PENERAPAN FOTODIODA FILM Ba
0.5Sr
0.5TiO
3(BST)
SEBAGAI DETEKTOR GARIS PADA ROBOT LINE
FOLLOWER BERBASIS MIKROKONTROLLER
ATMEGA8535
ADE KURNIAWAN
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
ABSTRAK
ADE KURNIAWAN. Penerapan Fotodioda Film Ba0.5Sr0.5Tio3 (BST) sebagai Detektor Garis pada
Robot Line Follower Berbasis Mikrokontroler Atmega8535. Dibimbing oleh: Dr. IRZAMAN dan ARDIAN ARIF, M.Si.
Pada penelitian ini telah dilakukan pembuatan robot line follower dengan fotodioda film Ba0,5Sr0,5TiO3 (BST) sebagai detektor garisnya. Film BST dapat menghasilkan arus listrik jika
dikenai cahaya yang mengakibatkan konduktifitas film berubah. Konduktifitas film akan meningkat, dengan meningkatnya intensitas cahaya yang masuk. Sebagai pengendali robot, digunakan mikrokontroler Atmega8535. Inputan pada mikrokontroler adalah perubahan tegangan jatuh pada film akibat perubahan intensitas cahaya. Perubahan tegangan jatuh sangat kecil sehingga perlu diperkuat oleh rangkaian penguat operasional. Mikrokontroler memberikan instruksi kepada kedua motor sebagai respon terhadap input yang diberikan. Sebelum diaplikasikan sebagai detektor garis, film diuji dengan variasi warna sumber cahaya dan bidang pantul. Film BST memiliki daerah serapan pada panjang gelombang cahaya tampak sehingga pada penelitian ini digunakan lampu LED sebagai sumber cahaya. Robot pada penelitian ini menggunakan film yang diproses annealing selama 29 jam karena memiliki sensitivitas tertinggi. Sebagai sumber cahaya digunakan LED berwarna biru karena memiliki kontras yang tinggi untuk membedakan bidang berwarna gelap dan terang
PENERAPAN FOTODIODA FILM Ba
0.5Sr
0.5TiO
3(BST) SEBAGAI
DETEKTOR GARIS PADA ROBOT
LINE FOLLOWER
BERBASIS
MIKROKONTROLER ATMEGA8535
ADE KURNIAWAN
Skripsi
sebagai salah satu syarat untuk memperoleh gelar
Sarjana Sains pada
Departemen Fisika
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
Judul Skripsi : Penerapan fotodioda film Ba0.5Sr0.5Tio3 (BST) sebagai detektor garis pada
robot
line follower
berbasis mikrokontroler Atmega8535
Nama
: Ade Kurniawan
NIM
: G74070059
Disetujui:
Pembimbing 1
Pembimbing 2
Dr. Ir. Irzaman, M.Si
NIP. 19630708 199512 1001
Ardian Arif, M.Si
NIP. 19720311 200604 1011
Diketahui :
Ketua Departemen Fisika
Dr. Ir. Irzaman, M.Si
NIP. 19630708 199512 1001
KATA PENGANTAR
Puji syukur penulis panjatkan atas kehadirat Tuhan Yang Maha Esa atas segala anugrah dan rahmat-nya kepada penulis sehingga dapat menyelesaikan skripsi yang berjudul Penerapan Fotodioda Film Ba0.5Sr0.5TiO3 (BST) sebagai Detektor Garis pada Robot Line Follower Berbasis
Mikrokontroler AtMega8535. Penulisan ini diharapkan dapat menjadi sumbangan pemikiran yang nantinya dapat terus dikembangkan bagi perkembangan teknologi di Indonesia pada masa mendatang. Seiring dengan terselesaikan skripsi ini, penulis ingin mengucapkan terima kasih yang tak terhingga kepada:
1. Kedua orang tua yang selalu memotivasi dan memberi arahan bagi penulis, serta menjadi sumber kekuatan agar tetap maju.
2. Bapak, Dr. Irzaman selaku pembimbing utama yang selalu memotivasi dan mendukung untuk setiap ide dan kreativitas yang muncul pada penelitian ini
3. Bapak Ardian Arif, M. Si selaku pembimbing kedua yang telah memberikan arahan dan bimbingannya untuk menyelesaikan skripsi ini.
4. Bapak Abdul Jamil, M. Si dan ibu Mersi Kurniati, M.Si selaku penguji yang telah memberikan masukan dan saran dalam perbaikan dan penyelesaian skripsi ini.
5. Drs. M. Nur Indro, M.Sc atas revisi dan masukan dalam penulisan skripsi ini.
6. Orang-orang yang selalu memberikan dukungan dan motivasi. Tim peneliti Barium Strontium Titanate(BST), Johan, Dani dan Hilal. Dan teman-teman seperjuangan fisika 44.
7. Bapak Warya di Laboratorium MOCVD, Laboratorium Fisika Material Elektronik Institut Tekhnologi Bandung, yang sudah membantu dalam proses metalisasi.
8. Dosen dan Staff Departemen Fisika FMIPA IPB yang membantu secara langsung dan tidak langsung, serta dalam teknis pelaksanaan penelitian.
9. Semua pihak yang membantu pelaksanaan penelitian ini, yang tak dapat dituliskan satu per satu pada halaman ini.
Akhir kata, semoga skripsi ini dapat memberikan manfaat untuk kita semua. Penulis juga menyadari bahwa skripsi ini masih jauh dari sempurna sehingga kritik dan saran yang membangun sangat penulis harapkan bagi kemajuan aplikasi material yang dikembangkan ini. Semoga Allah SWT senantiasa melimpahkan rahmat dan karunia-Nya untuk kita semua. Amin.
