iii ABSTRAKSI
Seiring dengan kemajuan teknologi, maka telah menimbulkan dampak yang cukup besar bagi kehidupan masyarakat. Teknologi tersebut telah menuntun manusia ke dalam era teknologi tepat guna, sehingga pemanfaatan waktu yang efisien sangatlah dibutuhkan. Hal ini menyebabkan manusia mengejar segala sesuatu yang memberikan kemudahan dan pelayanan yang memuaskan. Komputer merupakan salah satu dari bentuk teknologi tersebut. Komputer memegang peranan yang sangat besar dan penting dalam berbagai kehidupan manusia. Komputer itu sendiri dapat membantu mempermudah dan mempercepat kinerja seseorang dalam melakukan tugasnya.Hanya saja diperlukan pengembangan lebih lanjut untuk menggunakan teknologi tersebut.
Selama ini pelaksanaan tugas atau pekerjaan yang sifatnya rutin dan sistem pengamanan tempat penyimpanan barang berharga seperti safe deposit dikendalikan secara manual dengan unsur manusia sebagai pelaksananya. Padahal manusia memiliki sifat lupa bahkan cenderung malas untuk melakukan suatu pekerjaan yang sifatnya rutin. Apalagi jika harus mengendalikan peralatan-peralatan yang berada diluar jangkauan manusia misalnya yang berada dalam ruang gas beracun.
iv
v DAFTAR ISI
halaman
ABSTRAKSI ………. iii
DAFTAR ISI ……….. iv
BAB I. PENDAHULUAN ………...………..……….. 1
1.1. Latar Belakang ……….……….. 1
1.2. Tujuan ……….. 2
1.3. Ruang Lingkup ……….. 2
1.4. Metodologi Penelitian ……….. 3
1.5. Sistematika Penulisan Tugas Akhir ……… 4
BAB II. LANDASAN TEORI ………..……… 6
2.1. Sistem Prosesor Utama ……….……….. 6
2.2. Pemancar ………...……….. 16
2.3. Penerima ……….……… 22
2.4. Catu Daya ……….. 25
2.5. Penggunaan Bahasa Assembler ……….. 26
BAB III. PERANCANGAN DAN PEMBUATAN SISTEM …. 30 3.1. Perancangan dan Pembuatan Perangkat Keras ……… 30
3.2. Komputer PC dan Perangkat Lunak ……… 32
3.2. Pembuatan Program ………..……… 33
vi
4.1. Saran ……… 39
DAFTAR PUSTAKA ……… 40
viii
1.5. Sistematika Penulisan Tugas Akhir ………... 4
BAB II LANDASAN TEORI ... 6
2.1. Sistem Prosesor Utama ………..……….. 6
2.2. Pemancar ……… ... ……… 16
2.3. Penerima ………. ..………... 22
2.4. Catu Daya ……… 25
2.5. Penggunaan Bahasa Assembler ……….. 26
BAB III PERENCANAAN DAN PEMBUATAN SISTEM ... 30
3.1. Perencanaan dan Pembuatan Perangkat Keras ……… 30
3.3. Pembuatan Program …………... 33
BAB IV PENGUJIAN SISTEM ... 38
4.1. Pendahuluan ………. 38
4.2. Pengujian Sistem Pengendali ……… 39
BAB V KESIMPULAN DAN SARAN ……… 44
5.1. Kesimpulan ……… 44
1
I. PENDAHULUAN
1. 1. Latar Belakang Permasalahan
Perkembangan ilmu pengetahuan dan teknologi dibidang elektronika dimana komputer semakin menunjukkan kemajuan yang pesat. Sehingga dapat dengan mudah dimanfaatkan untuk mengatur suatu sistem kerja dari suatu peralatan secara otomatis. Kemajuan yang telah dicapai tersebut menjanjikan harapan dan jaminan kualitas hidup yang lebih baik di masa depan.
Dengan kemajuan ilmu pengetahuan dan teknologi tersebut adalah merupakan sifat manusia untuk senantiasa mencari cara - cara yang dapat memudahkan dan mempercepat pelaksanaan tugas-tugas yang harus dikerjakannya, terutama tugas-tugas yang bersifat rutin. Dewasa ini era komputerisasi semakin dominan dimana banyak peralatan yang dihubungkan dengan komputer, Dimana mempunyai tujuan untuk mempermudah manusia dalam melaksanakan suatu tugas. Salah satunya yaitu membentuk suatu sistem pengaman menggunakan kunci jarak jauh berkode dengan minimum system 8088.
1.2. Permasalahan
Rumusan masalah pada penelitian ini adalah : “Bagaimana merancang dan membuat suatu sistem pengaman menggunakan kunci jarak jauh berkode dengan minimum system 8088. “
1.3. Tujuan Penelitian
Pembuatan alat ini disebabkan untuk mempermudah manusia dalam melakukan kegiatan sehari-hari yang sifatnya rutin. Selain itu dapat diaplikasikan untuk mengendalikan peralatan-peralatan yang berada diluar jangkauan manusia misalnya yang berada dalam ruangan berisi gas beracun. Kemungkinan aplikasi lain adalah untuk mengamankan tempat-tempat penyimpanan barang berharga yang hanya boleh dibuka oleh orang-orang tertentu seperti lemari besi ( safe deposit ). Karena dibandingkan dengan kunci dengan nomor kode mekanik kunci ini lebih aman , karena nomor kodenya yang terdiri dari 4 digit dapat diubah setiap kali dianggap perlu, setiap digit kode dapat bervariasi dari 1 sampai 9, sehingga seluruhnya ada 94 = 6561. Sehingga tak perlu khawatir karena rahasia kodenya dijaga dengan baik. Selain itu juga dapat bekerja lebih cepat dibandingkan dengan kunci nomer kode mekanik.
3
minimum system 8088 yang dapat membantu mempermudah manusia dalam melakukan kegiatan sehari-hari yang sifatnya rutin. “
1.5. Ruang Lingkup dan Batasan Permasalahan
Dalam pembatasan teori, penekanan diarahkan kepada teori-teori yang berkenaan langsung dengan perencanaan dan pembuatan sistem, sehingga isi buku menjadi ringkas tapi padat dan terarah. Sedangkan dalam Perencanaannya dibatasi untuk pembuatan sistem yang membahas mengenai cara kerja dari sistem pendukung yang meliputi bagian pemancar yang berfungsi sebagai anak kunci dan sebuah penerima, dan sebagai medium pengiriman sinyal digunakan sinar infra merah. Medium lain dapat juga dipertimbangkan seperti gelombang radio, tetapi gelombang radio dapat mengganggu pesawat radio dan televisi yang berada disekitar pemancar dan juga frekuensi pemancar harus selalu tepat sama dengan penalaan penerima. Karena jika frekwensi pemancar atau penalaan penerima bergeser kunci jarak jauh tidak dapat berfungsi lagi. Walaupun sinar inframerah memiliki kelemahan, yaitu lintasan berkasnya tidak boleh terhalang oleh benda yang tidak tembus cahaya intramerah. Selain itu, berkas sinar inframerah yang dikirim pemancar juga harus mengenai lubang kunci penerima. Tetapi problem terakhir ini dapat diatasi dengan relatif mudah dan sedikit latihan.
1.6. Metodologi Penelitian
Penelitian terhadap kelayakan perancangan dan pembuatan perangkat keras maupun perangkat lunak dilakukan melalui studi kepustakaan dari berbagai macam buku literatur. Dengan cara ini didapatkan konsep-konsep yang bersifat teori, data, dan informasi dari buku-buku literatur yang ada yang sangat mendukung dituangkannya ide yang menjadi suatu karya yang layak dan mampu untuk diwujudkan.
