2
DESIGN AND TRIAL OF PITCHER IRRIGATION AUTOMATION
Afdhol Arriska Choir1, Budi Indra Setiawan2, Satyanto Krido Saptomo3
Department of Civil and Environmental Engineering, Faculty of Agricultural Technology, Bogor Agricultural University, IPB Darmaga Campus, PO BOX 220, Bogor, West Java, Indonesia.
ABSTRACT
Development of science and technology today make automatic control have important role. It gives us ease to get performance in dynamic system. Automatic control be able to less routine work that operator always do. Automatic control tools have many kinds. Microcontroller ATMega328P is a kind of automatic control. The function is control and record data then save it. Automatic pitcher irrigation system constructions consist on hardware and software. Hardware consist on water level sensor and soil moisture sensor series, microcontroller, stackable SD card shield, real time clock, relay, battery and solenoid valve. Software is a program for microcontroller that used C/C++ language. Each sensor will be calibrated before use. Daily high water level and soil moisture data was data obtained. The data was obtained each 5 minutes. Data in microcontroller was obtained by record data on memory that was set in microcontroller. Calibration results express that microcontroller capability in monitoring high water level and soil moisture has high accuracy. Determination Coefficient calibration equation from the sensor is 0.955 for high water level sensor and 0.887 for soil moisture sensor. Furthermore, set point for control high water level is 5 cm for bottom margin and 14 cm for top margin.
3 Afdhol Arriska Choir. F44080015. 2012. Rancangan dan Uji Coba Otomatisasi Irigasi Kendi. Di bawah bimbingan Budi Indra Setiawan dan Satyanto Krido Saptomo.
RINGKASAN
Perubahan iklim global dan perubahan pola hujan yang terjadi menyebabkan cuaca sulit di prediksi sehingga menimbulkan ketidakpastian ketersediaan air. Karena itu perlu dicari teknologi yang dapat meningkatkan efisiensi pemberian air irigasi. Pada perkembangan ilmu dan teknologi saat ini, kontrol otomatis memiliki peranan yang penting dalam memberikan kemudahan untuk mendapatkan performansi pada sistem dinamik. Kontrol otomatis dapat meniadakan pekerjaan-pekerjaan rutin dan membosankan yang harus dilakukan operator. Perangkat kontrol otomatis bermacam-macam jenisnya. Mikrokontroler ATMega328P merupakan sebuah perangkat kontrol otomatis. Perangkat dapat berfungsi sebagai pengontrol dan pengambil data kemudian menyimpannya sehingga dapat digunakan untuk monitor pergerakan tinggi muka air dalam irigasi kendi.
Tujuan dari penelitian ini adalah merancang dan menguji coba sistem otomatisasi irigasi kendi dalam skala ketinggian air dalam kendi yang dapat mengendalikan kerja valve dalam mengalirkan air irigasi, serta merancang program dengan menggunakan Mikrokontroler sebagai alat pengendali kerja valve.
Dalam perancangannya, skema perancangannya terbagi menjadi dua bagian. Pertama, perancangan perangkat keras yang terdiri dari rangkaian sensor waterlevel dan sensor soil moisture sebagai pendeteksi ketinggian air dalam kendi dan kadar air tanah di sekitar kendi, Mikrokontroler sebagai pengendali, seperangkat komputer untuk menampilkan nilai kadar air tanah dan tinggi muka air, Stackable SD Card dan Real Time Clock sebagai perekam data ke dalam memori, relay sebagai penghubung dan pemutus arus, baterai sebagai pemberi tegangan, dan solenoid valve untuk mengalirkan air. Kedua, perancangan perangkat lunak yaitu berupa program untuk mikrokontroler dalam bahasa C/C++. Setiap sensor yang akan digunakan sebelumnya dilakukan kalibrasi. Data yang didapatkan berupa data harian tinggi muka air dan kadar air tanah.
Pada mikrokontroler data yang diperoleh adalah data hasil pemantauan tinggi muka air dan kadar air tanah setiap lima detik. Data di dalam mikrokontroler di dapat dengan cara merekam data pada memori yang sebelumnya telah ikut terpasang di dalam bagian mikrokontroler.
1
I. PENDAHULUAN
1.1 Latar Belakang
Air merupakan sumberdaya yang sangat diperlukan mahluk hidup baik untuk memenuhi kebutuhan maupun menopang hidupnya secara alami. Kegunaan air yang bersifat universal atau menyeluruh dari setiap aspek kehidupan menjadi semakin berharganya air baik jika dilihat dari segi kuantitas maupun kualitasnya.
Pemanfaatan air tentu akan sangat berkaitan dengan ketersedian dan jenis pemanfaatan seperti pemanfaatan air untuk irigasi, perikanan, peternakan, industri dan lainnya. Adanya berbagai kepentingan dalam pemanfaatan air dapat menimbulkan terjadinya konflik baik dalam penggunaan airnya maupun cara memperolehnya. Seiring dengan bertambahnya penduduk maka persaingan untuk mendapatkan air untuk berbagai macam kepentingan pun terus meningkat.
Irigasi merupakan penambahan air secara buatan untuk mengatasi kekurangan kadar air tanah. Pada dasarnya bermacam-macam cara yang dilakukan dalam melakukan irigasi mempunyai tujuan yang sama, tetapi dalam penerapannya dibutuhkan suatu kondisi yang berbeda. Kondisi tersebut menyesuaikan dengan keadaan lingkungan dan kebutuhan tanaman akan air.
Sistem irigasi yang sering digunakan beragam jenisnya antara lain irigasi kendi, irigasi permukaan, irigasi tetes, irigasi curah, dan sebagainya. Pada sistem irigasi kendi air dirembeskan kedalam tanah di daerah perakaran. Dalam penerapannya irigasi irigasi kendi menggunakan mariot untuk mengisi air kedalam kendi. Hal ini membutuhkan pengecekan berkala volume air di dalam kendi ataupun di dalam tabung mariot. Oleh sebab itu pengendalian pengairan secara otomatis pada irigasi kendi dibutuhkan agar air di dalam kendi selalu berada pada tinggi leher kendi sehingga penyebaran air ke daerah perakaran melalui rembesan dinding kendi merata.
Pengendalian pengairan secara otomatis tersebut dapat dilakukan antara lain dengan melakukan pengendalian pada tinggi muka air dalam kendi. Pengendalian irigasi kendi secara otomatis ini sangat mendukung dikala cuaca yang susah diprediksi akhir-akhir ini akibat adanya perubahan iklim global dan perubahan pola hujan sehingga meningkatkan ketidakpastian ketersediaan air.
Sistem kontrol otomatis saat ini sangat berkembang pesat. Suatu perangkat elektronik dan perangkat mekanik dapat dikendalikan dengan mikrokontroler atau mikroprosesor sehingga dapat menghemat tenaga operator. Selain itu, sistem kontrol memiliki tingkat kestabilan sistem yang tinggi dalam mencapai hasil yang akan diperoleh.
Penelitian ini merupakan bagian kegiatan IMHERE - B2C IPB. Dalam penelitian ini akan dikembangkan sistem otomatisasi irigasi kendi untuk diterepkan pada infrastruktur lahan dan pengairan yang disiapkan pada penelitian ini untuk mendukung keberlanjutan pengembangan pertanian dengan fokus penelitian pada mekanisme buka tutup katup untuk mengisi air kedalam kendi secara otomatis. Mekanisme buka tutup katup yang dilakukan menggunakan mikrokontroler ATMega328P.
1. 2 Tujuan
2
1.3 Manfaat Penelitian
3
II. TINJAUAN PUSTAKA
2.1 Sistem Irigasi Kendi
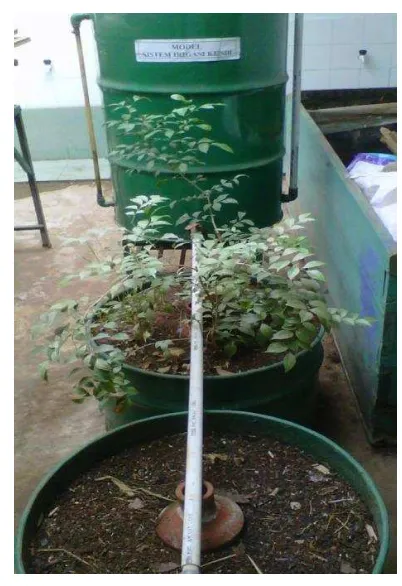
Sistem Irigasi Kendi merupakan salah satu bentuk pemberian air pada tanaman melalui zona perakaran tanaman. Irigasi kendi ini dapat menghemat penggunaan air dengan cara mengatur melalui sifat porositas kendi. Secara operasional, kendi ditanam di bawah tanah dekat dengan zona perakaran tanaman. Jumlah kendi yang ditanam tergantung pada jenis tanaman, kebutuhan air tanaman, suplai air serta porositas tanah dan kendi. Sistem irigasi ini dapat menghemat pemakaian air untuk tanaman di daerah kering dari hasil penelitian menunjukkan distribusi kelembaban tanah dan profil kelembaban tanah selama irigasi dimana jarak horizontal pembasahan mencapai 20 cm dari dinding kendi dan 60 cm secara vertikal setelah terjadi kondisi seimbang. Sehingga mencapai kondisi setimbang dibutuhkan waktu 24 jam setelah irigasi.
Gambar 1. Sistem Irigasi Kendi (Setiawan 2010)
Sistem irigasi kendi (pitcher irrigation), telah banyak dikembangkan sebagai upaya meningkatkan effisiensi penggunaan air irigasi. Penggunaan sistem irigasi kendi antara lain sudah dilakukan pada tanaman melon di India (Mondal, 1974), irigasi di Pakistan (Soomoro, 2002) dan irigasi kendi untuk tanaman hortikultura lahan kering di Indonesia (Setiawan, et al, 1998; Saleh dan Setiawan, 2002; Setiawan, 2000).
