PENDUGAAN TINGKAT SERANGAN
ULAT Plutella xylostella DAN Crocidolomia pavonana
PADA PERTANAMAN KUBIS BERDASARKAN CITRA
ISMI AMALIA
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
PERNYATAAN MENGENAI TESIS DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
*Dengan ini saya menyatakan bahwa tesis berjudul Pendugaan Tingkat Serangan Ulat Plutella xylostella dan Crocidolomia pavonana pada Pertanaman Kubis Berdasarkan Citra adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir tesis ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, September 2013
Ismi Amalia
NIM G651110091
*Pelimpahan hak cipta atas karya tulis dari penelitian kerjasama dengan pihak
ISMI AMALIA. Pendugaan Tingkat Serangan Ulat Plutella xylostella dan
Crocidolomia pavonana pada Pertanaman Kubis Berdasarkan Citra. Dibimbing oleh YENI HERDIYENI dan AUNU RAUF.
Ngengat punggung berlian, Plutella xylostella (L.) (Lepidoptera:
Plutellidae), dan ulat krop kubis, Crocidolomia pavonana (F.) (Lepidoptera:
Pyralidae), adalah dua serangga hama yang paling penting pada pertanaman kubis di Indonesia. Penelitian ini dilakukan dengan tujuan menduga tingkat serangan hama berdasarkan citra digital. Tingkat serangan diklasifikasikan ke dalam lima kategori yaitu sehat/sangat ringan, ringan, sedang, berat dan sangat berat.
Data yang digunakan dalam penelitian ini adalah citra kubis yang sehat dan yang diserang oleh Plutella xylostella dan/atau Crocidolomia pavonana. Citra kubis mempunyai krop dan tidak mempunyai krop yang digunakan masing-masing adalah 476 dan 24 citra. Citra-citra tersebut dibagi dibagi ke dalam dua bagian: data latih dan dala uji dengan persentase masing-masing adalah 80% dan 20%. Five-fold cross validation digunakan untuk menemukan model terbaik untuk
classifier.
Pendugaan tingkat serangan pada awalnya dilakukan pada individu tanaman. Kubis yang mempunyai krop dan tidak mempunyai krop diklasifikasikan dengan probabilistic neural network (PNN) berdasarkan empat fitur Haralick, yaitu: contrast, correlation, dissimilarity, and homogeneity. Gray level co-occurrence matrix (GLCM) digunakan untuk mengekstraksi fitur-fitur tekstur. Hasil penelitian menunjukkan bahwa akurasi rata-rata dari PNN sebagai
classifier dalam mengklasifikasikan kubis yang mempunyai krop dan tidak mempunyai krop adalah 92.4%.
Kubis yang mempunyai krop disegmentasi, setelah itu dideteksi area kropnya dengan randomized hough transform (RHT). Hasil deteksi krop dikelompokkan ke dalam tiga kategori, yaitu: baik, cukup baik dan tidak baik. Hasil penelitian menunjukkan bahwa penentuan area krop dengan RHT mempunyai akurasi sebesar 89.13%. Area krop yang diperoleh selanjutnya dilakukan perbaikan citra, dengan menerapkan penghapusan bayangan dan penghalusan. Tingkat kerusakan ditentukan oleh proporsi lubang di area krop dengan menerapkan operasi erosi dan thresholding dengan Otsu. Akurasi pendugaan tingkat kerusakan untuk kubis mempunyai krop adalah 76.1%. Pendugaan tingkat kerusakan untuk kubis yang mempunyai krop dan tidak mempunyai krop diakumulasi dan memiliki akurasi 75%. Setelah diperoleh tingkat kerusakan untuk setiap tanaman, tahap akhir dari penelitian ini adalah menduga tingkat serangan ulat di area pertanaman kubis. Kesalahan yang timbul dari pendugaan ini adalah 3%. Hasil penelitian ini dapat digunakan oleh pengamat hama atau penyuluh pertanian dalam membuat keputusan pengendalian hama. Kata kunci: Crocidolomia pavonana, gray level co-occurrence matrix, Plutella
SUMMARY
ISMI AMALIA. Estimation of Infestation Level of Diamondback Moth and Cabbage Cluster Caterpillar Based on Images. Supervised by YENI HERDIYENI and AUNU RAUF.
Diamondback moth, Plutella xylostella (L.) (Lepidoptera: Plutellidae), and cabbage cluster caterpillar, Crocidolomia pavonana (F.) (Lepidoptera: Pyralidae), are the two most important insect pests of cabbage in Indonesia. Research was conducted with the objectives to assess level of infestsation of the pests based on digital images. Infestation levels were classified into five categories: healthy/negligible, low, moderate, severe and very severe.
The data used in this research were images of cabbage that were healthy and attacked by Plutella xylostella and/or Crocidolomia pavonana. Images of cabbages with crop and without crop were 476 and 24 images respectively. The images were divided in two sets: training set and test set with percentage are 80% and 20% respectively. Ten-fold cross-validation was used to find the best model for classifier.
Estimation of infestation level initially was made on individual plants. Cabbages with crop and without crop were classified with probabilistic neural network (PNN) based on four Haralick features, namely: contrast, correlation, dissimilarity, and homogeneity. Gray level co-occurrence matrix (GLCM) was used to extract texture features. The research showed that the average accuracy from PNN as a classifier for classifying cabbage with crop and without crop smoothing. The level of damage was estimated based one proportion of holes on the crop area by applying erosion operations and thresholding with Otsu. could be used by pest observers or extension agents in making pest management decisions.
© Hak Cipta Milik IPB, Tahun 2013
Hak Cipta Dilindungi Undang-Undang
Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumbernya. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik, atau tinjauan suatu masalah; dan pengutipan tersebut tidak merugikan kepentingan IPB
Tesis
sebagai salah satu syarat untuk memperoleh gelar Magister Komputer
pada
Program Studi Ilmu Komputer
PENDUGAAN TINGKAT SERANGAN
ULAT Plutella xylostella DAN Crocidolomia pavonana
PADA PERTANAMAN KUBIS BERDASARKAN CITRA
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
BOGOR 2013
Judul Tesis : Pendugaan Tingkat Serangan Ulat Plutella xylostella dan
Crocidolomia pavonana pada Pertanaman Kubis Berdasarkan Citra
Nama : Ismi Amalia
NIM : G651110091
Disetujui oleh Komisi Pembimbing
Dr Yeni Herdiyeni, SSi MKom Ketua
Prof Dr Ir Aunu Rauf, MSc Anggota
Diketahui oleh
Ketua Program Studi Ilmu Komputer
Dr Yani Nurhadryani, SSi MT
Dekan Sekolah Pascasarjana
Dr Ir Dahrul Syah, MScAgr
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah SWT atas segala karunia-Nya sehingga karya ilmiah ini berhasil diselesaikan. Tema yang dipilih dalam penelitian yang dilaksanakan sejak bulan September 2012 sampai Agustus 2013 ini ialah pengolahan citra, dengan judul Pendugaan Tingkat Serangan Ulat
Plutella xylostella dan Crocidolomia pavonana pada Pertanaman Kubis Berdasarkan Citra.
Bantuan dari berbagai pihak penulis terima selama proses penelitian ini. Penulis menyampaikan ucapan terima kasih yang tulus serta penghargaan setinggi-tingginya kepada:
1. Ibu Dr Yeni Herdiyeni, SSi MKom dan Bapak Prof Dr Ir Aunu Rauf, MSc selaku komisi pembimbing yang telah meluangkan waktu, pikiran serta keikhlasan dalam membimbing dan memberikan arahan sehingga penelitian ini dapat diselesaikan.
2. Bapak Dr Ir Agus Buono, MSi MKom selaku Ketua Departemen Ilmu Komputer dan Penguji Luar Komisi pada ujian tesis atas saran dan masukan yang diberikan untuk kesempurnaan penelitian ini.
3. Ibu Dr Yani Nurhadryani, SSi MT dan Bapak Toto Haryanto, MKom selaku Ketua dan Sekretaris Program Pascasarjana Departemen Ilmu Komputer atas bantuan yang diberikan selama penulis menempuh pendidikan.
4. Direktorat Jenderal Pendidikan Tinggi Kementerian Pendidikan dan Kebudayaan atas beasiswa Bantuan Program Pasca Sarjana (BPPS).
5. Bapak Ir H Ridwan, MT selaku Direktur Politeknik Negeri Lhokseumawe yang telah memberikan izin untuk melanjutkan studi ke program pascasarjana.
6. Teman-teman Laboratorium Riset Computer Vision, lima sekawan dan seluruh rekan kuliah di Departemen Ilmu Komputer atas bantuan, dukungan dan kebersamaan untuk menyelesaikan penelitian ini dengan sebaik-baiknya. 7. Ayahanda Drs H Armia Ibrahim, SH, Ibunda Iriawati Yunus (almarhumah)
dan Bunda Yuslita Yunus atas doa dan dukungan yang diberikan.