Penelitian yang berdasarkan pada teori, data-data dan informasi yang ada menjadi pedoman bagi peneliti untuk melakukan perancangan dan pembuatan perangkat keras yang dikehendaki. Setelah perangkat keras selesai dibuat, dilakukan pengujian terhadapnya dengan menggunakan program-program terbatas, kemudian setelah perangkat keras bekerja dengan baik, dibuat program atau perangkat lunak yang digunakan untuk mengendalikan operasi perangkat keras sesuai dengan permasalahan yang dikehendaki.
5
1.7. Sistematika Laporan Penelitian
Dalam penyusunan Penelitian ini, sistematika pembuatan Laporan Penelitian diatur dalam 6 bab dan terdiri dari beberapa Sub Bab.
Adapun Sistematika Laporan Penelitian dapat diuraikan sebagai berikut : BAB I : PENDAHULUAN
Pada bab pendahuluan ini dijelaskan tentang latar belakang permasalahan. Permasalahan, tujuan gagasan, pembatasan masalah sehingga pembahasan masalah tetap relevan dalam batasan tertentu, metedologi penelitian yang menjelaskan awal perencanaan hingga terwujudnya gagasan dari peneliti, serta sistematika pembahasan penelitian sebagai ringkasan materi masing-masing bab.
BAB II : LANDASAN TEORI
Pada bab ini dijelaskan berbagai komponen penting, sarana pendukung yang digunakan serta teorema yang mendukung peneliti dalam perencanaan dan desain sistem perangkat keras maupun perangkat lunak sehingga bekerja sesuai dengan yang diharapkan.
BAB III : ANALISA DAN PEMECAHAN MASALAH
Pada bab ini membahas mengenai penganalisaan masalah yang terwujud sehingga timbul gagasan dari peneliti, dan pemecahan dari permasalahan yang timbul.
Dalam bab ini dibahas mengenai perencanaan sistem dan pembuatan perangkat keras juga perangkat lunak secara keseluruhan untuk memecahkan masalah yang dihadapi.
BAB V : PENGUJIAN SISTEM
Pada bab ini membahas mengenai spesifikasi dan pengujian perangkat keras serta cara kerja dari perangkat lunak yang dibuat.
BAB VI : KESIMPULAN DAN SARAN
6
BAB II
LANDASAN TEORI
2.1. Sistem Prosesor Utama
Dalam desain model - model I/O yang akan dibuat, sistem prosesor utama
merupakan rangkaian yang utama dalam proyek mikroprosesor. Sistem prosesor
utama ini disebut juga minimum sistem. Sistem prosesor utama ini terdiri dari :
* Prosesor Intel 8088
* Rangkaian Memori
* Rangkaian Clock 8284
* PPI dan Latch
2.1.1 Prosesor Intel 8088
Mikroprosesor 8088 merupakan modifikasi dari 8086. Bedanya, 8088 hanya
memiliki lebar data 8 bit, sehingga disebut mikroprosesor 8 bit, sedangkan 8086
mempunyai lebar data 16 bit namun mempunyai kemampuan yang sama dengan
8088. Kedua mikroprosesor tersebut memiliki lebar alamat 20 bit sehingga lokasi
memori yang dapat dihubungkan adalah 2 20 = 1 Mbyte.
Seperti disebutkan diatas,8088 dapat berhubungan dengan 2 20 (1.048.576 = 1
Mbyte) lokasi memori, yaitu dari lokasi 00000H sampai FFFFFH. Masing-masing
lokasi berisi data 8 bit ( 1 byte). Jika mikroprosessor (µp) berhubungan dengan
melalui segmen register (cara segmentasi). Contohnya, alamat absolut awal suatu
program adalah 60000H. Karena bahasa mesin ( dalam bentuk kode heksadesimal )
program bersifat instruction fetch, maka penulisan / penunjukkan lokasi awal
program melibatkan register CS dan IP.
Misalnya pada program itu isi register CS = 52B9H (base addres). Untuk
menunjukkan lokasi memori 60000H, IP harus berisi D470H ( logical, effective,
atau offset address). Cara penulisannya adalah CS:IP (base:effective address) atau
52B9:D470.
Jika dua program menggunakan alamat absolut yang sama untuk menyimpan
data yang berbeda, kedua program tersebut akan bertabrakkan sehingga tidak dapat
bekerja sesuai dengan yang diharapkan.
Pengambilan dan pengerjaan (eksekusi) instruksi hanya melibatkan register
dan alamat offset yang disimpan di register IP. Alamat absolut pada operasi stack
ditunjukkan dengan gabungan isi SS dan SP (SS:SP). Pada operasi data secara
default, digunakan alternate segment ( CS, ES, dan SS) untuk pengolahan data,
diperlukan cara-cara khusus yang disebut segment override.
2.1.2. Register Internal 8088
Mikroprosesor 8088 mempunyai 4 golongan register, yaitu :
1. Flag Register
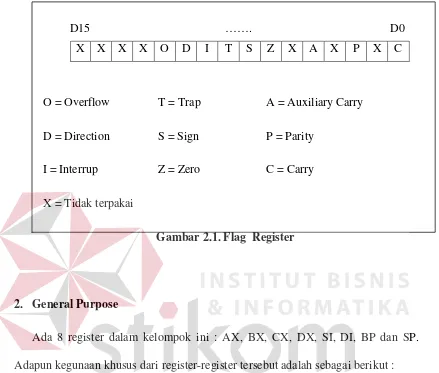
Flag register 8088 terdiri atas 16 bit data. Letak masing-masing bit
8
D15 ……. D0
X X X X O D I T S Z X A X P X C
O = Overflow T = Trap A = Auxiliary Carry
D = Direction S = Sign P = Parity
I = Interrup Z = Zero C = Carry
X = Tidak terpakai
Gambar 2.1. Flag Register
2. General Purpose
Ada 8 register dalam kelompok ini : AX, BX, CX, DX, SI, DI, BP dan SP.
Adapun kegunaan khusus dari register-register tersebut adalah sebagai berikut :
− Register AX
Nama lain dari register ini adalah akumulator. Register ini senantiasa
dipakai untuk operasi perkalian dan pembagian, dan mungkin adalah register
yang paling efisien untuk operasi aritmetika, logika, dan pemindahan data.
− Register BX
Sifat khusus register BX adalah kemampuan untuk menunjuk lokasi memori
penunjukkan lokasi memori melalui register BX adalah relatif terhadap register
DS.
− Register CX
Kegunaan khusus register CX adalah sebagai pencacah untuk program yang
melakukan looping.
− Register DX
Register ini adalah satu-satunya register yang dapat mencatat lokasi I/O
untuk transfer data ke dan dari lokasi I/O. Disamping kemampuan ini, register
DX juga dipakai untuk proses perkalian dan pembagian 32 bit.
− Register SI
Kemampuan register ini hampir sama dengan register BX, namun melalui
perintah khusus register ini dapat berbuat lebih banyak dibandingkan dengan
register BX.
− Register DI
Kegunaan register ini hampir sama dengan kegunaan register SI.
− Register BP
Kegunaan register ini hampir sama dengan kegunaan register BX, SI dan DI.
Namun tidak seperti BX, SI dan DI yang menunjukkan lokasi memori relatif
terhadap DS (Data Segment), penunjukkan register BP adalah relatif terhadap
10
− Register SP
Register ini digunakan pada operasi stack. Operasi stack dapat kita
bayangkan sebagai tumpukkan piring. Piring ( dalam µP adalah data ) terakhir
diletakkan ditempat paling atas. Jika hendak mengambil piring (data), maka
harus mengambil piring (data) yang paling atas, yaitu piring (data) terakhir yang
ditumpuk. Piring (data) ditumpuk (PUSH) paling akhir, akan diambil (POP)
pertama kali (Last In, First Out).