Bogor, Oktober 2011
RIWAYAT HIDUP
DAFTAR ISI
Halaman
ABSTRAK ... i
KATA PENGANTAR ... iv
RIWAYAT HIDUP ... v
DAFTAR ISI ... vi
DAFTAR TABEL ... vii
DAFTAR GAMBAR ... vii
DAFTAR LAMPIRAN ... vii
BAB 1. PENDAHULUAN ... 8
1.1. Latar Belakang ... 8
1.2. Tujuan Penelitian ... 8
1.3. Perumusan Masalah ... 8
1.4. Hipotesis ... 8
BAB 2. TINJAUAN PUSTAKA... 8
2.1. Barium Stronsium Titanat (BST) ... 8
2.2. Mikrokontroler... 9
2.3. Sensor Garis ... 10
2.4. Op-amp ... 10
2.5. Driver motor DC ... 11
BAB 3. METODOLOGI PENELITIAN ... 11
3.1. Tempat dan Waktu Penelitian ... 11
3.2. Alat dan Bahan ... 11
3.3. Prosedur Penelitian ... 11
3.3.1. Pembuatan badan dan rangka robot ... 11
3.3.2. Pembuatan Komponan Elektronika ... 12
3.3.3. Pembuatan film BST ... 13
3.3.4. Pemrograman ... 13
BAB 4. HASIL DAN PEMBAHASAN ... 13
4.1. Pembuatan Film BST ... 13
4.2. Uji Sensitivitas Film BST ... 13
4.3. Rancangan Film BST Sebagai Sensor Garis ... 14
4.5. Rangkaian Pengendali Sistem ... 19
4.6. Pengujian ... 19
BAB 5. KESIMPULAN DAN SARAN ... 21
5.1. Kesimpulan ... 21
5.2. Saran ... 21
DAFTAR PUSTAKA ... 21
DAFTAR TABEL
Halaman
Tabel 4.1. Hasil pengujian sensitivitas film BST ... 13
Tabel 4.2. Tabel warna dan panjang gelombang cahaya tampak ... 16
Tabel 4.3. Hasil pengujian film BST pada bidang pantul dengan warna LED putih ... 17
Tabel 4.4. Hasil pengujian film BST pada bidang pantul dengan warna LED merah ... 17
Tabel 4.5. Hasil pengujian film BST pada bidang pantul dengan warna LED biru ... 17
Tabel 4.5. Hasil pengujian film BST pada bidang pantul dengan warna LED hijau ... 18
Tabel 4.7. Hasil pengujian input pada driver motor dan arah pergerakan motor ... 19
Tabel 4.8. Hasil pengujian fungsional sensor ... 20
Tabel 4.9. Hasil pengujian fungsional robot dengan variasi sudut tikungan. ... 21
DAFTAR GAMBAR
Halaman Gambar 2.1. Konfigurasi Pin AtMega8535 ... 9Gambar 2.2. Hubungan keluaran fotodioda dengan intensitas cahaya ... 10
Gambar 2.3. Ilustrasi mekanisme sensor garir ... 10
Gambar 2.4. Op-amp Inverting ... 11
Gambar 2.5. Op-amp Non Inverting ... 11
Gambar 2.6. Konfigurasi pin IC L293D ... 11
Gambar 3.1. Diagram alur penelitian ... 12
Gambar 4.1. Perubahan tegangan jatuh film BST ... 14
Gambar 4.2. Sensitivitas film BST pada rangkaian bias maju dan mundur ... 14
Gambar 4.3. Skema rangkaian lengkap robot line follower ... 15
Gambar 4.4. Rangkaian penguat ... 15
Gambar 4.5. Ilustrasi prinsip kerja sensor gari ... 16
Gambar 4.6. Tegangan keluaran film 1 (29A) dengan variasi warna LED dan bidang pantul ... 18
Gambar 4.7. Tegangan keluaran film 2 (29B) dengan variasi warna LED dan bidang pantul ... 18
Gambar 4.8. Posisi sensor dan arah pergerakan roda pada robot ketika pada (a) lintasan lurus. (b) Tikungan ke kiri. (c) Tikungan ke Kanan. (d) Keluar lintasan. ... 20
DAFTAR LAMPIRAN
Halaman Lampiran 1. Program robot line follower ... 24BAB 1
PENDAHULUAN
1.1. Latar Belakang
Film Barium Stronsium Titanat (BST) berpotensi sebagai sensor cahaya (fotodioda) dan sensor suhu.1-2 Film BST dapat dibuat dengan beberapa metode diantaranya Pulsed Laser Deposition (PLD), Metal Organic Solution Deposition (MOSD), Sol-antikann Gel Process dan RF Magnetron Sputtering.3 Selain itu juga terdapat Metode Chemical Solution Deposition (CSD) yang telah lama dikembangkan untuk penumbuhan perovskite thin film semenjak tahun 1980-an dan dipublikasikan oleh Fukashima et al.4 Dalam penelitian ini film BST dibuat dengan metode
chemical solution deposition (CSD) karena metode ini memiliki keunggulan yaitu prosedurnya mudah, biayanya relatif murah dan mendapatkan hasil yang bagus.
