saya menyelesaikan perkuliahan di jurusan Fisika USU. 6. Kepada seluruh keluarga Op. Hendrita Sitorus terima kasih atas cintanya. 7. Kepada seluruh keluarga Op. Rame Silaen terima kasih atas cintanya. 8. Yudi Andrian atas bantuan dalam perancangan alat dan masukan dalam
iv
9. Kepada sahabat-sahabat tercinta Ponti Barimbing, Wiwi Silaen, Dewi Paskah Sibuea, Edwin Reynaldo Pasaribu, Irmandes Tambunan, Dedi Situmorang, terima kasih atas bantuan dan dukungannya.
10. Kepada teman-teman seperjuangan Juliana Sitorus, Amin Sibuea, Ataran Marpaung, Edi Saputra Tambunan, Ruth Mentari, Lya Oktavia, Rumianto Manurung, Baik P. Sihombing, Jekson P. Sitanggang, Nur Layla Hannum, Marisa Marpaung.
11. Teman-teman stambuk 2010 “Physics Inside” yang diketuai Anthony terima kasih atas semuanya.
12. Rekan-rekan Lab. Elektronika Lanjutan terima kasih semuanya.
13. Senior, junior dan teman-teman yang tidak dapat saya sebut satu per satu terima kasih semuanya.
14. Sahaba-sahabat di NHKBP Koserna medan (Kak Chiquita, Bg Arno, Kak Meilani, Kak Nova, Kak Friska, Yosua, Tanti, Hans, Josua, Thomas dan yang lainnya) terima kasih atas doa dan dukungannya.
Medan, Agustus 2014
v
PENGENDALIAN PINTU AIR JAUH MENGGUNAKAN
SISTEM
ANDROID
VIA JARINGAN
WI-FI
ABSTRAK
Telah dirancang sebuah alat pengendalian pintu air jarak jauh menggunakan sistem android via jaringan Wi-Fi. Alat ini terdiri dari sensor air, motor dc, android, mikrokontroler ATmega 8535 dan PC. Alat ini digunakan untuk mendeteksi air, memonitoring dan mengontrol pintu air secara jarak jauh. Cara kerja alat ini adalah sensor air mendeteksi level ketinggian air dan diolah oleh mikrokontroler lalu data level dikirim ke PC melalui komunikasi serial RS-232. Data yang ditampilkan pada PC berupa data level ketinggian air yang dideteksi. Pada alat ini android berfungsi sebagai alat monitoring dan kontrol jarak jauh. Agar PC dan android terhubung digunakan software yaitu teamviewer. Teamviewer merupakan aplikasi remot kontrol yang aktif ketika PC dan android terkoneksi oleh Wi-Fi. ID dan password di teamviewer dari PC dimasukkan pada teamviewer di android agar saling terhubung. Untuk dapat membuka-menutup pintu air digunakan motor dc. Sehingga pintu air dapat dikontrol secara jarak jauh sesuai perintah yang diberikan.
vi
RESTRAINT FLOODGATE USING THE ANDROID SYSTEM
VIA WI-FI NETWORK
ABSTRACT
Has designed a device restraint floodgate using the android system via Wi-Fi network. This device consists of a water sensor, dc motor, android, ATmega microcontroller 8535 and PC. This tool is used to detect water , water monitoring and control door remotely. The workings of this tool is the water sensor detects water levels and processed by the microcontroller level data sent to a PC via RS -232 serial communication. The data is displayed on the PC in the form of data water levels are detected. In this android tool serves as a means of monitoring and restraint. To be used to connect the PC and the android software is TeamViewer. TeamViewer is a restraint application that is active when the PC and android connected by WiFi. TeamViewer ID and password on the PC included in TeamViewer on android that are connected. To be able to open – close the floodgate use dc motors. So that the floodgate can be controlled remotely as per the order given.
vii
1.1 Latar Belakang 1
1.2 Rumusan Masalah 2
1.3 Batasan Masalah 2
1.4 Tujuan Penelitian 3
1.5 Manfaat Penelitian 3
1.6 Sistematika Penulisan 3
BAB II Landasan Teori
2.1 Bendungan 5
2.2 Mikrokontroler 6
2.2.1 Mikrokontroler AVR Atmega 8535 6
2.2.2 Arsitektur AVR ATmega 8535 7
2.2.3 Konfigurasi Pin Mikrokontroler ATmega 8535 9 2.2.4 Deskripsi pin-pin pada Mikrokontroler ATMega 8535 10 2.2.5 Peta Memori ATmega 8535
2.2.5.1 Memori Program dan Data 12
2.2.6 Status Register 13
2.2.7 Bahasa Pemrograman ATMega 8535 14
2.3 Sensor 15
2.3.1 Sensor Air 15
2.4 Wireless LAN dan WiFi 16
2.5 Motor 21
2.5.1 Motor DC 21
2.6 IC MAX 232dan Komunikasi Serial RS-232 23
2.7 Android 25
2.8 Teamviewer 26
viii
BAB III Perancangan dan Sistem Kerja Rangkaian
3.1 Diagram Blok 29
3.2 Rangkaian Mikrokontroler ATMEGA 8535 30
3.3 Rangkaian Power Supply 31
3.4 Rangkaian MAX–232 32
3.5 Rangkaian Relay pada Motor DC33
3.6 Rangkaian Sensor Ketinggian Level Air 34
3.7 Rangkaian Limit Switch 35
3.8 Instalasi Teamviewer di PC dan Android 36
3.8.1 Instalasi pada PC 36
3.8.2 Instalasi pada Smartphone Android 37
3.9 Rangkaian Lengkap 38
3.10 Flowchart 39
BAB VI Hasil dan Analisis
4.1 Pengujian Alat 40
4.1.1 Pengujian Tampilan pada PC 40
4.1.2 Pengujian Rangkaian Motor DC 45
4.1.3 Pengujian Rangkaian Sensor Air 45
4.2 Analisa Data 47
4.2.1 Pengujian Jarak Menggunakan Android di dalam ruangan 47 4.2.2 Pengujian Jarak Menggunakan Android di luar ruangan 47 4.2.3 Pengambilan Data pada setiap Level Ketinggian Air pada PC
Dan Android 48
BAB V Kesimpulan dan Saran
5.1 Kesimpulan 52
5.2 Saran 52
Daftar Pustaka 53
Lampiran 1 Program pada Mikrokontroler ATmega 8535 Lampiran 2 Program pada Visual Basic
Lampiran 3 Foto Alat
ix
DAFTAR TABEL
Nomor Judul Halaman
Tabel
Tabel 2.1 Deskripsi pin-pin pada Mikrokontroler ATmega 8535 10 Tabel 2.2 Standar WLAN di dalam Keluarga IEEE 802.11 19
Tabel 4.1 Pengujian di dalam Ruangan 47
x
DAFTAR GAMBAR
Nomor Judul Halaman
Gambar
Gambar 2.1 Pintu Air Bendungan Katulampa 6
Gambar 2.2 Blok Diagram dan ArsitekturATmega 8535 8 Gambar 2.3 Konfigurasi Pin Mikrokontroler ATmega 8535 9
Gambar 2.4 Memori AVR ATmega 8535 13
Gambar 2.5 Status Register 13
Gambar 2.6 Arsitektur WLAN 802.11 17
Gambar 2.7 Bagian-Bagian Motor DC 22
Gambar 2.8 Bentuk Fisik IC MAX 232 24
Gambar 2.9 Tampilan Teamviewer pada PC 27
Gambar 2.10 Tampilan Teamviewer pada Android 28
Gambar 3.1 Diagram Blok Rangkaian 29
Gambar 3.2 Rangkaian Mikrokontroler ATMEGA 8535 31 Gambar 3.3 Rangkaian Skematik Power Supply 32
Gambar 3.4 Rangkaian Max–232 33
Gambar 3.5 Rangkaian Relay pada Motor DC 34
Gambar 3.6 Rangkaian Sensor Ketinggian Level Air 35
Gambar 3.7 Rangkaian Limit Switch 36
Gambar 3.8 Tampilan Teamviewer pada PC dengan WiFi ON 36 Gambar 3.9 Tampilan Teamviewer pada Android denganWiFi ON 37
Gambar 3.10 Rangkaian Lengkap 38
v
PENGENDALIAN PINTU AIR JAUH MENGGUNAKAN
SISTEM
ANDROID
VIA JARINGAN
WI-FI
ABSTRAK
Telah dirancang sebuah alat pengendalian pintu air jarak jauh menggunakan sistem android via jaringan Wi-Fi. Alat ini terdiri dari sensor air, motor dc, android, mikrokontroler ATmega 8535 dan PC. Alat ini digunakan untuk mendeteksi air, memonitoring dan mengontrol pintu air secara jarak jauh. Cara kerja alat ini adalah sensor air mendeteksi level ketinggian air dan diolah oleh mikrokontroler lalu data level dikirim ke PC melalui komunikasi serial RS-232. Data yang ditampilkan pada PC berupa data level ketinggian air yang dideteksi. Pada alat ini android berfungsi sebagai alat monitoring dan kontrol jarak jauh. Agar PC dan android terhubung digunakan software yaitu teamviewer. Teamviewer merupakan aplikasi remot kontrol yang aktif ketika PC dan android terkoneksi oleh Wi-Fi. ID dan password di teamviewer dari PC dimasukkan pada teamviewer di android agar saling terhubung. Untuk dapat membuka-menutup pintu air digunakan motor dc. Sehingga pintu air dapat dikontrol secara jarak jauh sesuai perintah yang diberikan.
