LAPORAN KERJA PRAKTIK
SIMULASI PERANCANGAN SMART TEMPORARY BOGIE
DI PT. INKA (PERSERO)
KERJA PRAKTIK
Program Studi S1 Sistem Komputer
Oleh:
BARUNA ADI LAKSANA 12410200068
FAKULTAS TEKNOLOGI DAN INFORMATIKA
i
LAPORAN KERJA PRAKTIK
SIMULASI PERANCANGAN SMART TEMPORARY BOGIE
DI PT. INKA (PERSERO) MADIUN
KERJA PRAKTIK
Program Studi S1 Sistem Komputer
Oleh:
BARUNA ADI LAKSANA 12410200068
FAKULTAS TEKNOLOGI DAN INFORMATIKA
xi
BAB II GAMBARAN UMUM PT. INKA ...7
xii
BAB III LANDASAN TEORI ...46
xiii
4.5.1 Ketepatan Memilih Bantalan...64
4.5.2 Bantalan Luncur ...66
4.6 Instalasi Sistem Kontrol ...67
BAB V PENUTUP ...69
5.1 Kesimpulan ...69
5.2 Saran ...69
BAB I
PENDAHULUAN
Pada bab satu ini penulis menjelaskan latar belakang mengapa penulis membuat Simulasi Perancangan Smart Temporary Bogie pada divisi Teknologi Produksi PT. INKA (Persero) Madiun, serta menjelaskan perumusan dan batasan masalah yang ada pada kerja praktik dan menjelaskan tujuan dari kerja praktik.
I.I LATAR BELAKANG MASALAH
Pertumbuhan teknologi dewasa ini telah berkembang luas. Khususnya di Indonesia sendiri sebagai negara berkembang pertumbuhan teknologi di dunia industri terus meningkat setiap tahunnya. Transportasi pun juga ikut berkembang sesuai dengan kemajuan teknologi karena permintaan akan pasar terus meningkat di tiap daerah.
Sebagai mahasiswa Sistem komputer, kita dituntut untuk dapat melakukan analisa dan implementasi dalam dunia industri dengan berbekal ilmu dan pengetahuan yang telah dipelajari di perkuliahan. Dalam program studi sistem komputer terbagi dalam 2 kelompok keahlian, yaitu :
1. Kelompok keahlian Otomasi Industri 2. Kelompok keahlian Jaringan
Dimana kereta api mengalami pertumbuhan dan perkembangan yang semakin meningkat khususnya di pulau Jawa dengan jalur Rel Kereta Api membentang dari ujung barat yaitu Labuan, Kab.Pandeglang Banten dan ujung timur pulau Jawa yaitu Banyuwangi. Dimana masyarakat telah meningkat akan minatnya menggunakan transportasi kereta api ini yang memudahkan masyarakat yang menuju ke daerah dan seluruh kota khususnya di pulau Jawa dengan mudah. Dan saat ini satu-satunya industri perkereta api-an di Indonesia adalah PT. INKA (Persero).
PT. INKA (Persero) dalam transportasi merupakan sebagai pihak pembuat gerbong dan perancangan lokomotif yang kemudian dikelola oleh pihak PT. KAI. Dari segi teknologi produksi PT. INKA (Persero) masih banyak menggunakan teknologi mekanik konvensional dengan tenaga manusia ataupun tenaga lain yang tidak tepat sasaran. Maka dari itu dibutuhkan inovasi baru dalam hal memperlancar sistem produksi yang dilakukan dapat tepat sasaran.
Dalam hal ini yang menarik di ulas penulis adalah cara kerja Temporary Bogie yang ada di PT. INKA (Persero) yang masih menggunakan teknologi
otomatis tanpa bantuan dorong forklift yang tidak tepat guna sebagai sarana alat dorong temporary bogie.
I.2 TUJUAN KERJA PRAKTIK
Dicapainya tujuan dari kerja praktik yang dilakukan mahasiswa adalah agar mahasiswa dapat melihat dan merasakan kondisi sebenarnya yang ada di lapangan dunia kerja sehingga dapat menambah ilmu dan wawasan lebih banyak.
Beberapa tujuan Kerja Praktik yang dimaksud adalah sebagai berikut :
1. Dapat memberikan pengalaman kepada mahasiswa tentang dunia kerja yang sebenarnya khususnya di bidang Otomasi Industri, Manufaktur, Sistem Kontrol dan Elektronika.
2. Memberikan pengetahuan tambahan tentang hal-hal yang belum atau tidak terdapat selama di perkuliahan mengenai Sistem Kontrol, Perancangan maupun Elektronika.
3. Memberikan pengetahuan dan pemahaman kepada mahasiswa mengenai penerapan di berbagai teori maupun secara praktik nyata yang diperoleh di perkuliahan dan diterapkan pada keadaan nyata di tempat praktik terutama pada bidang Otomasi dan Sistem Kontrol.
5. Mendidik dan melatih mahasiswa agar dapat menyelesaikan dan mengatasi berbagai masalah yang dihadapi di lapangan ketika melaksanakan kerja praktik.
I.3 RUMUSAN MASALAH
Berdasarkan latar belakang diatas, maka dapat di rumuskan beberapa masalah sebagai berikut :
1. Bagaimana merancang suatu control dengan baik untuk mart Temporary Bogie pada PT. INKA (Persero) ?
2. Bagaimana cara mempermudah operator mengoperasikan suatu sistem pada Smart Temporary Bogie pada PT. INKA (Persero) ?
I.4 BATASAN MASALAH
Permasalahan yang dibahas akan dibatasi oleh hal-hal berikut :
1. Sistem yang dianalisis diasumsikan dalam kondisi ideal dan faktor lingkungan tidak dipengaruhi.
2. Bentuk umum frame telah dibuat oleh pihak PT. INKA (Persero)
I.5 WAKTU DAN TEMPAT PELAKSANAAN KERJA PRAKTIK
Kerja praktik dilaksanakan di :
Tempat : PT. Industri Kereta Api (INKA) Persero
Jl. Yos Sudarso No.71, Madiun, Jawa Timur
Kegiatan kerja praktik dilaksanakan pada hari kerja yakni hari Senin – Jumat, dari pukul 07.30 – 16.30 WIB.
I.6 RUANG LINGKUP KERJA PRAKTIK
Ruang lingkup kerja praktik adalah agar mahasiswa mendapatkan pengalaman dan gambaran belajar melalui pengamatan di bidang Otomasi dan Manufaktur yaitu :
a. Mengamati alur kerja khususnya Teknologi Produksi di PT. INKA (Persero) dalam menangani proyek di workshop.
b. Menganalisa part-part dan dimensi Temporary Bogie yang masih konvensional.
c. Mendokumentasikan hal-hal yang berkaitan dengan permasalahan di lapangan untuk menunjang teknologi Smart Temporary Bogie.
