ABSTRACT
ZAHEDI. The Design of Climbing Platform to Monitors Urban Boundary Layer Profile. Supervised by BREGAS BUDIANTO.
The needs of urban boundary layer data availability has become an increasing issue this recent years. By monitoring the real-time urban boundary layer profile, proper strategies to minimise risk of economic loss, environmental and health impacts due to air pollutant dipersion and other weather characteristics can be predicted.In recent cases, many studies of urban boundary layer experienced difficulties to acquire the vertical profile datas because of the intruments insufficientcy to measure such data. This study leads to the development of an instrument carrier platform to measure vertical urban boundary layer profiles (0-100m). Development of this platform uses simple robotics mechanism such h-bridge, debouncer circuit, magnetic sensor circuit, and timer circuit.This platform is able to carry the instrument to certain heights and conduct measurement process to obtain vertical profiles of urban boundary layer.Therefore this platform expected to be a practical and economic solution to obtain urban boundary layer data.
ABSTRAK
ZAHEDI. Perancangan Platform Panjat untuk Pengamatan Profil Urban Boundary Layer. Dibawah bimbingan BREGAS BUDIANTO.
Ketersediaan data profil vertikal urban boundary layer dewasa ini sangat dibutuhkan. Data profil tersebut umumnya digunakan sebagai input model polutan dan model cuaca lainnya untuk mengurangi dan mencegah kerugian pada sektor ekonomi, lingkungan maupun kesehatan. Kendala utama dalam memperoleh data tersebut terletak pada kemampuan instrumen yang telah ada untuk memperoleh data vertikal di beberapa ketinggian. Penelitian ini bertujuan untuk merancang platform yang mampu memfasilitasi pengukuran vertikal pada ketinggian urban boundary layer (0-100m). Pengembangan platform ini menggunakan mekanisme robotik sederhana seperti h-bridge, rangkaian kontrol logic pembalik arah, sensor magnetik dan rangkaian jeda waktu.Platform ini telah mampu mengangkut alat pengukuran pada beberapa ketinggian untuk melakukan pengukuran. Sehingga diharapkan platform panjat ini dapat menjadi solusi yang ekonomis dan praktis untuk melakukan pengamatan urban boundary layer.
I. PENDAHULUAN
1.1 Latar Belakang
Sangat sedikit penilitian mengenai profil dari urban boundary layer yang telah dilakukan disebabkan keterbatasan sumber informasi mengenai karakteristik parameter cuaca pada lapisan permukaan (Rotach et al. 2004). Salah satu diantaranya adalah informasi yang meliputi suhu dan kelembaban. Namun demikian, seringkali ditemukan kesulitan dalam memperoleh profil suhu dan kelembaban secara vertikal pada beberapa ketinggian tertentu. Kendala utama terletak pada kemampuan instrumen dalam melakukan pengukuran secara vertikal akibat keadaan geografis dan jarak yang seringkali dapat menghambat dalam memperoleh informasi tersebut, sehingga dibutuhkan biaya yang relatif mahal untuk menunjang kemampuan alat tersebut seperti membangun sebuah menara pengamat khusus. Oleh karena itu, sangat diperlukan suatu instrumen dengan sistem yang dapat mengukur parameter cuaca di berbagai ketinggian, keadaan geografis dan letak tempuhnya. Dengan demikian, dikembangkan suatu platform pengukur parameter cuaca pada urban boundary layer yang mampu menunjang pengukuran di berbagai ketinggian secara kontinu dengan mengadopsi teknologi robotik sederhana dan sistem telemetri, di mana sistem ini mempunyai kemampuan untuk mengukur parameter cuaca secara vertikal dan melakukan pengukuran dari tempat yang berjauhan. Sehingga dengan platform dan sistem ini diharapkan dapat memberi solusi untuk mendapatkan informasi parameter cuaca tersebut.
1.2 Tujuan
Penelitian ini bertujuan untuk merancang platform yang dapat bergerak vertikal dan mampu mengangkut alat pengukuran untuk mengukur profil urban boundary layer dengan kemampuan telemetri.
II. TINJAUAN PUSTAKA
2.1 Fungsi Pengamatan Profil Urban Boundary Layer
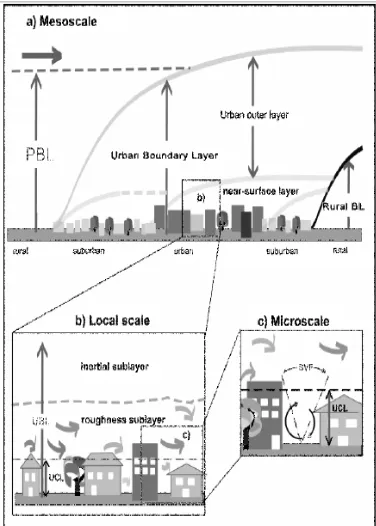
Urban boundary layer telah menjadi suatu studi yang sangat menarik perhatian dewasa ini. lebih dari itu urban boundary layer mempunyai karakteristik struktur tiga dimensi yang rumit sehingga sangat sulit untuk ditelaah secara komprehensif (Rotach et al., 2002). Oke (1987) telah membagi Urban boundary layer kedalam beberapa sublayer secara vertikal yaitu :
Gambar 1 Urban boundary layer (Oke 1987)
¾ Urban Canopy Layer (UCL) berkisar
dari ketinggian permukaan tanah hingga ketinggian rata-rata gedung dan pepohonan.
¾ Inertial sublayer (IS) berada diatas
ketinggian ideal dari gedung dan pepohonan lingkungan perkotaan (Tennekes and Lumely, 1972).
¾ Outer Urban boundary layer
(OUBL)
Merupakan lapisan terluar dari Urban boundary layer.
I. PENDAHULUAN
1.1 Latar Belakang
Sangat sedikit penilitian mengenai profil dari urban boundary layer yang telah dilakukan disebabkan keterbatasan sumber informasi mengenai karakteristik parameter cuaca pada lapisan permukaan (Rotach et al. 2004). Salah satu diantaranya adalah informasi yang meliputi suhu dan kelembaban. Namun demikian, seringkali ditemukan kesulitan dalam memperoleh profil suhu dan kelembaban secara vertikal pada beberapa ketinggian tertentu. Kendala utama terletak pada kemampuan instrumen dalam melakukan pengukuran secara vertikal akibat keadaan geografis dan jarak yang seringkali dapat menghambat dalam memperoleh informasi tersebut, sehingga dibutuhkan biaya yang relatif mahal untuk menunjang kemampuan alat tersebut seperti membangun sebuah menara pengamat khusus. Oleh karena itu, sangat diperlukan suatu instrumen dengan sistem yang dapat mengukur parameter cuaca di berbagai ketinggian, keadaan geografis dan letak tempuhnya. Dengan demikian, dikembangkan suatu platform pengukur parameter cuaca pada urban boundary layer yang mampu menunjang pengukuran di berbagai ketinggian secara kontinu dengan mengadopsi teknologi robotik sederhana dan sistem telemetri, di mana sistem ini mempunyai kemampuan untuk mengukur parameter cuaca secara vertikal dan melakukan pengukuran dari tempat yang berjauhan. Sehingga dengan platform dan sistem ini diharapkan dapat memberi solusi untuk mendapatkan informasi parameter cuaca tersebut.
1.2 Tujuan
Penelitian ini bertujuan untuk merancang platform yang dapat bergerak vertikal dan mampu mengangkut alat pengukuran untuk mengukur profil urban boundary layer dengan kemampuan telemetri.
II. TINJAUAN PUSTAKA
2.1 Fungsi Pengamatan Profil Urban Boundary Layer
Urban boundary layer telah menjadi suatu studi yang sangat menarik perhatian dewasa ini. lebih dari itu urban boundary layer mempunyai karakteristik struktur tiga dimensi yang rumit sehingga sangat sulit untuk ditelaah secara komprehensif (Rotach et al., 2002). Oke (1987) telah membagi Urban boundary layer kedalam beberapa sublayer secara vertikal yaitu :
Gambar 1 Urban boundary layer (Oke 1987)
¾ Urban Canopy Layer (UCL) berkisar
dari ketinggian permukaan tanah hingga ketinggian rata-rata gedung dan pepohonan.
¾ Inertial sublayer (IS) berada diatas
ketinggian ideal dari gedung dan pepohonan lingkungan perkotaan (Tennekes and Lumely, 1972).
¾ Outer Urban boundary layer
(OUBL)
Merupakan lapisan terluar dari Urban boundary layer.
ketiga sublayer tersebut . Pada kondisi adiabatik, gas-gas polutan,aerosol dan partikulat cenderung naik ke atmosfer dan terdispersi. Namun pada kasus inversi suhu, lapisan udara hangat dapat menahan polutan pada lapisan permukaan. Hal ini menyebabkan terjadinya kualitas udara buruk yang dapat berlangsung hingga beberapa jam sampai lapisan inversi terurai. Sehingga diperlukan model pencemaran udara untuk memperhitungkan resiko dan dispersi pencemaran polutan tersebut. Data profil temperatur sangat dibutuhkan sebagai input primer untuk membuat model plume and dispersion dimana pembentukan dan penguraian lapisan inversi pada area tertentu dapat diprediksi dengan pengawasan profil temperatur atmosfer secara real-time, sehingga dampak buruk pada lingkungan dan kesehatan dapat diantisipasi. akan tetapi kebanyakan model pencemaran yang telah dikembangkan hanya mencakup lingkungan non-perkotaan dan tidak menyertakan dispersi polutan pada lapisan Urban Boundary Layer (Rotach, 2001). Beberapa kegunaan data profil Urban boundary layer antara lain :
• Investigasi efek urban heat island • Pengawasan kestabilan atmosfer bandar
udara
• Prakiraan meteorologi skala besar dan regional
• Sebagai input emergency management system dari PLTN dan industri petrokimia
• Prakiraan kabut (fog forecasting)
• Penelitian perambatan gelombang radio dan sinar laser
• Penelitian kimia atmosfer
2.2 Usaha Pengamatan Profil Urban Boundary Layer
Dalam berbagai penelitian telah dilakukan usaha-usaha untuk memperoleh data profil urban boundary layer. Pengamatan yang paling umum dilakukan dengan menggunakan tower. Beberapa pengamatan lain memanfaatkan pesawat dan helikopter observasi serta instrumen air temperature profiler dengan teknologi microwave.
