KONVOLUSI SINYAL DENGAN FUNGSI SINGULARITAS
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
030801050 RONAL SINAGA
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : KONVOLUSI SINYAL DENGAN FUNGSI
SINGULARITAS
Kategori : SKRIPSI
Nama : RONAL SINAGA
Nomor Induk Mahasiswa : 030801050
Program Studi : SARJANA (S1) FISIKA Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN
ALAM (FMIPA) UNIVERSITAS SUMATERA UTARA
Diketahui
Departemen Fisika FMIPA USU Pembimbing Ketua,
PERNYATAAN
KONVOLUSI SINYAL DENGAN FUNGSI SINGULARITAS
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Senin 15 Juni 2009
PENGHARGAAN
Puji syukur kepada Tuhan Yesus Kristus atas segala berkat serta kasih setia-Nya yang senantiasa melindungi, menyertai, memimpin, dan membimbing penulis, sehingga dapat menyelesaikan skripsi ini dengan kesungguhan.
Banyak hal yang telah penulis dapatkan selama berkuliah di program studi Fisika khususnya di bidang peminatan fisika teoritis. Suatu keindahan dan juga kekaguman melihat keajaiban dan keteraturan alam yang direpresentasikan dalam bentuk matematika yang sangat kompleks, terlebih ketika penulis mulai menyusun skripsi ini. Bukan hanya pengetahuan yang penulis peroleh tetapi juga cara berpikir, pengalaman, dan nilai-nilai kehidupan yang telah disharingkan. Kiranya di waktu-waktu kedepan Tuhan mengizinkan penulis untuk tetap berkontribusi di bidang ini.
Banyak orang-orang yang telah berjasa selama penulis mengikuti perkuliahan hingga berkelut dalam penyusunan skripsi ini. Ucapan terima kasih penulis tujukan kepada mereka. Terlebih dahulu kepada Ayahanda M. Sinaga dan Ibunda S. Br Sitinjak, atas semua kasih, doa, kerja keras dan nasehat yang diberikan, maka penulis bisa kuliah sampai menyelesaikan studi di kampus ini. Ucapan terima kasih kepada Drs. Tenang Ginting, M.Si sebagai pembimbing pada penyusunan skripsi ini yang telah memberikan kepercayaan penuh pada penulis untuk penyelesaian skripsi ini. Beberapa panduan ringkas dan cermat telah diberikan kepada penulis untuk secepatnya menyelesaikan skripsi ini. Juga ucapan terima kasih kepada semua dosen Fisika lainnya yang telah memberikan pengetahuan yang sangat berharga bagi penulis selama berkuliah. Ucapan terima kasih juga ditujukan kepada Departemen Fisika FMIPA USU terutama kepada Ketua Departemen Dr. Marhaposan Situmorang, M.Sc, Sekretaris Departemen Dra. Justinon, MS beserta staf dan pegawai yang membantu dalam proses administrasi. Tak terlupa juga ucapan terima kasih kepada staf dan pegawai di lingkungan perpustakaan USU.
Akhirnya tak akan terlupakan ucapan terima kasih kepada yang terkasih, Nancy Br Marpaung yang telah memberikan doa, dukungan, dan perhatiannya selama ini.
Akhirnya penulis berharap skripsi ini memberikan gagasan-gagasan baru bagi pembacanya sehingga memberikan kontribusi bagi penelitian-penelitian fisika selanjutnya. Semoga bidang fisika, khususnya fisika teori dapat lebih berkembang di negeri ini.
