TUGAS AKHIR
PENGARUH TEGANGAN TIDAK SEIMBANG TERHADAP TORSI START-TORSI MAKSIMUM MOTOR INDUKSI TIGA PHASA
STARTING LANGSUNG
( Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU )
O L E H
Ronald P Sinaga
060402052
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
ABSTRAK
Tegangan tiga phasa yang menyuplai motor induksi dapat ditemukan dalam
keadaan tidak seimbang. Ketidakseimbangan tegangan tiga phasa ini dapat
disebabkan oleh adanya gangguan-gangguan asimetris dalam sistem tenaga, distribusi
beban yang tidak merata, dan lain sebagainya.
Hal di atas dapat mempengaruhi performansi dan juga kerja dari motor induksi
tiga phasa tersebut. Dalam tugas akhir ini, penulis akan melakukan analisa pengaruh
ketidakseimbangan tegangan suplai terhadap torsi start – torsi maksimum motor
KATA PENGANTAR
Puji syukur penulis panjatkan kepada Tuhan Yesus Kristus atas kasih dan
karunia yang dilimpahkan sehingga dapat menyelesaikan Tugas Akhir ini. Adapun
Tugas Akhir ini dibuat untuk memenuhi syarat kesarjanaan di Departemen Teknik
Elektro, Fakultas Teknik Universitas Sumatera Utara.
Tugas akhir ini penulis persembahkan kepada bapak (Parsaoran Sinaga), ibu
(Erika Silalahi), kakak ( Lusianna Sinaga, Ssi ) serta adik - adik tercinta (Mangasi
Sinaga, Sabar Sinaga, Roy Mansa Sinaga) yang merupakan bagian hidup penulis yang
senantiasa mendukung dan mendoakan penulis dari awal studi umumnya, dan
khususnya dalam penulisan tugas akhir ini sehingga tugas akhir ini dapat diselesaikan.
Selama masa perkuliahan sampai masa penyelesaian tugas akhir ini, penulis
banyak memperoleh bimbingan dan dukungan dari berbagai pihak. Untuk itu, dengan
setulus hati penulis menyampaikan ucapan terima kasih yang sebesar-besarnya
kepada :
1. Bapak Ir. Sumantri Zulkarnain selaku dosen Pembimbing Tugas Akhir, atas
segala bimbingan, pengarahan dan motivasi dalam menyelesaikan Tugas
Akhir ini.
2. Bapak Ir.Bangsa Sitepu selaku dosen Penasehat Akademik penulis, atas
bimbingan dan arahannya dalam menyelesaikan perkuliahan.
3. Bapak Ir. Surya Tarmizi Kasim, MSi selaku Ketua Departemen Teknik
Elektro FT-USU dan Bapak Ir. Rahmat Fauzy, MT, selaku Sekretaris
Departemen Teknik Elektro FT-USU.
4. Seluruh Staf Pengajar di Departemen Teknik Elektro USU dan Seluruh
5. Kepala laboratorium konversi energi listrik (Ir. Syamsul Amien, Msi),pegawai
laboratorium konversi energi listrik (abang Isroi Tanjung ST), seluruh asisten
laboratorium konversi energi listrik (Muhammad Iqbal ST dan kawan-kawan).
6. Kelompok kecilku Salvation (Immanuel Sihombing, ST, Folda D Manurung
ST, Bonar Banjarnahor ST, Oktafianus ST) yang mendukungku di dalam doa
dan memberi semangat bagiku.
7. Sahabat – sahabatku, Muhammad Azhary Siregar ST beserta keluarga dan
Albert Ginting.
8. Teman – teman mahasiswa teknik elektro angkatan 2006 yang tidak bisa saya
sebutkan namanya satu persatu.
9. Marnasip Sihite ST yang senantiasa memberikan semangat dan doa bagiku
dalam penyelesaian tugas akhir ini.
10.Dan pihak-pihak yang tidak dapat penulis sebutkan satu persatu.
Akhir kata, tugas akhir ini masih jauh dari sempurna, masih banyak kesalahan
dan kekurangan, namun penulis tetap berharap semoga tugas akhir ini bisa bermanfaat
dan memberikan inspirasi bagi pengembangan selanjutnya.
Medan, 3 Desember2011
Penulis
Ronald P Sinaga
DAFTAR ISI
ABSTRAK... ( i )
KATA PENGANTAR ... ( ii )
DAFTAR ISI... ( iv )
DAFTAR GAMBAR ... ( vii )
DAFTAR TABEL ... ( x )
BAB I PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Tujuan dan manfaat Penulisan ... 1
1.3 Batasan Masalah ... 2
1.4 Metode Penulisan ... 2
1.5 Sistematika Penulisan ... 3
BAB II MOTOR INDUKSI TIGA PHASA 2.1 Umum ... 5
2.2 Konstruksi Motor Induksi ... 5
2.3 Jenis Motor Induksi Tiga Fasa ... 7
2.3.1 Motor Induksi Tiga Fasa Sangkar Tupai...7
2.3.2 Motor Induksi Tiga Fasa Rotor Belitan...9
2.5 Prinsip Kerja Motor induksi ... 14
2.6 Slip ... 19
2.7 Frekuensi Rotor ... 20
2.8 Rangkaian Ekivalen... 21
2.9 Aliran daya dan efisiensi mtor induksi tiga phasa ... 31
2.9.1 ... A liran Daya ... 31
2.9.2 ... E fisiensi ... 34
2.10 ... Desain Motor Induksi Tiga Phasa ... 35
2.11 ... Penentuan parameter Motor induksi ... 37
2.10.1. Percobaan Beban Nol... 37
2.10.2 ... P ercobaan DC ... 40
2.10.3 Percobaan Rotor tertahan ... 43
BAB III SLIP MAKSIMUM DAN TORSI DENGAN TEGANGAN SUPLAI TIDAK SEIMBANG 3.1 Umum ... 46
3.2 Rangkaian Ekivalen Motor induksi tiga phasa dalam keadaan tidak seimbang ... 47
3.3 Slip Maksimum ... 48
BAB IV
4.1 Umum ... 52
4.2 Peralatan Yang Digunakan ... 52
4.3 Percobaan Untuk Mendapatkan Parameter – Parameter Motor Induksi Tiga Fasa... 53
4.3.1. Percobaan Tahanan DC... 53
4.3.1.1 Percobaan Tahanan DC Pada Stator ... 53
4.3.1.2 Percobaan Tahanan DC Pada Rotor ... 55
4.3.2. Percobaan Rotor Tertahan (Block Rotor) ... 56
4.3.3. Percobaan Beban Nol... 59
4.4 Percobaan Pengaruh Tegangan tidak seimbang terhadap torsi start – torsi maksimum motor induksi tiga phasa starting langsung ... 60
BAB V PENUTUP 5.1Kesimpulan ... 84
5.2 Saran ... 85
DAFTAR GAMBAR
Gambar 2.1 Penampang rotor dan stator motor induksi ... 5
Gambar 2.2 Komponen Stator Motor Induksi Tiga Fasa ... 6
Gambar 2.3(a) Tipikal Rotor Sangkar ... 8
Gambar 2.3(b) Bagian-bagian Rotor sangkar ... 8
Gambar 2.4(a) Konstruksi motor induksi rotor sangkar ukuran kecil ... 9
Gambar 2.4(b) Konstruksi motor induksi rotor sangkar ukuran besar ... 9
Gambar 2.5 Cicin Slip ... 10
Gambar 2.6(a) Rotor Belitan ... 10
Gambar 2.6(b) Konstruksi Motor Induksi Tiga Phasa Dengan Rotor Belitan ... 11
Gambar 2.7 Diagram Phasor Fluksi Tiga Phasa dan Arus Tiga Phasa ... 12
Gambar 2.8 Medan putar pada motor induksi tiga phasa ... 12
Gambar 2.9 Arah fluks yang ditimbulkan oleh arus yang mengalir dalam suatu lingkar ... 13
Gambar 2.10 Diagram vektor untuk fluks total pada keadaan t1, t2, t3, t4 ... 14
Gambar 2.11 Proses Induksi Medan Putar Stator pada Kumparan Rotor ... 15
Gambar 2.13 Rangkaian Ekivalen Pada Stator Motor Induksi. ... 22
Gambar 2.14 Rangkaian ekivalen ekivalen rotor ... 24
Gambar 2.15 Rangkaian ekivalen rotor yang sudah dipengaruhi slip ... 24
Gambar 2.16 Rangkaian ekivalen pada rotor motor induksi ... 28
Gambar 2.17 Rangkaian ekivalen motor induksitiga phasa ... 28
Gambar 2.18 Rangkaian Ekivalen Motor Induksi yang disederhanakan dengan primer sebagai referensi... 29
Gambar 2.19 Bentuk lain rangkaian ekivalen motor induksi dilihat dari sisi stator ... 29
Gambar 2.20 Rangkaian ekivalen motor induksi yang disederhanakan dengan sisi primersebagai referensi dengan mengabaikan tahanan rugi-rugi inti ... 30
Gambar 2.21 Diagram aliran daya motor induksi ... 33
Gambar 2.22 karakteristik torsi kecepatan motor induksi ada berbagai desain ... 36
Gambar 2.23 Rangkaian pada saat beban nol ... 38
Gambar 2.24 Rangkaian ekivalen pada saat beban nol ... 38
Gambar 2.25 Rangkaian phasa stator pada saat pengukuran DC hubungan Y... 41
Gambar 2.26 Rangkaian phasa stator pada saat pengukuran DC hubungan delta ... 41
Gambar 2.27 Rangkaian ekivalen pada saat rotor tertahan ... 43
Gambar 3.1 Rangkaian ekivalen motor induksi urutan positif ... 47
Gambar 3.2 Rangkaian ekivalen motor induksi urutan negatif ... 47
Gambar 3.3 Rangkaian ekivalen motor induksi ... 48
Gambar 3.4 Rangkaian thevenin motor induksi ... 48
Gambar 3.5 Rangkaian ekivalen motor induksi ... 49
Gambar 4.1 Rangkaian Percobaan Tahanan DC Pada Stator ... 53
Gambar 4.2 Rangkaian Percobaan Tahanan DC Pada Rotor ... 55
Gambar 4.4 Rangkaian PercobaanBeban Nol ... 59
Gambar 4.5 Rangkaian percobaan pengaruh tegangan tidak seimbang terhadap
torsi start – torsi maksimum motor induksi tiga phasa starting
langsung ... 60
Gambar 4.6 Kurva hasil analisa data pengaruh tegangan tidak seimbang terhadap
torsi start ... 82
Gambar 4.7 Kurva hasil analisa data pengaruh tegangan tidak seimbang terhadap
torsi maksimum ... 83
Gambar 4.8 Kurva hasil data percobaan pengaruh tegangan seimbang terhadap
DAFTAR TABEL
Tabel 2.1 Distribusi Empiris dari Xbr ... 45
Tabel 4.1 Data hasil percobaan tahanan dc pada belitan stator... 54
Tabel 4.2 Data Hasil Percobaan Tahanan DC Pada Belitan Rotor ... 55
Tabel 4.3 Data Hasil Percobaan Rotor tertahan ... 58
Tabel 4.4 Data Hasil Percobaan Beban Nol ... 59
Tabel 4.5 Data Hasil Percobaan perngaruh tegangan tidak seimbang terhadap torsi start – torsi maksimum motor induksi tiga phasa starting langsung ... 61
ABSTRAK
Tegangan tiga phasa yang menyuplai motor induksi dapat ditemukan dalam
keadaan tidak seimbang. Ketidakseimbangan tegangan tiga phasa ini dapat
disebabkan oleh adanya gangguan-gangguan asimetris dalam sistem tenaga, distribusi
beban yang tidak merata, dan lain sebagainya.
