iii
HALAMAN PERNYATAAN
Yang bertanda tangan dibawah ini:
Nama : Feri Moch. Suandi
Nim : 10809008
Menyatakan bahwa Tugas Akhir ini adalah hasil karya sendiri dan bukan merupakan duplikasi sebagian atau seluruhnya dari hasil karya orang lain yang pernah dipublikasikan atau yang sudah pernah dipakai untuk mendapatkan gelar di Universitas lain, kecuali pada bagian dimana sumber informasi dicantumkan dengan cara referensi yang semestinya.
Pernyataan ini dibuat dengan sebenar-benarnya secara sadar dan bertanggung jawab dan saya bersedia menerima sanksi berupa pembatalan Tugas Akhir saya apabila terbukti melakukan duplikasi terhadap Tugas Akhir yang sudah ada.
Bandung, Februari 2013
DAFTAR RIWAYAT HIDUP
DATA PRIBADI
Nama Lengkap : Feri Moch. Suandi Tempat, Tanggal Lahir : Cianjur, 24 Agustus 1990
Agama : Islam
Jenis Kelamin : Laki - laki Kewarganegaraan : Indonesia
Alamat : Kp. Karamat RT/RW 01/09 Desa Sukamulya Kecamatan Cugenang Kabupaten Cianjur 43252 No. Telepon : 087725501857
DATA PENDIDIKAN
RANCANG BANGUN PENENTU ARAH KIBLAT PORTABLE
BERBASIS MIKROKONTROLER
TUGAS AKHIR
Disusun untuk memenuhi syarat kelulusan pada Program Studi Diploma Tiga Teknik Komputer
Oleh
Feri Moch. Suandi
(10809008)
Pembimbing
Hidayat, M.T.
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
iv
KATA PENGANTAR
Segala puji bagi Allah SWT., Pencipta dan Pemelihara alam semesta, shalawat serta salam semoga terlimpah bagi Muhammad SAW., keluarga dan para pengikutnya yang setia hingga akhir masa.
Atas rahmat Allah SWT., akhirnya Penulis dapat menyelesaikan Tugas Akhir ini, meskipun proses belajar sesungguhnya tak akan pernah berhenti. Tugas Akhir ini sesungguhnya bukanlah sebuah kerja individual dan akan sulit terlaksana tanpa bantuan banyak pihak yang tak mungkin Penulis sebutkan satu persatu, namun dengan segala kerendahan hati, Penulis mengucapkan terima kasih kepada seleruh Dosen Teknik Komputer selama melaksanakan studi dan menyelesaikan Tugas Akhir ini.
Penyusunan Tugas Akhir ini tidak terlepas dari bantuan berbagai pihak sehingga pada kesempatan ini penulis ingin mengucapkan terimakasih kepada:
1. Ibu, Bapak, Teteh, Ade dan seluruh keluarga yang sudah memberikan dukungan dengan sabar, baik dengan do’a maupun ikhtiar. Semoga Allah
SWT., memberikan kemuliaan kepada semuanya di dunia dan kelak di akhirat, aamiin.
2. Bapak Wendi Zarman, M.Si., selaku Ketua Jurusan Teknik Komputer.
3. Bapak Hidayat, M.T., selaku pembimbing yang telah banyak memberikan arahan, saran dan bimbingan kepada Penulis.
4. Bapak Agus Mulyana, M.T., selaku dosen wali yang telah memberikan bimbingan dan bantuan dalam proses belajar dari awal kuliah.
5. Bapak dan Ibu Dosen di Jurusan Teknik Komputer Universitas Komputer Indonesia, yang telah banyak memberikan ilmu, wawasan motivasi serta bimbingannya, baik secara akademik maupun non akademik.
v
7. Teman-teman seperjuangan di Jurusan Teknik Komputer, kelas 09 TK 4 terima kasih atas kebersamaannya, semoga kita dapat menjaga tali silaturahmi yang telah terjalin ini.
8. Teman-teman asisten LAB. Elektronika terimakasih atas segala bantuannya, terutama diskusi dan peminjaman alatnya.
9. Teman-teman di Kubang selatan no. 124 Bandung.
10.Semua orang yang telah membantu Penulis dalam mengerjakan tugas akhir ini yang tidak bisa disebutkan satu persatu.
Akhirnya, Penulis berharap semoga penelitian ini menjadi sumbangsih yang bermanfaat bagi ilmu pengetahuan dan teknologi di Indonesia, khususnya disiplin keilmuan yang Penulis dalami.
Bandung, Februari 2013
vii
DAFTAR ISI
LEMBAR PENGESAHAN ... ii
HALAMAN PERNYATAAN ... iii
KATA PENGANTAR ... iv
ABSTRAK ... vi
DAFTAR ISI ... vii
DAFTAR GAMBAR ...x
DAFTAR TABEL ... xi
BAB I PENDAHULUAN ...1
1.1 Latar Belakang ...1
1.2 Maksud dan Tujuan ...1
1.3 Rumusan Masalah ...2
1.4 Batasan Masalah ...2
1.5 Sistematika Penulisan ...2
BAB II TINJAUAN PUSTAKA...4
2.1 Arah Kiblat ...4
2.1.1 Hukum Arah Kiblat ...4
2.1.2 Pengukuran Arah Kiblat Dengan Cara Tradisional ...5
2.1.3 Pengukuran Arah Kiblat Dengan Cara Modern ...7
2.2 Trigonometri ...8
2.3 GPS ...9
2.3.1 Penentuan Posisi dengan GPS...10
2.3.2 Segmen Sistem GPS...11
2.3.3 Protokol NMEA 0183 ...11
viii
2.4 Kompas Dan Sensor Kompas ...13
2.5 Mikrokontroler Basic Stamp BS240 ...16
2.6 Motor Servo ...17
2.7 LCD ...18
2.7.1 Fitur dan Konfigurasi Pin LCD ...18
2.7.2 Cara kerja LCD secara umum ...19
BAB III PERANCANGAN SISTEM ...21
3.3.1 Algoritma pengolahan data GPS ...28
3.3.2 Algoritma Pengolahan data kompas digital ...30
3.3.3 Algoritma pengiriman data ke aktuator ...31
BAB IV PENGUJIAN DAN ANALISA ...33
4.1 Tujuan Pengujian ...33
4.2 Pengujian Perangkat Keras ...33
4.2.1 Pengujian GPS ...33
ix
4.2.3 Pengujian Alat Terintegrasi ...34
4.3 Analisa ...35
4.3.1 Analisa data sensor...35
4.3.2 Analisa Data Pengujian Alat terintegrasi ...36
4.3.3 Analisa perhitungan sudut arah kiblat ...36
BAB V KESIMPULAN DAN SARAN...39
5.1 Kesimpulan ...39
5.2 Saran...39
40
DAFTAR PUSTAKA
[1] El-Moeid, I. Z. (2009). Menghitung Arah Kiblat dan Menentukannya.
Diakses tanggal 13 Maret 2012, dari Hisab dan Falak:
http://moeidzahid.site90.net/
[2] Fraden, J. (2004). Handbook of Modern Sensors. New York: Springer.
[3] Krismanto, A. (2008). Pembelajaran Trigonometri SMA. Yogyakarta: Pusat
Pengembangan dan Pemberdayaan Pendidik dan Tenaga Kependidikan
Matematika.
[4] Parallax Inc. (2004). What’s a Microcontroller: Student Guide. Parallax.Inc.