4 Irigasi kendi di Indonesia sudah dikembangkan sejak tahun 1996. Penelitian irigasi kendi ini dengan membenamkan kendi dalam tanah pasir berlempung untuk melihat rembesannya. Kendi yang digunakan mempunyai konduktivitas hidrolik jenuh K kendi 3.935x10-10 cm/detik dan hasil rembesan pada saat awal irigasi 1.25 L / hari dan menurun hingga menjadi konstan antara 0.5-0.6 L / hari.
Sedangkan penelitiaan irigasi kendi oleh Setiawan (1996) dengan simulasi distribusi kelembaban tanah menggunakan kelembaban numerik metode beda hingga menunjukkan bahwa distribusi kelembaban tanah ke arah radial dan vertikal berkolerelasi positip dengan K kendi. Apabila K kendi dilakukan di rumah tanaman dengan mengamati laju pembasahan tanah disekitar kendi. Distribusi kelembaban tanah hasil simulasi dan percobaannya penelitiaan dibatasi pada kajian distribusi dan profil kelembaban tanah. Kandungan air tanah dinyatakan sebagai kelembaban tanah dalam bentuk hisapan (h). Model simulasi gerakan air dalam dinding kendi dan tanah dianalisis dengan pendekatan sistem koordinat silender dan simetris putar. Metode numerik elemen hingga digunakan untuk solusi dari model simulasi yang tujuannya untuk mendapatkan distribusi kelembaban tanah dan profilnya untuk menentukan zone penanamn tanaman.
Osmosis adalah peristiwa perpindahan molekul-molekul zat dari larutan berkonsentrasi rendah ke larutan berkonsentrasi tinggi melalui suatu membran semipermeabel tanpa menggunakan energi (transpor pasif). Sedangkan Difusi adalah peristiwa perpindahan molekul-molekul suatu zat dari larutan berkonsentrasi tinggi ke larutan berkonsentrasi rendah tanpa menggunakan energi (transport pasif).
2.2 Sistem Kontrol
2.2.1 Pengertian Sistem Kontrol
Sistem kendali atau sistem kontrol (control sistem) adalah suatu alat (kumpulan alat) untuk mengendalikan, memerintah, dan mengatur keadaan dari suatu sistem. Dalam industri,sistem kontrol merupakan sebuah sistem yang meliputi pengontrolan variabel-variabel seperti temperatur (temperature), tekanan (pressure), aliran (flow), level, dan kecepatan (speed). Untuk mengimplentasikan teknik sistem kontrol (Sistem Control Engineering) dalam industri diperlukan banyak keahlian atau keilmuan seperti dibidang: teknologi mekanik (mechanical engineering), teknik elektrik (electrical engineering), elektronik (electronics) dan sistem pneumatik (pneumaticsistems). Ada dua konsep dasar dalam sistem kontrol yang dikenal yaitu sistem kontrol lup terbuka (open-loop control system) atau umpan-maju (feedforward) dan sistem kontrol lup tertutup (closed-loop control system) atau umpan-balik (feedback) (Hordeski, 1994).
1. Sistem kontrol secara manual
Sistem kontrol secara manual, proses pengaturannya dilakukan secara manual oleh operator dengan mengamati keluaran secara visual, kemudian dilakukan koreksi variabel-variabel kontrolnya untuk mempertahankan hasil keluarannya. Sistem kontrol itu sendiri bekerja secara open loop, yang berarti sistem kontrol tidak dapat melakukan koreksi variabel untuk mempertahankan hasil keluarannya. Perubahan ini dilakukan secara manual oleh operator setelah mengamati hasil keluarannya melalui alat ukur atau indikator.
2. Sistem kontrol otomatis
5 Pengaturan secara untai tertutup ini (closed loop) tidak memerlukan operator untuk melakukan koreksi variabel-variabel kontrolnya karena dilakukan secara otomatis dalam sistem kontrol dalam sistem kontrol itu sendiri (Siswoyo, 2007).
Dengan demikian keluaran akan selalu dipertahankan berada pada kondisi stabil sesuai dengan set point yang ditentukan. Secara umum, sistem kontrol lup tertutup terdiri dari (Mahalik, 2004):
Plant : sistem atau proses yang akan dikontrol yaitu aktuator Input : nilai referensi yang diinginkan atau disebut set point
Alat ukur : alat pengukur yang berfungsi memberikan informasi keadaan yang sebenarnya disebut sensor
Pengontrol : alat/program yang mampu merespon sinyal kontrol agar menghasilkan output yang respek terhadap setpoint dan mengukur present value sehingga menghasilkan isyarat error.
Output : keluaran yang telah dikendalikan dan dihasilkan oleh sistem.
Gambar 2. Kontrol lup tertutup
Dalam sebuah kontrol otomatis suatu kondisi terkontrol (controlled condition) dapat berupa temperatur, tekanan, kelembaban, level, atau aliran. Hal ini mengartikan bahwa elemen pengukuran dapat berupa sensor temperatur, transduser tekanan atau tramitter, detektor level, sensor kelembaban atau sensor aliran. Sementara variabel manipulasinya dapat berupa uap air, air, udara, listrik, minyak atau gas, sedangkan perangkat terkontrol dapat berupa sebuah klep, damper (penghadang), pompa atau kipas angin.
2.2.2 Sensor
Sensor adalah alat untuk mendeteksi/mengukur sesuatu, yang digunakan untuk mengubah variasi mekanis, magnetis, panas, sinar dan kimia menjadi tegangan dan arus listrik. Dalam lingkungan sistem pengendali dan robotika, sensor memberikan kesamaan yang menyerupai mata, pendengaran, hidung, lidah yang kemudian akan diolah oleh kontroler sebagai otaknya.
6 Linieritas: Konversi harus benar-benar proposional, jadi karakteristik konversi
harus linier.
Tidak tergantung temperatur: Keluaran konverter tidak boleh tergantung pada temperatur di sekelilingnya, kecuali sensor suhu.
Kepekaan: Kepekaan sensor harus dipilih sedemikian, sehingga pada nilai-nilai masukan yang ada dapat diperoleh tegangan listrik keluaran yang cukup besar. Waktu tanggapan: Waktu tanggapan adalah waktu yang diperlukan keluaran
sensor untuk mencapai nilai akhirnya pada nilai masukan yang berubah secara mendadak. Sensor harus dapat berubah cepat bila nilai masukan pada sistem tempat sensor tersebut berubah.
Batas frekuensi terendah dan tertinggi: Batas-batas tersebut adalah nilai frekuensi masukan periodik terendah dan tertinggi yang masih dapat dikonversi oleh sensor secara benar.
Stabilitas waktu: Untuk nilai masukan (input) tertentu sensor harus dapat memberikan keluaran (output) yang tetap nilainya dalam waktu yang lama.
Histerisis: Gejala histerisis yang ada pada magnetisasi besi dapat pula dijumpai pada sensor. Misalnya, pada suatu temperatur tertentu sebuah sensor dapat memberikan keluaran yang berlainan.
(Septiawan, 2010).
Empat sifat diantara syarat-syarat dia atas, yaitu linieritas, ketergantungan pada temperatur, stabilitas waktu dan histerisis menentukan ketelitian sensor.
2.2.3 Kontrol On-Off
Dalam kontrol on-off, elemen pembangkit hanya mempunyai dua posisi tertentu yaitu on dan off. Kontrol on-off relatif sederhana dan tidak mahal dan dalam hal ini banyak digunakan dalam sistem kontrol industri maupun domestik.
Ambil sinyal keluaran dari kontroler u(t) tetap pada salah satu nilai maksimum dan minimum tergantung apakah sinyal pembangkit kesalahan positif atau negatif, sehingga
u(t) = U1 untuk e(t)>0 = U2 untuk e(t)<0
dengan U1 dan U2 konstan. Nilai minimum U2 biasanya nol atau –U1. Kontroler on-off umumnya merupakan perangkat listrik dan sebuah katup yang dioperasikan dengan selenoida. Kontroler pneumatik proporsional dengan penguatan yang sangat tinggi bereaksi sebagai kontroler on-off dan terkadang disebut juga kontroler pneumatik on-off.
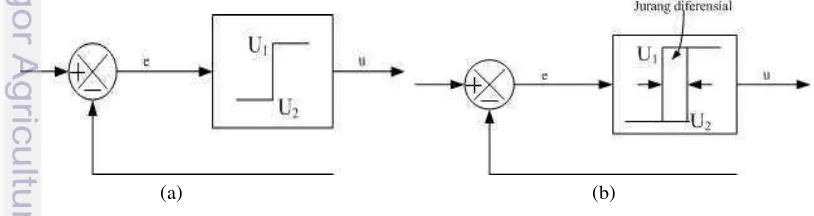
(a) (b)
7 Gambar 3 (a) dan 3 (b) menunjukkan diagram blok kontroler on-off. Daerah dengan sinyal pembangkit kesalahan yang digerakkan sebelum terjadi switching disebut jurang differensial. Jurang differensial ditunjukkan pada Gambar 3 (b). suatu jurang differensial menyebabkan keluaran kontroler u(t) tetap pada nilai awal sampai sinyal pembangkit kesalahan telah bergerak mendekati nilai nol. Dalam beberapa kasus jurang differensial terjadi sebagai akibat adanya penghalang yang tidak dikehendaki dan gerakan yang hilang, sering juga hal ini dimaksudkan untuk mencegah operasi yang berulang-ulang dari mekanisme on-off.
2.2.4 Relay
Relay merupakan salah satu perangkat elektronik yang sering digunakan dalam membuat suatu perangkat keras. Dalam dunia elektronika, relay dikenal sebagai komponen yang dapat mengimplementasikan logika switching. Sebelum tahun 70-an, relay merupakan
“otak” dari rangkaian pengendali. Baru setelah itu muncul PLC yang mulai menggantikan posisi relay. Relay yang paling sederhana ialah relay elektromekanis yang memberikan pergerakan mekanis saat mendapatkan energi listrik (Wicaksono, 2010). Secara sederhana relay elektromekanis ini didefinisikan sebagai berikut:
Alat yang menggunakan gaya elektromagnetik untuk menutup (atau membuka) kontak saklar.
Saklar yang digerakkan (secara mekanis) oleh daya/energi listrik.
