PEMANFAATAN DAN PENGUJIAN SENSOR WATER FLOW
PADA KONTROL ALIRAN AIR BERBASIS
MIKROKONTROLER ATMEGA8535
TUGAS AKHIR
IWAN PRIMUS GULTOM 122408025
PROGRAM STUDI D3 FISIKA DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PEMANFAATAN DAN PENGUJIAN SENSOR WATER FLOW
PADA KONTROL ALIRAN AIR BERBASIS
MIKROKONTROLER ATMEGA8535
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh Ahli Madya
IWAN PRIMUS GULTOM 122408025
PROGRAM STUDI D3 FISIKA DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : Pemanfaatan Dan Pengujian Sensor Water Flow Pada Kontrol Aliran Air Berbasis Mikrokontroler Atmega8535
Kategori : Tugas Akhir
Nama : Iwan Primus Gultom
Nomor Induk Mahasiswa : 122408025 Program Studi : FISIKA D-III
Departemen : FISIKA
Fakultas : Matematika Dan Ilmu Pengetahuan Alam Universitas Sumatera Utara
Diluluskan di Medan, 28 Juli 2015
Diketahui Oleh
Departemen Fisika FMIPA USU
Ketua Program Studi, Pembimbing,
PERNYATAAN
PEMANFAATAN DAN PENGUJIAN SENSOR WATER FLOW PADA KONTROL ALIRAN AIR BERBASIS
MIKROKONTROLER ATMEGA8535
TUGAS AKHIR
Saya mengakui bahwa tugas akhir ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebut sumbernya.
Medan, 28 Juli 2015
PENGHARGAAN
Puji syukur penulis panjatkan ke hadirat Tuhan Yang Maha Esa, berkat rahmat
dan karuniaNya penulis dapat menyelesaikan tugas akhir ini.
Tugas Akhir ini berjudul PEMANFAATAN DAN PENGUJIAN SENSOR
WATER FLOW PADA KONTROL ALIRAN AIR BERBASIS MIKROKONTROLER ATMEGA8535, meskipun dalam proses penulisan banyak menemui hambatan dan rintangan namun dengan usaha maksimal yang dilakukan
penulis serta bantuan dari berbagai pihak, akhirnya tugas akhir ini dapat selesai. Atas bantuan dan motivasi yang diberikan, maka penulis mengucapkan banyak
terimakasih kepada :
1 Bapak Prof. Dr. Sutarman, M.Sc selaku dekan FMIPA USU.
2 Bapak Drs. Marhaposan Situmorang selaku ketua departemen Fisika FMIPA
USU.
3 Ibu Dr. Susilawati, M.Si selaku ketua program studi D3 Fisika FMIPA USU. 4 Bapak Dr. Perdinan Sinuhaji, MS selaku sekertaris program studi D3 Fisika
FMIPA USU sekaligus sebagai dosen penguji saya.
5 Bapak Dr. Kerista Tarigan, M.Eng.Sc selaku dosen pembimbing tugas akhir
saya yang telah meluangkan waktu , tenaga dan pikiran untuk membimbing dan mengarahkan penulis dalam menyelesaikan tugas akhir ini.
6 Seluruh dosen yang telah memberikan ilmu pengetahuan selama perkuliahan,
7 Teristimewa penulis mengucapkan terimakasih yang sedalam-dalamnya kepada Ayahanda Maruel Marcius Gultom dan Ibunda Manatap Mutiara Sidabutar, S.Pd yang telah begitu sabar, memberikan motivasi dalam segala
hal, mendoakan saya disetiap saat, dan telah memberikan kepercayaan kepada saya dalam menyelesaikan perkuliahan saya sehingga saya mampu
menyelesaikan perkuliahan dan tugas akhir ini dengan baik.
8 Terkhusus saya ucapkan terimakasih kepada kakak saya Rialas Siti Rani Gultom, AM.Keb, Adik-adik saya Restu Gultom, Candra Gultom dan Rahul
Gultom serta ito saya Nia Arissah Gultom dan Dewi Anitra Gultom yang selalu memberi semangat, motivasi, dukungan dan doa serta kepercayaan
sehingga saya dapat menyelesaikan perkuliahan dan tugas akhir ini dengan baik.
9 Seluruh keluarga besar saya yang selalu memberikan dukungan moral, doa
dan motivasi sehingga saya dapat menyelesaikan perkuliahan dan tugas akhir ini.
10 Kepada teman satu bimbingan Bapak Dr. Kerista Tarigan, M.Eng.Sc yang
telah sama-sama berjuang, saling membantu, dan bekerjasama dalam bimbingan dan menulis tugas akhir ini.
11 Kepada teman dekat saya, rekan sejati, sahabat terbaik saya : Ferdinand Malau (Big Bos), Andyus Manik (Kakak I), Alfredo Nababan (Kakak II), Sardo Haryson P Siboro (Kakak III), Junus Marasi Nainggolan (Kakak IV),
Yusuf D Manurung (Kakak V), Sadarma Manik (Kakak VI), Susanto Tumangger (Kakak VII), Hepry Boy Purba (Kakak VIII), Wahyu Sitorus
yang selalu bersama saling bercanda tawa, saling memberi dukungan doa dan motivasi serta saling membantu satu sama lain.
12 Kepada semua rekan-rekan di D-3 Fisika 2012 yang tak tersebutkan satu
persatu, terimakasih atas kerja samanya selama ospek, acara-acara yang digelar bersama dan perkuliahan serta ngelab bersama (Kompak kita dek?).
13 Kepada Abangda Fathurrahman, saya juga mengucapkan banyak terimakasih atas bantuannya, sehingga saya dapat menyelesaikan tugas akhir ini dengan baik.
Tugas Akhir ini penulis dedikasikan untuk mereka sebagai ungkapan penghargaan atas keikhlasan, kesabaran, dan kasih sayang yang tak terhingga.
Hanya Tuhan Yang Maha Esa yang dapat membalas semua jasa dan kebaikan yang penulis terima dari berbagai pihak yang telah membantu dalam penyelesaian laporan proyek ini.
Penulis menyadari dalam penyusunan tugas akhir ini masih terdapat kekurangan dan masih jauh dari kesempurnaan. Oleh karena itu, penulis sangat terbuka terhadap saran maupun kritikan dalam sebuah diskusi yang membangun
dari pembaca.
Akhir kata penulis mengharapkan semoga tugas akhir ini dapat bermanfaat
bagi pembaca.