Robot merupakan sebuah mesin yang
memiliki kecerdasan tertentu untuk
membantu tugas-tugas manusia mengerjakan hal yang kadang sulit atau tidak bisa dilakukan manusia secara langsung. Misalnya untuk menangani material radio aktif, merakit mobil dalam industri perakitan mobil, menjelajah planet mars, sebagai media pertahanan atau perang, dan sebagainya. Line Follower Robot (Robot Pengikut Garis) adalah robot yang dapat berjalan mengikuti sebuah lintasan, ada yang menyebutnya dengan Line Tracker, Line Tracker Robot dan sebagainya. Garis yang dimaksud adalah garis berwarna gelap di atas permukaan berwarna terang atau sebaliknya.
Film BST yang dibuat ini diharapkan menjadi sensor cahaya (fotodioda). Dimana fotodioda ini dapat dikembangkan menjadi detektor garis. Detektor garis memanfaatkan sifat pemantulan cahaya pada bahan. Sebuah bahan disinari dengan cahaya yang kemudian dipantulkan dan ditangkap oleh film BST. Perbedaan warna garis dan bidang ini akan menghasilkan perbedaan intensitas cahaya yang dipantulkan. Jika film BST dikenai
cahaya maka material tersebut akan
menghasikan beda potensial, dimana beda potensial ini berupa beda potensial analog. Beda potensial ini akan dikuatkan dengan penguat tegangan (Op Amp). Sinyal keluaran yang masuk akan diolah Mikrokontroler ATMega8535 menjadi pergerakan robot.
1.2. Tujuan Penelitian
1.Membuat film Ba0.5Sr0.5TiO3 (BST)
sebagai sensor cahaya fotodioda. 2.Merancang sebuah robot line follower
yang berbasiskan pada
mikrokontroler.
3.Mengaplikasikan fotodioda BST
sebagai detektor garis pada robot line follower.
1.3. Perumusan Masalah
Apakah film Ba0.5Sr0.5TiO3 (BST) dapat
dimanfaatkan sebagai detektor garis pada robot line follower ?
1.4. Hipotesis
Film BST memiliki sifat peka terhadap perubahan intensitas cahaya, sehingga dapat dimanfaatkan sebagai detektor garis pada robot line follower.
BAB 2
TINJAUAN PUSTAKA
2.1. Barium Stronsium Titanat (BST)
Barium Stronsium Titanat (BST)
merupakan material ferroelektrik yang
berpotensi untuk dijadikan sensor cahaya. Pembuatan film BST dapat dilakukan dengan beberapa metode, diantaranya adalah pulsed laser deposition (PLD), sol gel process,
dan metode chemical solution deposition
(CSD).5-7 Persamaan reaksi untuk BST ialah :
xBa(CH3COO)2 + 1-xSr(CH3COO)2 +
Ti(C12H28O4)+ 22O2 →
BaxSr1-xTiO3 + 17H2O + 16CO2
Temperatur dimana sifat ferroelekrik bahan dapat bekerja atau temperatur curie
Barium Titanat murni sebesar 130 °C. Dengan penambahan Stronsium, temperatur
curie Barium Titanat menurun menjadi temperatur kamar sehingga bisa diaplikasikan pada suhu kamar.8
9
mengandung lapisan intrinsik antara lapisan n dan p. Cahaya diserap di daerah
persambungan atau daerah intrinsik
menimbulkan pasangan elektron-hole.9
2.2. Mikrokontroler
Mikrokontroler adalah sebuah sistem mikroprosesor lengkap yang dikemas dalam
sebuah chip. Mikrokontroler dapat
menggantikan fungsi komputer dalam
pengendalian kerja. Keuntungan penggunaan mikrokontroler adalah sistem elektronik akan menjadi lebih mudah dan ringkas dan rancang bangun sistem elektronik akan lebih cepat karena sebagian besar dari sistem
adalah perangkat lunak yang mudah
dimodifikasi.10
Mikrokontroler tersusun atas
mikroprosesor dan piranti pendukungnya. Sistem kerjanya diatur berdasarkan program dalam bahasa pemrograman yang digunakan, ada beberapa bahasa pemrograman yang dapat digunakan, pada umumnya semua bahasa pemrograman dapat diaplikasikan ke mikrokontroler, akan tetapi membutuhkan kompiler yang mendukung mikrokontroler tersebut. Bahasa pemrograman yang biasa digunakan dalam memrogram mikrokontroler produksi Atmel adalah bahasa Assembler, bahasa C, C++, Basic, ataupun Turbo pascal.
ATMega8535 merupakan salah satu mikrokontroler 8 bit buatan Atmel untuk keluarga Alv and Vegard’s Risc processor
(AVR). Mikrokontroler keluarga AVR,
menggunakan arsitektur RISC. (Reduced Instruction Set Computing) 8 bit. Pada sistem RISC sebagian besar kode instruksinya dikemas dalam satu siklus clock. instruksi dijalankan, instruksi lain berikutnya akan di-prefetch dari memori program.
ATMega8535 memiliki fitur sebagai berikut:11
1. Sistem mikrokontroler 8 bit berbasis RISC dengan kecepatan maksimal 16 MHz.
2. Memiliki memori flash 8 KB,
SRAM sebesar 512 byte dan
EEPROM (Electrically Erasable
Programmable Read Only Memory) sebesar 512 byte.
3. Memiliki ADC (Pengubah
analog-ke-digital) internal dengan ketelitian 10 bit sebanyak 8 saluran.
