SISTEM NAVIGASI PADA ROBOT PEMADAM API
MENGGUNAKAN WALL FOLLOWING
DAN LOGIKA FUZZY
ERWIN MUSA YULIO CHRISWANTORO
DEPARTEMEN ILMU KOMPUTER
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT PERTANIAN BOGOR
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa skripsi berjudul Sistem Navigasi pada Robot Pemadam Api Menggunakan Wall Following dan Logika Fuzzy adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, Juli 2013
Erwin M Y Chriswantoro
ABSTRAK
ERWIN M Y CHRISWANTORO. Sistem Navigasi pada Robot Pemadam Api Menggunakan Wall Following dan Logika Fuzzy. Dibimbing oleh KARLISA PRIANDANA dan MUSHTHOFA.
Robot memerlukan navigasi yang baik untuk menyelesaikan tugasnya. Salah satu cara untuk memberikan kemampuan navigasi pada robot ialah kecerdasan buatan. Kemampuan navigasi menggunakan kecerdasan buatan dapat dikaitkan dengan kemampuan sensor menerima masukan dari lingkungan. Masukan dari lingkungan bersifat tidak pasti sehingga pemodelan yang sederhana tidak cukup mewakili. Logika fuzzy diharapkan dapat mengatasi ketidakpastian tersebut. Penelitian ini bertujuan mengembangkan sistem navigasi pada robot pemadam api menggunakan algoritme wall following dan logika fuzzy. Sistem disimulasikan pada lingkungan KRPAI 2013 yang mengharapkan robot dapat menelusuri dinding, memadamkan api, dan kembali ke home. Hasil penelitian menunjukan bahwa robot berhasil menyelesaikan misi KRPAI 2013 dengan persentase kesuksesan mencapai 87.5%.
Kata kunci: logika fuzzy, pemadam api, robot, wall following
ABSTRACT
ERWIN M Y CHRISWANTORO. Navigation System on Fire-Fighter Robot Using Wall Following and Fuzzy Logic. Supervised by KARLISA PRIANDANA and MUSHTHOFA.
A robot needs a good navigation to complete its task. One way to provide navigation capabilities on robots is artificial intelligence. Navigation capabilities using artificial intelligence may be associated with the ability to accept input from a range of sensors. However, inputs from the environment are uncertain so that a simple modeling is not sufficiently representative. Fuzzy logic is expected to overcome these uncertainties. This research aims to develop the navigation system on a fire-fighter robot using wall following algorithms and fuzzy logic. The system is simulated on KRPAI 2013 environment where the robot is expected to move by following the wall, extinguishing the fire, and returning to home. It is shown that the robot has successfully completed the mission on KRPAI 2013 with a success rate of 87.5%.
Skripsi
sebagai salah satu syarat untuk memperoleh gelar Sarjana Komputer
pada
Departemen Ilmu Komputer
SISTEM NAVIGASI PADA ROBOT PEMADAM API
MENGGUNAKAN WALL FOLLOWING
DAN LOGIKA FUZZY
ERWIN MUSA YULIO CHRISWANTORO
DEPARTEMEN ILMU KOMPUTER
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT PERTANIAN BOGOR
Judul Skripsi : Sistem Navigasi pada Robot Pemadam Api Menggunakan Wall Following dan Logika Fuzzy
Nama : Erwin Musa Yulio Chriswantoro NIM : G64090046
Disetujui oleh
Karlisa Priandana, ST MEng Pembimbing I
Mushthofa, SKom MSc Pembimbing II
Diketahui oleh
Dr Ir Agus Buono, MSi MKom Ketua Departemen
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah subhanahu wa ta’ala atas segala karunia-Nya sehingga karya ilmiah ini berhasil diselesaikan. Shalawat dan salam penulis sampaikan kepada Nabi Muhammad shallallahu ‘alaihi wasallam, keluarganya, sahabatnya, serta umatnya hingga akhir zaman. Tema yang dipilih dalam penelitian yang dilaksanakan sejak bulan Oktober 2012 ini ialah kecerdasan buatan, dengan judul Sistem Navigasi pada Robot Pemadam Api Menggunakan
Wall Following dan Logika Fuzzy.
Terima kasih penulis sampaikan kepada ayah, ibu, serta seluruh keluarga atas segala doa dan kasih sayangnya. Terima kasih juga penulis sampaikan kepada Ibu Karlisa Priandana, ST MEng dan Bapak Mushthofa, SKom MSc selaku pembimbing, serta Bapak Dr Heru Sukoco, SSi MT selaku penguji yang telah banyak memberikan saran. Di samping itu, terima kasih penulis sampaikan kepada Rahmatika Dewi yang telah meminjamkan laptop, Wulandari, Nur Muhammad Sidik, Aditya Erlangga, Rini Windyastuti, Rizkia Hanna Amalia, Ariny, Aries Fitriawan, dan Lizza Amini Gumilar yang telah sering menemani, membantu, dan memberi dukungan. Ucapan terima kasih juga disampaikan kepada seluruh teman-teman Ilmu Komputer IPB angkatan 46 yang saling memberikan semangat selama pengerjaan karya ilmiah.