ABSTRAK
CONVOLUTION OF SIGNAL WITH SINGULARITY FUNCTION
ABSTRACT
DAFTAR ISI
2.1Sinyal Dasar atau Fungsi Singularitas... 5
2.1.1Sinyal Waktu Kontinu( Continous-Time Signal) ... 5
2.1.1.1 Sinyal/Fungsi Satuan Tangga (Unit Step Function)... 5
2.1.1.2 Sinyal/Fungsi Tanjak Satuan(Unit Ramp Function)... 6
2.1.1.3 Sinyal/Fungsi Impuls Satuan(Unit Delta Diract Function)... 7
2.2Sistem... 9
2.2.1 Sistem Linier Waktu Invariant(Linier Time Invariant)... 9
2.2.2 Sifat-Sifat Linear Time Invariant (LTI)... 10
2.3 Konvolusi... 11
2.4Transformasi Fourier... 12
Sifat-sifat Transformasi Forier... ... 12
2.5 Konvolusi Dengan Fungsi Singularitas ... 15
Bab 3. Hasil Dan Pembahasan ... 16
3.1 Hubungan Konvolusi Dengan Fungsi Singulatitas... 16
3.2 Konvolusi Dengan Fungsi Singularitas... 17
3.2.1 Operasi Konvolusi Pada Fungsi Impuls Satuan ... 17
3.2.2 Operasi Konvolusi Pada Fungsi Tangga Satuan ... 18
3.2.3 Operasi Konvolusi Pada Fungsi Ramp Satuan ... 18
3.3 Operasi Konvolusi Sinyal Sampel Dengan Fungsi Singularitas... 19
DAFTAR GAMBAR
Halaman
Gambar 1 Fungsi Tangga Satuan u(t) ……… 6
Gambar 2 Fungsi Ramp Satuan r(t) ……….. 7
Gambar 3 Fungsi Impuls Satuan (t) ……… 8
Gambar 4 Skema Proses Konvolusi ... 15
Gambar 5 Skema Proses Konvolusi Fungsi Tangga Satuan U(t)... 21
Gambar 6 Skema Proses Konvolusi Fungsi Ramp Satuan R(t)... 23
Gambar 6 Proses Konvolusi Secara Grafik x1(t) dan x2 Untuk Fungsi Satuan Tangga u(t) ... 22
(t) Gambar 7. Skema Proses Konvolusi Fungsi Ramp Satuan R(t) ……… 25
Gambar 8. Proses Konvolusi Secara Grafik pada x1(t) dan x2 Untuk Fungsi Ramp Satuan R(t) ………... 26
DAFTAR TABEL
Halaman
ABSTRAK
CONVOLUTION OF SIGNAL WITH SINGULARITY FUNCTION
ABSTRACT
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Sinyal merupakan sebuah fungsi yang berisi informasi mengenai keadaan tingkah laku dari sebuah sistem secara fisik. Meskipun sinyal dapat diwujudkan dalam beberapa cara, dalam berbagai kasus informasi terdiri dari sebuah pola dari beberapa bentuk yang bervariasi. Secara matematis, sinyal merupakan fungsi dari satu atau lebih variable yang berdiri sendiri (independent variable). Cara untuk menggabungkan dua buah fungsi sinyal dapat dilakukan dengan sebuah metode konvolusi. Konvolusi secara umum dapat diartikan sebagai cara untuk mengkombinasikan dua buah deret angka untuk menghasilkan deret angka ketiga. Konvolusi dilambangkan secara asterisk(*). Bagi para insiniyur konvolusi adalah instrument yang sangat penting. Sebagai contoh, konvolusi digunakan dalam sistem linier dan teori kontrol untuk mendapatkan respon y(t) dari sebuah sistem x(t) jika diberikan impuls h(t). Secara umum konvolusi dua buah sinyal x1(t) dan x2
Sinyal-sinyal dasar yang dipergunakan di sini adalah sinyal-sinyal waktu kontinyu (continuous-time signal) yang terdiri atas : sinyal/fungsi tangga satuan(unit step function) u(t), sinyal/fungsi satuan ramp (unit ramp function) r(t), sinyal/fungsi impuls satuan( unit impuls delta function) δ(t). Secara matematis sinyal/fungsi waktu kontinyu dapat dituliskan sebagai berikut:
Fungsi Tangga Satuan :
Fungsi Ramp Satuan :
Fungsi Impuls Satuan : (t)dt = x(0) t1 < 0 < t2
Hubungan konvolusi sinyal dengan fungsi singularitas secara umum dapat dituliskan sebagai berikut :
x(t)* (t) = x(t)
x(t)*u(t) =
x(t)*r(t) =
1.2 Batasan Masalah
Beberapa batasan masalah yang diperlukan dalam penulisan tugas akhir ini, antara lain:
1. Fungsi-fungsi singularitas yang dipergunakan di sini adalah fungsi waktu kontinyu ( continuous time-signal) dan tiga fungsi saja yang dipergunakan.
2. Proses konvolusi disini menggunaan integral konvolusi yang melibatkan transformasi fourier untuk mengoperasikannya.
1.3 Tujuan Penelitian
Tujuan penelitian ini adalah untuk mendapatkan respon atau output sistem linier time invariant (LTI) dari sinyal masukan yang dikonvolusikan dengan kernel konvolusi atau fungsi singularitas yang tereduksi dalam fungsi singularitas terdefenisi bentuk lain.
1.4 Metode Penelitian
Penelitian ini hanya bersifat teoritis. Dan sebagai acuannya akan digunakan teknik konvolusi pada sinyal dengan menggunakan sifat-sifat fungsi singularitas. Karena penelitian ini bersifat teoritis, maka diperlukan sumber-sumber informasi yang langsung tepat mengenai sasaran topik penelitian. Sumber-sumber informasi ini akan diperoleh dari buku, jurnal dan internet.