2.2.1 Menara
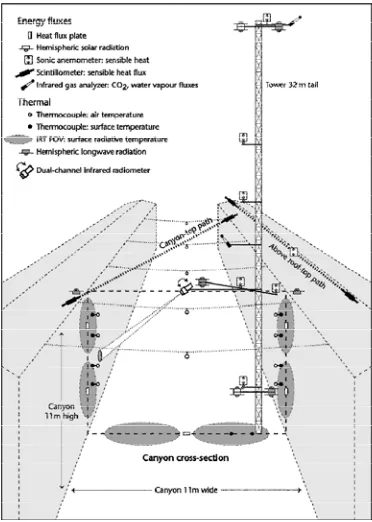
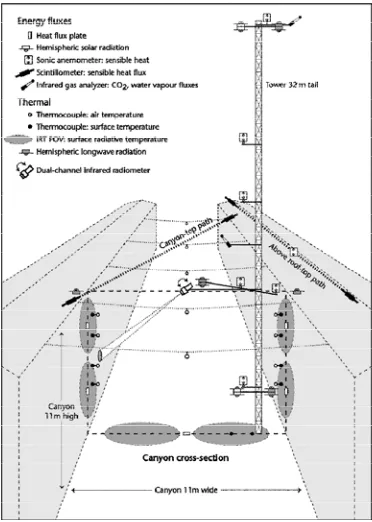
Usaha pengamatan profil Urban boundary layer pada umumnya dilakukan dengan menggunakan media tower. Salah satu contohnya adalah tower BUBBLE (The Basel Urban Boundary Layer Experiment) yang dibangun di kota Basel, swiss. Tower tersebut dibangun dengan ketinggian 32 meter dengan ilustrasi sebagai berikut :
Gambar 2 Tower BUBBLE (Rotach et al 2004)
yang lebih luas diperlukan pembangunan beberapa tower, sedangkan untuk membangun tower sejenis dibutuhkan biaya yang cukup besar.
Gambar 3 Tower urban measurement station (Järvi, 2009)
2.2.2 Pesawat Ultra Light dan Helicopter
Observation Platform (HOP)
Salah satu contoh platform untuk pengamatan profil boundary layer adalah dengan menggunakan pesawat (light plane) yang dilakukan oleh De Franceschi (2003) untuk pengamatan di kota Trento, Italia. Pesawat tersebut dilengkapi sensor pengukuran suhu, tekanan udara dan RH. Pengukuran dengan menggunakan light plane ini dilakukan hingga ketinggian 2500mdpl dalam suatu area, data yang diperoleh dari hasil pengukuran dikombinasikan dengan data spasial GPS dengan metode kriging sehingga menghasilkan output profil vertikal dan spasial boundary layer.
Gambar 4 Ultra light plane platform (Defranceschi, 2003)
Selain penggunaan light plane, Holder (2009) menggunakan alat transportasi udara lainnya untuk pengamatan profil boundary
layer dalam project Helicopter Observation
Platform (HOP) dengan cara memasang alat
pengukuran pada helikopter. Pengukuran menggunakan platform helikopter ini memiliki kelebihan dibanding penggunaan platform pesawat dimana data yang didapat mencakup interval ketinggian pengukuran yang lebih dekat dengan permukaan, sehingga data profil boundary layer menjadi lebih lengkap secara temporal maupun spasial. Namun platform helikopter ini memiliki kelemahan akibat pengaruh baling-baling helikopter data yang didapat menjadi kurang akurat karena data yang diukur oleh alat pengukuran terganggu oleh turbulensi udara di bawah baling-baling.
Gambar 5 Helicopter Observation Platform (Holder, 2009)
2.2.3 Kipp and Zonnen MTP-5 Air Temperature Profiler
Gambar 6 Prinsip pengukuran MTP-5
2.3 Platform panjat
Pengamatan profil urban boundary layer secara vertikal secara efektif dapat dilakukan jika alat pengukuran berada di ketinggian objek yang akan diukur, oleh karena itu diperlukan platform yang mampu mengangkut alat pengukuran dan mampu bergerak secara vertikal. Agar platform dapat bergerak maka motor DC digunakan sebagai penggerak utama, maka diperlukan rangkaian pengontrol yang berfungsi untuk mengontrol gerak motor DC tersebut sehingga mampu bergerak vertikal naik turun. Rangkaian pengontrol yang dipakai adalah rangkaian h-bridge.
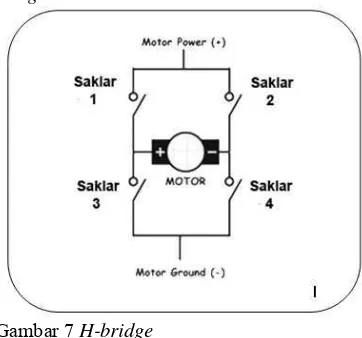
Gambar 7 H-bridge
Nama rangkaian h-bridge berasal dari bentuk skema rangkaian yang berupa 4 saklar yang yang disusun sedemikian rupa sehingga membentuk huruf H. Beragam jenis komponen elektronik dapat difungsikan sebagai saklar pada h-bridge antara lain DPDT switch, relay, transistor, dan power MOSFET. Tetapi yang paling umum digunakan adalah transistor power, keempat saklar tersebut harus diaktifkan secara berpasangan disisi yang berlawanan secara diagonal, yaitu saklar 1 dan saklar 4 agar motor DC berputar searah jarum jam (clockwise), atau saklar 2 dan saklar 3 agar
secara berpasangan di sisi yang sama akan mengakibatkan short circuit pada h-bridge dan mengakibatkan kerusakan pada saklar maupun baterai, fenomena ini disebut shoot
through (McManis 2002). Berikut adalah
contoh tabel 1 yang dapat dibuat dari kombinasi status saklar .
Tabel 1 Kombinasi status saklar h-bridge Saklar
1
Saklar 2
Saklar 3
Saklar Status motor DC
4
On Off Off On
motor DC berputar Clockwise
Off On On Off
motor DC berputar Counter-clockwise
On On Off Off motor DC berhenti Off Off On On motor DC
III. METODOLOGI
3.1 Waktu dan Tempat Penelitian
Penelitian ini dilakukan pada bulan Januari 2010 sampai dengan Januari 2011. Pelaksanaan penelitian dilakukan dengan menggunakan fasilitas Lab Instrumentasi Meteorologi. Dibawah Departemen Meteorologi dan Geofisika, Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Pertanian Bogor.
3.2 Alat dan Bahan
• Komponen pasif elektronik (resistor, kapasitor, PCB dan lain-lain)
• Komponen aktif elektronik (IC, transistor, hall sensor, saklar mekanik) • Motor DC dengan gearbox reduksi • Komponen gerak mekanis (ban karet,
bearing dan lain-lain)
• Sistem pengukuran telemetri (Lab. Instrumentasi Meteorologi IPB)
• Sensor RH dan Sensor suhu (Lab. Instrumentasi Meteorologi IPB)
• Perangkat kerja workshop elektronik dan mekanik
3.3 Tahapan Penelitian
Pada awal penelitian dilakukan pencarian literatur mengenai usaha maupun instrumen pengukuran parameter cuaca secara vertikal, yang kemudian menjadi dasar dari perancangan platform yang akan dibuat sehingga platform yang dihasilkan dari penelitian ini dapat menjadi solusi atas sulitnya pengukuran, maupun tingginya biaya yang dikeluarkan untuk menyelenggarakan pengukuran yang serupa.
3.3.1 Perancangan Platform
Platform dirancang agar mampu mengangkut alat pengukuran yang dilengkapi dengan sistem telemetri dan bergerak vertikal secara kontinu pada lintasan yang dipasang pada balon udara. Sehingga diperlukan suatu mekanisme gerak vertikal yang mampu bergerak pada lintasan yang mampu mengangkat beban berupa alat pengukuran seberat 1kg dan dapat mencapai ketinggian tertentu dan bergerak turun setelah mencapai puncak ketinggian pengukuran. Mekanisme gerak yang dirancang menggunakan motor DC sebagai penggerak platform, sehingga
dibutuhkan suatu rangkaian elektronik sebagai pengontrol gerak motor DC tersebut. Rangkaian elektronik pengontrol motor DC yang dibuat harus mempunyai kontrol gerak yang dapat menunjang kebutuhan gerak vertikal platform, kontrol gerak yang dibutuhkan antara lain :
• Berbalik arah ketika mencapai ujung lintasan
• Berhenti di ketinggian tertentu dan mempunyai jeda waktu sebelum platform bergerak kembali
3.3.3 Perancangan dan Pembuatan Rangkaian Mekanis
Rangkaian mekanik berfungsi untuk menunjang mekanisme gerak vertikal. Pada
platform yang akan dibuat pembuatan
rangkaian ini menggunakan komponen mekanik berupa ban karet dengan menggunakan sistem pulley, guidance lintasan, toggle switch dan motor DC sebagai penggerak.
3.3.2 Perancangan dan Pembuatan Rangkaian Gerak Elektronik
Rangkaian gerak mekanis yang telah dibuat perlu dikontrol sengan sistem kontrol elektronik, untuk itu dilakukan perancangan. dan pembuatan rangkaian elektronik yang akan digunakan sesuai dengan spesifikasi platform yang akan dibuat. Spesifikasi platform yang diutamakan antara lain kemampuan mengangkut beban, perubahan arah gerak, dan jeda gerak di beberapa ketinggian. Kemudian rangkaian yang akan dibuat dibagi menjadi beberapa bagian yaitu :
• H-bridge, dibuat dengan menggunakan
power transistor jenis NPN dan PNP (gambar). Dengan penambahan resistor pada basis transistor sebagai gerbang logic yang diterima dari rangkaian kontrol logic pembalik arah.