Gambar 4. Relay yang beredar di pasaran
Sumber: Killian, 1996
Secara umum, relay digunakan untuk memenuhi fungsi-fungsi berikut:
Remote control: dapat menyalakan atau mematikan alat dari jarak jauh.
Penguatan daya: menguatkan arus atau tegangan (Contoh: starting relay pada mesin mobil).
Pengatur logika kontrol suatu sistem.
Prinsip Kerja dan Simbol
8 Gambar 5. Skema relay elektromekanik
Sumber: Killian, 1996
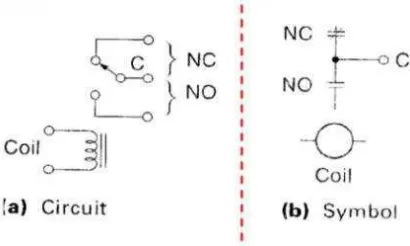
Selain berfungsi sebagai komponen elektronik, relay juga mempunyai fungsi sebagai pengendali sistem, sehingga relay mempunyai 2 macam symbol yang digunakan pada:
Rangkaian listrik (hardware) Program (software)
Simbol yang digunakan pada relay adalah:
Gambar 6. Rangkaian dan simbol logika relay Sumber: Killian, 1996
Simbol selalu mewakili kondisi relay tidak dienergized.
Relay sebagai pengendali
Salah satu kegunaan utama relay dalam dunia industri ialah untuk implementasi
logika kontrol dalam suatu sistem. Sebagai “bahasa pemrograman” digunakan konfigurasi
yang disebut ladder diagram atau relay ladder logic. Relay ladder logic (ladder diagram) memiliki:
Diagram wiring yang khusus digunakan sebagai bahasa pemrograman untuk rangkaian kontrol relay dan switching.
9 Relay Ladder Logic terbagi menjadi 3 komponen yaitu:
1. Input: pemberi informasi 2. Logic: pengambil keputusan 3. Output: usaha yang dilakukan
Gambar 7. Diagram sederhana sistem kontrol berbasis relay
Dari Gambar 7. nampak bahwa sistem kendali dengan relay ini mempunyai input device (misalnya: berbagai macam sensor, switch) dan output device (misalnya : motor, pompa, lampu). Dalam rangkaian logikanya, masing-masing input, output, dan semua komponen yang dipakai mengikuti standard khusus yang unik dan telah ditetapkan secara internasional.
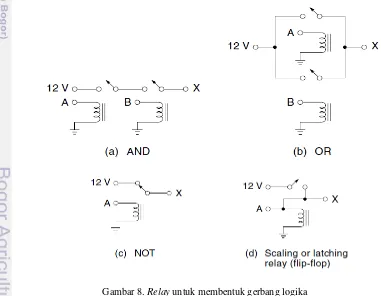
Pada Gambar 8. dapat dilihat aplikasi relay untuk membentuk gerbang – gerbang logika sederhana (AND, OR, NOT, dan latching).
Gambar 8. Relay untuk membentuk gerbang logika
10 Sebagai pengendali, relay dapat mengatur komponen-komponen lain yang membentuk suatu kendali di industri, diantaranya: switch, timer, counter, sequencer, dan lain-lain.
2.2.5 Solenoid Valve
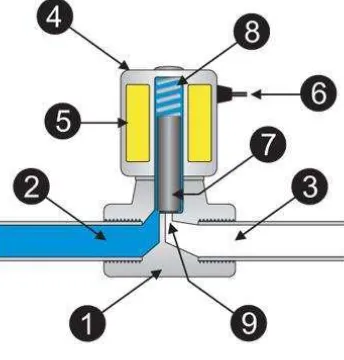
Solenoid valve adalah katup yang digerakan oleh energi listrik, mempunyai kumparan sebagai penggeraknya yang berfungsi untuk menggerakan piston yang dapat digerakan oleh arus AC maupun DC, solenoid valve atau katup (valve) solenoida mempunyai lubang keluaran, lubang masukan dan lubang exhaust, lubang masukan, berfungsi sebagai terminal / tempat cairan masuk atau supply, lalu lubang keluaran, berfungsi sebagai terminal atau tempat cairan keluar yang dihubungkan ke beban, sedangkan lubang exhaust, berfungsi sebagai saluran untuk mengeluarkan cairan yang terjebak saat piston bergerak atau pindah posisi ketika solenoid valve bekerja. Struktur solenoid valve disajikan pada Gambar 9.
Prinsip kerja dari solenoid valve/katup (valve) solenoida yaitu katup listrik yang mempunyai koil sebagai penggeraknya dimana ketika koil mendapat supply tegangan maka koil tersebut akan berubah menjadi medan magnet sehingga menggerakan piston pada bagian dalamnya ketika piston berpindah posisi maka pada lubang keluaran dari solenoid valve akan keluar cairan yang berasal dari supply, pada umumnya solenoid valve mempunyai tegangan kerja 100/200 VAC namun ada juga yang mempunyai tegangan kerja DC.
Gambar 9. Struktur fungsi solenoid valve Keterangan:
1. Valve body
2. Terminal masukan (inlet port) 3. Terminal keluaran (outlet port) 4. Koil solenoid
5. Kumparan
6. Kabel suplai tegangan 7. Plunger
8. Spring
11
2.3 Mikrokontroler
2.3.1 Pengertian Mikrokontroler
Mikrokontroler adalah sebuah sistem komputer fungsional dalam sebuah chip. Di dalamnya terkandung sebuah inti prosesor, memori (sejumlah kecil RAM, memori program, atau keduanya), dan perlengkapan input output.
Dengan kata lain, mikrokontroler adalah suatu alat elektronika digital yang mempunyai masukan dan keluaran serta kendali dengan program yang bisa ditulis dan dihapus dengan cara khusus, cara kerja mikrokontroler sebenarnya membaca dan menulis data. Mikrokontroler merupakan komputer didalam chip yang digunakan untuk mengontrol peralatan elektronik, yang menekankan efisiensi dan efektifitas biaya. Secara harfiahnya bisa
disebut “pengendali kecil” dimana sebuah sistem elektronik yang sebelumnya banyak
memerlukan komponen-komponen pendukung seperti IC TTL dan CMOS dapat direduksi/diperkecil dan akhirnya terpusat serta dikendalikan oleh mikrokontroler ini.
Mikrokonktroler digunakan dalam produk dan alat yang dikendalikan secara automatis, seperti sistem kontrol mesin, remote controls, mesin kantor, peralatan rumah tangga, alat berat, dan mainan. Dengan mengurangi ukuran, biaya, dan konsumsi tenaga dibandingkan dengan mendesain menggunakan mikroprosesor memori, dan alat input output yang terpisah, kehadiran mikrokontroler membuat kontrol elektrik untuk berbagai proses menjadi lebih ekonomis.
Beberapa keuntungan menggunakan mikrokontroler: Sistem elektronik akan menjadi lebih ringkas
Rancang bangun sistem elektronik akan lebih cepet karena sebagian besar dari sitem adalah perangkat lunak yang mudah dimodifikasi.
Pencarian gangguan lebih mudah ditelusuri karena sistemnya yang kompak
Namun demikian tidak sepenuhnya mikrokontroler bisa mereduksi komponen IC TTL dan CMOS yang seringkali masih diperlukan untuk aplikasi kecepatan tinggi atau sekedar menambah jumlah saluran masukan dan keluaran (I/O). Dengan kata lain, mikrokontroler adalah versi mini atau mikro dari sebuah komputer karena mikrokontroler sudah mengandung beberapa periferal yang langsung bisa dimanfaatkan, misalnya port paralel, port serial, komparator, konversi digital ke analog (DAC), konversi analog ke digital dan sebagainya hanya menggunakan sistem minimum yang tidak rumit atau kompleks.
Agar sebuah mikrokontroler dapat berfungsi, maka mikrokontroler tersebut memerlukan komponen eksternal yang kemudian disebut dengan sistem minimum. Untuk membuat sistem minimal paling tidak dibutuhkan sistem clock dan reset, walaupun pada beberapa mikrokontroler sudah menyediakan sistem clock internal, sehingga tanpa rangkaian eksternal pun mikrokontroler sudah beroperasi.Untuk merancang sebuah sistem berbasis mikrokontroler, kita memerlukan perangkat keras dan perangkat lunak, yaitu:
1. Sistem minimal mikrokontroler
2. Software pemrograman dan kompiler, serta downloader.
12 tidakakan berarti bila hanya berdiri sendiri. Pada dasarnya sebuah sistem minimal mikrokontroler AVR memiliki prinsip yang sama, yang terdiri dari 4 bagian, yaitu:
1. Prosesor, yaitu mikrokontroler itu sendiri.
2. Rangkaian reset agar mikrokontroler dapat menjalankan program mulai dari awal. 3. Rangkaian clock, yang digunakan untuk memberi detak pada CPU.
4. Rangkaian catu daya, yang digunakan untuk memberi sumberdaya.
Pada mikrokontroler jenis-jenis tertentu (AVR misalnya), poin-poin pada nomor 2 dan 3 sudah tersedia didalam mikrokontroler tersebut dengan frekuensi yang sudah diseting dari vendornya (biasanya 1MHz, 2MHz, 4MHz dan 8MHz), sehingga pengguna tidak perlu memerlukan rangkaian tambahan, namun bila ingin merancang sistem dengan spesifikasi tertentu (misal ingin komunikasi dengan PC atau handphone), maka pengguna harus menggunakan rangkaian clock yang sesuai dengan karakteristik PC atau HP tersebut, biasanya menggunakan kristal 11,0592 MHz, untuk menghasilkan komunikasi yang sesuai dengan baud rate PC atau HP tersebut.
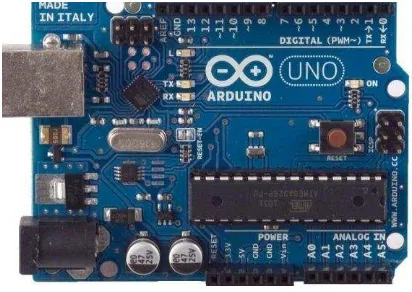
2.3.2 Arduino
Arduino merupakan rangkaian elektronik yang bersifat open source, serta memiliki perangkat keras dan lunak yang mudah untuk digunakan. Arduino dapat mengenali lingkungan sekitarnya melalui berbagai jenis sensor dan dapat mengendalikan lampu, motor, dan berbagai jenis aktuator lainnya. Arduino mempunyai banyak jenis, di antaranya Arduino Uno, Arduino Mega 2560, Arduino Fio, dan lainnya.