Semoga karya ilmiah ini bermanfaat dan memberikan keberkahan.
Bogor, Juli 2013
DAFTAR ISI
DAFTAR TABEL vi
DAFTAR GAMBAR vi
DAFTAR LAMPIRAN vi
PENDAHULUAN 1
Latar Belakang 1
Perumusan Masalah 1
Tujuan Penelitian 2
Manfaat Penelitian 2
Ruang Lingkup Penelitian 2
METODE 2
Perancangan Navigasi 2
Perancangan Logika Fuzzy 3
Implementasi 4
Pengujian 4
Evaluasi 4
HASIL DAN PEMBAHASAN 5
Perancangan Navigasi 5
Perancangan Logika Fuzzy 6
Implementasi 11
Pengujian 12
Evaluasi 13
SIMPULAN DAN SARAN 13
Simpulan 13
Saran 13
DAFTAR PUSTAKA 14
DAFTAR TABEL
1 Aturan fuzzy untuk right dan left wall following 9
2 Hasil pengujian 13
DAFTAR GAMBAR
1 Alur penelitian 2
2 Konfigurasi ruangan: (a) konfigurasi 1, (b) konfigurasi 2, (c) konfigurasi
3, dan (d) konfigurasi 4 3
3 Lingkungan KRPAI 2013 5
4 Alur sistem navigasi 6
5 Fungsi keanggotaan masukan: (a) samping, (b) serong, dan (c) depan 7
6 Fungsi keanggotaan keluaran 9
7 Implementasi lingkungan KRPAI 2013 12
DAFTAR LAMPIRAN
1 Contoh perhitungan fuzzy 15
PENDAHULUAN
Latar Belakang
Robot merupakan suatu alat yang mampu bergerak pada suatu lingkungan dengan tingkat kemampuan tertentu (Carelli dan Freire 2003). Robot memiliki kemampuan untuk melakukan tugas yang sederhana hingga tugas yang kompleks. Tugas sederhana yang dapat dilakukan robot di antaranya bergerak mengikuti garis, menyelesaikan labirin, dan menari. Sedangkan tugas kompleks yang dapat dilakukan robot di antaranya merakit komponen kendaraan, membersihkan limbah beracun, dan melakukan penyelamatan. Untuk melakukan tugas-tugas tersebut, robot memerlukan sistem navigasi yang baik.
Kecerdasan buatan merupakan salah satu cara untuk memberikan kemampuan navigasi pada robot. Kemampuan navigasi menggunakan kecerdasan buatan dapat dikaitkan dengan kemampuan sensor untuk menerima masukan dari lingkungan (Carelli dan Freire 2003). Masukan dari lingkungan bersifat tidak pasti sehingga pemodelan yang sederhana tidak cukup mewakili. Menurut Peri (2002), pemodelan menggunakan logika fuzzy dapat dijadikan alat untuk menangani ketidakpastian dan representasi pengetahuan.
Dasar operasi dari robot ialah mampu bergerak menelusuri dinding yang tidak diketahui konturnya (Braunstingl et al. 1995). Algoritme yang umum digunakan untuk membuat robot mampu menelusuri dinding adalah wall following. Algoritme ini dapat dikombinasikan dengan logika fuzzy dan digunakan sebagai navigasi.
Penelitian terdahulu yang terkait ialah perancangan dan implementasi logika
fuzzy pada mikrokontroler ATMega16 untuk robot penghindar halangan (Fathurahman 2011). Penelitian tersebut berhasil mengimplementasikan logika
fuzzy pada mikrokontroler ATMega16. Sistem yang dirancang menggunakan mikrokontroler ATMega16 sudah mampu menangani 3 masukan dan 2 keluaran dengan baik dan waktu respon sistem cepat.
Kontes Robot Pemadam Api Indonesia (KRPAI) 2013 adalah salah satu kontes robot pemadam api. Divisi yang dilombakan ialah divisi beroda dan berkaki. Peraturan untuk divisi beroda dan berkaki KRPAI 2013 mengacu pada peraturan yang dikeluarkan oleh Trinity College Fire Fighting Robot Contest 2013 (Dikti 2012). Misi yang harus diselesaikan pada lomba ini ialah menemukan dan mematikan api lilin dalam waktu singkat.
Penelitian ini mengambil topik pembuatan sistem navigasi pada robot pemadam api menggunakan algoritme wall following dan logika fuzzy. Sistem navigasi yang dibuat disimulasikan pada lingkungan KRPAI 2013.