[5] PT. Telkom Indonesia. (2004). GPS : Satelit Penentu Posisi Di Belahan
Bumi. Diakses tanggal 21 Maret 2012, dari Telkom RDC Media:
http://www.telkomrdc-media.com/index.php?ch=8&lang=&s=13bcd64d48bb98570fea194626ab84
bd&n=247
[6] RobotIndonesia.Com. (2006). Jenis-Jenis Motor. Diakses tanggal 22 Maret
2012, dari Delta Robotics Division:
http://www.robotindonesia.com/articles.php
[7] Sadeli, Z. (2009). Menentukan Arah Kiblat. Diakses tanggal 12 Maret 2012,
dari Multiply: http://zanikhan.multiply.com/journal/item/4944
SiRF Technology, Inc. (2008). NMEA Reference Manual. California: SiRF
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Bagi seorang muslim, penting sekali untuk mengetahui arah kiblat. Masalah
penentuan arah kiblat dalam pelaksanaan shalat sekarang ini masih memerlukan
perhatian serius, tidak hanya oleh ulama, pemuka masyarakat, pemerintah, tetapi
juga oleh masyarakat muslim pada umumnya. Saat ini, banyak dari umat islam
Indonesia berpatokan pada arah tenggelamnya matahari atau arah barat dalam
menentukan arah kibat. Selain itu, sebagian besar alat yang digunakan dalam
menentukan arah kiblat masih bertumpu pada banyaknya database posisi garis
lintang dan garis bujur sehingga tidak bisa diaplikasikan untuk lokasi-lokasi di
luar database.
Ketika sedang bepergian jauh, tidak mengetahui arah mata angin, jalanan
sepi, tidak ada mushola atau mesjid serta ketika berada dalam perjalanan laut akan
sulit sekali untuk mengetahui arah kiblat.
Pembuatan alat penentu arah kiblat portable berbasis mikrokontroler akan
menjadi solusi dalam menentukan arah kiblat dan mengetahui arah mata angin.
Permasalahan yang akan dibahas dalam pembuatan alat ini adalah penentuan arah
kiblat serta deteksi arah mata angin berdasarkan sensor kompas dan Global
Positioning System (GPS) yang kemudian datanya diproses oleh mikrokontroler
dan hasilnya akan ditunjukan pada motor servo dengan jarum sebagai penunjuk
arah dan divisualisasikan pada Liquid Crystal Display (LCD).
1.2 Maksud dan Tujuan
Maksud dari pembuatan alat ini adalah :
2 Tujuan dari pembuatan alat ini adalah:
Memudahkan umat Islam dalam menentukan arah kiblat ketika sedang
bepergian ke tempat yang tidak diketahui arah kiblatnya atau dalam perjalanan
laut serta di tempat yang tidak ada masjid ataupun musholla.
1.3 Rumusan Masalah
Rumusan masalah yang akan dibahas adalah :
1. Bagaimana merancang sistem penentu arah kiblat portable berbasis
mikrokontroler?
2. Bagaimana pemanfaatan GPS untuk mencari koordinat user berada?
3. Bagaimana sensor kompas membaca arah mata angin?
4. Bagaimana menghubungkan data dari sensor kompas dan GPS ke
mikrokontroler?
5. Bagaimana menggerakan motor servo sebagai motor penggerak jarum
penunjuk arah kiblat berdasarkan data dari mikrokontroler?
6. Bagaimana menampilkan data dari mikrokontroler ke LCD?
1.4 Batasan Masalah
Pada perancangan sistem yang akan dibuat ini terdapat beberapa batasan
masalah, yaitu:
1. Penentuan arah kiblat dengan menggunakan sensor kompas dan GPS sebagai
input data mikrokontroler.
2. Pemrograman mikrokontroler Basic Stamp BS2P40 dengan bahasa
pemrograman Basic.
3. Motor Servo dan Jarum sebagai output dan penunjuk arah kiblat.
4. LCD sebagai output visual.
1.5 Sistematika Penulisan
Agar mempermudah penulisan dalam menyusun laporan akhir secara lebih
jelas dan sistematis, maka dilakukan pembagian dalam sistematika penulisan yang
3 BAB I PENDAHULUAN
Bab ini mengemukakan latar belakang pemilihan judul, tujuan dan
manfaat, perumusan masalah, metode penulisan, serta sistematika
penulisan.
BAB II TINJAUAN PUSTAKA
Bab ini akan menjelaskan tentang semua landasan teori yang berhubungan
dengan hardware yang akan dibuat.
BAB III PERANCANGAN SISTEM
Bab ini menjelaskan perancangan hardware, mulai dari tujuan, komponen
yang digunakan, perancangan desain hardware, pembuatan program, dan
cara menggunakan/ menjalankan hardware..
BAB IV PENGUJIAN DAN ANALISA
Bab ini berisi bahasan yang ditekankan pada perumusan masalah, yaitu
tentang pengujian lapangan, serta prinsip kerja dari hardware.
BAB V KESIMPULAN DAN SARAN
Bab ini berisikan kesimpulan dari hasil pembahasan serta saran yang
diberikan penulis kepada mahasiswa yang akan mengembangkan Tugas
4
Mukarraomah. Arah yang dimaksud adalah arah dengan jarak terdekat menuju ke
Ka’bah.
Ketika melaksanakan sholat, baik sholat sunnah maupun fardhu diharuskan
menghadap ke arah kiblat. Dari empat mazhab, Hanafi, Maliki, Syafi'i dan
Hambali sepakat bahwa salah satu syarat sahnya sholat adalah menghadap ke arah
kiblat, yakni ke Ka'bah di Makkah Al-Mukarromah dan tidak ke yang lainnya.
Karena menghadap ke arah kiblat adalah menjadi syarat syahnya sholat, maka
hukum untuk mengetahui arah kiblat adalah wajib.[1]
2.1.1Hukum Arah Kiblat
Kiblat sebagai pusat tumpuan umat Islam dalam mengerjakan ibadah dalam
konsep arah terdapat beberapa hukum yang berkaitan yang telah ditentukan secara
syariat yaitu:
a. Hukum Wajib
1. Ketika shalat fardhu ataupun shalat sunat menghadap kiblat merupakan
syarat sahnya shalat
2. Ketika melakukan tawaf di Baitullah.
3. Ketika menguburkan jenazah maka harus diletakkan miring bahu kanan
menyentuh liang lahat dan muka menghadap kiblat.
b. Hukum Sunat
Bagi yang ingin membaca Al-Quran, berdoa, berzikir, tidur (bahu kanan
5
c. Hukum Haram
Ketika membuang air besar atau kecil di tanah lapang tanpa ada dinding
penghalang.
d. Hukum Makruh
Membelakangi arah kiblat dalam setiap perbuatan seperti membuang air
besar atau kecil dalam keadaan berdinding, tidur menelentang sedang kaki
selunjur ke arah kiblat dan sebagainya.
2.1.2Pengukuran Arah Kiblat Dengan Cara Tradisional
Ŷ Istiwa A'zam - Matahari Istiwa di Atas Ka'bah
Kejadian saat posisi matahari istiwa (kulminasi) tepat di atas Ka'bah terjadi
dua kali setahun yaitu pada setiap tanggal 28 Mei sekitar pukul 16.18 WIB dan
pada 16 Juli sekitar jam 16.28 WIB. Ketika matahari istiwa di atas Ka'bah,
bayang-bayang objek tegak di seluruh dunia akan lurus ke arah kiblat.[7]
Gambar 2.1. Kedudukan matahari di atas Ka'bah.