8. Semua pihak yang telah membantu sehingga penelitian ini dapat diselesaikan. Semoga karya ilmiah ini bermanfaat.
Bogor, September 2013
DAFTAR TABEL ix
Kubis (Brassica oleracea var capitata) 3
Hama pada Kubis 3
Citra Digital 4
Segmentasi 5
Ekstraksi Fitur (Feature Extraction) 6
Klasifikasi 8
Ekstraksi Fitur Tekstur dengan GLCM 18
Pembagian Data Latih dan Uji 18
Klasifikasi dengan Probabilistic Neural Network 19
Penentuan Tingkat Kerusakan Krop 19
Evaluasi 24
Pendugaan Tingkat Serangan Ulat pada Pertanaman Kubis 24
Perangkat Keras dan Perangkat Lunak 25
4 HASIL DAN PEMBAHASAN 26
Praproses Citra Kubis 26
Ekstraksi Fitur Tekstur Citra Kubis dengan GLCM 26 Klasifikasi Citra Kubis dengan Probabilistic Neural Network 30 Penentuan Tingkat Kerusakan Krop pada Kubis yang Mempunyai Krop 37
Analisis Penentuan Tingkat Kerusakan Krop 54
Evaluasi Penentuan Tingkat Kerusakan Krop 56
Evaluasi Penentuan Tingkat Kerusakan Kubis per Individu Tanaman 56 Pendugaan Tingkat Serangan Ulat pada Area Pertanaman Kubis 57 Antarmuka Sistem Pendugaan Tingkat Serangan Ulat 58
5 SIMPULAN DAN SARAN 64
Simpulan 64
DAFTAR TABEL
1 Confusion matrix untuk masalah klasifikasi biner 14 2 Citra kubis berdasarkan ada atau tidak adanya krop 17
3 Citra kubis yang mempunyai krop 18
4 Skenario percobaan yang dilakukan 19
5 Proporsi tingkat kerusakan krop pada kubis yang mempunyai krop 24
6 Bobot tingkat kerusakan krop 24
7 Kategori tingkat serangan ulat 25
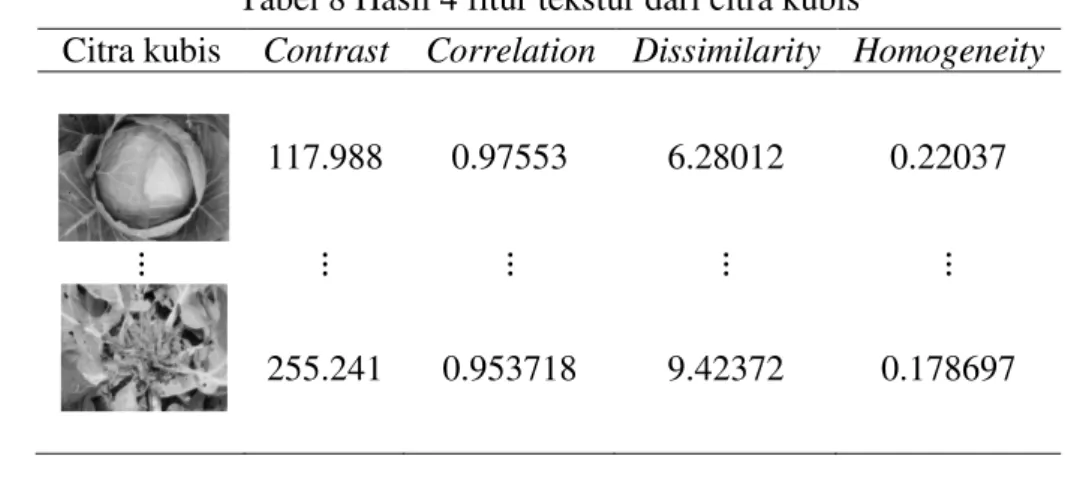
8 Hasil 4 fitur tekstur dari citra kubis 27
9 Akurasi hasil klasifikasi dari 100 data uji dengan PNN 30 10 Confusion matrix hasil PNN pada fold 4 31 11 Nilai fitur citra kubis punya krop yang salah diklasifikasikan 31 12 Nilai fitur citra kubis tanpa krop yang salah diklasifikasikan 34
13 Hasil segmentasi krop kubis 38
1 Gejala serangan P. xylostella pada kubis 3
2 Gejala serangan C. pavonana pada kubis 4
3 Struktur PNN 9
4 Skema penentuan tanaman contoh yang diamati 15
5 Skema sistem yang dibangun 15
6 Prosedur penentuan tingkat kerusakan krop 16
7 Contoh citra yang digunakan berdasarkan kategorinya 17 8 Bagan penentuan tingkat kerusakan kubis yang mempunyai krop 20
9 Proses deteksi krop 22
10 Penghapusan bayangan, daun luar dan celah daun 23
11 Alur deteksi lubang 23
12 Hasil praproses citra kubis 26
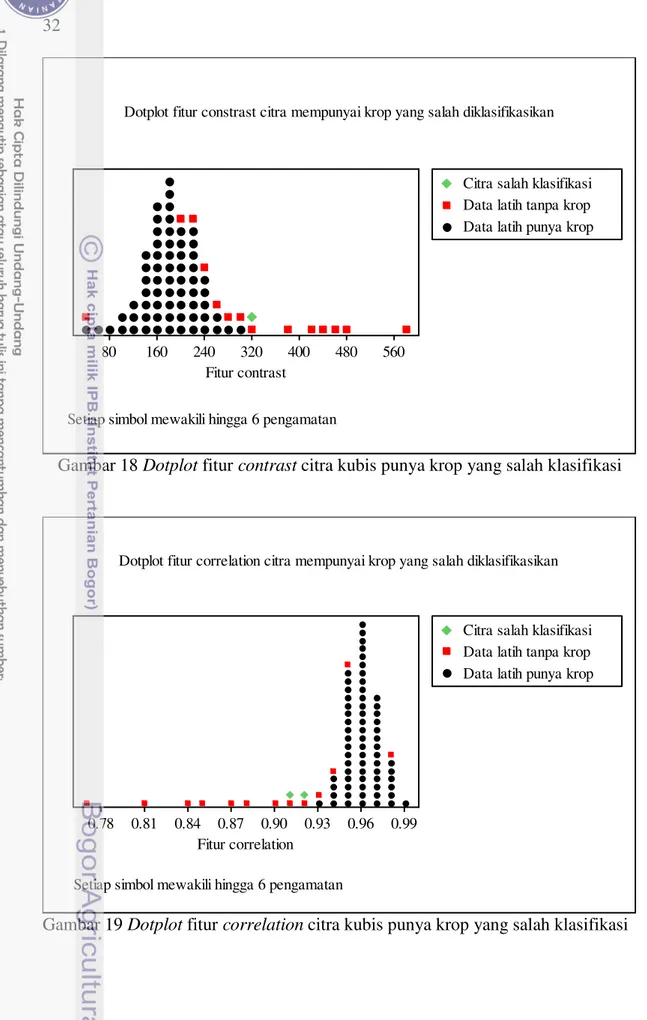
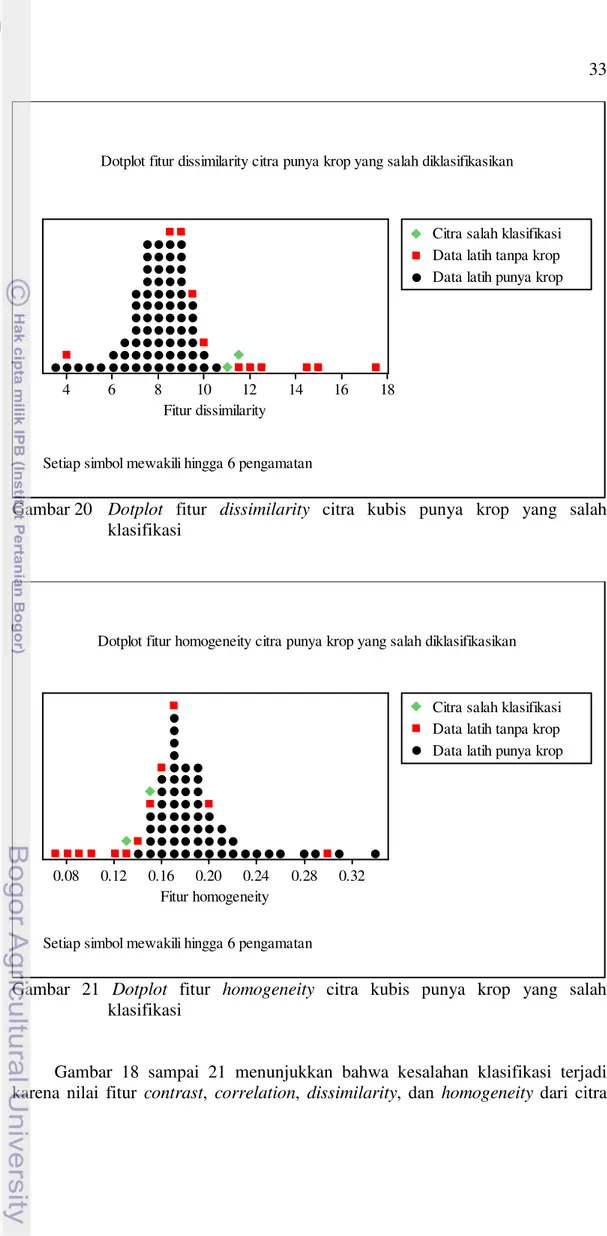
13 Histogram fitur contrast citra kubis punya krop dan tanpa krop 27 14 Histogram fitur correlation citra kubis punya krop dan tanpa krop 28 15 Histogram fitur dissimilarity citra kubis punya krop dan tanpa krop 28 16 Histogram fitur homogeneity citra kubis punya krop dan tanpa krop 29 17 Kubis mempunyai krop diklasifikasikan sebagai kubis tanpa krop 31 18 Dotplot fitur contrast citra kubis punya krop yang salah klasifikasi 32 19 Dotplot fitur correlation citra kubis punya krop yang salah klasifikasi 32 20 Dotplot fitur dissimilarity citra kubis punya krop yang salah klasifikasi 33 21 Dotplot fitur homogeneity citra kubis punya krop yang salah klasifikasi 33 22 Kubis tanpa krop diklasifikasikan sebagai kubis punya krop 34 23 Dotplot fitur contrast citra kubis tanpa krop yang salah klasifikasi 35 24 Dotplot fitur correlation citra kubis tanpa krop yang salah klasifikasi 35 25 Dotplot fitur dissimilarity citra kubis tanpa krop yang salah klasifikasi 36 26 Dotplot fitur homogeneity citra kubis tanpa krop yang salah klasifikasi 36 27 Kubis tidak mempunyai krop yang diklasifikasikan dengan benar 37 28 Intensitas warna RGB pada sebuah piksel dari citra kubis 37 29 Perbedaan hasil segmentasi citra kubis sebelum dan sesudah dilasi 38 30 Hasil segmentasi yang tidak baik dengan threshold 36.029 40 31 Hasil segmentasi yang tidak baik dengan threshold 20.7337 41
32 Cara penentuan pusat ellipse 41
33 Keseluruhan ellipse yang terdeteksi dalam citra 43 34 Ellipse yang ditemukan pada citra kubis dengan skor 853 43
35 Hasil mask template 43
36 Hasil pendeteksian krop pada citra kubis 44
37 Ellipse yang terdeteksi pada citra (100 ellipse, skor tertinggi 348) 45 38 Ellipse yang terdeteksi pada citra (13 ellipse, skor tertinggi 889) 45 39 Ellipse yang terdeteksi pada citra (5 ellipse, skor tertinggi 1652) 45 40 Hasil pendeteksian krop dengan kategori tidak baik 47 41 Bayangan, daun luar dan celah antara daun luar dengan bagian krop 47 42 Histogram channel H salah satu citra kubis 48 43 Hasil penghapusan bayangan, daun luar dan celah krop 49
44 Perbandingan hasil penghapusan bayangan 49
46 Hasil operasi erosi citra kubis 51
47 Hasil pendeteksian lubang 51
48 Daun luar dan celah dideteksi sebagai lubang akibat kerusakan krop 51
49 Hasil deteksi lubang yang baik 52
50 Perhitungan luas area krop rusak 53
51 Sangat ringan/sehat diklasifikasi sebagai ringan 54
52 Ringan diklasifikasi sebagai sedang 55
53 Sedang diklasifikasi sebagai ringan 55
54 Berat diklasifikasi sebagai sedang 55
55 Ilustrasi banyaknya tanaman contoh yang diamati 57
56 Antarmuka menu Home 59
57 Antarmuka menu Tingkat Serangan 59
58 Antarmuka hasil pendugaan tingkat serangan ulat 60 59 Informasi hasil pendugaan tingkat serangan ulat 60
60 Hasil pengolahan citra kubis mempunyai krop 61
61 Hasil pembesaran citra pada penentuan area krop 61 62 Hasil pengolahan citra kubis tidak mempunyai krop 62
63 Antarmuka menu Contact 62
64 Antarmuka menu Help 63
1
PENDAHULUAN
Latar Belakang
Kendala utama peningkatan produksi kubis adalah rentan terhadap serangan hama. Hama utama pada kubis adalah ulat Plutella xylostella dan Crocidolomia pavonana (Grzywacz et al. 2010). Pengendalian hama dengan cara yang ramah lingkungan diantaranya adalah mengurangi penggunaan pestisida. Strategi ini dikenal dengan pengendalian hama terpadu (PHT) atau integrated pest management (IPM) (Bhandari 2012). Rekomendasi penggunaan pestisida dalam PHT didasarkan pada monitoring untuk menduga tingkat serangan hama (Sandler 2010). Pihak yang sangat berperan dalam penerapan sistem PHT adalah pejabat fungsional pengendali organisme penganggu tanaman (POPT). Petugas POPT melakukan kegiatan penghitungan dan pengumpulan informasi tingkat serangan organisme pengganggu tanaman (OPT) (Deptan 2007). Dalam pengumpulan informasi tersebut, pengamatan tingkat serangan OPT dilakukan secara periodik, satu sampai dua kali per minggu pada daerah-daerah yang dicurigai terserang OPT (Warduna et al. 2011). Kendala yang dihadapi di lapangan adalah jumlah petugas POPT belum mencapai kondisi ideal, yaitu satu orang di setiap kecamatan. Optimalnya kinerja POPT dalam melaksanakan tugasnya sangat dipengaruhi oleh rasio jumlah petugas POPT dengan luas wilayah kerja pengamatan (Deptan DJTP 2010). Jumlah petugas POPT pada tahun 2010 adalah 3 183 orang, tersebar di 6 543 kecamatan (Deptan DJTP 2011). Kendala lainnya yang dihadapi oleh petugas POPT adalah dalam perhitungan tingkat serangan OPT. Perhitungan matematis untuk pendugaan tingkat serangan OPT tidak sederhana karena tanaman yang diamati perlu diboboti sesuai dengan kategori tingkat serangannya. Pendugaan tingkat serangan ulat P. xylostella dan/atau C. pavonana pada pertanaman kubis merupakan hasil kuantisasi pendugaan tingkat serangan ulat per individu tanaman (Warduna et al. 2011).