Hal di atas dapat mempengaruhi performansi dan juga kerja dari motor induksi
tiga phasa tersebut. Dalam tugas akhir ini, penulis akan melakukan analisa pengaruh
ketidakseimbangan tegangan suplai terhadap torsi start – torsi maksimum motor
BAB I
PENDAHULUAN
1.1LATAR BELAKANG
Motor induksi merupakan motor arus bolak-balik yang paling banyak
diaplikasikan dalam dunia industri. Hal ini dikarenakan motor ini memiliki konstruksi
yang kuat, sederhana serta membutuhkan perawatan yang tidak banyak. Selain itu
motor juga memberikan efisiensi yang baik dan putaran yang konstan untuk tiap
perubahan beban.
Adanya ketidakseimbangan tegangan suplai tiga phasa pada motor induksi
akan mempengaruhi operasi dari motor induksi, yang mana dalam hal ini lebih
ditekankan pada torsi start-torsi maksimum motor induksi tersebut. Hal ini
dikarenakan tegangan merupakan salah satu parameter terpenting dari torsi start dan
torsi maksimum yang dihasilkan motor induksi tiga phasa tersebut.
Oleh karena itu perlu diadakan suatu percobaan dan analisa untuk mengetahui
seberapa besar perbedaan torsi start dan torsi maksimum yang akan dihasilkan oleh
motor induksi tiga phasa yang disuplai dengan tegangan yang seimbang dan tidak
seimbang.
Tujuan
Tujuan penulisan Tugas Akhir ini adalah untuk mengetahui pengaruh
tegangan tidak seimbang terhadap karakteristik torsi start-torsi maksimum motor
induksi, dan pengaruhnya terhadap karakteristik pembebanan efisiensi (Pout) pada
motor induksi starting langsung (Direct On-line Starting).
Manfaat
Adapun manfaat dari tugas akhir ini adalah mendapatkan pengertian dan
pengetahuan pengaruh tegangan tidak seimbang terhadap torsi start dan torsi
maksimum, dan mendapatkan pengetahuan tentang motor induksi secara umum.
1.3BATASAN MASALAH
Untuk memfokuskan masalah yang ingin dibahas, perlu dibuat batasan
masalah. Adapun batasan masalah dalam penulisan Tugas Akhir ini adalah:
1. Tidak membahas standar ketidakseimbangan tegangan.
2. Analisis data berdasarkan peralatan yang tersedia di Laboratorium Konversi
Energi Teknik Elektro USU.
3. Motor induksi yang dipakai adalah motor induksi tiga phasa yang terdapat
pada Laboratorium Konversi Energi Teknik Elektro USU.
4. Tidak menganalisa gangguan dan harmonisa yang terjadi pada sistem tenaga.
5. Tidak membahas pengaturan motor induksi tiga phasa.
1.4 METODE PENULISAN
Metode penulisan yang digunakan dalam menyusun Tugas Akhir ini adalah
sebagai berikut:
Mempelajari dan memahami buku-buku dan jurnal yang ada untuk dijadikan
sebagai acuan dan referensi untuk teori mengenai motor induks tiga phasa.
2. Studi Diskusi
Berupa bimbingan kepada Dosen Pembimbing melalui tanya jawab mengenai
masalah-masalah yang timbul selama penulisan tugas akhir ini
3. Studi Laboratorium
Melakukan percobaan di Laboratorium Konversi Energi Listrik Teknik
Elektro USU untuk mendapatkan data-data yang diperlukan.
1.5 SISTEMATIKA PENULISAN
Penulisan Tugas Akhir ini ditulis dan disusun dalam urutan sebagai berikut:
BAB I PENDAHULUAN
Bagian ini berisikan latar belakang, tujuan dan manfaat penulisan,
batasan masalah, metode penulisan, dan sistematika penulisan.
BAB II MOTOR INDUKSI TIGA PHASA
Bab ini membahas konstruksi motor induksi tiga phasa, jenis motor
induksi tiga phasa, prinsip kerja, medan putar, aliran daya, torsi, slip,
frekuensi rotor, rangkaian ekivalen motor induksi tiga phasa, efisiensi,
desain motor induksi tiga phasa, dan penentuan parameter motor
induksi tiga phasa.
Bab ini membahas mengenai karakteristik performansi motor induksi
rangkaian ekivalen motor induksi dalam keadaan tidak seimbang, torsi
start-torsi maksimum dalam keadaan tegangan tidak seimbang.
BAB IV ANALISA PENGARUH TEGANGAN TIDAK SEIMBANG TERHADAP TORSI START-TORSI MAKSIMUM MOTOR INDUKSI TIGA PHASA
Bab ini berisi percobaan-percobaan yang dilakukan untuk melihat
pengaruh tegangan tidak seimbang terhadap torsi start-torsi maksimum
motor induksi tiga phasa starting langsung ( Direct On-line Starting ).
BAB V PENUTUP
Bagian ini berisikan beberapa kesimpulan dan saran dari penulisan
BAB II
MOTOR INDUKSI TIGA PHASA
2.1 UMUM
Motor induksi merupakan motor arus bolak-balik yang paling banyak dipakai dalam
industri dan rumah tangga. Dikatakan motor induksi karena arus rotor motor ini
merupakan arus yang terinduksi sebagai akibat adanya perbedaan antara putaran rotor
dengan medan putar yang dihasilkan arus stator.
Motor ini memiliki konstruksi yang kuat, sederhana, dan handal. Disamping
itu motor ini juga memiliki efisiensi yang cukup tinggi saat berbeban penuh dan tidak
membutuhkan perawatan yang banyak.
2.2 KONSTRUKSI MOTOR INDUKSI TIGA PHASA
Secara umum motor induksi terdiri dari rotor dan stator. Rotor merupakan
bagian yang bergerak, sedangkan stator bagian yang diam. Diantara stator dan rotor
Rotor
Stator
Gambar 2.1. Penampang rotor dan stator motor induksi
Komponen stator adalah bagian terluar dari motor yang merupakan bagian yang diam
dan mengalirkan arus phasa. Stator terdiri atas tumpukan laminasi inti yang memiliki
alur yang menjadi tempat kumparan dililitkan yang berbentuk silindris. Alur pada
tumpukan laminasi inti diisolasi dengan kertas (Gambar 2.2.(b)). Tiap elemen
laminasi inti dibentuk dari lembaran besi (Gambar 2.2 (a)). Tiap lembaran besi
tersebut memiliki beberapa alur dan beberapa lubang pengikat untuk menyatukan inti.
Tiap kumparan tersebar dalam alur yang disebut belitan phasa dimana untuk motor
tiga phasa, belitan tersebut terpisah secara listrik sebesar 120o. Kawat kumparan yang
digunakan terbuat dari tembaga yang dilapis dengan isolasi tipis. Kemudian tumpukan
inti dan belitan stator diletakkan dalam cangkang silindris (Gambar 2.2.(c)). Berikut
ini contoh lempengan laminasi inti, lempengan inti yang telah disatukan, belitan stator
( a ) ( b ) ( c )
Gambar 2.2. Menggambarkan komponen stator motor induksi tiga phasa (a) Lempengan inti
(b) Tumpukan inti dengan kertas isolasi pada beberapa alurnya
(c) Tumpukan inti dan kumparan dalam cangkang stator
Untuk rotor akan dibahas pada bagian berikutnya, yaitu jenis – jenis motor induksi
tiga fasa berdasarka jenis rotornya.
2.3 JENIS MOTOR INDUKSI TIGA FASA
Ada dua jenis motor induksi tiga fasa berdasarkan rotornya yaitu:
1. motor induksi tiga fasa sangkar tupai ( squirrel-cage motor)
2. motor induksi tiga fasa rotor belitan ( wound-rotor motor )
kedua motor ini bekerja pada prinsip yang sama dan mempunyai konstruksi stator
yang sama tetapi berbeda dalam konstruksi rotor.