• Rangkaian kontrol logic pembalik arah, dibuat dengan menggunakan IC switch 4066, IC counter dan monostable untuk menyuplai logic ke rangkaian h-bridge. • Rangkaian elektronik penjeda waktu,
dibuat menggunakan monostable dengan trigger yang diparalel pada trigger kontrol logic pembalik arah, pembuatan rangkaian elektronik penjeda waktu ini bertujuan untuk menghentikan motor sebelum berbalik arah sehingga kerusakan gearbox akibat perpindahan arah putar motor DC tanpa adanya jeda waktu dapat dihindari.
• Rangkaian elektronik penjeda gerak platform dibuat dengan mengadopsi sistem counter pada anemometer menggunakan magnet, hall sensor, IC counter 4020 dan monostable.
3.3.4 Pemasangan Sistem Telemetri dan Rangkaian Sensor
Sistem telemetri dan rangkaian sensor yang dipasang pada platform adalah sistem logging dan pengukuran data berbasis telemetri yang telah di kembangkan oleh laboratorium instrumentasi meteorologi departemen GFM. Sistem telemetri tersebut mampu mengirimkan satu data setiap menit ke perangkat receiver. Perangkat data logger yang dipakai pada penelitian ini adalah seperangkat komputer notebook yang telah dihubungkan dengan interface receiver dan telah dilengkapi dengan perangkat lunak event logger.
IV. HASIL DAN PEMBAHASAN
4.1 Rangkaian gerak mekanis
Platform membutuhkan suatu sistem gerak mekanis agar dapat bergerak vertikal pada lintasan. Dibutuhkan suatu mekanisme gerak mekanis yang dapat digerakkan oleh motor DC. Perancangan mekanisme tersebut menggunakan sistem pulley yang berupa ban karet yang telah diberi alur dengan guidance sebagai penyelaras lintasan.
4.1.1 Pulley
3.3.3 Perancangan dan Pembuatan Rangkaian Mekanis
Rangkaian mekanik berfungsi untuk menunjang mekanisme gerak vertikal. Pada
platform yang akan dibuat pembuatan
rangkaian ini menggunakan komponen mekanik berupa ban karet dengan menggunakan sistem pulley, guidance lintasan, toggle switch dan motor DC sebagai penggerak.
3.3.2 Perancangan dan Pembuatan Rangkaian Gerak Elektronik
Rangkaian gerak mekanis yang telah dibuat perlu dikontrol sengan sistem kontrol elektronik, untuk itu dilakukan perancangan. dan pembuatan rangkaian elektronik yang akan digunakan sesuai dengan spesifikasi platform yang akan dibuat. Spesifikasi platform yang diutamakan antara lain kemampuan mengangkut beban, perubahan arah gerak, dan jeda gerak di beberapa ketinggian. Kemudian rangkaian yang akan dibuat dibagi menjadi beberapa bagian yaitu :
• H-bridge, dibuat dengan menggunakan
power transistor jenis NPN dan PNP (gambar). Dengan penambahan resistor pada basis transistor sebagai gerbang logic yang diterima dari rangkaian kontrol logic pembalik arah.
• Rangkaian kontrol logic pembalik arah, dibuat dengan menggunakan IC switch 4066, IC counter dan monostable untuk menyuplai logic ke rangkaian h-bridge. • Rangkaian elektronik penjeda waktu,
dibuat menggunakan monostable dengan trigger yang diparalel pada trigger kontrol logic pembalik arah, pembuatan rangkaian elektronik penjeda waktu ini bertujuan untuk menghentikan motor sebelum berbalik arah sehingga kerusakan gearbox akibat perpindahan arah putar motor DC tanpa adanya jeda waktu dapat dihindari.
• Rangkaian elektronik penjeda gerak platform dibuat dengan mengadopsi sistem counter pada anemometer menggunakan magnet, hall sensor, IC counter 4020 dan monostable.
3.3.4 Pemasangan Sistem Telemetri dan Rangkaian Sensor
Sistem telemetri dan rangkaian sensor yang dipasang pada platform adalah sistem logging dan pengukuran data berbasis telemetri yang telah di kembangkan oleh laboratorium instrumentasi meteorologi departemen GFM. Sistem telemetri tersebut mampu mengirimkan satu data setiap menit ke perangkat receiver. Perangkat data logger yang dipakai pada penelitian ini adalah seperangkat komputer notebook yang telah dihubungkan dengan interface receiver dan telah dilengkapi dengan perangkat lunak event logger.
IV. HASIL DAN PEMBAHASAN
4.1 Rangkaian gerak mekanis
Platform membutuhkan suatu sistem gerak mekanis agar dapat bergerak vertikal pada lintasan. Dibutuhkan suatu mekanisme gerak mekanis yang dapat digerakkan oleh motor DC. Perancangan mekanisme tersebut menggunakan sistem pulley yang berupa ban karet yang telah diberi alur dengan guidance sebagai penyelaras lintasan.
4.1.1 Pulley
Selama masa penelitian dalam perancangan platform telah ujicoba berbagai macam pulley sebagai mekanisme gerak vertikal. Mekanisme yang pertama kali dipakai adalah mekanisme pulley A (gambar 9). Mekanisme pulley A dirancang menggunakan dua buah motor DC untuk menggerakkan dua buah roda karet identik, pada mekanisme ini lintasan dipasang di antara roda karet dengan motor DC yang saling bergerak berlawanan agar lintasan dapat bergerak diantara roda karet.
Setelah diujicoba ternyata gerak platform cenderung lambat akibat lintasan terjepit karena posisi roda yang terlalu rapat. Setelah dirancang ulang dengan merenggangkan posisi roda, ternyata lintasan cenderung selip karena permukaan gesek yang berkurang sehingga platform tidak dapat bergerak naik. Kelemahan lainnya dari mekanisme ini adalah konsumsi energi yang boros akibat penggunaan 2 buah motor DC secara simultan. Kemudian dilakukan perancangan ulang dengan menggunakan mekanisme pulley B (gambar 10) sebagai solusi dari kelemahan sistem pulley mekanisme A.
Gambar 10 Mekanisme pulley B
Pada mekanisme pulley B hanya digunakan satu buah motor DC yang menggerakkan roda karet dengan penambahan
guidance untuk menjepit lintasan agar
bergesekan dengan roda karet. Guidance yang dipakai pada mekanisme pulley B dibuat dari bearing kecil yang dipasang di tiga titik disamping roda. Setelah diujicoba ternyata roda karet tidak bergerak dengan baik karena cenderung selip akibat luas permukaan gesek antara roda dan lintasan yang kecil, hal ini diperburuk dengan kejadian lepasnya lintasan dari alur roda karet karena lintasan terlalu bebas bergerak akibat guidance bearing yang terlalu licin sehingga mekanisme panjat menjadi tidak efektif. Dari kedua kegagalan perancangan mekanisme pulley tersebut diketahui kriteria yang tepat dalam perancangan pulley berikutnya, yaitu harus memiliki luas permukaan gesek yang besar dan lintasan tidak boleh terjepit. Dari kriteria tersebut dilakukan perancangan mekanisme pulley yang baru yaitu mekanisme pulley C (gambar 11).
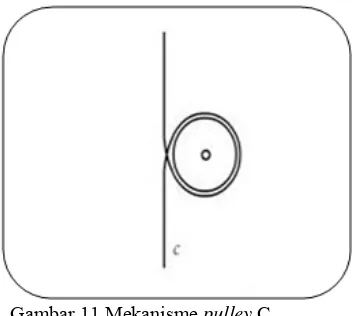
Gambar 11 Mekanisme pulley C
Pada mekanisme C permukaan gesek antara lintasan dan roda karet diperbesar dengan cara melilitkan lintasan pada satu roda karet sehingga luas permukaan gesek menjadi besar dan lintasan tidak terjepit, sehingga diharapkan roda dapat bergerak secara efisien pada lintasan . Dari hasil ujicoba platform dengan mekanisme gerak pulley C dapat bergerak secara efisien pada lintasan tanpa selip serta energi yang dibutuhkan lebih efisien karena hanya menggunakan satu motor DC sebagai penggerak, sehingga mekanisme C adalah mekanisme yang akhirnya digunakan sebagai mekanisme panjat platform.
4.2 Rangkaian gerak elektronik
4.2.1 H-bridge
dan tegangan optimal yang dibutuhkan sesuai spesifikasi h-bridge yang akan dibuat. Sedangkan pemakaian resistor sebesar 4KΩ bertujuan untuk menjenuhkan transistor dengan nilai hfe 60 sehingga kebutuhan arus optimal yang diperlukan motor DC sebesar 200mA pada tegangan 12V dapat dipenuhi. Diketahui dengan rumus
...(1)
...(2)
Keterangan :
Gambar 12 Transistor sebagai saklar
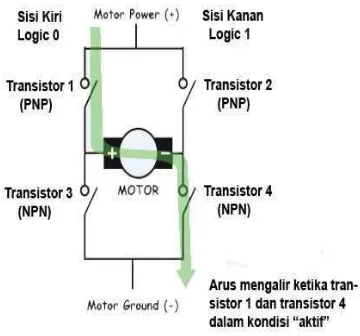
Transistor pada h-bridge dapat terbakar akibat ketidaksesuaian status dimana keempat transistor yang diposisikan sebagai saklar berada dalam status “aktif” (shoot through), sehingga digunakan kombinasi transistor PNP dan NPN dengan tujuan transistor yang berfungsi sebagai saklar aktif secara berpasangan saat mendapat sinyal logic high maupun low agar transistor tidak terbakar karena shoot trough. Mengingat karakteristik transistor PNP yang membutuhkan logic low untuk aktif, sedangkan transistor NPN membutuhkan logic high untuk aktif.
