PROTOTIPE SISTEM PELACAK JEJAK KAPAL NELAYAN
PANCING TRADISIONAL SECARA OTOMATIS
MENGGUNAKAN VISUALISASI BERBASIS WEB
RAUZATUL NAZZLA
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
PERNYATAAN MENGENAI TESIS DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA*
Dengan ini saya menyatakan bahwa disertas berjudul Prototipe Sistem Pelacakan Jejak Kapal Nelayan Pancing Tradisional Secara Otomatis Menggunakan Visualisasi Berbasis Web adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir tesis ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
RINGKASAN
RAUZATUL NAZZLA. Prototipe Sistem Pelacak Kapal Nelayan Pancing Tradisional Secara Otomatis Menggunakan Visualisasi Berbasis Web. Dibimbing oleh TOTOK HESTIRIANOTO dan SRI PUJIYATI
Teknologi observasi otomatis ini berkembang seiring meningkatnya keperluan manusia akan suatu sistem yang dapat bekerja secara otomatis dan handal. Salah satu contohnya adalah dalam bidang navigasi, Automatic Tracking System adalah contoh navigation platform saat ini telah menjadi sebuah trend dunia dalam pengembangan teknologi navigasi yang merupakan salah satu kebutuhan bagi setiap alat transportasi baik darat, air, maupun udara.
Tujuan penelitian ini untuk mendesain dan menghasilkan sebuah instrumen pelacak sederhana yang sesuai untuk aplikasi di wilayah pesisir. Serta menghasilkan kualitas data yang baik. Penelitian ini mengadaptasi sistem penentuan posisi otomatis khususnya Vessel Monitoring System (VMS). Sistem sederhana ini dibangun dari dua unit perangkat yang terdiri dari pelacak (mobile radio tracker/transmitter) dan receiver (stasiun penerima). Instrumen elacak diletakkan pada sebuah wahana atau kendaraan yang memiliki kemampuan untuk bergerak. Instrumen pelacak ini terdiri dari modul (Global Positioning System) GPS yang berfungsi menerima informasi dan menghitung posisi pasti berdasarkan triangulasi beberapa satelit di ruang angkasa. Data posisi dikirim menuju perangkat stasiun darat atau receiver dengan bantuan sepasang modul Radio Frequency (RF) yang saling berkomunikasi jarak pendek secara nirkabel. Instrumen pelacak ini menggunakan mini akumulator 6 volt dan receiver hanya memanfaatkan daya yang berasal dari laptop. Terdapat dua uji dilakukan untuk menentukan kualitas data keluaran: (1) uji coba stasioner, dimana platform mobile dipertahankan pada lokasi yang tetap di area terbuka untuk memeriksa presisi dari sinyal GPS, dan (2) uji coba mobile (bergerak) dimana platform bergerak untuk memeriksa tingkat kesesuaian dinamis.
Penelitian ini menghasilkan sebuah perangkat transmitter dan receiver yang beroperasi dengan akumulator bervoltase 6 V dan arus 25 mAh yang mampu beroperasi selama 180 jam. Uji coba performa alat menunjukkan bahwa hasil pengukuran sesuai dengan spesifikasi yang disediakan tiap komponen elektronika. Hasil perhitungan memperlihatkan bahwa durasi berpengaruh terhadap nilai Distance Root Means Square (DRMS) dan Horizontal Dilution of Precision (HDOP). Nilai DRMS ini menurun terhadap waktu dan mendekati nilai terkecil atau mendekati titik acuan. Nilai HDOP pada tiga perlakuan tergolong baik. Hasil DRMS dan HDOP yang terbaik adalah pada saat GPS menerima sinyal tanpa obstruksi. Selain itu, kedua nilai bersifat linear satu sama lain. Hal ini disebabkan faktor-faktor penentu besar kecil nilai tersebut kurang lebih sama. Radio tracker ini melakukan pelacakan jejak secara otomatis kapanpun alat ini dinyalakan. Alat ini sensitif dalam merespon dan secara cepat melakukan perekaman setiap pergerakan dan dapat diaplikasikan di wilayah pesisir dengan menambahkan panjang antena agar perambatan gelombang menjadi optimal.
SUMMARY
RAUZATUL NAZZLA, A Prototype of Automatic Tracking System for Traditional Boat Using Web-Based Visualization. Supervised by TOTOK HESTIRIANOTO and SRI PUJIYATI
Automatic observation technology is growing with increasing human needs to be a system that can work automatically and reliably. One example is in the field of navigation, Automatic Tracking System is an example of Navigation Platform has now become a worldwide trend in the development of navigation technologies which is one requirement for any means of transportation by land, water or air.
The purpose of this study to design and produce a simple tracker and good data quality that is suitable for applications in coastal areas. This study adapted the automatic positioning systems, especially Vessel Monitoring System (VMS). This simple system is constructed from two units of the device that consists of a transmitter (mobile radio tracker) and receiver (ground station). Tracker is placed on a vehicle that has the ability to move. Tracker consists of a Global Positioning System (GPS function to receive information and calculates the exact position by triangulation several satellites in space. Position data is sent to the ground station or receiver device with the aid of a pair of (Radio Frequency) RF modules that communicate with each other over short distances wirelessly. Tracker uses mini accumulator and receiver only utilize the power coming from the laptop. There are two tests were conducted to determine the quality of output data: (1) the trial is stationary, wherein the mobile platform is maintained at a fixed location in the open area to check the precision of the GPS signal, and (2) test mobile in which the moving platform to check dynamic conformance level.
This study resulted in a transmitter and a receiver device that operates using a accumulator with voltage 6 V and current 25 mAh capable of operating for 180 hours. The trials showed that the results of performance measurement tool in accordance with the specifications provided for each electronic component. The calculation result shows that the duration influences on the value DRMS and HDOP. DRMS value decreases with time and approached the smallest value at or near the point of reference. HDOP value on three experiments shows relatively good category. Results of DRMS and HDOP are best when the GPS receives the signal without a hitch or obstruction. In addition, both values are linear with one another. This is due to major determinants of the value almost the same. The radio tracker tracking trail automatically whenever the tool is turned on. The tool is sensitive in responding rapidly and recording every movement and can be applied in coastal areas by adding the height of the antenna to be optimal propagation.
© Hak Cipta Milik IPB, Tahun 2016
Hak Cipta Dilindungi Undang-Undang
Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumbernya. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik, atau tinjauan suatu masalah; dan pengutipan tersebut tidak merugikan kepentingan IPB
Tesis
sebagai salah satu syarat untuk memperoleh gelar Magister Sains
pada
Program Studi Teknologi Kelautan
PROTOTIPE SISTEM PELACAK JEJAK KAPAL NELAYAN
PANCING TRADISIONAL SECARA OTOMATIS
MENGGUNAKAN VISUALISASI BERBASIS WEB
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
BOGOR 2016
Judul Tesis : Prototipe Sistem Pelacak Jejak Kapal Nelayan Pancing Tradisional secara Otomatis Menggunakan Visualisasi Berbasis Web
Nama : Rauzatul Nazzla NIM : C552114011
Disetujui oleh Komisi Pembimbing
Dr Ir Totok Hestirianoto, MSc Ketua
Dr Ir Sri Pujiyati, MSi Anggota
Diketahui oleh
Ketua Program Studi Teknologi Kelautan
Dr Ir Jonson Lumban Gaol, MSi
Dekan Sekolah Pascasarjana
Dr Ir Dahrul Syah, MScAgr
Tanggal Ujian: 29 Januari 2016
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah subhanahu wa ta’ala atas segala karunia-Nya sehingga karya ilmiah ini berhasil diselesaikan. Tema yang dipilih dalam penelitian yang dilaksanakan sejak bulan Januari 2014 ini ialah teknologi radio frekuensi dan GPS yang diaplikasikan pada wilayah pesisir.
Terima kasih penulis ucapkan kepada Bapak Dr Ir Totok Hestirianoto dan Ibu Dr Ir Sri Pujiyati selaku pembimbing, serta Bapak Dr Ir Indra Jaya dan Dr Jonson Lumban Gaol yang telah banyak memberi saran. Ungkapan terima kasih juga disampaikan kepada ayah, ibu, serta seluruh keluarga, atas segala doa dan kasih sayangnya.
Semoga karya ilmiah ini bermanfaat.