4. Memiliki PWM (Pulse Wide
Modulation) internal sebanyak 4 saluran.
5. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5 Mbps.
6. Enam pilihan mode sleep, untuk menghemat penggunaan daya listrik.
Mikrokontroler ATMega8535 juga
memiliki 40 pin, yang dimana setiap pin memiliki fungsi tertentu. Gambar 2.1 adalah
konfigurasi pin pada mikrokontroler
ATMega8535.
Deskripsi pin pada mikrokontroler ATMega8535:12
1. Vcc : pin masukan
sumber tegangan.
2. Ground : pin masukan
ground
3. Port A (PA0..PA7) : pin I/O dua arah dan pin masukan ADC.
4. Port B (PB0..PB7) : pin I/O dua arah dan pin fungsi khusus, yaitu
Timer/ Counter, komparator analog,dan SPI
5. Port C (PC0..PC7) : pin I/O dua arah dan pin fungsi khusus, yaitu TWI,komparator analog dan Timer Oscillator.
6. Port D (PD0..PD7) : pin I/O dua arah dan pin fungsi khusus, yaitu
komparator analog, interupsi
eksternal, dan komunikasi serial
7. RESET : pin untuk
me-reset mikrokontroler.
8. XTAL1 : pin masukan
clock internal dan masukan
inverting Oscillator amplifier
internal
9. XTAL2 : pin keluaran
inverting Oscillator amplifier
10. AVCC : pin masukan
tegangan untuk ADC
11. AREF : pin masukan
tegangan referensi ADC
2.3. Sensor Garis
Sensor garis adalah sensor yang dapat mendeteksi adanya garis atau tidak pada suatu permukaan. Sensor garis sering digunakan pada robot line follower (robot pengikut garis), digunakan juga sebagai pendeteksi objek dengan permukaan
bidang pantul yang kontras. Selain
menggunakan fotodioda dapat juga dirancang dengan menggunakan photo transsistor, infra red, dan masih banyak lainnya.
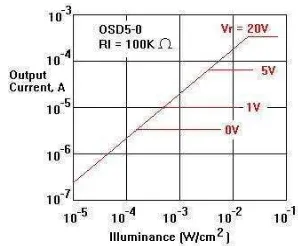
Fotodioda adalah salah satu jenis sensor yang peka terhadap cahaya (photodetector). Fotodioda akan mengalirkan arus yang membentuk fungsi linear terhadap intensitas cahaya yang diterima. Arus ini umumnya teratur terhadap power density (Dp). Perbandingan antara arus keluaran dengan
power density disebut sebagai current responsitivity. Hubungan antara keluaran sensor fotodioda dengan intensitas cahaya yang diterimanya ketika dipanjar mundur adalah membentuk suatu fungsi yang linier.13 Hubungan antara keluaran sensor photodiode
dengan intensitas cahaya ditunjukkan pada Gambar 2.2.
Pada sensor garis LED berfungsi sebagai pengirim cahaya ke garis untuk
dipantulkan lalu dibaca oleh sensor
fotodioda. Sifat dari warna putih (permukaan terang) yang memantulkan cahaya dan warna
hitam (permukaan gelap) yang tidak
memantulkan cahaya digunakan dalam
aplikasi ini.14 Gambar 2.3 adalah ilustrasi mekanisme sensor garis.
Pada sensor garis fotodioda, nilai resistansi akan berkurang bila terkena cahaya dan bekerja pada kondisi reverse bias. Untuk pemberi pantulan cahaya digunakan LED
superbright, komponen ini mempunyai cahaya yang sangat terang, sehingga cukup
untuk mensuplai pantulan cahaya ke
fotodioda.
Gambar 2.2. Hubungan keluaran fotodioda dengan intensitas cahaya.13
Gambar 2.3. Ilustrasi mekanisme sensor garis.14
Saat fotodioda tidak terkena cahaya, maka nilai resistansinya akan besar atau dapat diasumsikan tak hingga. Sehingga tidak ada arus yang mengalir. Saat terkena cahaya, maka fotodioda akan bersifat sebagai sumber tegangan dan nilai resistansinya akan menjadi kecil, sehingga akan ada arus yang mengalir.
2.4. Op-amp
Op-amp adalah rangkaian penguat sinyal (signal amplifier). Op-Amp memiliki 4 jenis penguatan dasar; penguat noninverting,
penguat inverting, penguat penjumlahan dan penguat differensial.15 Berikut ini adalah parameter Op-Amp yang dianggap berlaku ideal; (i) arus masukan, tegangan offset masukan dan impedansi keluaran bernilai nol. (ii) impedansi masukan dan gainnya bernilai tak hingga.16
Pada penguat inverting (Gambar 2.4), sinyal masukan vin, dihubungkan dengan
input minus (-) dan input plus (+) digroundkan. Faktor penguat ditentukan oleh perbandingan hambatan (Rin dan Rf) yang
dipakai.17 sinyal yang masuk akan mengalami pergeseran fasa 1800 pada sinyal keluaran Besarnya faktor penguatannya dapat ditulis sebagai:
11
Atau penguatannya adalah
(2.2)
Pada penguat Non-Inverting (Gambar 2.5) sinyal masukan dihubungkan dalam input plus (+), dan faktor penguat ditentukan oleh perbandingan hambatan yang dipakai.17 Besarnya faktor penguatannya dapat ditulis sebagai:
(2.3)
Atau penguatannya adalah
(2.4)
Gambar 2.4. Op-amp Inverting17
Gambar 2.5. Op-amp Non Inverting17
2.5. Driver motor DC
Motor DC (direct current) adalah alat yang berfungsi mengubah energi listrik menjadi energi mekanik. Motor DC banyak digunakan sebagai penggerak dalam berbagai peralatan. Motor DC berputar sebagai hasil saling interaksi dua medan magnet. Interaksi ini terjadi disebabkan arus yang mengalir pada kumparan.