Ŷ Menggunakan Rasi Bintang (Konstelasi)
Rasi Bintang ialah sekumpulan bintang yang berada di suatu kawasan langit
serta mempunyai bentuk yang hampir sama dan kelihatan berdekatan antara satu
sama lain. Menurut International Astronomical Union ( IAU ), kubah langit
dibagi menjadi delapan puluh delapan (88) kawasan rasi bintang. Bintang-bintang
yang berada disuatu kawasan yang sama adalah dalam satu rasi. Masyarakat
dahulu telah menetapkan sesuatu rasi bintang mengikuti bentuk yang mudah
6
mengetahui bentuk rasi tertentu, arah mata angin dan arah Kiblat dari suatu
tempat dapat ditentukan.[7]
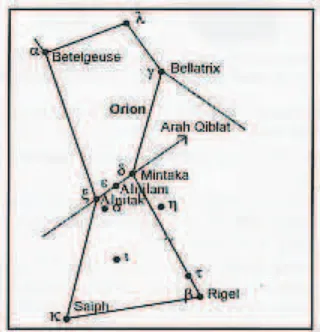
Ŷ Rasi Orion (Al-Babudur)
Pada rasi ini terdapat tiga bintang yang berderet yaitu Mintaka, Alnilam dan
Alnitak. Arah Kiblat dapat diketahui dengan mengunjurkan arah tiga bintang
berderet tersebut ke arah Barat. Rasi Orion akan berada di langit Indonesia ketika
waktu subuh pada Juli dan kemudian akan kelihatan lebih awal pada bulan
Desember. Pada bulan Maret Rasi Orion akan berada ditengah-tengah langit pada
waktu Maghrib.[7]
Gambar 2.2. Bentuk Rasi Orion dan Penentuan Arah Kiblat.
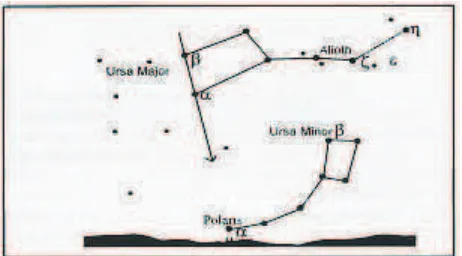
Ŷ0HQJJXQDNDQNHGXGXNDQ%LQWDQJ$O-Qutbi / Kutub (Polaris)
Bintang-bintang akan kelihatan mengelilingi pusat kutub yang ditunjukkan
oleh bintang kutub (Polaris). Oleh itu bintang ini menunjukkan arah Utara benar
dari manapun di muka bumi ini. Bintang kutub terletak dalam buruj al-judah (
Rasi Bajak / Ursa Minoris ) dan rasi ini hanya dapat dilihat oleh masyarakat di
bagian Utara katulistiwa pada tengah malam pada bulan Juli hingga Desember
setiap tahun. Kedudukan bintang kutub bisa dikenali berdasarkan bentuk rasi
7
Gambar 2.3. Rasi Al-Judah (Bajak / Ursa Minoris)
Arah kiblat yang sesusai ditentukan berdasarkan perbedaan sudut sekitar
65°' ( Jawa/Sumatra ) ke kiri dari kedudukan bintang kutub seperti yang
ditunjukkan dalam gambar. Gunakanlah petunjuk sudut dengan jari untuk
menentukan nilai bukaan sudut.[7]
Gambar 2.4. Panduan jari untuk perkiraan nilai sudut.
2.1.3Pengukuran Arah Kiblat Dengan Cara Modern
Ŷ Menggunakan Kompas
Penandaan arah kiblat dengan kompas banyak diamalkan di kalangan
masyarakat Islam masa kini. Arah yang ditunjukkan oleh kompas adalah arah
yang merujuk kepada arah utara magnet. Arah utara magnet ternyata tidak mesti
sama dengan arah utara sebenarnya. Perbedaan arah utara ini disebut sebagai
sudut serong magnet atau deklinasi yang juga berbeda diseiap tempat dan selalu
berubah sepanjang tahun. Satu lagi masalah yang bisa timbul dari menggunakan
kompas ialah tarikan gravitasi setempat dimana ia terpengaruh oleh bahan-bahan
logam atau arus listrik di sekeliling kompas yang digunakan. Namun ia dapat
8
Gambar 2.5. Kompas
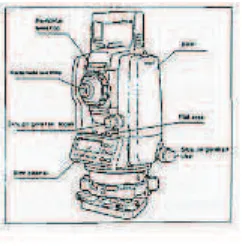
Ŷ Menggunakan Theodolit
Teodolit merupakan antara alat termoden yang dapat digunakan oleh
kebanyakaan pihak yang melakukan kerja menentukan arah kiblat. Theodolit
dapat digunakan untuk mengukur sudut secara mendatar dan tegak, dan juga
memberi memiliki akurasi atau ketelitian yang cukup tinggi dan tepat. Untuk
mengendalikan alat ini diperlukan operator yang terlatih dan menguasai teknik
penggunaan theodolit secara benar.[7]
Gambar 2.6. Theodolit
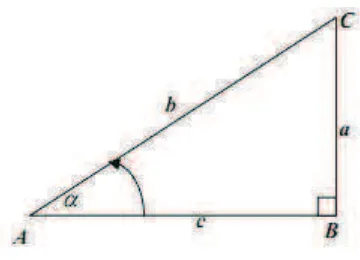
2.2 Trigonometri
Trigonometri berasal dari bahasa yunani yaitu trigonon yang artinya tiga
sudut dan metro yang artinya mengukur. Jadi, trigonometri adalah cabang ilmu
matematika yang mempelajari perhitungan tiga sudut. Fungsi dasar trigonometri
yaitu sinus (sin), kosinus (cos) dan tangen (tan). Dengan menggunakan fungsi
dasar trigonometri dapat diketahui besar sudut terkecil dalam segitiga siku-siku.
9
Gambar 2.7. Trigonometri
Fungsi dasar :
Sin Į
&RVĮ
7DQĮ =
2.3 GPS
Global Positioning System (GPS) adalah suatu sistem radio navigasi
penentuan posisi dengan menggunakan satelit. GPS dapat memberikan posisi
suatu objek di muka bumi dengan akurat dan cepat (tiga dimensi koordinat x, y, z)
dan memberikan informasi waktu serta kecepatan bergerak secara kontinyu di
seluruh dunia. Satelit GPS mempunyai konstelasi 24 satelit dalam enam orbit
yang mendekati lingkaran. Setiap orbit ditempati oleh 4 buah satelit dengan
interval antara yang tidak sama.
Dengan adanya 24 satelit di angkasa, 4 sampai dengan 10 satelit GPS setiap
saat akan selalu dapat diamati di seluruh permukaan bumi. Sinyal satelit GPS
dipancarkan secara broadcast oleh satelit GPS secara kontinyu. Dengan
mengamati sinyal satelit menggunakan receiver GPS seseorang dapat menentukan
posisi (lintang, bujur) di permukaan bumi. Informasi lainnya yang didapat dari
satelit GPS selain posisi adalah kecepatan, arah, jarak, dan waktu.[5]
Penggunaan satelit untuk penentuan posisi (dalam pengertian lokasi ataupun
ruang) memudahkan para pengguna sistem informasi memperoleh informasi yang
10
2.3.1Penentuan Posisi dengan GPS
Pada dasarnya konsep dasar penentuan posisi dengan GPS adalah reseksi
dengan jarak, yaitu dengan pengukuran jarak secara simultan ke beberapa satelit
GPS yang koordinatnya telah diketahui. Operasi sistem ini memerlukan
sinkronisasi yang presisi dari clock satelit dengan sistem waktu GPS. Hal ini
dimungkinkan dengan digunakannya standar frekuensi atom pada masing-masing
satelit dan dilengkapi parameter koreksi clock presisi yang disinkronisasikan
dengan sistem waktu GPS.
Dari beberapa satelit, akan diukur jarak ke satelit-satelit tersebut terhadap
penerima. Maka akan didapatkan 4 variabel(x,y,z,t)sebagai fungsi koordinat
posisi penerima dan koreksi clock dari penerima. Untuk hal tersebut maka
diperlukan minimal 4 satelit sekaligus.
Posisi yang diberikan GPS adalah posisi 3 dimensi (X,Y,Z). Dalam GPS
titik yang akan ditentukan posisinya dapat dalam keadaan diam atau bergerak.
Posisi titik dapat ditentukan dengan satu receiver GPS terhadap pusat bumi atau
menggunakan metode absolut (point positioning) ataupun terhadap titik lainnya
yang telah diketahui koordinatnya (monitor station) dengan
menggunakan differential (relative positioning) yang minimal menggunakan
2 receiver GPS.