2.3.1 MOTOR INDUKSI TIGA FASA SANGKAR TUPAI ( SQUIRREL-CAGE MOTOR)
Penampang motor sangkar tupai memiliki konstruksi yang sederhana. Inti stator pada
motor sangkar tupai tiga fasa terbuat dari lapisan – lapisan pelat baja beralur yang
didukung dalam rangka stator yang terbuat dari besi tuang atau pelat baja yang
dipabrikasi. Lilitan – lilitan kumparan stator diletakkan dalam alur stator yang
terpisah 120 derajat listrik. Lilitan fasa ini dapat tersambung dalam hubungan delta ( Δ ) ataupun bintang ( Υ ).
Batang Poros
Kipas
Laminasi Inti Besi
Aluminium
Cincin Aluminium
Batang Poros
Kipas
( a ) ( b )
Gambar 2.3 Rotor sangkar, (a) Tipikal rotor sangkar, (b) Bagian-bagian rotor sangkar
Batang rotor dan cincin ujung motor sangkar tupai yang lebih kecil adalah coran
tembaga atau aluminium dalam satu lempeng pada inti rotor. Dalam motor yang lebih
besar, batang rotor tidak dicor melainkan dibenamkan ke dalam alur rotor dan
kemudian dilas dengan kuat ke cincin ujung. Batang rotor motor sangkar tupai tidak
selalu ditempatkan paralel terhadap poros motor tetapi kerapkali dimiringkan. Hal ini
akan menghasilkan torsi yang lebih seragam dan juga mengurangi derau dengung
magnetik sewaktu motor sedang berputar.
Pada ujung cincin penutup dilekatkan sirip yang berfungsi sebagai pendingin. Rotor
jenis rotor sangkar standar tidak terisolasi, karena batangan membawa arus yang besar
pada tegangan rendah. Motor induksi dengan rotor sangkar ditunjukkan pada gambar
2.4.
Sumber tegangan
Belitan Stator
Belitan Rotor
Slip Ring
Tahanan Luar
( a ) ( b )
Gambar 2.4 (a) Konstruksi motor induksi rotor sangkar ukuran kecil
(b) Konstruksi motor induksi rotor sangkar ukuran besar
2.3.2 MOTOR INDUKSI TIGA FASA ROTOR BELITAN ( WOUND-ROTOR MOTOR )
Motor rotor belitan ( motor cincin slip ) berbeda dengan motor sangkar tupai dalam
hal konstruksi rotornya. Seperti namanya, rotor dililit dengan lilitan terisolasi serupa dengan lilitan stator. Lilitan fasa rotor dihubungkan secara Υ dan masing – masing
fasa ujung terbuka yang dikeluarkan ke cincin slip yang terpasang pada poros rotor.
Secara skematik dapat dilihat pada gambar 2.5. Dari gambar ini dapat dilihat bahwa
cincin slip dan sikat semata – mata merupakan penghubung tahanan kendali variabel
luar ke dalam rangkaian rotor.
Pada motor ini, cincin slip yang terhubung ke sebuah tahanan variabel eksternal yang
berfunsi membatasi arus pengasutan dan yang bertanggung jawab terhadap
pemanasan rotor. Selama pengasutan, penambahan tahanan eksternal pada rangkaian
rotor belitan menghasilkan torsi pengasutan yang lebih besar dengan arus pengasutan
yang lebih kecil dibanding dengan rotor sangkar. Konstruksi motor tiga fasa rotor
belitan ditunjukkan pada gambar di bawah ini.
(a)
(b)
Gambar 2.6 (a) Rotor belitan
(b) Konstruksi motor induksi tiga phasa dengan rotor belitan
Perputaran motor pada mesin arus bolak – balik ditimbulkan oleh adanya medan putar
( fluks yang berputar ) yang dihasilkan dalam kumparan statornya. Medan putar ini
terjadi apabila kumparan stator dihubungkan dalam fasa banyak, umumnya fasa 3.
Hubungan dapat berupa hubungan bintang atau delta.
Misalkan kumparan a – a; b – b; c – c dihubungkan 3 fasa, dengan beda fasa masing – masing 1200 ( gambar 2.5a ) dan dialiri arus sinusoid. Distribusi arus ia, ib, ic sebagai fungsi waktu adalah seperti gambar 2.5b. Pada keadaan t1, t2, t3, dan t4, fluks resultan yang ditimbulkan oleh kumparan tersebut masing – masing adalah seperti gambar
2.6c, d, e, dan f.
Pada t1 fluks resultan mempunyai arah sama dengan arah fluks yang dihasilkan oleh kumparan a – a; sedangkan pada t2, fluks resultannya mempunyai arah sama dengan arah fluks yang dihasilakan oleh kumparan c – c; dan untuk t3 fluks resultan mempunyai arah sama dengan fluks yang dihasilkan oleh kumparan b – b. Untuk t4, fluks resultannya berlawanan arah dengan fluks resultan yang dihasilkan pada saat t1 keterangan ini akan lebih jelas pada analisa vektor.
Gambar 2.8. Medan putar pada motor induksi tiga phasa
Dari gambar c, d ,e, dan f tersebut terlihat fluks resultan ini akan berputar satu kali. Oleh karena itu untuk mesin dengan jumlah kutub lebih dari dua, kecepatan sinkron
dapat diturunkan sebagai berikut :
ns = (rpm) ……….……..…….. (2.1)
f = frekuensi ( Hz ) P = jumlah kutub
Analisis secara vektor didapatkan atas dasar:
1. Arah fluks yang ditimbulkan oleh arus yang mengalir dalam suatu lingkar
sesuai dengan perputaran sekrup ( gambar 2.9 ).
Gambar 2.9. Arah fluks yang ditimbulkan oleh arus yang mengalir dalam suatu lingkar
2. Kebesaran fluks yang ditimbulkan ini sebanding dengan arus yang
Notasi yang dipakai untuk menyatakan positif atau negatifnya arus yang mengalir
pada kumparan a – a, b – b, dan c – c pada gambar 2.5a yaitu: harga positif, apabila tanda silang (x) terletak pada pangkal konduktor tersebut ( titik a, b, c ), sedangkan negatif apabila tanda titik ( . ) terletak pada pangkal konduktor tersebut (gambar 2.10). Maka diagram vektor untuk fluks total pada keadaan t1, t2, t3, t4, dapat dilihat pada gambar 2.10.
Gambar 2.10. Diagram vektor untuk fluks total pada keadaan t1, t2, t3, t4
Dari semua diagram vektor di atas dapat pula dilihat bahwa fluks resultan berjalan
2.5 PRINSIP KERJA MOTOR INDUKSI TIGA FASA
Pada saat belitan stator diberi tegangan tiga fasa, maka pada stator akan dihasilkan
arus tiga fasa, arus ini kemudian akan menghasilkan medan magnet yang berputar
dengan kecepatan sinkron. Medan putar akan terinduksi melalui celah udara
menghasilkan ggl induksi (ggl lawan) pada belitan fasa stator. Medan putar tersebut
juga akan memotong konduktor-konduktor belitan rotor yang diam. Hal ini terjadi
karena adanya perbedaan relatif antara kecepatan fluksi yang berputar dengan
konduktor rotor yang diam yang disebut juga dengan slip (s). Akibatnya adanya slip
maka ggl (gaya gerak listrik) akan terinduksi pada konduktor-konduktor rotor.
Gambar 2.11. Proses induksi medan putar stator pada kumparan rotor
Karena belitan rotor merupakan rangkaian tertutup, baik melalui cincin ujung (end ring) ataupun tahanan luar, maka arus akan mengalir pada konduktor – konduktor rotor. Karena konduktor – konduktor rotor yang mengalirkan arus ditempatkan di
dalam daerah medan magnet yang dihasilkan stator maka akan terbentuklah gaya
mekanik (gaya lorentz) pada konduktor – konduktor rotor. Hal ini sesuai dengan
hukum gaya lorentz (perhatikan gambar 2.9) yaitu bila suatu konduktor yang dialiri
arus berada dalam suatu kawasan medan magnet, maka konduktor tersebut akan
elektromagnetik tersebut dapat dijelaskan oleh kaidah tangan kanan (right-hand rule). Kaidah tangan kanan menyatakan, jika jari telunjuk menyatakan arah dari vektor arus
i dan jari tengah menyatakan arah dari vektor kerapatan fluks B, maka ibu jari akan menyatakan arah gaya F yang bekerja pada konduktor tersebut. Gaya F yang dihasilkan pada konduktor – konduktor rotor tersebut akan menghasilkan torsi (τ). Bila torsi mula yang dihasilkan pada rotor lebih besar daripada torsi beban (τ0 > τb),
maka rotor akan berputar searah dengan putaran medan putar stator.
Gambar 2.12. Konduktor berarus dalam ruang medan magnet
Untuk mempelajari prinsip kerja motor induksi tiga fasa, maka dapat dijabarkan
dalam beberapa langkah berikut:
1. Apabila belitan stator dihubungkan dengan sumber tegangan tiga fasa yang
setimbang maka akan mengalir arus pada tiap belitan fasa.
2. Arus yang mengalir pada tiap fasa menghasilkan fluks yang berubah-ubah
untuk setiap waktu.