Perumusan Masalah
2
Tujuan Penelitian
Penelitian ini bertujuan mengembangkan sistem navigasi pada robot pemadam api menggunakan algoritme wall following dan logika fuzzy.
Manfaat Penelitian
Penelitian ini diharapkan dapat mengembangkan sistem navigasi yang baik pada robot pemadam api dan mendukung pengembangan robotika di lingkungan Departemen Ilmu Komputer, Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Pertanian Bogor.
Ruang Lingkup Penelitian
Sistem navigasi yang dikembangkan pada penelitian ini dibatasi hanya untuk robot pemadam api. Algoritme yang digunakan ialah wall following yang dikombinasikan dengan logika fuzzy. Lingkungan yang digunakan ialah lingkungan KRPAI 2013. Pengujian sistem menggunakan simulasi. Masukan yang diterima dari sensor sudah berupa jarak antara robot dan objek. Keluaran yang dihasilkan berupa sudut belok yang harus dilakukan robot.
METODE
Metode yang digunakan terdiri atas tahap perancangan navigasi, perancangan logika fuzzy, implementasi, pengujian, dan evaluasi. Alur tahapan penelitian dapat dilihat pada Gambar 1.
Perancangan Navigasi
Navigasi yang dirancang pada penelitian ini dibagi menjadi 3 bagian, yaitu navigasi untuk menelusuri dinding, navigasi untuk menemukan titik api, dan navigasi untuk kembali ke home. Dasar operasi yang digunakan untuk memberikan kemampuan navigasi ialah wall following. Wall following untuk menelusuri dinding dikombinasikan dengan logika fuzzy untuk mengatasi ketidakpastian lingkungan. Dinding yang ditelusur ialah dinding pada lingkungan KRPAI 2013. Lingkungan
Gambar 1 Alur penelitian Evaluasi
Pengujian Implementasi Perancangan Logika Fuzzy
3 KRPAI 2013 memiliki 4 konfigurasi ruangan yang berbeda. Konfigurasi tersebut diatur dengan mengubah posisi pintu pada ruangan 1 dan ruangan 4. Setiap pintu memiliki penanda berupa garis. Posisi home berada di lorong bagian atas dengan penanda garis berbentuk lingkaran yang di dalamnya terdapat huruf H. Secara detail konfigurasi ruangan pada lingkungan KRPAI 2013 dapat dilihat pada Gambar 2.
Perancangan Logika Fuzzy
Logika fuzzy digunakan untuk merepresentasikan informasi jarak yang bersifat linguistik seperti dekat, sedang, dan jauh. Perancangan proses pada logika
fuzzy secara umum dapat dibagi menjadi tiga tahap, yaitu fuzzifikasi, evaluasi aturan, dan defuzzifikasi (Obe dan Dumitrache 2010).
Fuzzifikasi mengubah nilai masukan ke dalam nilai fuzzy menggunakan fungsi keanggotaan. Fungsi keanggotaan yang digunakan pada penelitian ini ialah fungsi segitiga dan trapesium. Kedua fungsi tersebut digunakan karena perumusan matematika yang sederhana. Fungsi segitiga terdiri atas 3 parameter, yaitu a, b, dan
c, sedangkan trapesium terdiri atas 4 parameter, yaitu a, b, c, dan d. Formula matematika untuk fungsi segitiga ialah sebagai berikut:
segitiga(x;a,b,c)=
{
0, x ≤ a x-a
b-a, a≤x≤b c-x
c-b, b≤x≤c 0, c≤x }
(1) sedangkan formula matematika untuk fungsi trapesium ialah sebagai berikut:
4
Evaluasi aturan merupakan tahapan untuk mengolah nilai fuzzy berdasarkan aturan yang dibuat. Aturan direpresentasikan dalam bentuk if-then. Setiap kondisi di dalam aturan dihubungkan dengan operator AND karena semua kondisi harus terpenuhi.
Defuzzifikasi menerjemahkan nilai fuzzy ke dalam nilai keluaran yang diskret. Sebelum defuzzifikasi, dilakukan tahap pengumpulan hasil dari evaluasi aturan menggunakan operator OR. Tahapan pengumpulan ini dinamakan agregasi. Metode yang digunakan pada tahap defuzzifikasi untuk menerjemahkan adalah center of gravity (COG). Formula dari COG seperti berikut (Peri 2002):
COG = ∑nkμA(zk)zk
∑nkμA(zk)
(3) dengan μA(zk) adalah keluaran hasil implikasi fungsi keanggotaan dan zk adalah nilai keluaran anggota.
Implementasi
Sistem navigasi yang telah dirancang diimplementasikan menggunakan perangkat lunak MobotSim. MobotSim adalah perangkat lunak simulasi 2 dimensi untuk mobile robot. MobotSim memiliki BASIC editor untuk melakukan pemrograman dengan bahasa pemrograman BASIC.
