RANCANG BANGUN SISTEM KENDALI KONSENTRASI LARUTAN
HIDROPONIK BERBASIS PID
MADE EKALAYA PRATHISTHAYA
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM
FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR
BOGOR
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa skripsi berjudul Rancang Bangun Sistem Kendali Konsentrasi Larutan Hidroponik Berbasis PID adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi manapun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
ABSTRAK
MADE EKALAYA PRATHISTHAYA. Rancang Bangun Sistem Kendali Konsentrasi Larutan Hidroponik Berbasis PID. Dibimbing oleh LIYANTONO dan MOHAMAD SOLAHUDIN.
Konsentrasi larutan nutrisi pada kegiatan budidaya tanaman hidroponik perlu dikendalikan agar sesuai dengan kebutuhan nutrisi tanaman. Tujuan penelitian ini adalah merancang bangun sistem kendali konsentrasi larutan nutrisi menggunakan sensor EC, dengan menggunakan metode PID. Penelitian ini dilakukan dalam 4 tahap; kalibrasi sensor EC, simulasi penurunan konsentrasi larutan nutrisi karena proses evapotranspirasi, penentuan parameter kendali PID (Kp, Ki, Kd) secara trial & error, dan simulasi pengendalian EC dari larutan nutrisi. Hasil validasi pada tahap 2 sudah memuaskan yang diindikasikan oleh nilai RMSE sebesar 0.025 gram dengan nilai R2 sebesar 0.973. Kemudian setelah dilakukan trial & error pada penentuan parameter Kp, Ki, Kd diperoleh nilai berturut-turut 5, 5000, 200, dengan nilai toleransi ±6 %. Nilai tersebut adalah nilai yang paling optimal dengan nilai settling time 7.345 menit dan steady state error 0.025 dS/m. Hasil simulasi pengendalian EC terukur dari larutan nutrisi didapat nilai RMSE sebesar 0.025 dS/m dan nilai RMSE dari bobot nitrogen 0.012 gram. Oleh karena itu, dapat dikatakan sistem kendali PID ini sesuai dengan yang diharapkan.
Kata kunci: EC, sistem kendali, PID (Proportional-Integral-Derivative)
ABSTRACT
MADE EKALAYA PRATHISTHAYA. Design of Concentration Control System for Hydroponic Solution Based on PID. Supervised by LIYANTONO and MOHAMAD SOLAHUDIN.
Nutrient solution concentration in hydroponic crop cultivation need to be controlled to make it appropriate to the plant nutrient requirement. The purpose of this research is to design control system for nutrient solution concentrations using EC sensor, by using a PID method. This research was conducted in 4 stages; EC sensor calibration, simulation of decrease nutrient solution concentration caused by evapotranspiration process, determination of PID control parameter (Kp, Ki, Kd) with trial & error, and simulation of EC control of nutrient solution. Validation result of second stage was satisfied indicated by RMSE value at 0.025 grams with R2 value at 0.973. Then after conducted trial & error in determination of Kp, Ki, Kd obtained respectively 5, 5000, 200, with tolerance value ±6 %. Those value are the most optimal which is identified from settling time was 7.345 minute and steady state error was 0.025 dS/m. Simulation result of EC control of nutrient solution obtained RMSE value 0.023 dS/m and RMSE value from nitrogen mean weight 0.012 grams. Therefore, can be said this PID control system is in accordance with which expected.
Skripsi
Sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik
dari Departemen Teknik Mesin dan Biosistem pada Fakultas Teknologi Pertanian
RANCANG BANGUN SISTEM KENDALI KONSENTRASI LARUTAN
HIDROPONIK BERBASIS PID
MADE EKALAYA PRATHISTHAYA
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR BOGOR
Judul Skripsi : Rancang Bangun Sistem Kendali Konsentrasi Larutan Hidroponik Berbasis PID
Nama : Made Ekalaya Prathisthaya NIM : F14100072
Disetujui oleh
Dr Liyantono, MAgr Pembimbing I
Dr Ir Mohamad Solahudin, MSi Pembimbing II
Diketahui oleh
Dr Ir Desrial, MEng Ketua Departemen
PRAKATA
Puji dan syukur penulis panjatkan kepada Tuhan yang Maha Esa atas segala karunia-Nya sehingga karya ilmiah ini berhasil diselesaikan. Judul yang dipilih dalam penelitian yang dilaksanakan sejak bulan Mei 2014 ini yaitu Rancang Bangun Sistem Kendali Konsentrasi Larutan Hidroponik Berbasis PID. Penelitian ini berlangsung selama 5 bulan dikarenakan proses pengadaan alat yang cukup memakan waktu.
Terima kasih penulis ucapkan kepada:
1. Tuhan Yang Maha Esa atas anugrah dan karunianya.
2. Dr Liyantono dan Dr Mohamad Solahudin selaku pembimbing. 3. Dr Slamet Widodo yang telah banyak memberi saran dan solusi.
4. Bapak (Putu Asiagama), Ibu (Ni Made Sri Seputri), Kakak (I Putu Arya Yasa Saputra) dan Kakak ipar (Ni Luh Ketut Ayu Budiani) yang telah mencurahkan kasih sayangnya dalam bentuk apapun.
5. Alfin Fathikunada yang telah banyak memberikan ilmunya.
6. Siti Asiyah yang telah mengoreksi dan memberikan masukan terhadap skripsi ini.
7. Erlin Cahya Rizki Purnama, Dian Andriani, Amri Maulana, Naufal Rauf, dan teman-teman Laboratorium Teknik Bioinformatika.
8. I Kadek Agus Hendra Dinata, I Nengah Dedi Setiadi, I Gde Wahyu Dani Darmawan, Nyoman Riyawan dan teman-teman KMHD.
9. Bapak Ahmad, Ibu Mar, Bapak Dharma serta semua staf Departmen Teknik Mesin dan Biosistem
10. Rizky Wiradinata dan teman-teman Antares (TMB 47) atas bantuannya selama penelitian dan penulisan skripsi ini dilaksanakan.
11. Penghuni Vrindavan yang telah memberikan bantuan dalam bentuk apapun. Semoga karya ilmiah ini bermanfaat.
DAFTAR ISI
PRAKATA vii
DAFTAR TABEL x
DAFTAR GAMBAR x
DAFTAR LAMPIRAN xi
PENDAHULUAN 1
Latar Belakang 1
Tujuan Penelitian 2
Ruang Lingkup Penelitian 2
TINJAUAN PUSTAKA 3
Electrical Conductivity (EC) 3
Sistem Kendali Proportional-Integral-Derivative (PID) 4
Proses Penyerapan Nutrisi pada Tanaman Tomat 6
METODOLOGI 6
Tempat dan Waktu Penelitian 6
Alat dan Bahan 6
Prosedur Penelitian 7
Kalibrasi sensor EC 7
Interpolasi linier 7
Simulasi penurunan konsentrasi larutan nutrisi karena proses
evapotranspirasi 7
Validasi data 8
Penentuan parameter kendali PID (Kp, Ki, Kd) secara trial & error 8
Simulasi pengendalian EC dari larutan nutrisi 9
HASIL DAN PEMBAHASAN 11
Kalibrasi Sensor EC 11
Simulasi Penurunan Konsentrasi Larutan Nutrisi Karena Proses
Evapotranspirasi 13
Penentuan Parameter Kendali PID (Kp, Ki, Kd) Secara Trial & Error 16
Simulasi Pengendalian EC dari Larutan Nutrisi 20
SARAN 22
DAFTAR PUSTAKA 22
LAMPIRAN 24
RIWAYAT HIDUP 31
DAFTAR TABEL
1 Nilai EC untuk beberapa jenis tanaman 3
2 Data EC acuan dan EC meter CM-21P 11
3 Data pengukuran EC di dalam 1 liter air yang dilakukan menggunakan
sensor EC CS200 dan EC meter CM-21P 12
4 Data EC terukur dengan bobot nitrogen di dalam 5 liter air 14 5 Nilai settling time dan steady state error untuk tiap nilai target 19
6 Data pencarian debit tetesan infus 27
7 Data penurunan bobot nitrogen referensi dan hasil simulasi 28 8 Kandungan nutrisi yang terdapat di dalam total padatan AB mix 30
DAFTAR GAMBAR
1 Hubungan dari tiap unsur siklus kendali PID 5
2 Diagram alir pengendalian EC larutan nutrisi 9
3 Tahapan prosedur penelitian 10
4 Grafik hubungan antara data pengukuran EC meter CM-21P terhadap
nilai EC acuan 11
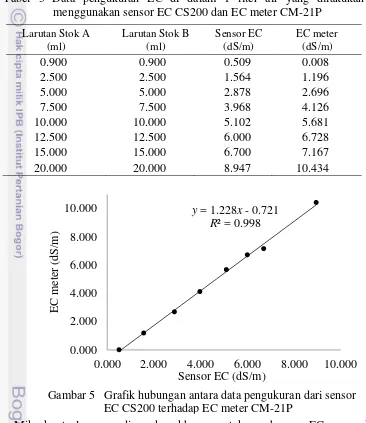
5 Grafik hubungan antara data pengukuran dari sensor EC CS200
terhadap EC meter CM-21P 12
