BAB II
DASAR TEORI
2.1 UMUM
Sistem Tenaga Listrik terdiri dari Pusat Pembangkit, Jaringan Transmisi,
Gardu Induk, Jaringan Distribusi, dan Beban seperti yang ditunjukkan Gambar 2.1
di bawah ini.
Gambar 2.1 Single line diagram sistem tenaga listrik secara sederhana
Pada pusat pembangkit terdapat generator dan tranformator penaik
tegangan (step-up transformer). Generator berfungsi untuk mengubah energi
mekanis menjadi energi listrik. Energi Listrik yang dibangkitkan tersebut
dinaikkan level tegangan pada Gardu Induk Transmisi oleh transformator penaik
tegangan untuk mengurangi rugi-rugi daya transmisi. Setelah dinaikkan kemudian
energi listrik dikirimkan melalui saluran transmisi bertegangan tinggi menuju
pusat-pusat beban. Setelah energi listrik disalurkan melalui saluran transmisi
maka sampailah energi listrik di Gardu Induk Distribusi untuk diturunkan level
tegangannya melalui transformator penurun tegangan (step-down transformer)
menjadi tegangan menengah maupun tegangan rendah. Setelah itu energi listrik
2.2 REPRESENTASI SISTEM TENAGA LISTRIK
Komponen Utama dari suatu sistem tenaga pada umumnya terdiri dari
generaror, saluran transmisi, transformator dan beban. Komponen-komponen
utama tersebut digantidengan rangkaian pengganti agar dapat dilakukan analisis
pada sistem tenaga listrik. Rangkaian pengganti yang digunakan adalah rangkaian
pengganti satu phasa dengan nilai phasa netralnya. Dengan asumsi sistem 3 phasa
yang dianalisis dalam keadaan seimbang dan kondisi normal. Untuk
mempresentasikan suatu sistem tenaga listrik digunakan diagram yang disebut
diagram segaris (single line diagram). Diagram segaris berisi informasi yang
dibutuhkan mengenai sistem tenaga tersebut.
Pada studi aliran daya, perhitungan aliran dan tegangan sistem dilakukan
pada terminal tertentu atau bus tertentu. Bus-bus pada studi aliran daya dibagi
dalam 3 macam, yaitu:
• Bus Beban
Pada bus ini daya aktif (P) dan daya reaktif (Q) diketahui sehingga sering
juga disebut bus PQ. Daya aktif dan reaktif yang dicatu ke dalam sistem tenaga
bernilai positif, sementara daya aktif dan reaktif yang di konsumsi bernilai
negatif. Besaran yang dapat dihitung pada bus ini adalah V (tegangan) dan δ
(sudut beban) [2-5].
• Bus Generator
Bus Generator dapat disebut dengan voltage controlled bus karena
tegangan pada bus ini dibuat selalu konstan atau bus dimana terdapat generator.
(prime mover) dan nilai tegangan dikendalikan dengan mengatur eksitasi
generator. Sehingga bus ini sering juga disebut dengan PV bus. Besaran yang
dapat dihitung dari bus ini adalahQ(daya reaktif) danδ(sudut beban) [2-5].
• Slack Bus
Slack Bus sering juga disebut dengan swing bus atau bus berayun. Slack
bus berfungsi untuk menyuplai daya aktif P dan daya reaktif Q. Besaran yang
diketahui dari slack bus adalah teganganVdan sudut bebanδ. Suatu sistem tenaga
biasanya dirancang memiliki bus ini yang dijadikan sebagai referensi yaitu
besaranδ = 00. Besaran yang dapat dihitung dari bus ini adalah daya aktif P dan
daya reaktifQ[2-5].
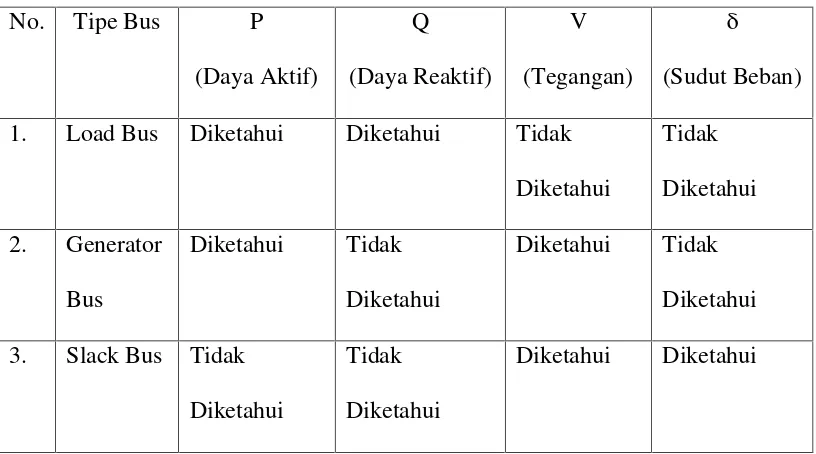
Perbedaan dari masing-masing bus dapat dilihat pada Table 2.1 di bawah
ini.