vi
RESTRAINT FLOODGATE USING THE ANDROID SYSTEM
VIA WI-FI NETWORK
ABSTRACT
Has designed a device restraint floodgate using the android system via Wi-Fi network. This device consists of a water sensor, dc motor, android, ATmega microcontroller 8535 and PC. This tool is used to detect water , water monitoring and control door remotely. The workings of this tool is the water sensor detects water levels and processed by the microcontroller level data sent to a PC via RS -232 serial communication. The data is displayed on the PC in the form of data water levels are detected. In this android tool serves as a means of monitoring and restraint. To be used to connect the PC and the android software is TeamViewer. TeamViewer is a restraint application that is active when the PC and android connected by WiFi. TeamViewer ID and password on the PC included in TeamViewer on android that are connected. To be able to open – close the floodgate use dc motors. So that the floodgate can be controlled remotely as per the order given.
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Ilmu pengetahuan dan teknologi yang semakin berkembang pada saat ini yang menciptakan teknologi canggih khususnya teknologi komunikasi yaitu ponsel pintar atau smart phone yang berbasis dengan android. Ponsel pintar atau smart phone merupakan pengembangan dari ponsel – ponsel lama yang di dalamnya ditambahkan sebuah OS atau operational system. Sistem pengendalian dan sistem pemantuan merupakan sistem yang mampu mengendalikan dan mengawasi sebuah kejadian atau suatu kegiatan yang dapat terjadi pada suatu tempat atau sebuah lokasi yang dianggap penting untuk dijaga tingkat keamananya.
Semakin bertambahnya permintaan akan ponsel atau smart phone ini dikarenakan terdapatnya fitur – fitur atau aplikasi di dalamnya yang dapat meringankan atau mempermudah suatu pekerjaan manusia. Banyaknya aplikasi yang terdapat di dalamnya, dimana salah satunya dapat digunakan untuk mengontrol atau mengendalikan suatu hal yang dianggap penting. Setiap manusia menginginkan pekerjaannya dapat dikerjakan dengan santai, mudah dan ringan. Contohnya pada pintu air suatu bendungan yang menguras tenaga manusia untuk membukanya lalu menutupnya kembali.
Pintu air merupakan tempat keluar atau pembuangan air yang banjir atau melebihi kapasitas dari suatu bendungan. Dengan pernyataan semakin berkembangnya teknologi yang canggih, penulis ingin mengkombinasikan antara smart phone android dengan instrumen mikrokontroller Atmega 8535 melalui koneksi jaringan internet. Berdasarkan pernyataan tersebut penulis mebuat rancangan dengan judul “PENGENDALIAN PINTU AIR JARAK JAUH MENGGUNAKAN SISTEMANDROIDVIA JARINGANWI–FI”.
2
Computer) terhubung dengan jaringan Wi – Fi. Agar kedua device dapat membaca antara yang satu dengan yang satunya maka diperlukan perangkat lunak seperti team viewer yang dapat di instalpada smart phone android danPersonal Computer. Team viewer merupakan remot kontrol yang dapat mengontrol suatu dekstop dengan jarak jauh maupun dekat asalkan terhubung dengan jaringan internet.
Dalam hal ini digunakan mikrokontroler 8535 sebagai otak yang berfungsi sebagai input – output agar semua segmen di setiap alat yang digunakan dapat bekerja dengan fungsinya masing – masing. Data yang dibaca oleh mikrokontrol melalui sensor air dikirim kepada PC dan smart phone android melalui jaringan Wi – Fi agar dapat dikontrol dan dimonitoring level ketinggian air pada bendungan. Smart phone android berfungsi sebagai pengontrol pintu air jarak jauh untuk membuka dan menutup pintu air agar kondisi ketinggian air pada bendungan tetap dalam terkontrol dan terjaga.
1.2 Rumusan Masalah
1. Bagaimana merancang alat untuk mengedalikan pintu air bendungan jarak jauh menggunakan sistem android via jaringanWi–Fi.
2. Bagaimana merancang alat untuk menentukan adanya air atau tidak serta ketinggian air pada bendungan yang dapat bekerja secara berkala.
3. Bagaimana cara mengirimkan hasil dan pengendalian pintu air bendungan jarak jauh pada sistem android yang dikendalikan oleh pengguna.
1.3 Batasan Masalah
Batasan–batasan masalah yang ada pada ruang lingkup masalah adalah 1. Alat dirancang menggunakan smart phone android untuk mengendalikan
3
2. Motor DC dikendalikan secara manual agar air bendungan dapat dikeluarkan dengan bebas.
3. Data yang dikirim pada mikrokontroler yang sudah diatur sesuai programnya, menggunakan program Code Vision AVR dan Visual Basic pada tampilan PC.
4. Alat yang dirancang adalah rangkaian Hardware dan software sistem pengendalian pintu air jarak jauh.
1.4 Tujuan penelitian
Adapun tujuan penelitian ini dilakukan untuk :
1. Merancang sebuah miniatur sistem pengendalian pintu air jarak jauh menggunakan sistem android via jaringanWiFi.
2. Mengkombinasikan sistem kerja antara mikrokontroler dengan Motor DC terhadapsmartphone androidvia jaringanWiFi.
1.5 Manfaat Penelitian
1. Memanfaatkan sensor air untuk menentukan keadaan air dan level ketinggian air
2. Memanfaatkan Motor DC untuk membuka dan menutup pintu air bendungan.
3. Memanfaatkan smartphone android sebagai penerima dan pengendali pintu air bendungan jarak jauh.
1.6 Sistematika Penulisan
4
BAB 1 PENDAHULUAN
Bab ini berisikan pendahuluan yaitu membahas mengenai Latar
Belakang, Rumusan masalah, tujuan penulisan, batasan – batasan
masalah serta sistematika penulisan.
BAB II LANDASAN TEORI
Pada bab ini akan dibahas teori –teori yang mendukung pembahasan
tentang cara kerja dari teori rangkaian pengendalian pintu air jarak
jauh menggunakan sistemandroidvia jaringanwi–fi.
BAB III PERANCANGAN ALAT
Dalam bab ini akan dijelaskan tentang perancangan alat yaitu diagram blok dari rangkaian, skematik dan kerja dari setiap rangkaian.
BAB IV HASIL DAN ANALISIS
Bab ini berisikan tentang pengujian alat dan juga analisa tugas akhir yang telah dibuat.
BAB V KESIMPULAN DAN SARAN
Bab ini merupakan penutup yang berisi kesimpulan dan saran yang berkaitan dengan seluruh proses perancangan dan pembuatan tugas akhir ini.