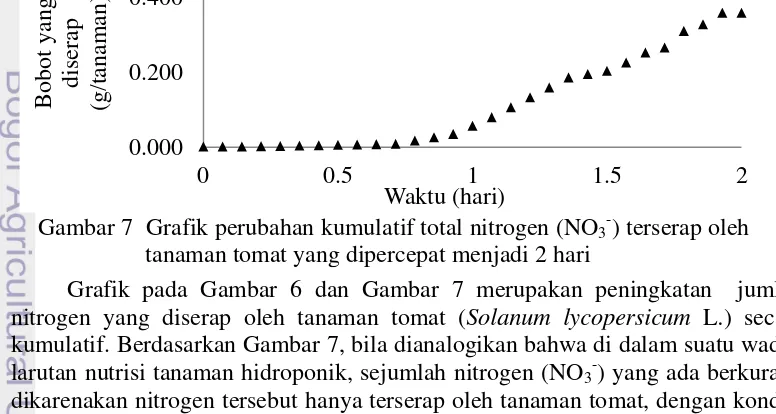
6 Grafik peningkatan kumulatif total nitrogen (NO3-) terserap oleh tanaman tomat (Solanum lycopersicum L.) (Rincon et. al 2005) 13 7 Grafik perubahan kumulatif total nitrogen (NO3-) terserap oleh tanaman
tomat yang dipercepat menjadi 2 hari 13
8 Grafik analogi penurunan kumulatif bobot nitrogen (NO3-) terserap di
wadah larutan nutrisi 14
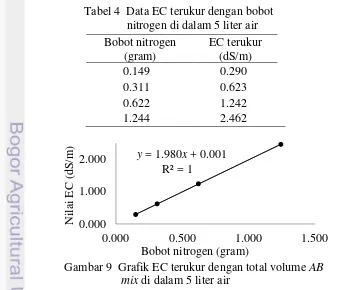
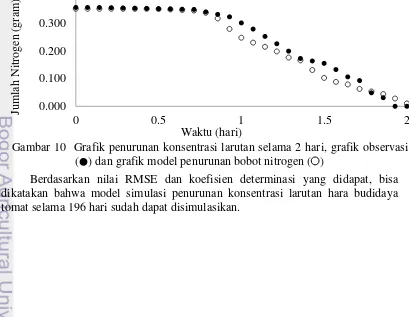
9 Grafik EC terukur dengan total volume AB mix di dalam 5 liter air 14 10 Grafik penurunan konsentrasi larutan selama 2 hari, grafik observasi
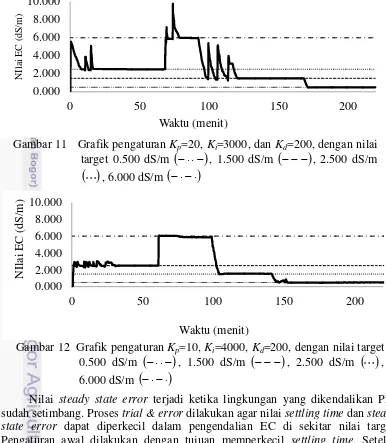
( ) dan grafik model penurunan bobot nitrogen ( ) 15 11 Grafik pengaturan Kp=20, Ki=3000, dan Kd= 200, dengan nilai target
0.500 dS/m
, 1.500 dS/m
, 2.500 dS/m
, 6.000 dS/m
1612 Grafik pengaturan Kp=10, Ki=4000, Kd=200, dengan nilai target 0.500 dS/m
, 1.500 dS/m
, 2.500 dS/m
, 6.000 dS/m13 Grafik pengaturan Kp=5, Ki=5000, Kd=200, dengan nilai target 0.500 dS/m
, 1.500 dS/m
, 2.500 dS/m
, 6.000 dS/m
17 14 Grafik pengaturan Kp=3, Ki=5000, Kd=200, dengan nilai target 0.500dS/m
, 1.500 dS/m
, 2.500 dS/m
, 6.000 dS/m
18 15 Grafik pengaturan Kp=5, Ki=5000, Kd=200, dengan nilai target 0.500dS/m
, 1.500 dS/m
, 2.500 dS/m
, 6.000 dS/m
(nilai toleransi ±6 %) 1816 Grafik simulasi sistem kendali EC yang dilakukan selama 2 hari dengan
nilai target 0.710 dS/m
2017 Grafik simulasi bobot nitrogen () yang dibandingkan dengan model penurunan konsentrasi larutan nutrisi karena proses evapotranspirasi
() 20
18 Perubahan berdasarkan waktu untuk nutrisi yang disuplai ( ), dibuang ( ), dan diserap oleh tanaman tomat ( ) (Rincon et al. 2005) 26 19 Pembagian pola perubahan jumlah nitrogen terserap 27
20 Kemasan pupuk hidroponik AB mix 30
DAFTAR LAMPIRAN
1 Algoritma dari program sistem kendali PID 24
2 Contoh perhitungan untuk pencarian pola penurunan bobot nitrogen 26 3 Contoh perhitungan untuk validasi menggunakan Root Mean Square
Error (RMSE) 28
PENDAHULUAN
Latar Belakang
Hidroponik adalah pembudidayaan tanaman tanpa menggunakan tanah dimana teknik ini memanfaatkan pertumbuhan akar tanaman di dalam larutan nutrisi dengan kandungan nutrisi sesuai dengan kebutuhan mineral tanaman tersebut (Considine 1976). Berdasarkan pernyataan tersebut kita dapat menangkap bahwa hidroponik merupakan kegiatan bercocok tanam dengan pembudidayaan tanaman tanpa menggunakan media tanah, melainkan di dalam larutan nutrisi. Pada umumnya kegiatan bercocok tanam secara hidroponik dilakukan di dalam rumah tanaman agar kondisi lingkungan tanaman dapat dikendalikan. Bercocok tanam di dalam rumah tanaman mempunyai beberapa kelebihan dibandingkan bercocok tanam di lahan terbuka. Kelebihan tersebut antara lain penggunaan pestisida yang lebih sedikit karena tanaman lebih terlindungi dari serangan hama. Penggunaan rumah tanaman juga memungkinkan pengaturan pasokan air lebih efisien dan teratur sesuai dengan kebutuhannya. Tanaman di musim hujan terlindung dari curah hujan yang berlebihan. Pemberian nutrisi dapat lebih mudah dalam sistem hidroponik, yaitu bersama air dalam bentuk larutan nutrisi (Suhardiyanto 2009). Nilai daya hantar listrik (electrical conductivity) digunakan sebagai pendekatan untuk menentukan konsentrasi melalui konduktivitas listrik dari larutan (Hanan 1998). Nilai target electrical conductivity dari larutan nutrisi bervariasi tergantung pada jenis tanaman, tahap pertumbuhan dan kondisi iklim lingkungan (Parks dan Murray 2011). Kebutuhan nutrisi tanaman adalah jumlah nutrisi yang dibutuhkan oleh tanaman untuk bertahan dan reproduksi. Semakin besar jumlah unsur yang terlarut dalam larutan nutrisi, maka nilai EC yang terukur juga akan meningkat secara linier (Hanan 1998). Akan lebih baik pengendalian nilai EC dilakukan secara berkala, sehingga nilai EC larutan selalu terjaga optimal. Untuk mengoptimalkan pertumbuhan dan kualitas dari tanaman, diperlukan penyesuaian antara pasokan air dan pupuk yang dibutuhkan oleh tanaman dalam jangka waktu yang pendek (Jaimes-Ponce et al. 2012). Seiring perubahan waktu konsentrasi dari larutan nutrisi dapat berubah. Dibutuhkan suatu perlakuan untuk selalu menjaga konsentrasi larutan nutrisi tersebut optimal. Berdasarkan hal tersebut, dalam penelitian ini dirancang suatu rancang bangun sistem kendali yang dapat mengendalikan konsentrasi larutan sebagai perlakuan untuk menjaga konsentrasi larutan nutrisi hidroponik.
2
kendali PID. Sistem kendali tertutup adalah sistem kendali yang menggunakan informasi dari alat ukur dan diumpankan kembali dari keluaran sistem untuk memodifikasi masukannya (Bolton 2004). Pada sistem PID, secara garis besar kendali proporsional digunakan untuk mengurangi galat secara proporsional berdasarkan nilai terukur. Kendali integral mengakumulasi galat yang telah berjalan, sehingga menggiring nilai galat secara perlahan menuju nilai nol. Kendali derivatif digunakan sebagai laju perubahan galat dimana kondisi ini berfungsi sebagai antisipasi nilai galat di waktu selanjutnya, mempercepat respon kendali proporsional dan meningkatkan stabilitas dengan mengompensasi jeda yang ditimbulkan dari kendali integral (Neary 2004). Kombinasi dari ketiga kendali tersebut dapat menyajikan sistem kendali yang sangat akurat dan stabil. Akan tetapi, sistem kendali harus terlebih dahulu dilakukan pengaturan untuk karakteristik sistem yang optimum (Neary 2004).
Sistem kendali PID sangat berguna untuk kondisi yang mengharapkan sistem memiliki respon cepat terhadap perubahan lingkungan dan sistem kendali PID sangat berguna untuk pembebanan yang berlanjut terus (Neary 2004). Menurut Shaw (2003), ada banyak algoritma yang bisa digunakan untuk mengendalikan proses menggunakan metode PID. Salah satu yang paling mudah, paling banyak digunakan di industri dan rumah tangga adalah sistem saklar on/off. Maka dari itu, sistem kendali PID yang digunakan dalam penelitian ini menggunakan sistem saklar on/off.
Tujuan Penelitian
Penelitian ini secara umum bertujuan untuk merancang bangun sistem kendali konsentrasi larutan nutrisi dengan EC sebagai parameter, berbasis metode Proportional-Integral-Derivative (PID). Tujuan tersebut dicapai dengan dilakukan:
1. Simulasi pola penurunan konsentrasi larutan nutrisi hidroponik karena proses evapotranspirasi.
2. Penentuan parameter kendali PID (Kp, Ki, Kd).
3. Simulasi pengendalian EC dari larutan nutrisi menggunakan parameter kendali PID yang sudah ditentukan.
Ruang Lingkup Penelitian
`
3
TINJAUAN PUSTAKA
Electrical Conductivity (EC)
Nilai daya hantar listrik atau dengan istilah lain electrical conductivity dan dapat disingkat menjadi EC, adalah ukuran total konsentrasi atau ukuran kepekatan yang terdapat pada suatu larutan nutrisi. Semakin besar konsentrasi larutan nutrisi, maka nilai EC akan semakin besar (Parks dan Murray 2011). Nilai EC diukur dengan satuan desi siemens per meter (dS/m). Nilai EC dapat dikonversi ke satuan μS/cm (mikro siemens per centimeter) dari satuan dS/m dengan nilai EC terukur dikalikan dengan nilai 103. Umumnya penggunaan satuan desi siemens per meter (dS/m) biasa digunakan pada literatur ilmiah (Whipker dan Cavins 2000).