Pengujian
Pengujian dilakukan dengan menjalankan simulasi pada perangkat lunak MobotSim. Simulasi tersebut dilakukan pada lingkungan KRPAI 2013. Simulasi terdiri atas 1 posisi home, 4 konfigurasi ruangan, dan 4 posisi api, sehingga membutuhkan 16 simulasi. Robot dikatakan berhasil menyelesaikan misi jika dapat memadamkan api dan kembali ke home.
Evaluasi
5
HASIL DAN PEMBAHASAN
Perancangan Navigasi
Navigasi yang diperlukan untuk menyelesaikan misi pada lingkungan KRPAI 2013 adalah navigasi untuk menelusuri dinding, navigasi untuk menemukan titik api, dan navigasi untuk kembali ke home. Contoh lingkungan KRPAI 2013 dapat dilihat pada Gambar 3.
Navigasi untuk menelusuri dinding dikombinasikan dengan logika fuzzy. Navigasi ini dapat membuat robot bergerak menelusuri dinding tanpa menabrak. Navigasi ini aktif saat pertama kali robot dihidupkan. Robot bergerak dari home
dengan menelusuri dinding untuk menemukan titik api. Selama menelusuri dinding, robot mencatat banyaknya ruangan yang sudah dikunjungi dengan mendeteksi garis pada setiap pintu ruangan. Hal ini dilakukan untuk mengatasi masalah mengunjungi ruangan yang berada di tengah. Ruangan di tengah dikunjungi ketika robot sudah mengunjungi 3 ruangan. Ruangan tersebut dikunjungi dengan mengganti tipe dari
right wall following menjadi left wall following. Untuk mengganti tipe wall following tersebut diperlukan ketepatan. Posisi ruangan yang di tengah dikelilingi oleh banyak lorong panjang sehingga kondisi tersebut dapat dijadikan syarat untuk mengganti tipe wall following.
Titik api pada lingkungan KRPAI 2013 terdapat di salah satu ruangan. Ketika robot bergerak menelusuri dinding dan robot menemukan titik api, robot berhenti untuk menyesuaikan posisi. Saat posisi sudah tepat, robot memadamkan api. Setelah memadamkan api, robot harus kembali ke home.
Robot memiliki beberapa cara untuk kembali ke home. Cara pertama ialah setelah robot mengunjungi semua ruangan namun tidak menemukan titik api. Pada kondisi ini robot hanya perlu menelusuri dinding hingga mendeteksi garis home. Cara kedua ialah setelah memadamkan api, robot berbalik arah dan mengganti tipe
wall following. Robot menelusuri jalur yang telah dilewati sebelumnya hingga mendeteksi garis home. Sebagai alternatif dari mendeteksi garis, robot juga selalu mencatat posisinya terhadap home menggunakan sistem kompas. Ketika posisi robot (0,0) terhadap home, robot dinyatakan berada di home.
6
Semua navigasi yang dirancang memiliki keterkaitan sehingga pembagian navigasi menjadi 3 bagian hanya untuk mempermudah pemahaman dan implementasi sistem. Alur keseluruhan dari navigasi dapat dilihat pada Gambar 4.
Perancangan Logika Fuzzy
Proses fuzzifikasi mengubah nilai masukan menjadi nilai fuzzy. Nilai masukan didapat dari pembacaan sensor jarak pada robot dalam satuan sentimeter. Nilai masukan tersebut diproses oleh fungsi keanggotaan. Fungsi masukan terdiri atas 3 variabel, yaitu sensor samping, serong, dan depan. Untuk variabel sensor samping dan serong yang aktif ditentukan oleh tipe wall following. Apabila menggunakan right wall following, maka sensor samping dan serong yang dimaksud ialah sensor samping kanan dan serong kanan. Begitu juga sebaliknya, hal tersebut berlaku pada left wall following.