Skripsi ini ditulis terbagi menjadi empat bab, dengan penjelasan bab demi bab adalah sebagai berikut,
Pada bab 1 dikemukakan latar belakang penelitian, batasan masalah, tujuan
penelitian, dan metode penelitian yang digunakan.
Bab 2 merupakan tinjauan pustaka yang membahas mengenai sinyal dasar waktu
kontinyu sebagai fungsi singularitas, dan sifat-sifatnya dilanjutkan dengan transformasi fourier. Kemudian hubungan konvolusi dengan fungsi singularitas.
Bab 3 berisi hasil dan pembahasan metode konvolusi sinyal dengan fungsi
singularitas dengan menggunakan transformasi fourier.
Bab 4 berisi kesimpulan mengenai penelitian yang telah dilakukan serta saran
BAB 2
TINJAUAN PUSTAKA
2.1 SINYAL DASAR ATAU FUNGSI SINGULARITAS
Sinyal dasar atau fungsi singularitas adalah sinyal yang dapat digunakan untuk menyusun atau mempresentasikan sinyal-sinyal yang lain. Sinyal-sinyal dasar tersebut memiliki karakteristik yang menjadikan penyelesaian persoalan teknik atau rekayasa menjadi lebih mudah.
2.1.1 Sinyal Waktu Kontinyu( Continuous-Time Signal )
Pada sinyal kontinyu, variable independent (yang berdiri sendiri) terjadi terus-menerus dan kemudian sinyal dinyatakan sebagai sebuah kesatuan nilai dari variable independent. Variabel t digunakan untuk menyatakan variable kontinyu. Suatu sinyal
x(t) dikatakan sebagai sinyal waktu-kontinyu atau sinyal analog ketika memiliki nilai real pada keseluruhan rentang waktu t yang ditempatinya. Sinyal waktu kontinyu dapat didefinisikan dengan persamaan matematis sebagai berikut.
f (t)∈ (− ∞, ∞) (2.1)
2.1.1.1 Sinyal/Fungsi Tangga Satuan( Unit Step Function) U(t)
Fungsi tangga satuan u(t) waktu kontinyu secara matematis didefinisikan sebagai,
(2.2)
Perkalian pada sinyal x(t) dengan u(t) mengeliminasi suatu nilai non-zero(bukan nol) pada x(t) untuk nilai t < 0. Dalam kenyataannya, tidaklah mungkin membangkitkan sinyal yang dapat berubah dari suatu nilai ke nilai yang lain tanpa memakan waktu. Yang dapat dilakukan adalah membuat waktu transisi itu sependek mungkin. Secara grafik fungsi tangga satuan u(t) ditunjukkan seperti Gambar 1 di bawah ini,
1
0 t
) (t u
Gambar 1. Fungsi Tangga Satuan U(t)
Sinyal ini juga merupakan sinyal yang penting untuk mempelajari sinyal secara analitik dan juga banyak dipakai dalam praktek. Perhatikan bahwa fungsi unit step merupakan sinyal waktu kontinyu untuk semua t kecuali pada t=0, dimana fungsinya tidak kontinyu. (S.p.20)
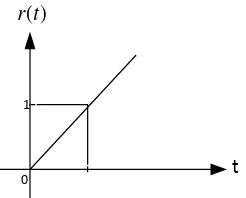
2.1.1.2 Sinyal/Fungsi Ramp Satuan (Unit Ramp Function) R(t)
Fungsi ramp satuan r(t) waktu kontinyu secara matematis didefinisikan sebagai,
(2.3) Fungsi ramp satuan r(t) tidak lain adalah hasil integrasi dari fungsi tangga satuan u(t).
(2.4)
Fungsi unit ramp ditunjukkan pada Gambar 2 di bawah ini.
1
0
t )
(t r
Gambar 2. Fungsi Ramp Satuan R(t)
2.1.1.3 Sinyal/Fungsi Impuls Satuan (Unit Impuls Function)
Sinyal impuls satuan
(2.5) atau disebut juga fungsi delta Diract atau disingkat fungsi delta, menempati posisi yang sangat penting dalam analisis sinyal. Secara matematis fungsi impuls didefinisikan oleh,
dan memiliki sifat :
(i)
(ii)
(2.5.1)
(iii)
(2.5.2)
Dalam praktek, fungsi impuls tersebut didekati menggunakan limit dari suatu fungsi
konvensional untuk parameter ε mendekati nol. Hal ini bersesuaian dengan nilai (t) yang mendekati . (S.p.24)
Secara grafik fungsi impuls satuan (t) gambarnya ditunjukkan seperti Gambar 3 di bawah ini,
0 t
) (t
δ
Gambar 3. Fungsi Impuls Satuan (t)
Sifat – sifat operasi fungsi impuls
(i) Sifat Pergeseran
(2.5.4)
atau secara umum
(2.5.5)
yang menyatakan sebagai penjumlahan kontinyu impuls berbobot.