Arus output dari mikrokontroler sangat kecil dan tidak kuat untuk menggerakan motor. Untuk mengendalikan motor maka diperlukan sebuah rangkaian driver motor.
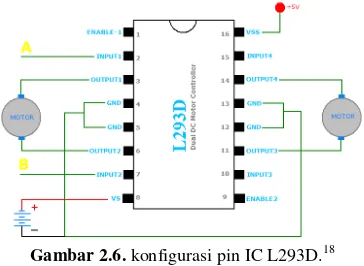
IC L293D merupakan driver motor yang dapat menggerakan 2 motor. Rangkaian driver motor DC dengan IC L293D diperlihatkan pada Gambar 2.6. Pin Enable A dan B untuk mengendalikan jalan atau kecepatan motor, pin Input 1 sampai 4 untuk mengendalikan arah putaran.
Gambar 2.6. konfigurasi pin IC L293D.18
Pin Enable diberi VCC 5 Volt untuk kecepatan penuh dan PWM (Pulse Width Modulation) untuk kecepatan rotasi yang bervariasi tergantung dari level highnya.
BAB 3
METODOLOGI PENELITIAN
3.1. Tempat dan Waktu Penelitian
Penelitian dilakukan di Laboratorium Material dan Elektronika Dasar, Departemen Fisika IPB dari bulan September 2010 sampai dengan bulan Mei 2011.
3.2. Alat dan Bahan
Alat dan komponen-komponen yang digunakan pada penelitian ini ialah fotodioda BST, solder, timah, PC, mikrokontroler ATMega8535, IC LM324, IC L293D, PCB,
ACT, Bread Board, Resistor, software
CodeVision AVR C++
Untuk pembuatan film, bahan yang digunakan adalah bubuk Barium Asetat [Ba(CH3COO)2, 99%], Stronsium Asetat
[Sr(CH3COO)2, 99%], Titanium
Isopropoksida [Ti(C12O4H28), 97.999%],
Ferium Oksida [(Fe2O3)], 2-Metoksi Etanol,
substrat Si (100) tipe-p, aquades, HF (asam florida), kaca preparat dan alumunium foil.
3.3. Prosedur Penelitian
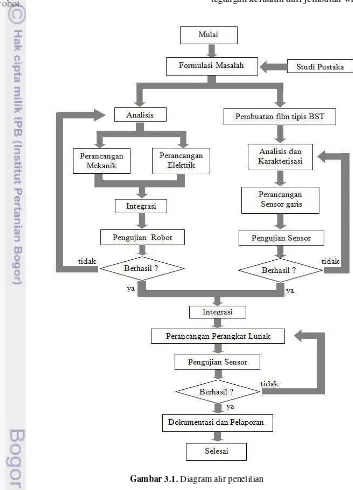
Prosedur penelitian ini meliputi dua
bagian utama yaitu pembuatan serta
karakterisasi film BST dan pembuatan robot. Gambar 3.1 menunjukan diagram alir penelitian.
3.3.1. Pembuatan badan dan rangka robot
dimana terdapat dua sensor garis yang diletakkan pada bagian depan bawah robot. Motor, gearbox dan catu daya diletakan di tingkatan pertama. Tingkatan kedua berada di atas tingkat pertama berfungsi sebagai
dudukan rangkaian elektronika dan
mikrokontroler. Roda penggerak
dihubungkan langsung ke motor DC dengan menggunakan gear box sebagai penguat torsi motor. Selain kedua roda penggerak utama, terdapat sebuah roda bantu yang berfungsi sebagai penjaga keseimbangan pergerakan robot.
3.3.2. Pembuatan Komponan Elektronika
Pada tahap ini perancangan meliputi pembuatan rangkaian sensor garis dan
pembuatan rangkaian penggerak motor
(driver motor).
3.3.2.1 Rangkaian Sensor Garis
Sensor garis terdiri atas 2 buah film BST yang yang masing-masing dirangkai dengan rangkaian jembatan wheatstone untuk
menambah sensitivitas sensor. Sinyal
tegangan keluaran dari jembatan wheatstone
diperkuat oleh rangkainan op-amp. Untuk
op-amp digunakan IC LM-324.
3.3.2.2. Rangkaian Penggerak Motor (Driver Motor)
Untuk menjalankan motor DC
digunakan sebuah IC L293D. IC L293D dapat mengontrol dua buah motor DC sekaligus. Sistem kerja dari L293D adalah dengan memberikan sinyal kontrol dalam bentuk logika atau pulsa ke jalur input.
3.3.3. Pembuatan film BST
Film Ba0,5Sr0,5TiO3 dibuat dengan cara
mencampurkan Barium Asetat
[Ba(CH3COO)2, 99%], Stronsium Asetat
[Sr(CH3COO)2, 99%], Titanium
Isopropoksida [Ti(C12O4H28), 97.99%] dan
2-Metoksi Etanol sebagai bahan pelarut. Larutan dikocok selama satu jam dengan menggunakan Ultrasonik. Setelah itu larutan
disaring dengan kertas saring untuk
mendapatkan larutan yang bersifat homogen.