Pendugaan tingkat serangan ulat per individu tanaman secara manual untuk area pertanaman kubis yang luas membutuhkan waktu lama. Pemanfaatan citra
digital dalam bidang pertanian telah banyak diterapkan. Nazaré et al. (2010) menggunakan citra digital untuk penentuan area yang rusak pada daun akibat serangan hama, yaitu pada daun kedelai. Vibhute dan Bodhe (2012) telah membuktikan bahwa penerapan pengolahan citra sangat efektif untuk analisis di sektor pertanian, seperti teknik pencitraan, pendeteksian gulma dan penyortiran buah. Hasil analisisnya akurat dan membutuhkan sedikit waktu dibandingkan dengan metode tradisional. Rainville et al. (2012) juga berhasil mengevaluasi tingkat serangan gulma pada ladang jagung dan kedelai menggunakan citra
Menurut Abirami et al. (2012), metode analisis tekstur yang mempertimbangkan hubungan spasial piksel adalah gray level co-occurrence matrix (GLCM). Klasifikasi berdasarkan hasil analisis tekstur GLCM pernah dilakukan oleh Wu dan Wen (2009) dalam mengidentifikasi gulma di ladang jagung pada tahap awal pertumbuhan jagung. GLCM dan nilai statistik histogram dari citra grayscale
digunakan untuk mendapatkan fitur tekstur gulma dan bibit jagung. Fitur-fitur tekstur ini digunakan dalam klasifikasi.
Penelitian ini mengembangkan suatu sistem pendugaan tingkat serangan ulat P. xylostella dan/atau C. pavonana pada pertanaman kubis dengan memanfaatkan citra digital. Sistem yang dikembangkan berbasis web.
Probabilistic neural network (PNN) digunakan untuk mengklasifikasikan kubis yang mempunyai krop dan tidak mempunyai krop berdasarkan hasil ekstraksi tekstur GLCM. Penentuan tingkat serangan ulat pada kubis yang mempunyai krop berdasarkan tingkat kerusakan krop adalah keterbaruan dalam penelitian ini. Kerusakan ditentukan berdasarkan kepadatan area yang rusak pada krop akibat dikonsumsi oleh ulat. Penentuan tingkat serangan ulat pada area pertanaman kubis adalah berdasarkan hasil perhitungan rata-rata bobot tingkat kerusakan krop per individu tanaman yang diamati. Sistem ini diharapkan dapat membantu petugas POPT dalam menjalankan tugasnya di lapangan. Sehingga perhitungan dan pengumpulan informasi tingkat serangan ulat dapat lebih mudah dilakukan.
Tujuan Penelitian
Penelitian ini bertujuan menduga tingkat serangan ulat P. xylostella dan/atau
C. pavonana pada pertanaman kubis dengan memanfaatkan citra digital. Pengklasifikasian tingkat kerusakan krop menggunakan probabilistic neural network (PNN) dan berdasarkan kepadatan area yang rusak pada krop kubis.
Manfaat Penelitian
Penelitian ini bermanfaat untuk mengetahui tingkat serangan ulat
P. xylostella dan/atau C. pavonana pada pertanaman kubis. Hal ini diharapkan dapat membantu petugas POPT dalam melakukan perhitungan dan pengumpulan informasi tingkat serangan OPT. Informasi tingkat serangan OPT dapat digunakan untuk pengambilan keputusan dalam melakukan tindakan pengendalian. Selain itu dapat digunakan untuk mempredikasi kehilangan hasil atau hasil panen.
Ruang Lingkup Penelitian
2
TINJAUAN PUSTAKA
Kubis (Brassica oleracea var capitata)
Kubis (Brassica oleracea var capitata) termasuk dalam famili
Brassicaceae. Kubis berasal dari Eropa Barat, dapat tumbuh baik pada daerah beriklim tropis dan sub tropis. Kualitas kubis terbaik biasanya diperoleh dengan suhu siang hari berkisar 15 °C sampai 25 °C, seperti di dataran tinggi tropis (FAO 2000).
Hama pada Kubis
P. xylostella dan/atau C. pavonana adalah dua hama utama yang sering menyebabkan kerusakan berat pada tanaman kubis (Grzywacz et al. 2010). Varietas kubis yang tahan terhadap hama hingga saat ini belum ada. Oleh karena itu perlu dilakukan kegiatan pencegahan terhadap hama (FAO 2000).
Plutella xylostella
P. xylostella termasuk dalam ordo Lepidoptera dan famili Plutellidae, dikenal dengan nama diamondback moth atau ngengat punggung berlian (Kalshoven 1981). P. xylostella merusak sebagian besar daun tanaman kubis. Serangan parah oleh ulat P. xylostella terutama terjadi ketika ulat menyerang tanaman pada saat berupa bibit. Kerusakan awal berupa lubang-lubang kecil yang disebabkan oleh larva muda. Kerusakan dengan lubang-lubang yang lebih besar disebabkan oleh larva dewasa. Seluruh bagian tanaman bisa dipenuhi dengan lubang-lubang untuk populasi ulat yang padat. Pada serangan berat, daun hanya menyisakan kerangkanya yaitu urat-urat daun. Larva juga memakan kubis yang sedang berkembang, menyebabkan bentuk krop berubah dan mendorong pembusukan. Kerusakan tunas utama pada bibit dapat mengakibatkan tanaman tidak mempunyai krop atau tanaman dengan krop yang berukuran terlalu kecil. Kerusakan tanaman secara dini dapat mengurangi area daun sebagai tempat fotosintesis dan hal ini bisa menurunkan hasil panen. Kerusakan akhir mungkin memiliki pengaruh yang kecil terhadap hasil dan kualitas dengan turunnya nilai tanaman karena mengalami kerusakan pada daun pembungkusnya. Kerusakan parah dapat terjadi terutama saat cuaca panas dan kering (FAO 2000). Gejala serangan P. xylostella ditunjukkan pada Gambar 1.
Penanaman kubis lebih baik dilakukan di musim hujan saat populasi
P. xylostella terhalang oleh hujan. Tumpangsari dengan tomat (atau tanaman lain yang tidak rentan terhadap P. xylostella) dapat juga membantu mengurangi populasi P. xylostella. Hal ini disebabkan karena P. xylostella dewasa akan lebih sulit dalam menemukan tanaman kubis di antara tanaman lainnya (FAO 2000). Crocidolomia pavonana
C. pavonana atau yang dikenal dengan sebutan ulat krop kubis (cabbage head caterpillar) termasuk dalam ordo Lepidoptera dan famili Pyralidae.
C. pavonana merupakan hama yang sering menjadi masalah serius pada tanaman famili Brassicaceae dengan persebaran meliputi Afrika Selatan, Asia Tenggara, Australia, dan Kepulauan Pasifik. Di pulau Jawa hama ini ditemukan di dataran rendah maupun dataran tinggi. Perilaku ulat C. pavonana adalah makan bersama-sama pada satu tanaman. Larva muda hidup secara bergerombol pada bagian bawah daun kubis untuk menghindari cahaya. Selama 4 atau 5 hari pertama sejak menetas, larva kecil memakan bagian bawah daun tanpa memakan lapisan atas daun, sehingga membuat kerusakan berupa jendela epidermis sampai daun berlubang. Selanjutnya ulat pindah ke titik tumbuh tanaman. Kerusakan oleh ulat
C. pavonana menyebabkan tanaman hancur total atau mempunyai krop yang kecil. Larva sangat aktif dan dapat melakukan perjalanan dua meter atau lebih untuk menjangkau tanaman inang yang lebih disukainya (Kalshoven 1981; FAO 2000). Gejala serangan C. pavonana ditunjukkan pada Gambar 2.
Gambar 2 Gejala serangan C. pavonana pada kubis
Citra Digital
Citra digital mengacu pada fungsi intensitas cahaya dua dimensi ( , ), dan menyatakan koordinat spasial. Nilai pada setiap titik ( , ) sebanding dengan kecerahan (gray level) dari citra di titik tersebut. Citra digital dapat dianggap sebagai matriks dengan indeks baris dan kolom yang mengidentifikasi titik pada citra. Nilai elemen matriks yang sesuai mengidentifikasi gray level pada titik tersebut (Ravikumar dan Shanmugam 2012). Persamaan 1 digunakan untuk mengkonversi nilai RGB (Red-Green-Blue) sebuah piksel ke nilai grayscale
(Singh et al. 2010).