(www.arduino.cc)
2.3.3 Arduino Uno
Arduino Uno dengan ATMega328P mempunyai 14 digital input/output (6 diantaranya dapat digunakan untuk PWM output), 6 analog inputs, 16 MHz clock speed, USB connection, power jack, ICSP header, dan reset button. Skema Arduino Uno ATMega328P disajikan pada Gambar 10. dengan ciri-ciri sebagai berikut:
1. Operating voltage 5V.
2. Rekomendasi input voltage 7-12V. 3. Batas input voltage 6-20V
4. Memiliki 14 buah digital input/output 5. Memiliki 6 buah Analog Input.
6. DC current setiap I/O Pin sebesar 40 mA. 7. DC current untuk 3.3V sebesar 50 mA. 8. Flash memory 32 KB.
13 Gambar 10. Skema Arduino Uno
Skema Arduino Uno ATMega328P didasarkan pada blog diagram dari ATMega328P. Blog diagram tersebut disajikan pada Lampiran 2.
2.3.4 Memori-memori ATMega328P
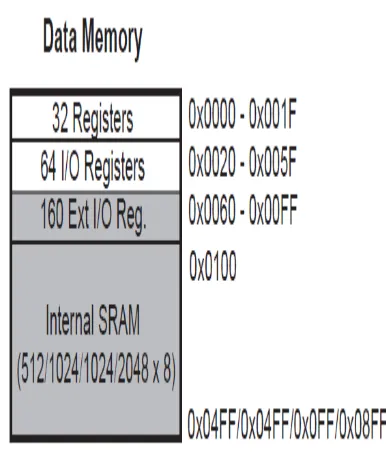
Manajemen memori dalam mikrokontroler penting dilakukan karena memori yang dimiliki mikrokontroler sangat terbatas. Pada Atmega328P terdapat tiga jenis memori, yaitu data memori, program memori, dan EEPROM. BUS ketiga memori tersebut terpisah, sehingga dapat mengakses ketiga jenis memori tersebut dalam waktu yang bersamaan.
ATmega328P menggunakan Flash Memory untuk program memori. Flash Memory dibagi menjadi dua bagian, yaitu Boot Loader dan Aplication Program. Pembagian ini bertujuan untuk keamanan perangkat lunak. Flash Memory memiliki ketahanan tulis atau hapus sebanyak 10.000 kali. Program memory map disajikan pada Gambar 11.
Gambar 11. Program memory map ATMega328P
14 Gambar 12. Data memory map ATMega328P
EEPROM biasa digunakan untuk menyimpan data long-term karena sifatnya yang non-volatile. Ketika tidak mendapat catu daya, data yang tersimpan dalam EEPROM tidak akan hilang. EEPROM memiliki ketahanan tulis atau hapus sebanyak 10.000 kali.
(Atmel 2009).
2.3.5 Arduino-0022
15 Gambar 13. Tampilan Arduino-0022
2.3.6 USART
USART (Universal Synchronous and Asynchronous Serial Receiver and Transmitter) dapat difungsikan sebagai transmisi data sinkron dan asinkron. Sinkron berarti clock yang digunakan antara transmitter dan receiver satu sumber clock. Asinkron berarti transmitter dan receiver memunyai sumber clock yang berbeda. USART terbagi dalam tiga blog yaitu clock generator, transmitter, dan receiver.
(Ardi 2010).
Komunikasi serial ini penting difahami karena selain beberapa interface menggunakan mode serial, komunikasi ini bisa kita manfaatkan sebagai pemantau program saat berjalan (debugging). Misalkan kita akan menganalisis suatu kondisi suhu, ini bisa kita lihat dari monitor dengan ditransmisikan ke komputer secara serial (Ary et al 2008).
2.3.7 Serial Monitor
Pada Arduino-0022 terdapat serial monitor. Serial monitor berfungsi untuk menampilkan data yang terdapat pada Arduino. Selain itu, melalui Serial Monitor juga dapat mengirimkan data ke Arduino. Pengirim data ke Arduino dilakukan dengan cara memasukkan data yang ingin dikirim dan dan menekan tombol send atau menekan enter (www.arduino.cc).
16 Gambar 14. Serial monitor
2.3.8 ADC
ADC atau kepanjangan dari Analog to Digital Converter merupakan alat yang digunakan untuk mengubah data analog menjadi data digital. Pada Arduino Uno sudah terdapat modul ADC, sehingga dapat langsung digunakan. Fitur ADC yang terdapat pada ATmega328P adalah sebagai berikut:
1. Resolusi mencapai 10-bit 2. 0,5 LSB Integral Non-linearity 3. Akurasi mencapai ± 2 LSB 4. Waktu konvensi 13-260 µs. 5. Mempunyai 6 saluran ADC
6. Optional Left Adjustment untuk pembacaan hasil ADC. 7. 0 – Vcc untuk kisaran input ADC
8. Disediakan 1,1V tegangan referensi ADC. 9. Mode konversi kontinyu atau konversi 10. Interupsi ADC
11. Sleep mode noise canceler (Atmel, 2009).
Sinyal input dari port ADC akan dipilih oleh multiplexer (register ADMUX) untuk diproses oleh ADC. Karena converter ADC dalam chip hanya satu buah sedangkan saluran masukannya lebih dari satu, maka dibutuhkan multiplexer untuk memilih input port ADC secara bergantian. ADC memunyai rangkaian untuk mengambil sampel dan hold (menahan) tegangan input ADC, sehingga tetap dalam keadaan konstan selama proses konversi. Sinyal input ADC tidak boleh melebihi tegangan referensi. Nilai digital sinyal input ADC untuk resolusi 10-bit (1024) ditulis dalam Persamaan 1.
17 Nilai digital sinyal input ADC untuk resolusi 8-bit ditulis dalam persamaan 2:
Kode digital = (Vinput / Vref) x 256 (2)
(Andi, 2010).
Dengan demikian untuk mencari nilai digital, dapat dinyatakan dengan persamaan 3.
Kode digital = (Vinput / Vref) x resolusi (3)
2.3.9 Stackable SD Card Shield
Stackable SD card shield merupakan solusi untuk mengirim data ke memory SD card dan TF card. Stackable SD card shield disajikan pada Gambar 15.
Gambar 15. Stackable SD Card Shield
Pinout dari stackable SD card shield dapat dihubungkan ke Arduino Uno, sehingga dapat bermanfaat untuk menambah kapasitas tempat penyimpanan data dan pencatatan data. Stackable SD card shield ini dapat langsung dipasang pada Arduino dan terdapat switch untuk memilih flash card slot. Keistimewaan dari stackable SD card shield ini adalah:
1. Terdapat modul untuk standar SD card dan Micro SD (TF) card. 2. Terdapat switch untuk memilih flash card slot.
18
III. METODOLOGI
3.1 Waktu Dan Tempat Penelitian
Penelitian ini dilaksanakan di Laboratorium Teknik Sumberdaya Air Departemen Teknik Sipil dan Lingkungan, Institut Pertanian Bogor dari bulan Maret – Juni 2012.
3.2 Alat Dan Bahan
3.2.1 Bahan
Mikrokontroler ATMega328P
Sensor Water Level dan Soil Moisture Relay
Kabel
Baterai 12 volt Solenoid Valve Pipa
Kendi Solar Cell 3.2.2 Alat
Komputer
Elektroniks Toll Kits Penggaris
Gergaji Bor
3.3 Tahapan Penelitian
19 Gambar 16. Metode Penelitian
3.3.1 Analisis Sistem
Pada tahap ini dilakukan analisis yang mencakup segala kebutuhan dalam membangun perancangan dan implementasi sistem otomatisasi irigasi kendi dalam hal identifikasi masalah. Identifikasi tersebut meliputi identifikasi irigasi kendi, sensor water level untuk mengukur tinggi muka air dalam kendi, dan mikrokontroler ATMega328P.
3.3.2 Perancangan
Perancangan Software
Pada tahap ini dilakukan penyesuaian program untuk melakukan serangkaian pengujian sistem otomatisasi.
20 Gambar 17. Flow chart perancangan sistem otomatisasi irigasi kendi
Perancangan Hardware
21 Gambar 18. Skema rangkaian hardware
Sensor water level yang digunanakan yaitu eTape Continuous Fluid Level Sensor PN-12110215TC-8. Dimana sensor ini memiliki spesifikasi sebagai berikut:
1. Panjang sensor : 10.1” (257 mm) 2. Panjang sensor aktif : 8.4” (213 mm)
3. Lebar sensor : 1” (25.4 mm)
4. Sensor output : 1500 Ω empty, 300Ω full, ± 10% 5. Resistance gradient : 140Ω / inchi (56Ω/cm), ± 10% 6. Resolusi : < 0,01” (0.25 cm)
7. Actuation depth : Nominal 1” (25.4 mm) 8. Tahanan referensi (Rref) : 1500Ω, ± 10%
9. Ketahanan suhu : 15o F – 150o F (-9o C - 65o C)
10. Daya : 0.5 W (Vmax = 10 V)
22 Gambar 19. Sensor water level
Skema rangkaian dari sensor water level diatas disajikan pada Gambar 20. dimana Vin merupakan pins 1, ground merupakan pins 2 dan Vout merupakan penggabungan pins 3 dan pins 4. Untuk menghitung nilai Vout dapat menggunakan Persamaan 4 seperti di bawah ini.
Vout = I x Rsense (4)
Gambar 20. Rangakain sensor water level
23 ground pada mikrokontroler, dan kaki Vout dihubungkan ke port analog serial A0. Skema rangkaian sensor dengan mikrokontroler disajikan pada Gambar 21.
