PENGEMBANGAN DAN IMPLEMENTASI
SISTEM PEMADAMAN API PADA
FIRE-FIGHTING ROBOT
MUHAMMAD LUQMAN ROSYADI
DEPARTEMEN ILMU KOMPUTER
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa skripsi berjudul Pengembangan dan Implementasi Sistem Pemadaman Api pada Fire-fighting Robot adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
ABSTRAK
MUHAMMAD LUQMAN ROSYADI. Pengembangan dan Implementasi Sistem Pemadaman Api pada Fire-fighting Robot. Dibimbing oleh KARLISA PRIANDANA.
Kebakaran sering terjadi dan telah menimbulkan banyak korban. Butuh reaksi yang cepat untuk menemukan dan memadamkan sumber api sebelum api menyebar. Karena berbahaya, campur tangan manusia dalam memadamkan api perlu dibuat seminimum mungkin. Untuk itu, diperlukan robot yang dapat mendeteksi sumber api sekaligus memadamkannya. Penelitian ini bertujuan untuk membuat sistem pemadam api dengan menggunakan mikrokontroler Arduino sebagai pengendali utama. Sistem pemadam api dibangun dengan dua metode. Metode pertama menggunakan tiupan angin, sedangkan metode kedua menggunakan semburan air. Kedua sistem dikontrol oleh relay. Hasil penelitian menunjukkan bahwa sensor api dapat mendeteksi api pada jarak 30 – 100 cm. Sistem pemadam api yang dibangun menggunakan metode tiupan angin dapat memadamkan api dari jarak maksimum 120 cm, sedangkan sistem pemadam api yang dibangun menggunakan semburan air tidak berhasil memadamkan api karena semburan air dari washer pump yang kurang kuat.
Kata kunci: Arduino, pemadamapi, sensorapi
ABSTRACT
MUHAMMAD LUQMAN ROSYADI. Development and Implementation of Fire Extinguisher System on a Fire-fighting Robot. Supervised by KARLISA PRIANDANA.
Fires are frequent and have caused many casualties. Need a quick response to find and extinguish the fire source before the fire spread. Due to its danger, human intervention in extinguishing the fire needs to be kept as minimum as possible. For that, a robot that can detect the source of the fire and extinguish it at the same time is required. This study aims to develop fire extinguishing systems using the Arduino microcontroller as the main controller. Two fire extinguishing systems were built with two different methods. The first method utilized the wind from a fan, while the second method used a washer pump. Both systems were controlled by a relay. The results showed that the flame sensor can detect the fire at a distance of 30 – 100 cm. The wind-based fire extinguishing system was found to be able to extinguish the fire from a maximum distance of 120 cm, while the water-based fire extinguishing system did not succeed because the water burst from the washer pump was inadequate.
Skripsi
sebagai salah satu syarat untuk memperoleh gelar Sarjana Komputer
pada
Departemen Ilmu Komputer
PENGEMBANGAN DAN IMPLEMENTASI
SISTEM PEMADAMAN API PADA
FIRE-FIGHTING
ROBOT
DEPARTEMEN ILMU KOMPUTER
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
BOGOR
2014
Penguji:
Judul Skripsi : Pengembangan dan Implementasi Sistem Pemadaman Api pada Fire-fightingRobot
Nama : Muhammad Luqman Rosyadi NIM : G64100033
Disetujui oleh
Karlisa Priandana, ST MEng Pembimbing I
Diketahui oleh
Dr Ir Agus Buono, MSi MKom Ketua Departemen
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah subhanahu wa ta’ala atas segala karunia-Nya sehingga karya ilmiah ini berhasil diselesaikan. Judul penelitian yang dilaksanakan sejak bulan November 2013 ini ialah Pengembangan dan Implementasi Sistem Pemadaman Api pada Fire-fighting Robot.
Penulis mengucapkan terima kasih yang tak terhingga kepada Ibu Karlisa Priandana, ST MEng selaku pembimbing atas arahan dan bimbingan selama penelitian dan penyusunan karya ilmiah ini hingga selesai. Terima kasih kepada Bapak/Ibu selaku penguji yang telah banyak memberi saran. Terima kasih yang tak terhingga kepada keluarga tercinta Ayah, Ibu, Mbak Ima, dan Adek Lala atas do’a, dukungan, dan kasih sayang yang selalu diberikan. Terima kasih kepada Sodik, Randa, Fikar, Ardi, dan semua anak lab NCC yang sudah membantu dikala susah. Terima kasih kepada Wahyu, Rivo, Dias, Romi, dan semua teman-teman Pixels 47 atas semua kebersamaan, kekeluargaan, semangat, canda tawa, dan motivasinya dan terima kasih kepada Fia Afiani Zakkyuntuk semuanya.
Semoga karya ilmiah ini bermanfaat.