Penentuan posisi secara diferensial adalah metode penentuan posisi yang
harus digunakan untuk mendapatkan ketelitian posisi yang relatif tinggi. Setelah
itu dilakukan pemrosesan data untuk menentukan koordinat dari titik-titik yang
mencakup 3 tahap utama penghitungan, yaitu :
1. Pengolahan data dari setiap baseline dalam jaringan.
2. Perataan jaringan yang melibatkan semua baseline untuk menentukan koordinat
dari titik-titik dalam jaringan.
3. Transformasi koordinat titik-titik tersebut dari datum WGS84 ke datum yang
diperlukan pengguna.
Dengan melakukan pengamatan sinyal-sinyal dari satelit dalam jumlah dan
waktu yang cukup, seseorang dapat memprosesnya untuk mendapatkan informasi
11
2.3.2Segmen Sistem GPS
a. Segmen Kontrol
Segmen kontrol terdiri dari suatu sistem yang mengontrol kegiatan satelit
GPS yang tersebar di seluruh dunia. Selain mengontrol dan memonitor satelit,
segmen kontrol ini juga berfungsi menentukan orbit dari seluruh satelit GPS yang
merupakan informasi paling penting untuk penentuan posisi dengan satelit GPS.
Segmen kontrol ini terdiri dari Ground Control Stations (GCS), Monitor
Stations (MS), Prelaunch Compatibility Station (PCS), dan Master Control
Station (MCS). MS bertugas mengamati secara kontinyu seluruh satelit GPS.
Seluruh data yang dikumpulkan oleh MS ini kemudian dikirimkan ke MCS untuk
diproses guna memperoleh parameter-parameter penting lainnya. Hasil
perhitungan tersebut dikirimkan ke GCS untuk selanjutnya dikirimkan ke
satelit-satelit GPS.
b. Segmen Satelit
Segmen satelit terdiri dari satelit-satelit GPS. Konstelasi GPS terdiri dari 24
satelit yang menempati enam buah bidang orbit yang berbentuk mendekati
lingkaran, dengan masing-masing bidang orbit ditempati empat buah
satelit.Kedudukan masing-masing satelit dalam tiap orbitnya diatur sedemikian
rupa dengan jarak interval diantaranya tidak sama. Hal ini dimaksudkan untuk
meminimalkan pengaruh keadaan dimana ada satelit yang tidak berfungsi.
c. Segmen Pengguna
Segmen pengguna terdiri dari para pengguna yang tersebar di seluruh
permukaan bumi dan alat penerima GPS. Secara umum segmen pengguna ini
dibagi menjadi dua yaitu Pengguna GPS, dan Pengguna Sipil.[5]
2.3.3Protokol NMEA 0183
Protokol NMEA 0183 (National Marine Electronics Association)
merupakan suatu badan yang menerbitkan spesifikasi yang mendeskripsikan
berbagai perlengkapan navigasi agar dapat berkomunikasi satu sama lain melalui
12
file data ASCII dalam pentransmisian sistem informasi GPS dari receiver ke
hardware yang berfungsi sebagai input dari posisi dan merupakan realtime untuk
navigasi dibidang kelautan. Salah satu aplikasi protokol ini adalah pada
komunikasi data GPS.
Parameter yang digunakan oleh protokol ini adalah sebagai berikut :
a. Baudrate : 4800
informasi lainnya. Setiap kalimat terdiri dari awalan, ditambah satu atau lebih
blok data, masing-masing dipisahkan oleh koma.[4]
GPS menerima data dari satelit dan mengirimkannya ke bagian keluaran
dengan format data yang beragam. Data yang dikirimkan oleh GPS mengacu pada
standar NMEA 0183, yaitu standar kalimat laporan yang dikeluarkan oleh GPS
receiver. Standar NMEA memiliki banyak jenis bentuk kalimat laporan
diantaranya yang paling penting adalah koordinat lintang (latitude), bujur
(longitude), ketinggian (altitude), waktu sekarang standar UTC (UTC Time) dan
kecepatan (speed over ground).
Berikut ini adalah jenis kalimat NMEA 0183:
a. $GPGGA (Global Positioning System Fixed Data)
b. $GPGLL (Geographic –Latitude/Longitude)
c. $GPGSA (GNSS DOP and Aktive Satelites)
d. $GPGSV (GNSS Satelite In View)
e. $GPRMC (Recommended Minimum Specific GNSS Data)
f. $GPVTG (Course Over Ground and Ground Speed)
Setiap data diawali dengan karakter “$” dan diakhiri dengan <CR><LF>.
Pada prakteknya tidak semua data dengan header ini diambil, hanya yang
13
2.4 Kompas Dan Sensor Kompas
Kompas adalah alat untuk menentukan arah berupa sebuah panah
penunjuk magnetis yang bebas menyelaraskan dirinya dengan medan magnet
bumi secara akurat. Kompas memberikan rujukan arah tertentu, sehingga sangat
membantu dalam bidang navigasi. Arah mata angin yang ditunjuknya adalah
utara, selatan, timur, dan barat.
Lokasi magnet di Kutub Utara selalu bergeser dari masa ke masa.
Penelitian terakhir yang dilakukan oleh The Geological Survey of Canada
melaporkan bahwa posisi magnet ini bergerak kira-kira 40 km per tahun ke
arah barat laut.
Berikut ini adalah arah mata angin yang dapat ditentukan kompas.
a. Utara (disingkat U atau N)
b. Barat (disingkat B atau W)
c. Timur (disingkat T atau E)
d. Selatan (disingkat S)
e. Barat laut (antara barat dan utara, disingkat NW)
f. Timur laut (antara timur dan utara, disingkat NE)
g. Barat daya (antara barat dan selatan, disingkat SW)
h. Tenggara (antara timur dan selatan, disingkat SE)
Kompas dibedakan menjadi dua jenis, yaitu kompas analog dan
kompas digital.
A.Sensor Kompas Hitachi HM55B
Kompas adalah alat yang menunjukan arah mata angin, yaitu utara,
selatan, barat, dan timur. Kompas hitachi HM55B merupakan salah satu kompas
digital yang dikembangkan oleh parallax yang mempunyai keluaran digital
sebanyak 2 axis yaitu axis X dan axis Y. Kompas ini memiliki regulator internal
yang mengubah tegangan menjadi 3V dan itu merupakan daerah kerja kompas ini.
14
mikrokontroler memudahkan menampilkan arah dalam format 3600. Gambar 2.8
menunjukan tampilan dan konfigurasi pin kompas hitachi HM55B.
Gambar 2.8. Tampilan dan konfigurasi pin kompas hitachi HM55B
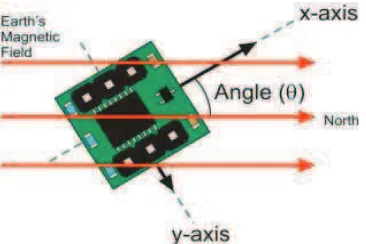
B.Cara kerja Modul kompas HITACHI HM55B adalah sebagai berikut:
Modul kompas hitachi HM55B memiliki dua sumbu, x dan y. Setiap sumbu
melaporkan kekuatan medan magnet yang sejajar dengan komponen itu. Sumbu x melaporkan (kekuatan medan) × cos (ș GDQ VXPEX \ melaporkan (kekuatan medan) × sin (ș 8QWXNPHQHWDSNDQșNHVXGXWGDULXWDUDGLJXQDNDQDUFWDQ\
x), yang dalam PBASIC 2,5 adalah x ATN y. Perintah ATN mengubah satuan
derajat ke radian, yang mengurai lingkaran penuh menjadi 256 segmen yang
sama. Untuk mengkonversi kembali ke derajat (360 segmen yang sama) pada
PBASIC, digunakan perintah * / 360.