5
BAB II
LANDASAN TEORI
2.1 Bendungan
Bendungan merupakan bangunan kontruksi yang dibangun untuk menahan laju air yang banyak dijadikan sebagai waduk, dam, danau buatan dan lain-lain. Suatu bendungan yang dibangun dengan cara menimbunkan bahan-bahan seperti batu, krakal, kerikil, pasir dan tanah pada komposisi tertentu dengan fungsi sebagai pengempang atau pengangkat permukaan air yang terdapat di dalam waduk di udiknya. Sehubungan dengan fungsinya sebagai pengepang air atau pengangkat permukaan air di dalam suatu bendungan. Dalam hal ini bendungan yang dibuat dalam bentuk prototipe yang memudahkan mekanisme pembuatan wadah bendungannya.
Pintu air merupakan suatu benda yang berfungsi menahan laju air pada sebuah bendungan. Pintu air terdiri dari dua bagian yang terpisah yaitu pintu yang bergerak dan bingkai yang merupakan tempat dimana pintu dipasang, sedangkan pada katup antara katup yang bergerak dan dinding katup (yang berfungsi sebagai bingkai) merupakan satu kesatuan. Karena itu katup diprodusir secara keseluruhan dan setelah dilakukan pengujian dalam pabrik langsung dapat dipasang dan berfungsi sesuai dengan karakteristiknya.
7
2.2.2 Arsitektur AVR ATmega 8535
Mikrokontroler AVR memiliki arsitektur RISC 8 bit, dimana semua intruksi dikemas dalam kode 16-bit dan sebagian besar instruksi dieksekusi dalam 1 (satu) siklus clock, berbeda dengan instruksi MCS51 yang membutuhkan 12 siklus clock. Selain itu AVR berteknologi RISC (Reduced Instruction Set Computing).
Secara garis besar arsitektur mikrokontroler ATMega8535 memiliki bagian sebagai berikut :
1. Port I/O 32 bit, yang dikelompokkan dalam Port A, Port B, Port C dan Port D.
2. Analog to Digital Converter 10-bit sebanyak 8 input. 3. Timer/counter sebanyak 3 buah dengan compare mode. 4. CPU 8 bit yang terdiri dari 32 register.
5. SRAM sebesar 512 byte.
6. Memory Flash sebesar 8 Kbyte dengan kemampuan read while write. 7. Interupsi Internal maupun eksternal.
8. Port Komunikasi SPI.
9. EEPROM sebesar 512 byte yang dapat diprogram saat operasi. 10. Analog Comparator.
11. Komunikasi serial standar USART dengan kecepatan maksimal 2,5 Mbps. Frekuensi clock maksimum 16 MHz.
12. PORT USART untuk komunikasi serial.
10
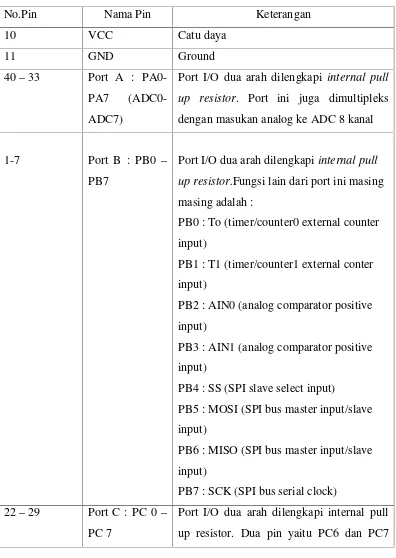
2.2.4 Deskripsi pin-pin pada Mikrokontroler ATMega8535
Untuk keterangan lebih lanjut dibawah ini merupakan sebuah tabel yang menjelaskan konfigurasi pin mikrokontroler ATmega 8535 secara rinci, yaitu:
Tabel 2.1 Deskripsi pin-pin AVR ATmega 8535
No.Pin Nama Pin Keterangan
10 VCC Catu daya
11 GND Ground
40–33 Port A : PA0-PA7 (ADC0-ADC7)
Port I/O dua arah dilengkapi internal pull up resistor. Port ini juga dimultipleks dengan masukan analog ke ADC 8 kanal
1-7 Port B : PB0 – PB7
Port I/O dua arah dilengkapiinternal pull up resistor.Fungsi lain dari port ini masing masing adalah :
PB0 : To (timer/counter0 external counter input)
PB1 : T1 (timer/counter1 external conter input)
PB2 : AIN0 (analog comparator positive input)
PB3 : AIN1 (analog comparator positive input)
PB4 : SS (SPI slave select input)
PB5 : MOSI (SPI bus master input/slave input)
PB6 : MISO (SPI bus master input/slave input)
PB7 : SCK (SPI bus serial clock) 22–29 Port C : PC 0 –
PC 7
11
berfungsi sebagai osilator eksternal untuk timer/counter 2.
14-21 Port D : PD0 – PD7
Port I/O dua arah dilengkapi internal pull up resistor. Fungsi lain dari port ini masing masing adalah :
PD0 : RXD (UART input line) PD1 : TXD (UART input line)
PD2 : INT0 (eksternal interrupt 0 input) PD3 : INT 1 (eksternal interrupt 1 input) PD4 : OC1B ( timer/counter 1 output compare B match input)
PD5 : OC1A ( timer/counter 1 output compare A match input)
PD6 : ICP (timer/counter1 input capture pin)
PD7 : OC2 (timer/counter2 output compare match output)
9 RESET Masukan reset. Sebuah reset terjadi jika pin ini diberi logika low melebihi periode minimum yang diperlukan.
13 XTAL 1 Masukan ke inverting oscillator amplifier dan masukan ke rangkaian internal clock.
12 XTAL 2 Keluaran dari inverting oscillator amplifier
30 AVCC Catu daya untuk port A dan ADC
31 AGND Analog Ground
12
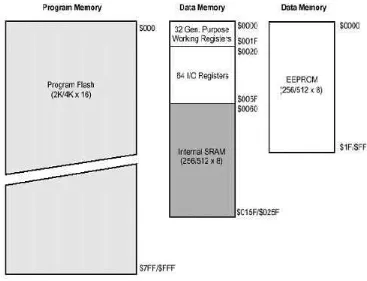
2.2.5 Peta Memori ATmega 8535
Mikrokontroler AVR ATmega 8535 memiliki dua jenis memori yaitu (1) memori data (SRAM) dan (2) memori program (memori Flash). Di samping itu juga dilengkapi dengan EEPROM (Electrical Erasable Programmable Read Only Memory) untuk penyimpanan data tambahan yang bersifat non-volatile. Memori EEPROM ini mempunyai lokasi yang terpisah dengan sistem register alamat, register data dan register kontrol yang dibuat khusus untuk EEPROM.
2.2.5.1 Memori Program dan Data
Mikrokontroler ATmega 8535 memiliki On-Chip In-System Reprogrammable Flash Memory untuk menyimpan program. Untuk alasan keamanan, memori program dibagimenjadi dua bagian yaitu (1) Boot Flash Section dan (2) Application Flash Section. Boot Flash Section digunakan untuk meyimpan program Boot Loade, yaitu program yang harus dijalankan pada saat AVR reset atau pertama kali diaktifkan. Application Flash Section digunakan untuk menyimpan progam aplikasi yang dibuat pengguna. Mikrokontroler AVR tidak dapat menjalankan program aplikasi ini sebelum menjalankan Boot Loader. Besarnya memoriBoot Flash Sectiondapat diprogram dari 128 word sampai 1024 word tergantung setting pada konfigurasi bit di-register BOOTSZ. Jika Boot Loader diproteksi, maka program pada Application Flash Section juga sudah aman.
Memori data dibagi menjadi tiga yaitu :
1. Terdapaat 32 register keperluan umum (general purpose register_GPR biasa disebut registerfiledi dalam teknologi RISC)
2. Terdapat 64 register untuk keperluaninput/output(I/Oregister)
G
2.2.6 Status Register
Status register adalah yang dilakukan ketika inti CPU mikrokontrol
1. Bit7 I (Global semua jenis int
Gambar 2.4 Memori AVR ATmega8535
ster
lah register berisi status yang dihasilkan pada tika suatu instruksi dieksekusi. SREG merupa okontroler.