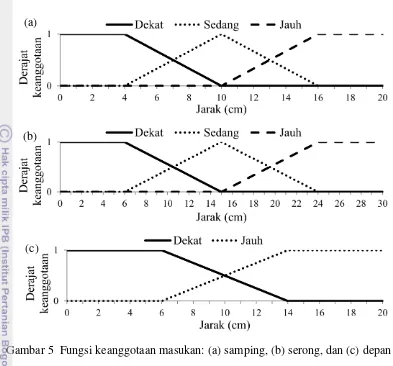
Variabel sensor samping dan serong memiliki 3 fungsi keanggotaan, yaitu dekat, sedang, dan jauh. Variabel sensor depan memiliki 2 fungsi keanggotaan, yaitu dekat dan jauh. Sensor depan hanya memiliki 2 fungsi keanggotaan karena arah depan tidak dijadikan acuan robot untuk menjaga jarak dengan dinding, sedangkan arah samping dijadikan acuan oleh robot untuk tetap mempertahankan jarak dengan dinding. Fungsi keanggotaan untuk masing-masing variabel dapat dilihat pada Gambar 5. Perbedaan fungsi keanggotaan antara sensor samping dan serong hanya terletak pada rentang nilai masing-masing anggota. Sensor serong memiliki rentang nilai anggota yang lebih besar dibandingkan sensor samping karena jarak yang dibaca sensor serong lebih besar. Berdasarkan Persamaan 1 dan 2, formula matematika untuk sensor samping ialah sebagai berikut:
Gambar 4 Alur sistem navigasi Ya
7
μsam_dekat(x)={
1, x≤4 10-x
6 , 4≤x≤10 0, x≥10
} μsam_sedang(x)=
{
0, x≤4 x-4
6 , 4≤x≤10 16-x
6 , 10≤x≤16
0, x≥16 }
μsam_jauh(x)={
0, x≤10 x-10
6 , 10≤x≤16 1, x≥16
}
dengan x adalah nilai anggota, µsam_dekat(x) adalah derajat keanggotaan dekat,
µsam_sedang(x) adalah derajat keanggotaan sedang, dan µsam_jauh(x) adalah derajat
keanggotaan jauh pada sensor samping. Formula matematika untuk sensor serong ialah sebagai berikut:
Gambar 5 Fungsi keanggotaan masukan: (a) samping, (b) serong, dan (c) depan (a)
(b)
8
keanggotaan jauh pada sensor serong. Formula matematika untuk sensor depan ialah sebagai berikut: µdep_jauh(x) adalah derajat keanggotaan jauh pada sensor depan.
Berikut diberikan contoh kasus. Misalkan nilai jarak yang dibaca oleh sensor samping sebesar 7 cm, sensor serong sebesar 13 cm, dan sensor depan sebesar 17 cm. Proses fuzzifikasi pada sensor samping, nilai jarak dimasukan ke dalam fungsi keanggotaan pada tiap-tiap himpunan, antara lain:
Himpunan dekat, µsam_dekat(7) = 10 - 76 = 0.50 Himpunan sedang, µsam_sedang(7) = 7 - 46 = 0.50
Himpunan jauh, µsam_jauh(7) = 0
Aturan fuzzy yang digunakan pada robot pemadam api sebanyak 36 aturan. Aturan-aturan tersebut dibagi menjadi 2 bagian, yaitu 18 aturan right wall following
dan 18 aturan left wall following. Aturan-aturan tersebut dapat dilihat pada Tabel 1. Sesuai dengan contoh kasus yang diberikan sebelumnya, terdapat 4 aturan yang sesuai dengan nilai masukan, yaitu aturan ke-2, aturan ke-4, aturan ke-8, dan aturan ke-10. Pada tahap evaluasi aturan, diketahui anggota dari keluaran berdasarkan aturan yang dibuat. Pada contoh kasus ini, tipe wall following yang digunakan ialah right wall following sehingga hasil aturan ke-2 ialah kiri0, hasil aturan ke-4 ialah maju, hasil aturan ke-8 ialah kiri0, dan hasil aturan ke-10 ialah maju. Berikut contoh perhitungan pada aturan ke-2:
µa2(x) = min(µsam_dekat(7), µser_dekat(13), µdep_jauh(17)) µa2(x) = min(0.50, 0.22, 1.00)
µa2(x) = 0.22
9
Nilai fuzzy hasil evaluasi aturan merupakan nilai fuzzy untuk keluaran. Untuk mendapatkan nilai keluaran yang bersifat diskret diperlukan fungsi keanggotaan keluaran. Fungsi keluaran terdiri atas 1 variabel dan 5 fungsi keanggotaan, yaitu kiri1, kiri0, maju, kanan0, kanan1. Fungsi keanggotaan keluaran dapat dilihat pada Gambar 6. Variabel sudut pada fungsi keluaran memiliki rentang nilai dari -90 hingga 90. Rentang tersebut direpresentasikan dalam satuan derajat. Tanda minus (-) menyatakan arah kiri. Sebagai contoh, nilai -60 menyatakan robot harus belok kiri sebesar 60 derajat. Formula matematika untuk keluaran sudut ialah sebagai berikut:
Tabel 1 Aturan fuzzy untuk right dan left wall following
No Masukan sensor Keluaran wall following
Samping Serong Depan Right Left
1 Dekat Dekat Dekat Kiri1 Kanan1
Gambar 6 Fungsi keanggotaan keluaran
0
10 keanggotaan kanan1 pada variabel sudut.
Perhitungan untuk mendapatkan nilai x ketika µa2(x) = 0.22 berdasarkan contoh kasus yang diberikan sebelumnya ialah sebagai berikut:
µa2(x) = µkiri0(x) = 0.22
x + 60
30 = 0.22, sehingga x1 = -53.40; atau - x
30 = 0.22, sehingga x2 = -6.60
Nilai keluaran hasil evaluasi semua aturan dikumpulkan. Pengumpulan nilai ini menjadikan variabel keluaran samar sehingga diperlukan tahapan untuk mengubah nilai samar menjadi nilai tegas. tahapan ini disebut defuzzifikasi. Jika contoh kasus sebelumnya dihitung lebih lanjut, setelah hasil evaluasi aturan didapat formula matematika sebagai berikut:
11 dengan x adalah nilai anggota dan µd(x) adalah nilai derajat keanggotaan hasil agregasi.