DAFTAR ISI
DAFTAR TABEL vii
DAFTAR GAMBAR vii
DAFTAR LAMPIRAN viii
1 PENDAHULUAN 1
Latar Belakang 1
Kerangka Pemikiran 3
Perumusan Masalah 3
Tujuan Penelitian 4
Manfaat Penelitian 4
Ruang Lingkup Penelitian 4
2 METODE 5
Waktu dan Tempat 5
Bahan 6
Transceiver Radio Frequency 6
Modul Global Positioning System (GPS) 7
Arduino Nano sebagai Controller Board 10
Power Supply 10
Antena 11
Alat 11
Google Earth 11
Gambaran Umum Penelitian 12
Perakitan Piranti 16
Kualitas Data Keluaran 17
Tahapan Uji Lapang 20
Mengukur Signal Strength 22
Penyimpanan Data 23
Tahapan Pengolahan Data 23
3 HASIL DAN PEMBAHASAN 24
Deskripsi Umum Hasil Penelitian 24
Rangkaian Elektronik 25
Penggunaan Perangkat Lunak 27
Analisis Data 27
Uji Coba Stasioner 29
Uji Coba Daya Jangkau RF Outdoor 38
Signal Strength 40
Uji Coba Mobile 41
4 SIMPULAN DAN SARAN 46
Simpulan 46
Saran 47
DAFTAR PUSTAKA 47
LAMPIRAN 50
DAFTAR TABEL
1 Karakteristik modul GPS yang dipadukan dengan RF 8
2 Alokasi frekuensi radio 433 MHz 13
3 Nilai konsumsi daya pada saat kedua perangkat dioperasikan 26 4 Parameter paket data dalam proses transfer dari Tx dan Rx 30
5 Data Koordinat 30
6 Data Rataan HDOP dan DRMS Berdasarkan Kelompok Waktu pada Area Tertutup (Perlakuan 1 dengan Obstruksi Gedung) 31 7 Data Rataan HDOP dan DRMS Berdasarkan Kelompok Waktu pada
Area Tertutup (Perlakuan 2 dengan Obstruksi Vegetasi) 34 8 Data Rataan HDOP dan DRMS Berdasarkan Kelompok Waktu pada
Area Terbuka (Perlakuan 3 Tanpa Obstruksi) 37
9 Sumber Kesalahan pada Saat Penentuan Posisi GPS 38 10 Nilai Signal Strength Berupa RSSI dan radius pada zona Fresnel 41 11 Data Titik Koordinat Antara Data NMEA dari prototipe dan GPS
handheld 44
12 Biaya Implementasi Prototipe Sistem Pelacak Kapal yang
dikembangkan 46
DAFTAR GAMBAR
1 Wahana Uji Coba di Area Palabuhan Ratu 5
2 Sketsa RF bertipe YS-1020 7
3 PMB-648 Parallax (a) Tampak atas, (b) Tampak samping dan
konfigurasi pin 8
4 Alur pembacaan data GPS 9
5 Konfigurasi Arduino Nano 10
6 Persentase dari visualisasi geografis yang direalisasikan oleh peta
secara spesifik 12
7 Ilustrasi Maritime Surveillance yang Ideal 13
8 Ilustrasi Aplikasi Web 14
9 Flowchart Tahapan Penelitian 15
10 Skema fungsional perangkat elektronika 16
11 Rangkaian Elektronika 16
12 Ilustrasi dari presisi dan akurasi 18
13 Grafik Distribusi Rayleigh untuk Distance/RMS vs Probability 18
14 Alur Ujicoba Lapang 20
15 Ilustrasi Ujicoba Lapangan 20
16 Ilustrasi Fresnel Zone 21
17 Ilustrasi Pengukuran Kuat Sinyal 23
18 Alur Pengolahan Data 24
19 Hasil Rancang Bangun Tracker dan Receiver 25
20 Software Data Logger 27
21 Contoh Data Mentah Hasil Rekam Tracker 28
23 Grafik Hubungan antara durasi perekaman dengan DRMS di Area
Tertutup (Obstruksi: Gedung) 32
24 Grafik Sebaran Nilai Minimum dan Maksimum di Area Tertutup
(Obstruksi: Gedung) 33
25 Grafik Hubungan antara durasi perekaman dengan DRMS di Area
Tertutup (Obstruksi: Vegetasi) 34
26 Grafik Sebaran Nilai Minimum dan Maksimum di Area Tertutup
(Obstruksi: Vegetasi) 35
27 Grafik Hubungan antara durasi perekaman dengan DRMS Area
Terbuka (tanpa obstruksi-open sky) 36
28 Grafik Sebaran Nilai Minimum dan Maksimum di Area Tertutup (tanpa
obstruksi-open sky) 37
29 Grafik Hubungan Jarak dan DRMS 40
30 Visualisasi Uji Coba Piranti Bergerak 40
31 Hasil Plotting Percobaan Signal Strength dengan Google Earth 40
32 Hasil Uji Coba Mobile 42
33 Ilustrasi Pengambilan Data di Wilayah Pesisir 43 34 Hasil Percobaan Mobile pada Nelayan Pancing Tradisional di Pantai
Palabuhan Ratu 45
DAFTAR LAMPIRAN
1 Spesifikasi dan Konfigurasi Transceiver YS-1020 50
2 Spesifikasi dan Konfigurasi GPS PMB-648 50
3 Pesan Keluaran NMEA 51
4 Spesifikasi dan Konfigurasi Arduino Nano 52
5 Sintaks Pemrograman 53
1
PENDAHULUAN
Latar Belakang
Kelautan adalah tumpuan masa depan Indonesia yang harus dikembangkan secara lestari dan mampu mensejahterakan segenap komponen bangsa di tanah airnya sendiri serta sebagai unsur utama dalam membangun Indonesia sebagai Negara Maritim. Visi kelautan adalah visi dalam mendayagunakan sumberdaya dan fungsi laut secara berkelanjutan untuk kemakmuran bangsa. Visi Kelautan tersebut digunakan untuk menyatukan pembangunan yang berwawasan ke dalam (inward looking) yakni mengembangkan kemajuan nusantara dan negara kepulauan dan wawasan ke luar (outward looking) yakni mengembangkan berbagai kemampuan bangsa untuk menguasai potensi laut secara global sesuai peraturan internasional untuk kemakmuran bangsa Indonesia (Kusumastanto, 2015).
Selaras dengan visi tersebut, teknologi observasi laut perlu menyumbangkan kontribusi pada pembangunan negara kepulauan berciri nusantara yang mengikuti perkembangan zaman. Teknologi observasi otomatis ini berkembang seiring meningkatnya keperluan manusia akan suatu sistem yang dapat bekerja secara otomatis dan handal. Salah satu contohnya adalah dalam bidang navigasi. Automatic Tracking System adalah contoh Navigation Platform saat ini telah menjadi sebuah trend dunia dalam pengembangan teknologi navigasi (Park et al., 2013) yang merupakan salah satu kebutuhan bagi setiap alat transportasi baik darat, air, maupun udara.
Ada beberapa contoh Navigation Platform yang telah berkembang dan diaplikasikan di berbagai belahan dunia. Beberapa diantaranya Automatic Positioning System, Automatic Identification System (AIS), Vessel Monitoring System (VMS), Vessel Traffic System (VTS), dan sebagainya. Semua jenis navigation platform itu berawal dari MONICAP (www.monicap.com) yang pertama kali dikembangkan di Portugal pada tahun 1988 (Nolan, 1999). Kemudian diikuti oleh beberapa negara di Uni Eropa. Inisiatif ini merupakan langkah antisipasi terhadap degradasi hasil tangkapan ikan baik dari sisi kuantitas maupun ukuran individu serta untuk riset terhadap biomassa dari suatu spesies.
VMS pada saat ini merupakan sebuah kebutuhan khusus yang penting untuk dikembangkan agar dapat memenuhi kebutuhan yang berbeda di setiap isu dalam manajemen perikanan. Visi pengembangan VMS adalah untuk meningkatkan manajemen dan keberlanjutan lingkungan laut. Strategi yang diterapkan adalah penyelenggaraan program pemantauan, pengendalian, dan pengawasan praktek penangkapan ikan yang tepat dan pencegahan illegal fishing. Secara khusus VMS dimaksudkan untuk memantau kapal di wilayah perairan suatu negara atau subdivisi negara, atau di Zona Ekonomi Eksklusif (ZEE) sepanjang 200 mil laut (370,4 km) dari pantai (Nolan, 1999)
2
kapal jarak jauh memanfaatkan ponsel pintar dan aplikasi Google Map. Javier and Aquado (2012) dan Moreira et al. (2014) melakukan penelitian mengenai sistem keamanan lalu lintas kapal dengan menggunakan kamera dalam perangkat pelacakan jejak kapal atau dikenal dengan VTS. Sementara Chen et al. (2013) melakukan penghitungan performa VTS dengan proses Analytic Hierarchy dan Grey Interval. Tidak hanya untuk aplikasi di bidang manajemen perikanan, produk monitoring ini juga dapat dimanfaatkan dalam manajemen lingkungan. Contohnya penelitian Schwehr (2011) yang memanfaatkan AIS untuk mempelajari tumpahan minyak.
Berkembangnya penelitian yang berkaitan dengan VMS dan AIS ini karena operasi sistem surveilans manual terkadang tidak efisien. Hal ini disebabkan keterbatasan manusia seperti kelelahan, stres dan keterbatasan manusia untuk melakukan tugas tertentu. Pengembangan sistem otomatis untuk pengawasan maritim adalah penting untuk mengurangi terjadinya peristiwa yang tidak diinginkan. Selain sisi efektifitas dan efisiensi fungsinya, pengembangan sistem surveilans ini juga mengarah pada sebuah sistem yang sederhana dan murah. Sebagaimana penelitian yang dilakukan Sudharsan and Katta (2012) yang memanfaatkan GPS untuk mengumpulkan informasi lokasi dan mengirim data dengan Xbee untuk mengetahui posisi terakhir dari kapal penangkap ikan. Sebagian besar sistem yang telah tersedia mengikuti GPS yang berbasis GPRS dilengkapi data logger, dimana pengumpulan data dilakukan setiap interval tertentu dan dikirimkan sesuai remote server yang dituju.
Beberapa produsen tracker VMS saat ini diantaranya Blue Tracker (http://www.bluetraker.com/products/bluetraker-r-vms/). The BlueTraker® VMS adalah generasi terbaru dari terminal satelit kelautan secara khusus dikembangkan untuk memantau kapal-kapal nelayan di dalam dan di luar Uni Eropa. BlueTraker® VMS dikenal untuk desain terpadu, menggabungkan semua elektronika satu wahana: Central Processing Board; GPS receiver; Modem GPRS; Modem iridium atau baterai isi ulang. Beberapa “pemain lokal” yang menyediakan produk VMS adalah PT. CLS ARGOS yang dapat diakses pada website http://www.clsargos.co.id/product; PT. SOG http://www.pt-sog.com; dan PT. Pasifik Satelite Nusantara http://www.psn.co.id.