Gambar 2.5 Status Register
Global Interrupt Enable), Bit harus di Set untuk s interupsi.
13
pada setiap operasi upakan bagian dari
14
2. Bit6T (Bit Copy Storage), Instruksi BLD dan BST menggunakan bit T sebagai sumber atau tujuan dalam operasi bit. Suatu bit dalam sebuah register GPR dapat disalin ke bit T menggunakan instruksi BST, dan sebaliknya bit T dapat disalin kembali kesuatu bit dalam register GPR dengan menggunakan instruksi BLD.
3. Bi5H (Half Cary Flag)
4. Bit4 S (Sign Bit) merupakan hasil operasi EOR antara flag –N (negative) dan flag V (complement overflow).
5. Bit3 V (Two’s Component Overflow Flag) Bit ini berfungsi untuk mendukung operasi matematis.
6. Bit2 N (Negative Flag) Flag N akan menjadi Set, jika suatu operasi matematis menghasilkan bilangan negatif.
7. Bit1 Z (Zero Flag) Bit ini akan menjadi set apabila hasil operasi matematis menghasilkan bilangan 0.
8. Bit0 C (Cary Flag) Bit ini akan menjadi set apabila suatu operasi menghasilkancarry.
2.2.7 Bahasa Pemrograman ATMega8535
Pemrograman mikrokontroler ATMega8535 dapat menggunakan low level language (assembly) dan high level language (C, Basic, Pascal, Java, dll) tergantung compiler yang digunakan. Bahasa Assembler mikrokontroler AVR memiliki kesamaan instruksi, sehingga jika pemrograman satu jenis mikrokontroler AVR sudah dikuasai, maka akan dengan mudah menguasai pemrograman keseluruhan mikrokontroler jenis mikrokontroler AVR. Namun bahasa assembler relatif lebih sulit dipelajari dari pada bahasa C. Untuk pembuatan suatu proyek yang besar akan memakan waktu yang lama serta penulisan programnya akan panjang. Sedangkan bahasa C memiliki keunggulan dibanding bahasa assembler yaitu independent terhadap hardware serta lebih mudah untuk menanganiprojectyang besar.
15
bahasa mesin, dapat dilakukan dengan bahasa C dengan penyusunan program yang lebih sederhana dan mudah. Bahasa C terletak diantara bahasa pemrograman tingkat tinggi danassembly.
2.3 Sensor
Dalam pendeteksian suatu sensor tidak akan terlepas dari istilah tranduser. Tranduser adalah sebuah alat yang bila di gerakkan oleh energi di dalam sebuah sistem transmisi menyalurkan energi dalam bentuk yang sama atau dalam bentuk yang berlainan ke sistem transmisi kedua. Transmisi energi ini bisa listrik, mekanik, kimia, optik (radiasi) atau termal (panas). Definisi tranduser yang luas mencakup alat- alat yang mengubah gaya atau perpindahan mekanis menjadi sinyal elektrik.
Pada dasarnya sensor dan tranduser mempunyai definisi sama yaitu menerima rangsangan (gejala fisis) dari luar dan mengubahnya menjadi sinyal listrik. Proses fisis yang merupakan stimulus atau rangsangan sensor dapat berupa fluks magnetik, gaya, arus listrik, temperatur, cahaya, tekanan dan proses fisis lainnya. Sensor dan tranduser mempunyai perbedaan yang sangat kecil yaitu pada koefisien konversi energi. Sensor itu sendiri terdiri dari tranduser atau tanpa penguat atau pengolah sinyal yang terbentuk dalam satu indera.
2.3.1 Sensor Air
Rangkaian Sensor Air atau Rangkaian Sensor Pendeteksi Banjir merupakan rangkaian yang mudah dan sederhana dengan memanfaatkan sifat karakteristik transistor sebagai saklar. Apalagi rangkaian sensor air sangat membantu kita misalnya untuk otomatisasi pengisian air pada bak mandi, pendeteksi banjir jika seandainya daerah anda sering dilanda banjir dan bisa digunakan untuk aplikasi lainnya.
16
a. Supply/baterai 9 volt b. Relay 5 volt
c. Resistor 1 K
d. Transistor NPN (2N2222A) e. 6 buah kawat
Prinsip kerja dari rangkaian sensor air pada rangkaian pendeteksi ketinggian level air adalah ketika bendungan sudah terisi penuh maka ujung kawat pertama dan terakhir terkena air, dimana air disini sebagai konduktor yang baik untuk menghantarkan arus, sehingga bisa mengaktifkan transistor sebagai saklar otomatis dan menampilkan data level pada PC sehingga dapat diketahui keadaan level ketinggian air bendunganjarak jauh. Dengan sistem kerja yaitu, sensor air mendeteksi level ketinggian air, mikrokontroler meng-input data dan mengirim data level air ke PC.
2.4WirelessLAN (WLAN) danWiFi
Wireless LAN atau (WLAN) tidak lain adalah jaringan LAN berbasis wireless. Jaringan ini menggunakan gelombang radio elektromagnetik untuk mengirim data di antara komputer-komputer dalam sebuah LAN (Local Area Network), tanpa melibatkan set koneksi fisik kabel jaringan atau telepon.
18
memiliki sebuah ID yang disebut dengan nama ESSID berupa deretan karakter dengan panjang 32 bit. Arsitektur WLAN dalam 802.11 mensyaratkan agar sebuah terminal yang berada dalam sebuah BSS dapat berkomunikasi dengan terminal lain di dalam BSS lain. Arsitektur ini juga mengijinkan agar sebuah terminal dapat berpindah dari sebuah BSS ke BSS lain dengan mudah.
Sebuah BSS yang terdiri sendiri, dalam artian tidak terkoneksi ke BSS yang lain atau DS disebut sebagaiIndependentBSS (IBSS) atau jaringan Ad Hoc. Dalam konfigurasi ini setiap terminal berkomunikasi secara Peer-To-Peer (P2P), tidak ada base-station di dalamnya sehingga semua terminal memiliki kedudukan yang sama.
Untuk proses auntetikasi setiap pengguna ke dalam WLAN, standar 802.11 memiliki dua macam cara, yaitu Open System Authentication danShared Key Authentication. PadaOpen System Authentication, setiap pengguna yang akan melakukan autentikasi secara langsung akan menerima autentikasi. Karena itu cara ini merupakan model autentikasi yang tidak aman. Sebaliknya apabilaShared Key Authentication digunakan, maka setiap pengguna yang mengininkan autentikasi untuk melakukan akses ke dalam sebuah WLAN harus memiliki sebuah kata kunci rahasia (shared secret key). Untuk menjaga keamanan, kata kunci ini diimplementasikan dengan menggukan algoritma Wired Equivalent Privacy(WEP) atau WiFi Protected Acces(WPA danWPA2).
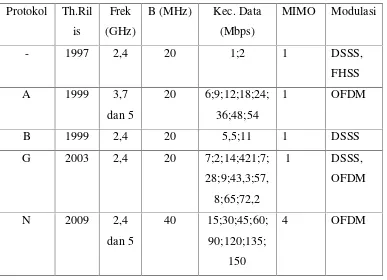
Dalam perkembangannya, WLAN dengan standar IEEE 802.11 sebenarnya memiliki beberapa jenis ditandai dengan penambahan huruf dibagian belakang, misalnya 802.11a, 802.11b, dan seterusnya. Perbedaan dari masing-masing jenis ini tergantung pada frekuensi operasi, kecepatan pengiriman data dan tipe modulasi yang digunakan.
Secara detail perbedaan beberapa jenis protokol 802.11 ditunjukkan dalam tabel 2.2 Sekalipun demikian, 802.11b, 802.11g dan 802.11n merupakan protokol yang paling populer dan banyak digunakan saat ini, istilah “WiFi” biasa
19
tersebut adalah Wireless Fidelity (WiFi) Alliance. Karena ituproduk-produk WiFi yang telah lolos dari WiFi Alliance dapat menggunakan logo sertifikasi WiFi.