Nilai EC pada tiap jenis tanaman berbeda-beda. Nilai EC optimum tomat (Solanum lycopersicum L.) berkisar antara 3.000 dS/m untuk fase vegetatif dan 4.500 dS/m sampai 7.000 dS/m untuk fase generatif (Rincon et al. 2005). Nilai EC untuk beberapa macam tanaman hidroponik dapat dilihat pada Tabel 1.
Konsentrasi larutan dengan EC yang rendah atau terlalu tinggi akan memberikan hasil panen yang rendah. Hasil panen akan meningkat jika tercapai EC optimum (Wu dan Kubota 2008). Peningkatan konsentrasi dari larutan yang dijadikan nutrisi disebabkan karena penambahan pupuk cair. Ada pula konsentrasi meningkat karena efek dari akumulasi garam yang terdapat di dalam pupuk cair hidroponik (Massa et al. 2011). Menurut Hanan (1998) penentuan nilai EC merupakan metode paling mudah untuk menguji kepekatan larutan pada sistem hidroponik. Pembacaan EC menyediakan informasi tentang tingkat substrat terlarut dan salinitas dari larutan nutrisi, walaupun pada umumnya salinitas ditentukan dari nilai total padatan terlarut (TDS) (Hanan 1998).
Berdasarkan penelitian yang dilakukan oleh Wu dan Kubota (2008) pada tanaman tomat, laju pertukaran gas pada daun dan laju fotosintesis dipengaruhi nilai daya hantar listrik dari suatu larutan nutrisi. Peningkatan nilai EC yang melampaui nilai optimumnya pada larutan nutrisi untuk tanaman tomat pada masa vegetatif akan memberi dampak penurunan laju transpirasi dan laju fotosintesis.
Tabel 1 Nilai EC untuk beberapa jenis tanaman
Jenis tanaman Nilai EC (dS/m)
Vegetatif Generatif Tomat (Solanum lycopersicum L.) 3.000 4.500-7.000 Pok choi (Brasica rapa L.) 1.330-1.300 -
Selada (L. Sativa) 1.560-1.740 -
Kentang (Solanum tuberosum L.) 2.000 5.800
Sumber: Rincon et al. (2008), Sesmininggar (2006), Setiawan (2007), Novella et al.
4
Sistem Kendali Proportional-Integral-Derivative (PID)
Sistem kendali yang terdiri dari tiga tipe sistem pengendalian, dimana kecenderungan terjadinya galat kondisi setimbang (steady state error) parameter kendali dan terjadinya osilasi dapat direduksi disebut sistem kendali Proportional-Integral-Derivative (PID) (Bolton 2004). Menurut Shaw (2003), sistem kendali PID dapat bekerja dikarenakan oleh siklus kendali (control loop). Siklus kendali tersebut terdiri dari beberapa bagian yaitu pengukuran variabel proses, algoritma kendali, unsur akhir kendali dan proses. Pengukuran variabel proses adalah variabel yang terukur oleh instrumen atau alat ukur dalam bentuk sinyal. Beberapa kasus dalam penggunaan sensor, sinyal bisa dalam bentuk tegangan atau kapasitansi. Sinyal tersebut lalu dirubah ke dalam bentuk sinyal lain agar bisa diolah oleh sistem kendali. Tahapan berikutnya adalah algoritma kendali, dimana pada tahapan algoritma kendali, sistem kendali mengeksekusi data terusan dari sensor dalam beberapa periode waktu (cenderung tiap detik atau lebih cepat) untuk menghasilkan sinyal keluaran yang nantinya ditransmisikan ke unsur akhir pengendalian. Sinyal keluaran yang ditransmisikan dari sistem kendali, akan digunakan sebagai indikator aksi pengendalian oleh unsur akhir kendali. Selama itu, unsur akhir kendali (motor listrik, katup, peredam aliran udara, dan peranti lainnya) menerima sinyal dari sistem kendali dan memanipulasi proses kendali. Selanjutnya tahapan proses adalah tahapan dimana terjadi perubahan dari variabel ukur (nilai terukur oleh alat atau sensor) karena adanya perlakuan manipulasi dari unsur akhir kendali dengan hasil yang dinamakan variabel termanipulasi. Variabel termanipulasi adalah variabel ukur yang telah dirubah agar menghasilkan nilai keluaran PID. Variabel termanipulasi ini nantinya akan digunakan sebagai acuan untuk sistem kendali dalam melakukan perhitungan dalam proses algoritma kendali untuk menghasilkan sinyal keluaran. Ilustrasi dari siklus kendali dapat dilihat pada Gambar 1.
Jenis sistem yang digunakan dalam pengendalian proses di penelitian ini adalah sistem kendali tertutup. Sistem kendali tertutup adalah sistem kendali yang menggunakan informasi dari alat ukur dan diumpankan kembali dari keluaran sistem untuk memodifikasi masukannya (Bolton 2004). Sistem kendali tertutup digunakan dengan harapan sistem kendali PID yang dijalankan berada pada kondisi otomatis. Menurut Haugen (2010) persamaan PID secara umum dapat ditunjukan seperti pada persamaan 1 berikut:
) 1 ( ) ( ) ( )
( e KT e t
T K t e K u t
u p d
i p p
0
Dimana u0 adalah variabel kendali manual (variabel dimasukan bila sistem kendali pada awal beroperasi dijalankan secara manual oleh operator. Bila sistem berjalan secara otomatis, nilai u0 tidak dimasukan). Simbol u(t) adalah keluaran kendali. Simbol e(t) adalah nilai simpangan (error) kendali.
y r (2)e
`
5 keluaran pada waktu tertentu. Persamaan 3 dirujuk dari persamaan PID yang terdapat di dalam Haugen (2010). Akan tetapi variabel tidak dimasukan karena PID yang digunakan termasuk dalam jenis otomatis.
(3) edt K Te t
T K t e K t
u p d
t
0 i p
p
Persamaan (3) dijabarkan menggunakan metode penurunan terbalik menjadi:
s k k d p k i p s k k p s 1 -k T t e t e T K t e T K T t e t e K T t u -tu( k) ( 1 1
Dilakukan penurunan di bagian kendali diferensial.
s k k k k d p k i p s k k p s 1 -k T t e t e t e t e T K t e T K T t e t e K T t u -tu( k) ( 1 1 1 2
Dilakukan penyetaraan pada ruas kiri dan ruas kanan.
(4) )) ( ) ( 2 ) ( ( ) ( 1)) ( ) ( ( ) ( )
( 1 k k1 k2
s d p k i s p k k p k
k et et et
T T K t e T T K t e t e K t u t u Keterangan
u(tk) : Sinyal keluaran PID.
Kp : Konstanta proporsional. Ti : Waktu integral (detik).
Td : Waktu derivatif (detik).
tk : Waktu koreksi (detik).
Ts : Waktu langkah (detik).
Nilai Ti didapat dari Ti = 2L, sedangkan Td didapat dari Td = 0.5L. Variabel L adalah waktu ketertinggalan pada awal sistem dijalankan dalam satuan detik. Variabel tk didapat dari nilai tk = k.Ts. Nilai k adalah faktor koreksi waktu. Penggunaan dari faktor koreksi waktu adalah untuk menyesuaikan sistem dengan keterbacaan data yang dikirim oleh alat ukur atau sensor. Berdasarkan persamaan 4 sinyal keluaran PID dipengaruhi oleh nilai galat dari variabel terukur pada waktu terukur dan waktu terukur sebelumnya. Secara teori nilai sinyal keluaran PID pada saat k-1 ikut dijumlahkan. Berdasarkan persamaan 4, sistem kendali PID merupakan sistem kendali yang bekerja berdasarkan perubahan nilai galat. Cara kerja sistem kendali PID menurut persamaan 4 yaitu menelusuri perubahan nilai galat yang terjadi, sehingga aksi dari kendali akan menyesuaikan dengan perubahan nilai galat yang terjadi.
6
Proses Penyerapan Nutrisi pada Tanaman Tomat
Penyerapan unsur hara oleh tanaman dipengaruhi oleh tiga proses yaitu difusi ion (unsur hara) dari tanah ke akar akibat dari perbedaan gradien ion akar dengan tanah, aliran massa air akibat proses transpirasi, dan penyerapan ion selektif oleh tanaman (Hanan 1998). Unsur NO3-, H2PO4, dan K+ umumnya di salurkan lebih cepat ketika tanaman menyalurkan unsur hara ke seluruh bagian tanaman, dan berpengaruh terhadap proses penyerapan serta laju transpirasi (Hanan 1998).
Unsur hara di dalam penelitian ini dipilih salah satu unsur yaitu NO3-, karena unsur tersebut termasuk unsur yang dibutuhkan tanaman dalam jumlah yang besar (unsur makro). Berdasarkan Rincon et al. (2005) jumlah kumulatif nitrogen terserap mengalami peningkatan selama 196 hari yang ditunjukan pada Gambar 18. Tanaman tomat yang ditanam menyerap nitrogen sekitar 65.100 gram. Penyerapan tersebut terjadi selama proses penanaman yaitu dari masa transplantasi sampai masa panen. Pola peningkatan tersebut dijadikan landasan analogi ketersediaan sejumlah nitrogen di dalam suatu wadah larutan nutrisi dalam penelitian ini.