3. Instruction Pointer
− Register IP
Isi register ini menunjukkan alamat perintah yang akan dikerjakan (Execute)
oleh µP (mikroprosesor).
4. Segment Register
Terdapat empat buah segment register, yaitu CS, DS, ES, dan SS, yaitu :
− Register CS
Bersama dengan IP, yaitu CS:IP, menunjukkan lokasi perintah yang akan
dikerjakan oleh µP.
− Register DS
Menunjukkan alamat awal segment data. Cara penunjukkan lokasi data
− Register ES
Seperti tersirat pada namanya, extra segment, kegunaan khusus register ini
tidak ada. Dengan cara-cara tertentu register ini dapat digunakan untuk
sembarang tujuan.
− Register SS
Bersama dengan SP, yaitu SS:SP, register ini menunjuk data yang akan
diambil pada operasi stack.
2.1.3. Rangakaian Memori
Seperti yang telah di ketahui, memori pada komputer terdiri atas dua
macam yaitu RAM dan ROM. RAM ( Random Acces Memory ) adalah jenis
memori yang mampu menyimpan data selama daya dalam keadaan hidup. Jika daya
dimatikan, data yang disimpan dalam RAM akan hilang, jadi RAM merupakan
tempat menyimpan memori sementara. Kita dapat membaca maupun menulis data
ke RAM.
ROM ( Read Only Memory), merupakan memori yang hanya dapat
dibaca saja. Berbeda dengan RAM, memori pada ROM tetap tersimpan walaupun
daya dimatikan. ROM terbagi menjadi tiga macam, yaitu PROM, EPROM, dan
EEPROM.
PROM ( Programmable Read Only Memory ) adalah jenis ROM yang
hanya dapat diisi sekali saja. Hal ini tentunya tidak menguntungkan apabila salah
12
EPROM ( Erasable Programmable Read Only Memory) adalah jenis ROM yang
dapat diisi atau dihapus datanya. Dengan menggunakan EPROM ini tidak perlu
terlalu khawatir, jika data yang dimasukkan ternyata salah, karena dapat
menghapusnya dan mengisinya kembali. Untuk menghapus data pada EPROM ini
digunakan sinar ultra violet. Jenis ketiga dari ROM adalah EEPROM (Electrically
Erasable Programmable Read Only Memory). EEPROM ini tidak berbeda jauh
dengan EPROM, hanya cara penghapusannya berbeda. Pada EPROM,
penghapusan dilakukan dengan bantuan sinar violet, sedangkan pada EEPROM
dipakai tegangan. Untuk menghapus data, EEPROM ini mempunyai lebih banyak
kemudahan dibandingkan dengan EPROM. Salah satu contoh adalah kita tidak
perlu mengeluarkan IC tersebut untuk dihapus, kita cukup memberikan tegangan.
Namun kendala EEPROM adalah harganya yang masih tinggi. Dilihat dari segi
biaya inilah kita lebih cenderung untuk memilih EPROM.
Rangkaian memori yang digunakan dalam minimum sisterm ini terdiri dari dua
yaitu :
EPROM IC2764 dengan alamat FE000h sampai FFFFFh
RAM IC6116 dengan alamat 00000h sampai 007FFh
2.1.4. Programmable Input/Output 8255
Transfer data secara parallel merupakan transfer data yang paling relatif
lebih mudah dan lebih cepat dibandingkan transfer data secara serial. Transfer data
a. Simple I/O
Contoh transfer data kelompok ini adalah jika akan
mengeluarkan data ke peraga LED ( 0=LED mati, 1 = LED hidup), atau
untuk memasukkan data dari thermostat sederhana, yang senantiasa ada
dan siap digunakan. LED atau thermostat tidak memerlukan sinyal-sinyal
khusus yang menandakan telah terjadi transfer data.
b. Simple Strobe I/O
Ada kalanya data valid pada rangkaian luar hanya ada pada
saat itu juga. Contohnya adalah data keyboard. Data hanya ada jika
keyboard ditekan. Pada saat ditekan, keyboard mengeluarkan sinyal
strobe yang menandakan adanya data valid di rangkaian output. Dengan
adanya sinyal strobe ini, mikroprosesor dipersilahkan untuk mengambil
data valid yang tersedia.
c. Single Handshake I/O
Contoh transfer data jenis ini adalah printer paralel.
Mikroprosesor mengeluarkan sinyal strobe ke printer, jika siap printer
akan mengeluarkan sinyal pengakuan (acknowledge) telah menerima data
dari mikroprosesor. Sehingga percakapan mikroprosesor dan printer
memberikan suatu protokol jabat tangan (handshake).
d. Double Handshake Data Transfer
Jika koordinasi antara mikroprosesor dan rangkaian periferal
14
antara mikroprosesor dan periferal dapat diibaratkan sebagai percakapan
antara pengirim dan penerima. Pertama, pengirim mengatakan “Anda siap
?” (ditandai STB low) dan penerima menerima dengan menjawab “Saya
siap” (sinyal ACK low ). Selanjutnya, pengirim mengatakan “Inilah data
untuk anda” yang ditandadengan sinyal STB high. Akhirnya penerima
menutup pembicaraan ( sinyal ACK low) seraya mengatakan “Data anda
telah saya terima, terima kasih saya siap menerima data yang lain”.
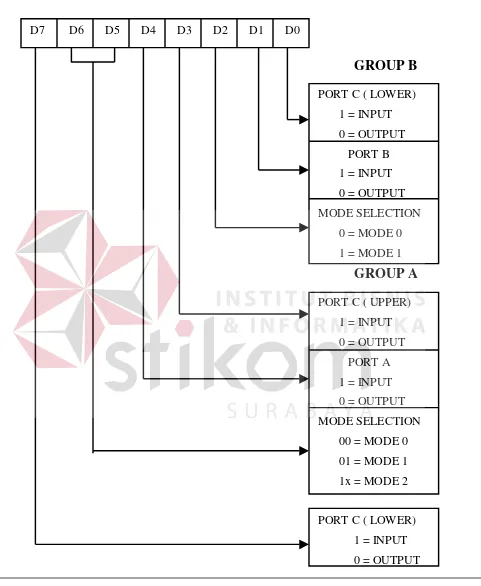
PI/O 8255 dapat di program untuk 3 mode: mode 0, mode
1, dan mode 2. Mode 0 dapat disamakan dengan simple I/O, mode 1
sebagai single handshake, dan mode 2 sebagai double handshake protocol.
PI/O 8255 terdiri atas 3 port, yaitu port A, port B dan port C,
yang dapat diprogram untuk input dan output. Untuk menggunakannya,
terlebih dahulu kita harus menginisialisasikan (memprogram) port-port itu
sebagai output atau sebagai input dan mengirimkannya ke register
16
2.1.5. PPI , Latch dan Buffer
Yang termasuk disini adalah sebagai berikut :
• Penyangga
Untuk memisahkan antara alamat dan data miroprosesor dibutuhkan
penyangga IC 7473 ( untuk bus alamat ) dan IC74245 ( untuk bus data ).
• Kontrol
Semua sinyal kontrol dirancang menggunakan decoder IC74LS138.
Sinyal kontrol untuk memory adalah MEMW, MEMR, CS, sedangkan sinyal
kontrol untuk PPI adalah CS, IOR, IOW. Semua sinyal kontrol adalah ‘Active
Low’.
• Interface
Komunikasi antara sistem prosesor dan modul I/O dapat dilakukan
melalui rangkaian interface PPI IC8255. Total port yang tersedia adalah 24.
• Konektor
Untuk memudahkan hubungan antara sistem prosesor utama dan
modul I/O dipasang pin-pin konektor melalui header (26 pins) dan konektor XT
(62 pins).