PEMANFAATAN DAN PENGUJIAN SENSOR WATER FLOW PADA KONTROL ALIRAN AIR BERBASIS
MIKROKONTROLER ATMEGA8535
ABSTRAK
DAFTAR ISI
1.5. Sistematika Penulisan ... 3
BAB 2 LANDASAN TEORI 2.1. Water Flow Sensor YF-S201 ... 5
2.1.1. Spesifikasi Sensor Flow ... 5
2.2. Mikrokontroler ATMega8535 ... 7
2.2.1. Kontruksi ATMega8535 ... 9
2.2.2. Pin-pin Mikrokontroler ATMega8535 ... 12
2.3. EEPROM ATMega8535 ... 14
2.4. LCD (Liquid Crystal Display) ... 15
2.4.1. Konfigurasi Pin LCD ... 17
2.5. Relay ... 18
2.5.1. Jenis-Jenis Relay ... 18
2.6. Pengertian Debit Air ... 19
BAB 3 PERANCANGAN DAN PEMBUATAN 3.1. Diagram Blok Rangkaian ... 22
3.1.1. Fungsi Tiap Blok ... 22
3.2. Rangkaian Power Supplay Adaptor (PSA) ... 24
3.3. Rangkaian Mikrokontroler ATMega8535 ... 25
3.4. Perancangan Rangkaian LCD (Liquid Crystal Display) ... 26
3.5. Perancangan Sensor water Flow ... 27
3.6. Perancangan Relay dan Pompa ... 28
BAB 4 HASIL DAN PEMBAHASAN
4.1. Pengujian Rangkaian Power Supplay ... 31
4.2. Pengujian IC Mikrokontroler ATMega 8535 ... 31
4.3. Pengujian Display LCD ... 33
4.4. Pengujian Rangkaian Relay ... 35
4.5. Pengujian Rangkaian Water Flow Sensor ... 35
4.6. Pengujian Alat ... 37
4.7. Analisis Data Pengukuran Debit Air ... 38
BAB 5 KESIMPULAN DAN SARAN 5.1. Kesimpulan ... 42
5.2. Saran ... 42
DAFTAR TABEL
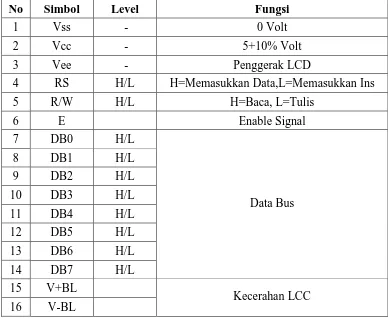
Tabel 2.1. Konfigurasi Pin LCD ... 17
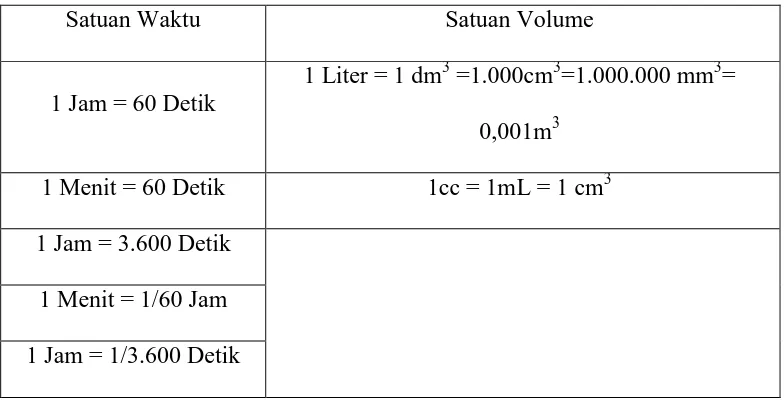
Tabel 2.2. Konversi Volume dan Waktu Untuk Dapat Mengetahui Debit Air ... 20
Tabel 4.1. Pengukuran IC mikrokontroler ATMega8535 ... 31
Tabel 4.2. Pengukuran pin IC LCD ... 34
Tabel 4.3. Tabel Pengujian Sensor ... 36
Tabel 4.4. Tabel Pengukuran Laju Air ... 38
DAFTAR GAMBAR
Gambar 2.1. Water Flow Sensor YF-S201 ... 5
Gambar 2.2. Konfigurasi Pin IC Mikrokontroler ATMega8535 ... 12
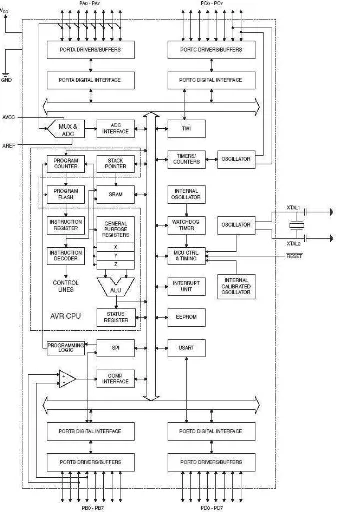
Gambar 2.3. Blok Diagram IC ATMega8535 ... 13
Gambar 2.4. LCD 16 x 2 ... 16
Gambar 3.1. Diagram Blok Sistem ... 22
Gambar 3.2. Rangkaian Power Supplay Adaptor (PSA) ... 24
Gambar 3.3. Rangkaian Sistem Minimum Mikrokontroler ATMega8535 ... 25
Gambar 3.4. Rangkaian LCD ... 27
Gambar 3.5. Rangkaian Water Flow Sensor ... 27
Gambar 3.6. Relay dan Pompa ... 28
Gambar 3.7. Flowchart Sistem ... 30
Gambar 4.1. Gambar Tegangan Output Ic Regulator 7805 ... 31
Gambar 4.2. Grafik Pulsa Sensor Terhadap Volume Air ... 36
Gambar 4.3. Grafik Pengukuran Debit Dalam 1 Liter ... 39
Gambar 4.4. Grafik Pengukuran Debit Dalam 2 Liter ... 40
PEMANFAATAN DAN PENGUJIAN SENSOR WATER FLOW PADA KONTROL ALIRAN AIR BERBASIS
MIKROKONTROLER ATMEGA8535
ABSTRAK
BAB 1
PENDAHULUAN
1.1. Latar Belakang Masalah
Berbagai jenis teknologi telah banyak diciptakan oleh manusia untuk dapat mempermudah manusia dalam melakukan pekerjaannya. Sebagai salah satu teknologi yang berkembang ialah teknologi di bidang pengukuran suatu aliran
fluida. Aplikasi pengendali aliran air ini sangat banyak diperlukan dalam hal-hal tertentu. Contohnya, pada suatu aliran instalasi air dari PDAM ke rumah warga,
pada pomb bensin untuk mengetahui banyak bensin yang di gunakan, pada pabrik kertas juga kita bisa menemukan alat seperti ini untuk pengukuran aliran bubur pulp pada pipa yang disalurkan pada tangki berikutnya, pada pengisian minuman
botol dan masih banyak lagi aplikasi lainnya.
Berangkat dari hal tersebut penulis ingin membuat alat ukur aliran suatu fluida dan pengendali aliran air dengan menggunakan water flow sensor YF-S201
sebagai sensor yang mendeteksi kecepatan aliran fluida dan di ubah menjadi pengendali aliran air, mikrokontroller ATMega8535 sebagai pusat kontrol sensor,
LCD sebagai display dari output sensor, PSA, Trafo, Relay, pompa air. Hasil menunjukkkan Mikrokontroler ATMega8535 mempunyai input sensor flow (sensor aliran), dan sensor ini akan mendeteksi kecepatan aliran suatu fluida yang
sebagai aliran fluida yang akan di deteksi sensor sekaligus dalam mengontrol aliran air yang di kendalikan oleh mikrokontroller.
Alat ini bekerja secara otomatis dengan merespon aliran air yang dideteksi
oleh water flow sensor YF-S201. Mikrokontroler ATmega8535 kemudian memproses output sensor yang berbentuk frekuensi signal analog (atau berbentuk
pulsa) dan mengubah signal tersebut ke digital atau sering disebut analog to digital. Setelah output sensor diproses oleh mikrokontroller kemudian ditampilkan pada LCD. Dengan demikian kita dapat menggunakan alat ini dengan mudah
untuk mengendalikan aliran air hanya cukup menekan keypad sesuai volume air yang kita inginkan dengan satuan liter (l), dan batas maksimum 3 liter.
1.2. Rumusan Masalah
Laporan Tugas Akhir ini membahas tentang perangkat keras yang meliputi
perakitan aplikasi water flow sensor YF-S201 sebagai sitem kontrol aliran air secara otomatis, yang terdiri dari water flow sensor YF-S201 sebagai pengendali volume level air, Mikrokontroler ATMega8535 sebagai pusat kendalinya beserta
software pemrograman dasar dari mokrokontroller, LCD sebagai tampilannya, Pompa air sebagai aliran fluida, dan PSA.
1.3. Tujuan Penulisan
Adapun tujuan penulisan laporan Tugas Akhir ini adalah untuk:
2. Pengembangan kreatifitas mahasiswa dalam bidang ilmu instrumentasi pengontrolan dan elektronika sebagai bidang diketahui.
3. Pengujian rangkaian Pemanfaatan Dan Pengujian Sensor Water Flow Pada
Kontrol Aliran Air Berbasis Mikrokontroler ATMegA8535.
1.4. Batasan Masalah
Mengacu pada hal diatas Penulis Merancang Pemanfaatan Dan Pengujian Sensor Water Flow Pada Kontrol Aliran Air Berbasis Mikrokontroler ATMegA8535,
dengan batasan-batasan sebagai berikut :
1. Pembahasan mikrokontroler ATMega8535.
2. Sensor yang digunakan adalah waterflow sensor YF-S201 sebagai sensor pengendali volume air dan sekaligus sebagai pengukuran kecepatan aliran fluida.
3. Pembahasan hanya meliputi rangkaian Mikrokontroler ATMega8535,
water flow sensor YF-S201, rangkaian pendukung, analisa pengukuran
beserta program dasarnya.