Segmentasi
Segmentasi adalah langkah paling penting dalam analisis citra karena kinerjanya secara langsung mempengaruhi kinerja langkah-langkah pengolahan selanjutnya. Segmentasi berperan dalam mengekstrak informasi citra untuk menciptakan daerah homogen dengan mengelompokkan piksel ke dalam kelompok-kelompok sehingga membentuk daerah yang memiliki kesamaan. Daerah homogen yang terbentuk memiliki kesamaan sesuai dengan kriteria seleksi tertentu misalnya intensitas, warna, dan lain-lain (Kaur et al. 2011).
Metode Thresholding
Thresholding bertujuan mengenali dan mengekstrak target dari background
berdasarkan pada distribusi gray level atau tekstur pada objek citra. Teknik ini berfungsi untuk segmentasi citra (Nagesh et al. 2010). Teknik thresholding
mengevaluasi setiap piksel citra untuk menentukan apakah piksel tersebut termasuk objek atau tidak sehingga menghasilkan citra biner (Kaur et al. 2011). Proses ini bekerja dengan memberikan nilai 1 untuk semua piksel yang termasuk dalam interval threshold dan nilai 0 untuk piksel lainnya. Thresholding
mengkonversi citra grayscale dengan nilai piksel berkisar dari 0 sampai 255 ke citra biner dengan nilai-nilai piksel 0 atau 1. Thresholding memungkinkan untuk memilih nilai interval piksel pada citra grayscale dan berwarna untuk memisahkan objek dari background (Bhardwaj 2012). Nilai threshold ( ) pada pendekatan thresholding dipilih untuk memisahkan foreground objek dari
background pada keseluruhan citra atau Region of Interest (ROI) dalam citra ( , ) sesuai dengan Persamaan 2.
( , ) = 1, ( , ) ≥0, ( , ) < (2)
dengan adalah intensitas citra dan ( , ) adalah koordinat spasial (Zaidi et al.
2010). Thresholding dalam penelitian ini digunakan pada tahap segmentasi krop, penghapusan bayangan dan pendeteksian lubang pada krop.
Otsu Threshold
Algoritme Otsu bekerja dengan asumsi bahwa citra input untuk thresholding
terdiri atas 2 kelas piksel yaitu foreground dan background. Threshold optimum dihitung dengan memisahkan 2 kelas sehingga meminimumkan intra-class variance, disebut weighted sum of variances dari 2 kelas. Weighted sum of variances dari dua kelas didefinisikan pada Persamaan 3.
( ) = ( ) ( ) + ( ) ( ) (3)
Bobot merepresentasikan probabilitas dari dua kelas yang dipisahkan oleh threshold dan varians dari kelas-kelas . Otsu menggambarkan bahwa upaya meminimalisasi intra-class variance adalah sama dengan memaksimalkan
( ) = − ( ) = ( ) ( ) ( ) − ( ) (4) Ide ini menghasilkan suatu algoritme yang efektif. Algoritme Otsu adalah sebagai berikut (Nagesh et al. 2010):
1. Hitung histogram dan probabilitas setiap level intensitas. 2. Inisialisasi (0) dan (0).
3. Iterasi dimulai dari threshold = 1 sampai intensitas maksimum. a. Update dan .
b. Hitung ( ).
4. Threshold yang dikehendaki sesuai dengan nilai maksimum ( ).
Ekstraksi Fitur (Feature Extraction) mengurangi kompleksitas komputasi dan ruang dimensi. Ekstraksi fitur paling penting dalam sistem pengenalan citra karena fitur yang disediakan berpengaruh terhadap efisiensi klasifikasi (Patil et al. 2012).
Fitur Tekstur
Tekstur adalah seluruh permukaan yang menggambarkan pola visual. Tekstur menyediakan informasi tentang susunan struktural dari permukaan atau menggambarkan susunan fisik permukaan (Patil et al. 2012). Tekstur dikaitkan dengan distribusi spasial gray tones (Haralick et al. 1973). Metode statistika untuk tekstur yang memperhitungkan hubungan spasial piksel adalah gray level co-occurrence matrix (GLCM)(Abirami et al. 2012).
Gray Level Co-occurrence Matrix (GLCM)
Gray level co-occurrence matrix (GLCM) atau gray level dependency matrix pertama kali diperkenalkan oleh Haralick untuk mengekstrak fitur tekstur (Sulochana dan Vidhya 2013). GLCM adalah conditional joint probabilities dari dua pasangan gray level yang ada (Caihuan 2009). Distribusi piksel gray level
dapat dideskripsikan dengan probabilitas dari dua piksel yang memiliki gray level
tertentu pada hubungan spasial tertentu. Informasi ini dapat diringkas dalam GLCM dua dimensi yang dapat dihitung untuk berbagai jarak dan orientasi (Hazra 2011).
Selain itu, terdapat parameter kuantisasi gray level. Semakin kecil jumlah level
kuantisasi, semakin banyak informasi yang hilang (Caihuan 2009).
Misalkan citra yang dianalisis adalah persegi panjang, memiliki $% kolom
dan $& baris. Gray level muncul di setiap piksel yang dikuantisasi untuk $' level.
(%= )1,2, ⋯ , $%, adalah kolom, (& = -1,2, ⋯ , $&. adalah baris, dan
% = -0,1, ⋯ , $'− 1. adalah himpunan dari gray level yang dikuantisasi $'.
Himpunan (&× (% adalah himpunan piksel dari citra yang diurutkan berdasarkan baris-kolom (Soh dan Tsatsoulis 1999).
Citra dapat direpresentasikan sebagai fungsi yang memberikan beberapa
gray level dalam (jumlah gray level yang terkuantisasi) untuk setiap piksel atau pasangan koordinat dalam (&× (%; : (&× (% → . Informasi texture-context
ditentukan oleh matriks frekuensi relatif 3,4 dengan dua piksel tetangga dipisahkan oleh jarak " pada citra, satu dengan gray level dan yang lainnya dengan gray level . Matriks frekuensi gray level co-occurrence yang demikian adalah fungsi dari hubungan orientasi/arah dan jarak antara piksel-piksel yang bertetangga (Soh dan Tsatsoulis 1999).
Misalkan 5( , ) merupakan masukan ke ( , ) dalam GLCM yang dinormalisasi. Parameter %, &, % dan & menunjukkan nilai rata-rata dan standar deviasi baris dan kolom dari GLCM (Bento et al. 2009). Rata-rata dan standar deviasi untuk baris dan kolom dari matriks GLCM didefinisikan seperti pada Persamaan 5 sampai 8 (Soh dan Tsatsoulis 1999).
% = ∑ ∑ ∙ 5( , )4 (5)
& = ∑ ∑ ∙ 5( , )4 (6)
% = ∑ ∑ ( −4 %) ∙ 5( , ) (7)
& = ∑ ∑ 8 −4 &9 ∙ 5( , ) (8)
3. Homogeneity
:M = ∑ ∑4 N( C4)O5( , ) (11)
4. Dissimilarity
:P = ∑ ∑ | − | ∙ 5( , )4 (12)
Contrast digunakan untuk mengukur perbedaan intensitas gray level antara sebuah piksel dan piksel tetangganya dalam keseluruhan citra. Nilai contrast
rendah pada citra yang seragam, yaitu jika gray level dari setiap pasangan piksel mirip. Untuk citra dengan variasi yang lebih besar menghasilkan nilai contrast
tinggi. Dissimilarity mirip dengan contrast. Nilainya menjadi tinggi ketika local region memiliki contrast yang tinggi. Fitur dissimilarity sensitif terhadap keragaman spasial gray level dan pola dari citra. Sementara itu, correlation
merepresentasikan bagaimana keterkaitan sebuah piksel dengan tetangganya dalam keseluruhan citra, sedangkan homogeneity menunjukkan kemiripan antara nilai-nilai gray level dari piksel citra. Homogeneity diharapkan menjadi besar jika
gray level dari setiap pasangan piksel mirip. Hal ini terjadi ketika citra homogen
secara lokal (Abouelatta 2013; Bento et al. 2009).
Klasifikasi
Klasifikasi adalah prosedur untuk mengklasifikasikan pola input ke dalam kelas yang serupa. Pemilihan classifier yang sesuai memerlukan pertimbangan banyak faktor, yaitu akurasi klasifikasi, kinerja algoritme dan komputasi (Qurat-ul-ain et al. 2010).
Probabilistic Neural Network (PNN)
Probabilistic neural network (PNN) dikembangkan oleh Donald Specht. Struktur PNN memberikan solusi umum untuk masalah klasifikasi pola dengan pendekatan Bayesian classifiers. PNN menggunakan training set yang supervise
untuk mengembangkan fungsi distribusi pada lapisan pola. Oleh karena itu PNN dapat digunakan untuk masalah klasifikasi (Araghi et al. 2009). Keuntungan utama menggunakan PNN adalah pelatihannya mudah dan cepat. Bobot tidak dilatih melainkan nilai yang ditetapkan. Bobot yang ada tidak pernah berganti-ganti, hanya vektor baru yang dimasukkan ke dalam matriks bobot saat pelatihan, sehingga dapat digunakan secara real time (Wu et al. 2007; Herdiyeni et al.
2013).
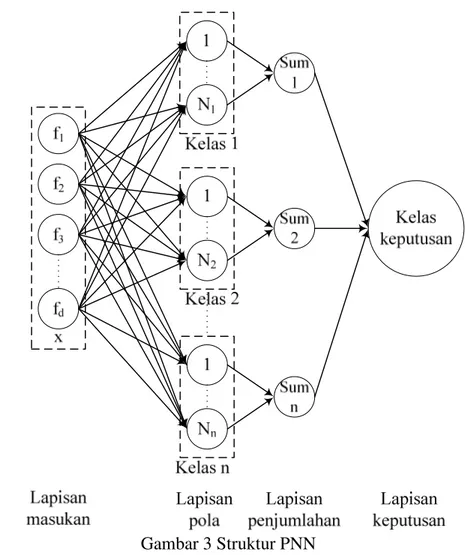
PNN terdiri atas empat lapisan, yaitu lapisan masukan, pola, penjumlahan, dan keputusan/keluaran. Struktur PNN ditunjukkan pada Gambar 3. Lapisan-lapisan penyusun PNN adalah (Wu et al. 2007; Prasvita dan Herdiyeni 2013): 1. Lapisan masukan (input layer)
Gambar 3 Struktur PNN
2. Lapisan pola (pattern layer)
Pada lapisan pola dilakukan perkalian titik (dot product) antara input dan vektor bobot Q , yaitu RQ = ∙ Q , RQ kemudian dibagi dengan bias ( ) tertentu dan selanjutnya dimasukkan ke dalam fungsi Parzen, yaitu
S( ) = exp (− ). Persamaan 13 digunakan pada lapisan pola.