DAFTAR ISI
DAFTAR GAMBAR vi
PENDAHULUAN 1
Latar Belakang 1
Perumusan Masalah 2
Tujuan Penelitian 2
Manfaat Penelitian 2
Ruang Lingkup Penelitian 2
METODE PENELITIAN 2
Studi Literatur 2
Perancangan Sistem 3
Persiapan Alat dan Bahan 3
Analisis 5
Perakitan Sistem Pendeteksi dan Pemadam Api 6
Implementasi Pada Robot 6
Pengujian 6
Evaluasi 7
HASIL DAN PEMBAHASAN 7
Perancangan Sistem 7
Persiapan Alat dan Bahan 8
Analisis 8
Perakitan Sistem Pendeteksi dan Pemadam Api 10
Implementasi Pada Robot 11
Pengujian 12
Evaluasi 14
SIMPULAN DAN SARAN 14
DAFTAR PUSTAKA 14
LAMPIRAN 16
DAFTAR GAMBAR
1 Alur metode penelitian 3
2 Flame sensor 4
3 Line trackingsensor 4
4 Arduino Uno 4
5 Penampang kipas 5
6 Rancangan komponen pendeteksi api dan pemadam api 6
7 Daerah penyebaran udara dari kipas 7
8 Perancangan sistem pendeteksi dan pemadam api 8
9 Rangkaian flame sensor 9
10 Rangkaian linetrackingsensor 9
11 Rangkaian sistem pemadam api dengan semburan air 9
12 Rangkaian sistem pemadam api dengan tiupan angin 10
13 Skema sistem pemadam api 10
14 Ilustrasi percobaan sistem untuk memadamkan api 11
15 Purwarupa fire-fightingrobot 11
16 Tampilan akuisisi data komponen penyusun fire-fighting robot 12
PENDAHULUAN
Latar Belakang
Kebakaran merupakan bencana yang paling sering dihadapi dan dapat terjadi setiap saat, karena banyak peluang yang dapat memicu terjadinya kebakaran. Contohnya yaitu api dari puntung rokok, kebakaran gas, api lilin, dan lain-lain. Oleh karena itu, dibutuhkan reaksi yang cepat untuk menemukan dan memadamkan sumber api dalam waktu singkat sehingga api tidak menyebar.
Pesatnya perkembangan teknologi saat ini, secara langsung meningkatkan peralatan dan perlengkapan yang digunakan dalam pemadaman kebakaran. Dengan peralatan yang canggih, pemadaman kebakaran dapat lebih efektif dan efisien. Selain itu, juga mengurangi risiko ke tingkat minimum dan kerusakan dari kebakaran dapat dikurangi (Tan et al. 2013).
Salah satu upaya yang dilakukan untuk menangani masalah kebakaran yang biasanya berbahaya adalah dengan menciptakan robot pemadam api. Robot ini dapat meminimalkan campur tangan manusia dalam upaya memadamkan api. Robot pemadam kebakaran adalah salah satu solusi yang mampu mengurangi resiko bahaya kebakaran pada pemadam kebakaran
Penelitian mengenai robot pemadam api telah banyak dilakukan. Wulandari (2013) telah berhasil membangun suatu robot hexapod yang dapat digunakan untuk berbagai keperluan, termasuk untuk memadamkan api. Chriswantoro (2013) berhasil mengimplementasikan dan menguji logika fuzzy dan wallfollowing untuk robot pemadam api. Sidik (2013) melakukan penelitian mengenai penggunaan sensor-sensor pada robot pemadam api. Untuk sensor deteksi api, ditentukan threshold nilai sensor yang digunakan untuk menentukan adanya api atau tidak yaitu sebesar 65.
Fokus penelitian ini adalah robot pemadam api yang merupakan robot dengan orientasi tujuan (goal-oriented robot) yang diadaptasi pada kontes fire-fighting robot dari Trinity College, Connecticut, Amerika Serikat (Permana 2012). Dalam sistem robot pemadam api, kemampuan dasar yang harus dimiliki adalah kemampuan mendeteksi asal api yang muncul dan kemampuan memadamkan api. Untuk itu, diperlukan sensor pendeteksi nyala api yang disebut flamedetector dan sistem pemadam api yang dapat dibuat dengan menggunakan air ataupun dengan tiupan angin.
2
Penelitian ini bertujuan untuk mengembangkan dua sistem pendeteksi dan pemadam api pada fire-fighting robot menggunakan tiupan angin dan semburan air, kemudian membandingkan kinerja kedua sistem tersebut.
Manfaat Penelitian
Penelitian ini diharapkan dapat mengembangkan sistem pemadam api yang baik dan efisien pada robot pemadam api dan mendukung pengembangan robotika di lingkungan Departemen Ilmu Komputer, Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Pertanian Bogor.