Frekuensi operasi 2,4GHz disebut sebagai pitas Industrial Scientific Medical (ISM) yang merupakan pita frekuensi bebas lisensi di negara manapun. Pada sekitar tahun 2000, pemerintah Indonesia pernah mencoba mengatur keberadaan frekuensi ISM ini. Dikarenekan sifatnya yang bebas maka setiap orang dapat menggunakan frekuensi ini tanpa memerlukan ijin khusus. Sehingga terjadi interferensi dimana-mana dan tentu saja sangat merugikan beberapa perusahaan ISP yang telah menggunakan fekuensi tersebut sebelumnya untuk menjangkau daerah-daerah yang tidak memungkinkan penarikan kabel unutk koneksi internet. Namun untuk saat ini, pemanfaatan frekuensi pita ISM di Indonesia bebas berlisensi dengan persyaratan agar setiap perangkat memiliki batasan daya pancar tertentu.
Tabel 2.2 Standar WLAN di dalam Keluarga IEEE 802.11 Protokol Th.Ril
G 2003 2,4 20 7;2;14;421;7;
28;9;43,3;57,
20
Tujuan utama dari pengguna modulasi OFDM adalah meningkatkan ketahanan sinyal terhadap interferensi, dan tentu saja tujuan akhir dari teknologi ini adalah untuk meningkatkan kecepatan pengiriman data.
Seperti terlihat dalam tabel 2.2, 802.11a beroperasi pada frekuensi 5GHz. Pita frekuensi ini tidak banyak digunakan, sehingga sangat menguntungkan para pengguna dari dikarenakan gelombang radio tidak banyak terganggu ileh interferensi. Akan tetapi semakin tinggi frekuensi operasi berakibat pada berkurangnya jangkauan area di WLAN. Secara teoritis gelombang radio dengan frekuensi tinggi berakibat pada berkurangnya kemampuan gelombang tersebut memantul. Gelombang akan melakukan penetrasi terhadap dinding atau obyek apa pun di depannya sehingga daya jangkauannya berkurang karena sebagian besar daya telah terserap oleh dinding.
Standar dalam keluarga 802.11 terbaru yang dikenal dengan nama 802.11n menambahkan kemampuan untuk menggunakan antena lebih dari satu. Teknologi disebut dengan nama antena Multiple Input Multiple Output (MIMO). WiFi (Wireless Fidelity) adalah istilah umum untuk peralatanwireless LAN, yang juga dikenal dengan WLAN. Biasanya peralatan WiFi mengadopsi standar keluarga IEEE 802.11, yang didukung oleh banyak vendor. Mengapa kita menggunkan infrastruktur Wireless Internet? Pada dasarnyaada beberapajawaban sederhana, seperti:
a. Wireless untuk mem-bypass saluran telepon yang mahal dan amat lambat untuk mengakses Internet.
b. Wireless sangat mudah diinstalasi, dapat dioperasikan denga biaya yang relatif murah, dan tidak perlu bergantung pada insfrastruktur telkom.
c. Karena WiFi pada dasarnya Wireless LAN, karena itu dia bekerja pada kecepatan yang cukup tinggi, yakni 122Mbps, bagi peralatan yang mengikuti standar IEEE 802.11b.
21
2.5 Motor
Motor adalah perangkat elektromagnetik yang dapat mengubah energi listrik menjadi energi mekanik. Perubahan ini dilakukan dengan merubah tenaga listrik menjadi magnet yang disebut sebagai elektromagnit. Sebagaimana kita ketahui bahwa kutub dari magnet yang senama akan tolak-menolak dan kutub-kutub tidak senama, tarik-menarik. Maka kita dapat memperoleh gerakan jika mendapatkan sebuah magnet pada sebuah motor yang dapat berputar, dan magnet yang lain pada suatu kedudukan yang tetap. Dengan cara inilah energi listrik dapat diubah menjadi energi mekanik.
Motor listrik sudah menjadi kebutuhan kita sehari-hari untuk menggerakkan peralatan dan mesin yang membantu pekerjaan. Untuk memutar baling-baling pada kipas angin, digunakan motor listrik. Demikian juga, motor listrik digunakan pada peralatan rumah tangga lainnya seperti: hair dryer, blender, pompa air, mesin cuci, mesin jahit, bor listrik dan lain-lain. Mesin-mesin pertanian terutama mesin pengolah hasil pertanian dan mesin-mesin industri pun banyak yang menggunakan tenaga putarnya dari motor listrik. Secara umum motor listrik dapat dibagi menjadi motor ac dan motor dc, pembagian ini berdasarkan pada arus listrik yang digunakan unutk menggerakkannya. Penggunaan motor listrik sangatlah efisien.
2.5.1 Motor DC
23
2. Inti kutub magnet dan belitan penguat magnet
Inti kutub magnet dan belitan penguat magnet ini berfungsi untuk mengalirkan arus listrik agar dapat terjadi proses elektromagnetik. Adapun aliran fluks magnet dari kutub utara melalui celah udara yang melewati badan mesin.
3. Sikat-sikat
Sikat-sikat ini berfungsi sebagai jembatan bagi aliran arus jangkar dengan bebas, dan juga memegang peranan penting untuk terjadinya proses komutasi.
4. Komutator
Komutator ini berfungsi sebagai penyearah mekanik yang akan dipakai bersama-sama dengan sikat. Sikat-sikat ditempatkan sedemikian rupa sehingga komutasi terjadi pada saat sisi kumparan berbeda.
5. Jangkar
Jangkar dibuat dari bahan ferromagnetik dengan maksud agar kumparan jangkar terletak dalam daerah yang induksi magnetiknya besar, agar ggl induksi yang dihasilkan dapat bertambah besar.
6. Belitan jangkar
Belitan jangkar merupakan bagian yang terpenting pada mesin arus searah, berfungsi untuk tempat timbulnya tenaga putar motor.
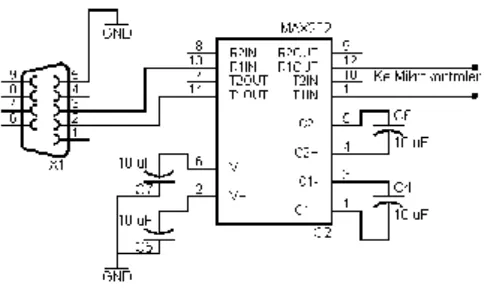
2.6 IC MAX 232 dan Komunikasi Serial RS-232
25
mengemudi sirkuit RS232 secara langsung, bagaimanapun, rentang keseluruhan bahwa sinyal RS232 dapat dikirim / diterima dapat dikurangi secara dramatis.
2.7 Android
Android adalah sistem operasi untuk telepon seluler yang berbasis Linux. Android menyediakan platform terbuka bagi para pengembang buat menciptakan aplikasi mereka sendiri untuk digunakan oleh bermacam peranti bergerak. Awalnya, Google Inc. membeli Android Inc., pendatang baru yang membuat peranti lunak untuk ponsel. Kemudian untuk mengembangkan Android, dibentuklah Open Handset Alliance, konsorsium dari 34 perusahaan peranti keras, peranti lunak, dan telekomunikasi, termasuk Google, HTC, Intel, Motorola, Qualcomm, T-Mobile, dan Nvidia.
Pengembang aplikasi Android diperbolehkan untuk mendistribusikan aplikasi mereka di bawah skema lisensi apapun yang mereka inginkan. Sistem Android menggunakan database untuk menyimpan informasi penting yang diperlukan agar tetap tersimpan meskipun device dimatikan. Untuk melakukan penyimpanan data pada database, sistem Android menggunakan SQLite yang merupakan suatu open source database yang cukup stabil dan banyak digunakan pada banyak device berukuran kecil.
Aplikasi Android dikembangkan dalam bahasa pemrograman Java dengan menggunakan kit pengembangan perangkat lunak Android (SDK). SDK ini terdiri dari seperangkat perkakas pengembangan, termasuk debugger, perpustakaan perangkat lunak, emulator handset yang berbasis QEMU, dokumentasi, kode sampel, dan tutorial. Didukung secara resmi oleh lingkungan pengembangan terpadu (IDE) Eclipse, yang menggunakan plugin Android Development Tools (ADT). Perkakas pengembangan lain yang tersedia di antaranya adalah Native Development Kit untuk aplikasi atau ekstensi dalam C atau C++, Google App Inventor, lingkungan visual untuk pemrogram pemula, dan berbagai kerangka kerja aplikasi web seluler lintas platform.