3. Resultan dari ketiga fluksi bolak-balik tersebut menghasilkan medan putar
yang bergerak dengan kecepatan sinkron ns yang besarnya ditentukan oleh
nS = (rpm)………..………...…(2.2)
4. Akibat fluksi yang berputar akan menimbukanl ggl pada stator yang besarnya
adalah:
e1 = -N1 (volt)……..………....(2.3)
E1 = 4,44f N1 Φm (volt)……….……….(2.4)
dimana :
e1 = ggl induksi sesaat stator/fasa (volt)
E1 = ggl induksi efektif stator/fasa (volt)
F = frekuensi saluran (Hz)
N1 = jumlah lilitan kumparan stator/fasa
Φm = fluks magnetik maksimum (weber)
5. Fluksi yang berputar tersebut akan memotong batang konduktor pada rotor.
Akibatnya pada kumparan rotor timbul tegangan induksi sebesar E2 yang
besarnya :
E2 = 4,44f N2 Φm (volt) ...(2.5)
Dimana : E2 = tegangan induksi pada rotor saat rotor dalam keadaan diam
N2 = jumlah lilitan rotor
6. Karena kumparan rotor merupakan rangkaian tertutup, maka akan mengalir
arus (I2).
7. Adanya arus (I2) di dalam medan magnet akan menimbulkan gaya (F) pada
rotor.
8. Gaya (F) akan menghasilkan torsi (τ). Apabila torsi mula yang dihasilkan lebih
besar torsi beban, maka rotor akan berputar dengan kecepatan (nr) yang searah
dengan medan putar stator.
9. Pada saat berputar,maka ada perbedaan kecepatan medan putar stator (ns)
dengan kecepatan rotor (nr) disebut dengan slip (s) dan dinyatakan dengan:
s
=
x 100 %...(2.6)10.Pada rotor dalam keadaan berputar, besarnya tegangan yang terinduksi pada
kumparan rotor akan bervariasi tergantung besarnya slip. Tegangan induksi ini
dinyatakan dengan E2S yang besarnya :
E2S = 4,44
s
f N2 Φm (volt)………(2.7)Dimana :
E2S = tegangan induksi rotor dalam keadaan berputar (volt)
sf = frekuensi rotor ( frekuensi tegangan induksi pada rotor dalam keadaan
berputar )
11.Apabila ns = nr, maka slip akan bernilai nol. Hal ini akan menyebabkan tidak
2.6 SLIP
Motor induksi tidak dapat berputar pada kecepatan sinkron. Seandainya hal ini
terjadi, maka rotor akan tetap diam relatif terhadap fluksi yang berputar. Maka tidak
akan ada ggl yang diinduksikan dalam rotor, tidak ada arus yang mengalir pada rotor,
dan karenanya tidak akan menghasilkan kopel. Kecepatan rotor sekalipun tanpa
beban, harus lebih kecil sedikit dari kecepatan sinkron agar adanya tegangan induksi
pada rotor, dan akan menghasilkan arus di rotor, arus induksi ini akan berinteraksi
dengan fluks listrik sehingga menghasilkan kopel. Selisih antara kecepatan rotor
dengan kecepatan sinkron disebut slip (s). Slip dapat dinyatakan dalam putaran setiap menit, tetapi lebih umum dinyatakan sebagai persen dari kecepatan sinkron.
Slip (s) = − ×100%
s r s
n n n
dimana: nr = kecepatan rotor
persamaan (2.1) di atas memberikan imformasi yaitu:
1. saat s = 1 dimana nr= 0, ini berati rotor masih dalam keadaan diam atau akan berputar.
2. s = 0 menyatakan bahwa ns= nr, ini berarti rotor berputar sampai kecepatan sinkron. Hal ini dapat terjadi jika ada arus dc yang diinjeksikan ke belitan rotor,
3. 0 < s < 1, ini berarti kecepatan rotor diantara keadaan diam dengan kecepatan
sinkron. Kecepatan rotor dalam keadaan inilah dikatakan kecepatan tidak
sinkron. Biasanya slip untuk mendapatkan efisiensi yang tinggi pada saat beban
penuh adalah 0,04.
2.7 FREKUENSI ROTOR
Ketika rotor masih dalam keadaan diam, dimana frekuensi arus pada rotor sama
seperti frekuensi masukan ( sumber ). Tetapi ketika rotor akan berputar, maka
frekuensi rotor akan bergantung kepada kecepatan relatif atau bergantung terhadap
besarnya slip. Untuk besar slip tertentu, maka frekuensi rotor sebesar f'yaitu,
r
s n
n − = , diketahui bahwa
Dengan membagikan dengan salah satu, maka didapatkan
Maka f '=
sf (Hz)..………..(2.8)
Telah diketahui bahwa arus rotor bergantung terhadap frekuensi rotor f'= sf dan ketika arus ini mengalir pada masing – masing phasa di belitan rotor, akan
memberikan reaksi medan magnet. Biasanya medan magnet pada rotor akan
menghasilkan medan magnet yang berputar yang besarnya bergantung atau relatif
terhadap putaran rotor sebesarsns.
Pada keadaan tertentu, arus rotor dan arus stator menghasilkan distribusi medan
magnetik yang berputar secara sinkron. kenyataannya tidak seperti ini karena pada
stator akan ada arus magnetisasi pada kumparannya.
2.8. RANGKAIAN EKIVALEN MOTOR INDUKSI
Telah disebutkan sebelumnya bahwa motor induksi identik dengan sebuah
transformator, tentu saja dengan demikian rangkaian ekivalen motor induksi sama
dengan rangkaian ekivalen transformator. Perbedaan yang ada hanyalah karena pada
kenyataannya bahwa kumparan rotor (kumparan sekunder pada transformator) dari
motor induksi berputar, yang mana berfungsi untuk menghasilkan daya mekanik.
Awal dari rangkaian ekivalen motor induksi dihasilkan dengan cara yang sama
sebagaimana halnya pada transformator. Semua parameter-parameter rangkaian
ekivalen yang akan dijelaskan berikut mempunyai nilai-nilai perfasa.
2. 8. 1. RANGKAIAN STATOR
Fluks pada celah udara yang berputar menghasilkan GGL induksi lawan pada setiap
phasa dari stator. Sehingga tegangan terminal menjadi ggl induksi lawan 1 dan
jatuh tegangan pada impedansi bocor stator. Sehingga persamaan tegangan pada stator
adalah:
1 = 1 + 1
(
R1+X1)
(volt)………...(2.9)
Dimana:
1 = Tegangan nominal stator (Volt)
1 = GGL lawan yang dihasilkan oleh resultan fluks celah udara (Volt)
R1= resistansi stator (Ohm)
X1= reaktansi bocor stator (Ohm)
Sama seperti halnya dengan trafo, maka arus stator ( I1 ) terdiri dari dua buah
komponen. Salah satunya adalah komponen beban (I2,). Salah satu komponen yang
lain adalah arus eksitasi Ie (exciting current). Arus eksitasi dapat dibagi menjadi dua
komponen yaitu, komponen rugi-rugi inti Ic yang sephasa dengan E1 dan komponen
magnetisasi Im yang tertinggal 90º dengan E1. Arus Ic akan menghasilkan rugi-rugi
inti dan arus Im akan menghasilkan resultan flux celah udara. Pada trafo arus eksitasi
disebut juga arus beban nol, akan tetapi dalam motor induksi tiga phasa tidak, hal ini
dikarenakan pada motor induksi arus beban nol menghasilkan fluksi celah udara dan
menghasilkan rugi-rugi tanpa beban ( rugi inti + rugi gesek angin + rugi I2R dalam
jumlah yang kecil) sedangkan pada trafo fungsi arus eksitasi untuk mengahasilkan
fluksi dan menghasilkan rugi inti.
[image:33.595.203.390.503.602.2]Sehingga rangkaian ekivalen dari stator dapat kita lihat pada Gambar 2.13.
Gambar 2.13. Rangkaian ekivalen stator
Pada saat motor start dan rotor belum berputar, maka stator dan rotor memiliki
frekuensi yang sama. Tegangan induksi pada rotor dalam kondisi ini di lambangkan
dengan E2. Pada saat rotor sudah berputar, maka besarnya tegangan induksi pada
rotor sudah dipengaruhi slip. Besarnya tegangan induksi pada rotor pada saat berputar
untuk berbagai slip sesuai dengan persamaan 2.10.
2s = s 2 ……….………..(2.10)
Dimana:
2 = Tegangan induksi pada rotor pada saat diam (Volt)
2s = Tegangan induksi pada rotor sudah berputar (Volt)
Tegangan induksi pada saat motor berputar akan mempengaruhi tahanan dan reaktansi
pada rotor. Tahanan pada rotor adalah konstan, dan tidak dipengaruhi oleh slip.
Reaktansi dari motor induksi bergantung terhadap induktansi dari rotor dan frekuensi
dari tegangan dan arus pada rotor. Dengan induktansi pada rotor adalah L2, maka
reaktansi pada rotor diberikan dengan persamaan:
X 2s = s X2 (Ohm)………(2.11)
Dimana
X2 = Reaktansi rotor dalam keadaan diam ( Ohm )
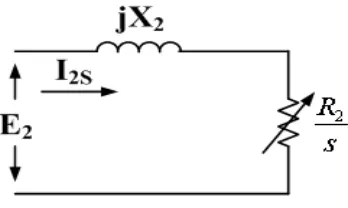
Gambar 2.14. Rangkaian ekivalen rotor
Sehingga arus yang mengalir pada Gambar 2.14 adalah:
2
=
(Ampere)………..……….……….(2.12)Pada saat dibebani (dipengaruhi slip), maka besarnya arus yang mengalir pada rotor
adalah:
2s
=
(Ampere)……….………..(2.13)2s
=
(Ampere)………..(2.14)Maka rangkaian ekivalen rotor yang dipengaruhi slip pada motor induksi dapat kita
lihat pada gambar 2.15:
Gambar 2.15 Rangkaian ekivalen rotor yang sudah dipengaruhi slip
Z2s = + jX2 (Ohm)………..…(2.15)
Pada motor induksi rotor belitan, maka rotor pada motor induksi dapat diganti dengan
rangkaian ekivalen rotor yang memiliki belitan dengan jumlah phasa dan belitan yang
sama dengan stator akan tetapi gaya gerak magnet (mmf) dan fluksi yang dihasilkan
harus sama dengan rotor sebenarnya, maka performansi rotor yang dilihat dari sisi
primer tidak akan mengalami perubahan.