Ruang Lingkup Penelitian
Ruang lingkup penelitian ini yaitu:
• Jarak minimum antara sumber api dan robot untuk pemadaman yaitu 30 cm. • Tinggi sumber api disesuaikan dengan tinggi robot yang dikembangkan. • Warna trek yang digunakan adalah hitam dan putih.
• Masukan yang diterima oleh sensor pendeteksi api adalah gelombang ultraviolet.
• Keluaran yang dihasilkan sistem pemadam api berupa semburan air atau tiupan angin.
• Pengujian dilakukan pada ruangan tertutup dari cahaya luar.
METODE PENELITIAN
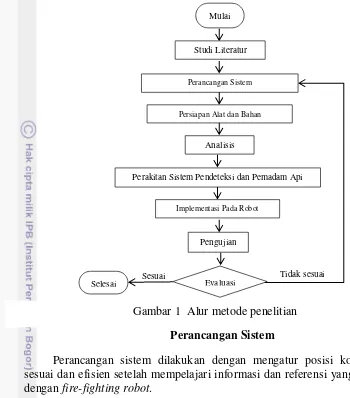
Metode yang digunakan pada penelitian ini terdiri dari serangkaian tahapan, yaitu: studi literatur, persiapan alat dan bahan, analisis, implementasi pada robot, pengujian pada robot, dan evaluasi. Alur tahapan penelitian dapat dilihat pada Gambar 1.
Studi Literatur
3
Perancangan Sistem
Perancangan sistem dilakukan dengan mengatur posisi komponen yang sesuai dan efisien setelah mempelajari informasi dan referensi yang berhubungan dengan fire-fighting robot.
Persiapan Alat dan Bahan
Komponen-komponen utama yang digunakan pada penelitian ini adalah sebagai berikut:
Dinamo
Dinamo digunakan untuk memutar kipas yang berfungsi sebagai pemadam api. Dinamo ini memiliki kecepatan rotasi sebesar 124 000 rotation per minute (rpm).
Washer pump
Washer pump berfungsi sebagai pemadam api dengan semburan air yang diambil dari water tank (tangki air). Washer pump mengambil air yang terdapat pada water tank (tangki air), lalu air disemburkan ke sumber api.
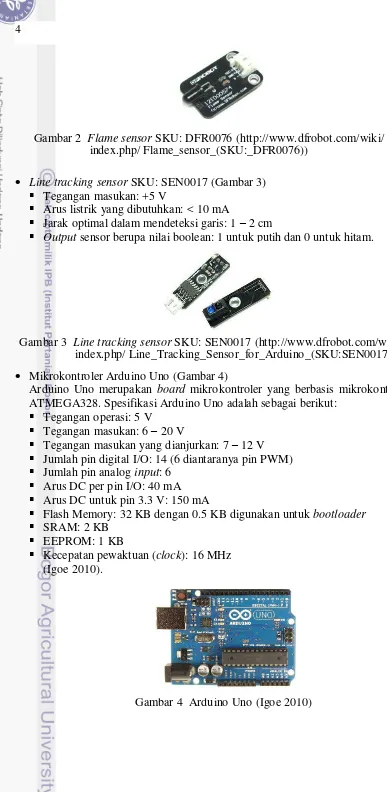
Flame sensor SKU: DFR0076 (Gambar 2)
Flame sensor ini menggunakan sensor YG1006. Sensor ini bekerja pada tegangan 3.3 V sampai 5 V, dapat mendeteksi nyala api pada jarak 20 cm (4.8 V) sampai 100 cm (1 V), waktu respon 15 us untuk mendeteksi nyala api, dan bekerja pada suhu -25 oC sampai 85 oC. Sensor YG1006 hanya dapat mendeteksi api atau panjang gelombang dengan spektrum 760 nm sampai 1100 nm (Cytron Technologies 2012).
Gambar 1 Alur metode penelitian
Studi Literatur
Perancangan Sistem
Persiapan Alat dan Bahan
Analisis
Perakitan Sistem Pendeteksi dan Pemadam Api
4
Line tracking sensor SKU: SEN0017 (Gambar 3) Tegangan masukan: +5 V
Arus listrik yang dibutuhkan: < 10 mA
Jarak optimal dalam mendeteksi garis: 1 – 2 cm
Output sensor berupa nilai boolean: 1 untuk putih dan 0 untuk hitam.
Mikrokontroler Arduino Uno (Gambar 4)
Arduino Uno merupakan board mikrokontroler yang berbasis mikrokontroler ATMEGA328. Spesifikasi Arduino Uno adalah sebagai berikut:
Tegangan operasi: 5 V Tegangan masukan: 6 – 20 V
Tegangan masukan yang dianjurkan: 7 – 12 V Jumlah pin digital I/O: 14 (6 diantaranya pin PWM) Jumlah pin analog input: 6
Arus DC per pin I/O: 40 mA Arus DC untuk pin 3.3 V: 150 mA
Flash Memory: 32 KB dengan 0.5 KB digunakan untuk bootloader SRAM: 2 KB
EEPROM: 1 KB
Kecepatan pewaktuan (clock): 16 MHz (Igoe 2010).