Gambar 21. Skema rangkaian sensor water level dengan mikrokontroler
Untuk sensor soil moisture rangkaiannya hampir sama dengan rangkaian sensor water level dimana kaki Vin dihubungkan pada port 5v, kaki ground dihubungkan pada port ground pada mikrokontroler, dan kaki Vout dihubungkan pada port analog serial A1 pada mikrokntroler. Skema rangkaiannya disajikan pada Gambar 22.
24 Perbedaan perancangan sensor water level dan sensor soil moisture dapat dilihat pada Tabel 1.
Tabel 1. Perbedaan perancangan sensor water level dan sensor soil moisture No. Keterangan Perancangan menggunakan sensor
water level
Perancangan menggunakan sensor soil moisture
1. Sensor Water level Soil moisture
2. Penyimpanan data Dilakukan Dilakukan
3. Aktuator Ada Tidak ada
4. Kalibrasi Ya Ya
5. Tujuan Sebagai kontrol dan pengambilan
data. Hanya sebagai pengambilan data.
3.3.3 Implementasi
Rancangan dan sistem akan diterapkan pada lingkungan model dan pada percobaan lapang. Sensor dipilih atau diatur agar memiliki nilai keluaran 0-Vcc. Nilai keluaran tersebut dibatasi karena modul ADC hanya bias mengenali input dengan nilai tidak melebihi tegangan referensi. Tegangan referensi yang digunakan sebesar Vcc.
3.3.4 Pengujian
Pengujian dilakukan dengan melakuakan uji sistem sesuai dengan Gambar 23. Aktuator disimulasikan secara real time dengan LED. Sensor memperoleh data yang berasal dari tabung air, dimana ketinggian air pada tabung dapat diatur. Sensor water level terhubung dengan mikrokontroler melalui port 5v, port ground, dan port analog serial A0, LED melalui port digital serial 13, dan komunikasi dengan komputer melalui USB Serial Port. Pada antar muka serial monitor akan ditampilkan nilai dari sensor water level, sehingga dapat mengetahui dan mengamati nilainya.
25 Pada antar muka serial monitor akan ditampilkan pengaturan penggunaan sistem, meliputi:
1. Lama pengambilan data 2. Batas atas air
3. Batas bawah air
Gambar 24. Pengujian sistem
Sebelumnya dilakukan pengecekan terhadapa koneksi dari stackable SD card shield. Setelah koneksi antara stackable SD card shield dan mikrokontroler berhasil, maka akan dilakukan pengaturan penggunaan sistem, yaitu memasukkan nilai dari pengambilan data, batas atas, dan batas bawah.
3.3.5 Percobaan
26 Gambar 25. Percobaaan lapang
Data yang diambil merupakan data pembacaan sensor water level dalam kendi dan pembacaan sensor soil moisture terhadap interval waktu pengukuran. Dari kedua sensor tersebut dapat dilihat perubahan tinggi muka air dalam kendi dan kadar air tanah. Data pembacaan sensor terekam pada memori yang telah terpasang di dalam sistem otomatisasi.
Perekaman data dilakukan setiap 5 detik. Hal ini dikarenakan pengisian air ke dalam kendi melalui aktuator sangat cepat, sehingga dibutuhkan pembacaan sensor yang cepat pula, agar pada saat aktuator on air tidak meluap sampai keluar kendi.
3.3.6 Analisis Percobaan
27
IV. HASIL DAN PEMBAHASAN
4.1 Pengujian Sifat Fisik Tanah Lahan Percobaan
Pengujian sifat fisik tanah dilakukan di balai penelitian tanah kota bogor. Pengujian tanah berupa nilai pF tanah, sifat fisik tanah, dan struktur tanah. Dalam pengujian ini diambil empat buah sampel tanah dari lahan percobaan yang terdiri atas 2 sampel pada kedalaman 5-10 cm dan 2 sampel pada kedalaman 10-15 cm. dari ke empat sampel diambil nilai rata-rata.
Gambar 26. Grafik hubungan nilai pF tanah dengan kadar air tanah
Grafik pada Gambar 26. diatas merupakan grafik hasil pengujian tanah berupa nilai pF tanah dan kadar air tanah. Sumbu absis merupakan nilai pF yang didapatkan dari perhitungan menggunakan model Van Genuchten.
Data di atas nantinya digunakan untuk menentukan nilai kadar air tanah yang harus dijaga pada nilai kadar air tanah pada saat pF antara 4.2 sampai 2.54 agar tanaman tetap tumbuh sampai panen. Pemantauan nilai kadar air tanah digunakan sensor kadar air tanah yang terpasang di antara kendi dan tanaman yang sebelumnya telah dikalibrasi.
4.2 Kalibrasi Sensor
Sensor yang dilakukan kalibrasi berupa sensor water level dan sensor kadar air tanah. Sensor water level digunakan untuk menentukan nilai set point pada sistem agar air dalam kendi tetap terjaga ketinggiannya sehingga sebaran air ke daerah perakaran tanaman selalu merata. Sedangkan untuk sensor kadar air tanah digunakan untuk melihat perubahan kadar air tanah yang terjadi akibat sistem selama sistem bekerja.
Kalibrasi sensor dilakukan untuk menyesuaikan nilai yang diukur manual dengan keluaran dari sensor. Perancangan kalibrasi sensor water level port yang digunakan adalah port 5v, port ground dan port analog serial A0.
Air-entry F.Capacity PW.Point 0.1 0.2 0.3 0.4 0.5 0.6 0.7
0.0 1.0 2.0 3.0 4.0 5.0
V WC ( cm 3/c m 3) pF
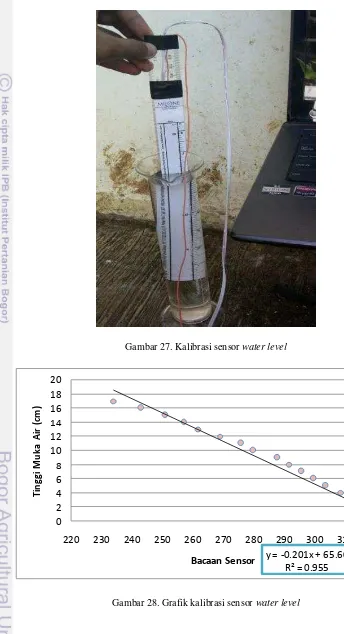
28 Objek yang digunakan adalah air yang berada pada gelas ukur. Kemudian dilakukan pengukuran mulai dari tinggi minimal sampai tinggi maksimal yang dapat dibaca oleh sensor terlihat pada Gambar 27. di bawah ini:
Gambar 27. Kalibrasi sensor water level
y = -0.201x + 65.60 R² = 0.955 0
2 4 6 8 10 12 14 16 18 20
220 230 240 250 260 270 280 290 300 310 320
T
ing
g
i
M
uk
a
A
ir
(c
m
)
[image:30.595.126.430.139.472.2]Bacaan Sensor
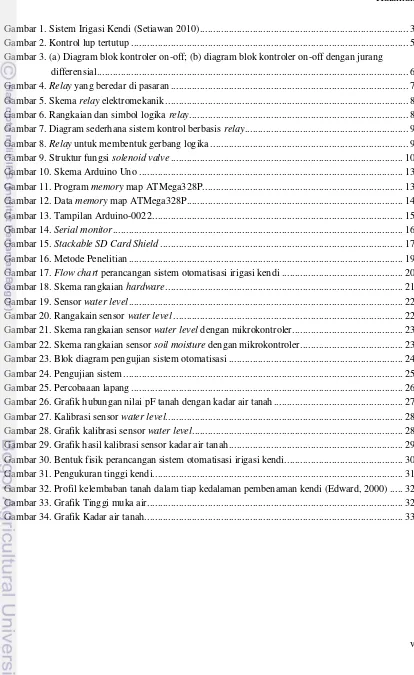
29 Pada grafik Gambar 28. di atas sumbu absis merupakan nilai yang tertampil pada serial monitor arduino-022. Sedangkan sumbu ordinat menunjukkan tinggi muka air yang diukur secara manual dalam satuan cm sebagai tanda kapan harus membaca nilai yang terlihat pada serial monitor.
Dari hasil kalibrasi sensor water level tersebut diperoleh hubungan antara nilai pada sensor dengan nilai tinggi muka air sebenarnya dengan persamaan y=-0.201x + 65.60, persamaan ini dapat digunakan untuk menghitung tinggi muka air sebenarnya dimana y adalah tinggi muka air dalam satuan cm dan x adalah nilai bacaan sensor dalam satuan ekivalen bilangan biner. Adapun nilai koefisien determinasi dari persamaan ini sebesar 0.955. hal ini menunjukkan hasil kalibrasi dapat digunakan dengan tingkat akurasi tinggi.
Selain itu, data kalibrasi water level di atas digunakan sebagai nilai masukan pada program kontrol yang meliputi batas atas dan batas bawah yang didefinisikan sebagai berikut:
Sensor water level : Batas bawah < WaterLevel ≤ Batas atas
Selain itu, dilakukan kalibrasi sensor kadar air tanah dengan perancangan kalibrasi sensor kadar air tanah. Port yang digunakan adalah port 5v, port ground dan port analog serial A1.
Objek yang digunakan adalah tanah yang telah dikeringkan pada suhu 105 oC selama 24 jam. Kemudian dilakukan pengukuran mulai dari kadar air tanah nol persen sampai pada kadar air tanah jenuh yaitu 43.75 persen.
y = 0.092x - 15.48 R² = 0.887 0.00 5.00 10.00 15.00 20.00 25.00 30.00 35.00 40.00 45.00 50.00
0 100 200 300 400 500 600
K a d a r A ir T a n a h (% )
Bacaan Sensor
Gambar 29. Grafik hasil kalibrasi sensor kadar air tanah
Pada grafik Gambar 29. di atas sumbu absis merupakan nilai yang tertampil pada serial monitor arduino-022. Sedangkan sumbu ordinat menunjukkan kadar air tanah yang diukur secara manual dengan perlakuan penambahan air sebesar 50 mL.