Gambar 2.9. Cara kerja modul kompas HM55B
Chip hitachi HM55B pada modul kompas hitachi HM55B melaporkan
pengukuran sumbu x dan y dalam hal atau microteslas (µT) dalam 11-bit bilangan
bertanda. HM55B ini dirancang untuk mengembalikan nilai 1 untuk medan
magnet utara dari 1 µT paralel ke salah satu sumbunya. Jika medan magnet adalah
selatan (utara di arah yang berlawanan), nilai akan -1. Perlu diingat bahwa ini
adalah nilai nominal. Menurut datasheet HM55B, nilai µT aktual untuk
15
tidak akan muncul negatif dalam variabel kata kecuali mask diterapkan. Misalnya,
ketika bit-10 adalah 1, bit 11 sampai 15 juga berubah menjadi 1 dengan mask
dalam program uji.
Mikrokontroler yang terhubung ke HM55B harus mengontrol enable dan
clock input dan menggunakan komunikasi serial sinkron untuk mendapatkan
pengukuran sumbu dari pin data input dan pin data output. Misalnya, BASIC
Stamp 2 yang dapat diprogram untuk mengontrol enable modul kompas dengan
high / low dan mengirim nilai-nilai yang mengatur ulang perangkat dan memulai
pengukuran dengan perintah SHIFTOUT. Perintah SHIFTOUT mengontrol clock
input karena mengirimkan nilai bit data untuk data input modul kompas.
Kebalikan dari SHIFTOUT adalah SHIFTIN, yang juga mengontrol clock input
perangkat seperti mengumpulkan bit data yang dikirim oleh pin data output.
Dibutuhkan 30 sampai 40 ms HM55B untuk menyelesaikan pengukuran
tertentu. Mikrokontroler dapat melakukan tugas-tugas lain sampai pengukuran
selesai. Polling ini merupakan kombinasi dari perintah SHIFTOUT yang meminta
status. Ketika SHIFTIN menerima flag status yang menunjukkan bahwa
pengukuran selesai, perintah SHIFTIN kedua kemudian dapat menyimpan 11-bit
pengukuran sumbu x dan y dalam variable. [4]
Modul kompas HITACHI HM55B memiliki fitur sebagai berikut:
a. Sensitif hingga ukuran dalam kekuatan medan magnet
b. Menyederhanakan arah dengan membagi pengukuran magnet menjadi 2 axis
c. Baik untuk pengukuran resolusi 6-bit setelah mengkalibrasi software
d. Mempunyai waktu 30 hingga 40 ms ketika pengukuran dimulai hingga data
ready
e. Breadboard yang compact dan mudah digunakan (0,3 inchi, paket 6 pin DIP)
f. Membuat komunikasi dan perhitungan arah yang mudah khususnya dengan
instruksi PBASIC (SHIFTIN, SHIFTOUT, dan ATN untuk mikrokontroler
Basic Stamp Seri 2).
Selain itu sensor ini telah digunakan untuk berbagai aplikasi seperti sensor
16
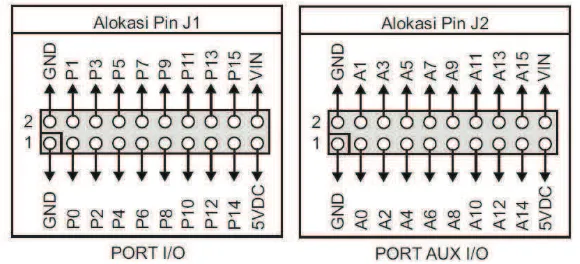
2.5 Mikrokontroler Basic Stamp BS240
Basic Stamp adalah mikrokontroler yang dikembangkan oleh Parallax Inc.
yang diprogram menggunakan bahasa pemrograman basic. Program yang dibuat
di-download melalui port serial. Jumlah pin I/O yang terdapat di mikrokontroler
ini adalah 32, sehingga akan cukup untuk mengoperasikan sensor GPS maupun
kompas.[4]
Gambar 2.10.Mikrokontroler Basic Stamp BS2P40
Spesifikasi Basic Stamp BS2P40:
a. Chip PBASIC48W/P40
b. 8 x 2 Kbyte EEPROM yang mampu menampung hingga 4000 instruksi
c. Kecepatan prosesor 20 MHz Turbo dengan kecepatan eksekusi program hingga
12000 instruksi per detik
d. RAM sebesar 38 byte (12 I/O, 26 variabel) dengan Scratch Pad sebesar 128
byte
e. Jalur input/output sebanyak 32 pin
f. Tegangan masukan 9-12 VDC dengan tegangan keluaran 5 VDC
17
2.6 Motor Servo
Motor servo adalah sebuah motor dengan sistem closed feedback di mana
posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di
dalam motor servo. Motor ini terdiri dari sebuah motor, serangkaian gear,
potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan
batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur
berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor.
Tampak pada gambar dengan pulsa 1.5 mS pada periode selebar 2 mS maka sudut
dari sumbu motor akan berada pada posisi tengah. Semakin lebar pulsa off maka
akan semakin besar gerakan sumbu ke arah jarum jam dan semakin kecil pulsa off
maka akan semakin besar gerakan sumbu ke arah yang berlawanan dengan jarum
jam.
Motor servo biasanya hanya bergerak mencapai sudut tertentu saja dan tidak
kontinyu seperti motor DC maupun motor stepper. Walau demikian, untuk
beberapa keperluan tertentu, motor servo dapat dimodifikasi agar bergerak
kontinyu. Pada robot, motor ini sering digunakan untuk bagian kaki, lengan atau
bagianbagian lain yang mempunyai gerakan terbatas dan membutuhkan torsi
cukup besar. [6]
Motor servo adalah motor yang mampu bekerja dua arah (CW dan CCW)
dimana arah dan sudut pergerakan rotornya dapat dikendalikan hanya dengan
memberikan pengaturan duty cycle sinyal PWM pada bagian pin kontrolnya.
18
Motor Servo merupakan sebuah motor DC yang memiliki rangkaian control
elektronik dan internal gear untuk mengendalikan pergerakan dan sudut
angularnya.
Motor servo adalah motor yang berputar lambat, dimana biasanya
ditunjukkan oleh rate putarannya yang lambat, namun demikian memiliki torsi
yang kuat karena internal gearnya.
Lebih dalam dapat digambarkan bahwa sebuah motor servo memiliki :
Ø Tiga jalur kabel : power, ground, dan control
Ø Sinyal control mengendalikan posisi
Ø Operasional dari motor servo dikendalikan oleh sebuah pulsa selebar ± 20 ms, dimana lebar pulsa antara 0.5 ms dan 2 ms menyatakan akhir dari range sudut
maksimum.
Ø Konstruksi didalamnya meliputi internal gear, potensiometer, dan feedback control.
2.7 LCD
Liquid Crystal Display (LCD) adalah suatu jenis media tampil yang
menggunakan kristal cair sebagai penampil utama. LCD sudah digunakan
diberbagai bidang misalnya alal–alat elektronik seperti televisi, kalkulator,
ataupun layar komputer. Aplikasi LCD yang digunakan ialah LCD dot matrik
dengan jumlah karakter 2 x 16. LCD berfungsi sebagai penampil yang nantinya
akan digunakan untuk menampilkan output.
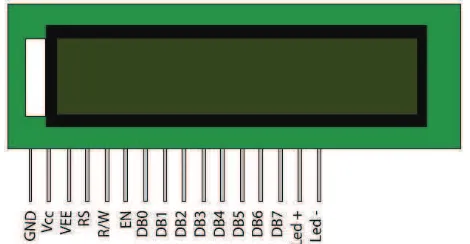
2.7.1Fitur dan Konfigurasi Pin LCD
Adapun fitur yang disajikan dalam LCD ini adalah :
a. Terdiri dari 16 karakter dan 2 baris.
b. Mempunyai 192 karakter tersimpan.
c. Terdapat karakter generator terprogram.
d. Dapat dialamati dengan mode 4-bit dan 8-bit.