Tabel 2.1Klasifikasi bus pada sistem tenaga
No. Tipe Bus P
(Daya Aktif) Q (Daya Reaktif) V (Tegangan) δ (Sudut Beban)
1. Load Bus Diketahui Diketahui Tidak
Diketahui Tidak Diketahui 2. Generator Bus Diketahui Tidak Diketahui Diketahui Tidak Diketahui
3. Slack Bus Tidak
Diketahui
Tidak
Diketahui
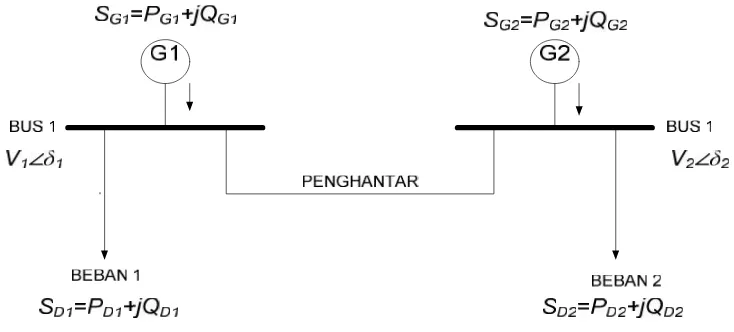
2.3 PERSAMAAN ALIRAN DAYA
Persamaan aliran daya secara sederhana dapat dilihat pada Gambar 2.2
untuk sistem yang memiliki 2 bus. Pada setiap bus terdapat sebuah generator dan
beban. Bus 1 dengan bus 2 dihubungkan dengan penghantar. Pada setiap bus
memiliki 6 besaran elektris yang terdiri dari : PD, PG, QD, QG, V, danδ[3].
Gambar 2.2 Diagram Satu Garis Sistem 2 Bus
Pada Gambar 2.2 dapat dihasilkan persamaan aliran daya. Besar daya pada
bus 1 dan bus 2 adalah
= = + ( )……… (2.1)
= = + ( )……… (2.2)
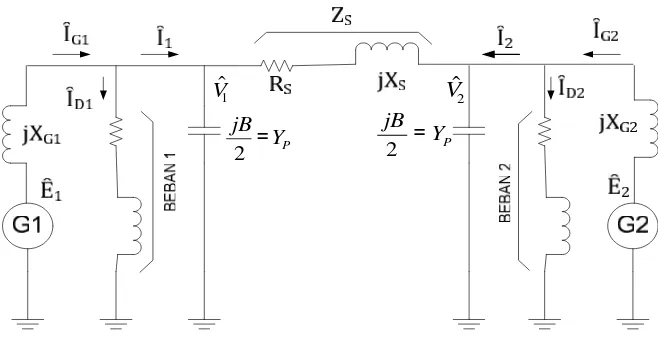
Pada Gambar 2.3 menunjukkan rangkaian ekivalen untuk sistem 2 bus
dimana generator direpresentasikan sebagai sumber yang memiliki reaktansi dan
transmisi model π (phi). Beban diasumsikan memiliki impedansi konstan dan
P
Y jB
=
2 YP
jB
=
2 1
ˆ
V Vˆ2
Gambar 2.3Rangkaian ekivalen sistem 2 Bus
Besarnya arus pada bus 1 dan bus 2 adalah:
= ……….. (2.3)
= ……….………. (2.4)
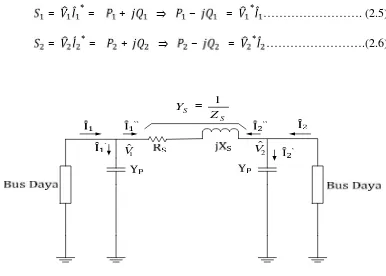
Gambar 2.3 diatas dapat disederhanakan untuk mendapatkan bus daya
pada masing-masing bus seperti pada Gambar 2.4 di bawah ini.