Hampir 80% nelayan kita masuk kategori nelayan kecil dan tradisional. Kelompok nelayan ini hanya memiliki kapal penangkap ikan berkapasitas kurang dari 30 gross ton (GT). Dengan kapasitas ini nelayan hanya mampu menangkap ikan paling jauh 4 mil dari garis pantai, sedangkan perairan di atas 4 – 12 mil hanya bisa dijangkau oleh kapal-kapal berkapasitas di atas 30 GT. Berdasarkan data statistik BPS, pada tahun 2013, jumlah kapal tanpa motor di seluruh Indonesia sebanyak 226.573 unit, lebih banyak dibandingkan kapal dengan motor sebanyak 3.917 unit.
3 penerapan VMS. Hasil analisis Game Theory yang dilakukan Hartono (2007) ini, menunjukkan bahwa Model Strategi Sistem Pembebanan Biaya VMS memberikan hasil yang maksimal bagi pemerintah dan pengeluaran biaya yang minimal bagi pengusaha. Jika dibandingkan dengan negara Peru, pungutan biaya usaha perikanan di Indonesia termasuk mahal. Di Peru untuk seluruh biaya (Izin, Alat VMS, Airtime, dan pemeliharaan) adalah sebesar $200.
Pengadaan VMS bagi kapal 30 GT akan menyerap biaya yang tidak sedikit. Tidak dapat disangkal bahwa harga yang mahal merupakan sebuah konsekuensi dari tingginya kualitas suatu produk. Namun dengan memanfaatkan sumberdaya dan biaya yang terbatas, diharapkan prototipe ini dapat mendekati fungsi VMS yang diinginkan. Berangkat dari informasi yang telah dijabarkan sebelumnya, peneliti memiliki alasan mendasar untuk membangun sebuah VMS sederhana memanfaatkan teknologi komunikasi Radio Frekuensi (RF).
Dalam membangun sebuah prototipe diperlukan beberapa pertimbangan. Penentuan pilihan dilakukan berdasarkan karakteristik perangkat. Dengan tidak lupa mempertimbangkan ketersediaan produk di pasaran beserta ketersediaan dananya. Ada beberapa pengembangan GPS di Indonesia. Untuk bidang observasi laut di Indonesia, salah satu diantaranya adalah drifter buoy yang dilengkapi dengan modul GPS dan modul GSM. Pada penelitian Iqbal (2011), modul GPS ditanamkan pada sebuah wahana yang mengapung dan bergerak menuruti arus guna mengumpulkan data oseanografi berupa suhu permukaan laut. Sementara Withamana (2013) merancang beberapa buoy yang saling berkomunikasi membentuk sebuah jaringan RF.
Kerangka Pemikiran
Penelitian ini mengadaptasi sistem penentuan posisi otomatis yang
diterapkan pada Automatic Positioning System khususnya VMS. Sistem
sederhana ini dibangun dari dua unit perangkat yang terdiri dari tracker (mobile
radio tracker) dan receiver (stasiun darat). Tracker diletakkan pada sebuah
wahana atau kendaraan yang memiliki kemampuan untuk bergerak. Tracker
terdiri dari GPS receiver yang berfungsi menerima informasi dan menghitung
posisi pasti berdasarkan triangulasi beberapa satelit di ruang angkasa. Data posisi
dikirim menuju perangkat stasiun darat atau receiver dengan bantuan sepasang
modul RF yang saling berkomunikasi jarak pendek secara nirkabel. Data NMEA berasal dari GPS kemudian disimpan dalam sebuah perangkat komputer ataupun
smartphone untuk dilakukan pasca pemrosesan.
Perumusan Masalah
4
bidang keteknikan. Saat ini para peneliti masih berusaha mengembangkan teknologi yang tepat untuk berbagai kebutuhan terkait aktivitas kemaritiman.
Seiring dengan perkembangan teknologi saat ini, penggunaan peta dan kompas mulai banyak digantikan dengan alat bantu navigasi lain yang bernama Global Positioning System, atau biasa disebut sebagai GPS. Ini adalah suatu sistem navigasi yang menggunakan satelit, dikembangkan sejak tahun 1970-an oleh Departemen Pertahanan Amerika Serikat, yang pada awalnya diperuntukkan hanya untuk keperluan militer. Dalam perkembangan selanjutnya, GPS tidak hanya digunakan oleh militer dan terus mengalami penyempurnaan yang pesat hingga sekarang sebagai alat bantu transportasi.
Penelitian ini mencoba melakukan perancangan instrumen pelacak ekonomis dengan mengikuti tipe desain Automatic Identification System (AIS) atau Vessel Monitoring System (VMS) yang disesuaikan dengan alat dan bahan yang tersedia dengan harga terjangkau di Indonesia. Sensor yang digunakan yaitu GPS sebagai sensor posisi dan RF sebagai wahana pengiriman data tanpa kabel. Sementara perangkat pengendalinya adalah sebuah papan sirkuit Arduino yang berbasis Atmega 168. Instrumen pelacak ini memanfaatkan gelombang radio yang pada umumnya dapat menjangkau di setiap wilayah yang tidak memiliki sinyal GSM. Hipotesis yang akan dibuktikan adalah komponen elektronika GPS dan mikrokontroler serta bahan material yang tersedia di pasaran dapat dibuat menjadi instrumen pelacak yang mampu memetakan pola pergerakan kapal jarak pendek.
Tujuan Penelitian
Tujuan dari penelitian ini adalah mendesain sampai menghasilkan prototipe sistem pelacakan jejak kapal otomatis yang mampu menghasilkan data keluaran yang baik. Selain itu perolehan data dianalisis untuk mengetahui perbandingan antara parameter yang diukur.
Manfaat Penelitian
Penelitian ini diharapkan dapat memberikan kontribusi terhadap pengembangan ilmu pengetahuan dan teknologi terutama dari aspek teknis ilmiah dalam upaya pengelolaan sumberdaya pesisir yang berkelanjutan yang diharapkan dapat memberikan informasi dan gambaran terkait aktivitas nelayan pancing di Indonesia. Serta dapat diaplikasikan pengetahuan dan teknik yang digunakan dalam kehidupan sehari-hari.
Ruang Lingkup Penelitian
5
2
METODE
Waktu dan Tempat
Penelitian ini akan dilaksanakan mulai bulan Januari 2014 sampai November 2015. Proses penelitian yang meliputi perakitan instrumen, pengolahan data dan pembuatan tampilan dilaksanakan di Laboratorium Instrumentasi dan Telemetri Kelautan FPIK IPB. Sementara uji skala laboratorium dilaksanakan di area Kampus IPB Dramaga dan pengumpulan data lapangan dilakukan di seputaran Pelabuhan Perikanan Nusantara, Palabuhan Ratu (Gambar 1).
Gambar 1. Wahana Uji Coba di Area Palabuhan Ratu
Sekitar 90 persen nelayan di Palabuhan Ratu adalah nelayan tradisional salah satunya adalah nelayan pancing. Nelayan pancing tradisional adalah nelayan yang mengunakan teknologi penangkapan dengan alat pancing sederhana, yaitu peralatan penangkapan ikan dioperasikan secara manual dengan tenaga manusia. Wahana yang digunakan nelayan pancing adalah perahu layar dan motor tempel yang keduanya berkapasitas 5 gros ton (GT). Namun tidak menutup kemungkinan untuk menggunakan peralatan navigasi. Kemampuan jelajah operasional terbatas pada perairan pesisir terutama pantai.
6
Bahan
Bahan-bahan utama yang dibutuhkan adalah sepasang RF transceiver, satu modul GPS, satu controller board, dan satu unit laptop atau ponsel cerdas. Perangkat pemancar/pengirim data tersusun dari satu unit RF Data Transceiver dan satu unit GPS. Modul GPS tipe PMB-648, untuk menampilkan data waktu dan tanggal pengambilan, posisi (lintang dan bujur), kecepatan alat dan ketinggian dari alat.
RF Data Transceiver YS-1020UB ini berfungsi sebagai pengirim data serial melalui media udara. Alat ini melakukan proses penumpangan data serial digital ke frekuensi pembawa dengan frekuensi yang lebih tinggi untuk kemudian dipancarkan ke udara oleh pemancar. Pada penerima frekuensi pembawa yang mengandung data ditangkap dan dipisahkan dari data yang dibawa. Modul YS-1020UB Wireless Data Transceiver mengirimkan dan menerima data serial melalui media udara, dengan frekuensi 433 MHz ISM band dan baud rate air sebesar 4800 bps. Modul tersebut bekerja dengan suplai daya antara 3,3 sampai 5 VDC yang berasal dari aki kering.
Perangkat penerima tersusun dari RF transceiver yang dihubungkan dengan Arduino Nano V.03 sebagai komunikasi serial untuk receiver pada YS-1020UB, kabel USB untuk menyambungkan dari alat Arduino Nano V.03 dengan laptop atau smartphone, LED sebagai indikator sistem kerja alat.
Transceiver Radio Frequency
Salah satu alasan mengapa desain RF front-end menjadi pilihan adalah disebabkan kinerja noise yang telah menjadi bagian yang sangat penting dari spesifikasi tingkat tinggi transceiver RF. Tidak seperti sirkuit digital di mana suara berada di urutan kedua, kebisingan di sirkuit RF langsung mempengaruhi kinerja sistem atau disebut dengan rasio sinyal terhadap kebisingan atau Signal to Noise Ratio (SNR) atau tingkat kesalahan keseluruhan bit (BER). Kebisingan juga mempengaruhi bagaimana sistem degradasi SNR terhadap yang saluran sinyal. Di jalur transmisi, itu mempengaruhi seberapa banyak kekuatan suara sistem ini bocor ke saluran yang berdekatan.