30
4.3 Rangkaian Sistem Otomatisasi
Rangkaian sistem otomatisasi irigasi kendi dapat dibagi menjadi tiga blok, yaitu blok I sebagai rangkaian input, blok II sebagai rangkaian pengendali sistem, dan blok III sebagai rangkaian output. Bentuk fisik dari rangkaian sistem otomatisasi irigasi kendi yang telah selesai dibangun ditunjukkan oleh Gambar 30.
Blok I terdiri atas satu buah sensor water level dan satu buah sensor kadar air tanah, dimana sensor water level digunakan untuk mendeteksi ketinggian air dalam kendi dan sensor kadar air tanah untuk mendeteksi nilai kadar air tanah yang telah terbasahkan oleh rembesan kendi. Port yang digunakan untuk sensor water level adalah port 5 volt, port ground, dan port analog serial A0. Sedangkan untuk sensor kadar air tanah digunakan port 5 volt, port ground dan port analog serial A1. Blok II terdapat komponen mikrokontroler ATMega328P yang berfungsi sebagai pengolah keseluruhan data input analog pada sensor water level dan sensor kadar air tanah untuk mendapatkan nilai ketinggian air di dalam kendi dan kadar air tanah di daerah pembasahan kendi. Data yang diperoleh sebagai masukan kontrol kemudian diolah oleh mikrokontroler, sehingga dihasilkan keluaran. Pada blok mikrokontroler juga dipasang SD modul untuk merekam data hasil pembacaaan sensor dan real time clock untuk membuat perekaman data yang disertai dengan waktu pengukuran. Real time clock (RTC) dipasang pada port ground, port 5 volt, port analog serial A4, dan port analog serial A5. Terdapat beberapa rangkaian pada blok II, antara lain baterai 12 volt yang telah dihubungkan ke solar cell sebagai daya sistem, relay sebagai scalar otomatis untuk menghidupkan dan mematikan sistem, dan doubler 12 volt to 24 volt sebagai penguat arus dari baterai ke solenoid valve.
Blok III adalah rangkaian relay dan solenoid valve yang berfungsi sebagai pembuka tutup aliran air yang akan masuk ke dalam kendi. Port yang digunakan unutk relay adalah port digital serial 8 dan port ground.
Gambar 30. Bentuk fisik perancangan sistem otomatisasi irigasi kendi
4.4 Pemantauan Bacaan Sensor
31 Modul ADC terletak pada port C dari mikrokontroler atau biasa disebut dengan port analog. Arduino Uno mempunya 6 port analog yang dapat digunakan untuk membaca masukan dari sensor.
Data monitoring didapat dari dua sensor yang terpasang pada sistem, yaitu sensor water level dan sensor kadar air tanah yang terhubung dengan mikrokontroler ATMega328P. Pengambilan data dilakukan dengan memasang stackable SD card shield dan real time clock pada sistem kontrol untuk merekam data yang kemudian data di ambil setiap hari selama pengamatan.
Pengaturan tinggi muka air dalam kendi dibuat berdasarkan tinggi kendi dan tinggi simpanan air dalam kendi. Tinggi kendi sampai leher kendi dari pengukuran sebesar 14 cm yang terlihat pada Gambar 31. dan untuk tinggi simpanan kendi diambil sebesar 5 cm dari dasar kendi hal ini dikarenakan pada saat air kendi berada pada ketinggian 5 cm, rembesan air dalam kendi masih berada 23 cm horizontal di daerah perakaran kendi seperti terlihat pada Gambar 32. Selain itu, penentuan tinggi bawah sebesar 5 cm dikarenakan supply dari aktuator sangat besar, sehingga dibutuhkan rentan yang cukup tinggi agar air tidak meluap keluar kendi.
32 Gambar 32. Profil kelembaban tanah dalam tiap kedalaman pembenaman kendi (Edward, 2000)
Voltase yang digunakan untuk menjalankan sensor sebesar 5 volt yang diambil dari baterai 12 volt melalui port input voltase dari mikrokontroler. Data hasil pemantauan tinggi muka air disajikan pada Gambar 33.
Sumbu absis pada grafik menunjukkan waktu selama pelaksanaan pengambilan data sementara sumbu ordinat primary merupakan tinggi muka air (cm) yang telah dikonversi dari bentuk asal data keluaran dari serial monitor dengan menggunakan persamaan kalibrasi yang sebelumnya telah dilakukan. Sedangkan sumbu ordinat secondary merupakan nilai aktuator dimana ketika on diberi nilai 1 dan ketika off diberi nilai 0.
0 1 0.000 2.000 4.000 6.000 8.000 10.000 12.000 14.000 16.000 18.000 20.000 8 :2 4 :0 0 9 :3 6 :0 0 1 0 :4 8 :0 0 1 2 :0 0 :0 0 1 3 :1 2 :0 0 1 4 :2 4 :0 0 1 5 :3 6 :0 0 1 6 :4 8 :0 0 T ing g i M uk a A ir ( cm ) Waktu
Gambar 33. Grafik Tinggi muka air
33
solenoid valve berukuran ¾” cukup besar. Sehingga bias digunakan solenoid valve yang berukuran lebih kecil.
Untuk sensor kadar air tanah voltase yang digunakan untuk menjalankan sensor sebesar 5 volt melalui port input voltase dari mikrokontroler. Data hasil pemantauan kadar air tanah disajikan pada Gambar 34.
0.340 0.345 0.350 0.355 0.360 0.365 0.370 8 :2 4 :0 0 9 :3 6 :0 0 1 0 :4 8 :0 0 1 2 :0 0 :0 0 1 3 :1 2 :0 0 1 4 :2 4 :0 0 1 5 :3 6 :0 0 1 6 :4 8 :0 0 K a da r A ir T a na h (c m 3/ cm 3) Waktu
Gambar 34. Grafik Kadar air tanah
Sumbu absis pada grafik menunjukkan waktu selama pelaksanaan pengambilan data sementara sumbu ordinat merupakan kadar air tanah (cm3/cm3) yang telah dikonversi dari bentuk asal data keluaran dari serial monitor dengan menggunakan persamaan kalibrasi yang sebelumnya telah dilakukan.
34
V. PENUTUP
5.1 KESIMPULAN
1. Perancangan alat otomatisasi irigasi kendi ini merupakan perpaduan antara software dan hardware. Software dirancang dengan menggunakan bahasa C/C++. Sedangkan hardware terdiri atas relay, sensor, solenoid valve, baterai, mikrokontroler, stackable SD card shield, real time clock, dan doubler 12v to 24v.
2. Kemampuan mikrokontroler ATMega328P dalam memantau tinggi muka air memiiliki tingkat keakuratan yang tinggi, dengan nilai koefisien determinasi persamaan kalibrasi dari sensor yang digunakan yaitu sebesar 0.955. selain itu, dapat juga memantau kadar air tanah dengan nilai koefisien determinasi persamaan kalibrasi dari sensor yaitu 0.887.
3. Daya baterai yang digunakan untuk menjalankan alat kontrol masih kurang memadai karena tanpa supply listrik baterai hanya dapat dipakai untuk satu kontrol saja. Selain itu penggunaan doubler sangat boros terhadap baterai
4. Sistem kontrol berfungsi dengan baik dalam melakukan pengaturan dan pemantauan tinggi muka air secara otomatis. Akan tetapi masih banyak yang perlu diperbaiki, diantaranya tegangan yang keluar kurang stabil sehingga dapat mengganggu pembacaan sensor dan pengaktifan relay.
5.2 SARAN
1. Perlu dilakukan pengujian kembali untuk menghasilkan data yang lebih valid.
2. Dilihat dari daya baterai yang kurang memadai sehingga terjadi error pada saat sistem kontrol berjalan, maka sebaiknya digunakan baterai dengan daya yang lebih besar. Misalnya daya baterai yang semula 12V 45Ah diganti dengan baterai berdaya lebih besar dalam ampere hour nya.
1
RANCANGAN DAN UJI COBA OTOMATISASI IRIGASI KENDI
SKRIPSI
AFDHOL ARRISKA CHOIR
F44080015
FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR
35
DAFTAR PUSTAKA
Agustina, Riskiyah. 2011. Pengujian Sistem Irigasi Kendi Lapindo Pada Tanaman Lada Perdu (Piper Ningrum L); Skripsi. Fakultas Teknologi Pertanian, Institut Pertanian Bogor. Bogor.
Andi Dwi Cahyo, 2011. Analisis Unjuk Kerja Pengontrolan Tinggi Muka Air Pada Sistem Irigasi Otomatis Menggunakan Perangkat Berbasis Mikrokontroler; Skripsi. Fakultas Teknologi Pertanian, Institut Pertanian Bogor. Bogor.
Andrian, Evi. 2010. Pengertian Sistem Kendali. [terhubung berkala], http://eviandrianimosy.blogspot.com. [3 Mei 2012].
[Anonim]. Arduino. [terhubung berkala] http://arduino.com. [19 Juni 2012].
[Anonim]. Arduino Uno. [terhubung berkala] http://arduino.cc/en/Main/ArduinoBoardUno. [19 Juni 2012].
[Anonim]. Stackable SD Card Shield. [terhubung berkala]
http://www.famosastudio.com/arduino/shields/arduino-stackable-sd-card-shield. [19 Juni 2012]
Atmel. 2009. 8-bit AVR microcontroller with 4/8/16/32K Bytes In-System Programmable Flash ATMega48PA/ATMega88PA/ATMega168PA/ATMega328P. orchard Parkway San Jose: Atmel Corporation.
Bolton, W. 2006. Sistem Instrumentasi dan Sistem Kontrol. Erlangga. Jakarta.
Edward. 2000. Kinerja Sistem Irigasi Kendi untuk Tanaman di Daerah Kering; Disertasi. Program Pascasarjana, Institut Pertanian Bogor. Bogor.
Fathurahman, Fauzi. 2011. Perancangan dan Implementasi Logika Fuzzy pada Mikrokontroler ATMega16 untuk Robot Penghindar Halangan; Skripsi, Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Pertanian Bogor, Bogor.
Gunawan, Randi. 2008. Analisis Sumberdaya Air Daerah Aliran Sungai Bah Bolon Sebagai Sarana Pendukung Pengembangan Wilayah Di Kabupaten Simalungun dan Asahan, Wahana Hijau Jurnal Perencanaan dan Pengembangan Wilayah Vol. 2 No. 1 Agustus 2008.