2.2. Pemancar
Pemancar ini harus selalu dimiliki atau dibawa oleh sang pemilik, yang
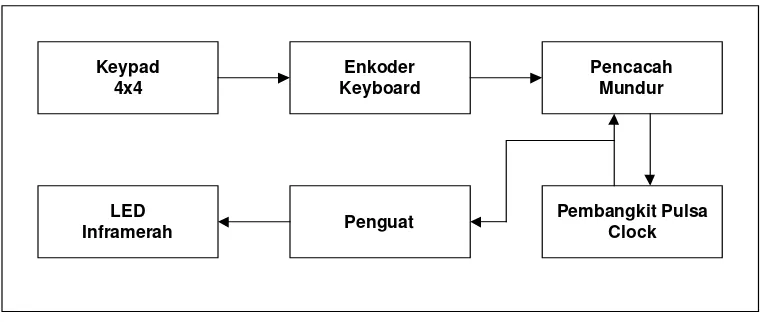
berfungsi sebagai anak kunci.Adapun prinsip kerja dari pemancar ini dapat dilihat
Penjelasan blok diagram diatas adalah sebagai berikut :
a. Keypad 4x4
Keypad pemancar terdiri atas 16 tombol yang diberi nomor 0-15 dan disusun
dalam bentuk deretan 4x4. Yang fungsinya sama dengan keyboard atau remote,
yaitu untuk mengentrikan data yang akan dikirimkan dan diterjemahkan oleh
enkoder keyboard.
b. Enkoder Keyboard
Keluaran Keypad diterjemahkan oleh sebuah enkoder keyboard menjadi biner
yang sesuai dengan nomer yang ditekan. Jika ditekan tombol 7 misalnya, keluaran
enkoder keyboard akan sama dengan 0111 (11 desimal). Yang kemudian diberikan
ke pencacah mundur.
c. Pencacah Mundur
Keluaran enkoder diberikan ke sebuah pencacah yang menghitung turun
( pencacah mundur). Begitu pencacah menerima data masukan dari enkoder
18
keyboard, keluaran borrow dari pencacah ini akan mengeluarkan logika 1. Sinyal
logika 1 ini mengaktifkan sebuah pembangkit pulsa clock, pulsa-pulsa clock yang
dihasilkan oleh pembangkit pulsa diberikan ke masukkan clock pada pencacah
mundur. Karena itu pencacah ini akan mulai menghitung mundur, dimulai dari data
masukan yang diterima dari enkoder keyboard. Pada saat hitungan mundur
mencapai 0000, keluaran borrow pencacah akan berubah menjadi logika 0.
d. Pembangkit Pulsa Clock
Berfungsi untuk menghasilkan pulsa-pulsa clock yang aktif jika pencacah
mundur menghasilkan logika 1,dan akan berhenti jika keluaran borrow pencacah
mundur menjadi logika 0.
e. Penguat
Pulsa-pulsa clock yang dihasilkan oleh pembangkit pulsa clock juga
diberikan pada sebuah penguat yang pada gilirannya dipakai untuk mengaktifkan
LED inframerah.
f. LED Inframerah
LED inframerah akan memancarkan pulsa-pulsa intramerah yang jumlahnya
Sedangkan cara kerja masing masing rangkaian dapat dijelaskan
sebagai berikut :
Jika salah satu tombol keypad ditekan, kolom dan baris dimana tombol itu berada
akan menjadi rendah. Jadi misalnya kita menekan tombol 6, kolom X2 dan baris
Y2 akan menjadi rendah, sehingga X4X3X2X1 akan sama dengan 1011 dan
Y4Y3Y2Y1 sama dengan 1101. Penekanan tombol ini dideteksi oleh enkoder
keyboard 74C922 (IC1, 16 key enkoder) dan diterjemahkan menjadi kode biner.
Untuk penekanan tombol 6, keluaran DCBA dari enkoder akan sama dengan 1011.
Kondensator C2 yang dihubungkan ke pena 5 IC1 diperlukan untuk
melengkapi rangkaian osilator internal IC ini. Osilator ini diperlukan untuk
melakukan penelusuran masukan X1…X4 dan Y1…Y4 guna mendeteksi tombol
keypad yang ditekan. Kondensator C3 pada pena 6 IC1 diperlukan untuk meredam
getaran mekanik (key bounce) yang dapat timbul pada saat sebuah tombol
ditekan. Sebuah register internal didalam IC1 mengingat nomor tombol terakhir
yang ditekan juga setelah tombol ini dilepaskan. Setelah enkoder mendeteksi
tombol yang ditekan, keluaran Data Available (DA) dari IC1 akan menjadi tinggi.
Keluaran tinggi pada data available menyatakan bahwa data masukkan telah
diterima oleh enkoder. Setelah tombol dilepaskan, keluaran data available akan
menjadi rendah.
Keluaran IC1 diberikan kemasukkan data paralel P0…P3 kepencacah 40193
(IC2). IC 40193 (atau 74C193) ini adalah sebuah pencacah maju/mundur 4 bit,
yang untuk pemancar kunci berkode jarak jauh dengan minimum sistem ini
20
kedalam pencacah pada saat masukkan parallel load (PL, pena 11) dibuat rendah,
dan akan disimpan ketika parallel load menjadi tinggi kembali.
Mekanisme yang membuat masukkan parallel load pada IC2 menjadi
rendah, dibentuk oleh resistor R1 dan kondensator C1. Untuk keadaan tetap,
masukkan Parallel load tentu saja akan tinggi, yaitu sama denga Vcc 9 volt.
Setelah enkoder IC1 menerima data masukkan, keluaran data available IC ini akan
menjadi tinggi, dan setelah tombol yang ditekan dilepaskan, keluaran data
pencacah. Hal ini akan menyebabkan keluaran terminal countdown atau keluaran
borrow (TCD, pena 13 ) menjadi tinggi. Sinyal tinggi pada keluaran terminal
countdown ini mengaktifkan pembangkit pulsa clock.
Sebagai pembangkit pulsa clock digunakan sebuah IC 555 (IC3) yang
dirangkai sebagai multivibrator tak stabil. Frekuensi osilasi rangkaian ini ditentukan
oleh aliran R2-R3-C3, dan dapat dihitung dengan rumus f=1/T. Periode T ini
besarnya adalah :
T = 0,693 [C3(R2+R3) +C3R3]
Dengan nilai komponen sesuai dengan gambar, diperoleh f = 424 Hz.
Frekuensi osilasi yang sesungguhnya tergantung pada ketelitian resistor dan
Keluaran TCD dari pencacah dihubungkan dengan pena 4 IC 555. Karena
itu, begitu TCD menjadi tinggi, yaitu sesaat setelah data pada masukkan P0-P3
dimuat ke dalam pencacah, IC 555 akan mulai berosilasi. Keluaran IC 555 (pena 3)
diberikan kemasukkan clock CPD (masukkan clock untuk mencacah mundur,pena
4) pada IC2. Dengan demikian, pencacah akan mulai menghitung turun dimulai dari
data masukkan yang telah diterimanya tadi. Masukkan clock CPU ( masukkan clock
untuk mencacah maju, pena 5 ) yang tidak digunakan, harus dihubungkan dengan
Vcc. Pada saat hitungan mencapai 0000, keluaran TCD akan berubah menjadi
rendah. Sinyal rendah pada TCD ini akan menghentikan ( mereset ) IC 555.
Keluaran IC 555 juga diberikan ke penguat Darlington yang dibentuk oleh
transistor Q1 dan Q2. Jika transistor-transistor ini aktif, LED-LED inframerah
D1…D3 akan menyala dan memancarkan sinar inframerah. Jadi, LED-LED ini akan
memancarkan pulsa-pulsa sinar inframerah yang jumlahnya sama dengan jumlah
pulsa yang dikeluarkan oleh IC 555.