Formula di atas didefuzzifikasi menggunakan COG. Berdasarkan Persamaan 3, proses perhitungan defuzzifikasi ialah sebagai berikut:
COG = ∑nkμd(xk)xk
Nilai hasil defuzzifikasi menggunakan COG merupakan nilai keluaran dari keseluruhan proses fuzzy. Nilai keluaran ini merupakan sudut belok yang harus dilakukan robot dalam satuan derajat. Berdasarkan contoh perhitungan, robot harus belok ke kiri sebesar 16.09 derajat. Contoh perhitungan fuzzy secara lengkap dapat dilihat pada Lampiran 1.
Implementasi
Rancangan navigasi diprogram menggunakan perangkat lunak MobotSim. Perangkat lunak tersebut memiliki BASIC editor sehingga memudahkan pemrograman bahasa BASIC. Perangkat lunak tersebut memang didesain khusus untuk simulasi 2 dimensi.
MobotSim menyediakan pengaturan robot sehingga simulasi dapat mendekati kondisi sebenarnya. Pada bagian general, robot yang digunakan pada penelitian ini memiliki indeks 0. Indeks tersebut berguna untuk mengidentifikasi robot yang dimaksud dalam kode program. Posisi awal robot terletak pada koordinat x = 2.9 dan y= 2.2 dengan theta = 270˚. Untuk grid resolution, draw sensor ranging, dan
draw trajectory, diatur sesuai kebutuhan simulasi. Pada bagian geometry, platform diameter = 0.25 meter, distance between wheels = 0.2 meter, wheels diameter = 0.1 meter, wheels width = 0.01 meter, number of ranging sensors = 5, angle between sensors = 45˚, dan sensors ring radius = 0.1 meter. Pada bagian ranging sensors,
radiation cone= 40˚, range dari 0 sampai 3 meter, dan percentage of misreadings
12
range sensor akan dianggap minus (-). Hal tersebut dapat menyebabkan logic error
karena pada umumnya nilai jarak yang melebihi range sensor akan dianggap sangat besar.
Desain ruangan dibuat sesuai dengan lingkungan KRPAI 2013. Ada 4 ruangan yang digunakan dengan 4 kemungkinan konfigurasi ruangan. Posisi pintu yang dapat dikonfigurasi hanya pada ruangan 1 dan 4. Setiap pintu diberi penanda berupa lingkaran bewarna kuning dengan tanda silang di tengahnya. Penanda ini sudah disediakan oleh MobotSim. Posisi home dan posisi api juga diberikan penanda yang sama. Penanda yang sama digunakan karena MobotSim tidak mendukung bentuk dan warna penanda yang lain. Oleh karena itu, setiap penanda memiliki identitas yang unik. Home diberikan identitas 0, penanda pintu pada ruangan 3 diberikan identitas 1, penanda pintu pada ruangan 2 diberikan identitas 2, 2 penanda pintu pada ruangan 1 diberikan identitas 3 dan 4, penanda pintu pada ruangan 4 diberikan identitas 5, dan api diberikan identitas 6. Implementasi lingkungan KRPAI 2013 pada MobotSim dapat dilihat pada Gambar 7.
MobotSim hanya menyediakan sensor jarak sehingga pembacaan posisi home, garis pada pintu ruangan, dan api menggunakan koordinat. Posisi ketiga objek tersebut dibaca dengan menghitung jarak objek dan robot. Posisi home dan garis pada pintu ruangan yang dibaca menggunakan koordinat, masih dapat disimulasikan dengan baik meskipun seharusnya dibaca menggunakan sensor garis. Posisi api yang dibaca menggunakan koordinat kurang dapat disimulasikan dengan baik karena sifat sensor api yang lebih kompleks dibandingkan sensor garis.
Pengujian
Pengujian dilakukan dengan menjalankan simulasi pada perangkat lunak MobotSim. Simulasi tersebut dilakukan pada lingkungan KRPAI 2013. Simulasi dilakukan sebanyak 16 simulasi yang terdiri atas 1 posisi home, 4 konfigurasi
Gambar 7 Implementasi lingkungan KRPAI 2013
13
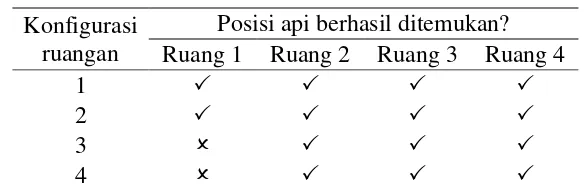
ruangan, dan 4 posisi api. Posisi home berada di lorong bagian atas di dekat ruang 3 dan ruang 4. Posisi api di dalam ruangan diletakan secara acak sehingga diambil rata-rata dari keseluruhan percobaan. Hasil pengujian sistem navigasi robot dapat dilihat pada Tabel 2. Dari tabel tersebut diketahui bahwa robot tidak berhasil memadamkan api di ruang 1 pada konfigurasi ruangan 3 dan 4. Potongan gambar dari 16 simulasi dapat dilihat pada Lampiran 2.