METODOLOGI
Tempat dan Waktu Penelitian
Penelitian dilaksanakan pada bulan Mei 2014 hingga Agustus 2014. Kegiatan pengambilan data, simulasi, pengolahan dan penyusunan hasil penelitian dilakukan di Laboratorium Teknik Bioinformatika, Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian, Institut Pertanian Bogor.
Alat dan Bahan
Alat yang digunakan dalam penelitian ini terdiri atas laptop, software
Arduino 1.0.5 untuk pembuatan program, 1 buah sensor EC probe CS200, EC
`
7 Prosedur Penelitian
Kalibrasi sensor EC
Penelitian ini diawali dengan kalibrasi sensor EC dengan kode alat CS200 dan EC meter CM-21P yang dilakukan pada tanggal 23 Maret 2014 di Laboratorium Teknik Bioinformatika, Departemen Teknik Mesin dan Biosistem, Institut Pertanian Bogor. Kalibrasi dilakukan terhadap EC meter CM-21P terlebih dahulu. Kalibrasi untuk EC meter dibagi menjadi tiga tahap yaitu kalibrasi kering, kalibrasi EC rendah dan kalibrasi EC tinggi menggunakan larutan KCl. Setelah dilakukan kalibrasi terhadap EC meter CM-21P, dilakukan kalibrasi terhadap sensor EC CS200 dengan menggunakan beberapa titik volume AB mix yang digunakan sebagai bahan dalam penelitian ini dan hasil pengukuran sensor EC dibandingkan dengan alat ukur EC meter CM-21P. Tiap bagian pupuk A maupun bagian pupuk B memiliki perbandingan 1:1 sesuai dengan penggunaan pupuk cair hidroponik AB mix yang dianjurkan oleh distributor pupuk cair. Takaran yang telah ditentukan berturut-turut dicampurkan ke dalam 1 liter air. Pembacaan data dari sensor dilakukan melalui mikrokontroler EZO-COM dan komputer. Pembacaan EC meter CM-21P dilakukan melalui recorder yang sudah disertakan bersama EC meter.
Interpolasi linier
Penentuan nilai debit tetesan dari infus yang digunakan untuk simulasi penurunan konsentrasi larutan karena evapotranspirasi menggunakan metode interpolasi linier yang ditunjukan pada persamaan 5 dan persamaan 6. Persamaan dikutip dari Gloag et al. (2012).
) 5 ( a mx
y
) 6 ( 1 2 1 2 x x y y m Keterangan:
y2 : Nilai variabel terikat akhir x2 : Nilai variabel bebas akhir
y1 : Nilai variabel terikat awal x1 : Nilai variabel bebas awal
Simulasi penurunan konsentrasi larutan nutrisi karena proses evapotranspirasi
8
Data diperoleh dari Rincon et al. (2005), dimana sumber telah melakukan penelitian mengenai penurunan jumlah nitrogen yang disebabkan proses penyerapan nutrisi oleh tanaman tomat. Perolehan data penurunan bobot nitrogen didapat dari interpolasi terhadap grafik penurunan jumlah nitrogen yang terserap oleh tanaman, yang ditampilkan di dalam jurnal referensi. Interpolasi dilakukan karena data primer dari pengamatan penurunan jumlah nitrogen yang terserap oleh tanaman tidak ikut ditampilkan dalam referensi. Data interpolasi diperoleh dengan membandingkan jarak antar titik di dalam grafik dengan waktu dari peningkatan jumlah nitrogen yang terserap.
Sebelum dilakukan prosedur simulasi, dilakukan pencarian hubungan antara EC terukur dengan bobot nitrogen di dalam 5 liter air. Pencarian hubungan antara EC terukur dengan bobot nitrogen di dalam 5 liter air dilakukan dengan tujuan dapat diketahui hubungan linier antara bobot nitrogen dengan nilai EC terukur melalui konversi volume AB mix bila digunakan 5 liter air sebagai media pencampuran. Berdasarkan informasi yang tertera pada kemasan pupuk cair hidroponik AB mix bahwa dari total padatan AB mix yang belum dilarutkan dengan air, terkandung 9.900 % nitrogen (NO3-). Berdasarkan informasi tersebut, nilai bobot nitrogen dari hubungan antara EC terukur dengan bobot nitrogen dapat diketahui dari konversi total volume AB mix.
Setelah simulasi dilaksanakan, hasil dari simulasi di validasi terhadap data analogi penurunan kumulatif total nitrogen (NO3-) terserap di wadah larutan nutrisi.
Validasi data
Validasi dilakukan dengan menggunakan metode Root Mean Square Error (RMSE) pada persamaan 7. Validasi dilakukan dengan menggunakan persamaan RMSE pada Armstrong dan Collopy (1992).
) 7 ( ) ( RM SE 2
N A F N s s Keterangan:Fs : Data observasi N : Banyak data
As : Data model
Penentuan parameter kendali PID (Kp, Ki, Kd) secara trial & error
Sistem kendali PID yang dioperasikan tidak stabil ketika mencapai nilai titik acuan (set point). Maka dari itu diberikan suatu nilai toleransi agar semua kran bisa diposisikan pada posisi tertutup dan proses yang terjadi hanya proses pengadukan. Pengaturan dilakukan di awal terhadap nilai toleransi yaitu sebesar ±8.800 % dari nilai titik acuan (set point). Pengaturan dilanjutkan dengan menentukan nilai konstanta proporsional, konstanta integral dan konstanta derivatif secara berturut-turut yaitu sebesar 20, 3000, dan 200.
`
9 B dengan besar debit yang sama. Pengaturan dilakukan dengan memberikan penanda pada muka larutan di wadah larutan nutrisi. Sedangkan untuk air diatur agar debit air 500 ml/menit dengan memberikan penanda pada muka air di bagian wadah air. Debit aliran air dibedakan agar laju perubahan nilai EC saat penambahan larutan nutrisi dapat diimbangi dengan laju perubahan EC saat penambahan air.
Simulasi pengendalian EC dari larutan nutrisi
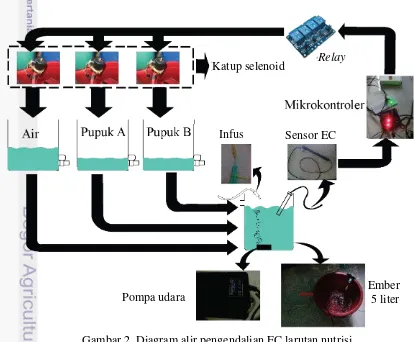
Simulasi dilakukan di Laboratorium Teknik Bioinformatika, Departemen Teknik Mesin dan Biosistem, Institut Pertanian Bogor, Bogor. Alat dan bahan yang digunakan untuk simulasi ini sama seperti yang digunakan untuk model penurunan konsentrasi larutan nutrisi karena proses evapotranspirasi. Hanya saja ditambahkan ember larutan nutrisi dan kran otomatis untuk sistem pengendalian. Simulasi ini dilakukan selama 2 hari, dengan pengambilan data setiap 50 menit sekali. Proses pengendalian EC dari larutan nutrisi terdapat pada Gambar 2.
Setelah nilai EC terukur oleh sensor EC, informasi nilai EC diterima mikrokontroler. Nilai EC terukur diolah oleh mikrokontroler agar dapat dihasilkan suatu nilai keluaran PID. Kombinasi bukaan kran pupuk cair hidroponik dan kran air ditentukan dari nilai keluaran PID yang dihasilkan. Perubahan nilai EC di wadah larutan nutrisi dipengaruhi oleh kombinasi bukaan kran pupuk cair hidroponik dan kran air.
Gambar 2 Diagram alir pengendalian EC larutan nutrisi Relay Katup selenoid
Pompa udara
10
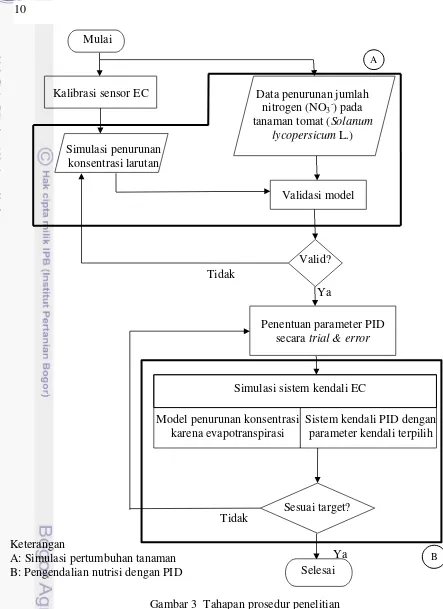
Gambar 3 Tahapan prosedur penelitian
Penentuan parameter PID secara trial & error Kalibrasi sensor EC
Validasi model
Valid? Ya
Sesuai target?