I.7 SISTEMATIKA PENULISAN
Sistematika penulisan laporan hasil kerja praktik di PT. INKA (Persero) adalah sebagai berikut:
BAB I : PENDAHULUAN
BAB II : GAMBARAN UMUM PERUSAHAAN
Bab ini menguraikan tentang informasi PT. Industri Kereta Api (INKA) Persero, Madiun. visi, misi, struktur organisasi, serta deskripsi lengkap dari unit yang dimasuki.
BAB III : LANDASAN TEORI
Bab ini menguraikan tentang dasar teori, perhitungan dan gambar yang dibutuhkan sebagai penunjang guna sebagai acuan dalam merancang Smart Temporary Bogie.
BAB IV : HASIL DAN PEMBAHASAN
Pada bab ini menguraikan tentang sistematika pengambilan data dan analisa masalah. Juga deskripsi dan solusi.
BAB V : PENUTUP
BAB II
GAMBARAN UMUM PERUSAHAAN/INSTANSI
Bab dua berisi sejarah dan perkembangan, lokasi, visi, misi, struktur organisasi dan produk perusahaan PT. INKA dimana sebagai tempat kerja praktik.
2.1 Profil Perusahaan
2.1.1 Nama dan Logo Perusahaan
PT. INDUSTRI KERETA API (Persero)
Gambar 2.1 Logo PT. INKA
Pada gambar 2.1 diatas merupakan logo yang di pakai oleh PT. INKA (Persero) .
Gambar 2.2 Alamat dan Peta PT. INKA
Pada gambar 2.2 di bawah ini merupakan peta dan alamat kantor perusahaan PT. INKA (Persero) yang berada di Jl. Yos Sudarso No. 71 Madiun Lor Mangunharjo, Kota Madiun, Jawa Timur.
2.1.3 Visi Perusahaan
Visi PT Industri Kereta Api adalah “To be a world class company in railways and urban transportation in Indonesia”.
2.1.4 Misi Perusahaan
Misi dari PT Industri Kereta Api adalah “Create an integrated solution for railway and urban transportation with competitive advantages in
business and the appropriate of product technology to encourage the development
of sustainable transport”.
2.1.5 Prestasi Perusahaan
PT. Industri Kereta Api (Persero) telah mendapatkan beberapa prestasi hingga tahun 2011 sebagai berikut :
Bidang IT
Juara III Penegelola Portal Executive Information System Terbaik oleh Kementrian BUMN November 2011.
Juara II Website dengan User Interface Terbaik oleh Kementrian BUMN 2010.
Bidang Teknologi
Emas untuk Corporate Technology Achievement oloeh PII (Persatuan Insinyur Indonesia) 2010.
Perunggu untuk Adhicipta Rekayasa oleh PII (Persatuan Insinyur Indonesia) 2010.
Bidang Keuangan
BUMN kategori Industri Non Keuangan yang berpredikat Sangat Bagus dari Infobank 2011.
2.2 Sejarah Perusahaan
PT. INKA, sebagai salah satu badan usaha milik negara terus mengalami perkembangan, diawali pada tahun 1981 dengan produk berupa kereta penumpang kelas ekonomi dan gerbong barang kini menjadi industri manufaktur perkeretaapian yang modern. Aktivitas bisnis Inka yang ada kini berkembang mulai dari penghasil produk dasar menjadi penghasil produk dan jasa perkeretaapian dan transportasi yang bernilai tinggi. Transformasi bisnis yang dilakukan perusahaan mampu memberikan keberhasilan dan mendapatkan solusi terbaik untuk perbaikan transportasi kereta api. Dalam persaingan global, PT. INKA mengembangkan berbagai jenis produk di bawah kendali sistem manajemen mutu ISO 9001 dan kemitraan global.
Melalui perbaikan dan pembaharuan yang dilakukan secara berkesinambungan sebagai upaya beradaptasi terhadap persaingan global, PT. INKA memasuki dunia bisnis ini dengan mengedepankan nilai-nilai :integritas, profesional dan kualitas. Dalam menghadapi tantangan dunia bisnis ke depan, PT. INKA tidak hanya bergelut dalam produk-produk perkeretaapian, namun menghasilkan produk lain yang lebih luas yang mampu memberikan kontribusi terhadap permintaan infrastruktur dan sarana transportasi. PT. INKA melakukan joint venture dengan General Electric dalam memproduksi lokomotif. Selain untuk
kebutuhan dalam negeri, produksi juga ditujukan untuk ekspor terutama ke Malaysia.
PT. INKA setiap tahun (sejak diterapkannya GCG pada tahun 2008) telah
melakukan penilaian penerapan GCG yang dilakukan oleh pihak Eksternal, dan
pada tahun 2013 penilaian dilakukan secara self assessment untuk GCG penerapan
penerapan GCG tahun 2013, saat ini dalm prosess assessment oleh BPKP
Perwakilan Provinsi Jawa Timur.
1.Sistem Mutu
PT. INKA menerapakan sistem mutu berbasis ISO 9001 sejal tahun 1996 yang disertifikasi oleh ABS Quality Service USA. Sistem manajemen mutu ini dilakukan audit/surveylance oleh ABS Quality Service USA tiap 6 (enam) bulan sekali, selain itu juga dilakukan Audit Mutu Internal tiap 6 (enam) bulan sekali. Dan pada tahun 2012 dinyatakan bahwa sertifikat sistem mutu dapat dipertahankan. Penerapan Sistem Mutu ini terus dilakuakan INKA dalam upaya untuk terus meningkatkan kualitas proses, produk maupun pelayanan.
2.Manajemen Risiko
3.Teknologi Informasi
Perusahaan bekerjasama dengan BPPT melakukan kajian untuk pembangunan sistem informasi manajemen terintergrasi dengan menggunakan ERP (Enterpsie Resource Planning). Perusahaan telah menunjuk konsultan untuk memandu implementasi ERP tersebut. Sampai saat ini telah terimplementasi secara terintegrasi, dan terus dilakukan penyempurnaan.
Berikut ini merupakan sejarah produk yang telah dihasilkan oleh PT. INKA sejak tahun 1981:
1. 1982 – Pertama produksi gerbong barang. 2. 1985 – Pertama produksi kereta penumpang.
3. 1987 – Pertama perarakitan Railcar listrik & diversifikasi produk. 4. 1991 – Pertama gerobak angkutan ekspor ke Malaysia (KTMB). 5. 1994 – Pertama produksi Railcar listrik VVVF.