1 ˆ
V Vˆ2
S S
Z
Y = 1
Gambar 2.4Rangkaian ekivalen modelπ untuk sistem 2 bus
= = + = ……….(2.5)
= = + = ……….(2.6)
1 ˆ
V Vˆ2
S S
Z Y = 1
Gambar 2.5Distribusi arus pada rangkaian ekivalen untuk sistem 2 bus
Distribusi arus dapat dilihat pada Gambar 2.5, dimana arus pada bus 1 adalah
= ′ + "………..……….. (2.7)
= + ( ) …………..……… (2.8)
= + + ( ) ……… (2.9)
= + ……….………..……… (2.10)
Dengan:
Y11adalah jumlah admitansi terhubung pada bus 1 = +
Y12adalah admitansi negatif antara bus 1 dengan bus 2=
Untuk aliran arus pada bus 2 adalah:
= + ( ) ………..………..(2.12)
= + + ( ) ……….(2.13)
= + ……….………(2.14)
Dengan:
Y22adalah jumlah admitansi terhubung pada bus 2 = +
Y21adalah admitansi negatif antara bus 2 dengan bus 1= = Y12
Dari Persamaan (2.10) dan (2.14) dapat dihasilkan persamaan dalam
bentuk matrik, yaitu:
= ……….………...(2.15)
Notasi matrik dari Persamaan (2.15) adalah
= ………..……(2.16)
Persamaan (2.5) hingga Persamaan (2.16) yang diberikan untuk sistem 2
bus dapat dijadikan sebagai dasar untuk penyelesaian persamaan aliran daya untuk
sistem n-bus.
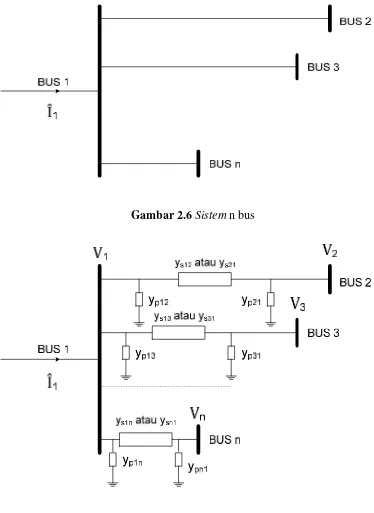
Gambar 2.6 menunjukan sistem dengan jumlah n-bus dimana bus 1
terhubung dengan bus lainnya. Gambar 2.7 menunjukan model transmisi untuk
Gambar 2.6Sistemn bus
Gambar 2.7Model transmisi π untuk sistem n-bus
Persamaan yang dihasilkan dari Gambar 2.7 adalah:
= + + + + + + +
= + + + + + + +
………..………..……… (2.18)
= + + + + ………...……..(2.19)
= ………..……….(2.20)
Dimana:
= + + + + + + + ……… (2.21)
= jumlah semua admitansi yang dihubungkan dengan bus 1
= ; = ; = ………..……. (2.22)
Persamaan (2.20) dapat disubtitusikan ke Persamaan (2.5) menjadi
Persamaan (2.23), yaitu:
= = ……… (2.23)
Dengan:
= = | |
= ; untuk = 1,2, , ………..(2.24)
Persamaan (2.24) merupakan representasi persamaan aliran daya yang
nonlinear. Untuk sistem n-bus, seperti Persamaan (2.15) dapat dihasilkan
Persamaan (2.25), yaitu :
: = : : : : ……….(2.25)
Notasi matrik dari Persamaan (2.25) adalah
= ………. (2.26)
= : : : = ………… (2.27)
2.4 MetodeNewton-Rhapson
Pada sistem multi-bus, penyelesaian aliran daya dilakukan dengan metode
persamaan aliran daya. Metode yang pada umumnya digunkan dalam
penyelesaian aliran daya, yaitu metode Newton-Raphson,Gauss-Seidel, dan Fast
Decoupled. Tetapi metode yang dibahas pada Tugas Akhir ini adalah metode
Newton-Raphson. Dalam metode Newton-Rhapson, persamaan aliran daya
dirumuskan dalam bentuk polar. Persamaan arus yang memasuki bus dapat ditulis
ulang menjadi:
= ……….. (2.28)
Persamaan di atas bila ditulis dalam bentuk polar adalah:
= ∠ + ……… (2.29)
Daya kompleks pada bus I adalah:
− = ∗ ……… (2.30)
Dengan:
∗
= = | |∠−
Subsitusi dari Persamaan (2.29) ke Persamaan (2.30) sehingga menjadi:
− = | |∠− ∑ ∠ + ……… (2.31)
− = ∑ | | ∠ − + ……… (2.32)
Dimana:
Dari Persamaan (2.31) dan (2.32) dapat diketahui persamaan daya aktif
dan persamaan daya reaktif yaitu sebagai berikut:
( )
= ∑ ( ) ( ) cos − ( ) + ( ) ……….. (2.33)
( )
= − ∑ ( ) ( ) sin − ( ) + ( ) ………(2.34)
Persamaan (2.33) dan (2.34) merupakan langkah awal perhitungan aliran
daya menggunakan metode Newton-Raphson. Penyelesaian aliran daya
menggunakan proses iterasi (k+1). Untuk iterasi pertama (1), nilai k = 0,
merupakan nilai perkiraan awal (initial estimate) yang ditetapkan sebelum dimulai
perhitungan aliran daya.