1.5. Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman, maka penulis membuat sistematika penulisan laporan ini sebagai berikut:
BAB 1 PENDAHULUAN
Meliputi latar belakang masalah, rumusan masalah, tujuan
BAB 2 LANDASAN TEORI
Dalam bab ini akan dijelaskan tentang teori pendukung yang digunakan untuk pembahasan dan cara kerja rangkaian.
BAB 3 PERANCANGAN DAN PEMBUATAN
Meliputi tentang perancangan rangkaian dan program yang
digunakan.
BAB 4 HASIL DAN PEMBAHASAN
Meliputi pengujian alat dan analisanya.
BAB 5 KESIMPULAN DAN SARAN
Mengenai kesimpulan yang didapat setelah membuat tugas akhir
BAB 2
LANDASAN TEORI
2.1. Water Flow Sensor YF-S201
Sensor aliran air ini terbuat dari plastik dimana didalamnya terdapat rotor dan sensor hall effect. Saat air mengalir melewati rotor, rotor akan berputar. Kecepatan putaran ini akan sesuai dengan besarnya aliran air. Sensor berbasis
L/hour), dapat digunakan dalam pengendalian aliran air pada sistem distribusi air,
sistem pendinginan berbasis air, dan aplikasi lainnya yang membutuhkan pengecekan terhadap debit air yang dialirkan.
Gambar 2.1.Water Flow Sensor YF-S201
2.1.1. Spesifikasi Sensor Flow
c. Tekanan hidrostatik / Hydrostatic Pressure: ≤ 1,75 MPa d. Catu daya antara 4,5 Volt hingga 18 Volt DC
e. Arus: 15 mA (pada Vcc = 5V)
f. Kapasitas beban: kurang dari 10 mA (pada Vcc = 5V) g. Maksimum suhu air (water temperature usage): 80°C
h. Rentang Kelembaban saat beroperasi: 35% - 90% RH (no frost) i. Duty Cycle: 50%±10%
j. Periode signal (output rise / fall time): 0.04µs / 0.18µs
k. Diameter penampang sambungan: 0,5 inch (1,25 cm) l. Amplitudo: Low ≤ 0,5V, High ≥ 4,6 Volt
m. Kekuatan elektrik (electric strength): 1250 V / menit n. Hambatan insulasi: ≥ 100 MΩ
o. Material: PVC
Prinsip kerja sensor ini adalah dengan memanfaatkan fenomena Efek Hall. Efek Hall ini didasarkan pada efek medan magnetik terhadap partikel bermuatan
yang bergerak. Ketika ada arus listrik yang mengalir pada divais Efek Hall yang ditempatkan dalam medan magnet yang arahnya tegak lurus arus listrik,
pergerakan pembawa muatan akan berbelok ke salah satu sisi dan menghasilkan medan listrik. Medan listrik terus membesar hingga gaya Lorentz yang bekerja pada partikel menjadi nol. Perbedaan potensial antara kedua sisi divais tersebut
2.2. Mikrokontroler ATMega8535
Mikrokontroler, sebagai suatu terobosan teknologi mikrokontoler dan mikrokomputer, hadir memenuhi kebutuhan pasar (market need) dan teknologi
baru. Sebagai teknologi baru, yaitu teknologi semikonduktor dengan kandungan transistor yang lebih banyak namun hanya membutuhkan ruang kecil serta dapat
diproduksi secara massal (dalam jumlah banyak) sehingga harga menjadi lebih murah (dibandingkan mikroprosesor). Sebagai kebetuhan pasar, mikrokontroler hadir untuk memenuhi selera industri dan para konsumen akan kebutuhan dan
keinginan alat-alat bantu dan mainan yang lebih canggih.
Ilustrasi yang mungkin bisa memberikan gambaran yang jelas dalam
penggunaan mikrokontroler adalah aplikasi mesin tiket dalam arena permainan yang saat ini terkenal di Indonesia. Jika kita sudah selesai bermain, maka akan diberikan suatu nilai, nilai inilah yang menentukan berapa jumlah tiket yang bisa
diperoleh dan jika dikumpulkan dapat ditukar dengan berbagai macam hadiah. Sistem tiket ini ditangani dengan mikrokontroler, karena tidak mungkin menggunakan komputer PC yang harus dipasang disamping (atau di belakang)
mesin permainan yang bersangkutan.
Selain sistem tiket, kita juga dapat menjumpai aplikasi mikrokontroler
dalam bidang pengukuran jarak jauh atau yang dikenal dengan sistem telemetri. Misalnya pengukuran disuatu tempat yang membahayakan manusia, maka akan lebih nyaman jika dipasang suatu sistem pengukuran yang bisa mengirimkan data
lewat pemancar dan diterima oleh stasiun pengamatan dari jarak yang cukup aman dari sumbernya. Sistem pengukuran jarak jauh ini jelas membutuhkan suatu
pemancar), yang semuanya itu bisa diperoleh dari mikrokontroler yang digunakan.
Tidak seperti sistem komputer, yang mampu menangani berbagai macam
program aplikasi (misalnya pengolah kata, pengolah angka dan lain sebagainya), mikrokontroler hanya bisa digunakan untuk satu aplikasi tertentu saja.Perbedaan
lainnya terletak pada perbandingan RAM dan ROM-nya. Pada sistem computer perbandingan RAM dan ROM-nya besar, artinya program-program pengguna disimpan dalam ruang RAM yang relatif besar, sedangkan rutin-rutin antarmuka
perangkat keras disimpan dalam ruang ROM yang kecil. Sedangkan pada mikrokontroler, perbandingan ROM dan RAM-nya yang besar artinya program
control disimpan dalam ROM (bisa Masked ROM atau Flash PEROM) yang ukurannya relatif lebih besar, sedangkan RAM digunakan sebagai tempat penyimpanan sementara, termasuk register-register yang digunakan pada
mikrokontroler yang bersangkutan.
Mikrokontroler ATMega8535 merupakan salah satu keluarga dari MCS-51 keluaran Atmel. Jenis Mikrokontroler ini pada prinsipnya dapat digunakan untuk
mengolah data per bit ataupun 8 bit secara bersamaan. Pada prinsipnya program pada Mikrokontroler dijalankan bertahap, jadi pada program itu sendiri terdapat
beberapa set instruksi dan tiap instriksi itu dijalankan secara bertahap atau berurutan.
Beberapa fasilitas yang dimiliki oleh Mikrokontroler ATMega8535 adalah
sebagai berikut :
a. Sebuah Central Processing Unit 8 bit.
c. RAM internal 128 byte. d. Flash Memory 2 Kbyte.
e. Lima buah jalur interupsi (dua buah interupsi eksternal dan tiga buah
interupsi internal).
f. Empat buah programmable port I/O yang masing – masing terdiri dari
delapan buah jalur I/O.
g. Sebuah port serial dengan control serial full duplex UART.
h. Kemampuan untuk melaksanakan operasi aritmatika dan operasi logika.
i. Kecepatan dalam melaksanakan instruksi per siklus 1 mikrodetik pada frekuensi 12 MHz.
2.2.1. Kontruksi ATMega8535
Mikrokontrol ATMega8535 hanya memerlukan 3 tambahan kapasitor,1
resistor dan 1 kristal serta catu daya 5 Volt. Kapasitor 10 mikro-Farad dan resistor 10 KiloOhm dipakai untuk membentuk rangkaian reset. Dengan adanya rangkaian reset ini ATMega8535 otomatis direset begitu rangkaian menerima catu daya.
Kristal dengan frekuensi maksimum 24 MHz dan kapasitor 30 piko-Farad dipakai untuk melengkapi rangkaian oscilator pembentuk clock yang menentukan
kecepatan kerja mikrokontroler. Memori merupakan bagian yang sangat penting pada mikrokontroler. Mikrokontroler memiliki dua macam memori yang sifatnya berbeda.
Read Only Memory (ROM) yang isinya tidak berubah meskipun IC
kehilangan catu daya. Sesuai dangan keperluannya, dalam susunan MCS-51
Random Access Memori (RAM) isinya akan sirna begitu IC kehilangan
catu daya, dipakai untuk menyimpan data pada saat progam bekerja. RAM yang dipakai untuk menyimpan data ini disebut sebagai memori data.