Selanjutnya dilakukan penumbuhan
film pada substrat Si (100) tipe-p yang telah dicuci. Substrat yang telah ditempatkan di atas piringan spin coating ditetesi larutan BST sebanyak 3 tetes. Proses selanjutnya
adalah annealing yang bertujuan
mendifusikan larutan BST dengan substrat.
Proses selanjutnya adalah pembuatan kontak. Bahan kontak yang dipilih adalah pasta perak 99,99 %. Setelah kontak terbentuk maka proses selanjutnya adalah pemasangan hidder.
3.3.4. Pemrograman
Pembuatan program dibuat dengan menggunakan software CodeVision AVR C.
Bahasa pemrograman yang digunakan
adalah bahasa C.
BAB 4
HASIL DAN PEMBAHASAN
4.1. Pembuatan Film BST
Film BST dibuat dengan cara
mereaksikan Barium Asetat, Stronsium Asetat dan Titanium Isopropoksida dengan 2-Metoksi Etanol sebagai bahan pelarutnya. Film BST diproses annealing dengan empat variasi waktu, yaitu: 8 jam, 15 jam, 22 jam dan 29 jam. Setiap variasi waktu terdapat empat buah sampel dan diberi label (A, B, C dan D). Sehingga dengan proses annealing 8 jam terdapat sampel 8A, 8B, 8C dan 8D. Begitu pula dengan sampel 15 jam, 22 jam dan 29 jam.
4.2. Uji Sensitivitas Film BST
Pengukuran sensitivitas film BST, diperlukan untuk mencari film terbaik yang akan diaplikasikan pada robot line follower. Untuk menambah sensitivitas, film dirangkai dengan rangkaian jembatan wheatstone. Pada rangkaian ini film dirangkai secara seri dengan sebuah resistor yang kemudian diparalelkan dengan dua buah resistor yang dirangkai seri. Dari rangkaian tersebut didapatkan nilai tegangan keluaran yang terjadi akibat pengaruh perubahan intensitas cahaya.
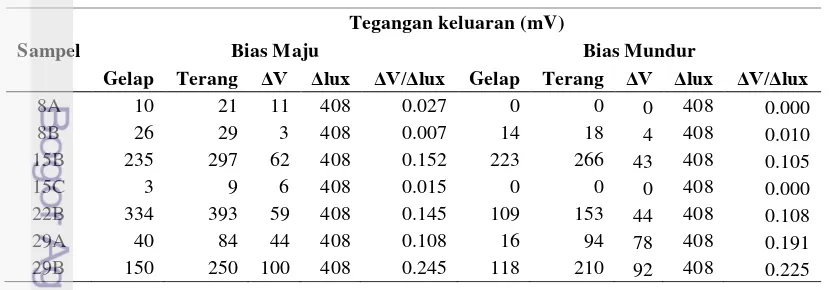
Pengujian dilakukan pada dua kondisi, yaitu pada kondisi terang (+ 410 lux) dan gelap (+ 2 lux). Hasil pengujian dapat dilihat pada Tabel 4.1 dan Gambar 4.1. Tegangan keluaran film BST pada kondisi terang lebih besar dibandingkan pada kondisi gelap. Hal ini disebabkan karena nilai konduktivitas listrik akan meningkat dengan meningkatnya intensitas cahaya yang jatuh pada permukaan fotodioda.19
Sampel
Tegangan keluaran (mV)
Bias Maju Bias Mundur
Gelap Terang ΔV Δlux ΔV/Δlux Gelap Terang ΔV Δlux ΔV/Δlux
8A 10 21 11 408 0.027 0 0 0 408 0.000
8B 26 29 3 408 0.007 14 18 4 408 0.010
15B 235 297 62 408 0.152 223 266 43 408 0.105
15C 3 9 6 408 0.015 0 0 0 408 0.000
22B 334 393 59 408 0.145 109 153 44 408 0.108
29A 40 84 44 408 0.108 16 94 78 408 0.191
29B 150 250 100 408 0.245 118 210 92 408 0.225
Dengan meningkatnya intensitas cahaya maka semakin banyak elektron yang tereksitasi dari pita valensi ke pita konduksi.20 Elektron yang tereksitasi ke pita konduksi ini akan meningkatkan pembawa
muatan yang pada akhirnya akan
meningkatkan konduktivitas listrik.21
Sensitivitas adalah perubahan
parameter input minimum yang diperlukan untuk menghasilkan perubahan output yang dapat dideteksi.22 Atau
perbandingan antara perubahan output
dengan perubahan input (ΔV/Δlux).
Semakin besar perubahan output maka film semakin sensitif. Dari hasil pengujian, film BST yang diannealing selama 29 jam memiliki sensitivitas yang tertinggi. Hal ini dapat dilihat pada Gambar 4.2, dimana film yang diannealing selama 29 jam memiliki perbedaan tegangan yang cukup signifikan yang mengindikasikan bahwa film tersebut memiliki sensitivitas yang tinggi.
4.3. Rancangan Film BST Sebagai Sensor Garis
Robot line follower pada penelitian ini menggunakan dua buah film BST sebagai sensor cahaya untuk membaca garis pada lintasan untuk menentukan arah gerak robot. Perubahan tegangan jatuh film BST yang kecil perlu diperkuat oleh rangkaian penguat agar dapat dibaca oleh mikrokontroler. Skema rangkaian elektronika lengkap robot
line follower ditunjukan oleh Gambar 4.3.