(ii) Sifat Sampling
Jika kontinyu di t0,
(iii) Sifat scalling
(2.5.7)
Relasi antara (t) dan u(t) dapat ditunjukkan dalam bentuk hubungan diffrensial dan integral dibawah ini,
u(t) = (t)
= u(t) (2.5.8)
2.2 SISTEM
Sinyal adalah fenomena dari lingkungan yang terukur atau terkuantisasi. Sementara sistem adalah bagian dari lingkungan yang menghubungkan sinyal-sinyal atau dengan kata lain merespon sinyal yang masuk dengan menghasilkan sinyal lainnya. Sistem juga dapat didefenisikan sebagai suatu proses yang menghasilkan transformasi sinyal.
Jadi, suatu sistem memiliki sinyal input yang ditransformasikan menjadi sinyal output. Dalam hal ini, sistem waktu kontinyu adalah sistem di mana inputnya merupakan sinyal waktu kontinyu dimana outputnya juga merupakan sinyal waktu kontinyu.
2.2.1 SISTEM LINIER WAKTU INVARIAN(LINIER-TIME INVARIANT)
Dua hal penting pada sistem adalah linieritas dan tidak berubah terhadap waktu.
Disini akan dilihat hubungan input output pad sistem LTI (Linear Time
Invariant) dijelaskan pada operasi konvolusi.
Respon system LTI waktu kontinyu dan integral konvolusi A. Respon Impuls
B. Respon terhadap sembarang input
x(t) = (2.7)
Karena sistemnya linier, maka persamaannya hadir dalam bentuk
y(t) = T{x(t)} = T{ }
= } (2.8)
Jika sistemnya adalah time invariant, maka pergeseran waktu (Time – Shifting) memiliki persamaan,
h(t- )= T{d(t- )} (2.9) Kita subtitusikan dalam persamaan (2.8) bentuk sekarang adalah ,
y(t) = } (2.10)
2.2.2 Sifat-sifat Linier Time Invariant(LTI)
1. Kausalitas
Sistem kausal adalah sistem yang memberi respon setelah ada masukan. Pengaruh suatu masukan dapat dilihat pada saat itu juga dan atau kemudian. Sebuah nilai keluaran dipengaruhi hanya oleh masukan pada saat yang sama atau pada saat yang lalu sehingga,
y(t) = (2.11)
Sinyal impuls satuan mengandung nilai pada t = 0, sehingga respon impuls sistem kausal hanya mengandung nilai di t 0(kontinyu).
2. Stabilitas
Sebuah sistem yang stabil akan memberikan respon yang berhingga jika masukannya berhingga. Jika masukan berhingga maka agar keluaran berhingga haruslah respon impulsnya berhingga. Artinya,
2.3 KONVOLUSI
Konvolusi secara umum dapat diartikan sebagai cara untuk mengkombinasikan dua buah deret angka untuk menghasilkan deret angka ketiga. Dalam hal ini konvolusi digunakan untuk mengoperasikan dua sinyal dan menghasilkan sinyal ketiga. Konvolusi dilambangkan secara asterisk (*). Bagi para insinyiur konvolusi adalah instrument yang sangat penting. Sebagai contoh, konvolusi digunakan dalam sistem linier dan teori kontrol untuk mendapatkan respon y(t) dari sebuah sistem x(t) jika diberikan jika diberikan impuls h(t). Secara umum konvolusi dua buah sinyal x1(t) dan x2(t) dituliskan sebagai berikut :
Jika terjadi pergeseran waktu (Time-Shifting), persamaannya tereduksi menjadi, x1(t+t1) * x2(t) = y(t+t1
dan
) (2.15)
x1(t + t1 + t2 ) * x2 = y( t + t1 + t2 ) (2.16)
Keluaran dari sebuah sistem disebut juga respon. Jika sinyal berupa unit impuls masuk kedalam sistem, maka akan memberikan respon yang disebut respon impuls (impulse response), jika sistemnya kontinyu diberi simbolnya h(t). Jika respon impuls sebuah sistem linier diketahui, maka respon sistem terhadap sembarang bentuk sinyal dapat dihitung. Jika h(t) adalah respon impuls sistem linier kontinyu, dan x(t) adalah sinyal masukan maka sinyal keluarannya adalah
y(t) = x(t)*h(t)
y(t) = h(t) * x(t) Y(w) = H( )X( ) (2.18) Persamaan (2.17) di atas disebut sebagai integral konvolusi, yang juga merupakan yang merupakan input dari sistem LTI (Linier Time Invariant). Dan juga merupakan hasil transformasi fourier dari sinyal impuls dan fungsi singularitas. (I.J.p.78)
Sifat operasional dari konvolusi adalah :
(t) memiliki transformasi fourier sebagai berikut
1(t) X1
Jika x(t) adalah fungsi waktu bersifat real, maka
X(- ) = X*( ) (2.21.4) Persamaan dia atas menyatakan kompleks conjugate.