26
versi x86 khusus Android. Pada tahun 2013, Freescale mengumumkan melibatkan Android dalam prosesor i. MX buatannya, yakni seri i.MX5X dan i.MX6X. Pada 2012, prosesor Intel juga mulai muncul pada platform utama Android, misalnya pada telepon seluler.
Beberapa komponen perangkat keras tidak diperlukan, namun sudah menjadi standar di perangkat tertentu. Beberapa fitur awalnya dibutuhkan sebagai persyaratan, namun kemudian ditiadakan. Setelah Android menjadi OS telepon pintar, beberapa perangkat keras, seperti mikrofon, lambat laun berubah menjadi perangkat opsional. Selain itu, kamera ditetapkan sebagai perangkat wajib bagi ponsel-ponsel Android.
Perangkat Android menggabungkan berbagai komponen perangkat keras opsional, termasuk kamera video, GPS, sensor orientasi perangkat keras, kontrol permainan, akselerometer, giroskop, barometer, magnetometer, sensor proksimitas, sensor tekanan, termometer, dan layar sentuh. Android mendukung OpenGL ES 1.1, 2.0, dan 3.0. Beberapa aplikasi secara eksplisit mengharuskan versi tertentu dari OpenGL ES, sehingga perangkat keras GPU yang cocok diperlukan bagi perangkat Android untuk menjalankan aplikasi tertentu.
Antarmuka pengguna Android didasarkan pada manipulasi langsung, menggunakan masukan sentuh yang serupa dengan tindakan di dunia nyata, seperti menggesek, mengetuk, mencubit, dan membalikkan cubitan untuk memanipulasi obyek di layar.
2.8Teamviewer
28
c. Mengontrol penuh terhadap mouse dan keyboard d. Memanipulasi data suatu PC dengan mudah
e. Memiliki fitur video call yang memungkinkan setiap user dapat saling berkomunikasi melalui camera
f. Memiliki fasilitas chatting
g. Bisa mengontrol penuh seluruh aktifitas pada suatu PC
h. Mudah digunakan karena sudah ada di setiap sistem operasi windows.
i. Bisa mengendalikan jarak jauh dengan syarat kedua PC saling terkoneksi ke jaringan.
j. Mampu mematikan dan menghidupkan PC secara remote. k. Memanipulasi data suatu PC dengan mudah
l. Bisa berbagi file melalui sharing data
m. Keamanan sangat terjamin karena PC client tidak akan bisa memanipulasi data seluruh data server kecuali data yang di sharing oleh server.
n. Ada yang berperan sebagai client dan server.
2.9 PC (Personal Computer)
Personal Komputer (PC) adalah seperangkat komputer yang digunakan oleh satu orang saja/ pribadi. Fungsi utama dari PC adalah untuk mengolah data input dan menghasilkan output berupa data/informasi sesuai dengan keinginan user (pengguna).
29
BAB III
PERANCANGAN DAN SISTEM KERJA RANGKAIAN
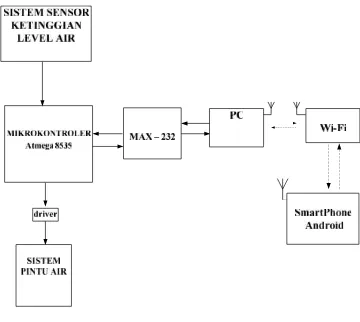
3.1 Diagram Blok
Diagram blok merupakan gambaran dasar dari rangkaian sistem yang mempunyai fungsi masing–masing. Adapun sistem rangkaian dari rankaian yang di rancang adalah sebagai berikut :
30
3.2 Rangkaian Mikrokontroller ATMEGA 8535
Pada perancangan alat ini akan digunakan mikrokontroler ATmega 8535 yang berfungsi untuk menerima input dari sensor air, menampilkannya pada PC dengan microsoft visual basic yang telah diprogram dan di implementasikan pada pemrograman mikrokontroler AVR ATmega 8535. Komponen utama dari rangkaian ini adalah IC mikrokontroler ATmega 8535. Pada IC inilah semua program diisikan, sehingga rangkaian dapat berjalan sesuai dengan yang diinginkan.
Mikrokontroler ini memiliki 32 port I/O, yaitu port A, port B, port C dan port D. Pin 33 sampai 40 adalah port A yang merupakan port ADC, dimana port ini dapat menerima data analog. Pin 1 sampai 8 adalah port B. Pin 22 sampai 29 adalah port C. Sedangkan Pin 14 sampai 21 adalah port D. Pin 10 dihubungkan ke sumber tegangan 5 Volt. Pin 11 dihubungkan ke ground. Rangkaian mikrokontroler ini menggunakan komponen kristal sebagai sumber clocknya. Nilai kristal ini akan mempengaruhi kecepatan mikrokontroler dalam mengeksekusi suatu perintah tertentu. Pada pin 9 dihubungkan dengan sebuah kapasitor dan sebuah resistor yang dihubungkan ke ground. Kedua komponen ini berfungsi agar program pada mikrokontroler dijalankan beberapa saat setelah power aktif. Lamanya waktu antara aktifnya power pada IC mikrokontroler dan aktifnyapower sebesar perkalian antara kapasitor dan resistor tersebut. Dalam perancangan alat ini, sistem minimum mikrokontroler ATmega 8535 terdiri dari :
1. ChipIC Mikrokontroler ATmega 8535 2. Kristal 11.0592 MHz
3. Kapasitor 4. Resistor
Karakteristik MAX– 1. Logika 1 disebut 2. Logika 0 disebut 3. Daerah tegang
daerah teganga harus dihindar atau lebih posi tersebut dapat m
3.5 Rangkaian Relay p
Rangkaian relay pad berlawana arah jarum seperti gambar berikut
Gambar 3.4 Rangkaian Max–232
–232 adalah sebagai berikut :
sebut mark terletak antara tegangan -3 Volt hingg sebut space terletak antara tegangan +3 Volt hingg
ngan antara -3 Volt hingga +3 Volt adalah inv ngan yang tidak memiliki level logika yang ndari. Demikian juga level tegangan lebih negat positif dari +25 Volt juga harus dihindari ka pat merusak line driver pada saluran RS232.
lay pada Motor DC
pada motor DC untuk menggerakkan motor D um jam. Rangkaian relay sebagai penggerak m
kut :
33
hingga -25 Volt. hingga +25 Volt.
invalid level, yaitu ng pasti sehingga gatif dari -25 Volt i karena tegangan
Gam
Pada rangkai digunakan transistor N ke kolektor dari transi maka kolektor akan menyebabkan tegang mengakibatkan relay tidak terhubung ke e keadaan ini menyebabka pada basis (VBE) > 0.7 sebaliknya jika relay t
3.6 Rangkaian Sensor
Data level air yang ditampilkan ke PC da :
ambar 3.5 Rangkaian Relay pada Motor DC
kaian ini untuk mengaktifkan atau menon or NPN. Dari gambar dilihat bahwa negatif rela
ansistor NPN, ini berarti jika transistor dalam n terhubung ke emitor langsung terhubung k angan di kolektor menjadi 0 volt, keada ay aktif. Sebaliknya jika transistor tidak aktif, e emitor, sehingga tegangan pada kolekor m
babkan tidak aktif. Syarat transistor aktif adala 0.7 Volt. Apabila relay aktif makan motor DC
y tidak aktif maka motor DC akan diam
nsor Ketinggian Level Air
g dideteksi oleh sensor air dikirim ke mikr dansmartphone android. Rangkaiannya adalah
34
C
non-aktifkan relay relay dihubungkan lam keadaan aktif g ke ground yang keadaan ini akan ktif, maka kolektor menjadi 12 volt, dalah jika tegangan DC akan bergerak
39
3.9 Flowchart
40
BAB IV
HASIL DAN ANALISIS
Pada bab ini, akan dibahas pengujian alat dan analisis pengujiannya.