Rangkaian penguat pada penelitian ini digunakan rangkaian penguat diferensial dan penguat noninverting yang ditunjukan pada Gambar 4.4. Rangkaian penguat
pertama adalah rangkaian penguat
diferensial. Rangkaian penguat diferensial adalah rangkaian yang membandingkan dua inputan yang masuk.16 Digunakan rangkaian
Gambar 4.2. Sensitivitas film BST (ΔV/Δlux) pada rangkaian bias maju dan mundur. . 0 20 40 60 80 100 120
8A 8B 15B 15C 22B 29A 29B
Te g a n g a n K elu a ra a n (m V ) Sampel Bias Maju Bias Mundur 0,000 0,050 0,100 0,150 0,200 0,250 0,300
8A 8B 15B 15C 22B 29A 29B
Δ V/ Δ lux Sampel Bias Maju Bias Mundur
diferensial pada tahap awal karena film BST dirangkai dengan jembatan wheatstone yang memiliki dua keluaran yaitu v1 dan v2.
Rangkaian diferensial merupakan gabungan antara rangkaian noninverting (OpAmp 1) dan inverting (OpAmp 2). Gain atau penguatan untuk rangkaian noninverting
adalah:
(2.4)
Sedangkan untuk rangkaian inverting
(2.2)
Pada rangkaian inverting (OpAmp2), karena tegangan referensi diberi tegangan referensi positif (v2) maka nilai penguatanya akan berharga positif. Sehingga penguatan total untuk rangkaian diferensial adalah :
(4.1)
Kali.
Untuk rangkaian penguat kedua, yaitu rangkaian penguat noninverting (OpAmp 3). Penguatannya adalah: (2.4) Kali
Sehingga penguatan total rangkaian sensor garis adalah 2 x 11 = 22 kali. Setelah sinyal keluaran film BST diperkuat oleh rangkaian penguat, film BST kemudian diaplikasikan pada detektor garis. Prinsip dari detektor garis adalah dengan cara memberikan cahaya pada suatu bidang. Cahaya hasil pemantulan inilah yang akan dideteksi oleh film BST. Gambar 4.5 adalah ilustrasi dari detektor garis.
Cahaya dari LED akan dipantulkan oleh bidang pantul yang kemudian ditangkap oleh film BST. Tegangan keluaran hasil pengujian dapat dilihat pada Tabel 4.3; 4.4; 4.5 dan 4.6. Semakin banyak cahaya yang dipantulkan, maka intensitas yang ditangkap film BST semakin banyak sehingga
Gambar 4.5. Ilustrasi prinsip kerja sensor garis.
tegangan keluarannya semakin besar.
Sebaliknya, semakin sedikit cahaya yang dipantulkan maka cahaya yang ditangkap film BST akan sedikit sehingga tegangan keluarannya kecil. Pada penelitian ini digunakan variasi warna LED dan bidang pantulnya.
Selain dipengaruhi oleh intensitas cahaya yang dipantulkan oleh bidang pantul,
konduktivitas listrik film BST juga
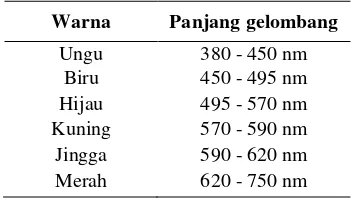
dipengaruhi oleh panjang gelombang dari sumber cahaya. Tabel 4.2. menunjukan rentang panjang gelombang cahaya tampak. Pada gelombang elektromagnetik, Panjang gelombang berbanding terbalik dengan frekuensi. Dari persamaan energi foton (persamaan 4.2), semakin besar frekuensi maka energinya semakin besar. Berdasarkan penelitian LED biru memilki energi tertinggi selanjutnya adalah LED hijau kemudian LED merah.
(4.2)
Berdasarkan hasil karakteristik
spektrum serapan panjang gelombang, film BST memiliki serapan pada panjang gelombang cahaya tampak.19 Respon dari sensor cahaya pada rangkaian dimulai pada intensitas 38 lux dan sangat ekstrim pada intensitas 400 sampai 580 lux.23 Pada penelitian ini digunakan lampu LED sebagai sumber cahaya karena LED menghasilkan cahaya pada rentang gelombang pada cahaya tampak.
Tabel 4.2. Tabel warna dan panjang gelombang cahaya tampak.
Warna Panjang gelombang
Ungu 380 - 450 nm
Biru 450 - 495 nm
Hijau 495 - 570 nm
Kuning 570 - 590 nm
Jingga 590 - 620 nm
17
Tabel 4.3. Hasil pengujian film pada bidang pantul dengan warna LED putih. Sensor 1 (Sampel 29 A)
Warna Tegangan Keluaran (V)
Bidang Pantul Ulangan 1 Ulangan 2 Ulangan 3 Rataan
Putih 5,62 5,80 5,72 5,71
Hitam 3,63 3,64 3,68 3,65
Merah 4,42 4,42 4,37 4,40
Biru 5,20 5,05 5,07 5,11
Hijau 4,70 4,87 4,75 4,77
Sensor 2 (Sampel 29 B)
Warna Tegangan Keluaran (V)
Bidang Pantul Ulangan 1 Ulangan 2 Ulangan 3 Rataan
Putih 4,44 4,75 5,26 4,82
Hitam 2,57 2,52 2,49 2,53
Merah 3,00 3,03 3,01 3,01
Biru 3,53 3,51 3,53 3,52
Hijau 3,44 3,32 3,32 3,36
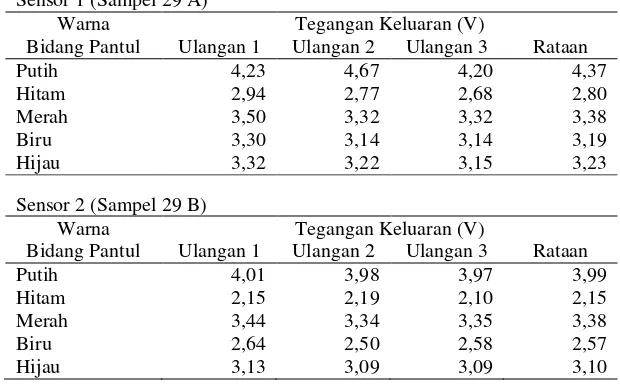
Tabel 4.4. Hasil pengujian film pada bidang pantul dengan warna LED merah.