19
Gambar 2.13. LCD 16x2
Tabel 2.1. Konfigurasi Pin LCD
Pin Deskripsi
1 Ground
2 Vcc
3 Pengatur kontras
4 “RS” Instruction/Register Select
5 “R/W” Read/Write LCD Registers
6 “EN” Enable
7-14 Data Bit 0 – 7
15 Vcc
16 Ground
2.7.2Cara kerja LCD secara umum
Pada aplikasi umumnya RW diberi logika rendah “0”. Bus data terdiri dari
4-bit atau 8-bit. Jika jalur data 4-bit maka yang digunakan ialah DB4 sampai
dengan DB7. Sebagaimana terlihat pada tabel diskripsi, interface LCD
merupakan sebuah parallel bus, dimana hal ini sangat memudahkan dan sangat
cepat dalam pembacaan dan penulisan data dari atau ke LCD. Kode ASCII yang
ditampilkan sepanjang 8-bit dikirim ke LCD secara 4-bit atau 8 bit pada satu
waktu. Jika mode 4-bit yang digunakan, maka 2 nibble data dikirim untuk
membuat sepenuhnya 8-bit (pertama dikirim 4-bit MSB lalu 4-bit LSB dengan
pulsa clock EN setiap nibblenya). Jalur control EN digunakan untuk memberitahu
20
LCD program harus menset EN ke kondisi high “1” dan kemudian menset dua
jalur kontrol lainnya (RS dan R/W) atau juga mengirimkan data ke jalur data bus.
Saat jalur lainnya sudah siap, EN harus diset ke “0” dan tunggu beberapa
saat (tergantung pada datasheet LCD), dan set EN kembali ke high “1”. Ketika
jalur RS berada dalam kondisi low “0”, data yang dikirimkan ke LCD dianggap
sebagai sebuah perintah atau instruksi khusus (seperti bersihkan layar, posisi
kursor). Ketika RS dalam kondisi high atau “1”, data yang dikirimkan adalah data
ASCII yang akan ditampilkan dilayar. Misal, untuk menampilkan huruf “A” pada
layar maka RS harus diset ke “1”. Jalur kontrol R/W harus berada dalam
kondisi low (0) saat informasi pada data bus akan dituliskan ke LCD. Apabila
R/W berada dalam kondisi high “1”, maka program akan melakukan query
(pembacaan) data dari LCD. Instruksi pembacaan hanya satu, yaitu Get LCD
status (membaca status LCD), lainnya merupakan instruksi penulisan. Jadi hampir
setiap aplikasi yang menggunakan LCD, R/W selalu diset ke “0”. Jalur data dapat
terdiri 4 atau 8 jalur (tergantung mode yang dipilih pengguna), DB0, DB1, DB2,
DB3, DB4, DB5, DB6 dan DB7. Mengirim data secara parallel baik 4-bit atau
8-bit merupakan 2 mode operasi primer. Untuk membuat sebuah aplikasi
interface LCD, menentukan mode operasi merupakan hal yang paling penting.
Mode 8-bit sangat baik digunakan ketika kecepatan menjadi keutamaan dalam
sebuah aplikasi dan setidaknya minimal tersedia 11 pin I/O (3 pin untuk kontrol, 8
pin untuk data). Sedangkan mode 4 bit minimal hanya membutuhkan 7-bit (3 pin
untuk kontrol, 4 pin untuk data). Bit RS digunakan untuk memilih apakah data
atau instruksi yang akan ditransfer antara mikrokontroller dan LCD. Jika bit ini di
set (RS = 1), maka byte pada posisi kursor LCD saat itu dapat dibaca atau ditulis.
Jika bit ini di reset (RS = 0), merupakan instruksi yang dikirim ke LCD atau status
21
BAB III
PERANCANGAN SISTEM
3.1 Perancangan Secara Umum
3.1.1Diagram Blok Sistem
Sensor Kompas
Mikrokontroler
LCD
MOTOR SERVO
JARUM PENUNJUK
ARAH
Gambar 3.1. Diagram blok sistem
3.1.2Penjelasan Diagram Blok
1. Mikrokontroler Basic Stamp BS2P40 berfungsi sebagai unit kontrol yang akan
mengontrol semua perangkat pada sistem penentu arah kiblat.
2. Global Positioning System (GPS) berfungsi sebagai sensor untuk mencari
koordinat dimana user berada.
3. Sensor Kompas berfungsi sebagai sensor untuk mencari arah mata angin yang
akan dijadikan sebagai acuan dalam menentukan arah kiblat.
4. Motor Servo berfungsi sebagai output penggerak jarum yang berfungsi
sebagai penunjuk arah.
22
3.2 Perancangan Perangkat Keras
3.2.1Mikrokontroler
Basic Stamp adalah mikrokontroler yang dikembangkan oleh Parallax Inc
yang deprogram menggunakan bahasa pemrograman basic. Program yang dibuat
di-download melalui port serial. Jumlah pin I/O yang terdapat di mikrokontroler
ini adalah 32, sehingga akan cukup untuk mengoperasikan sensor GPS maupun
kompas.
Spesifikasi Basic Stamp BS2P40:
a. Chip PBASIC48W/P40
b. 8 x 2 Kbyte EEPROM yang mampu menampung hingga 4000 instruksi
c. Kecepatan prosesor 20 MHz Turbo dengan kecepatan eksekusi program hingga
12000 instruksi per detik
d. RAM sebesar 38 byte (12 I/O, 26 variabel) dengan Scratch Pad sebesar 128
byte
e. Jalur input/output sebanyak 32 pin
f. Tegangan masukan 9-12 VDC dengan tegangan keluaran 5 VDC
Tabel 3.1. Tabel pin I/O mikrokontroler yang digunakan
No. Pin Digunakan Untuk
23 3.2.2Sensor
3.2.2.1.Global Positioning System (GPS)
Dalam perancangan ini digunakan GPS sebagai sensor untuk mengetahui
letak koordinat user berada. GPS receiver yang dipakai pada sistem ini adalah
GPS modul engine PMB-648. GPS ini memiliki 6 buah pin. Gambar 3.2
menunjukan konfigurasi pada GPS engine PMB-648.
Gambar 3.2. Konfigurasi GPS PMB-648
GPS akan mengeluarkan data dengan format NMEA, NMEA 0138
merupakan data yang dipakai dalam peracangan sistem ini. NMEA 0813 berisi
informasi yang berhubungan dengan geografi seperti waktu, longitude, latitude,
ketinggian, kecepatan, dan masih banyak lagi. Standar NMEA 0813 menggunakan
format ASCII sederhana, masing-masing kalimat mendefinisikan masing-masing
tipe pesan yang dapat dipilah-pilah.
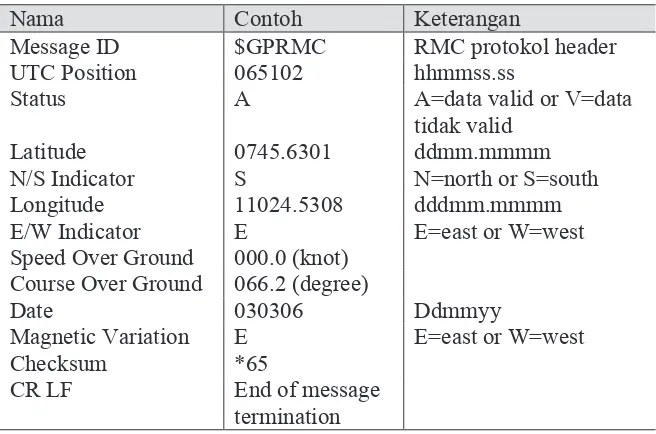
NMEA 0183 memiliki bermacam-macam tipe kalimat, salah satunya adalah
RMC (Recomended Minimum Navigation Information). Data inilah yang dipakai
sebagai data koordinat user berada. NMEA tipe RMC ini mengeluarkan data
sebagai berikut :
$GPRMC,065102,A,0745.6301,S,11024.5308,E,000.0,006.2,030306,001.0,E*65<
24
Tabel 3.2. Format keluaran data GPS header $GPRMC
Nama Contoh Keterangan Longitude 11024.5308 dddmm.mmmm E/W Indicator E E=east or W=west
merupakan data yang akan dikalibrasi sehingga nantinya menghasilkan sudut yang
menuju ke arah kiblat.