Hordeski, M. 1994. Transducers for Automation. Van Nostrand Reinhold Company. New York.
Kilian, C.T. 1996. Modern Control Technology: Components and Systems, West Publishing Co.
Nugroho, Akbar Riyan, 2011. Rancang Bangun Modul Akuisisi Data Untuk Sistem Irigasi Otomatis Berbasis Mikrokontroler Arduino Duemilanove; Skripsi. Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Pertanian Bogor. Bogor.
36 Setiawan, B.I. 1998. Sistem Irigasi Kendi untuk Tanaman Sayuran di Daerah Kering. Laporan Riset Unggulan Terpadu IV. Fakultas Teknologi Pertanian, Institut Pertanian Bogor, Bogor. 125 hlm.
Septiawan, F. 2010. Pengertian Sensor. [terhubung berkala]. http:// farisseptiawan. blogspot. com/2010/03/pengertian-sensor.html [19 Juni 2012].
Siswoyo, B. 2007. Pengantar Tentang Sistem Kontrol. [ terhubung berkala ]. http:// elektro. brawijaya.ac.id/bsw/kuliah-1/sistem-kontrol/dasar-dasar-sistem-kontrol/ [19 Juni 2012].
Sutawan, Nyoman. 2001. Pengelolaan Sumberdaya Air Untuk Pertanian Berkelanjutan Masalah Dan
Saran Kebijaksanaan. Seminar ”Optimalisasi Pemanfaatan Sumberdaya Tanah dan Air yang
Tersedia untuk Keberlanjutan Pembangunan, Khususnya Sektor Pertanian”. Fakultas Pertanian Universitas Udayana pada tanggal 28 April 2001.
Wardana, Meri. 2011. Prinsip Kerja Solenoid Valve. [terhubung berkala] http://meriwardana.blogspot.com/2011/11/solenoid-valve.html. [19 juni 2012]
Wicaksono, H. 2010. Automasi 1 ( Bab 2. Relay-Prinsip dan Aplikasi). Teknik Elektro, Universitas Kristen Petra. Surabaya.
1
RANCANGAN DAN UJI COBA OTOMATISASI IRIGASI KENDI
SKRIPSI
AFDHOL ARRISKA CHOIR
F44080015
FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR
2
DESIGN AND TRIAL OF PITCHER IRRIGATION AUTOMATION
Afdhol Arriska Choir1, Budi Indra Setiawan2, Satyanto Krido Saptomo3
Department of Civil and Environmental Engineering, Faculty of Agricultural Technology, Bogor Agricultural University, IPB Darmaga Campus, PO BOX 220, Bogor, West Java, Indonesia.
ABSTRACT
Development of science and technology today make automatic control have important role. It gives us ease to get performance in dynamic system. Automatic control be able to less routine work that operator always do. Automatic control tools have many kinds. Microcontroller ATMega328P is a kind of automatic control. The function is control and record data then save it. Automatic pitcher irrigation system constructions consist on hardware and software. Hardware consist on water level sensor and soil moisture sensor series, microcontroller, stackable SD card shield, real time clock, relay, battery and solenoid valve. Software is a program for microcontroller that used C/C++ language. Each sensor will be calibrated before use. Daily high water level and soil moisture data was data obtained. The data was obtained each 5 minutes. Data in microcontroller was obtained by record data on memory that was set in microcontroller. Calibration results express that microcontroller capability in monitoring high water level and soil moisture has high accuracy. Determination Coefficient calibration equation from the sensor is 0.955 for high water level sensor and 0.887 for soil moisture sensor. Furthermore, set point for control high water level is 5 cm for bottom margin and 14 cm for top margin.
3 Afdhol Arriska Choir. F44080015. 2012. Rancangan dan Uji Coba Otomatisasi Irigasi Kendi. Di bawah bimbingan Budi Indra Setiawan dan Satyanto Krido Saptomo.
RINGKASAN
Perubahan iklim global dan perubahan pola hujan yang terjadi menyebabkan cuaca sulit di prediksi sehingga menimbulkan ketidakpastian ketersediaan air. Karena itu perlu dicari teknologi yang dapat meningkatkan efisiensi pemberian air irigasi. Pada perkembangan ilmu dan teknologi saat ini, kontrol otomatis memiliki peranan yang penting dalam memberikan kemudahan untuk mendapatkan performansi pada sistem dinamik. Kontrol otomatis dapat meniadakan pekerjaan-pekerjaan rutin dan membosankan yang harus dilakukan operator. Perangkat kontrol otomatis bermacam-macam jenisnya. Mikrokontroler ATMega328P merupakan sebuah perangkat kontrol otomatis. Perangkat dapat berfungsi sebagai pengontrol dan pengambil data kemudian menyimpannya sehingga dapat digunakan untuk monitor pergerakan tinggi muka air dalam irigasi kendi.
Tujuan dari penelitian ini adalah merancang dan menguji coba sistem otomatisasi irigasi kendi dalam skala ketinggian air dalam kendi yang dapat mengendalikan kerja valve dalam mengalirkan air irigasi, serta merancang program dengan menggunakan Mikrokontroler sebagai alat pengendali kerja valve.
Dalam perancangannya, skema perancangannya terbagi menjadi dua bagian. Pertama, perancangan perangkat keras yang terdiri dari rangkaian sensor waterlevel dan sensor soil moisture sebagai pendeteksi ketinggian air dalam kendi dan kadar air tanah di sekitar kendi, Mikrokontroler sebagai pengendali, seperangkat komputer untuk menampilkan nilai kadar air tanah dan tinggi muka air, Stackable SD Card dan Real Time Clock sebagai perekam data ke dalam memori, relay sebagai penghubung dan pemutus arus, baterai sebagai pemberi tegangan, dan solenoid valve untuk mengalirkan air. Kedua, perancangan perangkat lunak yaitu berupa program untuk mikrokontroler dalam bahasa C/C++. Setiap sensor yang akan digunakan sebelumnya dilakukan kalibrasi. Data yang didapatkan berupa data harian tinggi muka air dan kadar air tanah.
Pada mikrokontroler data yang diperoleh adalah data hasil pemantauan tinggi muka air dan kadar air tanah setiap lima detik. Data di dalam mikrokontroler di dapat dengan cara merekam data pada memori yang sebelumnya telah ikut terpasang di dalam bagian mikrokontroler.
4
RANCANGAN DAN UJI COBA OTOMATISASI IRIGASI KENDI
SKRIPSI
Sebagai salah satu syarat untuk memperoleh gelar SARJANA TEKNIK
Pada Departemen Teknik Sipil dan Lingkungan, Fakultas Teknologi Pertanian,
Institut Pertanian Bogor
Oleh:
AFDHOL ARRISKA CHOIR
F44080015
FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR BOGOR
5 Judul Skripsi : Rancangan dan Uji Coba Otomatisasi Irigasi Kendi.
Nama : Afdhol Arriska Choir
NIM : F44080015
Menyetujui,
Pembimbing Akademik I Pembimbing Akademik II
Prof. Dr. Ir. Budi Indra Setiawan, M.Agr Dr. Satyanto Krido Saptomo, STP. MSi
NIP. 19600628 198503 1 002 NIP. 19730411 200501 1 002
Mengetahui:
Ketua Departemen Teknik Sipil dan Lingkungan
Prof. Dr. Ir. Asep Sapei, MS NIP. 19561025 198003 1 003
6
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI
Saya menyatakan dengan sebenar-benarnya bahwa skripsi dengan judul Rancangan Dan Uji Coba Otomatisasi Irigasi Kendi adalah hasil karya saya sendiri dengan arahan Dosen Pembimbing Akademik, dan belum diajukan dalam bentuk apapun pada perguruan tinggi manapun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.
Bogor, Juli 2012
Yang membuat pernyataan
7 © Hak cipta milik Afdhol Arriska Choir, tahun 2012
Hak cipta dilindungi
Dilarang mengutip dan meperbanyak tanpa izin tertulis dari
i
BIODATA PENULIS
Penulis dilahirkan di Pamekasan, 21 April 1991 dari pasangan
Bapak Admoyadi Sam’an dan Ibu Chairun Nisa’. Penulis
melaksanakan pendidikannya dari SDN Barurambat kota II
Pamekasan dan Madrasah Ibtidaiyah Bustanul Ma’Arif
ii
KATA PENGANTAR
Alhamdulillahirabbil’alamin, segala puji bagi Allah SWT yang telah memberikan kenikmatan iman sehingga bisa mengotimalkan potensi-potensi yang telah Allah berikan. Skripsi yang berjudul Rancangan dan Uji Coba Otomatisasi Irigasi Kendi dapat diselesaikan karena nikmat Allah berupa akal untuk berfikir, ilmu yang bermanfaat, serta hati yang tergerak untuk melakukan hal yang bermanfaat. Sholawat serta salam saya tujukan kepada Nabi Muhammad SAW, keluarganya, sahabat-sahabatnya, hingga umatnya hingga akhir zaman, dan semoga kita bisa mengikuti sunah beliau sehingga selamat dunia akhirat. Terima kasih kepada IPB melalui hibah penelitian IMHERE IPB atas dukungan dana dan penyediaan alat dalam pengerjaan penelitian ini.
Penulis menyadari bahwa tugas akhir ini dapat terselesaikan karena dukungan dan doa dari berbagai pihak. Pada kesempatan ini penulis ingin mengucapkan terima kasih kepada:
1. Orang tua tercinta, bapak Admoyadi Sam’an dan ibu Chairun Nisa’, adik-adik saya Yud
Karismollah Choir, Anna Fiz A’yun Mardhatillah Choir, dan Qolibun Ghalidh Choir.
Semoga Allah membalas kebaikan serta doa-doa kalian.
2. Bapak Prof. Dr. Ir. Budi Indra Setiawan, M.Agr dan bapak Dr. Satyanto Krido Saptomo, STP, M.Si selaku dosen pembimbing tugas akhir. Terima kasih atas kesabaran serta ilmu yang diberikan, semoga Allah mencatatnya sebagai amalan kebaikan.