Ada berbagai jenis ROM. Untuk mikrokontroler dengan progam yang sudah baku dan diproduksi secara massal, progam diisikan ke dalam ROM pada
saat IC mikrokontroler dicetak di pabrik IC. Untuk keperluan tertentu mikrokontroler mengunakan ROM yang dapat diisi ulang atau
Programble-Eraseable ROM yang disingkat menjadi PEROM atau PROM. Dulu banyak
dipakai UV-EPROM (Ultra Violet Eraseable Progamble ROM) yang kemudian dinilai mahal dan ditinggalkan setelah ada flash PEROM yang harganya jauh lebih
murah.
Jenis memori yang dipakai untuk Memori Program ATMega8535 adalah Flash PEROM, program untuk mengendalikan mikrokontroler diisikan ke memori
itu lewat bantuan alat yang dinamakan sebagai ATMega8535 Flash PEROM
Programmer.
Memori Data yang disediakan dalam chip ATMega8535 sebesar 128 byte,
meskipun hanya kecil saja tapi untuk banyak keperluan memori kapasitas itu sudah cukup.
Sarana Input/Ouput yang disediakan cukup banyak dan bervariasa.ATMega8535 mempunyai 32 jalur Input/Ouput. Jalur Input/Ouput paralel dikenal sebagai Port 1 (P1.0..P1.7) dan Port 3 (P3.0..P3.5 dan P3.7).
ATMega8535 dilengkapi UART (Universal Asyncronous Receiver/
Transmiter) yang biasa dipakai untuk komunikasi data secara seri. Jalur untuk
P1.1 di kaki nomor 2 dan 3, sehingga kalau sarana input/ouput yang bekerja menurut fungsi waktu.Clock penggerak untaian pencacah ini bisa berasal dari
oscillator kristal atau clock yang diumpan dari luar lewat T0 dan T1. T0 dan T1
berhimpitan dengan P3.4 dan P3.5, sehingga P3.4 dan P3.5 tidak bisa dipakai untuk jalur input/ouput parelel kalau T0 dan T1 dipakai.
ATMega8535 mempunyai enam sumber pembangkit interupsi, dua diantaranya adalah sinyal interupsi yang diumpankan ke kaki INT0 dan INT1. Kedua kaki ini berhimpitan dengan P3.2 dan P3.3 sehingga tidak bisa dipakai
sebagai jalur input/output parelel kalau INT0 dan INT1 dipakai untuk menerima sinyal interupsi.
ATmega8535 merupakan tipe AVR yang telah dilengkapi dengan 8 saluran ADC internal dengan fidelitas 10 bit. Dalam mode operasinya, ADC ATmega8535 dapat dikonfigurasi, baik secara single ended input maupun
differential input. Selain itu, ADC ATmega8535 memiliki konfigurasi pewaktuan,
tegangan referensi, mode operasi dan kemampuan filter derau yang amat fleksibel, sehingga dengan mudah disesuaikan dengan kebutuhan ADC itu sendiri.
Port1 dan 2, UART, Timer 0,Timer 1 dan sarana lainnya merupakan register yang secara fisik merupakan RAM khusus, yang ditempatkan di Special
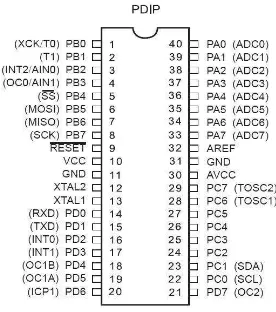
2.2.2 Pin-Pin Pada Mikrokontroler ATMega8535
Deskripsi pin-pin pada Mikrokontroler ATMega8535 :
Gambar 2.2.Konfigurasi pin IC Mikrokontroller ATMega8535
Penjelasan Pin
VCC : Tegangan Supplay (5 volt) GND : Ground
RESET : Input reset level rendah pada pin ini selama lebih dari panjang pulsaminimum akan menghasilkan reset,walaupun clock
sedangberjalan.
XTAL1 : Input penguat osilator inverting dan input pada rangkaian operasi
clock internal.
AVCC : Pin tegangan suplay untuk port A dan ADC. Pin ini harus
dihubungkan ke VCC walaupun ADC tidak digunakan, maka pin ini harus dihubungkan ke VCC melalui low pass filter.
AREF : Pin referensi tegangan analaog untuk ADC.
a. Port A (PA0-PA7)
Port A berfungsi sebagai input analog ke ADC. Port A juga dapat berfungsi sebagai port I/O 8 bit bidirectional, jika ADC tidak digunakan
maka port dapat menyediakan resistor pull-up internal (dipilih untuk setiap bit).
b. Port B (PB0-PB7)
Port B merupakan I/O 8 bit biderectional dengan resistor pull-up internal (dipilih untuk setiap bit)
c. Port C (PC0-PC7)
Port C merupakan I/O 8 bit biderectional dengan resistor pull-up internal
(dipilih untuk setiap bit) d. Port D (PD0-PD7)
Port D merupakan I/O 8 bit biderectional dengan resistor pull-up internal
(dipilih untuk setiap bit)
2.3. EEPROM ATMega8535
Mikrokontroler ATMega8535 memiliki EEPROM sebesar 2 Kbyte untuk tempat penyimpanan data dan 256 byte memori Ram. 128 byte dari memori tersebut
menempati ruang sejajar dengan register fungsi khusus. Hal ini berarti memori yang 128 byte tersebut memiliki alamat yang sama tetapi beda pada ruang yang terpisah dengan SFR.
Bila suatu perintah diperlukan menuju alamat memori dengan alamat di atas 7FH, maka diperlukan mode pengalamatan yang berbeda sehingga CPU
langsung berikut akan menuju SFR dengan alamat 0A0H, yaitu P2. Mov
0A0H,#data. Sementara perintah yang untuk menuju memori dengan alamat
0A0H dikerjakan dengan cara pengalamatan tidak langsung, memori akan dituju
buka alamat P2. Mov @R0.#data. Dalam hal ini, operasi stack adalah contoh
untuk pengalamatan tidak langsung, sehingga memori dengan alamat di atas 128
pada RAM tersedia untuk keperluan stack.
Demikian juga dengan EEPROM yang ada pada ATMega8535, data pada memori tersebut diset dengan memberikan nilai logika 1 pada bit EEMEM, yaitu
bit pada register WMCOM pada alamat SFR dengan nilai lokasi 96H. EEPROM memiliki alamat mulai dari 000H sampai dengan 7FF. Untuk mencapai data
dengan alamat tersebut di atas digunakan MOVX, sementara untuk mencapai data dengan alamat tersebut di atas digunakan perintah yang sama tetapi dengan mengatur nilai EEMEN dengan logika LOW.
Selama penulisan ke EEPROM dapat juga dilakukan pembacaan tetapi harus dimulai dari bit MSB, sekali penulisan telah selesai data yang benar telah tersimpan dengan baik pada lokasi memori EEPROM tersebut.
2.4. LCD ( Liquid Crystal Display )
LCD (Liquid Crystal Display) sering diartikan dalam bahasa indonesia sebagai tampilan kristal cair merupakan suatu jenis media tampilan yang menggunakan kristal cair sebagai penampil utama.
LCD dapat menampilkan karakter ASCI sehingga kita bisa menampilkan campuran huruf dan angka sekaligus berwarna ataupun tidak berwarna, hal ini
satu buah kristal cair sebagai sebuah titik cahaya. Walau disebut sebagai titik cahaya namun kristal cair ini tidak memancarkan cahaya sendiri. Sumber cahaya didalam sebuah perangkat LCD adalah lampu neon berwarna putih dibagian
belakang susunan kristal cair tadi. Titik cahaya yang jumlahnya puluhan ribu bahkan jutaan inilah yang membentuk tampilan citra. Kutub kristal cair yang
dilewati arus listrik akan berubah karena pengaruh polarisasi medan magnetik yang timbul dan oleh karenanya akan hanya membiarkan beberapa warna diteruskan sedangkan warna lainnya tersaring.