Evaluasi
Sistem navigasi robot berhasil memadamkan api di ruang 2, ruang 3, dan ruang 4 pada semua konfigurasi ruangan dan kembali ke home. Robot berhasil memadamkan api di ruang 1 untuk konfigurasi ruangan 1 dan 2, sedangkan konfigurasi ruangan 3 dan 4, robot tidak berhasil memadamkan api. Ruang 1 pada konfigurasi ruangan 3 dan 4 memiliki pintu masuk bersebelahan dengan dinding luar sehingga algoritme right wall following membuat robot hanya menelusuri dinding tersebut tanpa mendeteksi api yang berada di siku dinding dalam. Posisi api pada simulasi yang dibaca menggunakan koordinat juga menyebabkan api tidak terdeteksi. Api dapat terdeteksi hanya jika posisi api berada di jalur pergerakan robot. Dengan demikian, persentase keberhasilan robot dalam menyelesaikan misi KRPAI 2013 ialah sebesar 14/16 atau 87.5%.
SIMPULAN DAN SARAN
Simpulan
Penelitian ini telah berhasil mengembangkan sistem navigasi robot pemadam api menggunakan algoritme wall following dan logika fuzzy. Sistem tersebut berhasil menyelesaikan misi pada KRPAI 2013 dengan posisi home berada di lorong, 4 konfigurasi ruangan, dan 4 posisi api di dalam ruangan yang berbeda. Hasil pengujian menunjukan bahwa persentase keberhasilan robot dalam menelusuri ruangan, memadamkan api, dan kembali ke home ialah 87.5%.
Saran
Sebagai bahan acuan untuk pengembangan selanjutnya, sistem navigasi dapat diimplementasikan ke robot. Pengubahan aturan fuzzy dapat terjadi karena perbedaan antara simulasi dan lingkungan yang sebenarnya. Diharapkan apabila
Tabel 2 Hasil pengujian Konfigurasi
ruangan
Posisi api berhasil ditemukan? Ruang 1 Ruang 2 Ruang 3 Ruang 4
1
2
3
14
sistem navigasi diterapkan ke robot, sensor api yang dimiliki robot dapat mendeteksi keberadaan api pada kondisi tanpa halangan, sehingga persentase keberhasilan akan meningkat.
DAFTAR PUSTAKA
Braunstingl R, Sanz P, Ezkerra JM. 1995. Fuzzy logic wall following of a mobile robot based on the concept of general perception. Di dalam: Seventh International Conference on Advanced Robotics; 1995 Sep; Sant Feliu De Guixols, Spanyol. Barcelona (ES): UPC. 367-376.
Carelli R, Freire EO. 2003. Corridor navigation and wall-following stable control for sonar-based mobile robots. Robotics and Autonomous Systems. 45:235-247. doi:10.1016/j.robot.2003.09.005.
[Dikti] Direktorat Pendidikan Tinggi. 2012. Panduan Kontes Robot Pemadam Api Indonesia (KRPAI) Beroda dan Berkaki 2013. Jakarta: Direktorat Pendidikan Tinggi.
Fathurahman F. 2011. Rancangan dan implementasi logika fuzzy pada mikrokontroler ATMega16 untuk robot penghindar halangan [skripsi]. Bogor (ID): Institut Pertanian Bogor.
Obe O, Dumitrache I. 2010. Fuzzy control of autonomous mobile robot. UPB Sci Bull. 72:173-186.
