Fuzzy Logic Control Of An Autonomous Mobile Robot.
Bebas
24
0
0
Teks penuh
Gambar
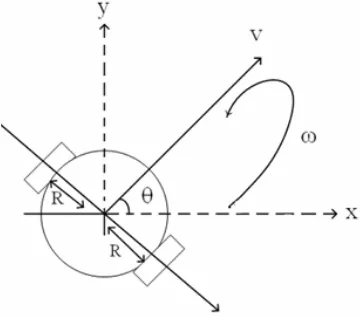
![Figure 2.2: Unicycle Mobile Robot with Xm-Ym Coordinate System [6]](https://thumb-ap.123doks.com/thumbv2/123dok/620911.74823/20.612.183.421.524.684/figure-unicycle-mobile-robot-xm-ym-coordinate.webp)
Dokumen terkait
Weak, M:Moderate, LW:La Nina Weak, and LS:La Nina Strong). II can be seen that the Onset resulted by the model are relevant to what c1imatologists would say in real life
Dari pengujian yang dilakukan, terlihat dari perhitungan data menggunakan sistem fuzzy logic apabila dibandingkan dengan perhitungan data secara manual hanya
Therefore, the reference source currents that are used to decide the switching of the SAF have two parts: one is the real fundamental-frequency component of the load current, which is
This research aims to implement a navigation system based on Dewantara & Ariyadi, 2021 with the combination of the Fuzzy-Social Force Model FSFM into a mobile robot that can navigate