Dalam menampilkan karakter untuk membantu menginformasikan proses dan kontrol yang terjadi dalam suatu program robot kita sering menggunakan
LCD. Ada beberapa jenis LCD perbedaannya hanya terletak pada alamat menaruh karakternya.Salah satu LCD yang sering dipergunakan adalah LCD 16x2 artinya LCD tersebut terdiri dari 16 kolom dan 2 baris. LCD ini sering digunakan karena
harganya yang relatif murah dan pemakaiannya yang mudah. LCD yang kita gunakan masih membutuhkan agar dapat dikoneksikan dengan sistem minimum dalam suatu mikrokontroler. Driver tersebut berisi rangkaian pengaman, pengatur
tingkat kecerahan backligt maupun data serta untuk mempermudah pemasangan di mikrokontroler (portable-red).
Modul LCD memiliki karakteristik sebagai berikut:
1. Terdapat 16 x 2 karakter huruf yang bisa ditampilkan. 2. Setiap terdiri dari 5 x 7 dot-matrix cursor.
3. Terdapat 192 macam karakter.
4. Terdapat 80 x 8 bit display RAM ( maksimal 80 karakter ).
5. Memiliki kemampuan penulisan dengan 8 bit maupun dengan 4 bit. 6. Dibangun oleh osilator lokal.
7. Satu sumber tegangan 5 Volt.
8. Otomatis reset saat tegangan dihidupkan. 9. Bekerja pada suhu 0oC sampai 550C.
2.4.1. Konfigurasi Pin LCD
Tabel 2.1. Konfigurasi Pin LCD
No Simbol Level Fungsi
1 Vss - 0 Volt
2 Vcc - 5+10% Volt
3 Vee - Penggerak LCD
4 RS H/L H=Memasukkan Data,L=Memasukkan Ins
2.5 Relay
Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian
utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar atau Switch). Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan
Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi.
2.5.1 Jenis – Jenis Relay
1. Berdasarkan Cara Kerja
a. Normal terbuka. Kontak sakelar tertutup hanya jika relay dihidupkan.
b. Normal tertutup. Kontak sakelar terbuka hanya jika relay
dihidupkan.
c. Tukar-sambung. Kontak sakelar berpindah dari satu kutub ke kutub lain saat relay dihidupkan.
d. Bila arus masuk Pada gulungan, maka seketika gulungan akan berubah menjadi medan magnet. Gaya magnet inilah yang akan
menarik luas sehingga saklar akan bekerja 2. Berdasarkan Konstruksi
a. Relai menggrendel. Jenis relai yang terus bekerja walaupun sumber
b. Relai lidi. Digunakan untuk pensakelaran cepat daya rendah. Terbuat dari dua lidi tabung gelas. Kumparan dililitkan pada tabung gelas.
2.6. Pengertian Debit Air
Debit adalah suatu koefesien yang menyatakan banyaknya air yang mengalir dari suatu sumber persatuan waktu, biasanya diukur dalam satuan liter per/detik, untuk memenuhi keutuhan air pengairan, debit air harus lebih cukup untuk disalurkan ke
saluran yang telah disiapkan. Ada juga yang mengartikan debit adalah satuan besaran air yang keluar dari Daerah Aliran Sungai (DAS). Satuan debit yang
digunakan dalam system satuan SI adalah meter kubik per detik (m3/s).
Istilah debit biasanya berkaitan dengan air, aliran dan sungai. Debit air adalah ukuran banyaknya volume air yang dapat lewat dalam suatu tempat atau
yang dapat di tampung dalam sutau tempat tiap satu satuan waktu. Debit aliran adalah jumlah air yang mengalir dalam satuan volume per waktu. Debit air sungai adalah tinggi permukaan air sungai yang terukur oleh alat ukur permukaan air
sungai. Dari beberapa pengertian diatas sebenarnya membahas satu hal yang sama yaitu jumlah air yang ditampung.
Selain debit air, debit aliran dan debit air sungai terdapat juga debit yang diberi nama debit andalan. Debit andalan adalah debit maksimum yang dapat digunakan untuk irigasi. Penghitungan debit andalan bertujuan agar dapat
terlebih dahulu, karena debit air berkaitan dengan satuan volume dan satuan waktu.
Tabel 2.2 Konversi Volume dan Waktu Untuk Dapat Mengetahui Debit Air
Satuan Waktu Satuan Volume
1 Jam = 60 Detik
1 Liter = 1 dm3 =1.000cm3=1.000.000 mm3= 0,001m3
1 Menit = 60 Detik 1cc = 1mL = 1 cm3
1 Jam = 3.600 Detik
1 Menit = 1/60 Jam
1 Jam = 1/3.600 Detik
Debit air dapat dihitung dengan menggunakan rumus sebagai berikut:
Q = V / T ……… (I) Dimana :
Q : Debit (liter/s) V : Volume (liter)
T : Waktu (s)
Fungsi dari pengukuran debit aliran adalah untuk mengetahui seberapa banyak air yang mengalir pada suatu sungai dan seberapa cepat air tersebut
mengalir dalam waktu satu detik. Aliran air, dibedakan menjadi dua yaitu: aliran laminar dan aliran turbulen. Aliran laminar adalah aliran fluida yang bergerak
tidak berpotongan satu sama lain. Sedangkan aliran turbulen adalah aliran fluida yang partikel-partikelnya bergerak secara acak dan tidak stabil dengan kecepatan berfluktuasi yang saling interaksi. Cara mengetahui aliarn tersebut laminar atau
turbulen yaitu dengan melihat bagaimana air tersebut mengalir apakah dia membentuk benang atau membentuk gelombang. Debit aliran dapa dipengaruhi
BAB 3
PERANCANGAN DAN PEMBUATAN
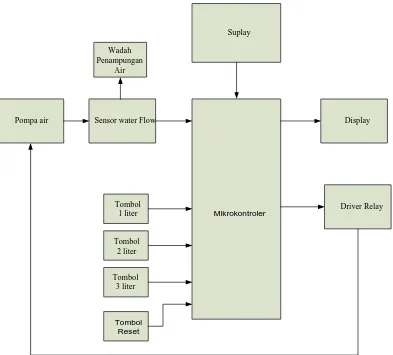
3.1. Diagram Blok Rangkaian
Mikrokontroler
Suplay
Sensor water Flow
Pompa air Display
Driver Relay
Tombol Reset
Tombol 1 liter
Tombol 2 liter
Tombol 3 liter Wadah Penampungan
Air
Gambar 3.1.Diagram Blok Sistem
3.1.1. Fungsi Tiap Blok
1. Blok mikrokontroller : Mengkonversi data dari sensor ke
LCD
pulsa ke mikrokontroler
3. Blok Pompa air : Sebagai Pompa, untuk mengalirkan air ke Sensor
4. Blok Wadah Penampungan Air : Berfungsi sebagai tempat
penampungan air yang keluar dari
water flow sensor.
5. Blok Display : Sebagai output tampilan dari Sensor 6. Blok power supply : Sebagai penyedia tegangan ke
sistem dan Sensor
7. Blok Relay : Sebagai saklar untuk menghidupkan
dan mematikan pompa apabila inputan = output kecepatan kendaraan melebihi batas
8. Blok tombol 1 liter : Sebagai inputan 1 liter aliran air yang akan di pompa
9. Blok tombol 2 liter : Sebagai inputan 2 liter aliran air
yang akan di pompa
10.Blok tombol 3 liter : Sebagai inputan 3 liter aliran air
yang akan di pompa
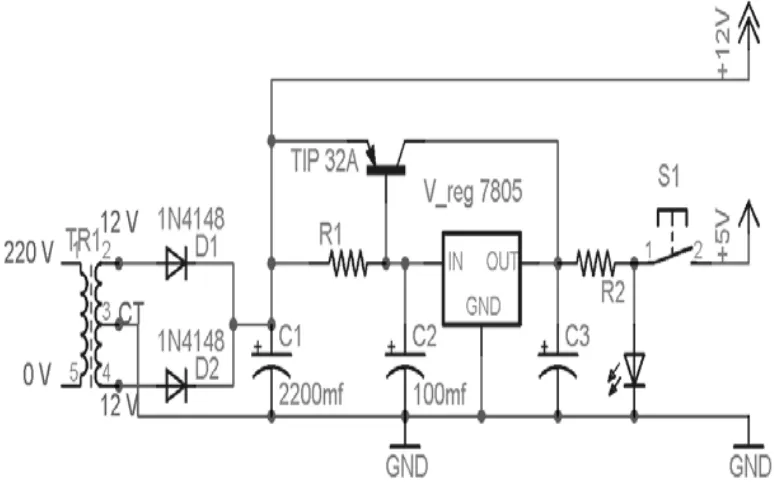
3.2. Rangkaian Power Supplay Adaptor ( PSA )
Rangkaian ini berfungsi untuk memberikan supply tegangan ke seluruh rangkaian yang ada. Rangkaian PSA yang dibuat terdiri dari dua keluaran, yaitu 5 volt dan
12 volt, keluaran 5 volt digunakan untuk mensupplay tegangan ke seluruh rangkaian, sedangkan keluaran 12 volt digunakan untuk mensuplay tegangan ke
relay. Rangkaian power supplay ditunjukkan pada gambar 3.2 berikut ini :
Gambar 3.2.Rangkaian Power Supplay Adaptor (PSA)
Trafo CT merupakan trafo stepdown yang berfungsi untuk menurunkan tegangan dari 220 volt AC menjadi 12 volt AC. Kemudian 12 volt AC akan disearahkan dengan menggunakan dua buah dioda, selanjutnya 12 volt DC akan
diratakan oleh kapasitor 2200 μF. Regulator tegangan 5 volt (LM7805CT)
digunakan agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan
kekurangan arus pada rangkaian, sehingga regulator tegangan (LM7805CT) tidak akan panas ketika rangkaian butuh arus yang cukup besar. Tegangan 12 volt DC langsung diambil dari keluaran 2 buah dioda penyearah.