Gambar 2 Flamesensor SKU: DFR0076 (http://www.dfrobot.com/wiki/ index.php/ Flame_sensor_(SKU:_DFR0076))
Gambar 4 Arduino Uno (Igoe 2010)
Gambar 3 Line trackingsensor SKU: SEN0017 (http://www.dfrobot.com/wiki/
5
Analisis
Setelah dilakukan pengumpulan alat dan bahan, dilakukan analisis kemampuan tiap komponen secara bergantian. Tiap komponen akan dianalisis menggunakan mikrokontroler bertipe Arduino Uno yang berfungsi sebagai otak dari semua komponen yang saling terhubung. Analisis pada flame sensor akan menggunakan rangkaian sederhana untuk diambil nilai pengukurannya, seperti analisis yang dilakukan oleh Sidik (2013). Analisis pada flame sensor dilakukan pada 10 posisi sumber api yang berbeda dan juga pada kondisi tidak ada api. Setelah semua data didapat, ditentukan threshold untuk menentukan keberadaan api berdasarkan nilai pengukuran yang diperoleh.
Pada analisis line tracking sensor, sensor dianalisis dalam pembacaan warna hitam dan putih sesuai warna lantai yang digunakan pada KRPAI 2014. Untuk analisis sistem pemadam api, hanya dilakukan percobaan memadamkan api jika flame sensor mendeteksi adanya nyala api. Percobaan dilakukan dengan dua macam alat secara bergantian, yaitu memadamkan api menggunakan kipas yang digerakkan oleh dinamo dan memadamkan api dengan air menggunakan washer pump untuk menyemprotkan air.
Untuk sistem pemadam api menggunakan tiupan angin, dilakukan analisis debit udara yang dapat dipasok oleh kipas yang digerakkan oleh dinamo. Debit udara dari kipas dihitung dengan menggunakan Persamaan 1 sampai Persamaan 4 (Budianto 1996). Gambar 5 Penampang kipas (Budianto 1996)
D = A × t × rpm × n (1) d1 d2
t
6
Perakitan Sistem Pendeteksi dan Pemadam Api
Pada tahap perakitan, akan dilakukan penggabungan antara sensor pendeteksi api, komponen pemadam api, dan mikrokontroler. Setelah diketahui nilai threshold dari analisis yang dilakukan flame sensor, dilakukan perakitan jarak dan tinggi yang tepat untuk memadamkan nyala api. Jarak yang ditentukan oleh KRPAI 2014 adalah 30 cm dari sumber api dan tinggi sumber api disesuaikan dengan posisi pemadam api. Jadi, data yang keluar dari flame sensor akan diolah oleh mikrokontroler dengan membandingkan nilai tersebut dengan nilai threshold yang sudah didapatkan. Jika nilai yang dihasilkan mengidentifikasikan adanya nyala api, mikrokontroler akan mengolah lagi nilai dari flame sensor untuk disesuaikan dengan jarak yang ditentukan oleh KRPAI (2014) yaitu 30 cm. Sistem pemadam api berfungsi jika flame sensor mendeteksi adanya nyala api pada jarak 30 cm atau lebih. Sistem pemadam api yang akan dirakit ada dua macam yaitu pemadam api dengan kipas dan pemadam api dengan air.
Implementasi Pada Robot
Sistem pendeteksi api dan sistem pemadaman api yang telah dirakit, diimplementasikan pada robot dan dihubungkan dengan modul lain yang terdapat pada fire-fighting robot agar dapat digunakan bersama-sama dan saling bekerjasama dengan baik. Posisi sensor pendeteksi dan pemadam api terletak pada bagian depan robot agar robot dapat dengan mudah mendeteksi nyala api dan langsung dapat memadamkan nyala api tersebut dengan cepat. Letak dari posisi komponen pendeteksi dan pemadam api seperti terlihat pada Gambar 6.
Pengujian
Pengujian dilakukan melalui eksperimen. Beberapa kriteria pengujian yang digunakan adalah :
1 Flame sensor dapat mendeteksi nyala api dari jarak maksimal 100 cm.
2 Sistem pemadam api dapat memadamkan api lilin dari jarak minimum 30 cm (KRPAI 2014).
Pada jarak maksimum pemadaman, besar debit udara yang diperlukan untuk memadamkan api bernilai minimum. Perhitungan debit minimum ini dilakukan
Gambar 6 Rancangan komponen pendeteksi api dan pemadam api (Wulandari 2013)
7 dengan menggunakan Persamaan 5 dan 6 (Budianto 1996). Ilustrasi pemadaman dapat dilihat pada Gambar 7.