S( ) = X 5 Y−(%C%ZK)[(%C%ZK)
LO \ (13)
dengan Q menyatakan vektor bobot atau vektor latih kelas ke-] urutan ke- . 3. Lapisan penjumlahan (summation layer)
Pada lapisan penjumlahan, setiap pola dari masing-masing kelas dijumlahkan sehingga menghasilkan population density function untuk setiap kelas. Persamaan 14 digunakan pada lapisan ini.
5Q( ) =
( ^)_OL_=Z∑ X 5 Y−
(%C%ZK)[(%C%ZK)
LO \
=Z
dengan:
4. Lapisan keputusan/keluaran (output layer)
Pada lapisan keputusan, input diklasifikasikan ke kelas ] jika nilai 5Q paling besar dibandingkan dengan kelas lainnya.
Randomized Hough Transform
Hough transform (HT) adalah teknik untuk mendeteksi kurva. HT terdiri atas tiga tahap, yaitu: (1) piksel dalam citra ditransformasikan menjadi parameter kurva, (2) parameter kurva yang valid digabungkan dalam accumulator dengan jumlah kurva dalam bin sama dengan skornya, (3) kurva dengan skor maksimum dipilih dari accumulator untuk merepresentasikan kurva dalam citra (Xu et al. 1990).
HT standar mengalami banyak kesulitan yaitu ketika pemetaan kurva. Ukuran bin accumulator ditentukan oleh windowing dan sampling ruang parameter dengan cara heuristik (Xu et al. 1990). Untuk mendeteksi kurva dalam beragam citra, ukuran window harus besar. Selain itu, untuk mendeteksi kurva dengan akurasi yang tinggi, harus ada resolusi parameter yang tinggi. Kedua hal ini membutuhkan accumulator berukuran besar dan waktu pemrosesan yang lama (Inverso 2006). Xu et al. (1990) mengidentifikasi kemungkinan masalah yang mungkin terjadi jika accumulator tidak didefinisikan dengan baik, yaitu: kegagalan dalam mendeteksi beberapa kurva tertentu, kesulitan dalam menemukan local maxima, akurasi yang rendah, tempat penyimpanan yang besar dan kecepatan yang rendah.
Xu et al. (1990) mengurangi permasalahan ini dengan mengusulkan
randomized hough transform (RHT). RHT secara acak memilih ; piksel dari sebuah citra dan mencocokkannya ke parameter kurva. Jika piksel-piksel tersebut sesuai dengan toleransi tertentu, maka ditambahkan ke accumulator dengan sebuah skor. Setelah sejumlah himpunan piksel tertentu dipilih, kurva dengan skor terbaik dipilih dari accumulator dan parameternya digunakan untuk mewakili kurva dalam citra. Karena hanya sedikit subset piksel acak yang dipilih. Metode RHT mengurangi persyaratan tempat penyimpanan dan waktu komputasi yang dibutuhkan untuk mendeteksi kurva dalam citra. Pada RHT, jika kurva dalam
accumulator mempunyai parameter-parameter ellipse yang serupa dengan kurva yang sedang diuji. Parameter-parameter dari kurva diratakan dan kurva rata-rata baru menggantikan kurva yang ada dalam accumulator.
Penentuan Panjang Sumbu Semimajor dan Semiminor
Penentuan parameter-parameter ellipse dari sebuah citra diawali dengan menentukan koordinat titik pusat 5, ` . Pada penelitian ini titik pusat ellipse
ditentukan panjang sumbu semimajor (a) dan semiminor (b) menggunakan Persamaan 15 yaitu dengan memilih 3 titik ( , ) secara acak. Hasilnya diperoleh tiga persamaan linear terhadap ], , dan c.
] − 5 + 2 − 5 − ` + c − ` = 1 (15)
Langkah-langkah yang dilakukan untuk menentukan panjang sumbu
semimajor dan semiminor adalah (Inverso 2006):
1. Ellipse dijabarkan ke titik asal untuk mereduksi Persamaan 15 menjadi Persamaan 16:
] + 2 + c = 1 (16)
Hal ini dilakukan dengan mengurangkan 5 dari dan ` dari untuk tiga titik yang dipilih diawal yaitu d , d , dan dM.
2. Sistem persamaan linear seperti pada Persamaan 17 diselesaikan untuk menemukan koefisien ], , dan c.
e] + 2] + 2 + c = 1+ c = 1 ] M + 2 M M+ c M = 1
f (17)
3. Panjang sumbu semimajor (a) dan semiminor (b) diperoleh dengan menyelesaikan Persamaan 18 dan 19.
gXh ha ij a = k|]C | (18)
gXh h ;ij(b) = k|cC | (19)
Ellipse dapat dideskripsikan dengan koordinat titik pusat (5, `), panjang sumbu semimajor dan panjang sumbu semiminor. Definisi quin-tuple (5, `, a, b) yang digunakan dalam implementasi ini, berdasarkan persamaan yang diturunkan oleh Inverso (2006) untuk menemukan ellipse dalam citra. Orientasi ellipse tidak digunakan karena tidak ada persamaan yang dapat ditemukan untuk mendapatkan informasi orientasi ellipse dalam citra. Karena orientasi ellipse tidak disimpan, implementasi ini hanya mendeteksi ellipse dengan sumbu utama 0° dan 90° dari sumbu . Namun, keterbatasan ini dianggap kecil sehubungan dengan permasalahan lain secara keseluruhan.
Pengecekan Keberadaan Ellipse dalam Citra
Ellipse yang ditemukan perlu dipastikan keberadaannya dalam citra. Karena bisa saja ellipse tersebut melebihi ukuran citra. Pengecekan untuk memastikan keberadaan ellipse dalam citra ada dua tahap, yaitu (Inverso 2006):
1. Ellipse didefinisikan dengan persamaan umum kerucut seperti pada Persamaan 20:
Tanda 4]c − menentukan tipe irisan kerucut. Jika 4]c − > 0, maka merupakan sebuah ellipse atau lingkaran.
2. Meskipun persamaan ellipse terpenuhi, mungkin ellipse tidak mempunyai piksel yang cukup dalam citra. Penentuan ada atau tidaknya ellipse dalam citra menggunakan Persamaan 21 dan 22 untuk menghasilkan titik-titik perimeter ellipse dalam citra.
= a × cos θ (21)
= b × sin θ (22)
Jumlah titik-titik yang dihasilkan sama dengan keliling ellipse yang ditentukan dengan Persamaan 23:
yXz z ;S = { × gXh ha ij × gXh h ;ij (23)
Titik-titik ini digunakan untuk menghasilkan mask dari ellipse. Jumlah piksel dalam citra yang baru dihitung dan dibagi dengan keliling ellipse sehingga menghasilkan rasio piksel untuk keliling. Jika rasio lebih besar dari threshold
yang ditentukan oleh user, maka ellipse ada pada citra. Accumulating
Parameter-parameter ellipse ditemukan dan diperiksa keberadaannya dalam citra. Accumulator akan menyimpan parameter-parameter 5, `, a, b dan gyij dari sebuah ellipse. Titik-titik ellipse dihasilkan dengan menyelesaikan Persamaan 21 dan 22 untuk # = 0 sampai 2{.
Jumlah titik-titik yang dihasilkan sama dengan jumlah nilai yang digunakan antara interval 0,2{ . Dalam algoritme ini jumlah nilai yang dihasilkan sama dengan lingkaran ellipse. Tiga langkah yang dilakukan untuk mengakumulasi
ellipse dengan pusat (5, `), semimajor (a) dan semiminor (b) adalah (Inverso 2006):
1. Untuk semua ellipse (5 , ` , a , b) dalam accumulator:
a. |a − a| < semimajor_axis_threshold
b. |b − b| < gXh h ;ij_axis_threshold
2. Untuk setiap ellipse dalam accumulator yang memenuhi kondisi pertama. Rata-rata bobot setiap parameter ellipse ditampilkan (menggunakan skor sebagai bobot). Ellipse di accumulator digantikan dengan ellipse yang baru diboboti, kemudian skor untuk ellipse ini dinaikkan 1. Perhitungan rata-rata bobot panjang sumbu semimajor didefinisikan seperti pada Persamaan 24:
rataan bobot panjang sumbu semimajor =ˆK׉Š‹ŒNˆ
‰Š‹ŒN (24)
3. Jika tidak ada ellipse di accumulator yang memenuhi kondisi 1 dan 2. Ellipse
Operasi Morfologi
Morfologi adalah teknik yang didasarkan pada teori himpunan dan dapat digunakan untuk binary image processing dan gray image processing (Gui dan Wei 2003). Operasi dasar matematika morfologi adalah dilasi dan erosi. Operasi morfologi lainnya seperti opening dan closing disintesis dari dua operasi dasar ini. Diberikan citra , atau , dengan , ∈ atau R , dan structuring
Erosi pada dasarnya adalah mengurangi nilai grayscale citra untuk memperkecil ukuran obyek dengan mengikis sekeliling obyek. Dilasi adalah kebalikan dari erosi, yaitu meningkatkan nilai grayscale citra untuk memperbesar ukuran segmen obyek dengan menambah lapisan di sekeliling obyek (Bai 2010). Operasi dilasi pada binary image processing dalam penelitian ini digunakan untuk mempertebal hasil segmentasi sebelum tahapan penentuan area krop. Operasi erosi pada gray image processing digunakan untuk pendeteksian lubang-lubang pada krop.
Cross Validation
Cross validation digunakan untuk memvalidasi model klasifikasi karena kecilnya jumlah sampel yang tersedia. Cross validation membuat penggunaan data menjadi lebih baik. Objek yang diprediksi sama sekali tidak digunakan dalam pengembangan model. Cross validation membagi data menjadi dua bagian. Satu bagian digunakan sebagai training set (data latih), yaitu untuk membuat parameter model dalam classifier. Bagian lainnya merupakan test set (data uji) yang digunakan untuk menguji kinerja model. Prosedur diulang dengan cara setiap sampel hanya sekali menjadi test set. Kesalahan prediksi (prediction error) adalah representasi untuk sampel-sampel yang baru (Duda et al. 2000; Westerhuis et al.
2008).
K-fold cross validation merupakan teknik resampling yang membagi data menjadi k subdata. Setiap subdata berjumlah z y⁄ data dengan l adalah jumlah seluruh data, y − 1subdata digunakan sebagai data latih dan satu subdata lainnya digunakan sebagai data uji. Akurasi cross validation merupakan jumlah seluruh hasil klasifikasi yang benar dibagi dengan jumlah seluruh data (Anguita et al.