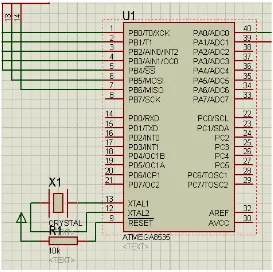
3.3. Rangkaian Mikrokontroller ATMega8535
Rangkaian sistem minimum mikrokontroler ATMega8535 dapat dilihat pada gambar 3.3 di bawah ini :
Gambar 3.3.Rangkaian sistem minimum mikrokontroler ATMega8535
Dari Gambar 3.3, Rangkaian tersebut berfungsi sebagai pusat kendali dari
seluruh sistem yang ada. Komponen utama dari rangkaian ini adalah IC Mikrokontroler ATMega8535. Semua program diisikan pada memori dari IC ini
Pin 12 dan 13 dihubungkan ke XTAL 8 MHz dan dua buah kapasitor 30 pF. XTAL ini akan mempengaruhi kecepatan mikrokontroler ATMega8535 dalam mengeksekusi setiap perintah dalam program. Pin 9 merupakan masukan reset
(aktif rendah). Pulsa transisi dari tinggi ke rendah akan me-reset mikrokontroler ini.
Untuk men-download file heksadesimal ke mikrokontroler, Mosi, Miso, Sck, Reset, Vcc dan Gnd dari kaki mikrokontroler dihubungkan ke Jack 10 Pin header sebagai konektor yang akan dihubungkan ke ISP Programmer. Dari ISP
Programmer inilah dihubungkan ke komputer melalui port paralel.
Kaki Mosi, Miso, Sck, Reset, Vcc dan Gnd pada mikrokontroler terletak
pada kaki 6, 7, 8, 9, 10 dan 11. Apabila terjadi keterbalikan pemasangan jalur ke ISP Programmer, maka pemograman mikrokontroler tidak dapat dilakukan karena mikrokontroler tidak akan bisa merespon.
3.4. Perancangan Rangkaian LCD (Liquid Crystal Display)
Pada alat ini, display yang digunakan adalah LCD (Liquid Crystal Display) 16x2.
Untuk blok ini tidak ada komponen tambahan karena mikrokontroler dapat memberi data langsung ke LCD, pada LCD Hitachi - M1632 sudah terdapat
driver untuk mengubah data ASCII output mikrokontroler menjadi tampilan
karakter. Pemasangan potensio sebesar 5 KΩ untuk mengatur kontras karakter
yang tampil. Gambar 3.4 berikut merupakan gambar rangkaian LCD yang
Gambar 3.4.Rangkaian LCD
Dari Gambar 3.4, rangkaian ini terhubung ke PC.0... PC.6, yang merupakan pin I/O dua arah dan pin fungsi khusus, yaitu sebagai komunikan two slave dan SPI mempunyai fungsi khusus sebagai pengiriman data secara serial.
Sehingga nilai yang akan tampil pada LCD display akan dapat dikendalikan oleh Mikrokontroller ATMega8535.
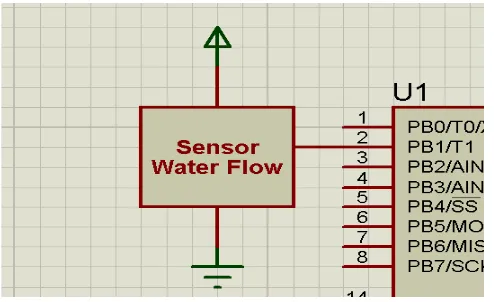
3.5. Perancangan sensor Water Flow
Gambar 3.5. Rangkaian sensor water flow
Pada rangkaian ini sensor terhubung ke PORTB.1, yaitu sebagai counter, sensor water flow akan menghasilakan pulsa apabila di aliri cairan, setiap pulsa
Water flow sensor ini terdiri atas katup plastik, rotor air, dan sebuah sensor hall-effect.Prinsip kerja sensor ini adalah dengan memanfaatkan fenomena efek Hall. Efek Hall ini didasarkan pada efek medan magnetik terhadap partikel
bermuatan yang bergerak. Ketika ada arus listrik yang mengalir pada divais efek Hall yang ditempatkan dalam medan magnet yang arahnya tegak lurus arus listrik,
pergerakan pembawa muatan akan berbelok ke salah satu sisi dan menghasilkan medan listrik. Medan listrik terus membesar hingga gaya Lorentz yang bekerja pada partikel menjadi nol. Perbedaan potensial antara kedua sisi divais tersebut
disebut potensial Hall. Potensial Hall ini sebanding dengan medan magnet dan arus listrik yang melalui divais.
3.6. Perancangan Relay dan Pompa
Gambar 3.6. Relay dan Pompa
Relay merupakan salah satu komponen elektronik yang terdiri dari lempengan logam sebagai saklar dan kumparan yang berfungsi untuk menghasilkan medan magnet. Pada rangkaian ini digunakan relay 12 volt, ini
berarti jika positif relay (kaki 1) dihubungkan ke sumber tegangan 12 volt dan negative relay (kaki 2) dihubungkan ke ground, maka kumparan akan
menghasilkan medan magnet, dimana medan magnet ini akan menarik logam yang mengakibatkan saklar terhubung.
Pada rangkaian ini untuk mengaktifkan atau menon-aktifkan relay
digunakan transistor type PNP. Dari Gambar 3.6 dapat dilihat bahwa negative relay dihubungkan ke kolektor akan terhubung ke emitor dimana emitor langsung
terrhubung ke ground yang menyebabkan tegangan di kolektor menjadi 0 volt, keadaan ini akan mwngakibatkan relay aktif. Sebaliknya jika transistor tidakaktif, maka kolektor tidak terhubung ke emitor, sehingga tegangan pada kolektor
menjadi 9 volt, keadaan ini menyebabkan tidak aktif. Kumparan pada relay akan menghasilkam tegangan singkat yang besar ketika relay dinon-aktifkan dan ini dapat merusak transistor yang ada pada rangkaian ini. Untuk mencegah kerusakan
pada transistor tersebut sebuah dioda harus dihubungkan ke relay tersebut .Dioda dihubungkan secara terbalik sehingga secara normal dioda ini tidak
menghantarkan. Penghantaran hanya terjadi ketika relay dinonaktifkan, pada saat ini arus akan terus mengalir melalui kumparan dan arus ini akan dialirkan ke dioda. Tanpa adanya dioda arus sesaat yang besar itu akan mengalir ke transistor,
3.7. Flowchart Sistem
Start
Selesai Inisialising
Apakah
input = output? Pilih tombol inputan
liter
Tampil LCD
Pompa aktif
Konversi Pulsa menjadi liter
Hitung Pulsa ke liter
tidak
Pompa mati Menerima aliran ke
sensor
BAB 4
HASIL DAN PEMBAHASAN
4.1. Pengujian Rangkaian regulator
Pengujian rangkaian regulator ini bertujuan untuk mengetahui tegangan yang
dikeluarkan oleh rangkaian tersebut, dengan mengukur tegangan keluaran dari output regulator 7805 menggunakan multimeter digital. Setelah dilakukan pengukuran maka diperoleh besarnya tegangan keluaran sebesar 5 volt. Dengan
begitu dapat dipastikan apakah terjadi kesalahan terhadap rangkaian atau tidak.