Time Shifting (Pergeseran Waktu)
x(t) X( (2.21.5) maka transformasi fourier dari x(t-t0
x(x-t
) diperoleh,
0) X( (2.21.6)
Difrensiasi dan integrasi
Untuk Difrensiasi dan Integrasi, jika transformasi fourier x(t) adalah
x(t) X( (2.21.7) maka transformasi forier dari
(2.21.8)
atau
X( ) + X(0) ( ) (2.21.9)
Persamaan diatas merupakan bentuk umum dari hasil kovolusi x(t) dan u(t).
Time and Frequency Shifting( Perkalian waktu dan frekuensi)
Pada Time and Frequency Shifting, jika transformasi x(t) adalah
x(t) X( ) (2.21.10) maka transformasi fourier dari
x(at) , (2.21.11)
a = konstanta real
Sifat Modulasi
Tabel 1. Beberapa Sifat dari Transformasi Fourier
Fungsi, f(t) Transformasi Fourier, F(ω)
Defenisi dari Invers Transformasi Fourier
f(t)=
Defenisi dari Transformasi Fourier
F( (t)
f(t-t0) F(
f(t) F( 0)
f(
F(t) 2
(j nF(
(-jt)n f(t)
1
2 0)
sgn(t)
u(t)
u(t)
u(t)t
2.5 KONVOLUSI DENGAN FUNGSI SINGULARITAS
Hubungan konvolusi dengan fungsi singularitas merupakan integral konvolusi dengan fungsi singularitas itu sendiri, secara matematis dapat bentuk persamaannya sebagai berikut,
x(t) * (t) = x(t) (2.22)
x(t) * u(t) = (2.23)
x(t) * r(t) = (2.24)
Secara umum skema proses konvolusi dengan fungsi singularitas dapat ditunjukkan seperti gambar di bawah ini
Sinyal masukan Proses Konvolusi Hasil konvolusi
x1(t)
x1(t) *x2 (t) y(t)
x2 (t)
Gambar 4. Skema Proses Konvolusi
BAB 3
HASIL DAN PEMBAHASAN
3.1 Hubungan Konvolusi dengan Transformasi Fourier
Setelah landasan teori pada bab 2 telah dibahas maka sekarang akan dibahas hubungan konvolusi dengan transformasi fourier. Seperti yang diketahui dari persamaan (2.18) bahwa konvolusi merupakan hasil dari transformasi fourier di mana, X( merupakan transformasi fourier dari x(t)
x(t) (3.1)
dan H( merupakan hasil transformasi fourier dari h(t)
h(t) H( (3.2)
Atau secara matematis konvolusi dari x(t) dan h(t) persamaannya dituliskan sebagai berikut
x(t)*h(t) X( ) (3.3)
Konvolusi dua buah sembarang sinyal x(t) dan h(t) dapat dituliskan dalam bentuk integral konvolusi. Di mana memiliki batas nilai t dari - sampai , atau secara matematis bentuknya adalah
y(t) = (3.4)
y(t) = (3.5)
atau
h(t)*x(t) = y(t) (3.7) Jika sinyal mengalami pergeseran waktu (Time Shifting), maka persamaanya menjadi x(t+t1)*h(t) = y(t+t1
dan
) (3.8)
x(t+t1+t2)*h(t) = y(t+t1+t2) (3.9)
3.2 Konvolusi pada Fungsi Singularitas
Setelah kita mengetahui hubungan konvolusi dengan transformasi fourier, kini akan dilanjutkan dengan operasi konvolusi pada fungsi singularitas.
3.2.1 Operasi Konvolusi pada Fungsi Impuls Satuan (t)
Seperti yang telah dibicarakan pada bab sebelumnya bahwa fungsi impuls satuan didefenisikan oleh,
(3.10) Yang memiliki arti bahwa untuk semua nilai t1< 0 dan t2 > 0, maka nilai dari setiap hasil integrasi dari (t) dan x(t), akan sama dengan nilai dari sembarang x(t), di mana nilai t = 0.
Fungsi singularitas/ sinyal impuls satuan (t) memiliki beberapa sifat antara lain :
• (0) (3.11) Sifat ini menunjukkan bahwa untuk nilai t = 0, maka fungsi impuls satuan (t) dan akan bernilai menuju tapi itu terhadap sumbu (t), seperti yang di tunjukkan pada gambar SSD-1 (Sinyal-Sinyal Dasar). Jika kita mengkonvolusikan fungsi (t) dengan sembarang sinyal, maka hasil konvolusinya adalah , yang merupakan output dari Linier Time Invariant(LTI).