Penguat tiga buah LED dimaksudkan untuk memperoleh pancaran cahaya
yang lebih kuat. Pemasangan kondensator C5 mempunyai tujuan yang sama.
Selama transistor-transistor Q1 dan Q2 tidak aktif, kondensator C5 akan diisi oleh
Vcc. Begitu Q1 dan Q2 aktif, muatan yang tertimbun dalam C5 akan dikosongkan
lewat D1…D3, sehingga memperbesar arus yang mengalir melalui LED-LED ini.
Pemancar ini mendapat daya dari sebuah baterai 9 V. Dengan demikian
alat ini dapat dibawa dengan mudah dan dipegang dengan tangan pada waktu
22
2.3. Penerima
Penerima adalah merupakan alat yang ditempatkan dibalik pintu yang
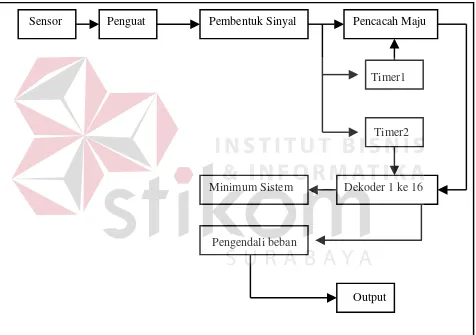
dikunci. Yang prinsip kerjanya dapat dijelasakan berdasarkan bentuk diagram
sebagai berikut ini :
Sensor Penguat Pembentuk Sinyal Pencacah Maju
Timer1
Timer2
Minimum Sistem Dekoder 1 ke 16
Pengendali beban
Output
Gambar 2.4. Diagram Blok Penerima Kunci Berkode Dengan Minimum
a. Sensor
Pulsa-pulsa inframerah yang dikirim oleh pemancar diterima oleh sebuah
sensor yang terdapat pada penerima. Sensor ini ( fotodioda ) mengubah pulsa-pulsa
sinar inframerah menjadi pulsa-pulsa listrik negatif.
b. Penguat
Pulsa-pulsa sinar inframerah yang menjadi pulsa-pulsa listrik negatif ini
diteruskan ke masukkan inverting penguat operasi yaitu IC TL092, keluaran
op-amp ini akan berupa sebuah pulsa positif.
c. Pembentuk Sinyal
Pulsa keluaran op-amp diteruskan ke pemicu Schmitt IC 40106 untuk
diperbaiki bentuknya.
d. Pencacah Maju
Keluaran rangkaian pembentuk sinyal diberikan ke pencacah naik , dengan
demikian pencacah itu menghitung jumlah pulsa yang diterima sensor. Keluaran
rangkaian pembentuk sinyal tersebut juga digunakan untuk memicu dua buah
pewaktu satu tembakan (one shottimer).
e. Timer 1
Timer 1 yaitu sebuah IC 555 yang dirangkai sebagai multivibrator
monostabil. Keluaran pewaktu satu digunakan untuk me-reset pencacah maju,
begitu pencacah selesai menghitung pulsa untuk satu digit yang diterima oleh
24
f. Timer 2
Keluaran pewaktu 2 digunakan untuk untuk mengaktifkan rangkaian
dekoder 1-ke-16 setelah keluaran pencacah maju menjadi stabil. Jika keluaran
pencacah maju sudah stabil maka akan diberikan ke masukkan dekoder.
g. Dekoder 1 ke 16
Masukkan dari pencacah maju ini akan mengaktifkan nomor keluaran yang
sesuai dengan data masukan, atau sama dengan jumlah pulsa yang diterima oleh
sensor. Nomor keluaran dekoder yang diaktifkan dapat digunakan untuk membuka
/ menutup pintu atau mengendalikan peralatan lainnya. Jika digunakan untuk
peralatan lainnya, keluaran dekoder yang digunakan perlu diberikan pengendali
beban.
h. Minimum Sistem
Minimum sistem yang merupakan prosesor utamanya. Dari rangkaian
minimum sistem ini output akan aktif sesuai dengan program yang telah dibuat dan
di simpan dalam EPROM. Jika data yang dikirimkan oleh pemancar sama dengan
data yang ada dalam program, mekanik pembuka pintu akan diaktifkan sehingga
pintu akan dibuka, dan jika kedua data tidak sama dengan dekode yang telah
ditentukan sehingga yang diaktifkan adalah rangkaian alarm.
i. Pengendali beban
Yaitu rangkaian yang mengendalikan relay untuk peralatan yang
j. Output
Yaitu rangkaian output yang terdiri dari pembuka pintu, penutup pintu,
alarm, dan lampu.
2.4. Catu Daya
Agar SPU dan modul I/O dapat bekerja, diperlukan rangkaian/sistem catu
daya., yang dapat menghasilkan tegangan catu +5 VDC dan +9VDC. Tegangan
sekunder transformator Tr1 sebesar 12V IC-IC regulator mendisipikasikan panas
cukup besar. Karena itu, IC-IC ini harus diberikan keping pendingin (hink sink)
secukupnya. Kondensator C1 dan C2 diperlukan untuk mencegah agar regulator
tegangan tidak berisolasi sendiri. Sedangkan kondensator C3 dan C4 diperlukan
untuk mengurangi derau (noise) frekuensi tinggi pada keluaran rangkaian catu daya.
• Trafo, berfungsi menurunkan tegangan tinggi AC, 220V atau 110V,
menjadi tegangan rendah AC, misal: 3V, 6V, 12V.
• Diode bridge, merupakan komponen penyearah. Berfungsi mengubah
tegangan AC dari trafo, menjadi tegangan DC.
• Kapasitor, berfungsi menghaluskan tegangan DC yang dihasilkan oleh
Diode bridge.
• Pengatur tegangan. Karena mikroprosesor dan komponen-komponen lain
pada SPU membutuhkan supply tegangan 5 VDC, maka digunakan LM7805
yang mampu menghasilkan output 5 VDC yang stabil dan untuk 9 VDC
26
• Penguat arus. Arus output yang dihasilkan IC 7805 kurang memadai untuk
memenuhi kebutuhan SPU dan modul I/O. Untuk itu perlu ditambah penguat
arus yaitu transistor TIP 2955.
• Tegangan sekunder transformator Tr1 sebesar 12V IC-IC regulator
mendisipikasikan panas cukup besar. Karena itu, IC-IC ini harus diberikan
keping pendingin (hink sink) secukupnya. Kondensator C1 dan C2 diperlukan
untuk mencegah agar regulator tegangan tidak berisolasi sendiri. Sedangkan
kondensator C3 dan C4 diperlukan untuk mengurangi derau (noise) frekuensi
tinggi pada keluaran rangkaian catu daya.
2.5. Penggunaan Bahasa Assembler
Bekerja dengan program DEBUG memang jauh lebih sederhana
dibandingkan jika kita memakai program assembler. Namun, untuk program yang
panjang dan rumit, bekerja dengan DEBUG sangatlah tidak memadai.
Ada dua tahap dalam pemakaian Turbo Assembler, yaitu :
1. Assembling.
• Text editor
Text editor dapat dilakukan dengan menggunakan SideKick
bagian Notepad, Norton Editor, WordStar bagian Non Document
serta word processor lain yang mempunyai fasilitas pembuataan
ASCII file seperti Word Perpect, SPRINT dan lain-lain. Bila
ternyata tidak memiliki software-software diatas dapat juga
Pascal untuk dimanfaatkan sebagai text editor, namun yang perlu
diperhatikan, bila menggunakan editor Turbo c atau Turbo Pascal.