Gambar 13 Aliran arus h-bridge
4.2.2 Kontrol Logic Pembalik Arah
Rangkaian kontrol logic pembalik arah berfungsi untuk membalik sinyal logic yang dialirkan ke basis transistor pada h-bridge sehingga putaran motor DC berbalik arah, mekanisme motor DC berbalik arah ini akan terjadi pada saat platform telah berada diujung lintasan atau dipuncak lintasan sehingga motor DC akan bergerak turun dan akan berbalik arah kembali ketika mencapai awal lintasan atau pangkal lintasan tersebut. Pada awal penelitian rangkaian ini direncanakan menggunakan IC 4069UB hex inverter yang mengubah sinyal low menjadi high maupun sebaliknya. Namun karena IC 4069UB tidak tersedia maka pembuatan kontrol logic pembalik arah disubstitusi dengan menggunakan IC 4066 dengan susunan rangkaian sebagai berikut
Pada rangkaian kontrol logic pembalik arah, sinyal logic akan dirubah oleh rangkaian switch, sehingga output sinyal pada titik A dan titik B akan selalu berlawanan dan motor DC akan berbalik arah ketika mendapat trigger dari monostable. Namun perpindahan arah gerak motor DC terjadi secara langsung tanpa jeda sehingga gigi reduksi pada motor DC rawan mengalami kerusakan, oleh karena itu untuk melindungi motor DC dari kerusakan gigi reduksi akibat perpindahan arah putar secara langsung maka rangkaian kontrol logic pembalik arah diparalel dengan rangkaian monostable pemutus tegangan pada motor DC dengan waktu jeda 2 detik. Sehingga motor DC akan berhenti terlebih dahulu selama 2 detik sebelum akhirnya bergerak kembali.
Gambar 15 Rangkaian monostable pemutus tegangan
4.2.3 Penjeda Gerak Platform
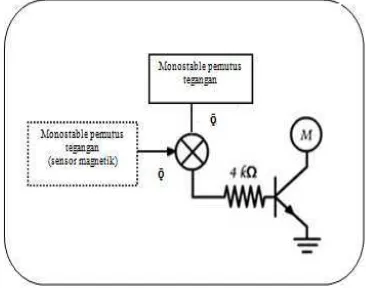
Penjeda gerak platform berfungsi untuk menghentikan gerak platform dibeberapa ketinggian tertentu. Prinsip kerja dari rangkaian ini menggunakan sinyal yang diperoleh dari hall sensor dan IC counter yang mendapat input dari jumlah putaran magnet pada roda. Kemudian IC counter mengirimkan sinyal trigger sehingga IC monostable pemutus tegangan aktif dan platform berhenti. Jarak jeda platform ditentukan oleh nilai bit yang dipakai pada counter, sedangkan lama waktu jeda hingga platform bergerak kembali ditentukan oleh kombinasi nilai resistor dan kapasitor yang digunakan pada monostable pemutus tegangan yang mengontrol switch.
Gambar 16 Rangkaian penjeda gerak
Pada gambar diatas terlihat bahwa monostable pemutus tegangan mengontrol switch yang memberikan logic pada transistor, transistor ini berfungsi memutus tegangan yang diperlukan motor DC sehingga motor DC berhenti. Pada basis transistor tersebut harus diberikan jumlah resistansi yang sama dengan transistor pada h-bridge pengontrol motor DC karena transistor tersebut berhubungan langsung dengan rangkaian
h-bridge sehingga tidak mengganggu jumlah
arus yang disediakan oleh h-bridge untuk motor DC. Kemudian pada platform ini digunakan roda berdiameter 4 cm dan nilai bit 26 pada IC counter serta kombinasi nilai resistor 200MΩ dan kapasitor 1µF, sehingga platform akan berhenti setiap mencapai jarak 8meter selama 8,2 menit ketika jumlah putaran roda mencapai 64 kali. Diketahui dengan rumus :
...(3)
. ...(4)
Ke erangan :t
.
4.3 Sensor Sebagai contoh jika ketinggian teoritis yang
telah ditempuh oleh platform adalah 10meter dengan sudut kemiringan vertikal balon sebesar ° dengan simpangan baku perubahan sudut sebesar ° , , maka ketinggian sebenarnya yang telah ditempuh platform adalah 9,63meter dengan persentase error sebesar 3,7%. Diketahui
enga
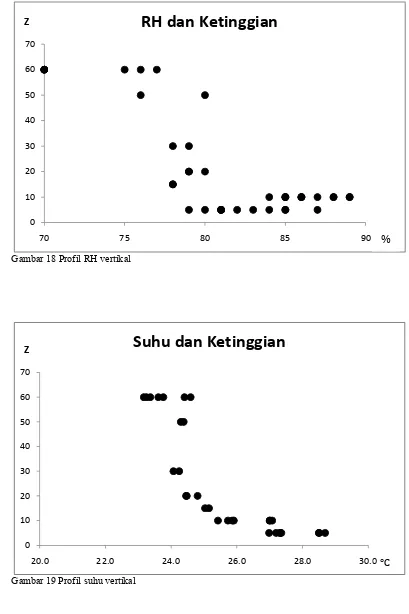
Sebelum proses pembuatan platform selesai, dilakukan pengujian sensor yang dipakai sebagai alat pengukuran yaitu sensor RH dan sensor suhu. Ujicoba sensor ini dilakukan untuk mempersiapkan sensor yang nantinya akan dipasang pada platform. Sensor tersebut telah dirangkai sedemikian rupa pada rangkaian transmitter telemetri oleh laboratorium Instrumentasi Meteorologi Departemen Geofisika dan Meteorologi. Dengan kemampuan pengiriman sebanyak satu data per menit. Pengiriman data oleh telemetri yang dirangkai dengan sensor tersebut telah diujicoba baik secara horizontal maupun vertikal. Secara horizontal pengiriman data diujicoba dengan cara menempatkan sensor dan transmitter secara berjauhan dengan receiver, dari hasil ujicoba diketahui bahwa data dapat diterima oleh receiver tanpa gangguan hingga jarak maksimal 100meter. Kemudian ujicoba secara vertikal dilakukan dengan memasang sensor dan transmitter pada rangkaian balon gas berukuran sedang sebanyak 200 buah yang dibungkus dengan trashbag, pembungkusan dengan trashbag bertujuan untuk menahan gas jika terjadi kebocoran gas pada balon atau jika balon tersebut pecah. Ujicoba vertikal dilakukan di atas gedung OFAC B11. Sensor yang telah dirangkai dengan transmitter diterbangkan dengan balon ukuran sedang sebanyak 200 buah pada ketinggian maksimal-60meter, ketinggian pengukuran maksimal 60meter ini disebabkan keterbatasan daya angkat balon yang hanya mencapai 60meter. Namun dengan hasil ujicoba secara horizontal dapat diasumsikan bahwa data hasil pengukuran akan dapat diterima oleh receiver secara vertikal pada ketinggian 100meter mengingat kondisi pengukuran menggunakan balon secara vertikal yang bebas penghalang. Ujicoba vertikal menggunakan balon di beberapa ketinggian tersebut menghasilkan profil RH dan profil suhu sebagai berikut :
d n rumus :
sin ...(5)
%... ...(6)
eterang K an :
%
Gambar 18 Profil RH vertikal 0
10 20 30 40 50 60 70
70 75 80 85 90
RH
dan
Ketinggian
Z%
Gambar 19 Profil suhu vertikal 0
10 20 30 40 50 60 70
20.0 22.0 24.0 26.0 28.0 30.0
Suhu
dan
Ketinggian
4.3 Platform
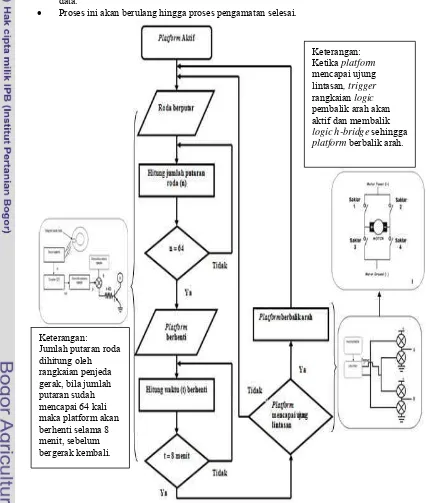
Secara keseluruhan platform mempunyai prinsip kerja sebagai berikut : • Bergerak vertikal pada lintasan.
• Ketika jumlah putaran roda telah mencapai 64 kali maka platform akan berhenti.
• Saat berhenti pada ketinggian tertentu platform akan memberi waktu kepada sensor untuk mengukur data dan mengirimkan data ke-receiver melalui transmitter telemetri.
• Saat mencapai puncak lintasan, rangkaian kontrol logic pembalik arah dan monostable pemutus tegangan akan aktif sehingga platform akan berhenti selama 2 detik sebelum bergerak turun.
• Saat bergerak turun, platform akan kembali berhenti di ketinggian tertentu untuk memperoleh data.
• Proses ini akan berulang hingga proses pengamatan selesai.
Gambar 20 Diagram alir prinsip kerja platform
Keterangan: Ketika platform mencapai ujung lintasan, trigger rangkaian logic pembalik arah akan aktif dan membalik logic h-bridge sehingga platform berbalik arah.
V. PENUTUP
5. Kesimpulan
latform panjat yang dirancang pada penelit
k pada pulley harus
tan beban berupa alat
n platform yang telah dibuat
an dengan
entu dan
ketika mencapai puncak
t ini dapat menjadi solusi yang
Perancangan platform ini akan menjadi lebih
dengan
ang lebih ringan dan
khusus untuk
DAFTAR PUSTAKA
Batchvarov in urban
dispersion an air quality studies.
De fran
rso D and Zatelli P. 2003.
Gryning
an dispersion modelling.
Holder
ric boundary
Gummel
model of bipolar
Järvi, L.
en
Järvi, L
P., Keronen P.,
Lenz J
tions.
McMani 1
P
ian ini digunakan untuk mengangkut alat pengukuran ke beberapa ketinggian dengan bergerak pada lintasan vertikal sehingga pengamatan profil urban boundary layer dapat dilakukan. Dalam proses perancangan digunakan mekanisme pulley sebagai mekanisme gerak vertikal serta motor DC sebagai penggerak utama yang dikontrol oleh rangkaian elektronik. Dari hasil penelitian diketahui:
• Permukaan gese
besar sehingga gerakan pulley yang selip akibat permukaan gesek antara pulley dan lintasan yang terlalu kecil dapat dihindari.
• Pengangku
pengukuran seberat 1kg pada platform membutuhkan arus minimal sebesar 200mA.
Secara keseluruha
dalam penelitian ini telah mampu : • Bergerak vertikal pada lintas
mengangkut alat pengukuran. • Berhenti pada ketinggian tert
memberikan waktu kepada alat pengukuran untuk melakukan pengukuran.