Confusion Matrix
Salah satu metode untuk mengevaluasi kinerja classifier adalah menggunakan confusion matrix. Confusion matrix merangkum jumlah data yang diprediksi benar atau salah oleh model klasifikasi. Confusion matrix lebih sering disebut dengan tabel kontingensi. Tabel 1 adalah confusion matrix untuk masalah dua kelas yang diberi label kelas positif (+) dan kelas negatif (-). Oleh karena itu
confusion matrix berukuran 2 × 2, matriks dapat berukuran lebih besar. Jumlah data yang diklasifikasikan dengan benar adalah jumlah diagonal dalam matriks, sedangkan yang lainnya adalah yang salah diklasifikasikan (Srinivasulu et al.
2009).
Tabel 1 Confusion matrix untuk masalah klasifikasi biner Predicted class
+ -
Actual class
+ TP FN
- FP TN
Terminologi berikut ini sering digunakan ketika mengacu pada jumlah yang ditabulasikan dalam confusion matrix (Srinivasulu et al. 2009):
1. True positive (TP): jumlah data positif yang dengan benar diprediksi oleh model klasifikasi.
2. False negative (FN): jumlah data positif yang salah diprediksi. Diprediksi sebagai negatif oleh model klasifikasi.
3. False positive (FP): jumlah data negatif yang salah diprediksi. Diprediksi sebagai positif oleh model klasifikasi.
4. True negative (TN): jumlah data negatif yang dengan benar diprediksi oleh model klasifikasi.
Akurasi kinerja classifier ditentukan berdasarkan rasio antara jumlah data yang dapat diklasifikasikan dengan benar dan total jumlah data. Secara teknis dapat didefinisikan seperti pada Persamaan 27 (Kumar dan Rathee 2011).
3
METODE PENELITIAN
Penelitian ini membangun suatu sistem pendugaan tingkat serangan ulat pada pertanaman kubis berdasarkan citra. Pengamatan tingkat serangan ulat
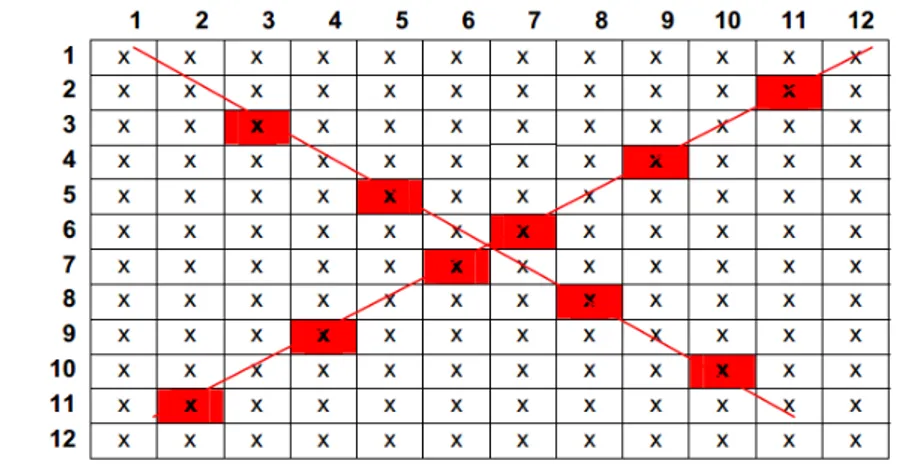
P. xylostella dan/atau C. pavonana pada area pertanaman kubis tidak mungkin dilakukan pada semua populasi tanaman yang ada. Hal ini disebabkan oleh keterbatasan tenaga, biaya, dan waktu. Pengamatan kerusakan tanaman dilakukan pada tanaman contoh yang ditetapkan secara acak diagonal seperti ditunjukkan pada Gambar 4 (Warduna et al. 2011).
Gambar 4 Skema penentuan tanaman contoh yang diamati
Sistem pendugaan tingkat serangan ulat pada pertanaman kubis berdasarkan citra yang dibangun dalam penelitian ini diilustrasikan pada Gambar 5.
Sangat Berat Berat Sedang Ringan Sehat
Daerah yang dicurigai terserang OPT dilakukan akuisisi citra. Teknik akuisisi citra untuk pemilihan tanaman contoh pada area pertanaman kubis dilakukan secara acak diagonal. Hasil akuisisi citra diolah di server sehingga dapat ditentukan tingkat kerusakan per individu tanaman. Tingkat serangan ulat pada area pertanaman kubis dihitung berdasarkan rata-rata bobot tingkat kerusakan dari seluruh tanaman contoh yang diamati tersebut. Tingkat serangan ulat dikelompokkan dalam lima kategori, yaitu: sangat ringan/sehat, ringan, sedang, berat dan sangat berat.
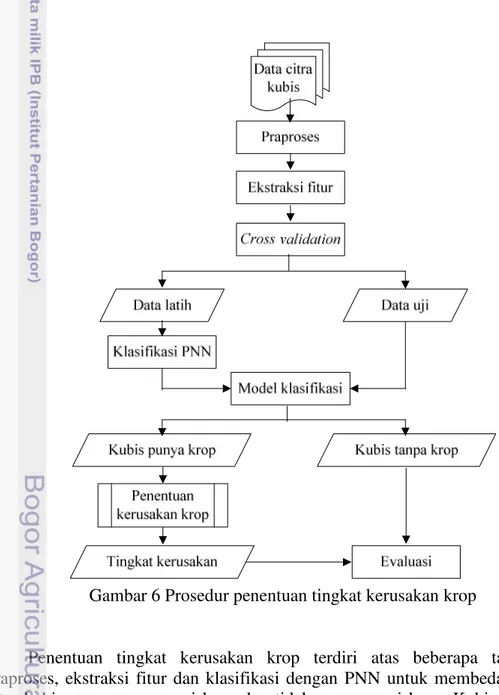
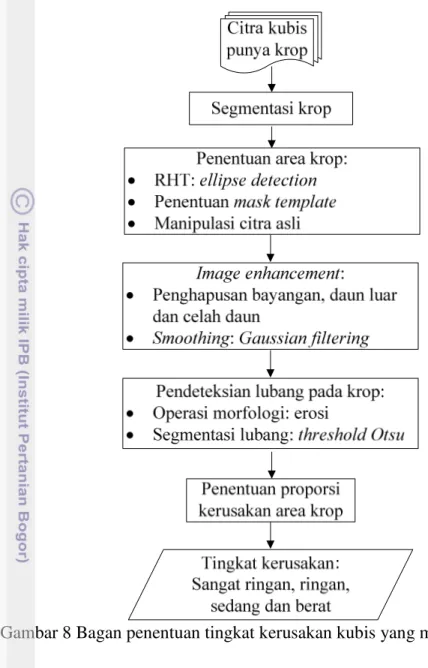
Pendugaan tingkat serangan ulat pada suatu area pertanaman kubis, diawali dengan penentuan tingkat kerusakan dari individu tanaman contoh yang diamati. Tingkat kerusakan per individu tanaman ini direpresentasikan oleh tingkat kerusakan krop dari citra kubis. Tahapan untuk penentuan tingkat kerusakan krop dari citra kubis ditunjukkan pada Gambar 6.
Gambar 6 Prosedur penentuan tingkat kerusakan krop
Sementara itu kubis yang mempunyai krop dilakukan beberapa proses untuk mendapatkan area yang rusak pada krop sehingga dapat ditentukan tingkat kerusakannya. Tingkat kerusakan kubis yang mempunyai krop adalah sangat ringan/sehat, ringan, sedang, dan berat. Tahap akhir adalah evaluasi terhadap hasil klasifikasi untuk mengetahui kemampuan sistem dalam penentuan tingkat kerusakan krop.
Data Penelitian
Data penelitian yang digunakan adalah citra kubis yang sehat dan yang diserang oleh ulat P. xylostella dan/atau C. pavonana. Data diperoleh dari Cipanas, Bogor. Pemotretan dilakukan menggunakan lima kamera digital yang berbeda. Pengambilan foto dilakukan dari bagian atas objek tepat pada krop saat kubis dalam fase pembentukan krop.Citra yang digunakan berformat JPEG (Joint Photographic Experts Group). Contoh citra yang digunakan ditunjukkan pada Gambar 7.
(a) Sehat (b) Ringan (c) Sedang (d) Berat (e) Sangat Berat Gambar 7 Contoh citra yang digunakan berdasarkan kategorinya
Penelitian ini menggunakan 500 citra kubis. Citra kubis diklasifikasikan berdasarkan tingkat kerusakan kropnya ke dalam lima kategori, yaitu: kerusakan sangat ringan/sehat, ringan, sedang, berat, dan sangat berat. Agar memudahkan klasifikasi, terlebih dahulu dibedakan apakah kubis yang diamati mempunyai krop atau tidak mempunyai krop. Jumlah citra kubis berdasarkan ada atau tidak adanya krop dapat dilihat pada Tabel 2.
Tabel 2 Citra kubis berdasarkan ada atau tidak adanya krop
Kategori Jumlah
Mempunyai krop 470
Tidak mempunyai krop (sangat berat) 30
Tabel 3 Citra kubis yang mempunyai krop
Tahap praproses dilakukan untuk mempersiapkan citra yang digunakan sebelum masuk ke tahap ekstraksi fitur. Tahap awal praproses adalah mengubah
Ekstraksi fitur tekstur menggunakan gray level co-occurrence matrix
(GLCM). GLCM adalah salah satu metode statistika yang dapat digunakan untuk analisis tekstur. Fitur yang dipilih adalah contrast, correlation, dissimilarity dan
homogeneity. Langkah awal untuk mendapatkan informasi tekstur dari citra adalah menentukan co-occurrence matrix. Co-occurrence matrix dihitung dalam arah horizontal 0° dan 180° dengan jarak 1 piksel. Setiap citra menghasilkan sebuah co-occurrence matrix. Nilai contrast, correlation, dissimilarity, dan
homogeneity dihitung untuk co-occurrence matrix tersebut sehingga setiap fitur mempunyai sebuah nilai. Informasi tekstur untuk setiap citra direpresentasikan sebagai sebuah vektor yang memiliki empat elemen fitur. Informasi fitur ini menjadi masukan untuk proses klasifikasi dengan PNN.
Pembagian Data Latih dan Uji
Data dibagi menjadi dua bagian, yaitu data latih dan uji. Hasil ekstraksi fitur dari data latih digunakan sebagai masukan untuk pelatihan dengan PNN, sedangkan hasil ekstraksi fitur dari data uji digunakan untuk menguji model hasil pelatihan. Pengujian dilakukan untuk mengetahui kemampuan model dalam mengklasifikasikan kubis yang mempunyai krop dan tidak mempunyai krop.
Pembagian data latih dan uji untuk klasifikasi dengan PNN menggunakan metode k-fold cross validation. Pada penelitian ini menggunakan nilai y = 5 sehingga disebut 5-fold cross validation. Tujuannya adalah agar persentase data latih dan uji masing-masing sebesar 80% dan 20%.