Extension file yang disimpan harus selalu diakhiri dengan .ASM
bukan .PAS atau .C.
• Compiler
Yang dimaksud dengan Compiler adalah suatu program
yang menterjemahkan Program Assembler dalam ASCII file
(berextension .ASM) ke bentuk file object (berextension .OBJ). Dan
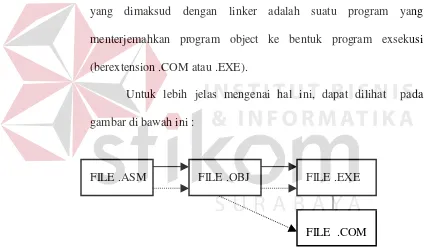
yang dimaksud dengan linker adalah suatu program yang
menterjemahkan program object ke bentuk program exsekusi
(berextension .COM atau .EXE).
Untuk lebih jelas mengenai hal ini, dapat dilihat pada
gambar di bawah ini :
FILE .ASM FILE .OBJ FILE .EXE
FILE .COM
Gambar 2.5. Langkah Pembuatan File Exsekusi
Pada gambar 2.5. ada 2 macam garis, yaitu garis yang
terputus-putus dan garis yang lurus yang masing-masing
28
dipakai saat ini. Yaitu Microsoft Macro Assembler ( garis lurus) dan
Turbo assembler ( Garis terputus-putus).
Yang kemudian akan dibuat menjadi .COM file atau .EXE file.
Caranya :
Ketik : TASM a: namafile a:
Nama file (terletak di drive A dan harus berekstensi.asm,
program turbo assembler terletak di drive c). File .OBJ akan
disimpan di drive A (huruf a: kedua).
Misalnya :
CS:IP. Program berekstensi. COM mempunyai banyak keterbatasan.
= 100. Alamat sebelumnya CS:00 hingga CS:IP digunakan untuk PSP
(Program Segment Prefix), yaitu bagian program yang mengatur kerja file
.COM. Alur kerja PSP ditentukan oleh versi DOS yang kita gunakan.
Keterbatasan lain adalah program ini hanya mempu menempati 1 segment
saja, dengan demikian panjang maksimal program adalah 64 Kbyte.
Keterbatasan ketiga adalah kemampuan program yang hanya menempati satu
segment saja membuat kita tidak terlalu bebas menggunakan seluruh
kemampuan PC untuk proyek-proyek percobaan.
Program berekstensi. EXE dapat beroperasi di lebih dari 1 segment,
dengan demikian dapat memanfaatkan seluruh kemampuan µP 8088.
• Menjalankan Linker
Dalam paket Turbo Assembler akan ditemukan sebuah file yang
bernama TLINK.EXE yang berfungsi untuk mengubah format object file
ke .COM file atau .EXE file.
Tata penulisan file ini adalah :
TLINK (/T) [.OBJ FILE ] [(.COM)/.EXE FILE]
Contoh :
TLINK CETAK.OBJ CETAK.EXE
Perintah diatas berfungsi untuk mengubah format dari .OBJ file ke
.EXE file
TLINK/T CETAK.OBJ CETAK.COM
Perintah diatas berfungsi untuk mengubah format dari .OBJ file ke
30 BAB III
PERENCANAAN DAN PEMBUATAN SISTEM
3.1. Perencanaan dan pembuatan Perangkat Keras
Dalam pembuatan kunci jarak jauh dengan menggunakan minimum sistem
8088, digunakan metode pemodelan. Sebab pemodelan lebih mendekati bentuk
sistem yang sebenarnya.
Perencanaan perangkat keras adalah dengan menghubungkan beberapa
peralatan mekanik ke minimum sistem melalui Programable Peripheral Interface
8255 ( PPI 8255 ). Rangkaian ini akan mengaktifkan dan menonaktifkan peralatan
yang terhubung dengan menggunakan sistem pemancar dan penerima.
Minimum sistem menggunakan IC 8255 dan beberapa chip lain sebagai
pendukung interface. Peralatan elektronik lainnya menggunakan rangkaian relay
untuk mengontrol sistem mekanik, dimana relay tersebut digunakan untuk
penggerak sitem pintu, mematikan, menyalakan lampu, dan alarm yang berfungsi
apabila terjadi kesalahan dalam kode yang diinputkan melalui pemancar. Perintah
yang tersimpan dalam EPROM mengendalikan peralatan mekanik melalui PPI 8255
rangkaian kontrol, sesuai dengan yang telah diinputkan oleh pemancar dan akhirnya
akan diterima oleh sistem penerima.
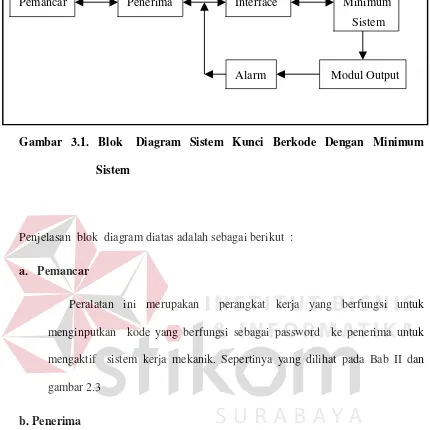
Dalam pembuatan perangkat keras sebagai pengendali sistem, dibuat sesuai
Pemancar Penerima Interface Minimum
Sistem
Alarm Modul Output
Gambar 3.1. Blok Diagram Sistem Kunci Berkode Dengan Minimum Sistem
Penjelasan blok diagram diatas adalah sebagai berikut :
a. Pemancar
Peralatan ini merupakan perangkat kerja yang berfungsi untuk
menginputkan kode yang berfungsi sebagai password ke penerima untuk
mengaktif sistem kerja mekanik. Sepertinya yang dilihat pada Bab II dan
gambar 2.3
b. Penerima
Peralatan ini merupakan perangkat kerja yang berfungsi untuk menerima
kode yang dikirimkan oleh pemancar , dan cara kerjanya dapat dilihat pada
Bab II dan gambar 2.4.
c. Interface
Peralatan interface merupakan jalur input/output yang merupakan sarana
penghubung antara sistem mekanik yang dibuat dengan minimum sistem.
32
d. Minimum Sistem
Minimum sistem digunakan sebagai pusat kendali keseluruhan sistem
sekaligus sebagai tempat pemrosesan data baik yang berupa input maupun
output. Hasil dari pemrosesan data dapat dilihat dari input yaitu berupa me
non-aktifkan dan mengaktifkan pintu, lampu , dan sebagai sistem pengaman
berupa alarm. Yang penjelasannya dapat dilihat di Bab II dan gambar
rangkaian pada lampiran.
e. Model Output
Merupakan output dari rangkaian mekanik yang dibuat sebagai keluaran
dari program, dan pendukung piranti kerja lainnya. Yaitu pembuka dan
penutup pintu, mematikan, dan menyalakan lampu.
f. Alarm
Merupakan rangkaian yang mendeteksi keadaan sistem dari model, dan
outputnya merupakan informasi yang diteruskan ke rangkaian interface.
Apabila kode yang di sampaikan kepada penerima tak sesuai dengan
password yang ada, maka alarm akan berbunyi. Cara kerja bisa dilihat pada
Bab II.
3.2. Komputer PC dan Perangkat Lunak
Komputer yang digunakan yaitu IBM PC compatible yang dalam hal ini
komputer dalam sistem hanya sebagai media untuk membuat perangkat lunak
menggunakan komputer dan EPROM Emulatar yang dihubungkan dengan
minimum sistem. Untuk perangkat lunaknya menggunakan bahasa pemograman
Assembler. Selain itu yang terpenting adalah menentukan letak port yang dihubungkan dengan input maupun output, sehingga baik rangkaian dan program
akan berfungsi sesuai dengan yang diharapkan.