• (3.13)
Untuk sifat ke tiga ini, di mana hasil integrasi fungsi impuls satuan (t) dengan batas-batas - sampai nilai adalah sama dengan satu atau luas daerahnya adalah satu, tapi dengan panjang takberhingga. Jika sifat ini dikonvolusikan dengan dengan sembarang sinyal x(t), kita akan memperoleh hasil konvolusinya adalah fungsi itu sendiri. Hal ini bersesuaian dengan nilai yang sama dengan satu.
3.2.2 Operasi Konvolusi pada Fungsi Tangga Satuan U(t)
Sekarang kita tinjau kembali pasangan invers dan transformasi fourier pada tabel persamaan sebelumnya,
+ F(0) d( ) (3.14)
Di mana
* u(t) (3.15)
Sehingga dapat kita peroleh hubungan konvolusi sembarang sinyal dengan fungsi tangga satuan u(t),
x(t)* u(t) + F(0) d( ) (3.16)
di mana ketahui juga bahwa,
F( ) = dt (3.17)
3.2.2 Operasi Konvolusi pada Fungsi Ramp Satuan R(t)
Dengan meninjau kembali pasangan invers dan transformasi fourier pada tabel.1
Di mana
Sehingga hubungan konvolusi dengan transformasi fouriernya sekarang menjadi,
u(t) * r(t) + F(0) d( ) (3.22)
3.3 Operasi Konvolusi Sinyal Sampel dengan Fungsi Singularitas
Setelah kita mengetahui bagaimana hubungan konvolusi dengan transformasi fourier, konvolusi dengan transformasi fourier, sekarang akan kita lanjutkan pada pembahasan yang sebenarnya yakni fungsi tangga satuan u(t) fungsi ramp satuan r(t).
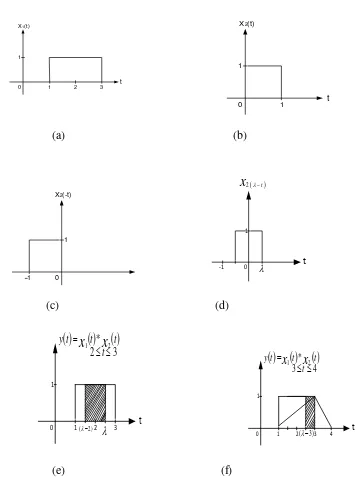
1. Fungsi Tangga Satuan u(t)
Kita ambil dua buah sembarang fungsi sinyal x1 (t) dan x2
x
Dengan menggunakan sifat operasi konvolusi pada persamaan (2.13 ), (t) = u(t) – u(t-1)
x1(t) * x2
maka kita akan memperoleh persamaanya menjadi, (t) = y(t)
{u(t-1) – u(t-3)} * {u(t) – u(t-1)} = y(t) atau
y(t) = {u(t-1) – u(t-3)} *{ u(t) – u(t-1)}
Sekarang kita menggunakan sifat distribusi pada persamaan (2.21) konvolusi untuk sistem linier time invariant (LTI), maka bentuk persamaannya menjadi,
y(t) = { u(t-1) * u(t) –u(t-3) * u(t) – u(t-1) * u(t-1) + u(t-3) * u(t-1)}
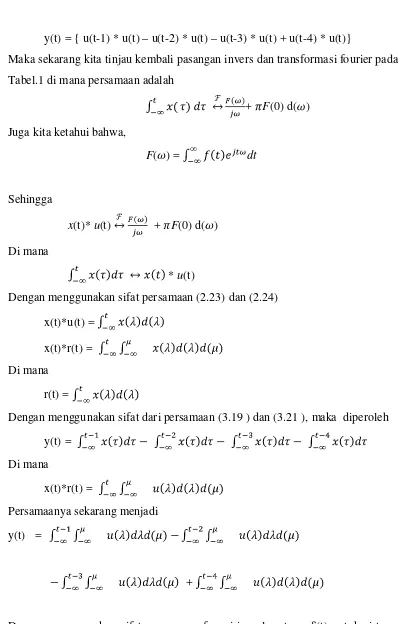
y(t) = { u(t-1) * u(t) – u(t-2) * u(t) – u(t-3) * u(t) + u(t-4) * u(t)}
Maka sekarang kita tinjau kembali pasangan invers dan transformasi fourier pada Tabel.1 di mana persamaan adalah
+ F(0) d( )
Juga kita ketahui bahwa,
F( ) = dt
Sehingga
x(t)* u(t) + F(0) d( )
Di mana
* u(t)
Dengan menggunakan sifat persamaan (2.23) dan (2.24)
x(t)*u(t) =
x(t)*r(t) =
Di mana
r(t) =
Dengan menggunakan sifat dari persamaan (3.19 ) dan (3.21 ), maka diperoleh
y(t) =
Di mana
x(t)*r(t) =
Persamaanya sekarang menjadi
y(t) =
+
Dengan menggunakan sifat pergeseran fungsi impuls satuan (t) untuk sistem linier time invariant (LTI), maka persamaanya terevaluasi dalam bentuk fungsi ramp r(t),
Skema proses konvolusi yang terjadi dapat dilihat seperti Gambar 5 di bawah ini,
Sinyal masukan Proses Konvolusi Hasil Konvolusi
x1(t) = u(t-1) – u(t-3)
x1(t) * x2(t) =
{u(t-1) – u(t-3)} *
{u(t) – u(t-1)}
y(t) = r(t-1) – r(t-2)
– r(t-3) + r(t-4)
x2(t) = u(t) – u(t-1)
Gambar 5. Skema Proses Konvolusi Fungsi Tangga Satuan U(t)
atau dengan menggunakan sifat dari defenisi fungsi ramp r(t) bentuknya menjadi, y(t) = t – 1 , 1
1 memiliki fungsi tangga satuan setelah mengalami operasi konvolusi tereduksi menjadi fungsi singularitas ramp satuan r(t).