Suara mengacu pada setiap perubahan yang tidak diinginkan dalam sinyal di sirkuit. Misalnya, dalam rangkaian digital, suara mengacu pada setiap penyimpangan sinyal dari logika nol (yang biasanya adalah 0 V) atau logika satu (yang biasanya adalah VDD tegangan suplai). Dalam rangkaian RF, kebisingan mengacu pada setiap sinyal yang tidak diinginkan digabungkan ke sirkuit serta sinyal yang tidak diinginkan yang dihasilkan oleh perangkat sendiri.
7 4800 bps dan Serial Interface sebesar 1200-115200 bps serta jarak jangkau antara 10-150 m.
Transceiver merupakan sepasang atau lebih perangkat komunikasi nirkabel, terutama yang menggunakan gelombang radio sebagai penghantar pesan. Ada banyak jenis yang berbeda dari jaringan RF dengan berbagai kelebihan dan kekurangan. Hal-hal utama yang perlu dipertimbangkan ketika memilih metode komunikasi nirkabel adalah topologi jaringan, data rate dan konsumsi daya.
Modul YS-1020 seri daya rendah RF dirancang untuk sistem transmisi data UART profesional dalam jarak dekat. YS-1020 merupakan hasil adaptasi dari instrumen texas (Chipcon) CC1020 RF IC, bekerja pada pita frekuensi ISM, half-duplex terintegrasi sebagai pemancar dan penerima. Modul bisa langsung terhubung dengan prosesor monolitik, PC, perangkat RS485, dan komponen lain dengan UART RS-232, RS-485 dan UART / TTL interface port. Gambar 2 merupakan sketsa RF bertipe YS-1020. Spesifikasi dapat dilihat pada Lampiran 1.
Gambar 2. Sketsa RF transceiver bertipe YS-1020
Modul Global Positioning System (GPS)
8
Tabel 1. Karakteristik modul GPS yang dipadukan dengan RF
TS (tahun tidak diketahui), dapat diunduh dari http://www.instrumen pelacaksecurity.com/pdf/RF-GPS-Tracking-Tech.pdf
Kalimat ditransmisikan sesuai dengan baudrate yang dipilih pengguna. Unit GPS mentransmisikan setiap kalimat (kecuali dicatat dalam deskripsi kalimat tertentu) pada tingkat periodik berdasarkan baud rate kalimat output yang dipilih pengguna. Unit GPS mentransmisikan kalimat yang dipilih secara terus menerus. Kalimat NMEA masing-masing menyimpan informasi kondisi sinyal dan satelit.
Gambar 3. PMB-648 Parallax (a) Tampak atas, (b) Tampak samping dan konfigurasi pin
Gambar 3 terlihat bahwa ada 4 pin yang digunakan yaitu VCC (kaki 3), GND (kaki 4), TTL RX (kaki 2) dan TTL Tx (kaki 1). Komunikasi dengan mikrokontroler digunakan komunikasi null-modem sehingga kaki 2 dan kaki 1 modul PMB-648 dihubungkan dengan PA.4 dan PA.5 mikrokontroler ATMega32. VCC yang digunakan yaitu VCC 5 Volt. PMB-648 memiliki antena internal dimana tipe ini memiliki daya tangkap sinyal yang cukup baik dan masih mampu mendapatkan sinyal secara baik meskipun ditutup bahan tipis seperti baja ataupun acrilyc.
GPS tipe PMB-648 ini memiliki spesifikasi dapat mengirimkan data hingga ketinggian 18.000 m dan kecepatan hingga 515 m/s. Penelitian ini menggunakan NMEA $GPRMC sebagai data yang akan diambil dari beberapa kalimat NMEA yang dikirimkan oleh receiver GPS. NMEA ini dikirimkan setiap 1 detik (http://www.nmea.org), sehingga dalam proses pembacaan data diperlukan proses pembacaan berulang-ulang (loop). Pembacaan berurut dimulai dengan mendeteksi penanda $GPRMC apakah sudah diterima atau tidak kemudian karakter selanjutnya dianggap sebagai waktu dan seterusnya, delimiter format data
$GPRMC ini menggunakan karakter koma (“,”). Gambar 4 menunjukkan diagram alir dari pembacaan data pada GPS. Pembacaan berurut dilakukan karena data keluaran dari modul GPS dalam bentuk serial. Kecepatan pengiriman data serial
Jenis Modul Keunggulan Kekurangan
9 ini yaitu 4800 bps sesuai dengan kecepatan default dari GPS yang digunakan. Proses perangkat lunak di modul ini sangat bergantung dari kualitas data yang diberikan oleh GPS, pada beberapa percobaan tertentu data yang dikeluarkan oleh GPS tidak memiliki karakter (null character), tetapi tanda pembatas tetap dikeluarkan. Gambar 4 berikut alur algoritma yang diimplementasikan dalam penggunaan GPS. Spesifikasi modul GPS dan kode NMEA dapat dilihat pada Lampiran 2 dan 3.
Gambar 4. Alur pembacaan data GPS
Jumlah maksimum yang diperbolehkan dalam satu kalimat adalah 82 karakter termasuk pembuka dan penutup. Nilai dalam tabel termasuk kalimat pembuka dengan karakter "$" dan penutup <CR> <LF>. Produsen telah membuat default-nya untuk hasil transmisi hanya sekali tiap detik untuk baudrate 4800 bps. Beberapa produk Garmin menerapkan konsep one-pulse-per second. Terlepas dari
ya Mulai
For i=1:16 Apakah “$GPRMC”?
Hingga Karakter “,” ya
Susun teks sebagai Waktu
Hingga Karakter “,” ya
Susun teks sebagai Longitude Susun teks sebagai
Latitude
tidak
Hingga Karakter “,”
tidak
tidak
tidak ya
ya
10
baud rate yang dipilih, informasi yang dikirimkan oleh sensor GPS dirujuk ke pulsa output satu-pulsa-per-detik segera sebelum kalimat GPRMC.
Arduino Nanosebagai Controller Board
Arduino Nano adalah platform kecil yang lengkap dan user-friendly berdasarkan ATmega328 (Arduino Nano 3.x) atau ATmega168 (Arduino Nano 2.x). Fungsinya kurang-lebih sama seperti Arduino Duemilanove, tetapi dalam paket yang berbeda. Hanya membutuhkan listrik DC, dan bekerja dengan kabel USB Mini-B. Nano dirancang dan diproduksi oleh Gravitech. Arduino Nano memiliki sejumlah fasilitas untuk berkomunikasi dengan komputer, Arduino lain, atau mikrokontroler lainnya. ATmega168 dan ATmega328 menyediakan UART TTL (5V) komunikasi serial, yang dapat ditemukan pada pin digital 0 (RX) dan 1 (TX). Sebuah FTDI FT232RL pada saluran papan komunikasi ini serial melalui USB dan driver FTDI (termasuk dengan software Arduino) menyediakan port com virtual untuk perangkat lunak pada komputer. Perangkat lunak Arduino termasuk monitor serial yang memungkinkan data tekstual sederhana yang akan dikirim ke dan dari papan Arduino. RX dan TX LED di papan akan berkedip ketika data sedang dikirim melalui chip FTDI dan USB koneksi ke komputer (tetapi tidak untuk komunikasi serial pada pin 0 dan 1). Library pada Software Serial memungkinkan komunikasi serial pada setiap pin digitalnya. Arduino Nano dapat diprogram dengan menggunakan software khusus Arduino yang open source. Berikut konfigurasi pin Arduino Nano (Gambar 5). Spesifikasi lengkap dapat dilihat pada Lampiran 4.
Gambar 5. Konfigurasi Arduino Nano
Power Supply
11 Instrumen pelacak menggunakan mini akumulator 6 volt dan receiver hanya memanfaatkan daya yang berasal dari laptop. Hal ini disebabkan Arduino Nano dapat diaktifkan melalui koneksi USB Mini-B, 6-20V catu daya eksternal (pin 30) tanpa regulator, atau 5V catu daya eksternal dengan regulator (pin 27). Sumber daya secara otomatis dipilih untuk sumber tegangan tertinggi. Dengan penggunaan IC Arduino ini, penggunaan daya dapat diminimalisir.
Antena
Dalam sebuah sirkuit RF, antenna merupakan bagian yang tak terpisahkan. Sebuah elemen antenna yang secara tipikal tidak diasosiasikan dengan amplifier dan filter disebut passive device. Tidak ada proses pengkondisian, penguatan, atau manipulasi sinyal oleh elemen antenna itu sendiri. Dari bentuk fisiknya, sebuah antenna dapat mempengaruhi proses penguatan (amplification).
Komunikasi digital lebih sensitif dibandingkan komunikasi analog / suara disebabkan gangguan yang ditimbulkan oleh refleksi akibat adanya penghalang. Sementara itu, kabel yang digunakan semestinya anti air dan memiliki panjang seminimal mungkin untuk meminimalisir atenuasi. Kabel antena yang terinstal mesti terpisah dengan kabel catu daya minimal 10 cm.
Alat
Peralatan yang dibutuhkan dalam penelitian ini meliputi proses pembuatan dan uji coba di lapang. Dalam proses pembuatan instrumen dibutuhkan peralatan seperti solder, pemotong kabel, dan perangkat lunak untuk pemrograman Arduino-compatible boards yang bersifat open-source. Sementara pembuatan user interfacenya menggunakan alat berupa komputer yang dioperasikan dengan software Windows atau Linux. Selain itu dibutuhkan pula software offline Matlab serta software online Google Earth.
Google Earth
12
Sumber: (Dimitrova, 2013)
Gambar 6. Persentase dari visualisasi geografis yang direalisasikan oleh peta secara spesifik.