6. 1995 – Pertama peluncuran Kereta Api Argo Bromo.
7. 1996 – Pertama produksi Lokomotif (GE Lokindo) & ekspor ke Filipina.
8. 1997 – Peluncuran Pertama Kereta Argo Bromo Anggrek (leasing skema).
9. 1998 – Pertama ekspor Ballast Hopper Wagon ke Thailand.
10.2001 – Pertama peluncuran Listrik Railcar Indonesia (Desain INKA).
12.2004 – Ekspor Container Wagon tubuh & Blizzard Center kusen ke Australia.
13.2006 – Ekspor 50 unit BG kendaraan untuk Bangladesh.
14.2007 – Kontrak ditanda tangani 1 trainset DEMU untuk Aceh dan Railbus untuk Palembang (Bus rel Kertalaya). Selesai Bagasi Mobil. 15.2008 – Peluncuran pertama di Indonesia, Bus Rail KRDI (untuk
Aceh & Jawa).
16.2009 – Rangkaian baru Kereta Api Gajayana dengan model mirip Pesawat Terbang.
17.2010 – Peluncuran produksi Kereta ekonomi AC Bogowonto (Kereta Api Bogowonto), 5 Lokomotif (CC204) & New Rangkaian kereta Api Argo Jati yang berbentuk mirip dengan Rangkaian KA Gajayana yang baru.
18.2011 – Produksi Railbus untuk Solo dan Kereta ekonomi AC Gajah Wong (Kereta Api Gajah Wong).
19.2012 – Produksi beberapa Kereta ekonomi dengan AC split, 3 Lokomotif CC300, Railbus untuk kota Padang dan KRL KFW. 20.2013 – 18 Unit Articulated Bus untuk Armada Trans Jakarta.
21.2014 - Peluncuran Kereta Api AC Ekonomi Menoreh II, Sawunggalih Tambahan, New Jayabaya, dan New Jaka Tingkir dan dicat dengan livery terbaru PT KAI.
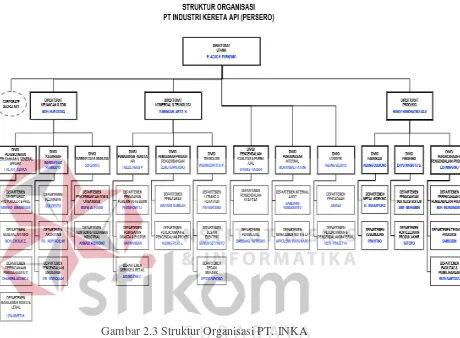
2.3 Struktur Organisasi PT. Industri Kereta Api
Gambar 2.3 Struktur Organisasi PT. INKA
Struktur organisasi PT. INKA (Persero) disusun sesuai dengan visi dan misi perusahaan yang di emban dengan sasaran jangka panjang untuk dapat diakui sebagai perusahaan kelas dunia yang unggul di Indonesia.
perusahaan dalam negeri maupun institusi akademik. Hubungan mitra kerja yang selama ini berjalan telah membuahkan hasil yang positif terhadap mutu produk-produk perusahaan.
Mitra kerja hingga saat ini adalah :
1. PT. INKA – Bombardier 2. PT. INKA – Nippon Sharyo
3. PT. INKA – Sumitomo Corporation
4. PT. INKA – Caterpillar
10.PT. INKA – Adhi Beyond Construction 11.PT. INKA – Barata Indonesia
Mitra Luar Negeri
PT. INKA (Persero) juga melakukan kerja sama dengan mitranya yang ada di Luar Negeri untuk menunjang teknologi terbaharukan dan pengembangan inovasi baru untuk produknya.
Sinergi BUMN
PT. INKA (Persero) menjalin kerja sama dengan sinergi BUMN yang di jadikan mitra kerjanya bersama PT. KAI, Adhi Beyond Construction, Barata Indonesia, PT. Pindad, Bukit Asam dan juga Len.
Mitra Litbang
2.4 Produk Perusahaan
2.4.1 Kereta Penumpang
Kereta Ekonomi AC (K3 AC)
Gambar 2.4 Kereta Ekonomi K3 AC DATA TEKNIS :
Tahun pembuatan : 2010
Kecepatan maksimum : 100 km / jam Lebar sepur : 1.067 mm Beban gandar : 14 ton Panjang kereta : 20.920 mm Lebar kereta : 2.990 mm Tinggi kereta : 3810 mm Jarak antar pusat bogie : 14.000 mm Berat kosong : 33 ton
Badan kereta : Monocoque, Mild steel
Bogie : TB-398
Sistem pengereman : UIC 540, Air Brake
Sistem listrik : 380VAC, 3 phase, 50Hz, LBS
Kereta Ekonomi (K3)
Gambar 2.5 Kereta Ekonomi K3 DATA TEKNIS :
Tahun pembuatan : 2008
Kecepatan maksimum : 100 km / jam
Lebar sepur : 1.067 mm
Beban gandar : 14 ton Panjang kereta : 20.920 mm Lebar kereta : 2.990 mm Tinggi kereta : 3.810 mm Jarak antar pusat bogie : 14.000 mm Tinggi pusat alat perangkai
dari atas rel
: 775 +10/-0 mm
Badan kereta : Monocoque, Mild steel
Bogie : TB-398
Sistem pengereman : UIC 540, Air Brake
Kereta Penumpang Kelas Eksekutif (K1 – Argo)
Gambar 2.6 Kereta Eksekutif K1 DATA TEKNIS :
Tahun pembuatan : 2009
Kecepatan maksimum : 100 km / jam
Lebar sepur : 1.067 mm
Beban gandar : 14 ton
Panjang kereta : 20.920 mm
Lebar kereta : 2.990 mm
Tinggi kereta : 3.610 mm
Jarak antar pusat bogie : 14.000 mm Tinggi pusat alat perangkai
dari atas rel
: 775 +10/-0 mm
Berat kosong maksimum : 36 ton
Badan kereta : Monocouqe, Mild steel Sistem kelistrikan : 380 Volt, 3 fasa
Bogie : NT 60
Sistem pengereman : UIC 540, Air brake
Sistem listrik : 380VAC, 3-phase, 50Hz, dengan LBS
Kereta Penumpang Bangladesh
Gambar 2.7 Kereta Penumpang Bangladesh DATA TEKNIS :
Lebar spur : 1,676 mm
Panjang kereta (Jarak antar coupler) : 22,606 mm Tinggi kereta dari rel : 3,899 mm
Jarak antar bogie : 14,630 mm
Lebar kereta : 3,251 mm
Tinggi coupler : 1,080 mm
Beban gandar : 13 ton
2.4.2 Kereta Berpenggerak
Kereta Rel Diesel Electric (KRDE)
Gambar 2.8 Kereta Rel Diesel Electric (KRDE)
DATA TEKNIS :
Tahun pembuatan : 2007
Konfigurasi : TeC – M – T – T – TC
Kapasitas penumpang : TeC = 20 (Seating)
M = 64 (Seating)
T = 64 (Seating)
TC = 54 (Seating)
Kecepatan maksimum : 100 km/jam
Lebar sepur : 1.067 mm
Beban gandar : 14 ton
Diameter roda (New / worn) : 860 mm / 800 mm Panjang total kereta termasuk alat perangkai : 20.700 mm
Lebar badan kereta : 3.180 mm
Jarak antar pusat bogie : 14.000 mm Tinggi pusat alat perangkai dari atas rel : 775 +10/-0 mm
Berat kosong : TC 32 tons ; MC 39 tons
Starting acceleration : 0.34 m/detik2 Braking decelerations : 0.8 m/detik2
Badan Kereta : monocoque , mild steel
Bogie : Tipe Bolsterless
Sistem rem : Electro pneumatic dengan sistem
blending
Alat perangkai : Automatic tight locked coupler, Bar coupler AAR NO. 10A Contour
Propulsi : Motor traksi AC, 3-phase, VVVF
Inverter with IGBT
Power supply : Genset on floor type, Diesel engine 1.350kW, 1.800rpm. Alternator AC 3-phase synchronous.