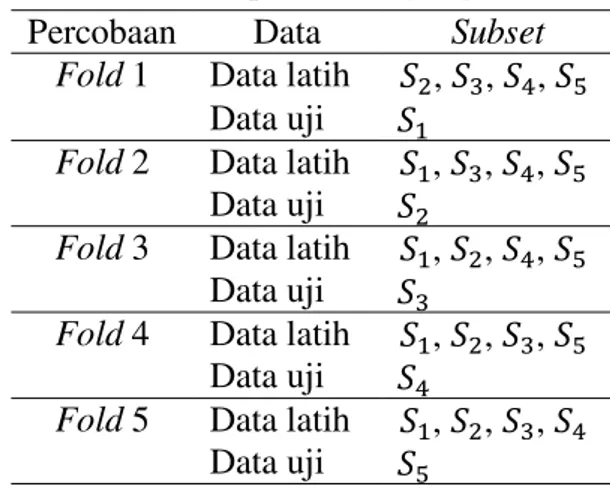
Skenario percobaan yang dilakukan seperti ditunjukkan pada Tabel 4. Data dibagi menjadi lima subset. Setiap subset digunakan sebagai data uji dan empat
latih dan 100 citra sisanya digunakan sebagai data uji dalam setiap percobaan yang dilakukan.
Tabel 4 Skenario percobaan yang dilakukan Percobaan Data Subset menggunakan PNN. Arsitektur PNN terdiri atas lapisan masukan, pola, penjumlahan dan keputusan. Lapisan masukan berupa vektor hasil ekstraksi fitur dari citra kubis. Pada lapisan pola, digunakan satu model PNN dengan nilai bias tetap. Bias merupakan suatu nilai parameter yang berguna untuk menghaluskan fungsi kernel. Nilai bias tidak dapat ditentukan secara langsung, tetapi didapatkan melalui hasil percobaan. Selanjutnya dihitung jarak vektor pelatihan ke vektor pengujian dan menghasilkan vektor yang mengindikasikan kedekatan input ke vektor pelatihan. Setiap keluaran dari lapisan pola dijumlahkan dengan keluaran dari lapisan pola lainnya yang berada dalam satu kelas untuk menghasilkan probabilitas vektor keluaran pada lapisan penjumlahan. Lapisan keputusan mengambil nilai maksimum dari vektor keluaran. Lapisan keputusan memiliki dua target kelas yaitu kubis yang mempunyai krop dan tidak mempunyai krop.
Penentuan Tingkat Kerusakan Krop
Gambar 8 Bagan penentuan tingkat kerusakan kubis yang mempunyai krop
Segmentasi Krop
Segmentasi merupakan tahap awal dari penentuan tingkat kerusakan krop. Segmentasi bertujuan mendapatkan kandidat titik-titik yang menjadi masukan bagi RHT dalam mendeteksi krop. Teknik segmentasi krop yang digunakan berdasarkan penelitian Cheddad et al. (2009) dan Yogarajah et al. (2010). Matriks transformasi š› = 0.2989 0.5870 0.1402 “ digunakan untuk mentransformasikan matriks 3 dimensi ∅ menjadi vektor ž menggunakan Persamaan 28:
ž = arg ha %∈ ,⋯,D8¡( ), ¢( )9 (29) dengan ; adalah panjang channel R dan B. Untuk setiap nilai , ditentukan
error£ yang didefinisikan seperti pada Persamaan 30:
£( ) = ž( ) − ž ( ). (30)
Nilai maksimum dari £ digunakan sebagai threshold untuk segmentasi citra
grayscale ( , ) seperti yang didefinisikan pada persamaan 31.
b( , ) = 1, ( , ) ≥ max (¤)0, ( , ) < max (¤) (31)
Hasil segmentasi berupa citra biner b( , ). Agar kandidat titik-titik untuk RHT yang diperoleh menjadi lebih banyak maka hasil segmentasi dipertebal dengan operasi dilasi.
Penentuan Area Krop
Area krop ditentukan sesuai dengan ukuran ellipse yang terdeteksi pada citra kubis. Penelitian ini memilih untuk menyesuaikan ukuran krop dengan ukuran
ellipse daripada ukuran lingkaran karena ellipse lebih fleksibel dibandingkan dengan lingkaran. Lingkaran merupakan ellipse dengan panjang sumbu semimajor
dan semiminor yang berukuran sama.
Metode yang digunakan untuk mendeteksi ellipse pada citra kubis adalah
randomized hough transform (RHT). Inverso (2006) telah mengembangkan algoritme untuk mendeteksi ellipse dengan RHT. Algoritme RHT adalah sebagai berikut:
Menemukan ellipse yang potensial
if (ellipse mirip dengan ellipse dalam accumulator)
Rata-ratakan dua ellipse dan hasilnya
menggantikan ellipse di accumulator.
Hapus piksel-piksel ellipse terbaik dari citra. Bersihkan accumulator.
Algoritme dijalankan untuk beberapa epoch, proses untuk menemukan
ellipse pada setiap epoch melalui akumulasi. Algoritme selesai ketika jumlah maksimum epoch tercapai atau tidak menemukan ellipse untuk sejumlah epoch
tertentu. Hal ini memungkinkan user untuk menentukan epoch maksimum yang besar.
Selama perulangan for, ellipse yang ditemukan diakumulasi dan diberi skor. Semakin besar jumlah iterasi, semakin besar kemungkinan beberapa ellipse
yang mirip terakumulasi menjadi single ellipse dan diberikan skor yang lebih tinggi. Pada akhir perulangan for, accumulator mencari ellipse dengan skor yang tinggi yang akan ditempatkan dalam tabel ellipse terbaik (best ellipse). Untuk mengurangi kerja yang berlebihan, ellipse terbaik yang ditemukan dihapus dari citra. Karena ellipse terbaik sudah tidak ada lagi, accumulator dihapus. Dengan cara ini, ellipse yang sebelumnya ditemukan tidak akan menghasilkan nilai yang tinggi dalam accumulator membayangi ellipse yang tidak ditemukan.
Ukuran ellipse yang terdeteksi pada citra digunakan untuk membuat mask template dengan memberikan nilai piksel hitam (nilai 0) pada area di luar ellipse
dan nilai piksel putih (nilai 1) pada area di dalam ellipse. Tujuannya adalah menjadikan area di luar ellipse sebagai background dan area di dalam ellipse
sebagai Region of Interest (ROI) yaitu krop. Penentuan ROI dilakukan dengan memanipulasi nilai piksel citra asli kubis berdasarkan citra mask template yang terbentuk. Dengan mengetahui titik-titik spasial , yang bernilai 0 (hitam) pada citra mask template, selanjutnya memberikan nilai 0 untuk posisi titik-titik spasial yang sama pada citra asli kubis. Akhirnya diperoleh hasil deteksi krop dengan area di dalam ellipse sama seperti citra aslinya. Ilustrasi proses deteksi krop ditunjukkan pada Gambar 9.
Segmentasi Deteksi ellipse Mask template Deteksi krop Gambar 9 Proses deteksi krop
Image Enhancement
Perbaikan citra (image enhancement) bertujuan memproses citra sehingga menghasilkan citra yang lebih baik dibandingkan dengan citra asli untuk digunakan pada proses selanjutnya (Gonzales dan Woods 2002). Ada dua proses yang dilakukan untuk memperbaiki citra, yaitu penghapusan bayangan (shadow removing) dan penghalusan citra (smoothing).
Penghapusan bayangan bertujuan menghilangkan bayangan yang ada pada
citra kubis. Ruang warna citra diubah dari RGB menjadi HSV (H–hue, S–saturation, V-value). Dalam ruang warna HSV, piksel di wilayah bayangan
interval 0°, 360° . Setelah mempelajari histogram channel H dari 500 citra kubis.
Threshold yang digunakan berdasarkan nilai hue dengan jumlah bin maksimum. Supaya hasil penghapusan bayangan menjadi baik, nilai hue berdasarkan jumlah
bin maksimum yang diperoleh ditambahkan 10°. Hasil penjumlahan ini digunakan sebagai threshold untuk penghapusan bayangan, daun luar dan celah antara daun luar dengan bagian krop seperti didefinisikan pada Persamaan 32.
∅8j , , S , , b , 9 = 255; §( , ) ≥ (¨a _b ; + 10°) (32) Piksel dengan nilai hue§ yang lebih besar dari threshold adalah bayangan, daun luar dan celah antara daun luar dengan bagian krop. Citra RGB ∅ hasil penentuan area krop yang memenuhi kondisi threshold ini dimanipulasi dengan memberikan warna putih (nilai 255) pada masing-masing channel R, G dan B. Ilustrasinya seperti pada Gambar 10.
(a)Sebelum (b) Sesudah
Gambar 10 Penghapusan bayangan, daun luar dan celah daun
Tahap image enhancement selanjutnya adalah penghalusan citra (smoothing). Tujuannya mengurangi noise atau lipatan-lipatan daun kubis agar menjadi lebih halus sehingga tidak terdeteksi sebagai lubang. Smoothing
dilakukan dengan menerapkan Gaussian filtering. Sebelum penerapan Gaussian filtering, citra hasil penghapusan bayangan, daun luar dan celah antara daun luar dengan bagian krop terlebih dahulu diubah menjadi citra grayscale.
Pendeteksian Lubang pada Krop
Deteksi lubang pada krop menggunakan operasi morfologi, yaitu erosi. Operasi erosi diterapkan pada citra hasil image enhancement. Hasil operasi erosi yang diperoleh selanjutnya disegmentasi dengan threshold Otsu untuk mendapatkan lubang-lubang akibat kerusakan oleh ulat, yaitu berupa piksel-piksel hitam. Ilustrasi alur deteksi lubang ditunjukkan pada Gambar 11.
Gambar 11 Alur deteksi lubang Operasi morfologi: erosi
Penentuan Proporsi Kerusakan Area Krop
Proporsi kerusakan area krop diperoleh dengan menentukan luas area yang rusak pada krop terhadap luas keseluruhan area krop. Li et al. (2012) menentukan area yang rusak berdasarkan jumlah nilai piksel 0 (hitam). Proporsi kerusakan area krop (3) dihitung menggunakan Persamaan 33.
3 =«©‰©¬ªŒª-ˆD ˆŒ©ˆ ŠŒ‹FQŒ©ˆ ŠŒ‹F Œª‰ˆŠ × 100% (33)
Tingkat kerusakan krop diklasifikasikan sesuai dengan nilai proporsi yang diperoleh dari Persamaan 33 berdasarkan Tabel 5.