4.1 Pengujian Alat
Rangkaian pengujian alat secara keseluruhan dimuat pada lampiran 3.
4.1.1 Pengujian Tampilan pada PC
Pengujian pada PC menggunakan program Visual Basic 2008. Pada tahap ini, dilakukan pengaturan tampilan pada PC untuk mempermudah memonitoring level ketinggian air. Untuk dapat menampilkan level ketinggian air tersebut pada PC digunakanlisting programsebagai berikut :
Public Class Form1 Dim level As Integer
Dim cnn As New OleDb.OleDbConnection
Private Sub RefreshData()
If Not cnn.State = ConnectionState.Open Then cnn.Open()
End If
Dim da As New OleDb.OleDbDataAdapter("SELECT waktu, sensor FROM tabel1 ORDER BY waktu", cnn)
Dim dt As New DataTable da.Fill(dt)
41
End Sub
Private Sub Form1_Load(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles MyBase.Load
SerialPort1.PortName = "COM4" SerialPort1.BaudRate = "9600"
SerialPort1.Parity = IO.Ports.Parity.None SerialPort1.StopBits = IO.Ports.StopBits.One SerialPort1.DataBits = 8
SerialPort1.Open()
cnn = New OleDb.OleDbConnection
cnn.ConnectionString = "Provider=Microsoft.Jet.Oledb.4.0; Data Source=" & Application.StartupPath & "\data.mdb"
Me.RefreshData() End Sub
Private Sub Timer1_Tick(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles Timer1.Tick
Dim nilai As Integer
TextBox1.Text = SerialPort1.ReadExisting If TextBox1.Text <> "" Then
nilai = Val(TextBox1.Text) If (nilai = 0) Then
level = 0
43
Private Sub Timer2_Tick(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles Timer2.Tick
Label13.Text = Format(Now, "dd MMMM yyyy") Label14.Text = Format(Now, "HH:mm:ss")
44
Private Sub database_Tick(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles database.Tick
Dim cmd As New OleDb.OleDbCommand If TextBox1.Text <> "" Then
If Not cnn.State = ConnectionState.Open Then cnn.Open()
End If
cmd.Connection = cnn
cmd.CommandText = "INSERT INTO tabel1(waktu, sensor) " & _ " VALUES('" & TextBox2.Text & "','" & level & "')" cmd.ExecuteNonQuery()
RefreshData() cnn.Close() End If
End Sub
Private Sub Button1_Click(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles Button1.Click
SerialPort1.Write("1") End Sub
Private Sub Button2_Click(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles Button2.Click
SerialPort1.Write("2") End Sub
45
4.1.2 Pengujian Rangkaian Motor DC
Pengujian Motor DC dengan menghubungkan Motor DC ke PORTB.0 dan PORTB.1
#define buka PORTB.0 #define tutup PORTB.1 buka=0;
tutup=0; while (1)
{ }
Program di atas akan membaca PORTB.0 dan PORTB.1 yang dihubungkan ke Motor DC dengan perintah buka dan tutup yang berfungsi untuk membuka dan menutup pintu air.
4.1.3 Pengujian Rangkaian Sensor Air
Pada pengujian ini dengan cara menghubungkan sensor air ke PORTC.0, PORTC.1, PORTC.2, PORTC.3, PORTC.4 dan PORTC.5. Selanjutnya akan membaca setiap nilai level ketinggian air dan akan ditampilkan ke PC dan android. Programnya sebagai berikut:
// Place your code here
if (Level1==0){level=1;} else {level=0;}
if (Level2==0){level=2;}
46
if (Level4==0){level=4;}
if (Level5==0){level=5;}
if (Level6==0){level=6;}
if (level==0){putchar(48);}
if (level==1){putchar(49);}
if (level==2){putchar(50);}
if (level==3){putchar(51);}
if (level==4){putchar(52);
if (level==5){putchar(53);} tutup=1;}
if (level==6){putchar(54); buka=1;}
if (data_serial==49) {buka=1; data_serial=0;}
if (data_serial==50) {tutup=1; data_serial=0;}
47
4.2 Analisa Pengujian
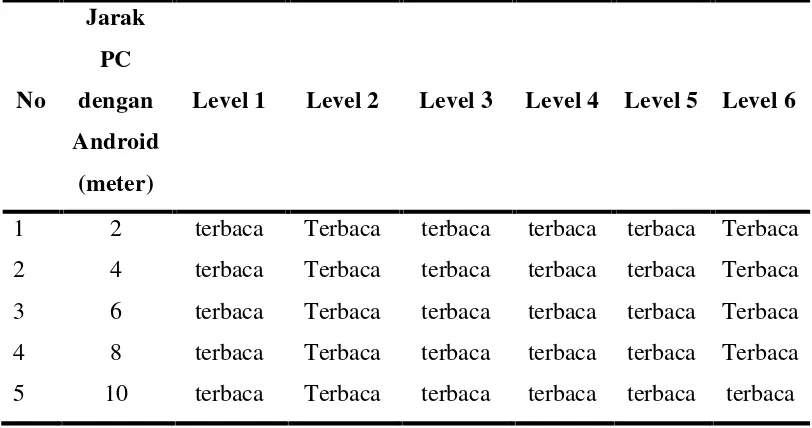
4.2.1 Pengujian Jarak MenggunakanAndroiddi dalam Ruangan
Tabel 4.1 Pengujian di dalam Ruangan
No
Jarak
PC
dengan
Android
(meter)
Level 1 Level 2 Level 3 Level 4 Level 5 Level 6
1 2 terbaca Terbaca terbaca terbaca terbaca Terbaca 2 4 terbaca Terbaca terbaca terbaca terbaca Terbaca 3 6 terbaca Terbaca terbaca terbaca terbaca Terbaca 4 8 terbaca Terbaca terbaca terbaca terbaca Terbaca 5 10 terbaca Terbaca terbaca terbaca terbaca Terbaca
4.2.2 Pengujian Jarak MenggunakanAndroiddi luar Ruangan
Tabel 4.2 Pengujian di luar Ruangan
No
Jarak
PC
dengan
Android
(meter)
Level 1 Level 2 Level 3 Level 4 Level 5 Level 6
52
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
1. Telah dirancang sebuah miniatur pengendalian pintu air jarak jauh menggunakan sistem android via jaringan WiFi. Alat ini terdiri dari mikrokontroler, sensor air, motor dc, android, dan PC. Alat ini akan bekerja dengan baik apabila terkoneksi dengan jaringanWiFi.
2. Kombinasi antara mikrokontropler dengan motor dc terhadap smartphone android. Android berfungsi sebagai alat monitoring dan kontrol jarak jauh. Agar PC dan android terhubung digunakan software yaitu teamviewer. Teamviewer merupakan aplikasi remot kontrol yang aktif ketika PC danandroidterkoneksi olehWiFi. ID dan password di teamviewer dari PC dimasukkan pada teamviewer di android agar saling terhubung. Untuk dapat membuka-menutup pintu air digunakan motor dc yang telah di program dalam Mikrokontroler. Sehingga pintu air dapat dikontrol secara jarak jauh sesuai perintah yang diberikan.
5.1 Saran
1. Sebaiknya rangkaian dan sistem dikemas dalam bentuk yang efektif agar penggunaanya lebih efisien.
53
DAFTAR PUSTAKA
Jusak, 2013.Teknologi Komunikasi Data Modern. Yogyakarta : Penerbit Andi Yogyakarta.
Madcoms, 2004. Referensi Microsoft Visual Basic.NET. Yogyakarta : Penerbit Andi
Pramono Djoko, 2000.Mudah Menguasai Visual Basic 6. Jakarta : Elex Media Komputindo.
Purbo, Onno W. 2003.Infrastruktur Wireless Internet Kecepatan 11–22 Mbps.