Kereta Diesel Indonesia (KRD – I )
DATA TEKNIS :
Tahun pembuatan : 2007
Konfigurasi kereta : MeC – T – T – MeC
Kapasitas penumpang : MeC 224 penumpang, T 284 penumpang
Kecepatan maksimum : 100 km/jam
Lebar sepur : 1.067 mm
Beban gandar : 14 tons
Panjang total kereta termasuk alat perangkai Tinggi pusat alat perangkai dari atas rel : 775 +10/-0 mm
Berat kosong : MeC 41 tonsT 32 tons
Carbody monocoque, mild steel
Bogie : Tipe Bolsterless
Kereta Diesel (KRD) PUSH PULL
Gambar 2.10 Kereta Diesel Push Pull
DATA TEKNIS :
Tahun pembuatan : 2008
Konfigurasi kereta : TeC1+M1+T+M2+TeC2
Kapasitas penumpang : TeC 280 penumpang
M 320 penumpang
T 320 penumpang
Kecepatan maksimum : 100 km/jam
Lebar sepur : 1.067 mm
Beban gandar : 14 tons
Alat perangkai : Automatic tight locked coupler, Bar coupler AAR NO. 10A Contour
Panjang total kereta termasuk alat Tinggi pusat alat perangkai dari atas rel : 775 +10/-0 mm
Berat kosong : TeC 43 tons, M 39 tons, T 32 tons
Carbody : monocoque ,mild steel
Bogie : Tipe Bolsterless
Sistem rem : Dynamic Brake (motor traksi) dan Air Brake tanpa blending / terpisah Alat perangkai : Automatic tight locked coupler, Bar
coupler AAR NO. 10A Contour
Propulsi : Diesel engine variable speed berdaya
min. 380 kW dan transmisi tipe hidrodinamik
Gambar 2.11 Kereta Rel Listrik
2.4.3 Gerbong Barang
Gerbong Terbuka Curah putar (KKBW)
Gambar 2.12 Gerbong Terbuka Curah Putar DATA TEKNIS :
Tahun pembuatan : 2008
Kapasitas muat max. : 50 tons Kecepatan maksimum : 80 km/jam
Lebar sepur : 1067 mm
Beban gandar : 18 ton
Panjang total gerbong termasuk alat perangkat
: 14.062 mm
Lebar gerbong : 3.080 mm
Tinggi lantai dari kepala rel : 3.025 mm Jarak antar pusat bogie : 1.676 mm Tinggi pusat alat perangkai dari atas
rel
Berat kosong (maximum) : 22.000 kg
Carbody : Mild steel
Bogie : Jenis Barber – Three piece
Sistem pengereman : UIC 540, Air brake
Alat perangkai : Automatic coupler,tipe F, Rotary dan Fixed ,AAR NO. 10A
Empty load device : Alat pengaturan tekanan pengereman – salah satu bogie
Mekanisme unloading : Rotary Dumper 180 derajat.
Gerbong Pulp Wagon
Gambar 2.13 Gerbong Pulp Wagon DATA TEKNIS:
Tahun pembuatan : 2008
Kapasitas muat max. : 50 ton
Kecepatan maksimum : 80 km/jam
Lebar sepur : 1.067 mm
Panjang total gerbong termasuk alat perangkai
: 14.050mm
Lebar gerbong : 2.700 mm
Jarak antar pusat bogie : 1.676 mm
Tinggi pusat alat perangkai dari atas rel : 775 +10/-0 mm
Berat kosong (maximum) : 22.000 kg
Carbody : Mild steel
Bogie : Jenis Barber – Three piece
Sistem pengereman : UIC 540, Air brake
Alat perangkai : Automatic coupler, AAR tipe E , AAR NO. 10A
Empty load device : Alat pengaturan tekanan pengereman – salah satu bogie
Mekanisme Loading/ unloading : Lewat atas/ roof (full opened)
Gerbong Datar (PPCW)
Tahun pembuatan : 2008
Kapasitas muat max. : 44 tons
Kecepatan maksimum : 80 km/jam
Lebar sepur : 1.067 mm
Beban gandar : 14 ton
Panjang total gerbong termasuk alat perangkai
: 14.600 mm
Lebar gerbong : 2.438 mm
Tinggi lantai dari atas rel : 935 mm Jarak antar pusat bogie : 9.800 mm Tinggi pusat alat perangkai dari atas rel : 775 +10/-0 mm Berat kosong (maximum) : 14.000 kg
Rangka dasar : Mild steel
Bogie : Jenis Barber – Three piece
Sistem pengereman : UIC 540, Air brake
Alat perangkai : Automatic coupler AAR NO. 10A.