Google Earth adalah sebuah program globe virtual, yang memungkinkan pemirsa untuk memvisualisasikan data di atas gambar satelit yang ditampilkan dari suatu permukaan bumi. Diluncurkan pada tahun 2005 dan dirilis ke publik pada tahun 2006, Google Earth berkembang cepat dan dipuji sebagai revolusi untuk pembangunan kemanusiaan, sebagaimana Sistem Informasi Geografis (GIS) beberapa dekade yang lalu (MC, 2008).
Sebagai program geospasial yang diinstal pada komputer, pengguna Google Earth memiliki akses ke citra secara detail sesuai daerah yang dipilih dengan cara menyorot dan memperbesar ukuran. Google Earth memungkinkan pengguna untuk menggunakan aplikasi tanpa koneksi internet, namun fungsi menjadi terbatas, yaitu citra satelit menjadi beresolusi rendah dan hanya dapat menggunakan citra cache pada komputer berdasarkan penyimpanan terakhir asalkan disimpan dalam file KML (Keyhold Markup Language). Google memulai program 'Google Earth Outreach' pada tahun 2007 untuk membantu AS dan organisasi nirlaba yang berbasis di Eropa menggunakan Google Earth dan Maps dalam pekerjaan mereka. Program ini menyediakan tutorial dan studi kasus secara online, pemberian lisensi Google Earth Pro untuk organisasi terkualifikasi yang tertarik menggunakan Google Earth (MC, 2008).
Gambaran Umum Penelitian
13
Sumber: https://ec.europa.eu/maritimeaffairs/maritimeday/sites/mare-emd/files/italian-coastguard_en.pdf
Gambar 7. Ilustrasi Maritime Surveillance yang Ideal
Pada penelitian ini digunakan RF dengan frekuensi 433 MHz yang menurut Peraturan Menteri Komunikasi dan Informatika, frekuensi ini tergolong radiolokasi amatir. Tabel 2 Berikut ini merupakan alokasi frekeunsi radio 433 MHz.
Tabel 2. Alokasi frekuensi radio 433 MHz
14
Secara umum penelitian ini merupakan integrasi antara software-hardware untuk melakukan pengembangan sistem pelacakan kapal secara otomatis yang memanfaatkan aplikasi berbasis web. Aplikasi web adalah sebuah program yang disimpan di server dan dikirim melalui internet dan diakses melalui antarmuka browser. Menurut Al-Fedaghi (2011), aplikasi web memerlukan pendekatan komprehensif yang mencakup banyak aspek, termasuk teknis, organisasi, dan hukum/dimensi filosofis. Oleh karena itu, metode pengolahan informasi, teknik, dan alat-alat telah diperbaiki untuk mendukung pengembangan aplikasi semacam ini. Ilustrasi aplikasi web dapat dilihat pada Gambar 8 berikut ini.
Gambar 8. Ilustrasi Aplikasi Web
Dalam model klien/server, sebuah aplikasi dibagi menjadi dua bagian yang terpisah, tapi masih merupakan sebuah kesatuan yakni komponen klien dan komponen server. Komponen klien juga sering disebut sebagai front-end, sementara komponen server disebut sebagai back-end. Komponen klien dari aplikasi tersebut dijalankan dalam sebuah workstation dan menerima masukan data dari pengguna. Komponen klien tersebut akan menyiapkan data yang dimasukkan oleh pengguna dengan menggunakan teknologi pemrosesan tertentu dan mengirimkannya kepada komponen server yang dijalankan di atas mesin server, umumnya dalam bentuk request terhadap beberapa layanan yang dimiliki oleh server. Komponen server akan menerima permintaan dari klien, dan langsung memprosesnya dan mengembalikan hasil pemrosesan tersebut kepada klien. Klien pun menerima informasi hasil pemrosesan data yang dilakukan server dan menampilkannya kepada pengguna, dengan menggunakan aplikasi yang berinteraksi dengan pengguna.
Iqbal (2011) telah merancang sebuah instrumen yang disebut drifter buoy yang menggunakan modul GPS dan GSM yang ditanam dalam sebuah wahana yang mengapung. Instrumen tersebut merekam data lingkungan berupa suhu di suatu titik tertentu kemudian bergerak sesuai arus. Sementara pada penelitian ini mengadaptasi suatu sistem surveilans sederhana yang diletakkan di sebuah kapal yang berarti instrumen ini bergerak menurut pergerakan kapal.
15 menyimpan data-data tersebut kemudian diolah kembali dalam sebuah program antarmuka. Program ini akan menghasilkan sebuah peta yang mudah diinterpretasi oleh pengguna terakhir. Berikut ini merupakan tahapan pelaksanaan penelitian (Gambar 9)
Gambar 9. Flowchart Tahapan Penelitian
Dalam tahap pengujian instrumen dan akuisisi di lokasi penelitian khususnya di wilayah kampus IPB. Ujicoba untuk perolehan data terdiri dari beberapa perlakuan yaitu jarak dan kondisi lapangan yang memiliki obstruksi dan tanpa obstruksi. Untuk ujicoba di wilayah pesisir, pemancar diletakkan dalam sebuah kapal nelayan dan receiver diletakkan pada stasiun penerima dengan antena yang lebih tinggi. Pemancar dinyalakan pada saat kapal melakukan perjalanan dan penerima standby melakukan akuisisi data beserta perangkat PC.
Sistem akuisisi data dapat didefinisikan sebagai suatu sistem yang berfungsi untuk mengambil, mengumpulkan, dan menyimpan data dan memprosesnya untuk menghasilkan data yang dikehendaki. Jenis metode yang digunakan pada umumnya bertujuan untuk menyederhanakan proses. Pada mulanya proses pengolahan data lebih banyak dilakukan secara manual oleh manusia, pada saat itu perubahan besaran fisis dirubah menjadi besaran yang langsung bisa diamati panca indra manusia. Kemampuan teknologi pada bidang elektronika besaran fisis yang diukur sebagai data dirubah ke bentuk sinyal listrik, data kemudian ditampilkan kedalam bentuk DRMS. Sistem akuisisi data berkembang pesat sejalan dengan kemajuan di bidang teknologi digital dan kini akuisisi data merubah dari besaran fisis data source ke bentuk sinyal digital. Pengolahan dan pengontrolan proses memungkinkan penerapan akuisisi data dengan software.
Preliminary
Perumusan
Perakitan instrumen
Ujicoba Piranti dan Pengumpulan data lapangan
Pemrosesan data
16
Perakitan Piranti
Sebagaimana yang telah didefinisikan oleh FCC (2010), intentional radiator adalah sebuah peralatan RF yang secara khusus di-desain untuk membangkitkan dan memancarkan sinyal RF. Dalam istilah hardware, intentional radiator meliputi peralatan RF dan semua pengkabelan juga konektor-konektor pendukung tetapi tidak termasuk antenna. Dalam penelitian ini hardware tersusun dari beberapa komponen yaitu; 1. Perangkat Transceiver RF; 2. GPS; 3. Controller Board; 4. Power Supply
Hardware terbagi dua unit, masing-masing satu unit transmitter dan receiver. Transmitter tersusun atas satu buah GPS dan satu transceiver RF. Sementara receiver tersusun dari satu buah controller board dan satu buah transceiver. Gambar 10 merupakan skema fungsional dari perangkat elektronika. Piranti elektronika ini terbagi menjadi dua unit. Pertama unit pemancar (a) dan unit penerima (b)
Gambar 10. Skema fungsional perangkat elektronika
17
Kualitas Data Keluaran
Pada penelitian ini, kualitas data ditentukan dengan keluaran yang diperoleh. Guna mengetahui baik buruknya data keluaran maka perlu dilakukan beberapa pengujian dan pengolahan data.
Terdapat dua tes dilakukan: (1) uji stasioner (mana platform mobile dipertahankan pada lokasi yang tetap) di area terbuka untuk memeriksa presisi (pengulangan) dari sinyal GPS, dan (2) tes mobile (di mana platform bergerak) untuk memeriksa tingkat kesesuaian dinamis. Zhang et al. (2014) melakukan analisis varians untuk memperjelas efek modus posisi dan area untuk mengukur ketepatan GPS.
Akurasi adalah hasil estimasi tingkat kedekatan suatu nilai dari hasil pengukuran terhadap nilai yang sebenarnya. Dalam hal ini akurasi dua dimensi (2D) diekpresikan dalam jarak (m) atau disebut Distance Root Mean Square (DRMS). Axelrad (1998) menyatakan bahwa pengukuran yang akurat dari suatu GPS misalnya 25 meter (kepercayaan 95%), ini berarti bahwa dapat dipercaya bahwa 95% pengukuran berada di kisaran kesalahan 25 meter dan kemungkinan 5% terjadi kesalahan yang lebih besar dari 25 meter.
DRMS merupakan selisih jarak antara titik koordinat referensi dengan hasil perolehan data, dimana titik koordinat tersebut merupakan hasil perpotongan sumbu x (latitude) dan sumbu y (longitude). DRMS merupakan Radial Error, Means Square Position Error, dengan probabilitas sebesar 63%.
Dalam rangka menghitung DRMS 2D, perlu mengetahui beberapa persamaan berikut ini;
Misalnya dan , maka rataan nilai pada pengukuran ke n adalah
̅ ∑ dan ̅ ∑ (1)
Deviasi pada pengukuran dari rataan adalah
̅ dan ̅ (2)
DRMS adalah akar kuadrat dari rata-rata kuadrat error yang didefinisikan sebagai berikut:
DRMS = √ √ (3) Presisi adalah seberapa dekat suatu variable acak yang berkelompok di sekitar nilai yang dihitung (presisi tinggi mencirikan residu yang kecil). Dalam hal ini, presisi 2D diekspresikan dengan Horizontal Dilution of Presicion (HDOP) yang berasal dari data NMEA yang telah dihitung otomatis oleh GPS module dengan rumus (Langley,1999) berikut ini.