Sehingga hubungan antara tegangan yang diinduksikan pada rotor yang sebenarnya
( rotor) dan tegangan yang diinduksikan pada rangkaian ekivalen rotor ( 2s) adalah:
2s = a rotor……….(2.16)
Dimana:
a : Perbandingan belitan stator dengan belitan rotor sebenarnya.
Sedangkan hubungan antara arus pada rotor sebenarnya ( rotor) dengan arus 2s
Pada rangkaian ekivalen rotor haruslah
2s = ………..………(2.17)
Rotor dari motor induksi adalah terhubung singkat, sehingga impedansi yang
diinduksikan tegangan dapat disederhanakan dengan impedansi rotor hubung singkat.
Sehingga hubungan antara impedansi bocor, slip dan frekuensi dari rangkaian
ekivalen rotor (Z2s) dengan impedansi bocor, slip dan frekuensi rotor sebenarnya
(Zrotor) adalah:
Dengan mengingat kembali impedansi dari rangkaian ekivalen rotor yang sudah
dipengaruhi slip seperti pada persamaan (2.14) maka besarnya impedansi bocor slip
frekuensi dari rangkaian ekivalen rotor adalah:
Z2s = R2 + j sX2………..(2.19)
Dimana:
R2 = Tahanan rotor (Ohm)
s X2 = Reaktansi rotor yang sudah berputar rotor (Ohm)
Z2S = Impedansi bocor slip frekuensi dari rangkaian ekivalen rotor (Ohm)
Pada stator dihasilkan medan putar yang berputar dengan kecepatan sinkron. Medan
putar ini akan menginduksikan ggl induksi pada rangkaian ekivalen rotor ( 2s) dan
menginduksikan ggl lawan pada stator sebesar 2. Bila bukan karena efek kecepatan,
maka tegangan yang diinduksikan pada rangkaian rotor ekivalen ( 2s) akan sama
dengan ggl induksi lawan pada rangkaian stator ( 2) karena rangkaian ekivalen rotor
memiliki jumlah belitan yang sama dengan rangkaian stator. Akan tetapi karena
kecepatan relatif medan putar yang direferensikan pada sisi rotor adalah s kali
kecepatan medan putar yang direferensikan pada sisi stator, maka hubungan antara
dua buah ggl induksi ini adalah:
2s
= s
1……….….(2.20)Karena resultan fluks celah udara ditentukan oleh phasor penjumlahan dari arus stator dan
arus rotor baik itu arus dari rotor sebenarnya maupun arus dari rangkaian ekivalen rotor,
maka dalam hal ini dikarenakan jumlah belitan antara stator dan rangkaian ekivalen rotor
2s = 2………...…(2.21)
Apabila persamaan 2.20 dibagi dengan persamaan 2.21 maka diperoleh :
………...……….(2.22)
Dengan mensubstitusikan persamaan ( 2.22 ) ke persamaan ( 2.19 ) maka diperoleh:
= S S I E 2 2 2 1 I sE
= R2+ jsX2………...………....(2.23)
Dengan membagi persamaan (2.24) dengan s, maka didapat
2 1 I E = s R2
+ jX2………..………....……(2.24)
Dari persamaan (2.17), (2.18), dan (2.22) maka dapat dibuat rangkaian ekivalen rotor
seperti pada Gambar 2.9.
s
E2 E1
2 R 2 sX 2 X s R2 2 R ) 1 1 ( 2 − s R 2
I I2
2 X 2 I 1 E j j j
Gambar2.16. Rangkaian ekivalen pada rotor motor induksi
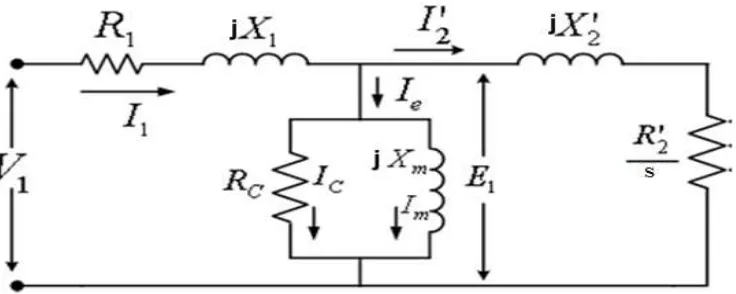
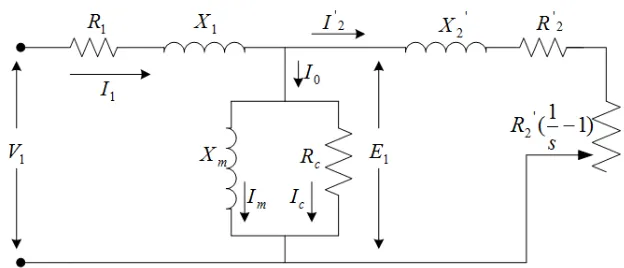
[image:38.595.99.505.461.545.2]Dari penjelasan diatas maka dapat dibuat rangkaian ekivalen per phasa motor induksi.
Gambar 2.17 menunjukkan gambar rangkaian ekivalen per phasa motor induksi:
1
V
1 R 1 X 1 I cR Xm Φ I
c
I
Im2 I 1 E 2 sX 2 I 2 R 2 sE j j j
Gambar2.17. Rangkaian ekivalen motor induksi tiga phasa
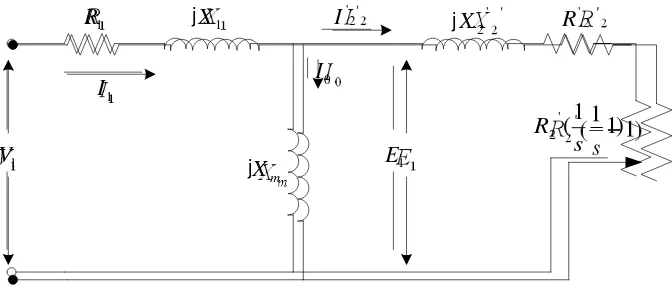
Untuk mempermudah perhitungan, maka rangkaian ekivalen motor induksi dapat
disederhanakan dengan sisi primer sebagai referensi. Sehingga rangkaian ekivalennya
[image:39.595.94.462.421.568.2]seperti pada gambar 2.18:
Gambar 2.18. Rangkaian ekivalen motor induksi yang disederhanakan dengan primer sebagai referensi
Gambar 2.19. Bentuk lain rangkaian ekivalen motor induksi dilihat dari sisi stator
Dimana:
I2’ = 2s(Ampere)
R2’ = a2. R2 (Ohm)
X2’ = a2 . X2 (Ohm)
Pada analisa rangkaian trafo, dapat dilakukan dengan mengabaikan cabang paralel
yang terdiri dari Rc dan Xm, atau memindahkan cabang ke terminal primer. Dalam
rangkaian ekivalen motor induksi penyederhanaan ini tidak dibolehkan.
Hal ini berhubungan dengan kenyataan bahwa arus eksitasi pada trafo bervariasi dari
2 sampai 6 % dari arus beban dan reaktansi bocor primer per unitnya kecil. Tetapi
pada motor induksi, arus eksitasi bervariasi dari 30 sampai 50 % dari arus beban
penuh dan reaktansi bocor primernya relatif lebih besar.
Dalam keadaan kondisi kerja normal dengan tegangan dan frekuensi konstan,
rugi-rugi inti pada motor induksi biasanya tetap. Sehingga tahanan rugi-rugi-rugi-rugi inti (Rc) dapat
diabaikan dari rangkaian ekivalen. Sehingga rangkaian ekivalen motor induksi yang
1
V
1
R X1
m X 2 ' R ' 2 X ) 1 1 ( ' 2 − s R 1 E 1
I I0
2 ' I
j j
[image:41.595.136.472.76.223.2]j
Gambar 2.20 Rangkaian ekivalen motor induksi yang disederhanakan dengan sisi primer sebagai referensi dengan mengabaikan tahanan rugi-rugi inti (Rc)
2.9. ALIRAN DAYA DAN EFISIENSI MOTOR INDUKSI TIGA FASA
2.9.1 ALIRAN DAYA
Pada motor induksi, tidak ada sumber listrik yang langsung terhubung ke rotor,
sehingga daya yang melewati celah udara sama dengan daya yang diinputkan ke rotor.
Daya total yang dimasukkan pada kumparan stator (Pin) dirumuskan dengan
θ
cos
3 1 1
in V I
P = (Watt)………...(2.25)
dimana :
V1 = tegangan sumber (Volt)
I1 = arus masukan (Ampere)
θ = perbedaan sudut phasa antara arus masukan dengan tegangan sumber.
pada poros motor. Berbagai rugi – rugi yang timbul selama proses konversi energi
listrik antara lain :
1. rugi – rugi tetap ( fixed losses ), terdiri dari :
rugi – rugi inti stator ( Pi )
Pi =
C
R E12
. 3
(Watt) ………...………..(2.26)
rugi – rugi gesek dan angin
2. rugi – rugi
variabel, terdiri dari :
rugi – rugi tembaga stator ( Pts )
Pts = 3. I12. R1 (Watt) ………...……….(2.27)
rugi – rugi tembaga rotor ( Ptr )
Ptr = 3. I22. R2 (Watt) ………...………..(2.28)
Daya pada celah udara ( Pcu ) dapat dirumuskan dengan :
Pcu = Pin – Pts – Pi
(Watt) ………(2.29)
Jika dilihat pada rangkaian rotor, satu – satunya elemen pada rangkaian ekivalen yang
mengkonsumsi daya pada celah udara adalah resistor R2 / s. Oleh karena itu daya pada
Pcu = 3. I22.