Gambar 4.1. Gambar Tegangan Output Ic Regulator 7805
Pada pump menggunakan 12 volt, jadi pada pump air ini tidak perlu
menggunakan ic regulator karena output dari adaptor sudah 12 volt DC.
4.2. Pengujian IC Mikrokontroler ATMega8535
Tabel 4.1. Pengukuran Pin IC mikrokontroler ATMega8535
No Pin Tegangan keluaran
1 0,0
2 0,0
4 0,0
5 0,0
6 0,0
7 0,0
8 0,0
9 3,97
10 3,97
11 0,0
12 0,78
13 0,86
14 0,0
15 0,0
16 0,0
17 0,0
18 3,95
19 3,95
20 3,95
21 3,94
22 3,96
23 3,96
24 0,0
25 3,96
27 0,01
28 0,01
29 0,0
30 4,95
31 0,0
32 4,95
33 1,76
34 1,79
35 1,78
36 1,73
37 1,77
38 1,77
39 1,81
40 4,91
Tabel diatas merupakan hasil pengukuran pada IC mikrokontroler ATMega8535, pengukuran dilakukan dengan tujuan untuk mengetahui apakah mikrokontroler bekerja dengan baik atau tidak yaitu dengan membandingkan
tegangan terukur dengan program maupun data sheet.
4.3. Pengujian Display LCD
Rangkaian LCD dihubungkan ke PB.0….PB7, yang merupakan pin I/O dua arah dan pin fungsi khusus, yaitu sebagai Timer, yaitu sebagai timer/counter,
secara serial. Sehingga nilai yang akan tampil pada LCD display akan dapat di kendalikan oleh Mikrokontroller ATMega8535.
Pada bagian ini, mikrokontroller dapat member data langsung ke LCD.
Pada LCD Hitachi- M11632 sudah terdapat driver untk mengubah ASCII output mikrokontroller menjadi tampilan karakter.
Tabel 4.2. Pengukuran pin IC LCD
No Pin Tegangan keluaran
1 0,0
2 4,95
3 1,39
4 3,96
5 3,96
6 0,0
7 4,93
8 4,93
9 4,93
10 4,93
11 0,0
12 3,96
13 3,96
14 0,0
15 4,95
Tabel diatas merupakan hasil pengukuran pada Display LCD, pengukurann dilakukan dengan tujuan untuk mengetahui apakah LCD bekerja dengan baik atau tidak yaitu dengan membandingkan tegangan terukur dengan
program maupun data sheet.
4.4. Pengujian Rangkaian Relay
Untuk pengujian relay, yaitu diberikan tegangan 5V basis transistor C945, maka relay akan aktif, dan pompa air hidup. Hal ini disebabkan karena kumparan pada
relay dialiri arus listrik. Dengan demikian, kontak akan terhubung. Dioda berfungsi sebagai komponen pengaman transistor arus balik yang mungkin timbul
akibat dari aktifnya kumparan relay.
Ketika berlogika 0 (0 Volt), maka transistor dalam keadaan tidak aktif, dan kumparan relay tidak dialiri arus listrik. Hal ini akan menyebabkan kontak tidak
terhubung. Pengujian di lakuakn bertujauan untuk mengetahui rangkaian benar atau salah, dan komponen atau relay masih dapat di gunakan atau tidak, setelah di lakukan pengujian semua komponen dapat bekerja dengan baik.
4.5. Pengujian Rangkaian Water Flow Sensor
Pengujian rangkaian water flow sensor ini yaitu sensor akan
menghasilkan pulsa setiap aliran yang di lewati sensor. Setip pulsa akan di
kalibrasi dengan dalam satuan liter, setelah diuji pada sensor saya ini untuk
mendapatkan pulsa dalam 1 liter, yaitu sensor menghasilkan pulsa sebanyak 514
pulsa, untuk mengkalibrasi dalam satuan liter, setiap pulsa di bagi dengan 514,
Tabel 4.3. Tabel Pengujian Pulsa Water Flow Sensor
Water flow sensor ini terdiri atas katup plastik, rotor air, dan sebuah sensor hall-effect. Ketika air mengalir melalui pipa dalam sensor ini, maka akan mengenai
rotor, dan membuatnya berputar. Kecepatan putar rotor akan berubah ketika kecepatan aliran air berubah pula. Output dari sensor hall-effect akan sebanding
dengan pulsa yang digenerate rotor. Pulsa ini akan di hubungkan ke counter pada mikrokontroler dengan 514 counter = 1 liter. Untuk mendapatkan perliter, setiap counter di bagi dengan 514.
Gambar 4.2. Grafik Pulsa Sensor Terhadap Volume Air
0
Dari grafik perbandingan antara pulsa terhadap volume air, dapat disimpulkan bahwa pulsa keluaran dari sensor berbanding lurus terhadap volume
air. Dengan katalain semakin besar pulsa yang dihasilkan, semakin besar juga volume air yang dialirkan. Demikian juga terhadap volume airnya. Semakin
banyak volume airnya, maka semakin besar juga pulsa yang dihasilkan oleh sensornya.
4.6. Pengujian Alat
Pengujian ini dilakukan untuk mengukur unjuk kerja sistem dalam pengukuran laju aliran fluida. Pengujian dilakukan dengan mengalirkan air melalui water flow
sensor YF-S201 dan selanjutnya ditampung dengan gelas ukur. Dengan asumsi
bahwa laju aliran air oleh pompa dianggap konstan, maka referensi pengukuran laju aliran adalah volume air terukur pada gelas ukur dibagi dengan waktu yang
diperlukan. Ketidak-pastian pengukuran volumetrik dan pengukuran waktu dianggap tidak signifikan dibanding ketidak-pastian alat ukur yang dibuat sehingga dapat diabaikan. Kedua asumsi ini diambil karenaterkadang terjadi eror
pada chip mikrokontroler, sehingga dalam pembacaan program yangdimasukkan terjadi kesalahan. Namun hingga Tugas Akhir ini diselesaikan, perangkat ini
Tabel 4.4.Tabel Pengukuran Waktu Aliran Air
4.7. Analisis Data Pengukuran Debit Air
Debit air adalah kecepatan aliran zat cait per satuan waktu. Untuk dapat menentukan debit air maka kita harus mengetahui satuan ukuran volume dan
satuan ukuran waktu terlebih dahulu, karena debit air berkaitan erat dengan satuan volume dan satuan waktu.
Debit (Q) = Volume (V) / Waktu (T) ………. I
Dari Tabel 4.4 dapat ditentukan debit dari tiap pengukuran dan debit rata-rata
antara lain :
1. Untuk volume 1 liter
Pengukuran Pertama
�1 =
1 �����
Pengukuran Kedua
Gambar 4.3. Grafik Pengukuran Debit Dalam 1 Liter
2. Untuk volume 2 liter
Gambar 4.4. Grafik Pengukuran Debit Dalam 2 Liter
3. Untuk volume 3 liter
Pengukuran Pertama
Gambar 4.5. Grafik Pengukuran Debit Dalam 3 Liter
Debit rata-rata dari pengukuran antara lain :
Dari perhitungan yang dilakukan, maka debit air yang didapat tiap pengukuran ditunjukan pada Tabel 4.5 dibawah ini :
Tabel 4.5. Tabel Pengukuran Debit Air
Volume
BAB 5
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Dari evaluasi hasil kerja alat dapat diambil beberapa kesimpulan dalam tugas proyek ini :
1. Water flow yang digunakan adalah tipe YF-S201 berfungsi sebagai
sensor hall effect untuk pengukuran aliran air dengan keluaran dari sensor ialah berupa pulsa.