3.3. Pembuatan Program
Prosedur dibawah ini digunakan untuk membuat program yang digunakan
untuk menyelesaikan suatu permasalahan.
Langkah – langkah yang perlu dikerjakan adalah :
1. Mempertimbangkan dan menjabarkan kembali permasalahan, definisi
permasalahan harus dijabarkan secara tepat dalam bentuk detail. Informasi
yang diperlukan seperti skema rangkaian dan gambaran proses harus jelas.
Sehingga output dari input program sesuai dengan tujuan dari dibuatnya
rangkaian kunci berkode dengan minimum sistem tersebut.
2. Menentukan port-port yang digunakan termasuk identifier yang dipakai oleh
input/output.
3. Melakukan uji coba program sebelum program dapat kita fungsikan dengan
tujuan sebenarnya.
34
Adapun prosedur dari program yang di buat adalah sebagai berikut :
1. Input pasword
Jika A = B, maka pintu akan terbuka
Jika A≠ B, maka alarm akan berbunyi
Untuk pasword input sebanyak 4 digit yaitu antara 1 sampai dengan 9
2. Tombol 10 pada keypad pemancar berfungsi untuk memasukkan kode ke
pengunci data ( mirip tombol enter pada keypad komputer )
3. Tombol 11 pada keypad pemancar berfungsi untuk menutup pintu dan mereset
penerima.
4. Tombol 12 sampai dengan tombol 15 berfungsi untuk mengendalikan piranti
lain, dipakai untuk menyalakan dan mematikan lampu.
Tombol 12 digunakan untuk menyalakan lampu A
Tombol 13 digunakan untuk mematikan lampu A
Tombol 14 digunakan untuk menyalakan lampu B
Tombol 15 digunakan untuk mematikan lampu B
Karena yang digunakan adalah IC 8255 pada mode 0 ( untuk A dan B )
dengan konfigurasi sebagai berikut :
Port A : input
Port B : output
Port C Lower : input
Data yang dikirimkan ke control word Ic 8255 adalah sebagai berikut :
D7 D6 D5 D4 D3 D2 D1 D0
1 0 0 1 0 0 0 1
Jadi data control word-nya adalah : 10010001b atau 91h
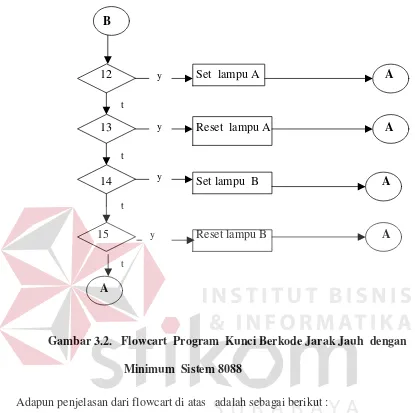
Adapun flowcart dari program untuk mengaktifkan kunci jarak jauh dengan
minimum sistem 8088 yang dibuat adalah sebagai berikut :
36
Gambar 3.2. Flowcart Program Kunci Berkode Jarak Jauh dengan Minimum Sistem 8088
Adapun penjelasan dari flowcart di atas adalah sebagai berikut :
Tombol-tombol yang ditekan pada remote dibaca oleh program. Tombol
tersebut adalah tombol 1 sampai dengan tombol 15.
Pendeteksian yang dilakukan oleh program sesuai dengan flowchart yang
ada, yaitu :
1. Bila tombol yang ditekan adalah tombol 1 sampai dengan tombol 9, maka
program akan menyimpan informasi yang bersesuaian dengan tombol yang
Setiap kali ada tambahan penekanan tombol, semakin panjang informasi atau
password yang disimpan.
2. Bila tombol 10 ditekan, maka program akan membandingkan password yang
diinputkan lewat remote dengan password referensi yang tersimpan didalam
program.
Jika hasil pembanding benar, maka pintu terbuka tetapi jika hasil pembanding
tidak benar maka alarm akan berbunyi dan pintu tetap tertutup.
3. Bila tombol 11 ditekan maka pintu akan menutup dan reset alarm.
4. Bila tombol 12 sampai dengan 15 ditekan, maka piranti –piranti lain akan
diaktifkan atau di nonaktifkan/
Berikut adalah fungsi tiap-tiap tombol :
Tombol 12 digunakan untuk menyalakan lampu A
Tombol 13 digunakan untuk mematikan lampu A
Tombol 14 digunakan untuk menyalakan lampu B
38
BAB IV
PENGUJIAN SISTEM
4.1 Pendahuluan
Sebelum alat digunakan sepenuhnya untuk mengendalikan pelaksanan kontrol
pintu atau keamanan, perlu dilakukan pengujian terlebih dahulu untuk memastikan
alat tersebut bekerja sesuai dengan sistem yang direncanakan.
Dari hasil pengujian alat secara hardware, untuk lebih memusatkan sinar
inframerah yang diterima fotodioda diperlukan lensa berdiameter 90 mm. Dan dari
hasil uji coba diketahui bahwa kunci berkode dapat bekerja dengan baik sampai
jarak 6 meter. Jarak operasi yang agak terbatas ini dapat ditingkatkan antara lain
dengan cara memasang reflektor pada sensor, agar sinar inframerah yang
dipancarkan menjadi lebih terarah dan membentuk suatu berkas yang tajam.
Untuk pengujian software dilakukan dengan menjalankan program
pengendali yang dibuat dengan menggunakan bahasa Assembler yang kemudian
disimpan dalam EPROM. Model I/O akan bekerja apabila mendapatkan input yang
telah dikirimkan oleh pemancar. Dan semua itu bekerja bedasarkan dengan program
4.2 Pengujian Sistem Pengendali
Sistem yang dihubungkan dengan modul mekanik di uji dengan program
yang sebelumnya dibuat dalam bahasa pemograman Assembler melalui personal
komputer atau PC.
Dari pengujian yang diharapkan adalah sebagai berikut :
1. Bila fotodioda penerima tidak menerima sinyal input dari pemancar,
maka sensor akan diset ke nol.
2. Bila fotodioda penerima menerima sinyal input dari pemancar, maka
sensor akan di set sesuai dengan kode input yang diterima.
3. Fungsi dari tiap - tiap tombol pemancar adalah sebagai berikut :
0 = tidak digunakan.
1…9 = Mengirim kode pembuka pintu ( 4 digit )
10 = Memasukan kode pengunci data ( mirip dengan
tombol enter pada keyboard komputer )
11 = Menutup pintu dan me-reset penerima.
12 … 15 = mengendalikan piranti lain.
4. Pembuka pintu akan bekerja isi pengunci data sama dengan data yang
ditentukan, keluaran A = B pada semua komparator akan tinggi
sehingga akan mengaktifkan transistor Q1 Akibatnya relay K1 akan
40
5. Penutup pintu akan bekerja apabila pemancar memberi sinyal yang
mengaktifkan transistor Q5,menyebabkan relay K3 bekerja untuk
mengaktifkan mekanik penutup pintu sekaligus me- reset penerima.
6. Peralatan mekanik alarm bekerja apabila terjadi kesalahan dalam
menginputkan kode pasword yang terdiri dari 4 digit.
7. Peralatan mekanik lainnya ( mematikan dan menyalakan lampu ) akan
bekerja apabila sensor penerima telah mendapatkan sinyal input dari
pemancar. Dan bisa dikembangkan lebih lanjut dengan sistem timer (
lampu akan menyala dan mati pada jam-jam tertentu sesuai dengan
apa yang kita inginkan).