S
R2
(Watt) ………..(2.30)
Apabila rugi – rugi tembaga dan rugi – rugi inti dikurangi dengan daya input motor,
maka akan diperoleh besarnya daya listrik yang diubah menjadi daya mekanik.
Besarnya daya mekanik yang dibangkitkan motor adalah :
Pmek = Pcu – Ptr (Watt) ………(2.31)
Pmek = 3. I22.
S
R2
- 3. I22. R2
Pmek = 3. I22. R2. ( s
s
−
1
)
Pmek = Ptr x ( s
s
−
1
) (Watt) ………(2.32)
Dari persamaan ( 2.28 ) dan ( 2.30 ) dapat dinyatakan hubungan rugi – rugi tembaga
dengan daya pada celah udara :
Ptr = s. Pcu (Watt) ………...………..…..…(2.33)
Karena daya mekanik yang dibangkitkan pada motor merupakan selisih dari daya
pada celah udara dikurangi dengan rugi – rugi tembaga rotor, maka daya mekanik
dapat juga ditulis dengan :
Pmek = Pcu x ( 1 – s ) (Watt) ………..…..(2.34)
Daya output akan diperoleh apabila daya yang dikonversikan dalam bentuk daya
mekanik dikurangi dengan rugi – rugi gesek dan angin, sehingga daya keluarannya :
Secara umum, perbandingan komponen daya pada motor induksi dapat dijabarkan
dalam bentuk slip yaitu :
[image:44.595.180.445.243.341.2]Pcu : Ptr : Pmek = 1 : s : 1 – s.
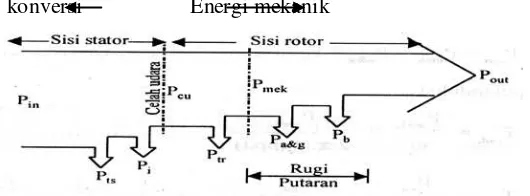
Gambar 2.21 menunjukkan aliran daya pada motor induksi tiga
phasa :
Energi listrik konversi Energi mekanik
Gambar 2.21. Diagram aliran daya motor induksi
2.9.2. EFISIENSI
Efisiensi motor induksi adalah ukuran keefektifan motor induksi untuk mengubah
energi listrik menjadi energi mekanik yang dinyatakan sebagai perbandingan antara
masukan dan keluaran atau dalam bentuk energi listrik berupa perbandingan watt
keluaran dan watt masukan. Defenisi NEMA terhadap efisiensi energi adalah bahwa
efisiensi merupakan perbandingan atau rasio dari daya keluaran yang berguna
terhadap daya masukan total dan biasanya dinyatakan dalam persen juga sering
dinyatakan dengan perbandingan antara keluaran dengan keluaran ditambah rugi -
rugi, yang dirumuskan dalam persamaan berikut.
= =
=
x 100%...(2.36)Dari persamaan terlihat bahwa efisiensi motor bergantung pada besar rugi-ruginya.
rugi-rugi yang dibahas pada sub bab sebelumnya. Pada motor induksi pengukuran efisiensi
motor induksi ini sering dilakukan dengan beberapa cara seperti: - Mengukur
langsung daya listrik masukan dan daya mekanik keluaran
- Mengukur langsung seluruh rugi-rugi dan daya masukan
- Mengukur setiap komponen rugi-rugi dan daya masukan,
dimana pengukuran daya masukan tetap dibutuhkan pada ketiga cara di atas.
Umumnya, daya listrik dapat diukur dengan sangat tepat, keberadaan daya mekanik
yang lebih sulit untuk diukur. Saat ini sudah dimungkinkan untuk mengukur torsi dan
kecepatan dengan cukup akurat yang bertujuan untuk mengetahui harga efisiensi yang
tepat. Pengukuran pada keseluruhan rugi-rugi ada yang berdasarkan teknik
kalorimetri. Walaupun pengukuran dengan metode ini relatif sulit dilakukan,
keakuratan yang dihasilkan dapat dibandingkan dengan hasil yang didapat dengan
pengukuran langsung pada daya keluarannya.
Kebanyakan pabrikan lebih memilih melakukan pengukuran komponen rugi-rugi
secara individual, karena dalam teorinya metode ini tidak memerlukan pembebanan
pada motor, dan ini adalah suatu keuntungan bagi pabrikan. Keuntungan lainnya yang
sering dibicarakan adalah bahwa memang benar error pada komponen rugi-rugi secara individual tidak begitu mempengaruhi keseluruhan efisiensi. Keuntungannya
terutama adalah fakta bahwa ada kemungkinan koreksi untuk temperatur lingkungan
yang berbeda. Biasanya data efisiensi yang disediakan oleh pembuat diukur atau
dihitung berdasarkan standar tertentu.
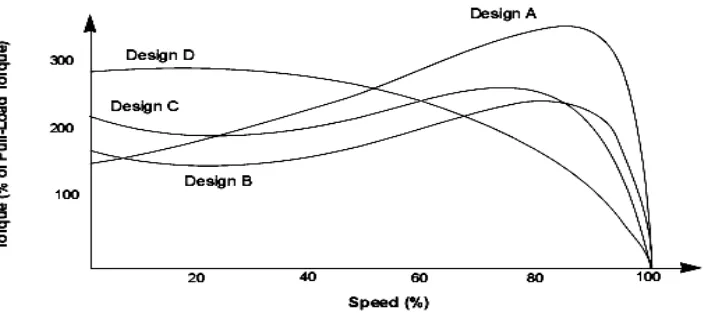
Standard NEMA pada dasarnya mengkategorikan motor induksi ke dalam empat kelas
yakni disain A,B,C, dan D. Karakteristik torsi – kecepatannya dapat dilihat pada
[image:46.595.102.455.202.361.2]gambar 2.22.
Gambar 2.22. Karakteristik torsi kecepatan motor induksi pada berbagai disain • Kelas A : disain ini memiliki torsi start normal (150 – 170%) dari nilai
ratingnya) dan arus start relatif tinggi. Torsi break down nya merupakan yang paling tinggi dari semua disain NEMA. Motor ini mampu menangani beban
lebih dalam jumlah besar selama waktu yang singkat. Slip < = 5%
• Kelas B : merupakan disain yang paling sering dijumpai di pasaran. Motor ini
memiliki torsi start yang normal seperti halnya disain kelas A, akan tetapi
motor ini memberikan arus start yang rendah. Torsi locked rotor cukup baik
untuk menstart berbagai beban yang dijumpai dalam aplikasi industri. Slip
motor ini < =5 %. Effisiensi dan faktor dayanya pada saat berbeban penuh
tinggi sehingga disain ini merupakan yang paling populer. Aplikasinya dapat
konveyor, mesin penghancur (crusher ), komperessor,dll. Operasi dari motor
ini mendekati kecepatan penuh tanpa overload dalam jumlah besar. Arus
startnya rendah, slipnya < = 5 %
• Kelas D : memiliki torsi start yang paling tinggi. Arus start dan kecepatan
beban penuhnya rendah. Memiliki nilai slip yang tinggi ( 5-13 % ), sehingga
motor ini cocok untuk aplikasi dengan perubahan beban dan perubahan
kecepatan secara mendadak pada motor. Contoh aplikasinya : elevator, crane,
dan ekstraktor.
2.11 PENENTUAN PARAMETER MOTOR INDUKSI
Data yang diperlukan untuk menghitung performansi dari suatu motor induksi dapat
diperoleh dari hasil pengujian tanpa beban, pengujian rotor tertahan, dan pengukuran
tahanan dc belitan stator.
2.11.1 PERCOBAAN BEBAN NOL
Motor induksi dalam keadaan beban nol dibuat dalam keadaan berputar tanpa
memikul beban pada rating tegangan dan frekuensinya. Besar tegangan yang
digunakan ke belitan stator perphasanya adalah V1( tegangan nominal), arus masukan sebesarI0 dan dayanya P0. Nilai ini semua didapat dengan melihat alat ukur pada saat percobaan beban nol.
Dalam percobaan beban nol, kecepatan motor induksi mendekati kecepatan
sinkronnya. Dimana besar slip 0, sehingga ~ sehingga besar impedansi total
bernilai tak berhingga yang menyebabkan arus I'2 pada gambar 2.23 bernilai nol
sehingga rangkaian ekivalen motor induksi pada pengukuran beban nol ditunjukkan
pengukuran ini nr0 yang diperoleh tidak sama dengan ns maka slip tidak sama dengan
nol sehingga ada arus I2’ yang sangat kecil mengalir pada rangkaian rotor, arus I'2
tidak diabaikan tetapi digunakan untuk menghitung rugi – rugi gesek + angin dan rugi
– rugi inti pada percobaan beban nol. Pada pengukuran ini didapat data-data antara
[image:48.595.145.457.289.423.2]lain : arus input (I1=I0), tegangan input (V1 = V0), daya input perphasa (P0) dan kecepatan poros motor (nr0). Frekuensi yang digunakan untuk eksitasi adalah frekuensi sumber f.
Gambar 2.23 Rangkaian pada saat beban nol
Iφ
Zm
V1
I1 = Iφ
Im Ic
Rc jX1 R1
Xm
s R'2 2
'
X
j
j
[image:48.595.135.464.517.637.2]Dengan tidak adanya beban mekanis yang terhubung ke rotor dan tegangan normal
diberikan ke terminal, dari gambar 2.21 didapat besar sudut phasa antara arus antara
0
I dan V0 adalah :
= − 0 0 0 1 0 I V P Cos θ ...(2.37)
Dimana: P0 = Pnl = daya saat beban nol perphasa
V0 = V1 = tegangan masukan saat beban nol
I0 = Inl arus beban nol
dengan P0 adalah daya input perphasa. Sehingga besar E1 dapat dinyatakan dengan
E1 = V1 ∠0⁰ – ( Iφ ∠θ0) ( R1 + jX1 ) (volt)………...………(2.38)
ro
n adalah kecepatan rotor pada saat beban nol. Daya yang didissipasikan oleh Rc dinyatakan dengan :
2 1
0 0
c P I R
P = − (Watt)...(2.39)
1
R didapat pada saat percobaan dengan tegangan DC.