2. Dari pengukuran yang dilakukan, debit rata-rata yang dihasilkan oleh Water Flow sensor YF-S201 ialah 0,0473 liter/sekon.
3. Mikrokontroller ATMega8535 dapat digunakan untuk memproses data
dari Water Flow sensor YF-S201 dan akan ditampilkan ke Display LCD.
5.2. Saran
Setelah melakukan penulisan ini diperoleh beberapa hal yang dapat dijadikan saran untuk dapat dilakukan perancangan lebih lanjut, yaitu :
1. Diperlukan rancangan yang lebih teliti lagi pada alat agar rangkaian ini dapat bekerja lebih sempurna.
DAFTAR PUSTAKA
Bejo, Agus. C & AVR Rahasia Kemudahan Bahasa C Dalam Mikrokontroler
ATMega8 dan ATMega8535, Yogyakarta : Graha Ilmu, 2008
Daryanto, Drs. 2008. Pengetahuan Teknik Elektronika. Jakarta : Bumi aksara Setiawan,Afrie.2006. 20 aplikasi mikrokontroller ATMEGA8535 &
ATMEGA 16 menggunakan BASCOM -AVR .Yogyakarta: ANDI
FlowmeterTutorial, http://www.omega.com/techref/pdf/FlowMeterTutorial.pdf
Heryanto, M.Ary dan Wisnu Adi.2008.Pemrograman Untuk Mikrokontroler
ATMEGA 8535.Yogyakarta: ANDI.
Lingga, W. 2006.Belajar sendiri Pemrograman AVR ATMega8535. Yogyakarta: Andi Offset.
William.D.Cooper. Terjemahan Pakpahan.Teknik Instrumentasi dan
Elektronika.Erlangga. Jakarta. 1996
di akses bulan Mei 2015
diakses bulan Juni 2015
PROGRAM LENGKAP
/******************************************************
*
This program was created by the
CodeWizardAVR V3.12 Advanced
Automatic Program Generator
© Copyright 1998-2014 Pavel Haiduc, HP InfoTech s.r.l.
http://www.hpinfotech.com
AVR Core Clock frequency: 8.000000 MHz
#define reset PIND.7
#define t1 PIND.4
#define t2 PIND.5
#define t3 PIND.6
#define pump PORTD.3
// Alphanumeric LCD functions
#include <alcd.h>
unsigned char temp[8];
int data,set1=0, set2=0, set3=0, state=0, loop, waktu;
float liter=0;
char buff[8];
// Declare your global variables here
void main(void)
{
// Declare your local variables here
// Input/Output Ports initialization
// Port A initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=Out
Bit2=In Bit1=In Bit0=In
DDRA=(0<<DDA7) | (0<<DDA6) | (0<<DDA5) | (0<<DDA4) |
(1<<DDA3) | (0<<DDA2) | (0<<DDA1) | (0<<DDA0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=0 Bit2=P
Bit1=P Bit0=P
PORTA=(0<<PORTA7) | (0<<PORTA6) | (0<<PORTA5) |
(0<<PORTA4) | (0<<PORTA3) | (1<<PORTA2) | (1<<PORTA1) |
(1<<PORTA0);
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In
Bit2=In Bit1=In Bit0=In
DDRB=(0<<DDB7) | (0<<DDB6) | (0<<DDB5) | (0<<DDB4) |
(0<<DDB3) | (0<<DDB2) | (0<<DDB1) | (0<<DDB0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T
Bit1=T Bit0=T
PORTB=(0<<PORTB7) | (0<<PORTB6) | (0<<PORTB5) |
(0<<PORTB4) | (0<<PORTB3) | (0<<PORTB2) | (0<<PORTB1) |
(0<<PORTB0);
// Port C initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In
Bit2=In Bit1=In Bit0=In
DDRC=(0<<DDC7) | (0<<DDC6) | (0<<DDC5) | (0<<DDC4) |
(1<<DDC3) | (0<<DDC2) | (0<<DDC1) | (0<<DDC0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T
Bit1=T Bit0=T
PORTC=(1<<PORTC7) | (1<<PORTC6) | (1<<PORTC5) |
(1<<PORTC4) | (0<<PORTC3) | (0<<PORTC2) | (0<<PORTC1) |
(0<<PORTC0);
// Port D initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In
Bit2=In Bit1=In Bit0=In
DDRD=(0<<DDD7) | (0<<DDD6) | (0<<DDD5) | (0<<DDD4) |
(1<<DDD3) | (0<<DDD2) | (0<<DDD1) | (0<<DDD0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T
Bit1=T Bit0=T
PORTD=(1<<PORTD7) | (1<<PORTD6) | (1<<PORTD5) |
(1<<PORTD4) | (0<<PORTD3) | (0<<PORTD2) | (0<<PORTD1) |
(0<<PORTD0);
// Clock source: System Clock
// Clock value: Timer 0 Stopped
// Mode: Normal top=0xFF
// OC0 output: Disconnected
TCCR0=(0<<WGM00) | (0<<COM01) | (0<<COM00) | (0<<WGM01)
| (0<<CS02) | (0<<CS01) | (0<<CS00);
TCNT0=0x00;
OCR0=0x00;
// Timer/Counter 1 initialization
// Clock source: T1 pin Falling Edge
// Mode: Normal top=0xFFFF
// OC1A output: Disconnected
// OC1B output: Disconnected
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer1 Overflow Interrupt: Off
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
TCCR1A=(0<<COM1A1) | (0<<COM1A0) | (0<<COM1B1) |
(0<<COM1B0) | (0<<WGM11) | (0<<WGM10);
TCCR1B=(0<<ICNC1) | (0<<ICES1) | (0<<WGM13) |
(0<<WGM12) | (1<<CS12) | (1<<CS11) | (0<<CS10);
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: Timer2 Stopped
// Mode: Normal top=0xFF
// OC2 output: Disconnected
ASSR=0<<AS2;
TCCR2=(0<<WGM20) | (0<<COM21) | (0<<COM20) | (0<<WGM21)
| (0<<CS22) | (0<<CS21) | (0<<CS20);
TCNT2=0x00;
OCR2=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=(0<<OCIE2) | (0<<TOIE2) | (0<<TICIE1) |
(0<<OCIE1A) | (0<<OCIE1B) | (0<<TOIE1) | (0<<OCIE0) |
(0<<TOIE0);
// External Interrupt(s) initialization
// INT0: Off
// INT1: Off
// INT2: Off
MCUCR=(0<<ISC11) | (0<<ISC10) | (0<<ISC01) |
(0<<ISC00);
MCUCSR=(0<<ISC2);
// USART initialization
// USART disabled
UCSRB=(0<<RXCIE) | (0<<TXCIE) | (0<<UDRIE) | (0<<RXEN)
| (0<<TXEN) | (0<<UCSZ2) | (0<<RXB8) | (0<<TXB8);
// Analog Comparator initialization
// Analog Comparator: Off
// The Analog Comparator's positive input is
// The Analog Comparator's negative input is
// connected to the AIN1 pin
ACSR=(1<<ACD) | (0<<ACBG) | (0<<ACO) | (0<<ACI) |
(0<<ACIE) | (0<<ACIC) | (0<<ACIS1) | (0<<ACIS0);
SFIOR=(0<<ACME);
// ADC initialization
// ADC disabled
ADCSRA=(0<<ADEN) | (0<<ADSC) | (0<<ADATE) | (0<<ADIF) |
(0<<ADIE) | (0<<ADPS2) | (0<<ADPS1) | (0<<ADPS0);
// SPI initialization
// SPI disabled
SPCR=(0<<SPIE) | (0<<SPE) | (0<<DORD) | (0<<MSTR) |
(0<<CPOL) | (0<<CPHA) | (0<<SPR1) | (0<<SPR0);
// TWI initialization
// TWI disabled
TWCR=(0<<TWEA) | (0<<TWSTA) | (0<<TWSTO) | (0<<TWEN) |
(0<<TWIE);
// Alphanumeric LCD initialization
// Connections are specified in the
lcd_init(16);
liter=data*0.0019455;//0.0019455=1/514;
{
liter=data*0.0019455;//0.0019455=1/514;
ftoa(liter,2,temp);
if (liter>=1)
{
liter=1;
liter=data*0.0019455;//0.0019455=1/514;
RANGKAIAN LENGKAP