• Berbalik arah lintasan. Platform panja
ekonomis dan praktis untuk melakukan pengamatan urban boundary layer.
5.2 Saran
baik jika dikembangkan lagi dengan : • Pembuatan rumah Platform
bentuk yang lebih ringkas dan bobot yang lebih ringan.
• Pemakaian baterai y
kapasitas lebih besar sehingga platform dapat aktif lebih lama
• Pembuatan connector
memasang alat pengukuran yang akan diangkut.
a E. 2003. Progress d
Preprints 5th Int Conf Urban Climate, 1–5 September 2003, Lodz, PL.
ceschi M., Rampanelli G, Zardi D, Sgue
Development of a measurement platform on a light airplane and analysis of airborne measurements in the atmospheric boundary layer, in annals of geophysics, vol. 46, n. 2, April 2003, Trento, Università di Trento.
SE, Batchvarova E. 2004. Advances in urb
NATO advanced research workshop: Advances in air pollution modelling for environmental security, Borovetz (BG), 8–12 May 2004.
HE. 2009. A helicopter observation platform for atmosphe
layer studies. Duke university. 132 pages; 3352219
HK., Poon RC. 1970. "An integral charge control
transistors," Bell Syst. Tech. J., vol. 49, pp. 827–852, May–June 1970 , Hannuniemi H., Hussein T., Aalto
P., Hillamo R., Mäkelä T., Keron P., Siivola E., Vesala T., and Kulmala M. 2009. The urban measurement station SMEAR III : Continuous monitoring of air pollution and surface-atmosphere interactions in Helsinki, Finland. Boreal Environment Research 14 (Suppl. A),86-109.
., Rannik U., Mammarella I., Sogachev A., Aalto
Siivola E., Kulmala M., and Vesala T. 2009. Annual particle flux observations over a heterogeneous urban area. Atmospheric Chemistry and Physics 9(3): 13407-13437 ., Edelstein AS. 2006. Magnetic
Sensors and Their Applica IEEE Sensors Journal,Vol. 6, No. 3, June 2006.
s, C., 2002. Chuck's Robotics Notebook.
PERANCANGAN
PLATFORM
PANJAT UNTUK PENGAMATAN
PROFIL
URBAN BOUNDARY LAYER
ZAHEDI
DEPARTEMEN GEOFISIKA DAN METEOROLOGI
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
V. PENUTUP
5. Kesimpulan
latform panjat yang dirancang pada penelit
k pada pulley harus
tan beban berupa alat
n platform yang telah dibuat
an dengan
entu dan
ketika mencapai puncak
t ini dapat menjadi solusi yang
Perancangan platform ini akan menjadi lebih
dengan
ang lebih ringan dan
khusus untuk
DAFTAR PUSTAKA
Batchvarov in urban
dispersion an air quality studies.
De fran
rso D and Zatelli P. 2003.
Gryning
an dispersion modelling.
Holder
ric boundary
Gummel
model of bipolar
Järvi, L.
en
Järvi, L
P., Keronen P.,
Lenz J
tions.
McMani 1
P
ian ini digunakan untuk mengangkut alat pengukuran ke beberapa ketinggian dengan bergerak pada lintasan vertikal sehingga pengamatan profil urban boundary layer dapat dilakukan. Dalam proses perancangan digunakan mekanisme pulley sebagai mekanisme gerak vertikal serta motor DC sebagai penggerak utama yang dikontrol oleh rangkaian elektronik. Dari hasil penelitian diketahui:
• Permukaan gese
besar sehingga gerakan pulley yang selip akibat permukaan gesek antara pulley dan lintasan yang terlalu kecil dapat dihindari.
• Pengangku
pengukuran seberat 1kg pada platform membutuhkan arus minimal sebesar 200mA.
Secara keseluruha
dalam penelitian ini telah mampu : • Bergerak vertikal pada lintas
mengangkut alat pengukuran. • Berhenti pada ketinggian tert
memberikan waktu kepada alat pengukuran untuk melakukan pengukuran.
• Berbalik arah lintasan. Platform panja
ekonomis dan praktis untuk melakukan pengamatan urban boundary layer.
5.2 Saran
baik jika dikembangkan lagi dengan : • Pembuatan rumah Platform
bentuk yang lebih ringkas dan bobot yang lebih ringan.
• Pemakaian baterai y
kapasitas lebih besar sehingga platform dapat aktif lebih lama
• Pembuatan connector
memasang alat pengukuran yang akan diangkut.
a E. 2003. Progress d
Preprints 5th Int Conf Urban Climate, 1–5 September 2003, Lodz, PL.
ceschi M., Rampanelli G, Zardi D, Sgue
Development of a measurement platform on a light airplane and analysis of airborne measurements in the atmospheric boundary layer, in annals of geophysics, vol. 46, n. 2, April 2003, Trento, Università di Trento.
SE, Batchvarova E. 2004. Advances in urb
NATO advanced research workshop: Advances in air pollution modelling for environmental security, Borovetz (BG), 8–12 May 2004.
HE. 2009. A helicopter observation platform for atmosphe
layer studies. Duke university. 132 pages; 3352219
HK., Poon RC. 1970. "An integral charge control
transistors," Bell Syst. Tech. J., vol. 49, pp. 827–852, May–June 1970 , Hannuniemi H., Hussein T., Aalto
P., Hillamo R., Mäkelä T., Keron P., Siivola E., Vesala T., and Kulmala M. 2009. The urban measurement station SMEAR III : Continuous monitoring of air pollution and surface-atmosphere interactions in Helsinki, Finland. Boreal Environment Research 14 (Suppl. A),86-109.
., Rannik U., Mammarella I., Sogachev A., Aalto
Siivola E., Kulmala M., and Vesala T. 2009. Annual particle flux observations over a heterogeneous urban area. Atmospheric Chemistry and Physics 9(3): 13407-13437 ., Edelstein AS. 2006. Magnetic
Sensors and Their Applica IEEE Sensors Journal,Vol. 6, No. 3, June 2006.
s, C., 2002. Chuck's Robotics Notebook.
ohan N, Undeland TM, Robbins WP. 1995.
Oke TR er climates, 2nd
Horowit of
Piringer ds). 2002. Mixing
Rotach ale
Rotach . 2002.
Rotach Gryning SE, Batchvarova E,
Temiz I M. 2007 . The Speed
Tenneke 972. A first course
M
Power Electronics: Converters, Applications, and Design, 2nd Ed. John Wiley & Sons.
. 1987. Boundary lay
edn. London: Routledge, 435 pp. z P, Hill W. 1989. The Art
Electronics (2nd ed.). Cambridge University Press.
M, Kukkonen J (e
height and inversions in urban areas. Proceedings of the workshop 3and 4 October 2001, Toulouse, France, (ISBN: 92-984-4214-X), 113 pp MW. 2001. Simulation of urban-sc
dispersion using a Lagrangian stochastic dispersion model. Bound-Layer Meteor 99: 379–410
MW, Fisher B, Piringer M
COST 715 Workshop on urban boundary layer parameterizations. Bull Amer Meteor Soc 83(10): 1501– 1504
MW,
Christen A, Vogt R. 2004. BUBBLE – an Urban boundary layer Meteorology Project.Theorethical and applied climatology, Springer-Verlag, 233
. and Akar
Control of DC Servo Motor with Proportional Integral, Fuzzy Logic and Adaptive Neuro-Fuzzy Inference Systems , World Scientific and Engineering Academy and Society,İstanbul.
s H, Lumley JJ. 1
PERANCANGAN
PLATFORM
PANJAT UNTUK PENGAMATAN
PROFIL
URBAN BOUNDARY LAYER
ZAHEDI
DEPARTEMEN GEOFISIKA DAN METEOROLOGI
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
ABSTRACT
ZAHEDI. The Design of Climbing Platform to Monitors Urban Boundary Layer Profile. Supervised by BREGAS BUDIANTO.
The needs of urban boundary layer data availability has become an increasing issue this recent years. By monitoring the real-time urban boundary layer profile, proper strategies to minimise risk of economic loss, environmental and health impacts due to air pollutant dipersion and other weather characteristics can be predicted.In recent cases, many studies of urban boundary layer experienced difficulties to acquire the vertical profile datas because of the intruments insufficientcy to measure such data. This study leads to the development of an instrument carrier platform to measure vertical urban boundary layer profiles (0-100m). Development of this platform uses simple robotics mechanism such h-bridge, debouncer circuit, magnetic sensor circuit, and timer circuit.This platform is able to carry the instrument to certain heights and conduct measurement process to obtain vertical profiles of urban boundary layer.Therefore this platform expected to be a practical and economic solution to obtain urban boundary layer data.
ABSTRAK
ZAHEDI. Perancangan Platform Panjat untuk Pengamatan Profil Urban Boundary Layer. Dibawah bimbingan BREGAS BUDIANTO.
Ketersediaan data profil vertikal urban boundary layer dewasa ini sangat dibutuhkan. Data profil tersebut umumnya digunakan sebagai input model polutan dan model cuaca lainnya untuk mengurangi dan mencegah kerugian pada sektor ekonomi, lingkungan maupun kesehatan. Kendala utama dalam memperoleh data tersebut terletak pada kemampuan instrumen yang telah ada untuk memperoleh data vertikal di beberapa ketinggian. Penelitian ini bertujuan untuk merancang platform yang mampu memfasilitasi pengukuran vertikal pada ketinggian urban boundary layer (0-100m). Pengembangan platform ini menggunakan mekanisme robotik sederhana seperti h-bridge, rangkaian kontrol logic pembalik arah, sensor magnetik dan rangkaian jeda waktu.Platform ini telah mampu mengangkut alat pengukuran pada beberapa ketinggian untuk melakukan pengukuran. Sehingga diharapkan platform panjat ini dapat menjadi solusi yang ekonomis dan praktis untuk melakukan pengamatan urban boundary layer.