Pada tahap ini, dilakukan evaluasi mengenai keberhasilan dan kekurangan sistem, sehingga dapat diketahui kelayakan dari sistem pendeteksi api dan pemadam api berdasarkan kriteria KRPAI 2014. Hal-hal yang dievaluasi antara lain waktu pemadaman api sejak nyala api terdeteksi.
HASIL DAN PEMBAHASAN
Perancangan Sistem
Sistem yang akan dibuat mengacu pada tujuan dari pengembangan robot untuk memadamkan api yaitu bagaimana mendeteksi api dan memadamkan api dengan cepat. Pada Gambar 8 terlihat posisi komponen pendeteksi api, pemadam api, dan pendeteksi warna terletak pada bagian depan robot. Posisi ini memungkinkan pendeteksian sumber api dengan mudah dan pemadaman api dengan cepat. Ketika alat pendeteksi mendeteksi nyala api, maka alat pemadam akan aktif. Sebaliknya, ketika alat pendeteksi tidak mendeteksi nyala api, maka alat pemadam akan menjadi tidak aktif.
Dari panduan dan ketentuan yang diberikan pada KRPAI 2014, trek yang digunakan yaitu warna hitam dan sumber api dikelilingi oleh garis putih sebagai tanda jarak minimum untuk memadamkan api, yaitu 30 cm dari nyala api. Untuk membedakan antara warna garis yang mengelilingi api dengan warna trek, dibutuhkan komponen pendeteksi warna pada bagian bawah robot. Saat
Keterangan:
A = luas penampang daerah awal (m2) D = debit udara dari kipas (m3)
Am = luas penampang daerah pemadaman Dm = debit udara minimum pada daerah
maksimum (m2) pemadaman maksimum (m3) r = jarak pemadaman maksimum (m)
Gambar 7 Daerah penyebaran udara dari kipas Daerah penampang kipas
8
komponen mendeteksi warna garis putih sebagai jarak minimum pemadaman dan alat pendeteksi api menemukan adanya nyala api, maka robot akan berhenti dan langsung memadamkan api sampai nyala api berhasil dipadamkan.
Persiapan Alat dan Bahan
Komponen-komponen yang dipersiapkan sesuai dengan desain sistem adalah:
1 buah mikrokontroler Arduino Uno 1 buah dinamo
Untuk menganalisis masing-masing komponen yang digunakan untuk membuat sistem pemadam api pada fire-fighting robot, dilakukan perangkaian sederhana terhadap setiap komponen dengan menggunakan mikrokontroler Arduino Uno sebagai otak dari semua komponen penyusun fire-fighting robot. Perangkaian komponen dimulai dengan flame sensor yang dihubungkan dengan mikrokontroler Arduino Uno, seperti terlihat pada Gambar 9. Analisis pada flame sensor telah dilakukan oleh Sidik (2013) dengan mendeteksi sumber api pada kondisi rentang jarak yang berbeda yaitu 10 cm, 20 cm, sampai 100 cm dan kondisi tidak ada nyala api. Lalu, diambil nilai pengukuran min dan max dari nilai pendeteksian flame sensor dan didapatkan nilai threshold sebagai kondisi ada tidaknya api yaitu 65.
Pada perangkaian line tracking sensor dengan mikrokontroler, analisis sensor hanya dilakukan dengan membedakan kondisi lantai berwarna hitam dan putih. Pin yang digunakan pada mikrokontroler sebagai nilai output yang dihasilkan oleh line tracking sensor adalah pin digital, karena hanya membutuhkan nilai 1 dan 0. Dari pendeteksian warna trek yang digunakan pada
Gambar 8 Perancangan sistem pendeteksi dan pemadam api Tampak depan robot
Pemadam api Pendeteksi api
9 KRPAI 2014, didapatkan nilai 1 untuk warna putih dan nilai 0 untuk warna hitam. Rangkaian line tracking sensor dapat dilihat pada Gambar 10.
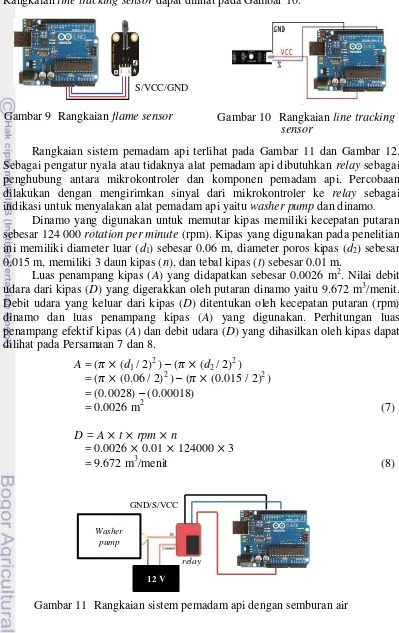
Rangkaian sistem pemadam api terlihat pada Gambar 11 dan Gambar 12. Sebagai pengatur nyala atau tidaknya alat pemadam api dibutuhkan relay sebagai penghubung antara mikrokontroler dan komponen pemadam api. Percobaan dilakukan dengan mengirimkan sinyal dari mikrokontroler ke relay sebagai indikasi untuk menyalakan alat pemadam api yaitu washer pump dan dinamo.