Tabel 5 Proporsi tingkat kerusakan krop pada kubis yang mempunyai krop Tingkat kerusakan Proporsi kerusakan krop (%)
Sangat ringan/sehat 0 ≤ 3 ≤ 5
Ringan 5 < 3 ≤ 15
Sedang 15 < 3 ≤ 35
Berat 3 > 35
Evaluasi
Evaluasi penentuan tingkat kerusakan menggunakan confusion matrix.
Confusion matrix lebih sering disebut dengan tabel kontingensi dijelaskan dalam Srinivasulu et al. (2009) serta Kumar dan Rathee (2011). Kinerja model klasifikasi PNN dalam mengklasifikasikan kubis yang mempunyai krop dan tidak mempunyai krop, serta penentuan tingkat kerusakan krop berdasarkan proporsi ditentukan dengan akurasi yang dicapai. Model klasifikasi PNN yang digunakan untuk sistem pendugaan tingkat serangan ulat adalah model klasifikasi dengan akurasi terbaik. Model dengan akurasi terbaik diperoleh setelah melakukan lima percobaan berdasarkan metode pembagian data 5-fold cross validation.
Pendugaan Tingkat Serangan Ulat pada Pertanaman Kubis
Tingkat serangan ulat P. xylostella dan/atau C. pavonana pada pertanaman kubis ditentukan berdasarkan rata-rata bobot tingkat kerusakan krop dari tanaman contoh yang diamati. Bobot tiap tingkat kerusakan krop seperti pada Tabel 6.
Tingkat serangan ulat pada area pertanaman kubis dihitung menggunakan Persamaan 34.
= ∑(D×°)=×± × 100% (34)
dengan
= tingkat serangan ulat
$ = jumlah tanaman yang diamati
; = jumlah tanaman yang memiliki bobot yang sama
² = bobot tiap tingkat serangan
R = bobot tertinggi
Kategori tingkat serangan ulat pada pertanaman kubis ditentukan berdasarkan persentase tingkat serangan yang diperoleh. Kategori tersebut seperti ditunjukkan pada Tabel 7.
Tabel 7 Kategori tingkat serangan ulat
Kategori Persentase tingkat serangan (%) Sangat ringan/sehat 0 ≤ < 10
Ringan 10 ≤ < 25
Sedang 25 ≤ < 50
Berat 50 ≤ < 75
Sangat berat 75 ≤ ≤ 100
Perangkat Keras dan Perangkat Lunak
Perangkat keras yang digunakan dalam penelitian ini adalah Processor IntelCore i5 2450 M 2.5 Turbo 3.1 Ghz, memori DDR3 RAM 4 GB dan harddisk
500 GB. Perangkat lunak yang digunakan adalah Sistem Operasi Windows 7,
Library OpenCV 2.2, CodeBlocks versi 10.05, XAMPP version 1.7.2 dan PHP
4
HASIL DAN PEMBAHASAN
Sistem pendugaan tingkat serangan ulat pada pertanaman kubis berdasarkan citra menggunakan citra kubis yang sehat dan yang diserang oleh ulat P. xylostella
dan/atau C. pavonana sebagai masukan. Untuk mengevaluasi kemampuan sistem dalam pendugaan tingkat serangan ulat digunakan 400 citra sebagai data latih dan 100 citra sebagai data uji. Tingkat serangan ulat pada pertanaman kubis mempunyai lima kategori, yaitu: sangat ringan/sehat, ringan, sedang, berat dan sangat berat.
Praproses Citra Kubis
Praproses bertujuan mengurangi waktu pemrosesan data (running time). Citra kubis yang awalnya berupa citra RGB diubah menjadi grayscale. Citra
grayscale ini menjadi masukan untuk tahap ekstraksi fitur tekstur. Hasil tahap praproses dari citra kubis ditunjukkan pada Gambar 12.
Citra RGB Citra grayscale Citra RGB Citra grayscale
(a) Mempunyai krop (b) Tidak mempunyai krop Gambar 12 Hasil praproses citra kubis
Ekstraksi Fitur Tekstur Citra Kubis dengan GLCM
Ekstraksi fitur tekstur mempunyai input berupa citra grayscale hasil praproses. Ekstraksi fitur tekstur diawali dengan membentuk co-occurrence matrix. Co-occurrence matrix dibentuk dari suatu citra dengan melihat hubungan ketetanggaan antar dua piksel pada jarak dan orientasi sudut tertentu. Citra input
dikuantisasi derajat keabuannya pada jarak ! = 1 piksel serta orientasi arah horizontal yaitu # = 0° dan # = 180°. Oleh karena itu untuk setiap citra diperoleh sebuah co-occurrence matrix dengan ukuran matkriksnya sebesar jumlah nilai
gray level yang berbeda pada suatu citra. Ukuran co-occurrence matrix maksimal adalah 256 × 256.
Tabel 8 Hasil 4 fitur tekstur dari citra kubis
Citra kubis Contrast Correlation Dissimilarity Homogeneity
117.988 0.97553 6.28012 0.22037
⋮ ⋮ ⋮ ⋮ ⋮
255.241 0.953718 9.42372 0.178697
Sebaran data dari empat fitur tekstur untuk citra yang mempunyai krop dan tidak mempunyai krop dapat dilihat dari histogram hasil ekstraksi fitur. Histogram hasil ekstraksi fitur contrast, correlation, dissimilarity, dan homogeneity dari masing-masing 30 sampel citra yang mempunyai krop dan tidak mempunyai krop ditunjukkan pada Gambar 13 sampai 16.
560 Histogram fitur contrast citra kubis mempunyai krop dan tanpa krop
Gambar 13 Histogram fitur contrast citra kubis punya krop dan tanpa krop
citra kubis tidak mempunyai krop memiliki intensitas gray level dengan variasi yang besar antara sebuah piksel dan piksel tetangganya.
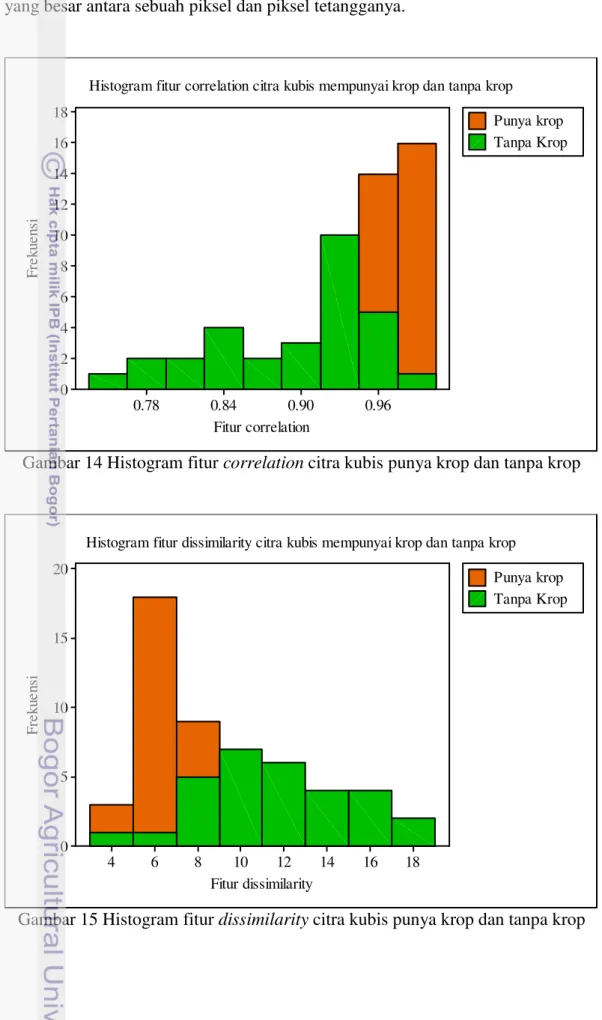
0.96 Histogram fitur correlation citra kubis mempunyai krop dan tanpa krop
Gambar 14 Histogram fitur correlation citra kubis punya krop dan tanpa krop
18 Histogram fitur dissimilarity citra kubis mempunyai krop dan tanpa krop
Fitur correlation dapat digunakan untuk menunjukkan keterkaitan antara sebuah piksel dengan piksel tetangganya dalam keseluruhan citra. Berdasarkan histogram nilai correlation seperti ditunjukkan pada Gambar 14, dapat dilihat bahwa citra kubis mempunyai krop memiliki keterkaitan yang tinggi antara sebuah piksel dengan piksel tetangganya. Sementara itu, keterkaitan antara sebuah piksel dengan piksel tetangganya pada citra kubis yang tidak mempunyai krop adalah lebih beragam.
Interpretasi fitur dissimilarity hampir serupa dengan fitur contrast. Nilai
dissimilarity dari citra kubis yang mempunyai krop adalah rendah. Hal ini menunjukkan bahwa citra kubis yang mempunyai krop memiliki keseragaman spasial gray level pada citranya. Sementara itu, citra kubis tidak mempunyai krop memiliki intensitas gray level yang bervariasi.
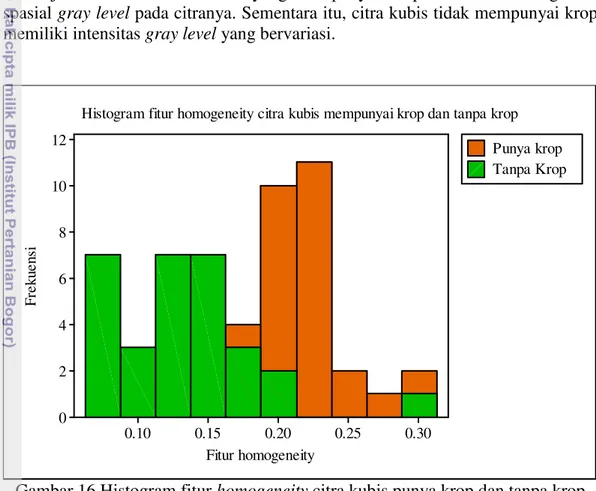
0.30 Histogram fitur homogeneity citra kubis mempunyai krop dan tanpa krop
Gambar 16 Histogram fitur homogeneity citra kubis punya krop dan tanpa krop
Fitur homogeneity dapat menunjukkan kemiripan antara intensitas gray level
dari piksel-piksel citra. Dari Gambar 16 dapat dilihat bahwa secara umum, citra kubis yang mempunyai krop memiliki nilai homogeneity lebih besar dibandingkan dengan citra kubis tidak mempunyai krop. Hal ini berarti bahwa intensitas gray level dari setiap pasangan piksel citra kubis yang mempunyai krop adalah
homogen. Sementara itu, intensitas gray level dari sebagian besar citra kubis yang tidak mempunyai krop adalah tidak homogen.
Berdasarkan analisis yang telah dilakukan, maka dapat disimpulkan bahwa keempat fitur Haralick yang digunakan dalam penelitian ini, dapat membedakan antara citra kubis mempunyai krop dan tidak mempunyai krop. Fitur-fitur