PERANCANGAN
PLATFORM
PANJAT UNTUK PENGAMATAN
PROFIL
URBAN BOUNDARY LAYER
ZAHEDI
Skripsi
Sebagai salah satu syarat untuk memperoleh gelar
Sarjana Sains pada
Departemen Geofisika dan Meteorologi
DEPARTEMEN GEOFISIKA DAN METEOROLOGI
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
Judul skripsi : Pengembangan
Platform
Panjat untuk Pengamatan Profil
Urban
Boundary Layer
Nama
: Zahedi
NIM
:
G24060009
Menyetujui
Pembimbing I
(Ir. Bregas Budianto, Ass Dpl)
NIP. 19640308 199403 1 002
Mengetahui:
Ketua Departemen
KATA PENGANTAR
Puji dan syukur penulis ucapkan kepada Allah swt atas segala berkat dan karunia-Nya sehingga tugas akhir ini dapat diselesaikan dengan baik. Tugas akhir ini berjudul Perancangan Platform Panjat untuk Pengamatan Profil Urban Boundary Layer. Penelitian dilaksanakan pada bulan Januari 2010 hingga Januari 2011.
Penulis mengucapkan terima kasih Ir. Bregas Budianto, Ass Dpl selaku pembimbing yang telah memberikan masukan dan pengarahan kepada penulis sehingga tugas akhir ini dapat selesai dengan baik. Tugas akhir ini dapat terlaksana atas dukungan dan bantuan dari berbagai pihak. Oleh karena itu, penulis juga mengucapkan terima kasih yang sebesar-besarnya kepada :
1. Ayah dan Mama serta Kak Ida, Kak Rina, Afif sebagai sumber inspirasi maupun dukungan baik secara moril maupun materiil sehingga tugas akhir ini dapat diselesaikan.
2. Staf workshop Instrumentasi Meteorologi, yaitu Kak Oki, Kak Wir, Kak Shandy, Kak Yudi, Kak Fadhil, Kak Yasmin, Kak Franz, Kak Indra, Bang Apit. Terimakasih untuk setahun yang luar biasa dengan persahabatan ,waktu dan kesabaran yang diberikan dalam membantu penulis memahami sistem kerja elektronik maupun dalam menyelesaikan tugas akhir.
3. Rizky Rambey, Bayu Tarigan, Saputri Sapta, Anggi Laura, Ariani Ichtisinii, Anggi Lubis, Alfan Harahap, Onye, Wima, Vendry yang menemani, membantu dan memberikan semangat kepada penulis dalam mengerjakan tugas akhir ini.
4. Teman-teman GFM 43 : Abie, Ariyani, Chris, Debo, Desi, Dipa, Dian, Diana, Diki, Egie, Enno, Fajar, Gema, Hilda, Lastri, Legran, Maya, Ray, Rendy, Rizki, Robby, Sandro, Sarah, Uji dan Yuli yang telah banyak membantu dan berbagi keceriaan selama penulis menempuh pendidikan di departemen GFM.
5. Segenap civitas GFM : Pak Pono, Bu Inda, Mas Azis, Pak Jun, Mbak Wanti, Mbak Icha, Pak Badrudin, Pak Kaerun, Pak Udin, dan para dosen serta staf pengajar untuk bimbingan dan bantuannya selama ini.
6. Teman-teman, Abang-abang, Kakak-kakak, adik-adik Ikatan Mahasiswa Muslim Asal Medan. Dan kepada semua pihak lainnya yang telah banyak membantu penulis dalam menyelesaikan tugas akhir ini, namun tidak dapat disebutkan satu persatu. Tanpa mereka, semuanya ini tidak akan berarti apa-apa. Penulis juga menyadari bahwa penelitian ini masih jauh dari sempurna, namun semoga dapat bermanfaat bagi pihak-pihak yang membutuhkan.
Bogor, Februari 2011
RIWAYAT HIDUP
Penulis dilahirkan di Lhokseumawe pada tanggal 22 juli 1988 sebagai anak ketiga dari pasangan H.Zakaria Usman dan Hj.Arian Abd.Manaf. Tahun 2000 penulis menyelesaikan pendidikan dasar di SD Negeri 1 Lhokseumawe dan melanjutkan pendidikan menengah pertama di MTs Al-azhar Medan dan tahun 2003 melanjutkan pendidikan menengah atas di SMU Negeri 2 Medan. Penulis diterima di IPB pada tahun 2006 melalui Seleksi Penerimaan Mahasiswa Baru. Setahun kemudian penulis diterima pada program studi mayor Meteorologi Terapan, Departemen Geofisika dan Meteorologi, Fakultas Matematika dan Ilmu Pengetahuan Alam.
DAFTAR ISI
Halaman
DAFTAR TABEL ... ix
DAFTAR GAMBAR ... x
DAFTAR LAMPIRAN ... xi
I. PENDAHULUAN ... 1 1.1 Latar Belakang ... 1 1.2 Tujuan ... 1
II. TINJAUAN PUSTAKA ... 1 2.1 Fungsi Pengukuran Profil urban boundary layer ... 1 2.2 Usaha Pengamatan Profil urban boundary layer ... 2
2.2.1 Menara BUBBLE ... 2 2.2.2 Kipp and zonnen MTP-5 Air Temperature Profiler ... 3 2.3 Platform panjat ... 4 III. METODOLOGI ... 5 3.1 Waktu dan Tempat Penelitian ... 5 3.2 Alat dan Bahan ... 5 3.3 Tahapan penelitian ... 5 3.3.1 Perancangan Platform ... 5
3.3.2 Perancangan dan Pembuatan Rangkaian Mekanis ... 6 3.3.3Perancangan dan Pembuatan Rangkaian Gerak Elektronik ... 6
3.3.4 Pemasangan Sistem Telemetri dan Rangkaian Sensor ... 6
IV. HASIL DAN PEMBAHASAN ... 5 4.1 Rangkaian gerak mekanis ... 5 4.1.1 Pulley ... 6 4.2 Rangkaian gerak elektronik ... 7 4.2.1 H-bridge ... 7 4.2.2 Kontrol Logic Pembalik Arah ... 8 4.2.3 Penjeda Gerak Platform ... 9 4.3 Sensor ... 10 4.4.Platform ... 12 V. PENUTUP ... 13
5.1 Kesimpulan ... 13 5.2 Saran ... 13 DAFTAR PUSTAKA ... 13
DAFTAR TABEL
Halaman
1 Kombinasi status saklar h-bridge ... 4
DAFTAR GAMBAR
Halaman
DAFTAR LAMPIRAN
Halaman
1 Perhitungan kebutuhan arus transistor ... 15 2 Perhitungan jeda gerak platform ... 16 3 Perhitungan fungsi sudut ... 17 4 Foto rangkaian h-bridge ... 18 5 Foto rangkaian gerak ... 18 6 Foto platform panjat ... 19 7 Foto interface dan receiver telemetri ... 19
I. PENDAHULUAN
1.1 Latar Belakang
Sangat sedikit penilitian mengenai profil dari urban boundary layer yang telah dilakukan disebabkan keterbatasan sumber informasi mengenai karakteristik parameter cuaca pada lapisan permukaan (Rotach et al. 2004). Salah satu diantaranya adalah informasi yang meliputi suhu dan kelembaban. Namun demikian, seringkali ditemukan kesulitan dalam memperoleh profil suhu dan kelembaban secara vertikal pada beberapa ketinggian tertentu. Kendala utama terletak pada kemampuan instrumen dalam melakukan pengukuran secara vertikal akibat keadaan geografis dan jarak yang seringkali dapat menghambat dalam memperoleh informasi tersebut, sehingga dibutuhkan biaya yang relatif mahal untuk menunjang kemampuan alat tersebut seperti membangun sebuah menara pengamat khusus. Oleh karena itu, sangat diperlukan suatu instrumen dengan sistem yang dapat mengukur parameter cuaca di berbagai ketinggian, keadaan geografis dan letak tempuhnya. Dengan demikian, dikembangkan suatu platform pengukur parameter cuaca pada urban boundary layer yang mampu menunjang pengukuran di berbagai ketinggian secara kontinu dengan mengadopsi teknologi robotik sederhana dan sistem telemetri, di mana sistem ini mempunyai kemampuan untuk mengukur parameter cuaca secara vertikal dan melakukan pengukuran dari tempat yang berjauhan. Sehingga dengan platform dan sistem ini diharapkan dapat memberi solusi untuk mendapatkan informasi parameter cuaca tersebut.
1.2 Tujuan
Penelitian ini bertujuan untuk merancang platform yang dapat bergerak vertikal dan mampu mengangkut alat pengukuran untuk mengukur profil urban boundary layer dengan kemampuan telemetri.
II. TINJAUAN PUSTAKA
2.1 Fungsi Pengamatan Profil Urban Boundary Layer
[image:31.595.325.513.259.522.2]Urban boundary layer telah menjadi suatu studi yang sangat menarik perhatian dewasa ini. lebih dari itu urban boundary layer mempunyai karakteristik struktur tiga dimensi yang rumit sehingga sangat sulit untuk ditelaah secara komprehensif (Rotach et al., 2002). Oke (1987) telah membagi Urban boundary layer kedalam beberapa sublayer secara vertikal yaitu :
Gambar 1 Urban boundary layer (Oke 1987)
¾ Urban Canopy Layer (UCL) berkisar
dari ketinggian permukaan tanah hingga ketinggian rata-rata gedung dan pepohonan.
¾ Inertial sublayer (IS) berada diatas
ketinggian ideal dari gedung dan pepohonan lingkungan perkotaan (Tennekes and Lumely, 1972).