Gerbong Datar (Eksport Singapura – LTA)
Gambar 2.15 Gerbong Datar
DATA TEKNIS :
Lebar sepur : 1435 m
Tinggi gerbong dari rel : 749 mm
Tinggi coupler : 770 mm
Beban gandar : 16 ton
Kecepatan maksimum : 65 km/jam Kapasitas angkut : 42 ton
Bogie : BARBER S2-HD
Rangka dasar : Mild Steel
Gerbong Ballast (ZZOW)
Gambar 2.16 Gerbong Ballast (ZZOW) DATA TEKNIS :
Tahun pembuatan : 2008
Lebar sepur : 1067 mm
Beban gandar : 15 Ton
Kapasitas muat (maks) : 35 Ton
Volumetric : 28 m3
Berat kosong : 18,5 Ton
Panjang rangka dasar gerbong : 12500 mm Panjang gerbong termasuk Alat perangkai : 13,300 mm
Lebar gerbong : 2.000 mm
Lebar badan gerbong : 2.459 mm
Tinggi Plate Form dari atas rel : 850 mm Jarak antar pusat bogie : 8.800 mm
Kecepatan maks. : 80 km/jam
Bogie : Super Service Ride Control Type
Gerbong Oil Tank (KKW)
Gambar 2.17 Gerbong Oil Tank (KKW)
DATA TEKNIS :
Tahun pembuatan : 2008
Lebar sepur : 1.067 mm
Beban muat maks. : 40 Ton
Volumetric : 50,6 m3
Berat kosong : 20 Ton
Panjang rangka dasar : 12.200 mm Panjang rangka dasar
termasuk alat perangkai
: 12.800 mm
Diameter dalam tangki : 2.400 mm Lebar gerbong : 2.420 mm Jarak antar pusat bogie : 8.000 mm
Diameter roda : 774 mm
Kecepatan maks : 80 km/jam
Sistem rem : Air brake
Alat perangkai : Automatic coupler
2.4.4 Produk Lainnya
KERETA FUDIKA (Fasilitas Uji Dinamik Kereta Api)
Gambar 2.18 Kereta Fudika
DATA TEKNIS :
Lebar rel : 1.067 mm
Beban gandar : 14 ton
Panjang kereta maksimum termasuk alat perangkai
: 20.920 mm
Lebar badan kereta : 2.990 mm
Tinggi atap dari kepala rel : 3.700 mm Jarak antara pusat bogie : 14.000 mm Jarak sumbu roda (wheel base )
bogie, maksimum
Tinggi sumbu alat perangkai (coupler) dari kepala rel Pada muatan kosong
: 775 +10/-0 mm
Diameter roda baru : 860 mm
Tinggi lantai kereta dari kepala rel : 1.100 mm
Kecepatan maksimum : 120 km/jam
Badan kereta : monocoque – mild steel
Bogie : Bolsterless – RUK
Alat perangkai : Tight lock coupler
Sistem pengereman : Air brake dengan tread brake
Fasilitas uji : Uji Kenyamanan (ride index)
RAILBUS
Gambar 2.19 Railbus
DATA TEKNIS :
Tahun pembuatan : 2008
Konfigurasi kereta : TEMC+T+TMC
: T 36 penumpang
: TMC 33 penumpang
Kecepatan maksimum : 100 km/jam
Lebar sepur : 1.067 mm
Beban gandar : 14 tons
Panjang total rangkaian : 41.912 mm
Lebar kereta : 3.180 mm
Tinggi seluruh kereta dr atas rel : 3.810 mm Tinggi lantai dari kepala rel : 1.100 mm Jarak antar pusat bogie : 14.000 mm Tinggi pusat alat perangkai dari
atas rel
: 775 +10/-0 mm
Berat kosong : TEMC 22 tons, T 18 tons, TMC 20 tons Carbody : Konstruksi hybrid, konstruksi baja dilas &
komposit yang ringan
Bogie : Motor single Axle & bogie Trailer 2- Axle.
Sistem rem : Air Brake Equipment
Alat perangka : Automatic coupler, tanpa drafgear & rantai pengaman
Lokomotif Diesel Hidraulic (Loko DH)
Gambar 2.20 Lokomotif Diesel Hidraulic DATA TEKNIS :
Lebar sepur : 1.067 mm
Berat Maximum : 84 Ton
Beban gandar : 14 Ton
Traksi Maksimum : 270 kN Panjang Lokomotif : 14.135 mm Lebar lokomotif : 2.642 mm’ Tinggi Lokomotif : 3.575 mm Kecepatan maksimum : 120 km/jam Kapasitas Tangki bahan bakar : 3800 liter
Transmisi : Hydrodinamik
Susunan roda : C-C, Terhubung
Mesin : 45° V-6, 4-stroke cycle,
1700 KW @ 1800 rpm
Komponen Udara : Compressor Type 2 stage, air cooling, Reciprocating
Kapasitas 600 L/mnt
Pengereman : Type pneumatic Clasp brake, high mounted cylinders
Kereta Bagasi
Gambar 2.21 Kereta Bagasi DATA TEKNIS :
Tahun pembuatan : 2008
Kecepatan maksimum : 100 km / jam
Lebar sepur : 1.067 mm
Beban gandar : 14 tons (+5%)
Panjang kereta : 20.920 mm
Lebar kereta : 2.990 mm
Tinggi kereta : 3.810 mm
Badan kereta : Monocoque, Mild steel
Bogie : TB-398
Sistem pengereman : UIC 540, Air brake
Alat perangkai : Automatic coupler, AAR NO. 10A Contour.
Sistem listrik : 380VAC, 3 phase, 50Hz, LBS
Kereta Penolong (NNR)
Gambar 2.22 Kereta Penolong NNR
DATA TEKNIS :
Tahun pembuatan : 2008
Kapasitas muat : 10 ton
Kecepatan maksimum : 100 km / jam
Lebar sepur : 1067 mm
Beban gandar : 14 ton
Lebar kereta : 2.990 mm
Tinggi kereta : 3.810 mm
Jarak antar pusat bogie : 14.000 mm Tinggi pusat alat perangkai dari atas
rel
: 775 +10/-0 mm
Berat kosong : 35 tons
Badan kereta : Monocoque, Mild steel
Bogie : TB-398
Sistem pengereman : UIC 540, Air Brake
Alat perangkai : Automatic coupler, AAR NO. 10A Contour
Sistem listrik : 380VAC, 3 phase, 50Hz, LBS
Bogie TB 398
Gambar 2.23 Bogie TB 398
DATA TEKNIS:
Jarak antar pusat roda : 2.200 mm
Diameter Roda : 774 mm
Jarak antara tumpuan samping : 1.980 mm Berat Bogie Maxs : 4.700 kg Beban gandar maxs : 14 ton
Kecepatan maks. : 100 km/jam
Sistem rem : UIC 540, air brake
2.5 Pengenalan Unit Kerja Teknologi Produksi
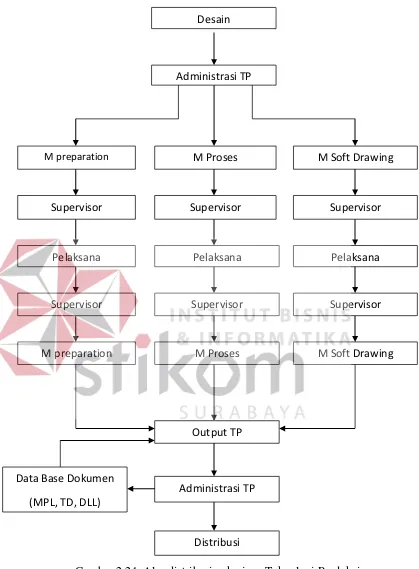
Proses produksi pada PT. INKA (Persero) melalui beberapa proses yang setiap detail prosesnya dipegang oleh setiap divisi. Dalam sistem besar tersebut terdapat divisi PPC yang menangani bagian desain dan juga semua teknologi untuk proses produksi. Dalam divisi PPC terdapat sub divisi lagi yaitu Teknologi Produksi. Dalam teknologi produksi ini mempunyai pekerjaan utama untuk membuat manufacturing drawing pada divisi produksi yang akan menjadi dasar pembuatan berbagai komponen atau part. Selain itu juga mempunyai pekerjaan untuk merancang jig yang dibutuhkan oleh divisi produksi.