Ya Tidak
Tidak
Data penurunan jumlah nitrogen (NO3-) pada tanaman tomat (Solanum
lycopersicum L.) Simulasi penurunan
konsentrasi larutan
Selesai Mulai
A
B
Keterangan
A: Simulasi pertumbuhan tanaman B: Pengendalian nutrisi dengan PID
Model penurunan konsentrasi karena evapotranspirasi
Simulasi sistem kendali EC
`
11
HASIL DAN PEMBAHASAN
Kalibrasi Sensor EC
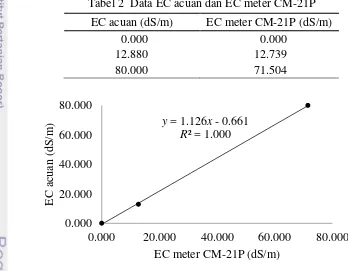
Kalibrasi sensor EC diawali dengan kalibrasi terhadap EC meter CM-21P terlebih dahulu. Hal ini dilakukan dengan tujuan sensor EC bisa mengukur nilai EC dari larutan hidroponik AB mix pada beberapa titik dan berkaitan dengan hal tersebut dibutuhkan suatu alat ukur yang sudah terstandar. Kalibrasi EC meter CM-21P dibagi menjadi tiga tahap sesuai dengan tata cara kalibrasi yang tertera di dalam datasheet sensor EC Atlas-Scientific. Kalibrasi dibagi menjadi tiga tahapan yaitu kalibrasi kering dimana EC meter dikondisikan tidak terkena larutan atau cairan apapun (EC probe kondisi kering), lalu kalibrasi dilanjutkan menggunakan larutan KCL dengan nilai EC 12.880 dS/m sebagai EC rendah dan 80.000 dS/m sebagai EC tinggi. Data hasil kalibrasi EC meter CM-21P dapat dilihat pada Tabel 2. Ditunjukan pada Tabel 2 nilai 0.000 pada bagian EC acuan dan EC terukur merupakan nilai EC pada kondisi EC meter kering. Grafik dari data di dalam Tabel 2 ditunjukan pada Gambar 4.
Persamaan regresi yang didapat yaitu y = 1.126x - 0.661, merupakan hasil pencarian regresi data terukur EC meter CM-21P terhadap EC acuan yaitu kalibrasi kering dan kalibrasi EC larutan KCL. Persamaan regresi tersebut digunakan untuk rentang nilai EC 0.587 dS/m sampai 71.504 dS/m dalam pengukuran EC meter sebelum dikalibrasi.
Setelah pengalibrasian EC meter CM-21P, dilakukan kalibrasi terhadap sensor EC CS200 Atlas-Scientific melalui EC meter CM-21P. Hasil dari kalibrasi
Gambar 4 Grafik hubungan antara data pengukuran EC meter CM-21P terhadap nilai EC acuan
y = 1.126x - 0.661 R² = 1.000
0.000 20.000 40.000 60.000 80.000
0.000 20.000 40.000 60.000 80.000
EC
acua
n
(dS/
m
)
EC meter CM-21P (dS/m)
Tabel 2 Data EC acuan dan EC meter CM-21P EC acuan (dS/m) EC meter CM-21P (dS/m)
0.000 0.000
12.880 12.739
12
dapat dilihat pada Tabel 3 dan Gambar 5. Persamaan regresi yang didapat dari hubungan EC terukur antara sensor EC CS 200 dengan EC meter CM-21P yaitu y = 1.228x - 0.721. Persamaan regresi tersebut hanya berlaku pada rentang nilai EC 0.587 dS/m sampai 80.000 dS/m pada pengukuran sensor EC sebelum dikalibrasi. Didapat nilai koefisien determinasi sebesar 0.998, yang memiliki makna bahwa 99.8 % keragaman diantara data EC meter CM-21P dapat dijelaskan korelasinya dengan data sensor EC CS200.
Mikrokontroler yang digunakan khusus untuk pembacaan EC merupakan kepingan kendali yang sudah ditanami perintah untuk pembacaan sinyal sensor EC CS200 Atlas-Scientific. Mikrokontroler ini memiliki kode produk EZO-COM dan memiliki 2 tipe serial komunikasi yaitu I2C dan UART. Serial komunikasi dalam penelitian ini dikondisikan pada kondisi UART (Universal Asynchronous Received Transmitter).
Gambar 5 Grafik hubungan antara data pengukuran dari sensor EC CS200 terhadap EC meter CM-21P
y = 1.228x - 0.721 R² = 0.998
0.000 2.000 4.000 6.000 8.000 10.000
0.000 2.000 4.000 6.000 8.000 10.000
EC
m
et
er
(dS/
m
)
Sensor EC (dS/m)
Tabel 3 Data pengukuran EC di dalam 1 liter air yang dilakukan menggunakan sensor EC CS200 dan EC meter CM-21P
Larutan Stok A (ml)
Larutan Stok B (ml)
Sensor EC (dS/m)
EC meter (dS/m)
0.900 0.900 0.509 0.008
2.500 2.500 1.564 1.196
5.000 5.000 2.878 2.696
7.500 7.500 3.968 4.126
10.000 10.000 5.102 5.681
12.500 12.500 6.000 6.728
15.000 15.000 6.700 7.167
`
13 Simulasi Penurunan Konsentrasi Larutan Nutrisi Karena Proses
Evapotranspirasi
Tampilan grafik yang digunakan untuk simulasi dapat dilihat pada Gambar 6. Penyetaraan dilakukan terhadap data penyerapan nitrogen oleh tanaman tomat dan menghasilkan grafik pada Gambar 6 agar didapat satuan gram/tanaman. Grafik sebelum dilakukan penyetaraan dapat dilihat pada Lampiran 2 di Gambar 18.
Pembacaan data dilakukan secara manual melalui tampilan serial komunikasi di dalam komputer dikarenakan keterbatasan dalam hal ketersediaan alat dan biaya untuk bisa menyiapkan suatu perekam data. Waktu simulasi dipercepat 98 kali dikarenakan tidak memungkinkan melakukan simulasi sesuai dengan waktu penanaman sebenarnya, atau dengan kata lain menjadi 2 hari. Penyesuaian dilakukan karena dalam simulasi dianalogikan bahwa penanaman pada kondisi nyata yang dilakukan yaitu 2 tanaman/m2 dan dilakukan pemanenan serta pengukuran bobot buah setelah 196 hari. Hal tersebut dilakukan karena tidak memungkinkan untuk pemodelan sesuai dengan waktu penanaman tomat sesungguhnya yaitu sekitar 196 hari dari penanaman sampai panen sesuai dengan penelitian yang dilakukan di dalam jurnal referensi. Percepatan dan penyesuaian seperti yang dijelaskan diatas ditampilkan pada Gambar 7.
Grafik pada Gambar 6 dan Gambar 7 merupakan peningkatan jumlah nitrogen yang diserap oleh tanaman tomat (Solanum lycopersicum L.) secara kumulatif. Berdasarkan Gambar 7, bila dianalogikan bahwa di dalam suatu wadah larutan nutrisi tanaman hidroponik, sejumlah nitrogen (NO3-) yang ada berkurang dikarenakan nitrogen tersebut hanya terserap oleh tanaman tomat, dengan kondisi
Gambar 6 Grafik peningkatan kumulatif total nitrogen (NO3-) terserap oleh tanaman tomat (Solanum lycopersicum L.) (Rincon et. al 2005) 0.000
20.000 40.000
0 50 100 150 200
Bobot yang di
ser
ap
(g/
ta
nam
an)
Waktu (hari)
Gambar 7 Grafik perubahan kumulatif total nitrogen (NO3-) terserap oleh tanaman tomat yang dipercepat menjadi 2 hari
0.000 0.200 0.400
0 0.5 1 1.5 2
Bobot yang dise
ra
p
(g/
ta
nam
an)
14
tidak ada perlakuan penggantian larutan nutrisi atau penambahan pupuk cair hidroponik agar jumlah nitrogen kembali ke kondisi yang diharapkan, maka penurunan tersebut ditunjukan dalam Gambar 8.
Menurut Maria (1997) simulasi adalah alat atau metode yang digunakan untuk mengevaluasi hasil dari kinerja sistem, yang telah ada atau masih direncanakan, dengan tujuan yang berbeda-beda dan dilakukan selama jangka waktu dari waktu sebenarnya. Simulasi yang telah dilakukan memiliki konsep bahwa penurunan sejumlah nitrogen yang terjadi di dalam wadah larutan nutrisi dikarenakan terserap oleh tanaman dan larutan nutrisi di dalam wadah tersebut tidak diberikan perlakuan penambahan pupuk cair.
Sebelum dilakukan simulasi penurunan konsentrasi larutan karena proses evapotranspirasi, dilakukan pencarian hubungan antara EC terukur dengan bobot nitrogen. Data pencarian hubungan antara EC terukur dengan bobot nitrogen dapat dilihat di dalam Tabel 4 dan grafik dari data hubungan EC terukur dengan bobot nitrogen dapat dilihat pada Gambar 9.
Gambar 8 Grafik analogi penurunan kumulatif bobot nitrogen (NO3-) terserap di wadah larutan nutrisi
0.000 0.200 0.400
0 0.5 1 1.5 2
Bobot Nitr
ogen
(gr
am
)
[image:30.595.101.439.459.749.2]Waktu (hari)
Tabel 4 Data EC terukur dengan bobot nitrogen di dalam 5 liter air Bobot nitrogen
(gram)
EC terukur (dS/m)
0.149 0.290
0.311 0.623
0.622 1.242
1.244 2.462
Gambar 9 Grafik EC terukur dengan total volume AB mix di dalam 5 liter air
y = 1.980x + 0.001 R² = 1
0.000 1.000 2.000
0.000 0.500 1.000 1.500
Nila
i
EC
(dS/
m
)
`
15 Regresi linear dilakukan terhadap data pada Tabel 4 dan didapat persamaan regresi Persamaan tersebut digunakan untuk melakukan penyetaraan nilai EC terukur menjadi bobot nitrogen (NO3-). Persamaan regresi EC terukur dengan bobot nitrogen hanya digunakan diantara nilai EC 0.002 dS/m sampai 2.462 dS/m.