3. Bapak Dr. Yudi Chadirin, STP., M.Agr selaku dosen penguji pada ujian skripsi. Semoga saya bias segera memperbaiki tulisan ini dari masukan yang bapak berikan.
4. Teman seperjuangan di lab wageningen, Anton, Ferri, Rahmat, dan Wem. Terima kasih kerjasama dan dukungannya.
5. Seluruh keluarga yang ada di lab wageningen, Mas Mul, Mas wiranto, Mas Khamdan, Pak Sakti, Bang Fadli, Pak Fandi. Terima kasih atas bantuannya.
6. Sahabat-sahabat satu perjuangan SIL’45. Semoga kita tetap istiqomah menggapai ridho Ilahi. Tetap berjuang dan terus berkarya. SIL WOW.
7. Abieta Fellyanti Bhuwana Putri yang selalu memberi semangat dan dukungan kepada penulis.
8. Teman-teman GASISMA dan Pondok D’QAKA. Terima kasih.
9. Seluruh staf Departemen Teknik Sipil dan Lingkungan IPB yang telah banyak membantu baik selama perkuliahan maupun selama penelitian.
Penulis meminta maaf karena menyadari bahwa dalam penulisan tugas akhir ini masih terdapat banyak kekurangan dan kelemahan dalam berbagai hal, karena keterbatasan penulis. Penulis berharap semoga tugas akhir ini bermanfaat.
Bogor, Juli 2012
iii
DAFTAR ISI
Halaman
iv
DAFTAR TABEL
Halaman
v
DAFTAR GAMBAR
[image:51.595.109.523.142.817.2]Halaman
Gambar 1. Sistem Irigasi Kendi (Setiawan 2010) ... 3 Gambar 2. Kontrol lup tertutup ... 5 Gambar 3. (a) Diagram blok kontroler on-off; (b) diagram blok kontroler on-off dengan jurang
vi
DAFTAR LAMPIRAN
Halaman
1
I. PENDAHULUAN
1.1 Latar Belakang
Air merupakan sumberdaya yang sangat diperlukan mahluk hidup baik untuk memenuhi kebutuhan maupun menopang hidupnya secara alami. Kegunaan air yang bersifat universal atau menyeluruh dari setiap aspek kehidupan menjadi semakin berharganya air baik jika dilihat dari segi kuantitas maupun kualitasnya.
Pemanfaatan air tentu akan sangat berkaitan dengan ketersedian dan jenis pemanfaatan seperti pemanfaatan air untuk irigasi, perikanan, peternakan, industri dan lainnya. Adanya berbagai kepentingan dalam pemanfaatan air dapat menimbulkan terjadinya konflik baik dalam penggunaan airnya maupun cara memperolehnya. Seiring dengan bertambahnya penduduk maka persaingan untuk mendapatkan air untuk berbagai macam kepentingan pun terus meningkat.
Irigasi merupakan penambahan air secara buatan untuk mengatasi kekurangan kadar air tanah. Pada dasarnya bermacam-macam cara yang dilakukan dalam melakukan irigasi mempunyai tujuan yang sama, tetapi dalam penerapannya dibutuhkan suatu kondisi yang berbeda. Kondisi tersebut menyesuaikan dengan keadaan lingkungan dan kebutuhan tanaman akan air.
Sistem irigasi yang sering digunakan beragam jenisnya antara lain irigasi kendi, irigasi permukaan, irigasi tetes, irigasi curah, dan sebagainya. Pada sistem irigasi kendi air dirembeskan kedalam tanah di daerah perakaran. Dalam penerapannya irigasi irigasi kendi menggunakan mariot untuk mengisi air kedalam kendi. Hal ini membutuhkan pengecekan berkala volume air di dalam kendi ataupun di dalam tabung mariot. Oleh sebab itu pengendalian pengairan secara otomatis pada irigasi kendi dibutuhkan agar air di dalam kendi selalu berada pada tinggi leher kendi sehingga penyebaran air ke daerah perakaran melalui rembesan dinding kendi merata.
Pengendalian pengairan secara otomatis tersebut dapat dilakukan antara lain dengan melakukan pengendalian pada tinggi muka air dalam kendi. Pengendalian irigasi kendi secara otomatis ini sangat mendukung dikala cuaca yang susah diprediksi akhir-akhir ini akibat adanya perubahan iklim global dan perubahan pola hujan sehingga meningkatkan ketidakpastian ketersediaan air.
Sistem kontrol otomatis saat ini sangat berkembang pesat. Suatu perangkat elektronik dan perangkat mekanik dapat dikendalikan dengan mikrokontroler atau mikroprosesor sehingga dapat menghemat tenaga operator. Selain itu, sistem kontrol memiliki tingkat kestabilan sistem yang tinggi dalam mencapai hasil yang akan diperoleh.
Penelitian ini merupakan bagian kegiatan IMHERE - B2C IPB. Dalam penelitian ini akan dikembangkan sistem otomatisasi irigasi kendi untuk diterepkan pada infrastruktur lahan dan pengairan yang disiapkan pada penelitian ini untuk mendukung keberlanjutan pengembangan pertanian dengan fokus penelitian pada mekanisme buka tutup katup untuk mengisi air kedalam kendi secara otomatis. Mekanisme buka tutup katup yang dilakukan menggunakan mikrokontroler ATMega328P.
1. 2 Tujuan
2
1.3 Manfaat Penelitian
3
II. TINJAUAN PUSTAKA
2.1 Sistem Irigasi Kendi
[image:55.595.217.418.298.591.2]Sistem Irigasi Kendi merupakan salah satu bentuk pemberian air pada tanaman melalui zona perakaran tanaman. Irigasi kendi ini dapat menghemat penggunaan air dengan cara mengatur melalui sifat porositas kendi. Secara operasional, kendi ditanam di bawah tanah dekat dengan zona perakaran tanaman. Jumlah kendi yang ditanam tergantung pada jenis tanaman, kebutuhan air tanaman, suplai air serta porositas tanah dan kendi. Sistem irigasi ini dapat menghemat pemakaian air untuk tanaman di daerah kering dari hasil penelitian menunjukkan distribusi kelembaban tanah dan profil kelembaban tanah selama irigasi dimana jarak horizontal pembasahan mencapai 20 cm dari dinding kendi dan 60 cm secara vertikal setelah terjadi kondisi seimbang. Sehingga mencapai kondisi setimbang dibutuhkan waktu 24 jam setelah irigasi.
Gambar 1. Sistem Irigasi Kendi (Setiawan 2010)
Sistem irigasi kendi (pitcher irrigation), telah banyak dikembangkan sebagai upaya meningkatkan effisiensi penggunaan air irigasi. Penggunaan sistem irigasi kendi antara lain sudah dilakukan pada tanaman melon di India (Mondal, 1974), irigasi di Pakistan (Soomoro, 2002) dan irigasi kendi untuk tanaman hortikultura lahan kering di Indonesia (Setiawan, et al, 1998; Saleh dan Setiawan, 2002; Setiawan, 2000).
4 Irigasi kendi di Indonesia sudah dikembangkan sejak tahun 1996. Penelitian irigasi kendi ini dengan membenamkan kendi dalam tanah pasir berlempung untuk melihat rembesannya. Kendi yang digunakan mempunyai konduktivitas hidrolik jenuh K kendi 3.935x10-10 cm/detik dan hasil rembesan pada saat awal irigasi 1.25 L / hari dan menurun hingga menjadi konstan antara 0.5-0.6 L / hari.
Sedangkan penelitiaan irigasi kendi oleh Setiawan (1996) dengan simulasi distribusi kelembaban tanah menggunakan kelembaban numerik metode beda hingga menunjukkan bahwa distribusi kelembaban tanah ke arah radial dan vertikal berkolerelasi positip dengan K kendi. Apabila K kendi dilakukan di rumah tanaman dengan mengamati laju pembasahan tanah disekitar kendi. Distribusi kelembaban tanah hasil simulasi dan percobaannya penelitiaan dibatasi pada kajian distribusi dan profil kelembaban tanah. Kandungan air tanah dinyatakan sebagai kelembaban tanah dalam bentuk hisapan (h). Model simulasi gerakan air dalam dinding kendi dan tanah dianalisis dengan pendekatan sistem koordinat silender dan simetris putar. Metode numerik elemen hingga digunakan untuk solusi dari model simulasi yang tujuannya untuk mendapatkan distribusi kelembaban tanah dan profilnya untuk menentukan zone penanamn tanaman.
Osmosis adalah peristiwa perpindahan molekul-molekul zat dari larutan berkonsentrasi rendah ke larutan berkonsentrasi tinggi melalui suatu membran semipermeabel tanpa menggunakan energi (transpor pasif). Sedangkan Difusi adalah peristiwa perpindahan molekul-molekul suatu zat dari larutan berkonsentrasi tinggi ke larutan berkonsentrasi rendah tanpa menggunakan energi (transport pasif).
2.2 Sistem Kontrol
2.2.1 Pengertian Sistem Kontrol
Sistem kendali atau sistem kontrol (control sistem) adalah suatu alat (kumpulan alat) untuk mengendalikan, memerintah, dan mengatur keadaan dari suatu sistem. Dalam industri,sistem kontrol merupakan sebuah sistem yang meliputi pengontrolan variabel-variabel seperti temperatur (temperature), tekanan (pressure), aliran (flow), level, dan kecepatan (speed). Untuk mengimplentasikan teknik sistem kontrol (Sistem Control Engineering) dalam industri diperlukan banyak keahlian atau keilmuan seperti dibidang: teknologi mekanik (mechanical engineering), teknik elektrik (electrical engineering), elektronik (electronics) dan sistem pneumatik (pneumaticsistems). Ada dua konsep dasar dalam sistem kontrol yang dikenal yaitu sistem kontrol lup terbuka (open-loop control system) atau umpan-maju (feedforward) dan sistem kontrol lup tertutup (closed-loop control system) atau umpan-balik (feedback) (Hordeski, 1994).
1. Sistem kontrol secara manual
Sistem kontrol secara manual, proses pengaturannya dilakukan secara manual oleh