Gambar 2.24 Alur distribusi pekerjaan Teknologi Produksi
Pada gambar 2.24 diatas menjelaskan tentang alur proses penerimaan dokumen desain dari teknologi desain kepada teknologi produksi.
Administrasi TP
M Proses
M preparation M Soft Drawing
Supervisor Supervisor Supervisor
Pelaksana Pelaksana Pelaksana
Supervisor Supervisor Supervisor
M preparation M Proses M Soft Drawing
Output TP
Administrasi TP
Distribusi Data Base Dokumen
(MPL, TD, DLL)
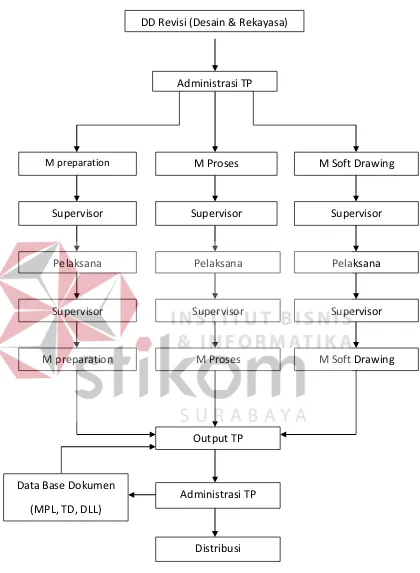
Gambar 2.25 Alur penerimaan dan pengiriman dokumen revisi Pada Gambar 2.25 menjelaskan tentang alur proses revisi pengerjaan dari Alur distribusi pekerjaan Teknologi Produksi.
DD Revisi (Desain & Rekayasa)
Administrasi TP
M Proses
M preparation M Soft Drawing
Supervisor Supervisor Supervisor
Pelaksana Pelaksana Pelaksana
Supervisor Supervisor Supervisor
M preparation M Proses M Soft Drawing
Output TP
Administrasi TP
Distribusi Data Base Dokumen
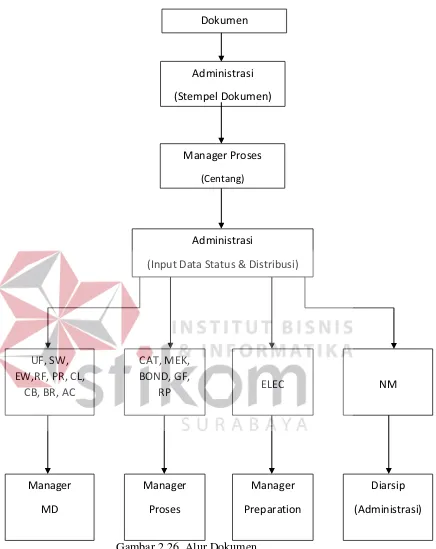
Gambar 2.26 Alur Dokumen
Pada gambar 2.26 merupakan bagian Teknologi Produksi akan bekerjasama dengan divisi Produksi yang berada di lapangan untuk memenuhi kebutuhan/komponen dari pembuatan produk serta mengawal dan mengawasi di lapangan jika terdapat masalah.
(Input Data Status & Distribusi)
BAB III
LANDASAN TEORI
Landasan merupakan dasar – dasar yang digunakan dalam pembuatan kerja praktik ini. Sebagai langkah awal dalam menyusun laporan kerja praktik perlu dipahami terlebih dahulu mengenai konsep dasar pengembangan temporary bogie yang memanfaatkan teknologi smart control.
3.1 BOGIE
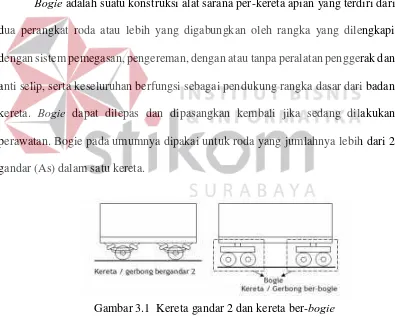
Bogie adalah suatu konstruksi alat sarana per-kereta apian yang terdiri dari
dua perangkat roda atau lebih yang digabungkan oleh rangka yang dilengkapi dengan sistem pemegasan, pengereman, dengan atau tanpa peralatan penggerak dan anti selip, serta keseluruhan berfungsi sebagai pendukung rangka dasar dari badan kereta. Bogie dapat dilepas dan dipasangkan kembali jika sedang dilakukan perawatan. Bogie pada umumnya dipakai untuk roda yang jumlahnya lebih dari 2 gandar (As) dalam satu kereta.
Gambar 3.1 Kereta gandar 2 dan kereta ber-bogie
yang membelok atau menikung, maka akan terjadi sudut antara garis lurus badan kereta dengan rel. Pada keadaan ini, akan terjadi kontak antara flens dengan rel pada salah satu sisi rodanya. Pada kereta tanpa bogie maka sudut ini terbatas karena roda akan selalu segaris dengan badan kereta sehingga saat flens sudah tidak bisa menahan rel, maka roda akan naik ke atas rel dan akhirnya terjadi derailment atau anjlok. Dengan adanya bogie, maka roda tidak segaris dengan badan kereta melainkan mempunyai sudut tertentu yang memungkinkan roda bisa membelok mengikuti rel tanpa terjadi anjlok atau roda yang naik ke atas rel.