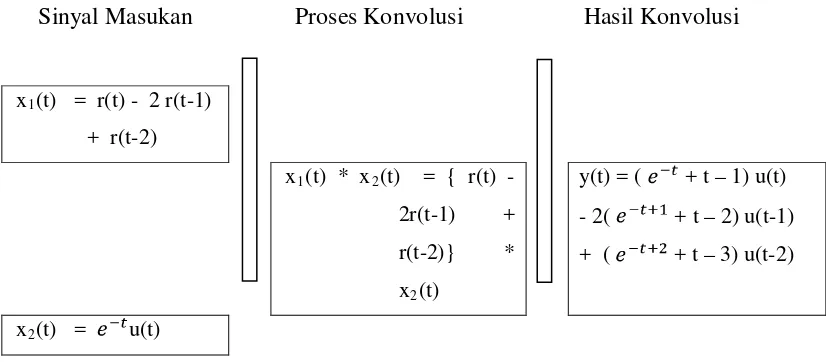
2. Fungsi Ramp Satuan R(t)
x1 x
(t) = r(t) - 2 r(t-1) + r(t-2)
2(t) = u(t)
Dengan meninjau kembali pasangan invers dan transformasi fourier pada tabel 1.
x( + F(0) d( )
Juga kita ketahui bahwa,
F( ) = dt
Sehingga hubungan konvolusi dengan transformasi fouriernya sekarang menjadi,
x(t) * r(t) + F(0) d( )
u(t) * r(t) + F(0) d( )
Kemudian kita gunakan sifat pergeseran waktu (Time Shifting) y(t) = y0(t) – 2y0(t-1) + y0
di mana dengan menggunakan sifat (3.19 ), kita mendapatkan (t-2)
y0(t) = x2(t) * r(t) = x2
sehingga
(
y(t) = x2( - x2
+ x
(
2(
Di mana
x( x2(t) * r(t)
Pasangan transformasinya fouriernya sekarang kita dapatkan,
y(t) = + F(0) d( ) - 2 + F(0) d( ) + + F(0) d( )
Sekarang kita kembali kepersamaan (3.19 ) dengan mengingat kembali bahwa,
di mana dalam hal ini pasangan transformasi fouriernya secara umum terdefenisi
Dengan menggunakan sifat pergeseran waktu untuk sistim linier time invariant (LTI), maka persamaanya terevaluasi kedalam bentuk fungsi tangga satuan u(t),
(t) = ( + t – 1) u(t)
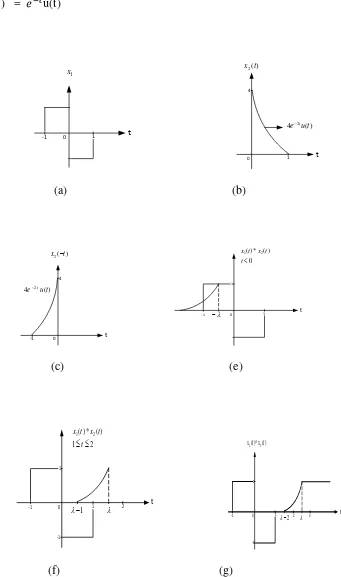
y(t) = ( + t – 1) u(t) - 2 ( + t – 2) u(t-1) + ( + t – 3) u(t-2)
Skema proses konvolusinya dapat kita lihat seperti gambar 7 di bawah ini,
Sinyal Masukan Proses Konvolusi Hasil Konvolusi
Gambar 7. Skema Proses Konvolusi Fungsi Ramp Satuan R(t)
Atau dengan mengikuti sifat dari defenisi fungsi tangga satuan u(t) bentuknya menjadi,
0 t
) ( * )
( 2
1t x t
x
1
1 2 3
(h). Hasil Konvolusi
3.4 Pembahasan
Dengan memahami operasi konvolusi yang telah diselesaikan pada perhitungan di atas dengan menggunakan transformasi fourier dan juga dengan integral konvolusi, dapat diuraikan secara ringkas pada tabel di bawah ini.