Adapun langkah-langkah pengujian yang dilakukan adalah sebagai berikut :
A. Pemancar
• Yang pertama dilakukan adalah menguji fungsi-fungsi
tombol keypad yang berfungsi atau tidak, jika keypad
berfungsi maka penekanan tombol keypad akan diterima oleh
IC74C922 ( 16 key enkoder) untuk diterjemahkan menjadi
kode biner berupa sinyal aktif hight atau aktif low.
Misalnya penekanan pada keypad 7, maka outputnya adalah
sama dengan 0111 dimana :
Low Hight
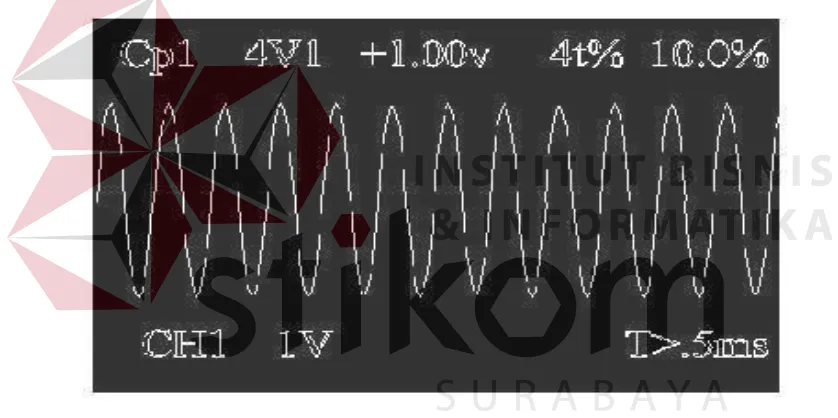
• Data dari IC74C922 diterima oleh sebuah pencacah mundur
yaitu IC40193 dengan bentuk output yang menggambarkan
jumlah sinyal yang dikirimkan ke led infra red untuk
dipancarkan.
Output yang dihasilkan oleh pencacah mundur dan yang
diterima oleh infra red untuk dipancarkan dapat
digambarkan berdasarkan gambar data yang didapat dari
osiloscope adalah sebagai berikut:
CH1 = IC 40193
CH2 = Infra Red
42
• Sebagai Multivibrator tak stabil digunakan IC 555 dan
dikuatkan juga oleh penguat Darlington yang dibentuk oleh
transistor.
Adapun bentuk sinyal reset dari multivibrator tak stabil dapat
digambarkan berdasarkan gambar data yang didapat dari
osiloscope adalah sebagai berikut :
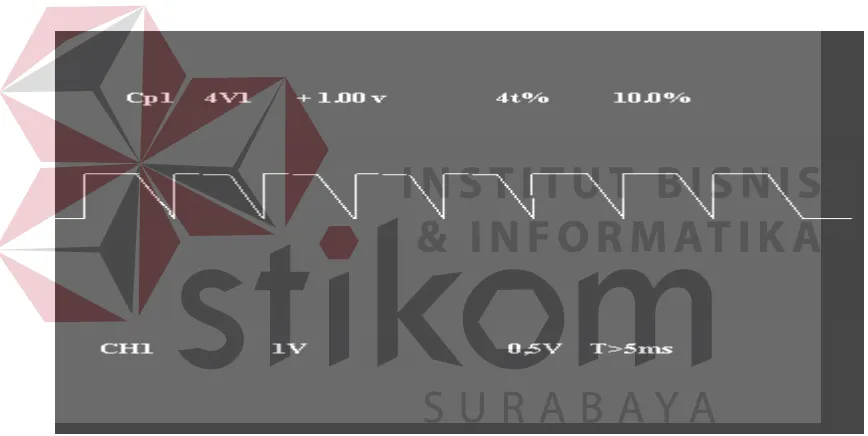
B. Penerima
• Sinyal yang diterima pada titik A sama dengan sinyal yang
dipancarkan oleh pemancar, dapat digambarkan berdasarkan
gambar data yang didapat dari osiloscope adalah sebagai
berikut:
Gambar 4.3. Sinyal Yang di terima Pada Titik A
• Karena pengaruh pada kapasitor / penguat, maka sinyal yang
44
berdasarkan gambar data yang didapat dari osiloscope adalah
sebagai berikut:
Gambar 4.4. Sinyal Pada Rangkaian Pembentuk Sinyal
• Pada pencacah maju sinyal tersebut dihitung sesuai dengan pulsa
yang diterima sensor.
• Pada rangkaian multivibrator monostabil keluaran pewaktu 1
mereset pencacah maju dan keluaran pewaktu 2 mengaktifkan
rangkaian dekoder 1 ke 16 sehingga dapat mengaktifkan nomer
keluaran sesuai data masukkan. Peranan minimum sistem adalah
sebagai prosesor utam yang mengatur dan mengontrol semua
Adapun keuntungan dan kelemahan dari pengujian alat tersebut adalah
sebagai berikut :
a. Keuntungan :
Dapat mengetahui kinerja dari perangkat lunak dan keras sehingga
mengetahui segala kekurangannya
b. Kelemahan :
• Tidak ditemukan letak kesalahan dari fungsi keypad , misalnya jika
ditekan tombol 7 sinyal yang tampak pada osiloscope sebanyak 8
sinyal.
• Keypad nomer 0 tidak berfungsi.
• Kesulitan dalam mencari kecocokan antara led pemancar dan
fotodioda penerima.
• Jarak tempuh yang diharapkan maksimal 6 meter dan minimal
sedekat dekatnya. Hanya dapat mencapai jarak yang minimal.
• CMOS 40193 terlalu sensitif sehingga mudah rusak.
• Perangkat keras tidak dapat berfungsi pada saat listrik padam karena
46
BAB V
PENUTUP
5.1. Kesimpulan
Adapun kesimpulan yang dapat dibuat antara lain :
1. Penggunaan kunci berkode dengan minimum sistem ini lebih aman
dibandingkan dengan kunci yang menggunakan sistem mekanik. Karena kode
dapat diubah setiap waktu dan rahasia kode terjaga dengan baik.
2. Penggunaan medium berupa sinar infra merah walaupun punya kelemahan ,
yaitu lintasan berkasnya tidak boleh terhalang oleh benda yang tidak tembus
cahaya infra merah. Tapi lebih baik dari pada menggunakan medium lain, karena
tidak mengganggu gelombang frekuensi yang lain.
3. Assembler digunakan untuk membuat perangkat lunak dari hardware.
Penggunaan bahasa pemograman Assembler karena lebih sederhana dari pada
dengan program debug, selain itu bahasa Assembler merupakan bahasa
pemograman yang dapat dimengerti oleh perangkat keras yang ada. Selain itu
untuk program yang panjang dan rumit, bahasa pemograman Assembler lebih
5. 2. Saran
Dalam peningkatan dan perbaikan alat perlu di perhatikan :
1. Penyederhanaan desain perangkat keras sehingga penggunaannya lebih
maksimal dan lebih murah.
2. Menggunakan UPS untuk menjaga apabila terjadi pemadaman listrik
perangkat keras yaitu kunci berkode jarak jauh masih dapat bekerja sesuai
DAFTAR PUSTAKA
Arianto Widyatmo, Haryono Eduard, dan Fendy.1994. Belajar Sendiri
Mikroprosesor-Mikrokontroler Melalui Komputer PC.Jakarta. PT Elex
Media Komputindo Anggota IKAPI.
Fairchild Semiconduktor Corp. 1980. CMOS Databook. California.
Jain, R. P. 1991. Modern Digital Electronics. New Delhi. Tata McGraw-Hill
Publishing Company.
Tocci, Ronald J. 1991. DigitalSystems,Principles and Applications. 5/e.
Englewood Cliffs. New Jersey. Prentice Hall Inc.
Ediman Lukito 1991 Dasar-dasar Pemograman Dengan Assembler 8088.