Dinamo yang digunakan untuk memutar kipas memiliki kecepatan putaran sebesar 124 000 rotation per minute (rpm). Kipas yang digunakan pada penelitian ini memiliki diameter luar (d1) sebesar 0.06 m, diameter poros kipas (d2) sebesar
0.015 m, memiliki 3 daun kipas (n), dan tebal kipas (t) sebesar 0.01 m.
Luas penampang kipas (A) yang didapatkan sebesar 0.0026 m2. Nilai debit udara dari kipas (D) yang digerakkan oleh putaran dinamo yaitu 9.672 m3/menit. Debit udara yang keluar dari kipas (D) ditentukan oleh kecepatan putaran (rpm) dinamo dan luas penampang kipas (A) yang digunakan. Perhitungan luas penampang efektif kipas (A) dan debit udara (D) yang dihasilkan oleh kipas dapat dilihat pada Persamaan 7 dan 8.
A = ( × (d1 / 2)2 ) – ( × (d2 / 2)2 )
Gambar 11 Rangkaian sistem pemadam api dengan semburan air relay
S/VCC/GND
10
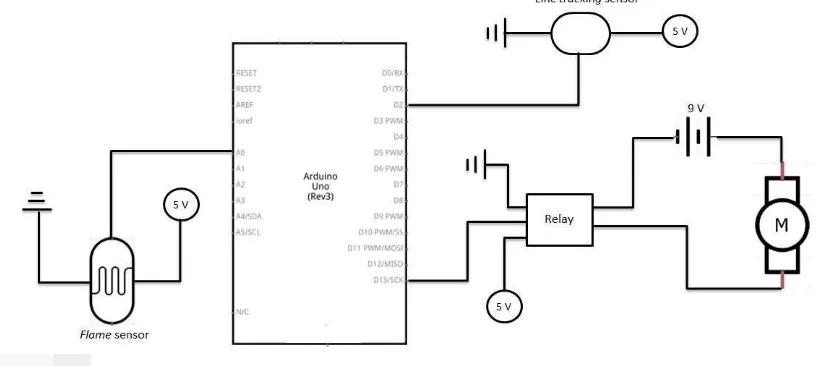
Perakitan Sistem Pendeteksi dan Pemadam Api
Perakitan sistem dilakukan dengan menggabungkan komponen-komponen yang telah dianalisis. Mikrokontroler sebagai otak utama dari sistem pada fire-fighting robot akan digabungkan dengan flame sensor, line tracking sensor, dan komponen pemadam api. Perakitan sistem dibuat dengan menghubungkan tiap komponen dengan dikendalikan oleh mikrokontroler. Skema sistem pemadam api dapat dilihat pada Gambar 13.
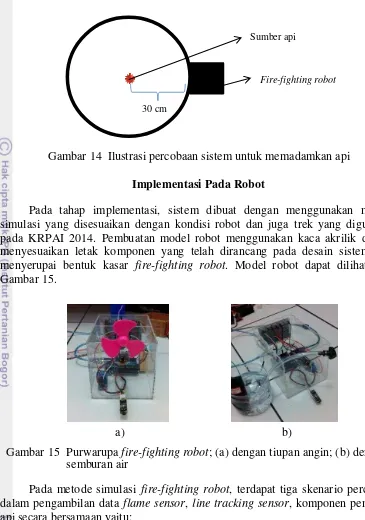
Komponen penyusun fire-fighting robot telah terhubung, lalu dilakukan percobaan sistem pendeteksi dan pemadam api untuk memadamkan nyala api dengan jarak yang sesuai dengan ketentuan KRPAI 2014 yaitu 30 cm dari sumber api. Sistem yang telah dirakit diletakkan pada jarak 30 cm di depan sumber api dengan lantai berwarna putih. Line tracking sensor akan mendeteksi warna putih sebagai wilayah jarak minimum untuk memadamkan api. Setelah itu flame sensor akan mendeteksi ada tidaknya nyala api dengan membandingkan nilai yang keluar dari flame sensor dengan nilai threshold yang telah ditentukan pada penelitian Sidik (2013). Jika nyala api terdeteksi, maka mikrokontroler akan mengirimkan sinyal pada relay untuk menyalakan sistem pemadam api. Percobaan dilakukan dengan menggunakan 2 sistem pemadam yang berbeda secara berulang-ulang, yaitu menggunakan kipas yang digerakkan oleh dinamo dan menggunakan washer pump untuk menyemburkan air. Ilustrasi percobaan sistem pendeteksi dan pemadam api untuk memadamkan nyala api dapat dilihat pada Gambar 14.