√ √ (4)
18
Akurasi dan presisi koordinat tergantung pada instrumen yang digunakan untuk mengumpulkan data koordinat. Dengan adanya satelit ketiga kita dapat membuat perpotongan antara ketiga sapuan. Hasilnya hanya satu titik yang akan berada di permukaan bumi dan oleh karena itu kita dapat membuang lainnya. Dengan hanya tiga satelit kita memiliki trilateration (mirip dengan triangulasi). Dalam prakteknya banyaknya satelit diperlukan untuk meningkatkan akurasi karena kesalahan terjadi dalam menentukan waktu yang tepat saat masing-masing sinyal diterima. Untuk menentukan bias dari data GPS maka perlu mengumpulkan beberapa sampel data. Berikut ini contoh hasil kumpulan data yang mengekspresikan bias pada sebuah kumpulan data. Ilustrasi dari presisi dan akurasi dapat dilihat dari Gambar 12 berikut ini:
(a) (b) (c) (d)
Keterangan: (a)=presisi tinggi dan tak bias, (b)=presisi rendah, akurasi tinggi dan tak bias, (c)=presisi tinggi, akurasi rendah dan bias, (d)=presisi rendah, akurasi rendah dan bias
Gambar 12. Ilustrasi dari presisi dan akurasi
Jika GPS posisi receiver menampilkan koordinat yang berbeda dari
“koordinat benar” dari posisi antena, ini adalah kesalahan posisi. Berbagai macam langkah telah digunakan untuk mengukur kesalahan ini, yaitu tingkat kesesuaian antara posisi diperkirakan atau diukur (Drosos and Malesios, 2012)
Selain itu dalam menentukan DRMS maka perlu pula diketahui faktor kemungkinan atau probabilitas yang terjadi dari sebuah pengukuran koordinat satelit. Perlu diketahui bahwa ada beberapa variasi dalam terminologi ini. Dalam tulisan ini, "RMS error" mengindikasikan kesalahan RMS secara matematika konvensional. Beberapa produsen menggunakan "error RMS" untuk menunjukkan kesalahan jarak sebesar 63%, yang diyakini bahwa angka ini paling memungkinkan dan sering diterapkan. Kedua definisi "kesalahan RMS" ini dapat dipercayai jika modelnya mengikuti distribusi Rayleigh. "CEP" (Circular Error Probable) menunjukkan median atau 50% kesalahan jarak. Meskipun definisi ini umumnya digunakan oleh masyarakat sipil, namun baru-baru ini beberapa spesifikasi receiver milik militer menggunakan "CEP" guna mengindikasi kesalahan jarak 95%. Kesalahan jarak 95% tidak memiliki istilah lain. Namun terkadang disamakan dengan 2DRMS, yang merupakan dua kali kesalahan jarak yang merupakan perkiraan kesalahan yang bersifat pesimistis. Probabilitas meningkat jika tingkat kesalahan yang terjadi dua kali lebih besar.
19 distribusi kesalahan dapat dijelaskan oleh persamaan yang sangat sederhana, yang dikenal sebagai Distribusi Weibull dengan faktor bentuk β = 2 atau distribusi Rayleigh (Molin, 2013)
Probability (Error ≤ Distance) = (5) Jika nilai DRMS dibandingkan dengan nilai probabilitas maka akan terbentuk sebuah kurva Rayleigh seperti yang ditampilkan pada Gambar 13.
Gambar 13. Grafik Distribusi Rayleigh untuk Distance/RMS vs Probability
Tahapan Uji Lapang
Berdasarkan Trimble (2004), teknik postprocessing membutuhkan data mentah GPS untuk disimpan dalam file digital yang kemudian diolah dengan software. Demikian pula dengan file data GPS genggam. Akurasi dapat berupa submeter ataupun lebih baik dari itu, tapi tergantung pada kapabilitas dari GPS genggam dan tipe dari perangkat lunak yang digunakan. Saat melakukan postprocessing data, data geografis pada receiver genggam dan stasiun penerima atau ground segment mesti direkam pada waktu yang bersamaan, serta mesti dideteksi oleh sekurangnya empat satelit.
20
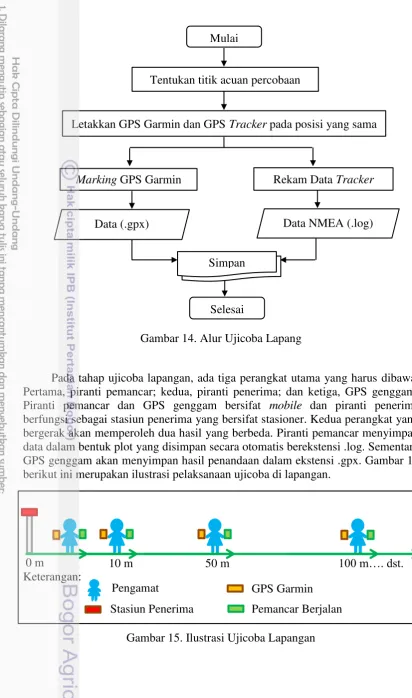
Gambar 14. Alur Ujicoba Lapang
Pada tahap ujicoba lapangan, ada tiga perangkat utama yang harus dibawa. Pertama, piranti pemancar; kedua, piranti penerima; dan ketiga, GPS genggam. Piranti pemancar dan GPS genggam bersifat mobile dan piranti penerima berfungsi sebagai stasiun penerima yang bersifat stasioner. Kedua perangkat yang bergerak akan memperoleh dua hasil yang berbeda. Piranti pemancar menyimpan data dalam bentuk plot yang disimpan secara otomatis berekstensi .log. Sementara GPS genggam akan menyimpan hasil penandaan dalam ekstensi .gpx. Gambar 15 berikut ini merupakan ilustrasi pelaksanaan ujicoba di lapangan.
Keterangan:
Gambar 15. Ilustrasi Ujicoba Lapangan Tentukan titik acuan percobaan
Letakkan GPS Garmin dan GPS Tracker pada posisi yang sama
Marking GPS Garmin Rekam Data Tracker
Simpan
Data NMEA (.log) Data (.gpx)
0 m 10 m 50 m 100 m…. dst.
Pengamat
Stasiun Penerima
GPS Garmin Pemancar Berjalan Mulai
21
Pada Gambar 15 merupakan ilustrasi dari ujicoba di lapangan. Pengamat menentukan stasiun penerima di titik 0 m dan meletakkan perangkat penerima dengan keadaan stabil. Stasiun penerima terdiri dari piranti penerima dan display. Kemudian pengamat berjalan tegak lurus menghindari halangan. Saat mencapai jarak 10 m dari stasiun penerima, pengamat berhenti dan melakukan perekaman data dengan pemancar dan penandaan dengan GPS Garmin. Data direkam selama 10 menit. Setelah data disimpan, pengamat bergerak semakin menjauhi stasiun penerima sejauh 20 m. Perekaman dan penandaan dilakukan setiap pertambahan jarak sejauh 10 m. Proses ini dihentikan ketika display tidak dapat menampilkan data apapun.
Tahap ujicoba di lapangan dilakukan dengan mempertimbangkan teori. Fresnel Zone. Gambar 16 merupakan ilustrasi teori Fresnel Zone dimana berlaku konsep visual Line of Site (visual LOS) – membentuk suaru area dengan garis tegak lurus yang berada dalam zona yang berbentuk ellipsoidal yang penting untuk mendukung proses transmisi RF. LOS pada RF merupakan suatu ukuran yang sangat mempertimbangkan Fresnel Zone. Teori yang tepat dari Fresnel zona cukup kompleks dalam aplikasinya. Namun, konsep ini cukup mudah untuk dipahami. Telah kita ketahui prinsip Huygens, bahwa pada setiap titik dari muka gelombang sirkular yang baru terbentuk, maka beam gelombang mikro akan terus melebar. Kita tahu bahwa suatu frekuensi gelombang dapat saling mengganggu satu sama lain. Teori Fresnel zone diilustrasikan dengan sebuah garis dari titik A ke titik B, kemudian di ruang di sekitar garis yang memberikan kontribusi terhadap apa yang tiba di titik B.
Beberapa gelombang merambat langsung dari A ke B, sementara yang lain melakukan perjalanan di jalur off axis. Akibatnya, jalur mereka menjadi lebih jauh dan menyebabkan pergeseran fasa antara beam langsung dan tidak langsung. Setiap kali pergeseran fasa sebesar satu panjang gelombang, maka terjadi interferensi sinyal yang konstruktif. Melalui pendekatan ini, maka dapat ditemukan adanya zona cincin di sekitar garis A langsung ke B yang berkontribusi terhadap sinyal yang tiba di titik B.
Sumber: https://api.intermap.com/analyst/doc/pages/Sdk.aspx
Gambar 16. Ilustrasi Fresnel Zone r
D
Keterangan:
22
Dengan adanya jarak antara transmitter dan receiver, maka akan banyak zona Fresnel mungkin terbentuk. Jika daerah ini diblokir oleh obstruksi, misalnya pohon atau bangunan, sinyal tiba di ujung yang akan berkurang. Ketika membangun link wireless, maka kita harus yakin bahwa zona ini disimpan bebas dari penghalang. Tentu saja, tidak ada yang sempurna, sehingga biasanya di jaringan nirkabel kita harus memeriksa bahwa daerah yang mengandung sekitar 60 persen dari zona Fresnel pertama harus dijaga bebas. Berikut adalah rumus untuk menghitung zona Fresnel pertama:
Radius (m) = √
(6)
Di mana r adalah jari-jari dari zona dalam meter, D adalah total jarak link dalam meter, dan f adalah frekuensi dalam MHz. Dengan demikian dapat diketahui radius zona. Untuk menghitung ketinggian di atas tanah, kita perlu mengurangi hasil dari garis lurus antara puncak dua menara.