Harga Rc dapat ditentukan dengan
0 2 1 c P E
R = (Ohm)...(2.40)
nl Z = 3 1 nl I V
≅ j(X1+Xm) (Ohm)…...(2.41)
Sehingga didapat 1 1 3 X I V X nl
m = − (ohm)...(2.42)
2.11.2 PERCOBAAN DC
Untuk memperoleh harga R1 dilakukan dengan pengukuran DC yaitu dengan menghubungkan sumber tegangan DC (VDC) pada dua terminal input dan arus
DC-nya (IDC) lalu diukur. Di sini tidak mengalir arus rotor karena tidak ada tegangan yang
terinduksi.
1. KUMPARAN HUBUNGAN WYE (Y)
Gambar rangkaian ketika kumparan motor induksi tiga phasa terhubung Y, dan diberi
suplai DC dapat dilihat pada Gambar 2.25 di bawah ini.
[image:50.595.181.409.497.646.2]a b c RDC RDC RDC VDC + -IDC
Gambar 2.25 Rangkaian phasa stator saat pengukuran dc hubungan Y
(Ohm)...(2.43)
[image:51.595.164.419.218.387.2]2. KUMPARAN HUBUNGAN DELTA (∆)
Gambar rangkaian ketika kumparan motor induksi tiga phasa terhubung delta dan
diberi suplai DC, dapat dilihat pada gambar2.26 di bawah ini.
VDC +
-I
DCR
AR
BR
CGambar 2.26 Rangkaian phasa stator saat pengukuran dc hubungan delta
Diketahui bahwa tahanan pada kumparan pada masing – masing phasa adalah sama,
maka
R R R
RA = B = C = . Jadi gambar diatas dapat disederhanakan menjadi gambar
berikut.
A
R
R
PD C
V
D C
I
A
I
[image:51.595.167.432.599.703.2]Jadi RA= A DC I V Dimana P A P DC A R R R I I + × =
IA IDC
3 2
= , maka
RADC=
DC DC
I V
3
2 =
DC DC I V × 2 3
Harga R1 ini dinaikkan dengan faktor pengali 1,1 sampai dengan 1,5 untuk operasi
arus bolak-balik, karena pada operasi arus bolak-balik resistansi konduktor meningkat
karena distribusi arus yang tidak merata akibat efek kulit dan medan magnet yang
melintasi alur.
DC
ac k R
R1 = × 1 ( Ohm )...(2.44)
Dimana k =faktor pengali, besarnya 1,1 s/d 1,5
Karena besar tahanan konduktor stator dipengaruhi oleh suhu, dan biasanya bila
rugi-rugi motor ditentukan dengan pengukuran langsung pada motor, maka untuk
mengetahui nilai tahanan yang paling mendekati, biasanya dilakukan dengan beberapa
kali pengukuran dan mengambil besar rata-rata dari semua pengukuran yang
dilakukan.
2.11.3 PERCOBAAN ROTOR TERTAHAN
Pada pengukuran ini rotor dipaksa tidak berputar (nr = 0, sehingga s = 1) dan kumparan stator dihubungkan dengan tegangan seimbang. Karena slip s = 1, maka
pada Gambar 3.2, harga '2 '
2 R
s R
melewati | Rc | | jXm | dapat diabaikan. Sehingga rangkaian ekivalen motor induksi
dalam keadaan rotor tertahan atau hubung singkat seperti ditunjukkan pada gambar
2.27
jX1+jX’2
R1 + R’2
V1
I1
Gambar 2.27 Rangkaian ekivalen pada saat rotor tertahan (s = 1)
Impedansi perphasa pada saat rotor tertahan (ZBR) dapat dirumuskan sebagai berikut:
BR BR ' 2 1 ' 2 1
BR R R j(X X ) R jX
Z = + + + = + (Ohm)...(2.45)
Pengukuran ini dilakukan pada arus mendekati arus rating motor. Data hasil
pengukuran ini meliputi : arus input (I1 =IBR), tegangan input (V1 = VBR) dan daya
input perphasa ( PBR = Pin ). Karena adanya distribusi arus yang tidak merata pada batang rotor akibat efek kulit, harga R2’ menjadi tergantung frekuensi. Maka
umumnya dalam praktek, pengukuran rotor tertahan dilakukan dengan mengurangi
frekuensi eksitasi menjadi fBR untuk mendapatkan harga R2’ yang sesuai dengan
frekuensi rotor pada saat slip rating. Dari data-data tersebut, harga RBR dan XBR dapat
dihitung : 2 1 BR BR I P
R = (Ohm)...(2.46)
' 2
1 R
R
BR BR BR
I V
Z = (Ohm)...(2.48)
2 BR 2
BR
BR Z R
X = − (Ohm)…...(2.49)
Untuk menentukan harga X1 dan X2 digunakan metode empiris berdasarkan IEEE
[image:54.595.120.476.312.572.2]standar 112. hubungan X1 dan X2 terhadap Xbr dapat dilihat pada Tabel 3.1
Tabel 2.1 Distribusi Empiris dari Xbr
Disain Kelas
Motor
X1 X2'
A 0,5 Xbr 0,5 Xbr
B 0,4 Xbr 0,6 Xbr
C 0,3 Xbr 0,7 Xbr
D 0,5 Xbr 0,5 Xbr
Rotor Belitan 0,5 Xbr 0,5 Xbr
di sini besar XBR harus disesuaikan dahulu dengan frekuensi rating f.
BR BR ' X f f X BR = (Ohm)...(2.50) 2 ' 1 ' X X
BAB III
SLIP MAKSIMUM DAN TORSI DENGAN TEGANGAN SUPLAI
TIDAK SEIMBANG
3.1 UMUM
Dalam sistem tiga phasa yang seimbang, tegangan line-netral memiliki
magnitud yang sama dan tiap-tiap sudut phasanya berbeda 120 derajat satu sama lain.
Apabila terdapat tegangan tiga phasa yang magnitudnya tidak sama dan sudut
phasanya mengalami pergeseran sehingga tidak berbeda 120 derajat satu sama lain,
maka dikatakan sistem tersebut memiliki tegangan yang tidak seimbang.
Ketika beban tiga phasa setimbang dihubungkan dengan sistem suplai yang
tidak setimbang maka arus yang dialirkan ke beban juga menjadi tidak setimbang.
Oleh karena itu sangat sulit atau tidak mungkin untuk menyediakan suatu sistem
suplai setimbang yang sempurna kepada konsumen, sehingga perlu dilakukan
berbagai upaya untuk meminimalisasi ketidakseimbangan tegangan untuk mereduksi
3.2 RANGKAIAN EKIVALEN MOTOR INDUKSI TIGA PHASA DALAM KEADAAN TIDAK SEIMBANG
Rangkaian ekivalen motor induksi dalam keadaan tegangan tidak seimbang
a. Urutan positif
Vaf
R1 X
1 X
2 R2 / s
Xm I1f
[image:56.595.141.427.224.374.2]I2f
Gambar 3.1 Rangkaian ekivalen motor induksi urutan positif
b. Urutan negatif
Vab
R1 X1
X2 R2 / 2- s
Xm I1b
I2b
[image:56.595.155.435.459.595.2]3.3 SLIP MAKSIMUM
Dengan menggunakan teori thevenin dapat diperoleh besarnya nilai slip pada
[image:57.595.188.414.183.304.2]keadaan maksimum Smaks. Perhatikan gambar 3.3 dibawah ini.
Gambar 3.3 Rangkaian ekivalen motor induksi
Untuk mempermudah perhitungan maka pada Gambar 3.1, terminal a-b
dibuka. Perhatikan gambar berikut.
Gambar 3.4 Rangkaian thevenin motor induksi
Dari gambar 3.4 dapat dihitung tegangan thevenin ( VTh )
Th
V =V1
+
+ ( 1 )
1 m
m
X X j R
jX
(Volt)………...……...(3.1)
Z = R + jX = jXm(R1 jX1)
+ +
+
[image:57.595.195.385.437.564.2]Rangkaian ekivalen pada gambar 3.4 berubah menjadi seperti pada gambar 3.5
[image:58.595.102.495.136.255.2]berikut.
Gambar 3.5 Rangkaian ekivalen motor induksi
Keadaan maksimum terjadi ketika daya celah udara bernilai maksimum.
Karena daya celah udara sebanding dengan daya yang terpakai pada tahanan R2’/s.
Dengan berperinsip pada penyesuian impedansi dalam teori rangkaian, daya tersebut
akan merupakan yang terbesar bila impedansi
s R'2
sama dengan besar impedansi
diantaranya dan tegangan VTh, atau pada harga sτmaxslip yang mempunyai hubungan
(
' 2)
2 e 2 e max 2 ' )
(X X
R s R + + = τ ...(3.3)
Dari sini didapat besar slip pada saat torsi maksimum sτmax adalah
(
' 2)
2 e 2 e 2 ' max )
(X X
R R s + + =
τ ...(3.4)
Kinerja motor induksi dengan keadaan tegangan yang tidak seimbang dapat
dianalisa dengan menggunakan komponen simetris. Tegangan tiga phasa masukan Va,
Vb, Vc, dapat diuraikan menjadi dua komponen yaitu komponen maju ( forward ) dan komponen mundur ( backward ).