¾ Outer Urban boundary layer
(OUBL)
Merupakan lapisan terluar dari Urban boundary layer.
ketiga sublayer tersebut . Pada kondisi adiabatik, gas-gas polutan,aerosol dan partikulat cenderung naik ke atmosfer dan terdispersi. Namun pada kasus inversi suhu, lapisan udara hangat dapat menahan polutan pada lapisan permukaan. Hal ini menyebabkan terjadinya kualitas udara buruk yang dapat berlangsung hingga beberapa jam sampai lapisan inversi terurai. Sehingga diperlukan model pencemaran udara untuk memperhitungkan resiko dan dispersi pencemaran polutan tersebut. Data profil temperatur sangat dibutuhkan sebagai input primer untuk membuat model plume and dispersion dimana pembentukan dan penguraian lapisan inversi pada area tertentu dapat diprediksi dengan pengawasan profil temperatur atmosfer secara real-time, sehingga dampak buruk pada lingkungan dan kesehatan dapat diantisipasi. akan tetapi kebanyakan model pencemaran yang telah dikembangkan hanya mencakup lingkungan non-perkotaan dan tidak menyertakan dispersi polutan pada lapisan Urban Boundary Layer (Rotach, 2001). Beberapa kegunaan data profil Urban boundary layer antara lain :
• Investigasi efek urban heat island • Pengawasan kestabilan atmosfer bandar
udara
• Prakiraan meteorologi skala besar dan regional
• Sebagai input emergency management system dari PLTN dan industri petrokimia
• Prakiraan kabut (fog forecasting)
• Penelitian perambatan gelombang radio dan sinar laser
• Penelitian kimia atmosfer
2.2 Usaha Pengamatan Profil Urban Boundary Layer
Dalam berbagai penelitian telah dilakukan usaha-usaha untuk memperoleh data profil urban boundary layer. Pengamatan yang paling umum dilakukan dengan menggunakan tower. Beberapa pengamatan lain memanfaatkan pesawat dan helikopter observasi serta instrumen air temperature profiler dengan teknologi microwave.
2.2.1 Menara
Usaha pengamatan profil Urban boundary layer pada umumnya dilakukan dengan menggunakan media tower. Salah satu contohnya adalah tower BUBBLE (The Basel Urban Boundary Layer Experiment) yang dibangun di kota Basel, swiss. Tower tersebut dibangun dengan ketinggian 32 meter dengan ilustrasi sebagai berikut :
Gambar 2 Tower BUBBLE (Rotach et al 2004)
[image:32.595.324.510.210.471.2]yang lebih luas diperlukan pembangunan beberapa tower, sedangkan untuk membangun tower sejenis dibutuhkan biaya yang cukup besar.
Gambar 3 Tower urban measurement station (Järvi, 2009)
2.2.2 Pesawat Ultra Light dan Helicopter
Observation Platform (HOP)
Salah satu contoh platform untuk pengamatan profil boundary layer adalah dengan menggunakan pesawat (light plane) yang dilakukan oleh De Franceschi (2003) untuk pengamatan di kota Trento, Italia. Pesawat tersebut dilengkapi sensor pengukuran suhu, tekanan udara dan RH. Pengukuran dengan menggunakan light plane ini dilakukan hingga ketinggian 2500mdpl dalam suatu area, data yang diperoleh dari hasil pengukuran dikombinasikan dengan data spasial GPS dengan metode kriging sehingga menghasilkan output profil vertikal dan spasial boundary layer.
Gambar 4 Ultra light plane platform (Defranceschi, 2003)
Selain penggunaan light plane, Holder (2009) menggunakan alat transportasi udara
Platform (HOP) dengan cara memasang alat
[image:33.595.115.302.133.286.2]pengukuran pada helikopter. Pengukuran menggunakan platform helikopter ini memiliki kelebihan dibanding penggunaan platform pesawat dimana data yang didapat mencakup interval ketinggian pengukuran yang lebih dekat dengan permukaan, sehingga data profil boundary layer menjadi lebih lengkap secara temporal maupun spasial. Namun platform helikopter ini memiliki kelemahan akibat pengaruh baling-baling helikopter data yang didapat menjadi kurang akurat karena data yang diukur oleh alat pengukuran terganggu oleh turbulensi udara di bawah baling-baling.
Gambar 5 Helicopter Observation Platform (Holder, 2009)
2.2.3 Kipp and Zonnen MTP-5 Air Temperature Profiler
[image:33.595.324.507.269.438.2] [image:33.595.113.304.524.691.2]Gambar 6 Prinsip pengukuran MTP-5
2.3 Platform panjat
Pengamatan profil urban boundary layer secara vertikal secara efektif dapat dilakukan jika alat pengukuran berada di ketinggian objek yang akan diukur, oleh karena itu diperlukan platform yang mampu mengangkut alat pengukuran dan mampu bergerak secara vertikal. Agar platform dapat bergerak maka motor DC digunakan sebagai penggerak utama, maka diperlukan rangkaian pengontrol yang berfungsi untuk mengontrol gerak motor DC tersebut sehingga mampu bergerak vertikal naik turun. Rangkaian pengontrol yang dipakai adalah rangkaian h-bridge.
Gambar 7 H-bridge
Nama rangkaian h-bridge berasal dari bentuk skema rangkaian yang berupa 4 saklar yang yang disusun sedemikian rupa sehingga membentuk huruf H. Beragam jenis komponen elektronik dapat difungsikan sebagai saklar pada h-bridge antara lain DPDT switch, relay, transistor, dan power MOSFET. Tetapi yang paling umum digunakan adalah transistor power, keempat saklar tersebut harus diaktifkan secara berpasangan disisi yang berlawanan secara diagonal, yaitu saklar 1 dan saklar 4 agar motor DC berputar searah jarum jam (clockwise), atau saklar 2 dan saklar 3 agar motor DC berputar berlawanan arah jarum jam (counter-clockwise). Jika saklar aktif
secara berpasangan di sisi yang sama akan mengakibatkan short circuit pada h-bridge dan mengakibatkan kerusakan pada saklar maupun baterai, fenomena ini disebut shoot
through (McManis 2002). Berikut adalah
[image:34.595.323.511.202.360.2]contoh tabel 1 yang dapat dibuat dari kombinasi status saklar .
Tabel 1 Kombinasi status saklar h-bridge Saklar
1
Saklar 2
Saklar 3
Saklar Status motor DC
4
On Off Off On
motor DC berputar Clockwise
Off On On Off
motor DC berputar Counter-clockwise
On On Off Off motor DC berhenti Off Off On On motor DC
[image:34.595.116.297.386.555.2]III. METODOLOGI
3.1 Waktu dan Tempat Penelitian
Penelitian ini dilakukan pada bulan Januari 2010 sampai dengan Januari 2011. Pelaksanaan penelitian dilakukan dengan menggunakan fasilitas Lab Instrumentasi Meteorologi. Dibawah Departemen Meteorologi dan Geofisika, Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Pertanian Bogor.
3.2 Alat dan Bahan
• Komponen pasif elektronik (resistor, kapasitor, PCB dan lain-lain)
• Komponen aktif elektronik (IC, transistor, hall sensor, saklar mekanik) • Motor DC dengan gearbox reduksi • Komponen gerak mekanis (ban karet,
bearing dan lain-lain)
• Sistem pengukuran telemetri (Lab. Instrumentasi Meteorologi IPB)
• Sensor RH dan Sensor suhu (Lab. Instrumentasi Meteorologi IPB)
• Perangkat kerja workshop elektronik dan mekanik
3.3 Tahapan Penelitian
Pada awal penelitian dilakukan pencarian literatur mengenai usaha maupun instrumen pengukuran parameter cuaca secara vertikal, yang kemudian menjadi dasar dari perancangan platform yang akan dibuat sehingga platform yang dihasilkan dari penelitian ini dapat menjadi solusi atas sulitnya pengukuran, maupun tingginya biaya yang dikeluarkan untuk menyelenggarakan pengukuran yang serupa.
3.3.1 Perancangan Platform
Platform dirancang agar mampu mengangkut alat pengukuran yang dilengkapi dengan sistem telemetri dan bergerak vertikal secara kontinu pada lintasan yang dipasang pada balon udara. Sehingga diperlukan suatu mekanisme gerak vertikal yang mampu bergerak pada lintasan yang mampu mengangkat beban berupa alat pengukuran seberat 1kg dan dapat mencapai ketinggian tertentu dan bergerak turun setelah mencapai puncak ketinggian pengukuran. Mekanisme gerak yang dirancang menggunakan motor
dibutuhkan suatu rangkaian elektronik sebagai pengontrol gerak motor DC tersebut. Rangkaian elektronik pengontrol motor DC yang dibuat harus mempunyai kontrol gerak yang dapat menunjang kebutuhan gerak vertikal platform, kontrol gerak yang dibutuhkan antara lain :
• Berbalik arah ketika mencapai ujung lintasan
[image:35.595.326.518.159.712.2]• Berhenti di ketinggian tertentu dan mempunyai jeda waktu sebelum platform bergerak kembali
3.3.3 Perancangan dan Pembuatan Rangkaian Mekanis
Rangkaian mekanik berfungsi untuk menunjang mekanisme gerak vertikal. Pada
platform yang akan dibuat pembuatan
rangkaian ini menggunakan komponen mekanik berupa ban karet dengan menggunakan sistem pulley, guidance lintasan, toggle switch dan motor DC sebagai penggerak.
3.3.2 Perancangan dan Pembuatan Rangkaian Gerak Elektronik
Rangkaian gerak mekanis yang telah dibuat perlu dikontrol sengan sistem kontrol elektronik, untuk itu dilakukan perancangan. dan pembuatan rangkaian elektronik yang akan digunakan sesuai dengan spesifikasi platform yang akan dibuat. Spesifikasi platform yang diutamakan antara lain kemampuan mengangkut beban, perubahan arah gerak, dan jeda gerak di beberapa ketinggian. Kemudian rangkaian yang akan dibuat dibagi menjadi beberapa bagian yaitu :
• H-bridge, dibuat dengan menggunakan
power transistor jenis NPN dan PNP (gambar). Dengan penambahan resistor pada basis transistor sebagai gerbang logic yang diterima dari rangkaian kontrol logic pembalik arah.
• Rangkaian kontrol logic pembalik arah, dibuat dengan menggunakan IC switch 4066, IC counter dan monostable untuk menyuplai logic ke rangkaian h-bridge. • Rangkaian elektronik penjeda waktu,
dibuat menggunakan monostable dengan trigger yang diparalel pada trigger kontrol logic pembalik arah, pembuatan rangkaian elektronik penjeda waktu ini bertujuan untuk menghentikan motor sebelum berbalik arah sehingga kerusakan gearbox akibat perpindahan arah putar motor DC tanpa adanya jeda waktu dapat dihindari.
• Rangkaian elektronik penjeda gerak platform dibuat dengan mengadopsi sistem counter pada anemometer menggunakan magnet, hall sensor, IC counter 4020 dan monostable.