15 Lampiran 1 Contoh perhitungan fuzzy
1. Fuzzifikasi
Sensor samping = 7 cm Sensor serong = 13 cm Sensor depan = 17 cm
Jika sensor samping membaca jarak sebesar 7 cm, nilai derajat keanggotaan pada tiap-tiap himpunan adalah:
Himpunan dekat, µsam_dekat(7) = 10 - 7
6 = 0.50
Himpunan sedang, µsam_sedang(7) = 7 - 46 = 0.50 Himpunan jauh, µsam_jauh(7) = 0
Jika sensor serong membaca jarak sebesar 13 cm, nilai derajat keanggotaan pada tiap-tiap himpunan adalah:
Himpunan dekat, µser_dekat(13) = 15 - 139 = 0.22
Himpunan sedang, µser_sedang(13) = 13 - 69 = 0.78 Himpunan jauh, µser_jauh(13) = 0
Jika sensor depan membaca jarak sebesar 17 cm, nilai derajat keanggotaan pada tiap-tiap himpunan adalah:
Himpunan dekat, µdep_dekat(17) = 0
Operator yang digunakan pada proses ini ialah AND, sehingga:
µa2(x) = min(µsam_dekat(7), µser_dekat(13), µdep_jauh(17)) µa2(x) = min(0.50, 0.22, 1.00)
µa2(x) = 0.22 Aturan ke-4
If (Samping is Dekat) and (Serong is Sedang) and (Depan is Jauh) then (Sudut is Maju)
Operator yang digunakan pada proses ini adalah AND, sehingga:
µa4(x) = min(µsam_dekat(7), µser_sedang(13), µdep_jauh(17)) µa4(x) = min(0.50, 0.78, 1.00)
µa4(x) = 0.50 Aturan ke-8
16
Lampiran 1 Lanjutan
Operator yang digunakan pada proses ini adalah AND, sehingga:
µa8(x) = min(µsam_sedang(7), µser_dekat(13), µdep_jauh(17))
µa8(x) = min(0.50, 0.22, 1.00)
µa8(x) = 0.22
Aturan ke-10
If (Samping is Sedang) and (Serong is Sedang) and (Depan is Jauh) then (Sudut is Maju)
Operator yang digunakan pada proses ini adalah AND, sehingga:
µa10(x) = min(µsam_sedang(7), µser_sedang(13), µdep_jauh(17)) µa10(x) = min(0.50, 0.78, 1.00)
µa10(x) = 0.50
Operasi Implikasi dari masukan ke keluaran
Aturan ke-2
Sehingga formula matematika kiri0 yang baru ialah sebagai berikut:
µkiri0(x) =
17 Lampiran 1 Lanjutan
µmaju(x) =
Sehingga formula matematika kiri0 yang baru ialah sebagai berikut:
µkiri0(x) =
Sehingga formula matematika maju yang baru ialah sebagai berikut:
µmaju(x) =
Operator yang digunakan dalam proses agregasi ialah OR, sehingga:
µd(x) = max(µkiri0(x), µmaju(x), µkiri0(x), µmaju(x))
18
Lampiran 1 Lanjutan
µd(x) =
{
0, x ≤ -60
x + 60
30 , -60 ≤ x ≤ -53.4 0.22, -53.4 ≤ x ≤ -11.7
x + 15
15 , -11.7 ≤ x ≤ -7.5 0.50, -7.5 ≤ x ≤ 7.5
15 - x
15 , 7.5 ≤ x ≤ 15
0, x ≥ 15 }
3. Deffuzifikasi
Persamaan yang digunakan ialah Center of Gravity (COG)
COG = ∑nkμd(xk)xk
∑nkμd(xk)
= ∑90k=-90μd(xk)xk
∑90k=-90μd(xk)
= µd(x- ).(x-90µ) + µd(x- ).(x-89) + µd(x- ).(x-88) + … + µd(x90).(x90) d(x- ) + µd(x- ) + µd(x- ) + … + µd(x )
= 0 + 0 + 0 + … + 0 0 + 0 + 0 + … + 0
19 Lampiran 1 Lanjutan
0
20
Lampiran 2 Simulasi sistem navigasi Implementasi Ruangan
Konfigurasi Ruangan
(a) Konfigurasi ruangan 1 (b) Konfigurasi ruangan 2 (c) Konfigurasi ruangan 3 (d) Konfigurasi ruangan 4
home
id = 0
garis id = 1
garis id = 2
garis id = 3
garis id = 4 garis
id = 5 api
id = 6
21 Lampiran 2 Lanjutan
Konfigurasi ruangan 1 dan posisi api pada ruang 1 dan ruang 2
22
Lampiran 2 Lanjutan
Konfigurasi ruangan 2 dan posisi api pada ruang 1 dan ruang 2
23 Lampiran 2 Lanjutan
Konfigurasi ruangan 3 dan posisi api pada ruang 1 dan ruang 2
24
Lampiran 2 Lanjutan
Konfigurasi ruangan 4 dan posisi api pada ruang 1 dan ruang 2
25
RIWAYAT HIDUP
Penulis dilahirkan di Semarang, Jawa Tengah pada tanggal 13 Juli 1991 dari ayah bernama Kuswantoro dan ibu bernama Christiana. Penulis merupakan anak kedua dari 4 bersaudara. Pada tahun 2009, penulis menamatkan pendidikan di SMA Negeri 2 Bogor. Penulis lulus seleksi masuk Institut Pertanian Bogor (IPB) pada tahun 2009 melalui jalur Undangan Seleksi Masuk IPB (USMI) di Departemen Ilmu Komputer, Fakultas Matematika dan Ilmu Pengetahuan Alam.