( + a + ) ( + + a )
Perhatikan juga bahwa slip untuk komponen maju (forward) Sf = S, sedangkan untuk komponen mundur (backward), Sb adalah
Sb
=
= 2 - SfMaka dari gambar 3.1 dan dari persamaan di atas, diperoleh persamaan
tegangan dan arus komponen maju ( forward ) dan mundur ( backward ).
Va = Vaf + Vab
Ia = Iaf + Iab
Dengan memperhatikan rangkaian ekivalen yang ditunjukan pada gambar 3.1
dan gambar 3.2 maka akan diperoleh arus di rotor untuk komponen maju (I2f) dan
mundur (I2b).
I2b = ………...………..(3.6)
Maka persamaan torsi untuk keadaan tegangan tidak seimbang diperoleh.
Te = Tef + Teb = + ………(3.7)
Maka untuk keadaan start S = 1 maka persamaan (3.5) menjadi
Te = Tef + Teb = + ………...………(3.8)
dan untuk keadaan maksimum S = Smax sesuai dengan persamaan (3.7) maka
persamaan (3.8) menjadi
Te = Tef + Teb = + ………(3.9)
Ketidakseimbangan tegangan masukan dapat diperoleh dengan persamaan
dibawah ini.
BAB IV
ANALISA PENGARUH TEGANGAN TIDAK SEIMBANG
TERHADAP TORSI START – TORSI MAKSIMUM
MOTOR INDUKSI TIGA PHASA STARTING LANGSUNG
4.1 UMUM
Untuk dapat melihat pengaruh tegangan tidak seimbang terhadap torsi start -
torsi maksimum motor induksi tiga phasa, maka diperlukan suatu percobaan
pembebanan pada motor induksi.
4.2. PERALATAN YANG DIGUNAKAN
Peralatan yang digunakan dalam percobaan ini adalah:
1. Motor induksi tiga fasa
tipe : rotor belitan
spesifikasi motor: - AEG Typ C AM 112MU 4RI
- ∆/Y 220/380 V 10,7 / 6,2 A
- 2,2 Kw, cosφ 0,67
- 1410 rpm, 50 Hz
- isolasi B
2. Amperemeter
4. Tahanan geser
5. Watt meter 3φ
6. Sumber tegangan AC dan DC
4.3 PERCOBAAN UNTUK MENDAPATKAN PARAMETER – PARAMETER MOTOR INDUKSI TIGA FASA
Untuk dapat menentukan parameter motor induksi tiga fasa jenis rotor belitan,
maka dapat dilakukan dengan percobaan berikut ini:
4.3.1 PERCOBAAN TAHANAN DC
A. PERCOBAAN TAHANAN DC PADA BELITAN STATOR
1. RANGKAIAN PERCOBAAN
A
V U
V
W +
-VDC Variabel
Ru
Rv
[image:62.595.102.476.415.594.2]Rw
Gambar – 4.1
Gambar 4.1 Rangkaian percobaan tahanan dc pada stator
2. PROSEDUR PERCOBAAN
1. Hubungan belitan stator dibuat hubungan Y yang akan diukur adalah dua dari
ketiga belitan stator.
3. Tegangan DC suplai dinaikkan sampai pada nilai tertentu.
4. Ketika tegangan menunjukkan pada besaran 15,4 Volt, penunjukan alat ukur
voltmeter dan amperemeter dicatat
5. jika telah selesai Rangkaian dilepas.
3. DATA HASIL PERCOBAAN
Tabel 4.1 Data hasil percobaan tahanan dc pada belitan stator
Rdc = I V
(Ω)
Phasa V (volt) I (Ampere)
U – V 12,89 4,2
4. ANALISA DATA Untuk data di atas di peroleh :
Rdc = I V
=
= 3,07 Ω
Karena hubungan pada rotor adalah Y , maka Rdc adalah :
Rdc =
=
1.535 ΩRac = 1.2 x 1.535
= 1.84 Ω
B. PERCOBAAN TAHANAN DC PADA BELITAN ROTOR 1. RANGNKAIAN PERCOBAAN
Gambar 4.2. Gambar percobaan tahanan dc pada rotor
2. PROSEDUR PERCOBAAN
1. hubungan belitan rotor dibuat hubungan Y, yang akan diukur adalah dua dari
ketiga belitan rotor.
2. Rangkaian belitan rotor dihubungkan dengan suplai tegangan DC
3. naikkan Tegangan DC suplai secara perlahan, sampai pada nilai tertentu.
4. Ketika tegangan menunjukkan pada besaran 3,5 Volt, penunjukan alat ukur
voltmeter dan amperemeter dicatat
5. jika telah selesai Rangkaian dilepas.
[image:64.595.105.477.158.317.2]3. DATA HASIL PERCOBAAN
Tabel 4.2 Data hasil percobaan tahanan dc pada belitan rotor
Phasa V (volt) I (Ampere)
4. ANALISA DATA Untuk data di atas di peroleh :
Rdc = I V
(Ω)
=
= 0.7 Ω
Karena hubungan pada rotor adalah Y , maka Rdc adalah :
Rdc =
=
0.35ΩRac = 1.2 x 0.35
= 0,42 Ω
Maka tahanan rotor adalah :
Rr = 0.42 Ω
4.3.2 PERCOBAAN ROTOR TERTAHAN ( BLOCK ROTOR )
1. RANGKAIAN PERCOBAAN
Dari data yang didapat pada pengukuran motor dalam keadaan rotor tertahan
atau hubung singkat maka dihitung X1 dan X2'. Rangkaian pengukuran ketika
W3phasa
PT AC1 3 Phasa
MI V1
A1
T Mesin
DC
S3
S2
PT DC1
PT DC
2
A3
S1
[image:66.595.90.469.69.264.2]V2 V3
Gambar – 4.3
Gambar 4.3. Gambar rangkaian percobaan rotor tertahan
2. PROSEDUR PERCOBAAN
Prosedur yang dilakukan untuk memperoleh data hubung singkat adalah :
1. Motor induksi dikopel dengan mesin arus searah
2. Semua switch dalam keadaan terbuka, pengatur tegangan dalam kondisi
minimum.
3. Switch S1 ditutup, PTAC1 dinaikkan sehingga motor induksi mulai berputar
perlahan.
4. Switch S3 kemudian ditutup, PTDC2 dinaikkan sampai penunjukan amperemeter
A3 mencapai harga arus penguat nominal mesin arus searah
5. Switch S2 ditutup dan PTDC1 dinaikkan sehingga mesin arus searah memblok
putaran motor induksi dan putaran berhenti. Kemudian penunjukan alat ukur A1,
W dan T dicatat
3. DATA HASIL PERCOBAAN ROTOR TERTAHAN Tabel 4.3 Data hasil percobaan block rotor
Vbr (Volt) IBR ( Ampere ) PBR ( Watt ) F1 (Hz) Fbr (Hz)
98 6,2 575 50 50
4. ANALISA DATA Dari data di atas diperoleh :
=
=
9.125 Ω
=
=
=
=
7.6528 Ω=
3.8264 Ω4.3.3 PERCOBAAN BEBAN NOL 1. RANGKAIAN PERCOBAAN
PT AC1 3 Phasa A
V
MI
Watt Meter 3 Φ
R S T
[image:68.595.127.452.150.331.2]Beban Nol
Gambar – 4.4
Gambar 4.4 Rangkaian Percobaan Beban Nol
2. PROSEDUR PERCOBAAN
Prosedur yang dilakukan untuk memperoleh data yang diperlukan adalah :
1. Semua switch terbuka, pengatur tegangan pada posisi minimum
2. Switch S1 kemudian ditutup, PTAC1 dinaikkan perlahan sampai tegangan
350 Volt.
3. Ketika tegangan 350 Volt, dicatat besar pembacaan alat ukur amperemeter masing
masing phasa dan wattmeter.
4. Setelah dicatat, rangkaian dilepas.
3. DATA HASIL PERCOBAAN
Tabel 4.4 Data Hasil Percobaan Beban Nol
0
V ( Volt ) P0( watt ) I0 (Ampere)
4. ANALISA DATA Dari dara di atas diperoleh :
1 1
3 X
I V X
nl
m = − (Ω)
=
= 56.84 Ω
4.4 PERCOBAAN PENGARUH TEGANGAN TIDAK SEIMBANG
TERHADAP TORSI START-TORSI MAKSIMUM MOTOR INDUKSI TIGA PHASA STARTING LANGSUNG
[image:69.595.98.434.403.546.2]4.4.1 RANGKAIAN PERCOBAAN
Gambar 4.5 Rangkaian Percobaan
4.4.2 PROSEDUR PERCOBAAN
1. Rangkailah rangkaian percobaan seperti gambar 4.5 di atas.
2. atur tahanan variabel sehingga menghasilkan tegangan suplai yang tidak
seimbang sesuai dengan data yang diinginkan..
5. Tutup S1 lalu catat penunjuk A1,P1, , dan T pada keadaan start.
6. Ulangi prosedur no 1 sampai 6 dengan memperbesar salah satu tahanan luar
dengan nilai yang ditentukan, yaitu :
1. Ketidakseimbangan 5 %
Vrs = 227 volt Vst = 220 volt Vrt = 216 volt
2. Ketidakseimbangan 6 %
Vrs = 230 volt Vst = 220 volt Vrt = 216 volt
3. Ketidakseimbangan 7 %
Vrs = 230 volt Vst = 220 volt Vrt = 214 volt
4. Ketidakseimbangan 8 %
Vrs = 232 volt Vst = 220 volt Vrt = 214 volt
7. Percobaan selesai.
[image:70.595.86.538.512.694.2]4.4.3 DATA HASIL PERCOBAAN
Tabel 4.5 Hasil percobaan pengaruh tegangan tidak seimbang terhadap torsi start – torsi maksimum motor induksi
% Ketidakse
imbangan
Tegangan ( Volt ) Pin
( Kw )
Torsi start
( N.m )
Ar