Berdasarkan Gambar 8 dapat dilihat bahwa penurunan bobot nitrogen dari hari ke-0 sampai hari ke-2 tidak memiliki pola yang sama. Grafik penurunan bobot nitrogen didekati menggunakan polinomial. Pengaturan debit tetesan infus sulit didekati menggunakan polinomial dan pengaturan debit tetesan pada proses pengenceran larutan nutrisi selanjutnya didekati secara linier. Maka dari itu dibagi menjadi beberapa bagian pola penurunan bobot nitrogen dari hari ke-0 sampai hari ke-2. Pada awalnya digunakan 6 penetes karena telah ditentukan 6 pola penurunan dari hari ke-0 sampai hari ke-2. Akan tetapi saat dilakukan simulasi, penetes yang dapat meneteskan debit dan memberi dampak penurunan konsentrasi mendekati model penurunan bobot nitrogen hanya 3 penetes.
Hasil simulasi penurunan konsentrasi larutan nutrisi hidroponik karena proses evapotranspirasi ditampilkan pada Gambar 10. Dilakukan validasi data simulasi terhadap data model penurunan bobot nitrogen. Nilai RMSE didapat sebesar 0.025 dengan koefisien determinasi (R2) 0.973. Berdasarkan hasil validasi RMSE, rata-rata nilai simpangan data simulasi yang didapat dari pengukuran aktual dibandingkan dengan data model penurunan bobot nitrogen yaitu sebesar 0.025 dengan satuan gram. Hasil pencarian koefisien determinasi menunjukan 97.3% di antara keragaman data model penurunan nitrogen selama 2 hari yang dijadikan sebagai referensi dapat dijelaskan korelasinya oleh data penurunan bobot nitrogen dari EC terukur hasil simulasi penurunan konsentrasi larutan karena proses evapotranspirasi.
[image:31.595.112.521.465.782.2]Berdasarkan nilai RMSE dan koefisien determinasi yang didapat, bisa dikatakan bahwa model simulasi penurunan konsentrasi larutan hara budidaya tomat selama 196 hari sudah dapat disimulasikan.
Gambar 10 Grafik penurunan konsentrasi larutan selama 2 hari, grafik observasi ( ) dan grafik model penurunan bobot nitrogen ( )
0.000 0.100 0.200 0.300 0.400
0 0.5 1 1.5 2
Jum
la
h
Nitr
ogen
(gr
am
)
16
Penentuan Parameter Kendali PID (Kp, Ki, Kd) Secara Trial & Error
Pengaturan dilakukan dengan melihat kinerja sistem kendali yang ditunjukan dari settling time. Settling time adalah waktu yang dibutuhkan oleh kurva respon untuk tercapainya nilai akhir dan diam pada nilai tersebut (Ogata 2010). Berdasarkan Gambar 11 ditunjukan hasil dari pengaturan sistem dengan nilai konstanta proporsional, konstanta integral dan konstanta derivatif berturut-turut yaitu 20, 3000, dan 200. Data dari settling time dan steady state error dapat dilihat pada Tabel 5. Perubahan nilai EC yang ditunjukan pada Gambar 11 menunjukan respon sistem belum stabil yang ditandai dengan nilai settling time di titik target 1.500 dS/m mencapai 28.117 menit. Nilai galat kondisi setimbang (steady state error) juga dipertimbangkan untuk mengevaluasi kinerja sistem.
Nilai steady state error terjadi ketika lingkungan yang dikendalikan PID sudah setimbang. Proses trial & error dilakukan agar nilai settling time dan steady
state error dapat diperkecil dalam pengendalian EC di sekitar nilai target.
[image:32.595.84.470.266.709.2]Pengaturan awal dilakukan dengan tujuan memperkecil settling time. Setelah didapat Kp, Ki ,Kd yang tepat nilai toleransi diatur agar diperoleh steady state error yang lebih kecil.
Gambar 11 Grafik pengaturan Kp=20, Ki=3000, dan Kd=200, dengan nilai target 0.500 dS/m
, 1.500 dS/m
, 2.500 dS/m
, 6.000 dS/m
0.0002.000 4.000 6.000 8.000 10.000
0 50 100 150 200
NI
la
i
EC (d
S/m
)
Waktu (menit)
Gambar 12 Grafik pengaturan Kp=10, Ki=4000, Kd=200, dengan nilai target 0.500 dS/m
, 1.500 dS/m
, 2.500 dS/m
, 6.000 dS/m
0.000 2.000 4.000 6.000 8.000 10.000
0 50 100 150 200
NIla
i
EC
(dS/
m
)
`
17 Berdasarkan Gambar 12, trial & error dilakukan dengan mengubah nilai konstanta proporsional dan konstanta integral, serta merubah nilai target untuk melihat respon kendali. Konstanta derivatif tidak ikut dirubah karena bila dirubah kurang berpengaruh terhadap respon sistem, akan tetapi berpengaruh dalam peredaman osilasi dari nilai EC disekitar nilai target. Peubahan dilakukan terhadap nilai konstanta proporsional menjadi 10 dan konstanta integral menjadi 4000 dan didapat nilai rata-rata settling time 9.040 menit.
Pengaturan sistem kendali PID pada pengendalian nilai EC dari larutan nutrisi hidroponik dilakukan berdasarkan karakteristik konstanta PID yang dijelaskan oleh Neary (2004). Konstanta proporsional bertindak sebagai pengoreksi dan penambah di dalam sistem kendali PID. Seiring dengan penambahan nilai konstanta proporsional, maka respon sistem semakin meningkat, tetapi kestabilan respon sistem akan semakin berkurang dan mengakibatkan kondisi parameter terukur melampaui nilai target (overshoot). Pada hakikatnya, meskipun konstanta proporsional mengurangi nilai simpangan dari parameter terukur terhadap nilai target, perubahan tersebut tidak benar-benar menjadikan nilai simpangan tersebut menjadi 0. Simpangan tersebut bisa mencapai 0 bila kita menambahkan konstanta integral di dalam sistem. Konstanta integral dapat meningkatkan respon sistem kendali secara stabil sampai nilai galat mencapai atau mendekati 0. Meskipun begitu, walau nilai konstanta integral ditingkatkan, akan mengakibatkan osilasi pada parameter terukur, sehingga akan memberikan efek perubahan nilai parameter terukur disekitar nilai target. Maka dari itu diperlukan konstanta derivatif untuk menekan atau mengurangi jumlah dari osilasi di sekitar nilai target tersebut. Semakin tinggi nilai konstanta derivatif, maka semakin berkurang osilasi di sekitar nilai target yang terjadi. Akan tetapi akan memberi dampak pada repson sistem yang semakin berkurang dan mengakibatkan keterlampauan nilai parameter terukur (overshoot) (Neary 2004).
Pengaturan dilakukan untuk memperkecil settling time dengan meningkatkan nilai Ki dan mengurangi nilai Kp. Nilai Kp dan Ki dirubah secara berturut-turut menjadi 5 dan 5000. Hasil dari pengaturan terhadap nilai Kp dan Ki tersebut ditampilkan pada Gambar 13.
Gambar 13 Grafik pengaturan Kp=5, Ki=5000, Kd=200, dengan nilai target 0.500 dS/m
, 1.500 dS/m
, 2.500 dS/m
, 6.000 dS/m
0.000 2.000 4.000 6.000 8.000 10.000
0 20 40 60 80 100
Nila
i
EC
(dS/
m
)
[image:33.595.111.515.472.796.2]18
Pengaturan dilakukan terhadap konstanta proporsional, dari nilai 5 menjadi nilai 3, agar nilai keterlampauan (overshoot) dari EC terukur terhadap nilai target dapat diredam seperti yang ditunjukan pada Gambar 14. Nilai rata-rata settling time didapat sebesar 4.462 menit, dimana sebelumnya pada nilai Kp=5 didapat nilai rata-rata settling time 3.938 menit.
Terlihat bahwa tidak banyak perubahan yang terjadi dan masih ada keterlampauan nilai EC terukur terhadap target. Nilai konstanta proporsional, konstanta integral dan konstanta derivatif berturut-turut yaitu 5, 5000, 200 dipilih karena memberikan respon yang lebih cepat.
Pengaturan selanjutnya dilakukan terhadap nilai toleransi untuk nilai titik acuan, yaitu merubah nilai dari ±8.800 % menjadi ±6 %. Hal ini dilakukan untuk memperkecil nilai steady state error. Hasil dari pengaturan dengan nilai toleransi ±6 % ditunjukan pada Gambar 15.
Setelah dilakukan pengaturan terhadap nilai toleransi untuk nilai titik acuan, nilai steady state error dapat sedikit teredam dengan nilai rata-rata steady state
error 0.025 dS/m dan nilai rata-rata settling time 7.345 menit. Walaupun settling
time yang didapat lebih besar daripada ketika nilai toleransi ±8.800 %, masih
[image:34.595.95.483.163.379.2]lebih baik dibandingkan dengan parameter kendali yang telah didapat sebelumnya Gambar 14 Grafik pengaturan Kp=3, Ki=5000, Kd=200, dengan nilai target 0.500
dS/m
, 1.500 dS/m
, 2.500 dS/m
, 6.000 dS/m
0.000 2.000 4.000 6.000 8.000 10.000
0 50 100 150 200 250
Nila
i
EC (
dS/
m
)
Waktu (menit)
Gambar 15 Grafik pengaturan Kp=5, Ki=5000, Kd=200, dengan nilai target 0.500 dS/m
, 1.500 dS/m
, 2.500 dS/m
, 6.000 dS/m
(nilai toleransi ±6 %)0.000 2.000 4.000 6.000 8.000 10.000
0 50 100 150 200 250
Nila
i
EC
(dS/
m
)
[image:34.595.94.479.486.648.2]`
19 dengan nilai steady state error dapat diredam dan mempertimbangkan settling
time yang lebih kecil. Berdasarkan pengaturan yang telah dilakukan, nilai
konstanta proporsional, konstanta integral, konstanta derivatif, nilai toleransi sistem kendali PID yang digunakan secara berturut-turut adalah 5, 5000, 200, ±6 %.