3.2.2.2.Sensor Kompas
Modul kompas Hitachi HM55B merupakan sensor magnetik dual axis yang
dapat digunakan untuk mendeteksi arah pada proyek robotik atau elektronik.
Sebuah regulator onboard dan proteksi resistor membuat chip HM55B (3 volt)
cocok dengan level sinyal dan tegangan mikrokontroler Basic Stamp (5 volt).
Dalam perancangan ini kompas digunakan untuk mencari arah utara yang
akan dijadikan sebagai arah acuan dalam menentukan arah kiblat.
25
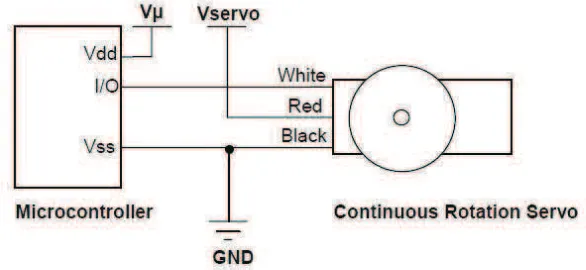
3.2.3Motor Servo
Motor servo adalah motor yang mampu bekerja dua arah, dimana arah dan
sudut pergerakan rotornya dapat dikendalikan hanya dengan memberikan
pengaturan duty cycle sinyal PWM pada bagian pin kontrolnya.
Motor servo pada perancangan ini berfungsi sebagai motor penggerak jarum
penunjuk arah kiblat.
Gambar 3.4. Konfigurasi Motor Servo
3.2.4LCD
Liquid Crystal Display (LCD) adalah suatu jenis media tampil yang
menggunakan kristal cair sebagai penampil utama.
Pada perancangan alat ini LCD digunakan sebagai output visual yang
menunjukan arah mata angin.
26
3.2.5Perancangan Mekanik
3.2.5.1.Bentuk
Bentuk dari sistem penentu arah kiblat disesuaikan dengan komponen yang
menjadi bahan dalam perancangan sistem penentu arah kiblat yang dibuat.
Adapun bentuk dari sistem penentu arah kiblat adalah seperti berikut :
Gambar 3.6. Desain Sistem Penentu Arah Kiblat 2D
3.2.5.2.Dimensi
Adapun ukuran dari sistem penentu arah kiblat adalah :
Tinggi : 15 cm
27
3.3 Perancangan Perangkat Lunak
3.3.1Algoritma Secara Umum
Gambar 3.7. Diagram alir cara kerja sistem secara umum
Perancangan sistem penentu arah kiblat portable berbasis mikrokontroler
memanfaatkan GPS untuk menentukan letak pengguna dan sensor kompas untuk
menentukan arah mata angin. Pada mikrokontroler data dari GPS dan sensor
kompas diolah sehingga didapatkan derajat arah ka’bah. Kemudian
mikrokontroler menggerakan motor servo untuk menunjuk arah kiblat dan
28
Tabel 3.3. Keterangan diagram alir cara kerja sistem secara umum
Indeks Keterangan
A Awal dari program
B Inisialisasi variable GPS dan kompas
C Proses membaca data GPS (latitude dan longitude) dan kompas
D Kalkulasi untuk mencari sudut arah kiblat dan membaca arah mata angin
E Kirim data hasil kalkulasi sebagai acuan pergerakaan motor servo dan
ditampilkan pada LCD
F Kembali ke sistem utama
3.3.1Algoritma pengolahan data GPS
29
Mikrokontroler berfungsi sebagai pengolah data dari GPS. Ketika GPS
mengeluarkan data GPRMC maka data disimpan dan secara langsung diolah
untuk menghasilkan besaran sudut arah kiblat. Untuk memperoleh besaran sudut
tersebut diperlukan dua garis siku-siku yaitu garis C dan garis B. Panjang garis C
diperoleh dari pengurangan data latitude user dikurangi data latitude ka’bah,
sedangkan panjang garis B diperoleh dari pengurangan data longitude user
dikurangi data longitude ka’bah. Setelah panjang garis C dan panjang garis B
diketahui, digunakan fungsi ATN pada basic stamp untuk memperoleh besaran
sudut menuju arah kiblat yang diwakili variable alpha.
Tabel 3.4. Keterangan diagram alir pengolahan data GPS
Indeks Keterangan
A Awal dari program
B Inisialisasi variable GPS
C Proses membaca data GPS (latitude dan longitude)
D Tunggu data dengan header “GPRMC”
E Simpan data GPS ke variable
F Pengolahan koordinat posisi user dan koordinat posisi ka’bah
G Proses perhitungan sudut arah kiblat
30
3.3.2Algoritma Pengolahan data kompas digital
Gambar 3.9. Diagram alir pengolahan data kompas digital
Proses dimulai dengan pembacaan data dari kompas digital. Setelah data
kompas diperoleh, digunakan fungsi ATN pada mikrokontroler untuk
memperoleh besaran sudut arah mata angin. Data besaran sudut arah mata angin
tersebut kemudian dikirim ke LCD yang akan menampilkan data besaran sudut
arah mata angin.
Tabel 3.5. Keterangan diagram alir pengolahan data GPS
Indeks Keterangan
A Awal dari program
B Inisialisasi variable kompas
C Proses membaca data kompas
D Proses perhitungan mencari derajat arah mata angin
E Kirim data arah mata angin ke LCD
31
3.3.3Algoritma pengiriman data ke aktuator
Mulai
Gambar 3.10. Diagram alir pengiriman data ke aktuator
Setelah besaran sudut arah kiblat yang diwakili oleh variable alpha dan
besaran sudut arah mata angin yang diwakili oleh variable Dkom diperoleh, kedua
besaran tersebut dapat dijadikan acuan pergerakan motor servo. Jika Dkom <= 1
atau Dkom >= 359 maka derajat (sudut acuan pergerakan motor servo) = 90 –
alpha, jika Dkom >= 89 dan Dkom <= 91 maka derajat = 180 – alpha, jika Dkom
>= 179 dan Dkom <= 181 maka derajat = 90 – alpha, jika Dkom >= 269 dan
32
Tabel 3.6. Keterangan diagram alir pengiriman data ke aktuator
Indeks Keterangan
A Awal dari program
B Menunggu data sudut arah kiblat dan sudut arah mata angin
C Pengecekan kondisi sudut arah mata angin jika lebih dari 359° atau kurang dari 1°
D Pengecekan kondisi sudut arah mata angin jika lebih dari 89° dan kurang dari 91°
E Pengecekan kondisi sudut arah mata angin jika lebih dari 179° atau kurang dari 181°
F Pengecekan kondisi sudut arah mata angin jika lebih dari 269° atau kurang dari 271°
G Besar derajat pergerakan motor servo
H Besar derajat pergerakan motor servo
I Besar derajat pergerakan motor servo
J Besar derajat pergerakan motor servo
K Proses pergerakan motor servo berdasarkan kondisi di atas
33
BAB IV
PENGUJIAN DAN ANALISA
4.1 Tujuan Pengujian
Pengujian dilakukan untuk mengukur keberhasilan sistem yang telah dibuat.