Yogyakarta : Penerbit Andi Yogyakarta
Rafiudin, Rahmat, 2006.Sistem Komunikasi Data Mutakhir. Yogyakarta :
Penerbit Andi Yogyakarta
Sosrodarsono, Suyono.1989. Bendungan Type Urugan. Jakarta : PT Pradya Paramita
Susanto. 2006.Rangkaian Elektronika Analog dan Terpadu. Jakarta : Penerbit Universitas ndonesia (UI-PRESS)
Syahrul, 2012. Mikrokontroler AVR ATMEGA8535. Bandung : Penerbit Informatika
Tarigan, Pernanti. 2011.Sistem Tertanam (Embedded System). Yogyakarta :
Penerbit Graha Ilmu.
Wardhana, Lingga. 2006.Belajar Sendiri Mikrokontroler AVR Seri ATMega8535 Simulasi, Hardware, dan Aplikasi. Yogyakarta : Penerbit Andi Yogyakarta
54
http://mistherr.blogspot.com/2012/10/rangkaian-sensor-air-skema-rangkaian.html
Diakses Pada 27 Mei 2014, Pukul 02:37 a.m
http://skatel-xiv-121967.blogspot.com/2014/03/kelebihan-dan-kekurangan.html
Diakses Pada 27 Mei 2014, Pukul 02:50 a.m
http://electronics-madeeasy.blogspot.com/2010/12/ic-max232-for-interfacing-computer.html
55
LAMPIRAN 1
PROGRAM PADA MIKROKONTROLER ATMEGA 8535
/*******************************************************
Chip type : ATmega8535 Program type : Application Clock frequency : 11,059200 MHz Memory model : Small
External SRAM size : 0 Data Stack size : 128
*****************************************************/
#include <mega8535.h> #include <delay.h>
#define Level1 PINC.5 #define Level2 PINC.4 #define Level3 PINC.3 #define Level4 PINC.2 #define Level5 PINC.1 #define Level6 PINC.0 #define limit_buka PINC.6 #define limit_tutup PINC.7
#define buka PORTB.0 #define tutup PORTB.1
int data_serial, level;
56
#define FE 4 #define UDRE 5 #define RXC 7
#define FRAMING_ERROR (1<<FE) #define PARITY_ERROR (1<<UPE) #define DATA_OVERRUN (1<<OVR)
#define DATA_REGISTER_EMPTY (1<<UDRE) #define RX_COMPLETE (1<<RXC)
// USART Receiver buffer #define RX_BUFFER_SIZE 8 char rx_buffer[RX_BUFFER_SIZE];
#if RX_BUFFER_SIZE<256
unsigned char rx_wr_index,rx_rd_index,rx_counter; #else
unsigned int rx_wr_index,rx_rd_index,rx_counter; #endif
// This flag is set on USART Receiver buffer overflow bit rx_buffer_overflow;
// USART Receiver interrupt service routine interrupt [USART_RXC] void usart_rx_isr(void) {
char status,data; status=UCSRA; data=UDR;
if ((status & (FRAMING_ERROR | PARITY_ERROR | DATA_OVERRUN))==0)
57
rx_buffer[rx_wr_index]=data;
if (++rx_wr_index == RX_BUFFER_SIZE) rx_wr_index=0; if (++rx_counter == RX_BUFFER_SIZE)
{
rx_counter=0;
rx_buffer_overflow=1; };
data_serial=data; };
}
#ifndef _DEBUG_TERMINAL_IO_
// Get a character from the USART Receiver buffer #define _ALTERNATE_GETCHAR_
#pragma used+ char getchar(void) {
char data;
while (rx_counter==0); data=rx_buffer[rx_rd_index];
if (++rx_rd_index == RX_BUFFER_SIZE) rx_rd_index=0; #asm("cli")
--rx_counter; #asm("sei") return data; }
#pragma used-#endif
58
// Declare your global variables here
void main(void) {
// Declare your local variables here
// Input/Output Ports initialization // Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=Out Func0=Out
// State7=T State6=T State5=T State4=T State3=T State2=T State1=0 State0=0 PORTB=0x00;
DDRB=0x03;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=P State6=P State5=P State4=P State3=P State2=P State1=P State0=P PORTC=0xFF;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
59
PORTD=0x00; DDRD=0x00;
// Timer/Counter 0 initialization // Clock source: System Clock // Clock value: Timer 0 Stopped // Mode: Normal top=FFh // OC0 output: Disconnected TCCR0=0x00;
TCNT0=0x00; OCR0=0x00;
// Timer/Counter 1 initialization // Clock source: System Clock // Clock value: Timer 1 Stopped // Mode: Normal top=FFFFh // OC1A output: Discon. // OC1B output: Discon. // Noise Canceler: Off
60
OCR1BH=0x00; OCR1BL=0x00;
// Timer/Counter 2 initialization // Clock source: System Clock // Clock value: Timer 2 Stopped // Mode: Normal top=FFh // OC2 output: Disconnected ASSR=0x00;
TCCR2=0x00; TCNT2=0x00; OCR2=0x00;
// External Interrupt(s) initialization // INT0: Off
// INT1: Off // INT2: Off MCUCR=0x00; MCUCSR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization TIMSK=0x00;
// USART initialization
// Communication Parameters: 8 Data, 1 Stop, No Parity // USART Receiver: On
// USART Transmitter: On // USART Mode: Asynchronous // USART Baud Rate: 9600 UCSRA=0x00;
61
UBRRH=0x00; UBRRL=0x47;
// Analog Comparator initialization // Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off ACSR=0x80;
SFIOR=0x00;
// Global enable interrupts #asm("sei")
buka=0; tutup=0; while (1)
{
// Place your code here
if (Level1==0){level=1;} else {level=0;} if (Level2==0){level=2;}
if (Level3==0){level=3;} if (Level4==0){level=4;} if (Level5==0){level=5;} if (Level6==0){level=6;}
if (level==0){putchar(48);} if (level==1){putchar(49);} if (level==2){putchar(50);} if (level==3){putchar(51);} if (level==4){putchar(52);} if (level==5){putchar(53);} if (level==6){putchar(54);}
62
if (data_serial==50) {tutup=1; data_serial=0;}
if(limit_buka==0){buka=0;} if(limit_tutup==0){tutup=0;}
delay_ms(1000); };
63
LAMPIRAN 2
PROGRAM PADA VISUAL BASIC
Public Class Form1 Dim level As Integer
Dim cnn As New OleDb.OleDbConnection
Private Sub RefreshData()
If Not cnn.State = ConnectionState.Open Then cnn.Open()
End If
Dim da As New OleDb.OleDbDataAdapter("SELECT waktu, sensor FROM tabel1 ORDER BY waktu", cnn)
Dim dt As New DataTable da.Fill(dt)
Me.dgvData.DataSource = dt cnn.Close()
End Sub
Private Sub Form1_Load(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles MyBase.Load
SerialPort1.PortName = "COM4" SerialPort1.BaudRate = "9600"
SerialPort1.Parity = IO.Ports.Parity.None SerialPort1.StopBits = IO.Ports.StopBits.One SerialPort1.DataBits = 8
SerialPort1.Open()
cnn = New OleDb.OleDbConnection
cnn.ConnectionString = "Provider=Microsoft.Jet.Oledb.4.0; Data Source=" & Application.StartupPath & "\data.mdb"
64
End Sub
Private Sub Timer1_Tick(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles Timer1.Tick
Dim nilai As Integer
TextBox1.Text = SerialPort1.ReadExisting If TextBox1.Text <> "" Then
66
Private Sub Timer2_Tick(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles Timer2.Tick
Label13.Text = Format(Now, "dd MMMM yyyy") Label14.Text = Format(Now, "HH:mm:ss")
TextBox2.Text = Label13.Text & " " & Label14.Text End Sub
Private Sub database_Tick(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles database.Tick
Dim cmd As New OleDb.OleDbCommand If TextBox1.Text <> "" Then
If Not cnn.State = ConnectionState.Open Then cnn.Open()
End If
cmd.Connection = cnn
cmd.CommandText = "INSERT INTO tabel1(waktu, sensor) " & _ " VALUES('" & TextBox2.Text & "','" & level & "')" cmd.ExecuteNonQuery()
RefreshData() cnn.Close() End If
67
Private Sub Button1_Click(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles Button1.Click
SerialPort1.Write("1") End Sub
Private Sub Button2_Click(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles Button2.Click
SerialPort1.Write("2") End Sub