Tabel 2. Proses Konvolusi dari Sinyal Sampel dan Hasil Konvolusi
BAB IV
PENUTUP
4.1 Kesimpulan
Konvolusi sinyal dengan fungsi singularitas merupakan sebuah metode yang menggunakan sifat transformasi fourier untuk mendapatkan respon dari sembarang sinyal impuls. Di mana fungsi yang digunakan untuk menganalisis sinyal impuls adalah sinyal dasar yang hadir dalam bentuk fungsi singularitas. Dan jika kita lihat bahwa hasil konvolusi dua buah fungsi sinyal sampel yang juga merupakan output dari Linier Time Invariant (LTI) tereduksi kembali ke dalam bentuk fungsi singularitas dengan defenisi yang berbeda-beda. Hal ini dikarenakan oleh fungsi konvolusi yang berperan sebagai filter yang menyaring sinyal-sinyal atau sering juga disebut sebagai kernel konvolusi.
4.2 Saran
1. A. V. Oppenheim et al.,” Signals and Systems ”. Englewood Cliffs, NJ: Prentice-Hall, 1983, pp. 120-124.
2. C. A. Blackwell, ” The convolution theorem in modern analysis ”,IEEE Trans. Educ., vol. E-9, no. 1, pp. 29-32, Mar. 1996.
3. C. D. McGillem and G. R. Cooper, “ Continuous and Discrete Signal and System Analysis ”, New York: Holt, Rinehart and Winston, 1984, pp. 70-73. 4. E. O. Brigham, ” The Fast Fourier Transform ”, Englewood Cliffs, NJ:
Prentice-Hall, 1974, pp. 50-76.
5. G. F. Ross, “ Choosing the limits on the convolution integral ”, IEEE Trans. Educ., vol. E-10, no. 1, pp. 45-47, Mar. 1967.
6. I.J. Nagrath and S.N. Sharan, “ Signals and Systems ”, MC Graw Hill Offices International Edition, 2001, Publishing Company Limited, Printed in Singapore, pp. 1-13, 7, 110.
7. J. Mayhan. Robert, ” Discrete-Time and Cotinuous Time Linear Systems ”, Addison-Wesley Publishing Company, Title I, 1894, Printed in United State of America, pp. 83, 124-134, 162.
8. K. Naresh. Sinha,” Linear Systems ”, John Wiley and Sons. Inc, Title I, 1991, Printed in United State of America, pp. 73, 117-132.
9. Soliman and Srinath,” Continous and Discrete Signals and Systems ”.
Englewood Cliffs, NJ: Prentice Hall, 1990, Title II, Printed in the United State of America, pp. 167-191.
10.V. Oppenheim. Alan. S. Willsky. Alan, ” Signals And Systems ”, Publishing Library of Congres Cataloging, Title III, Series IV, 1983, Printed in United State of America, pp.78, 129-138, 200.
Transformasi Fourier dari f(x), didefinisikan sebagai berikut:
F(u) = (x) exp[− j2πux]dx
di mana
j =
Sebaliknya, jika diketahui F(u), maka f(x) dapat diperoleh dengan Inverse Transformasi Fourier berikut :
f (x) = (u) exp[− j2πux]du
Syarat Dirichlet
Bila f(x) ditentukan dalam interval (-L, L) : a. Bernilai tunggal
b. Terbatas (Bounded)
c. Merupakan fungsi periodic diluar (-L, L) dengan periode 2L. d. Kontinyu kecuali pada beberapa titik diskontinyu.
e. Mempunyai maksimum dan minimum yang berhingga. Maka dari Fourier konvergen ke :
1. f(x) di x di mana f(x) kontinyu
2. {f(x + 0) + f(x-0)} untuk x di mana f(x) tidak kontinyu.
Fungsi Genap dan Fungsi Ganjil
Fungsi f(x) dikatakan fungsi genap (Symmetric) bila : f(-x) = f(x) Perderetan fungsi genap tidak memuat suku-suku sinus, jadi bn
a
Fungsi f(x) dikatakan gajil (Skew Symmetric) bila : f(-x) = -f(x). Perderetan fungsi ganjil hanya memuat suku-suku sinus, jadi a0 dan an
b
= 0