[image:35.595.109.511.257.742.2]Nilai overshoot yang terjadi ketika pengaturan nilai Kp, Ki, Kd (di nilai target 0.5 dS/m pada Gambar 11 dan Gambar 12) disebabkan adanya arus pendek yang menyebabkan aktuator (kran on/off) terbuka dan tertutup, sehingga ada sebagian larutan hidroponik yang tertuang dan ikut teraduk. Pada nilai target 0.5 dS/m di Gambar 13 dan Gambar 14 ketika sudah tercapai kondisi di satu titik nilai EC, setelah beberapa lama nilai EC masih mengalami penurunan. Akibatnya ketika sudah melampaui nilai toleransi, kran untuk pupuk cair terbuka.
Tabel 5 Nilai settling time dan steady state error untuk tiap nilai target Nilai
toleransi Kp Ki Kd
Nilai target (dS/m)
Settling time (menit)
Steady state error (dS/m)
±8.800 %
20 3000 200
2.500 16.650 0.020
6.000 18.000 0.030
1.500 28.117 0.020
0.500 2.716 0.010
Rata-rata 16.371 0.020
10 4000 200
2.500 12.333 0.010
6.000 2.250 0.040
1.500 10.400 0.050
0.500 11.184 0.020
Rata-rata 9.042 0.030
5 5000 200
2.500 4.000 0.120
6.000 0.917 0.170
1.500 5.450 0.110
0.500 5.385 0.020
Rata-rata 3.938 0.105
3 5000 200
2.500 7.000 0.190
6.000 1.183 0.380
1.500 5.383 0.090
0.500 4.283 0.020
Rata-rata 4.462 0.170
±6 % 5 5000 200
2.500 6.517 0.010
6.000 2.930 0.010
1.500 6.200 0.070
0.500 13.733 0.010
20
Simulasi Pengendalian EC dari Larutan Nutrisi
Simulasi ini dilakukan dengan menggunakan model yang telah divalidasi sebelumnya di dalam simulasi penurunan konsentrasi larutan nutrisi karena proses evapotranspirasi. Hasil dari simulasi pengendalian EC dari larutan nutrisi dapat dilihat pada Gambar 16.
Dapat dilihat di Gambar 16, bahwa sistem dapat menjaga nilai EC disekitar nilai target yaitu 0.710 dS/m dengan kondisi nilai EC terukur tidak keluar dari rentang nilai toleransi yang diberikan yaitu ±6 %. Pada Gambar 16 pengendalian EC larutan nutrisi
dibandingkan dengan model penurunan konsentrasi larutan nutrisi karena proses evapotranspirasi
. Setelah data ditampilkan dalam bentuk nilai EC, data dikonversi menjadi bobot nitrogen agar bisa dibandingkan dengan model dari simulasi penurunan konsentrasi larutan nutrisi karena proses evapotranspirasi. Tampilan data dibandingkan dengan model penurunan konsentrasi larutan ditunjukan pada Gambar 17.Pada Gambar 17, ditunjukan hasil dari simulasi sistem kendali EC dalam bentuk bobot nitrogen dengan satuan gram. Hasil tersebut kemudian divalidasi dengan nilai target yang ditandai dengan simbol
pada Gambar 17. Nilai target ditentukan sebesar 0.358 gram berdasarkan jumlah bobot nitrogen di awal kondisiGambar 16 Grafik simulasi sistem kendali EC yang dilakukan selama 2 hari dengan nilai target 0.710 dS/m
0.000 0.200 0.400 0.600 0.800
0 1 2 3
EC te rukur (dS/ m ) Waktu (hari)
Gambar 17 Grafik simulasi bobot nitrogen
yang dibandingkan dengan model penurunan konsentrasi larutan nutrisi karena proses evapotranspirasi
0.000 0.100 0.200 0.300 0.400
0 1 2 3
[image:36.595.90.402.505.702.2]`
21 simulasi dan dijaga di sekitar nilai tersebut. Adapula perubahan nilai EC pada pengendalian nilai EC oleh sistem kendali PID dipengaruhi oleh efek penggaraman. Terjadi pengendapan sebelum seluruh bagian pupuk AB mix tercampur di dalam wadah larutan nutrisi. Akibatnya garam yang terbentuk dari proses pengendapan tersebut ikut tercampur pada pengadukan berikutnya. Sehingga memberi dampak nilai EC terus meningkat, yang semestinya kondisi larutan nutrisi sudah setimbang. Kondisi tersebut serupa dengan yang terjadi pada penelitan mengenai perubahan nilai EC larutan nutrisi di dalam penelitian oleh Massa et al. (2011). Pada penelitian tersebut, tangki berisi wadah larutan tidak diberikan perlakuan untuk penggantian larutan nutrisi. Larutan nutrisi diganti apabila nilai EC dari larutan nutrisi sudah mencapai nilai EC maksimal. Nilai EC maksimal sudah ditentukan sebelum dilakukan pencampuran dan dalam penelitian tersebut EC maksimal ditentukan pada nilai 4.500 dS/m. Proses penambahan pupuk cair hidroponik terus dilakukan seiring dengan pertambahan waktu dan larutan nutrisi dialirkan ke tanaman. Akibat dari perlakuan tersebut, ada akumulasi dari unsur hara yang berada di larutan nutrisi dan unsur hara tersebut saling bereaksi karena perbedaan jenis ion dari unsur hara. Akumulasi tersebut menghasilkan garam NaCl yang memberi dampak ketika dilakukan pengukuran nilai EC larutan nutrisi, nilai EC terukur meningkat.
Setelah dilakukan simulasi, data dipindahkan ke MS Excel untuk selanjutnya ditampilkan dalam bentuk grafik. Metode validasi yang digunakan adalah metode RMSE. Validasi dilakukan terhadap dua tipe data yaitu validasi untuk data EC terukur dan validasi untuk bobot nitrogen. Validasi yang dilakukan terhadap EC terukur didapat nilai rata-rata simpangan 0.023 dS/m atau dalam bentuk presentase 2.300 %. Validasi juga dilakukan terhadap bobot nitrogen terukur dan didapat nilai rata-rata simpangan 0.012 gram atau dalam bentuk presentase 1.200 %. Data EC terukur berada pada rentang nilai toleransi yaitu ±6 %, dengan batas bawah 0.667 dan batas atas 0.752. Maka dari itu, dapat dikatakan bahwa sistem kendali PID yang dioperasikan selama 2 hari dapat menjaga nilai EC di sekitar nilai target. Jika dilakukan pengendalian nilai EC pada waktu sebenarnya yaitu 196 hari, maka pola nilai EC terukur nantinya di dalam tampilan grafik seperti pada Gambar 16 akan terlihat lebih halus (mendekati garis lurus) karena tiap data nilai EC terukur mendekati nilai target acuan.
SIMPULAN
22
bahwa sistem kendali PID yang dibangun dapat menjaga nilai EC di sekitar nilai target.
SARAN
Untuk diaplikasikan pada sistem nyata, perlu dilakukan analisis dimensional lebih lanjut. Pengembangan suatu metode optimasi dan metode komputasi perlu dilakukan untuk mencari nilai konstanta proporsional, konstanta integral dan konstanta derivatif yang paling ideal untuk pengendalian konsentrasi larutan nutrisi menggunakan sistem kendali PID.
DAFTAR PUSTAKA
[AS] Atlas-Scientific. 2014. EZO class embedded electrical conductivity circuit (datasheet). Broklyn (US): Atlas-Scientific.
Armstrong JS, Collopy F. 1992. Error measures for generalizing about forecasting methods: empirical comparisons. International Journal of Forecasting. 8(2): 69-80.
Bolton W. 2004. Sistem Instrumentasi dan Sistem Kontrol. Jakarta (ID): Erlangga. Considine DM. 1976. Van Nostrand’s: Scientific Enc clopedia fifth edition. New
York (US): Van Nostrand Reinhold.
Gloag A, Gloag A, Kramer M. 2012. Linear Interpolation and Extrapolation. California (US): CK-12.
Hanan JJ. 1998. Greenhouses: Advanced Technology for Protected Horticulture. Florida (US): CRC Pr.
Haugen F. 2010. Discretization of simulator, filter, and PID controller. TechTeach [Internet]. [diunduh 30 Juni 2014]; 2(1): 1-10. Tersedia pada: techteach.no/publications/articles/discretization/discretization.pdf.
Jaimes-Ponce J, Liceaga-Castro JU, Alcantara-Ramirez R, Siller-Alcala II. 2013. Control of nutrients in a NFT system in production of spinach based on control of electrical conductivity and water flow. International Journal of Circuits, Systems and Signal Processing. 7(2): 134-141.
Maria A. 1997. Introduction to modelling and simulation. Di dalam: Andradóttir S, Healy KJ, Withers DH, Nelson BL, editor. Proceedings of the 29th conference on Winter simulation; 1997 Des 7-10; New York, USA. Washington (US): IEEE Computer Society. hlm 7-13.
`
23 Neary E. 2004. Mixed-signal control circuits use microcontroller for flexibility in implementing PID algorithms. Analog Dialogue [Internet]. [diunduh 23 Mar 2014]; 38(1): 1-3. Tersedia pada: http://www.analog.com/analogdialogue. Novella MB, Andriolo JL, Bisognin DA, Cogo CM, Bandinelli MG. 2008.
Concentration of nutrient solution in the hydroponic production of potato minitubers. Ciȇncia Rural, Santa Maria. 38(6): 1529-1533.
Ogata K. 2010. Modern Control Engineering. New Jersey (US): Prentice Hall. Parks S, Murray C. 2011. Leafy Asian Vegetables and Their Nutrition in
Hydroponics. New South Wales (AU): NSW Industry & Investment.