Gambar 3.2 Bogie Steering , atas : tanpa bogie, bawah : dengan bogie ( sumber
http://the-contact-patch.com/book/rail/r1114-railway-suspension )
Selain fleksibilitas, bogie juga dapat meredam efek yang diakibatkan oleh rel yang bergelombang naik turun. Titik tengah bogie yang disebut “Center Pivot” akan membagi defleksi yang terjadi diantara 2 rodanya. Hal ini akan menyebabkan kereta lebih stabil walau rel tidak rata / bergelombang naik turun.
Gambar 3.3 Peredaman ketidak rataan rel oleh bogie ( sumber
http://the-contact-patch.com/book/rail/r1114-railway-suspension )
Gambar 3.3 Merupakan Peredaman ketidak rataan rel oleh bogie yang masuk dalam perhitungan jarak antar roda dan jarak ketidak rataan rel. Selain fleksibilitas, bogie juga dapat meredam efek yang diakibatkan oleh rel yang bergelombang naik turun. Titik tengah bogie yang disebut “Center Pivot” akan membagi defleksi yang terjadi diantara 2 rodanya. Hal ini akan menyebabkan kereta lebih stabil walau rel tidak rata / bergelombang naik turun.
3.2 TEMPORARY BOGIE
Temporary Bogie merupakan bentuk dari sebuah bogie biasa, hanya saja temporary bogie dibuat untuk sementara saja dalam artian berguna untuk menopang
atau membawa bahan material seperti plat besi, roda kereta, frame kereta dll. Pada dasarnya temporary bogie hanya berbentuk frame body sederhana dengan penopang, axle box dan 2 pasang roda. Di PT. INKA sendiri temporary bogie digunakan untuk memindahkan badan gerbong antar workshop.
Gambar 3.4 Temporary bogie
Gambar 3.4 Merupakan contoh Temporary bogie yang dipakai untuk mengangkat bahan atau material yang berat.
3.3 SMART CONTROL 3.3.1 Arduino
Gambar 3.5 Salah satu jenis microcontroller yaitu Arduino. Arduino adalah pengendali mikro single-board yang bersifat open-source, diturunkan dari Wiring platform, dirancang untuk memudahkan penggunaan elektronik dalam berbagai
bidang. Hardwarenya memiliki prosesor Atmel AVR dan softwarenya memiliki bahasa pemrograman sendiri.
Arduino juga merupakan platform hardware terbuka yang ditujukan kepada siapa saja yang ingin membuat purwarupa peralatan elektronik interaktif berdasarkan hardware dan software yang fleksibel dan mudah digunakan. Mikrokontroler diprogram menggunakan bahasa pemrograman arduino yang memiliki kemiripan syntax dengan bahasa pemrograman C. Karena sifatnya yang terbuka maka siapa saja dapat mengunduh skema hardware arduino dan membangunnya.
Arduino menggunakan keluarga mikrokontroler ATMega yang dirilis oleh Atmel sebagai basis, namun ada individu/perusahaan yang membuat clone arduino dengan menggunakan mikrokontroler lain dan tetap kompatibel dengan arduino pada level hardware. Untuk fleksibilitas, program dimasukkan melalui bootloader meskipun ada opsi untuk mem-bypass bootloader dan menggunakan downloader untuk memprogram microcontroller secara langsung melalui port ISP.
Arduino Uno
14 pin I/O digital dan 6 pin input analog. Untuk pemograman cukup menggunakan koneksi USB type A to To type B. Sama seperti yang digunakan pada USB printer.
3.3.2 Remote Wireless
Gambar 3.6 Remote Controller Wireless
Gambar 3.6 merupakan Controller atau Remot Kontrol yang dipakai user untuk mengendalikan pergerakan Smart Temporary Bogie. Controller ini menggunakan Analog stick Wireless SONY yang sudah satu paket dengan Receivernya. Dengan menghubungkan Receiver ke Arduino maka Controller Wireles ini bisa digunakan.
3.3.3 Motor 3 Phase
Gambar 3.7 Motor induksi 3 fasa
motor induksi yaitu memiliki beberapa karakteristik parameter yang tidak linier, terutama resistansi rotor yang memiliki nilai yang bervariasi untuk kondisi operasi yang berbeda, sehingga tidak dapat mempertahankan kecepatannya secara konstan bila terjadi perubahan beban. Oleh karena itu untuk mendapatkan kecepatan yang konstan dan peformansi sistem yang lebih baik terhadap perubahan beban dibutuhkan suatu pengontrol Motor induksi 3 fasa adalah alat penggerak yang paling banyak digunakan dalam dunia industri. Hal ini dikarenakan motor induksi mempunyai konstruksi yang sederhana, kokoh, harganya relatif murah, serta perawatannya yang mudah, sehingga motor induksi mulai menggeser penggunaan motor DC pada industri. Motor induksi memiliki beberapa parameter yang bersifat non-linier, terutama resistansi rotor, yang memiliki nilai bervariasi untuk kondisi operasi yang berbeda. Hal ini yang menyebabkan pengaturan pada motor induksi lebih rumit dibandingkan dengan motor DC. Salah satu kelemahan dari motor induksi adalah tidak mampu mempertahankan kecepatannya dengan konstan bila terjadi perubahan beban. Apabila terjadi perubahan beban maka kecepatan motor induksi akan menurun. Untuk mendapatkan kecepatan konstan serta memperbaiki kinerja motor induksi terhadap perubahan beban, maka dibutuhkan suatu pengontrol. Penggunaan motor induksi tiga fasa di beberapa industri membutuhkan performansi yang tinggi dari motor induksi untuk dapat mempertahankan kecepatannya walaupun terjadi perubahan beban.
(rotating magnetic field) yang dihasilkan oleh arus stator. Belitan stator yang dihubungkan dengan suatu sumber tegangan tiga fasa akan menghasilkan medan magnet yang berputar dengan kecepatan sinkron (ns = 120f/2p). Medan putar pada stator tersebut akan memotong konduktor-konduktor pada rotor, sehingga terinduksi arus; dan sesuai dengan Hukum Lentz, rotor pun akan ikut berputar mengikuti medan putar stator. Perbedaan putaran relative antara stator dan rotor disebut slip. Bertambahnya beban, akan memperbesar kopel motor, yang oleh karenanya akan memperbesar pula arus induksi pada rotor, sehingga slip antara medan putar stator dan putaran rotor pun akan bertambah besar. Jadi, bila beban motor bertambah, putaran rotor cenderung menurun. Dikenal dua tipe motor induksi yaitu motor induksi dengan rotor belitan dan rotor sangkar.
3.3.4 Inverter
Gambar 3.8 Inverter Toshiba
mengubah tegangan AC menjadi tegangan DC kemudian dijadikan tegangan AC lagi dengan frekuensi yang berbeda atau dapat diatur.