GND/S/VCC
9 V
Gambar 12 Rangkaian sistem pemadam api dengan tiupan angin
relay
11
Implementasi Pada Robot
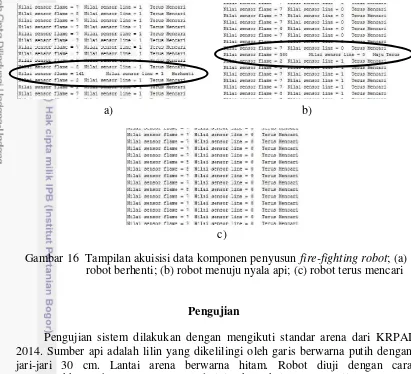
Pada tahap implementasi, sistem dibuat dengan menggunakan metode simulasi yang disesuaikan dengan kondisi robot dan juga trek yang digunakan pada KRPAI 2014. Pembuatan model robot menggunakan kaca akrilik dengan menyesuaikan letak komponen yang telah dirancang pada desain sistem agar menyerupai bentuk kasar fire-fighting robot. Model robot dapat dilihat pada Gambar 15.
Pada metode simulasi fire-fighting robot, terdapat tiga skenario percobaan dalam pengambilan data flame sensor, line tracking sensor, komponen pemadam api secara bersamaan yaitu: dan robot akan terus mencari sumber api (Gambar 16(c)).
Source code pengambilan data secara bersamaan komponen penyusun fire-fighting robot dapat dilihat pada Lampiran 1. Hasil akuisisi data secara bersamaan dapat dilihat pada Gambar 16:
• kolom pertama berisi data flame sensor, 30 cm
Sumber api
Fire-fighting robot
Gambar 14 Ilustrasi percobaan sistem untuk memadamkan api
a) b)
Gambar 15 Purwarupa fire-fightingrobot; (a) dengan tiupan angin; (b) dengan
12
• kolom kedua berisi data line trackingsensor, dan
• kolom ketiga berisi tindakan yang akan dilakukan fire-fighting robot.
Pengujian
Pengujian sistem dilakukan dengan mengikuti standar arena dari KRPAI 2014. Sumber api adalah lilin yang dikelilingi oleh garis berwarna putih dengan jari-jari 30 cm. Lantai arena berwarna hitam. Robot diuji dengan cara menggerakkan robot secara manual dari jarak maksimum pengujian (100 cm) sampai jarak 30 cm ke arah sumber api. Saat robot mendeteksi nyala api pada jarak lebih dari 30 cm, sistem pemadam api akan langsung berfungsi dan robot tetap bergerak mendekati sumber api. Robot berhenti bergerak saat line tracking sensor mendeteksi warna putih (data line tracking sensor = 1) pada lantai dan sistem pemadam api tetap aktif. Sistem pemadam api akan menjadi non-aktif saat sumber api berhasil dipadamkan atau ketika flame sensor tidak lagi mendeteksi adanya nyala api.
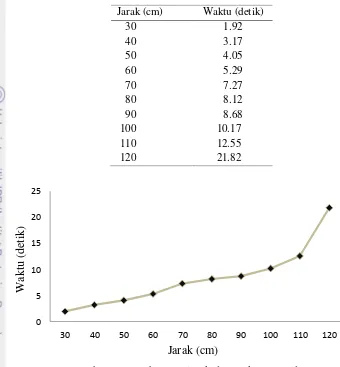
Pengujian pada jarak yang berbeda menunjukkan bahwa robot dapat mendeteksi nyala api dari jarak 30 cm sampai jarak maksimum pengujian (100 cm). Waktu pemadaman api dengan menggunakan tiupan angin dapat dilihat pada Tabel 1. Terlihat bahwa sistem yang dibuat dengan tiupan angin dapat memadamkan api pada jarak 30 cm sampai 120 cm. Jarak pemadaman berpengaruh terhadap waktu yang dibutuhkan untuk memadamkan api. Pada Gambar 17 terlihat bahwa grafik waktu memadamkan api naik sesuai dengan bertambahnya jarak pemadaman api. Sementara itu, sistem yang dibuat dengan semburan air tidak dapat memadamkan api karena air yang keluar dari washer pump tidak mencapai sumber api dari jarak 30 cm.