Mengukur Signal Strength
Serangkaian kalibrasi menunjukkan bahwa perhitungan seragam dari propagasi sinyal adalah konstan untukmenentukan jarak berdasarkan kekuatan yang sinyal menunjukkan beberapa kelemahan. Ini memverifikasi bahwa media yang berbeda di sekitar node referensi mempengaruhi atenuasi sinyal dengan cara yang berbeda. Oleh karena itu, jika hanya konstanta propagasi tunggal digunakan untuk semua node referensi, kesalahan perhitungan jarak akan terjadi. Konstanta propagasi yang dikalibrasi mempertimbangkan adanya hambatan, maka akan dikalkulasi secara linear terbalik (Lau, et al.,
Received Signal Strenght Indicator (RSSI) biasanya dinyatakan dalam desibel dari 0 (nol) untuk -120dB, semakin dekat dengan 0 dB maka sinyal yang diterima semakin kuat. Persamaan berikut adalah salah satu cara menghitung RSSI (dBm) berdasarkan perbedaan jarak
23
Gambar 17. Ilustrasi Pengukuran Kuat Sinyal
Penyimpanan Data
Dalam penelitian ini tidak disediakan kartu memori khusus yang ditempatkan dalam instrumen pelacak. Namun hasil rekam jejak langsung ditransmisikan secara wireless melalui sinyal RF. Data hasil rekaman instrumen pelacak dapat disimpan dalam memori komputer ataupun smartphone. Perangkat smartphone yang bisa digunakan untuk menyimpan itu menggunakan sistem operasi Android dan telah terinstal software yang memiliki kemampuan menyimpan data NMEA seperti UART. Fungsi smartphone disini sama dengan laptop, hanya saja disesuaikan penggunaannya untuk stasiun darat yang bermobilitas lebih tinggi karena didukung bentuknya yang lebih ringkas dan praktis. Lalu hasil rekam jejak disimpan untuk tahapan lebih lanjut yaitu post-processing.
Tahapan Pengolahan Data
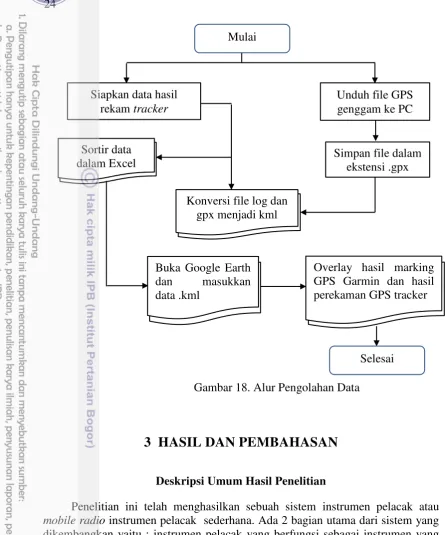
Tahapan pengolahan data mentah terdiri dari dua, pertama visualisasi yaitu dimulai dengan mempersiapkan dua jenis data yaitu data posisi yang simpan dalam GPS handheld dan data yang berasal dari rekam jejak instrumen pelacak (radio instrumen pelacak). Sehingga terdapat dua file NMEA yang berekstensi .gpx dan .log. Kedua file ini dikonversi ke ekstensi .kml agar dapat ditampilkan dalam Google Earth secara online. Tampilan yang dihasilkan berupa tumpang tindih data GPS handheld dan instrumen pelacak (mobile radio instrumen pelacak) seperti yang ditampilkan dalam Gambar 18.
Rx Tx Tx Tx Tx
Lapangan Gymnasium
25 m 50 m 75 m 100 m
24
Gambar 18. Alur Pengolahan Data
3 HASIL DAN PEMBAHASAN
Deskripsi Umum Hasil Penelitian
Penelitian ini telah menghasilkan sebuah sistem instrumen pelacak atau mobile radio instrumen pelacak sederhana. Ada 2 bagian utama dari sistem yang dikembangkan yaitu : instrumen pelacak yang berfungsi sebagai instrumen yang melakukan pengukuran khususnya posisi dan pengiriman data dan receiver berkomunikasi dengan instrumen pelacak sebagai stasiun darat yang menerima data dan menyimpannya dalam file berformat tertentu. Modul RF transceiver yang dapat bekerja dengan jarak transmisi data sampai dengan 1 km pada kondisi dan pengaturan tertentu. Program yang digunakan untuk mengaktifkan transceiver ini adalah YSPRG.exe. Software ini berfungsi untuk melakukan konfigurasi dan pengiriman data melalui PC.
Desain dalam penelitian ini tidak terikat desain VMS yang telah ada di pasaran, karena komponen elektronik yang digunakan telah disesuaikan dengan kebutuhan dan bahan yang tersedia. Dimensi yang dimiliki sepasang alat telemetri ini sekitar (20x5x4) cm3 termasuk panjang antena. Gambar 19 merupakan hasil
Unduh file GPS genggam ke PC
Simpan file dalam ekstensi .gpx Siapkan data hasil
rekam tracker
Konversi file log dan gpx menjadi kml
Overlay hasil marking GPS Garmin dan hasil perekaman GPS tracker Buka Google Earth
dan masukkan data .kml
Mulai
Selesai Sortir data
25 rancang bangun yang terdiri dari satu unit piranti pemancar dan satu unit piranti penerima.
Gambar 19. Hasil Rancang Bangun Instrumen pelacak dan Receiver. a. sebelum diberi casing. b. sesudah diberi casing
Rangkaian Elektronik
Sistem telemetri dapat berupa perangkat sederhana atau sangat kompleks tergantung pada kebutuhan para teknisi dan analis yang menggunakan data (RCC,
a
26
2008). Ketika membahas teknik simulasi RF maka penting untuk menentukan sifat khusus dan karakteristik masing-masing konstruksi dan informasi yang harus diperoleh (Kevenaar et al., 2004).
Instrumen pelacak yang dikembangkan berbasis mikrokontroller ATMega168 produksi perusahaan ATMEL. Beberapa fungsi penting dari mikrokontroler ini yaitu melalui komunikasi serial menerima kalimat NMEA dari GPS, melakukan parsing terhadap NMEA $GPRMC, sehingga didapatkan waktu UTC, posisi lintang dan bujur serta kecepatan dalam knot.
Pada awalnya receiver ini menggunakan USBer PC Link sebagai serial komunikasi antara RF dan laptop/smartphone sebagai penyimpan data. Sehingga perlu adanya tambahan sumber energi sebesar 6 Volt dari aki. Hal ini membuat perangkat ini menjadi tidak ringkas sehingga peneliti mengganti ini dengan Arduino Nano sebagai controller board yang mengendalikan input digital sekaligus mengatur sumber energi yang berasal dari laptop. Adapun konfigurasi elektronika pada receiver yang menghubungkan antara RF dan Arduino yang dibutuhkan sebanyak 4 pin. Dua pin antara pin 1-2, atau 5-16 berfungsi sebagai digital input/output pada port 0-13; pin 27 memiliki 2 fungsi yaitu sebagai +5V output dari on-board regulator atau +5V input dari external power supply, pin 4 atau 29 sebagai supply ground. Konsumsi daya pada transmitter dan receiver seperti tertera dalam Tabel 3.
Tabel 3. Nilai konsumsi daya pada saat kedua perangkat dioperasikan
No Waktu Baterai Tx
Selain itu untuk mengetahui paket data yang dikirim, salah satu cara adalah dengan menggunakan perangkat lunak wireshark. Perolehan data dari software tersebut dapat diperoleh dengan cara membandingkan waktu awal pengamatan sampai akhir waktu pengamatan dari seluruh paket yang dikirimkan. Berikut ini paket data yang dihitung dari awal perekaman sampai akhir (Tabel 4).
Tabel 4. Parameter paket data dalam proses transfer dari Tx dan Rx Percobaan
Stationer
Packet Rate Packet Size Karakter diterima
1 2 11613 78447
2 2 11369 78388
27
Penggunaan Perangkat Lunak
Perangkat lunak penerima dapat diunduh di
http://braypp.googlepages.com/terminal. Terminal USB ini merupakan hasil pengembangan dari pemrograman yang menggunakan bahasa C/C++ dan kompatibel untuk Windows dan Linux. Program ini cenderung mudah untuk dioperasikan. Gambar 20 berikut ini adalah tampilan antarmuka software penyimpan data.
Sumber: Bray, 2014
Gambar 20. Software Data Logger
Hal pertama yang perlu diperhatikan sebelum mengoperasikannya adalah pengaturan perekaman. Pengaturan menyediakan beberapa port sebagai alamat koneksi USB. Terdapat 14 baudrate yang tersedia dan disediakan pula pilihan lainnya. Data bits yang digunakan pada penelitian ini adalah 8 dan stop bit 1. Selain itu costum baudrate yang digunakan adalah 9600 dengan Rx clear dimasukkan angka 27. Setelah USB dari piranti penerima tersambung dengan laptop, maka untuk memulai perekaman perlu menekan tombol start dan pilihan untuk menyimpan file akan muncul. Setelah file kosong telah tersedia, maka jendela terminal ini tampil data hasil perekaman yang berarti file telah terisi dengan data mentah NMEA.