3.3.4 Pemasangan Sistem Telemetri dan Rangkaian Sensor
Sistem telemetri dan rangkaian sensor yang dipasang pada platform adalah sistem logging dan pengukuran data berbasis telemetri yang telah di kembangkan oleh laboratorium instrumentasi meteorologi departemen GFM. Sistem telemetri tersebut mampu mengirimkan satu data setiap menit ke perangkat receiver. Perangkat data logger yang dipakai pada penelitian ini adalah seperangkat komputer notebook yang telah dihubungkan dengan interface receiver dan telah dilengkapi dengan perangkat lunak event logger.
IV. HASIL DAN PEMBAHASAN
4.1 Rangkaian gerak mekanis
Platform membutuhkan suatu sistem gerak mekanis agar dapat bergerak vertikal pada lintasan. Dibutuhkan suatu mekanisme gerak mekanis yang dapat digerakkan oleh motor DC. Perancangan mekanisme tersebut menggunakan sistem pulley yang berupa ban karet yang telah diberi alur dengan guidance sebagai penyelaras lintasan.
4.1.1 Pulley
[image:36.595.325.487.612.744.2]Selama masa penelitian dalam perancangan platform telah ujicoba berbagai macam pulley sebagai mekanisme gerak vertikal. Mekanisme yang pertama kali dipakai adalah mekanisme pulley A (gambar 9). Mekanisme pulley A dirancang menggunakan dua buah motor DC untuk menggerakkan dua buah roda karet identik, pada mekanisme ini lintasan dipasang di antara roda karet dengan motor DC yang saling bergerak berlawanan agar lintasan dapat bergerak diantara roda karet.
Setelah diujicoba ternyata gerak platform cenderung lambat akibat lintasan terjepit karena posisi roda yang terlalu rapat. Setelah dirancang ulang dengan merenggangkan posisi roda, ternyata lintasan cenderung selip karena permukaan gesek yang berkurang sehingga platform tidak dapat bergerak naik. Kelemahan lainnya dari mekanisme ini adalah konsumsi energi yang boros akibat penggunaan 2 buah motor DC secara simultan. Kemudian dilakukan perancangan ulang dengan menggunakan mekanisme pulley B (gambar 10) sebagai solusi dari kelemahan sistem pulley mekanisme A.
Gambar 10 Mekanisme pulley B
Pada mekanisme pulley B hanya digunakan satu buah motor DC yang menggerakkan roda karet dengan penambahan
guidance untuk menjepit lintasan agar
[image:37.595.117.290.271.417.2]bergesekan dengan roda karet. Guidance yang dipakai pada mekanisme pulley B dibuat dari bearing kecil yang dipasang di tiga titik disamping roda. Setelah diujicoba ternyata roda karet tidak bergerak dengan baik karena cenderung selip akibat luas permukaan gesek antara roda dan lintasan yang kecil, hal ini diperburuk dengan kejadian lepasnya lintasan dari alur roda karet karena lintasan terlalu bebas bergerak akibat guidance bearing yang terlalu licin sehingga mekanisme panjat menjadi tidak efektif. Dari kedua kegagalan perancangan mekanisme pulley tersebut diketahui kriteria yang tepat dalam perancangan pulley berikutnya, yaitu harus memiliki luas permukaan gesek yang besar dan lintasan tidak boleh terjepit. Dari kriteria tersebut dilakukan perancangan mekanisme pulley yang baru yaitu mekanisme pulley C (gambar 11).
Gambar 11 Mekanisme pulley C
Pada mekanisme C permukaan gesek antara lintasan dan roda karet diperbesar dengan cara melilitkan lintasan pada satu roda karet sehingga luas permukaan gesek menjadi besar dan lintasan tidak terjepit, sehingga diharapkan roda dapat bergerak secara efisien pada lintasan . Dari hasil ujicoba platform dengan mekanisme gerak pulley C dapat bergerak secara efisien pada lintasan tanpa selip serta energi yang dibutuhkan lebih efisien karena hanya menggunakan satu motor DC sebagai penggerak, sehingga mekanisme C adalah mekanisme yang akhirnya digunakan sebagai mekanisme panjat platform.
4.2 Rangkaian gerak elektronik
4.2.1 H-bridge
dan tegangan optimal yang dibutuhkan sesuai spesifikasi h-bridge yang akan dibuat. Sedangkan pemakaian resistor sebesar 4KΩ bertujuan untuk menjenuhkan transistor dengan nilai hfe 60 sehingga kebutuhan arus optimal yang diperlukan motor DC sebesar 200mA pada tegangan 12V dapat dipenuhi. Diketahui dengan rumus
...(1)
...(2)
Keterangan :
Gambar 12 Transistor sebagai saklar
Transistor pada h-bridge dapat terbakar akibat ketidaksesuaian status dimana keempat transistor yang diposisikan sebagai saklar berada dalam status “aktif” (shoot through), sehingga digunakan kombinasi transistor PNP dan NPN dengan tujuan transistor yang berfungsi sebagai saklar aktif secara berpasangan saat mendapat sinyal logic high maupun low agar transistor tidak terbakar karena shoot trough. Mengingat karakteristik transistor PNP yang membutuhkan logic low untuk aktif, sedangkan transistor NPN membutuhkan logic high untuk aktif.
Gambar 13 Aliran arus h-bridge
4.2.2 Kontrol Logic Pembalik Arah
Rangkaian kontrol logic pembalik arah berfungsi untuk membalik sinyal logic yang dialirkan ke basis transistor pada h-bridge sehingga putaran motor DC berbalik arah, mekanisme motor DC berbalik arah ini akan terjadi pada saat platform telah berada diujung lintasan atau dipuncak lintasan sehingga motor DC akan bergerak turun dan akan berbalik arah kembali ketika mencapai awal lintasan atau pangkal lintasan tersebut. Pada awal penelitian rangkaian ini direncanakan menggunakan IC 4069UB hex inverter yang mengubah sinyal low menjadi high maupun sebaliknya. Namun karena IC 4069UB tidak tersedia maka pembuatan kontrol logic pembalik arah disubstitusi dengan menggunakan IC 4066 dengan susunan rangkaian sebagai berikut
Pada rangkaian kontrol logic pembalik arah, sinyal logic akan dirubah oleh rangkaian switch, sehingga output sinyal pada titik A dan titik B akan selalu berlawanan dan motor DC akan berbalik arah ketika mendapat trigger dari monostable. Namun perpindahan arah gerak motor DC terjadi secara langsung tanpa jeda sehingga gigi reduksi pada motor DC rawan mengalami kerusakan, oleh karena itu untuk melindungi motor DC dari kerusakan gigi reduksi akibat perpindahan arah putar secara langsung maka rangkaian kontrol logic pembalik arah diparalel dengan rangkaian monostable pemutus tegangan pada motor DC dengan waktu jeda 2 detik. Sehingga motor DC akan berhenti terlebih dahulu selama 2 detik sebelum akhirnya bergerak kembali.
Gambar 15 Rangkaian monostable pemutus tegangan
4.2.3 Penjeda Gerak Platform
[image:39.595.117.300.306.450.2]Penjeda gerak platform berfungsi untuk menghentikan gerak platform dibeberapa ketinggian tertentu. Prinsip kerja dari rangkaian ini menggunakan sinyal yang diperoleh dari hall sensor dan IC counter yang mendapat input dari jumlah putaran magnet pada roda. Kemudian IC counter mengirimkan sinyal trigger sehingga IC monostable pemutus tegangan aktif dan platform berhenti. Jarak jeda platform ditentukan oleh nilai bit yang dipakai pada counter, sedangkan lama waktu jeda hingga platform bergerak kembali ditentukan oleh kombinasi nilai resistor dan kapasitor yang digunakan pada monostable pemutus tegangan yang mengontrol switch.
Gambar 16 Rangkaian penjeda gerak
Pada gambar diatas terlihat bahwa monostable pemutus tegangan mengontrol switch yang memberikan logic pada transistor, transistor ini berfungsi memutus tegangan yang diperlukan motor DC sehingga motor DC berhenti. Pada basis transistor tersebut harus diberikan jumlah resistansi yang sama dengan transistor pada h-bridge pengontrol motor DC karena transistor tersebut berhubungan langsung dengan rangkaian
h-bridge sehingga tidak mengganggu jumlah
arus yang disediakan oleh h-bridge untuk motor DC. Kemudian pada platform ini digunakan roda berdiameter 4 cm dan nilai bit 26 pada IC counter serta kombinasi nilai resistor 200MΩ dan kapasitor 1µF, sehingga platform akan berhenti setiap mencapai jarak 8meter selama 8,2 menit ketika jumlah putaran roda mencapai 64 kali. Diketahui dengan rumus :
...(3)
. ...(4)
Ke erangan :t
.
4.3 Sensor Sebagai contoh jika ketinggian teoritis yang
telah ditempuh oleh platform adalah 10meter dengan sudut kemiringan vertikal balon sebesar ° dengan simpangan baku perubahan sudut sebesar ° , , maka ketinggian sebenarnya yang telah ditempuh platform adalah 9,63meter dengan persentase error sebesar 3,7%. Diketahui
enga
Sebelum proses pembuatan platform selesai, dilakukan pengujian sensor yang dipakai sebagai alat pengukuran yaitu sensor RH dan sensor suhu. Ujicoba sensor ini dilakukan untuk mempersiapkan sensor yang nantinya akan dipasang pada platform. Sensor tersebut telah dirangkai sedemikian rupa pada rangkaian transmitter telemetri oleh laboratorium Instrumentasi Meteorologi Departemen Geofisika dan Meteorologi. Dengan kemampuan pengiriman sebanyak satu data per menit. Pengiriman data oleh telemetri yang dirangkai dengan sensor tersebut telah diujicoba baik secara horizontal maupun vertikal. Secara horizontal pengiriman data diujicoba dengan cara menempatkan sensor dan transmitter secara berjauhan dengan receiver, dari hasil ujicoba diketahui bahwa data dapat diterima oleh receiver tanpa gangguan hingga jarak maksimal 100meter. Kemudian ujicoba secara vertikal dilakukan dengan memasang sensor dan transmitter pada rangkaian balon gas berukuran sedang sebanyak 200 buah yang dibungkus dengan trashbag, p