Untuk mengubah tegangan AC menjadi DC dibutuhkan penyearah (converter AC-DC) dan biasanya menggunakan penyearah tidak terkendali (rectifier dioda) namun juga ada yang menggunakan penyearah terkendali (thyristor rectifier). Setelah tegangan sudah diubah menjadi DC maka diperlukan perbaikan kualitas tegangan DC dengan menggunakan tandon kapasitor sebagai perata tegangan. Kemudian tegangan DC diubah menjadi tegangan AC kembali oleh inverter dengan teknik PWM (Pulse Width Modulation). Dengan teknik PWM ini bisa didapatkan amplitudo dan frekuensi keluaran yang diinginkan. Selain itu teknik PWM juga menghasilkan harmonisa yang jauh lebih kecil dari pada teknik yang lain serta menghasilkan gelombang sinusoidal, dimana kita tahu kalau harmonisa ini akan menimbulkan rugi-rugi pada motor yaitu cepat panas. Maka dari itu teknik PWM inilah yang biasanya dipakai dalam mengubah tegangan DC menjadi AC (Inverter).
3.4 Power Supply
3.4.1 LiPo (Lithium Polimer)
Gambar 3.9 Battery Lithium Polimer
Gambar 3.9 adalah Battery LiPo yang tidak menggunakan cairan sebagai elektrolit melainkan menggunakan elektrolit polimer kering yang berbentuk seperti lapisan plastik film tipis. Lapisan film ini disusun berlapis-lapis diantara anoda dan katoda yang mengakibatkan pertukaran ion. Dengan metode ini baterai LiPo dapat dibuat dalam berbagai bentuk dan ukuran
Pada setiap paket baterai LiPo selain tegangan ada label yang disimbolkan
dengan “S”. Disini “S” berarti sel yang dimiliki sebuah paket baterai (battery pack).
Sementara bilangan yang berada didepan simbol menandakan jumlah sel dan biasanya berkisar antar 2-6S (meskipun kadang ada yang mencapai 10S). Berikut adalah beberapa contoh notasi baterai LiPo.
22.2 volt battery = 6 cells x 3.7 volts (6S)
Discharge rate biasa disimbolkan dengan “C” merupakan notasi yang
menyatakan sebarapa cepat sebuah baterai untuk dapat dikosongkan (discharge) secara aman. Sesuai dengan penjelasan diatas bahwa energi listrik pada baterai LiPo berasal dari pertukaran ion dari anoda ke katoda. Semakin cepat pertukaran ion yang dapat terjadi maka berarti semakin nilai dari “”C”. Sebuah baterai dengan discharge rate 10C berarti baterai tersebut dapat di discharge 10 kali dari kapasitas beterai sebenarnya. begitu juga 15C berarti 15 kali, dan 20C berarti 20 kali. Mari gunakan contoh baterai 1000 mAh diatas sebagai contoh. Jika baterai tersebut memiliki rating 10C maka berarti baterai tersebut dapat menahan beban maksimum hingga 10.000 miliampere atau 10 Ampere. (10 x 1000 miliampere = 10 Ampere). Angka ini berarti sama dengan 166 mA per menit, maka energi baterai 1000 mAh akan habis dalam 6 menit. Angka ini berasal dihitung dengan mengkalkulasi jumlah arus per menitnya. 1000 mAh dibagi 60 menit = 16,6 mA per menit. Lalu kemudian kalikan 16,6 dengan C rating (dalam hal ini 10) = 166 mA beban per menit. Lalu bagi 1000 dengan 166 = 6,02 menit.
3.4.2 Accu
Gambar 3.10 Aki 150 Ampere
Gambar 3.10 adalah sumber Aki sebagai battery untuk mensupply daya pada motor 3 fasa yang berfungsi sebagai penggerak bogie. Karena aki bersifat DC maka power supply dari aki di lewatkan inverter ke AC agar motor dapat bergerak semestinya.
3.4.3 Electric Hydraulic
Gambar 3.11 Silinder hidrolik adalah sebuah aktuator mekanik yang menghasilkan gaya searah melalui gerakan stroke yang searah. Alat ini menjadi salah satu bagian dari sistem hidrolik selain pompa dan motor hidrolik. Jika motor hidrolik mengubah tekanan fluida hidrolik menjadi gerakan putar, maka silinder hidrolik menghasilkan gerakan stroke yang searah.
BAB V
PENUTUP
Pada bab ini akan dibahas mengenai kesimpulan dan saran dari pembuatan simulasi Smart Temporary Bogie pada PT. INKA (Persero).
5.1Kesimpulan
1. Sistem kontrol Smart Temporary Bogie dirancang dengan memperhatikan desain terlebih dahulu kemudian menempatkan alat penunjang utama yang kemudian dilanjutkan dengan controller software sebagai driver dari semua hardware yang dikontrol oleh
Microcontroller Arduino sehingga alat yang dibuat dapat bekerja dengan sinkron.
2. Terdapat beberapa manfaat penggunaan Smart Temporary Bogie yaitu hemat biaya pengeluaran operasional, Mepercepat proses produksi, tidak memerlukan banayak operator, tidak memerlukan operator dengan keahlian khusus, tidak memerlukan ruang penyimpanan yang besar, biaya perawatan lebih mudah dan murah serta ramah lingkungan.
5.2 Saran
1. Terdapat Standar Operasional untuk pengangkutan material tertentu. 2. Sebaiknya temporary bogie yang digunakan lebih dirawat lagi dan ditempatkan pada penyimpanan tertentu agar tetap awet tidak termakan oleh faktor lingkungan.
4. Pengangkutan material lebih diperhatikan lagi dengan jumlah material yang diangkut dan memberikan tata peletakan atau penyimpanan material dengan tempat yang tepat.
5. Ketika melakukan proses pemindahan material menggunakan Smart Temporary Bogie, sebaiknya terlebih dahulu jalur untuk temporary
bogie di bersihkan dulu dan bersifat clear area agar pemindahan
71
Josef Kolar Transactions on Electrical Engineering, Vol. 4 (2015), No. 1. Design of
a Wheelset Drive. Czech Technical University in Prague/Department of
Automotive, Combustion Engine and Railway Engineering, Prague, Czech Republic.
Arwindra Rizqiawan (2010), Kereta Rel Listrik. URL : https://konversi.wordpress.com/2010/04/23/kereta-rel-listrik/. ( Diakses tanggal 2 Februari 2016).
Suyamto, (2009). ANALISIS DAYA DAN TORSI PADA MOTOR INDUKSI. SDM TEKNOLOGI NUKLIR YOGYAKARTA.