Keberhasilan tersebut dapat diketahui dengan melakukan pengujian terhadap
sistem yang telah dibuat tersebut. Adapun pengujian yang dilakukan adalah
sebagai berikut:
4.2 Pengujian Perangkat Keras
4.2.1Pengujian GPS
Pengujian GPS bertujuan untuk memastikan apakah GPS bekerja dengan
baik. Akurasi data dari GPS akan berpengaruh terhadap akurasi sudut saat
mencari arah kiblat.
Tabel 4.1. Data hasil pengujian GPS
Lokasi Latitude Longitude
Dipati Ukur 0653.2038 LS 10736.9109 BT
Gasibu 0654.0012 LS 10737.1229 BT
Cianjur 0648.1683 LS 10704.8682 BT
Cimahi 0652.3466 LS 10732.5134 BT
Alun-alun Bandung 0655.2611 LS 10736.3359 BT
LS maksudnya adalah lintang selatan dan BT maksudnya adalah bujur
timur. Satuan dari koordinat garis lintang dan bujur adalah derajat.
4.2.2Pengujian Kompas HM55B
Pengujian sensor kompas bertujuan memastikan apakah sensor kompas
dapat membaca arah mata angin dengan benar, sehingga nantinya dapat dijadikan
34
Tabel 4.2. Data hasil pengujian sensor kompas
Arah HM55B Kompas Analog
Utara
Pengujian alat terintegrasi yaitu dengan membandingkan besar sudut arah
kiblat yang ditunjuk oleh alat penentu arah kiblat yang telah dirancang dengan
besar sudut arah kiblat pada beberapa mesjid di kota Bandung. Motor penggerak
jarum penunjuk arah kiblat akan bergerak bersamaan dengan penunjukan salah
satu dari empat arah mata angin oleh sensor kompas.
Pengujian dilakukan sebanyak empat kali yaitu setiap data diambil ketika
sensor kompas menunjuk empat arah mata angin. Data yang ditunjukan pada tabel
4.3 adalah selisih besar sudut arah kiblat pada alat penentu arah kiblat yang telah
dirancang dengan besar sudut arah kiblat pada beberapa mesjid di kota Bandung.
Tabel 4.3. Data hasil pengujian alat terintegrasi
35
4.3 Analisa
4.3.1Analisa data sensor
1. Analisa data GPS
Tabel 4.4. Data hasil uji akurasi data GPS (latitude)
Lokasi Data GPS
PMB-Tabel 4.5. Data hasil uji akurasi data GPS (longitude)
Lokasi Data GPS
PMB-648 GPS Sumber lain Selisih
Dipati Ukur 10736.9109 BT 10736.9119 BT - 0.0010
Gasibu 10737.1229 BT 10737.1226 BT - 0.0003
Cianjur 10705.8682 BT 10704.8681 BT 10708 BT 0.0001
Cimahi 10732.5134 BT 10732.5130 BT 10729 BT 0.0004
Alun-alun Bandung
10736.3359 BT 10736.3358 BT 10735 BT 0.0001
Berdasarkan data hasil pengujian di atas diperoleh perbedaan koordinat
beberapa kota berdasarkan pengujian GPS PMB-648, USB GPS, dan koordinat
berdasarkan sumber lain. Dalam tabel 4.4 dan tabel 4.5 juga dapat dilihat selisih
36
2. Analisa data kompas HM55B
Tabel 4.6. Data hasil uji akurasi kompas
Arah HM55B Kompas Analog Selisih
Utara
Berdasarkan tabel hasil pengujian diperoleh selisih atau perbedaan sekitar
10° sampai 15° antara kompas HM55B dengan kompas analog. Diperlukan
perhitungan tambahan agar arah pada kompas analog dan arah pada kompas
digital sesuai.
4.3.2Analisa Data Pengujian Alat terintegrasi
Berdasarkan data pada tabel 4.3 diperoleh selisih antara besar sudut arah
kiblat yang ditunjuk oleh alat penentu arah kiblat yang telah dirancang dengan
besar sudut arah kiblat pada beberapa mesjid di kota Bandung yaitu sekitar 1°
sampai 2°.
4.3.3Analisa perhitungan sudut arah kiblat
Berdasarkan data yang dihasilkan dari GPS dapat dilakukan perhitungan
matematis yang nantinya menghasilkan sebuah sudut yang dijadikan sebagai
acuan bagi motor untuk bergerak menuju ke arah kiblat.
Analisa perhitungan matematis berdasarkan data yang dihasilkan GPS
adalah sebagai berikut :
Dengan menggunakan rumus arcus tangen (arctan) dapat diperoleh besaran
sudut arah kiblat. Berdasarkan data keluaran GPS dan data koordinat ka’bah maka
dapat diketahui panjang garis yang diperlukan dalam perhitungan sudut arah
kiblat menggunakan arctan. Garis X diperoleh dari rumus pengurangan data bujur
(longitude) pengguna dikurangi data bujur ka’bah. Garis Y diperoleh dari rumus
37
ternyata pengguna berada pada koordinat lintang selatan atau bujur barat maka di
depan data koordinat tersebut harus ditambahkan tanda ”-“.
Ka’bah berada di koordinat 21.2525° LU dan 39.4939° BT sedangkan
koordinat user berada di jalan dipati ukur tepatnya di koordinat 06.5320° LS dan
107.3691° BT, karena user berada di koordinat lintang selatan, maka ditambahkan
“-“ didepan data koordinat tersebut. Bedasarkan data koordinat tersebut maka
dilakukan perhitungan sebagai berikut:
X = 107.3691 - 39.4939
X = 67.88
Y = -6.5320 - 21.2525
Y = -27.78
Gambar 4.1. Perhitungan sudut
7DQĮ
7DQĮ
7DQĮ - 0.4092
38
Berdasarkan hasil perhitungan diperoleh sudut sebesar 22.25° yang
merupakan sudut dari arah barat menuju arah kiblat.
Untuk perhitungan di daerah lain, misalkan di kota Cimahi:
X = 107.33 - 39.49
X = 67.84
Y = - 6.52 - 21.25
Y = -27.77
7DQĮ
7DQĮ
7DQĮ -0.4093
$UFWDQĮ -22.2615°
Setelah dilakukan perhitungan ternyata kiblat diantara kota Cimahi dan jalan
39
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan pengujian dan analisa yang dilakukan pada sistem yang telah
dirancang, dapat diperoleh kesimpulan :
1. Sistem penentu arah kiblat portable berbasis mikrokontroler telah berhasil diaplikasikan.
2. Berdasarkan data hasil pengujian dan mengacu pada beberapa sumber,
koordinat lintang dan bujur setiap kota berbeda-beda sehingga dengan adanya
sistem penentu arah kiblat yang telah dirancang dapat diketahui koordinat user
yang lebih tepat.
3. Berdasarkan data yang dikeluarkan oleh GPS dapat dilakukan perhitungan
matematik untuk mencari derajat sudut arah kiblat.
4. Berdasarkan data pada tabel 4.6 terdapat perbedaan pada data kompas analog
dan data kompas digital. Sehingga perlu adanya perhitungan pada program
kompas digital agar data kompas digital sesuai dengan data kompas analog.
5. Berdasarkan data pada tabel 4.3 terdapat selisih antara besar sudut arah kiblat
antara alat yang dirancang dengan sudut arah kiblat pada beberapa mesjid di
kota Bandung yaitu sekitar 1° sampai 2 °.
5.2 Saran
Perancangan sistem penentu arah qiblat ini masih jauh dari kata sempurna
dan masih memiliki banyak kekurangan. Perlu adanya pembelajaran lebih lanjut
demi menghasilkan perancangan sistem penentu arah kiblat yang lebih baik.
Adapun saran yang dapat dijadikan bahan pertimbangan untuk pengembangan
sistem penentu arah kiblat.
Untuk pengembangan selanjutnya bisa dirancang sistem penentu arah kiblat