Gambar 16 Tampilan akuisisi data komponen penyusun fire-fighting robot; (a)
srobot berhenti; (b) robot menuju nyala api; (c) robot terus mencari c)
13
Dari hasil pengujian pemadaman menggunakan tiupan angin, sistem pemadam api menggunakan tiupan angin berhasil memadamkan api dari jarak 30 cm sampai 120 cm. Dari hasil pengujian ini, diketahui bahwa nilai debit udara mininum (Dm) yang diperlukan untuk memadamkan api pada jarak 120 cm (r)
adalah 0.0055 m3/menit. Perhitungan debit udara minimum (Dm) terkait dengan
luas penampang kipas (A) pada Persamaan 7, debit udara yang dihasilkan oleh kipas (D) pada Persamaan 8, dan luas daerah pemadaman (Am) pada Persamaan 9,
ditunjukkan pada Persamaan 10.
Tabel 1 Pengujian pemadaman api menggunakan tiupan angin dari kipas dengan dinamo 124 000 rpm
14
Evaluasi
Hasil pengujian menunjukkan bahwa sensor-sensor yang terhubung dapat berfungsi dengan baik dan menghasilkan output yang sesuai harapan. Flame sensor dapat mendeteksi nyala api sampai jarak 100 cm. Namun, flame sensor tidak dapat mendeteksi nyala api apabila posisi flame sensor tidak lurus dengan sumber api. Sistem pemadam api dengan tiupan angin berhasil memadamkan api sesuai dengan ketentuan KRPAI 2014. Namun, sistem pemadam api dengan semburan air tidak dapat memadamkan api. Hal ini disebabkan oleh semburan air dari washer pump yang kurang kuat sehingga air yang keluar tidak dapat mencapai sumber api meskipun dilakukan dari jarak minimum pengujian pemadaman (30 cm).
SIMPULAN DAN SARAN
Sistem pendeteksi api dapat mendeteksi nyala api pada jarak 30 cm sampai 100 cm dengan catatan posisi flame sensor lurus dengan sumber api. Sistem pemadam api dengan tiupan angin berhasil memadamkan api pada jarak minimum pemadaman (30 cm) sampai 120 cm sesuai dengan ketentuan KRPAI 2014. Jarak pemadaman berpengaruh terhadap waktu yang dibutuhkan untuk memadamkan api. Semakin jauh jarak pemadaman maka waktu yang dibutuhkan untuk memadamkan api akan semakin lama. Pada jarak 120 cm debit udara yang diperlukan untuk memadamkan nyala api adalah 0,0055 m3/menit. Namun, sistem pemadam api dengan semburan air tidak dapat memadamkan api karena kekuatan semburan yang tidak memadai. Selain itu, water tank membutuhkan tempat yang besar untuk menampung air. Berat dari water tank juga akan membebani pergerakan robot jika sistem pemadam api dengan air diimplementasikan pada fire-fighting robot. Oleh karena itu, sistem pemadam api dengan menggunakan tiupan angin lebih direkomendasikan untuk diimplementasikan pada fire-fighting robot.
DAFTAR PUSTAKA
Budianto AD. 1996. Sistem Pengeringan Kayu. Yogyakarta (ID): Kanisius.
Chriswantoro EMY. 2013. Sistem navigasi pada robot pemadam api menggunakan wall following dan logika fuzzy [skripsi]. Bogor (ID): Institut Pertanian Bogor.
Cytron Technologies. 2012. Flame sensor module getting started guide [datasheet]. Johor (MY): Cytron Technologies.
[Dikti] Direktorat Pendidikan Tinggi. 2012. Panduan Kontes Robot Pemadam Api Indonesia (KRPAI) Beroda dan Berkaki 2014. Jakarta: Direktorat Pendidikan Tinggi.
15 Permana FH. 2012. Perancangan sistem gerak dan sistem navigasi pada robot hexapod berbasis Arduino Mega1280 [skripsi]. Yogyakarta (ID): Sekolah Tinggi Manajemen Informatika dan Komputer.
Sidik NM. 2013. Analisis dan penerapan sensor jarak, sensor garis, sensor deteksi api, dan sensor garis pada fire fighting robot [skripsi]. Bogor (ID): Institut Pertanian Bogor.
Tan CF, Liew SM, Alkahari MR, Ranjit SSS, Said MR, Chen W, Rauterberg GWM, Sivakumar D, Sivarao. 2013. Fire fighting mobile robot: state of the art and recent development. Australian Journal of Basic and Applied Sciences. 7(10): 220-230
16
17
18
RIWAYAT HIDUP
Penulis dilahirkan di Malang, Jawa Timur pada tanggal 1 Maret 1993 dari ayah bernama Mochamad Ridwan dan ibu bernama Saadatul Achadiyah. Penulis merupakan anak kedua dari 3 bersaudara. Pada tahun 2010, penulis menamatkan pendidikan di SMA Negeri 2 Kota Bengkulu. Penulis lulus seleksi masuk Institut Pertanian Bogor (IPB) pada tahun 2010 melalui jalur Undangan Seleksi Masuk IPB (USMI) di Departemen Ilmu Komputer, Fakultas Matematika dan Ilmu Pengetahuan Alam.