GPS receivers menghitung cepat dan menampilkan posisi dan menggunakan sistem koordinat yang disebut earth-centered earth-fixed (ECEF). Hasilnya dapat dikonversi menjadi sebuah model earth model (geoid) yang didefinisikan berdasarkan datum yang dipilih. Default datum yang dipilih adalah WGS 84 (World Geodetic System 1984) yang menyediakan sistem grid untuk yang diterjemahkan ke sistem koordinat setempat..
28
Gambar 21. Contoh Data Mentah Hasil Rekam Instrumen pelacak
Pesan keluaran NMEA terdiri dari 4 format. Yaitu $GPGSA, $GPRMC, $GPGGA, dan $GPGSV. Kode NMEA tersebut merupakan default dari modul GPS. Masing-masing kode memiliki informasi yang berbeda seperti letak geografis dalam longitude dan latitude, status satelit, jumlah satelit yang beredar, dan karakter yang terkirim. Untuk mengetahui kebenaran pesan yang disampaikan, maka perlu dilakukan pemeriksaan beberapa indikatornya. Pertama dapat ditinjau kondisi aktif atau tidaknya modem GPS. Yaitu dengan cara memeriksa urutan kedua dari data $GPRMC. Jika kode menampilkan V (void), maka modem GPS belum berkomunikasi dengan satelit. Namun jika sudah tertera huruf A (active), maka kondisi modem GPS dalam keadaan aktif berkomunikasi dengan satelit di luar angkasa. Selain itu dapat pula kita periksa urutan selanjutnya. Dimana barisan pesan menampilkan posisi satelit untuk teritorial Pulau Jawa khususnya di area penelitian memiliki kode S untuk latitude dan E untuk longitude. Sintaks untuk menampilkan data NMEA dapat dilihat pada Lampiran 5.
Analisis Data
Karsky (2004) menjelaskan empat metode yang digunakan untuk memperbaiki data sistem penentuan posisi secara global (GPS) dan membandingkan akurasi mereka. Metode yang terbaik adalah metode yang menggunakan suar Differential GPS (DGPS) untuk memperbaiki data GPS secara real time. Selain itu juga diketahui bahwa beberapa GPS genggam menggunakan kode smoothed-phase untuk penentuan posisi. Ini berarti bahwa fase gelombang dapat digunakan untuk keperluan Precise Differential GPS (PDGPS).
29 digunakan software open-source. GPS genggam yang digunakan adalah GPS Garmin60. GPS reference memiliki distorsi yang telah diketahui yakni sekitar 5 m.
Selaras dengan hal tersebut, Dimitrova (2013) menjabarkan, ada sembilan situs yang ditemukan menawarkan visualisasi posisi geografis kapal secara real-time. Situs ini ditinjau menurut dua kriteria yaitu cakupan data dan visualisasi geografisnya. Hanya tiga dari situs yang dianggap tidak menawarkan visualisasi geografis hasil pelacakan. Sebagian besar situs menawarkan visualisasi geografis berdasarkan Google Maps (56% dari 7 website).
Guna mengetahui kinerja alat adalah dengan menghitung besar akurasi dan presisi. Dalam hal ini, peneliti melakukan beberapa eksperimen yang menghasilkan hasil olahan dalam bentuk kualitatif berupa visualisasi dan kuantitif dalam bentuk angka. Visualisasi hasil uji coba dimaksudkan untuk memberi gambaran yang merepresentasikan hasil pengujian. Sehingga pengguna dapat menginterpretasikan data yang diperoleh. Yaitu gambar yang menunjukkan apakah hasil rekam memiliki akurasi dan presisi yang baik atau tidak berdasarkan posisinya terhadap titik acuan.
Penyajian dalam angka yaitu dengan mengkalkulasikan akurasi dan presisi berdasarkan data mentah yang diperoleh dari hasil uji coba di lapang. Terdapat dua uji dilakukan: (1) uji coba stasioner, dimana platform mobile dipertahankan pada lokasi yang tetap di area terbuka untuk memeriksa presisi dari sinyal GPS, dan (2) uji coba mobile (bergerak) dimana platform bergerak untuk memeriksa tingkat kesesuaian dinamis. Prosedur ini telah dilakukan dalam Zhang et al.(2014) dengan membandingkan dua produk GPS komersial di area hutan.
Uji Coba Stasioner
Uji coba ini dilakukan dengan mengkaitkan hubungan antara waktu perekaman dengan DRMS yang terjadi berdasarkan tiga perlakuan yang berbeda. Perlakuan yang diterapkan adalah jenis blokade berupa bangunan, vegetasi, dan tanpa obstruksi atau di ruang terbuka. Uji coba ini dilakukan dengan mempertahankan platform mobile pada lokasi yang tetap di area terbuka untuk memeriksa presisi dari sinyal GPS. Lokasi uji stasioner yang terdiri dari area tertutup dan terbuka. Area tertutup berarti adanya blokade antara modul GPS di bumi dengan satelit , sedangkan pada area terbuka artinya tidak adanya blokade. Guna melihat hubungan obstruksi dengan DRMS yang terbentuk maka perlu dibuat 3 perlakuan. Gambar 22 merupakan tampilan dari kumpulan penandaan dan jejak rekam di Kampus IPB Dramaga. Pengumpulan data ini mewakili uji coba instrumen pelacak di daratan. Pada Gambar 22 ini, titik-titik yang terbentuk menampakkan hasil yang bervariasi. Jika diamati secara visual, terlihat hasil penandaan dan rekam jejak instrumen pelacak tidak memiliki perbedaan yang signifikan dengan GPS handheld. DRMS dihitung berdasarkan selisih antara titik koordinat referensi dengan koordinat hasil rekam GPS instrumen pelacak. Pada penelitian ini data GPS handheld Garmin60 hanya dijadikan sebagai pembanding. Titik acuan dari posisi yang sebenarnya diketahui dari spot-spot yang telah dipilih seperti tampak pada Gambar 22 berikut.
30
terbuka. Pada gambar tersebut tampak titik-titik yang merupakan hasil plotting GPS receiver pada rentang waktu 340 detik. Dimana data direkam setiap 1 detik.
Tabel 5. Data Koordinat Uji Coba Stasiuner
A B C
x1 y1 x1 y1 x1 y1
6o33’27.64” 106 o43’26.04 6o33’40.57 106o43’32.88” 6o33’39.56” 106\o43’34.32” 6 o33’28.16” 106 o43’27.12 6 o 33’ 40.5” 106o43’32.88” 6 o 33 39.77” 106\o43’34.32” 6 o33’28.12” 106 o43’26.76 6o33’40.64” 106o43’32.88” 6 o 33 39.77” 106\o43’34.32” 6 o33’27.98” 106 o43’25.68 6o33’40.49” 106o43’32.88” 6 o 33 39.77” 106\o43’34.32” 6 o33’27.99” 106o43’26.76” 6o33’40.49” 106o43’32.88” 6 o 33 39.77” 106\o43’34.32” 6 o33’ 28.0” 106o43’26.40” 6o33’40.49” 106o43’32.88” 6 o33 39.73” 106\o43’34.32” 6 o33’27.76” 106o43’26.40” 6o33’40.49” 106o43’32.88” 6 o33 39.73” 106\o43’34.32” 6 o33’27.55” 106o43’26.40” 6o33’40.49” 106o43’32.88” 6 o33 39.73” 106\o43’34.32” 6 o33’27.57” 106o43’26.40” 6o33’40.49” 106o43’32.88” 6 o33 39.73” 106\o43’34.32” 6 o33’27.66” 106o43’25.68” 6o33’40.49” 106o43’32.88” 6 o33 39.73” 106\o43’34.32” 6 o33’27.67” 106o43’26.04” 6o33’40.49” 106o43’32.88” 6 o33 39.73” 106\o43’34.32” 6 o33’27.71” 106o43’25.68” 6o33’40.49” 106o43’32.88” 6 o33 39.73” 106\o43’34.32” 6 o33’27.69” 106o43’26.04” 6o33’40.49” 106o 43 32.88 6 o33 39.73” 106\o43’34.32” 6 o33’27.72” 106o43’26.40” 6 o 33’40.62” 106o43’32.88” 6 o33 39.73” 106\o43’34.32” 6 o33’27.63” 106o43’26.40” 6 o 33’40.62” 106o43’32.88” 6 o33 39.66” 106\o43’34.32” 6 o33’27.86” 106 o43’25.68 6 o 33’40.62” 106o43’32.88” 6 o33 39.66” 106\o43’34.32” 6 o33’27.92” 106 o43’25.68 6 o 33’40.62” 106o43’32.88” 6 o33 39.66” 106\o43’34.32” 6 o33’27.67” 106 o43’26.04 6 o 33’40.62” 106o43’32.88” 6 o33 39.66” 106\o43’34.32”
Tabel 5 merupakan data titik koordinat yang merepresentasikan posisi tiap kelompok waktu yang dapat dimisalkan dengan sumbu x2 dan y2. Tiap percobaan memiliki masing-masing titik referensi yang dimisalkan dengan sumbu x1 dan y2. Gambar 22 berikut ini merupakan visualisasi dari hasil perekaman prototipe ini.
Gambar 22. Uji coba stasioner Hasil Plotting dengan Google
Uji coba pertama memperlihatkan plot antara prototipe dan GPS genggam menunjukkan hasil yang saling tumpang tindih. Sementara pada uji coba kedua, hanya terdapat dua titik yang tumpang tindih dengan hasil rekam prototipe ini, namun masih dalam kisaran jarak yang berdekatan. Pada percobaan di lokasi tanpa penghalang, ternyata hasil yang ditunjukkan berbeda. Nilai radial error atau bias yang terjadi relatif kecil. Terlihat dari titik-titik yang hampir mendekati titik
GPS Tracker GPS genggam Titik Acuan