Hasil perhitungan aliran daya menggunakan Persamaan (2.33) dan (2.34)
akan diperoleh nilai ( ) dan ( ). Hasil nilai ini digunakan untuk menghitung
nilai ∆ ( ) dan ∆ ( ). ∆ ( ) dan ∆ ( ) adalah sisa daya (power residual) antara
yang terjadwal dengan nilai hasil perhitungan:
∆ ( ) = , − ,
( )
………. (2.35)
∆ ( ) = , − ( ), ……… (2.36)
Hasil perhitungan∆ ( ) dan∆ ( ) digunakan untuk matrik Jacobian pada
Dari Persamaan (2.37) dapat dilihat bahwa perubahan daya berhubungan
dengan perubahan besar tegangan dan sudut phasa. Secara umum, Persamaan
(2.37) dapat disederhanakan menjadi Persamaan (2.38).
∆ ( ) ∆ ( ) =
∆ ( )
∆| |( ) ……….. (2.38)
Besaran elemen matriks Jacobian Persamaan (2.38) adalah:
• J1
( )
= ∑ ( ) ( ) sin − ( ) + ( ) ………..(2.39)
( )
= − ( ) ( ) sin − ( ) + ( ) ≠ ...(2.40)
• J2
( )
| | = 2 ( )
| | cos + ∑ ( ) cos − ( ) + ( ) .(2.41)
( )
= ( ) cos − ( ) + ( ) ≠ ………...(2.42)
• J3
( )
= ∑ ( ) ( ) cos − ( ) + ( ) ... (2.43)
( )
= − ( ) ( ) cos − ( ) + ( ) ≠ …(2.44)
( )
| | = − 2 ( )
| | sin − ∑ ( ) sin − ( ) +
( )
……….(2.45)
( )
= − ( ) sin − ( ) + ( ) ≠ ... (2.46)
Setelah nilai matrik Jacobian dimasukan ke dalam Persamaan (2.38), maka
nilai ∆ ( ) dan ∆| |( ) dapat dicari dengan menginverskan matrix Jacobian
seperti pada Persamaan (2.47).
∆ ( ) ∆| |( ) =
∆ ( )
∆ ( ) ………. (2.47)
Setelah nilai∆ ( ) dan∆| |( ) diketahui nilainya, maka nilai ( ) dan
| |( ) dapat dicari dengan memasukkan nilai∆ ( ) dan∆| |( ) ke dalam
persamaan:
( )
= ( ) + ∆ ( )……… (2.48)
| |( ) = | |( ) + ∆| |( )……… (2.49)
Nilai ∆ ( ) dan ∆| |( ) hasil perhitungan dari Persamaan (2.48) dan
(2.49) merupakan perhitungan pada iterasi pertama. Nilai ini digunakan kembali
untuk perhitungan iterasi ke-2 dengan cara memasukkan nilai ini ke dalam
Persamaan (2.33) dan (2.34) sebagai langkah awal perhitungan aliran daya.
∆ ( ) konvergen setelah mencapai nilai ketelitian iterasi (ε) yang ditetapkan
{[ ( ) − ( ) ≤ ] dan [| |( ) − | |( ) ≤ ]} [2-5][7].
Prosedur Perhitungan aliran daya dengan menggunakan metode
Newton-Raphson adalah sebagai berikut:
1. Membentuk matriks admitansi Ybussistem.
2. Menentukan nilai awal ( ), ( ), , , , . Pada bus beban (load
bus) di mana , dan , harganya diketahui, besar tegangan
( )dan sudut fasa ( )
disamakan dengan nilai slack bus sehingga
= 1.0. dan ( ) = 0.0. Untuk voltage regulated bus di mana nilai
tegangan dan daya aktif diketahui, nilai sudut fasa disamakan dengan
sudut slack bus, jadi ( ) = 0.
3. Menghitung daya aktif ( ) dan daya reaktif ( ) berdasarkan
Persamaan (2.33) dan (2.34).
4. Menghitung nilai ∆ ( ) dan ∆ ( ) berdasarkan Persamaan (2.35) dan
(2.36).
5. Membuat matrik Jacobian berdasarkan Persamaan (2.38) sampai
Persamaan (2.46)
6. Menghitung nilai sudut beban iterasi pertama ( ) dan nilai
tegangan iterasi pertama| |( ) berdasarkan Persamaan (2.48) dan
(2.49).
7. Jika nilai ( ) − ( ) ≤ dan nilai| |( ) − | |( ) ≤ maka hasil
dilanjutkan untuk iterasi berikutnya. Ulangi prosedur 5 sampai 6
dengan memasukkan nilai ( ) dan | |( ) ke dalam Persamaan
(2.38) sampai (2.46) hingga mencapai nilai yang konvergen [ ( ) −
( )