Rincon LP, Perez A, Abadia A, Pellicer C. 2005. Yield, water use and nutrient uptake of a tomato crop grown on coconut coir dust. Acta Hort. 697(1): 73-79. Sesmininggar A. 2006. Optimasi konsentrasi larutan hara tanaman pak choi
(Brassica rapa L. cv. group Pak Choi) pada teknologi hidroponik sistem terapung [skripsi]. Bogor (ID): Institut Pertanian Bogor.
Setiawan L. 2007. Optimasi konsentrasi larutan hara tanaman pada budidaya selada (Lactuca sativa L. var. Grand Rapids) dengan teknologi hidroponik sistem terapung (THST) [skripsi]. Bogor (ID): Institut Pertanian Bogor.
Shaw J. 2003. The PID Control Algorithm: How it works, how to tune it, and how
to use it: 2th edition. New York (US): Rochester.
Suhardiyanto H. 2009. Teknologi Rumah Tanaman untuk Iklim Tropika Basah: Pemodelan dan Pengendalian Lingkungan. Bogor (ID): IPB Pr.
Tehrani KA, Mpanda A. 2012. Introduction to PID Controllers-Theory, Tunning and Application to Frontier Areas. Panda RC, editor. Rijeka (HR): InTech. Whipker BE, Cavins TJ. 2000. Electrical conductivity (EC): units and conversions.
Florex [Internet]. [diunduh 2 Maret 2014]; 2(1): 1-2. Tersedia pada: http://www.ces.ncsu.edu/floriculture.
24
Lampiran 1 Algoritma dari program sistem kendali PID #include <PID_v1.h>
int pin1 = 6; int pin2 = 9; float x = 0.66; float y = 0.75;
double Setpoint, Input, Output;
PID myPID(&Input, &Output, &Setpoint,5,5000,200, REVERSE); int WindowSize = 1600;
unsigned long windowStartTime; void setup()
{
windowStartTime = millis(); Serial.begin(9600);
Serial3.begin(9600); Setpoint = 0.71;
myPID.SetOutputLimits(0, WindowSize); myPID.SetMode(AUTOMATIC);
pinMode(pin1, OUTPUT); pinMode(pin2, OUTPUT); }
void loop() {
Serial1.write("R"); char dummy1[10]={};
Serial3.readBytesUntil(',',dummy1,10); float EC_val = atof(dummy1);
char dummy2[10]={};
Serial3.readBytesUntil(',',dummy2,10); float TDS_val = atof(dummy2); char dummy3[10]={};
Serial3.readBytesUntil(',',dummy3,10); int Led3_val = atoi(dummy3); char dummy4[40]={};
Serial3.readBytesUntil('\n',dummy4,40); float EC_true = (1.228*EC_val)-0.721; float EC_PID = EC_true*10E-4; Input = EC_PID;
myPID.Compute();
`
25 Lampiran 1 (lanjutan)
{
windowStartTime = millis(); }
if(Output < millis() - windowStartTime) { digitalWrite(pin1,HIGH);
digitalWrite(pin2,LOW); }
if(Output > millis() - windowStartTime){ digitalWrite(pin1, LOW);
digitalWrite(pin2, HIGH); }
if(Input > x && Input < y){ digitalWrite(pin1, LOW); digitalWrite(pin2, LOW); }
Serial.println(EC_true);
26
Lampiran 2 Contoh perhitungan untuk pencarian pola penurunan bobot nitrogen Pembesaran ukuran dilakukan terhadap grafik di Gambar 18 dan pengukuran dilakukan menggunakan penggaris. Jarak antara nilai 0 g/m2 dengan 40 g/m2 memiliki jarak 2.3 cm.
Penyesuaian dilakukan terhadap nilai bobot nitrogen dari Gambar 18 karena nilai tersebut terlalu besar bila digunakan untuk pemodelan simulasi penurunan konsentrasi larutan karena proses evapotranspirasi. Berdasarkan proses penyesuaian dihasilkan nilai bobot nitrogen 0.5 kali dari sebelumnya berdasarkan kerapatan penanaman yaitu 2 tanaman/m2 dan dihasilkan grafik yang ditunjukan pada Gambar 5.
Gradien perubahan volume dari air di dalam wadah pencampuran digunakan dan arah gradien berbeda dengan arah gradien penurunan bobot nitrogen di dalam wadah pencampuran. Sehingga pada persamaan 6 nilai gradien dikalikan dengan -1. Debit untuk tiap infus ditunjukan pada Tabel 5 dan data penurunan bobot nitrogen di dapat dari Tabel 6.
1 2
1 2
x x
y y m
mpola 1 = 0.142 liter/hari m pola 1
= 5.907 mililiter/jam
Berdasarkan Gambar 18, grafik penurunan bobot nitrogen didekati menggunakan polinomial. Selajutnya didekati secara linier untuk trial & error terhadap infus. Debit yang terpakai hanya debit pada pola 1, pola 2 dan pola 3 karena setelah diaplikasikan ke infus, debit dari pola 4, pola 5, pola 6 terlalu besar.
Gambar 18 Perubahan berdasarkan waktu untuk nutrisi yang disuplai ( ), dibuang ( ), dan diserap oleh tanaman tomat ( ) (Rincon et al. 2005)
m o
i r( r m r m r m
[image:42.595.98.433.296.649.2]`
27
Keterangan: (pola 1), (pola 2), (pola 3), (pola 4), (pola 5), (pola 6) Gambar 19 Pembagian pola perubahan jumlah nitrogen terserap
y = -0.1023x5 + 0.5817x4 - 1.1382x3 + 0.7581x2 - 0.1676x + 0.3632
R² = 0.9958
0.000 0.050 0.100 0.150 0.200 0.250 0.300 0.350 0.400
0 0.5 1 1.5 2
Bobot nit
roge
n
(gr
am
)
Waktu (hari)
Tabel 6 Data pencarian debit tetesan infus Pola Debit tetesan (ml/jam)
1 5.907
2 117.953
3 92.593
4 277.781
5 648.137
28
Lampiran 3 Contoh perhitungan untuk validasi menggunakan Root Mean Square Error (RMSE)
Berikut ditunjukan contoh perhitungan validasi terhadap data model penurunan konsentrasi larutan nutrisi karena proses evapotranspirasi menggunakan persamaan 7.
Data referensi model penurunan konsentrasi larutan nutrisi karena proses evapotranspirasi dengan parameter bobot nitrogen dan data hasil simulasi penurunan konsentrasi larutan nutrisi selama dua hari dengan parameter bobot nitrogen ditunjukan pada Tabel 7.
[image:44.595.107.451.252.747.2]Nilai galat (error) dihitung dengan menggunakan rumus RMSE pada persamaan 7.
Tabel 7 Data penurunan bobot nitrogen referensi dan hasil simulasi Waktu (hari) Data acuan (gram) Data simulasi (gram)
0 0.358 0.353
0.071 0.358 0.353
0.142 0.358 0.353
0.214 0.357 0.353
0.285 0.356 0.353
0.357 0.355 0.353
0.428 0.354 0.353
0.500 0.353 0.352
0.571 0.352 0.350
0.642 0.351 0.348
0.714 0.350 0.347
0.785 0.342 0.338
0.857 0.333 0.318
0.928 0.324 0.280
1.000 0.302 0.248
1.071 0.280 0.230
1.142 0.253 0.215
1.214 0.226 0.199
1.285 0.200 0.176
1.357 0.173 0.166
1.428 0.164 0.131
1.500 0.155 0.103
1.571 0.133 0.088
1.642 0.106 0.079
1.714 0.093 0.063
1.786 0.049 0.054
1.857 0.031 0.044
1.928 0.000 0.028
`
29
29
0.000) (0.010
0.000) (0.028
0.358)
(0.353 2 2 2
RMSE
30
Lampiran 4 Informasi kandungan nutrisi pupuk AB mix
Informasi mengenai kandungan nitrogen (NO3-) di dalam pupuk hidroponik
AB mix yang digunakan terdapat pada kemasan pupuk hidroponik AB mix.
Informasi mengenai kandungan nutrisi dari pupuk hidroponik AB mix terdapat pada Tabel 8. Terlebih dahulu dilakukan penimbangan terhadap pupuk hidroponik
AB mix dan didapat berat total pupuk 628.133 gram. Pupuk hidroponik AB mix
[image:46.595.161.369.150.382.2]dapat diencerkan menjadi 2 liter pupuk cair. Kemasan dari pupuk cair hidroponik AB mix dapat dilihat pada Gambar 20.
Tabel 8 Kandungan nutrisi yang terdapat di dalam total padatan AB mix
Unsur Presentase (%)
Kalsium (Ca) 8.300
Nitrogen (NO3-) 9.900
Kalium (K) 16.500
Fosfat (PO43-) 9.900
Sulfat (S) 6.600
Magnesium (Mg) 2.800
Fe EDTA 0.040
Boron (B) 0.010
Mangan (Mn) 0.010
Seng (Zn) 0.010
Kuprum (Cu) 0.009
Molibdenum (Mo) 0.009
Sumber: CV. Agrifam
Sumber: agrifam.com
`
31
RIWAYAT HIDUP
Penulis dilahirkan di Rumah Sakit Harapan Kita, Slipi, Jakarta Barat pada tanggal 27 Juni 1992. Penulis adalah putra kedua dari dua bersaudara, anak dari Putu Asiagama (Bapak) dan Ni Made Sri Seputri (Ibu). Penulis mengenyam pendidikan sekolah menengah pertama di SMPN 111, Kemanggisan, Jakarta Barat. Lalu penulis melanjutkan pendidikan menengah atas di SMAN 112, Pesanggrahan, Jakarta Barat. Setelah penulis lulus dari pendidikan SMA, penulis melanjutkan pendidikan ke jenjang yang lebih tinggi yaitu dengan mengambil jalur USMI IPB, dengan Jurusan Teknik Mesin dan Biosistem.