Sensor 1 (Sampel 29 A)
Warna Tegangan Keluaran (V)
Bidang Pantul Ulangan 1 Ulangan 2 Ulangan 3 Rataan
Putih 4,23 4,67 4,20 4,37
Hitam 2,94 2,77 2,68 2,80
Merah 3,50 3,32 3,32 3,38
Biru 3,30 3,14 3,14 3,19
Hijau 3,32 3,22 3,15 3,23
Sensor 2 (Sampel 29 B)
Warna Tegangan Keluaran (V)
Bidang Pantul Ulangan 1 Ulangan 2 Ulangan 3 Rataan
Putih 4,01 3,98 3,97 3,99
Hitam 2,15 2,19 2,10 2,15
Merah 3,44 3,34 3,35 3,38
Biru 2,64 2,50 2,58 2,57
Hijau 3,13 3,09 3,09 3,10
Tabel 4.5. Hasil pengujian film pada bidang pantul dengan warna LED biru.
Sensor 1 (Sampel 29 A)
Warna Tegangan Keluaran (V)
Bidang Pantul Ulangan 1 Ulangan 2 Ulangan 3 Rataan
Putih 5,18 5,83 5,26 5,42
Hitam 2,90 3,20 3,32 3,14
Merah 3,25 4,07 3,92 3,75
Biru 4,18 5,31 4,97 4,82
Hijau 3,50 4,37 4,43 4,10
Sensor 2 (Sampel 29 B)
Warna Tegangan Keluaran (V)
Bidang Pantul Ulangan 1 Ulangan 2 Ulangan 3 Rataan
Putih 4,50 4,64 4,57 4,57
Hitam 2,02 2,12 2,10 2,08
Merah 2,35 2,32 2,30 2,32
Biru 2,29 3,22 3,22 2,91
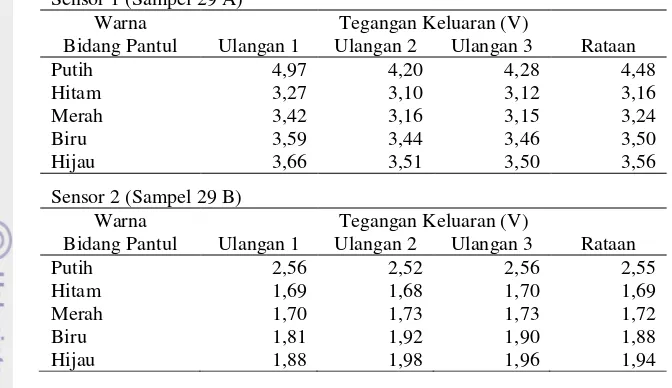
Tabel 4.6. Hasil pengujian film pada bidang pantul dengan warna LED hijau.
Sensor 1 (Sampel 29 A)
Warna Tegangan Keluaran (V)
Bidang Pantul Ulangan 1 Ulangan 2 Ulangan 3 Rataan
Putih 4,97 4,20 4,28 4,48
Hitam 3,27 3,10 3,12 3,16
Merah 3,42 3,16 3,15 3,24
Biru 3,59 3,44 3,46 3,50
Hijau 3,66 3,51 3,50 3,56
Sensor 2 (Sampel 29 B)
Warna Tegangan Keluaran (V)
Bidang Pantul Ulangan 1 Ulangan 2 Ulangan 3 Rataan
Putih 2,56 2,52 2,56 2,55
Hitam 1,69 1,68 1,70 1,69
Merah 1,70 1,73 1,73 1,72
Biru 1,81 1,92 1,90 1,88
Hijau 1,88 1,98 1,96 1,94
Gambar 4.6. Tegangan keluaran film 1 (29A) dengan variasi warna LED dan bidang pantul.
Gambar 4.7. Tegangan keluaran film 2 (29B) dengan variasi warna LED dan bidang pantul.
Pengujian pada penelitian ini digunakan lampu LED berwarna putih, biru, merah dan hijau. Pemilihan lampu LED dikarenakan LED memiliki intensitas cahaya yang tinggi yang fokus. Berdasarkan pengukuran dengan Luxmeter didapat intensitas LED putih 1984 lux, LED merah 423 lux, LED biru 724 lux dan Led hijau 1294 lux.
Sebagai bidang pantul uji digunakan bidang berwarna putih, hitam, merah, biru dan hijau. Pada Gambar 4.6 dan 4.7 didapat untuk semua LED, bidang pantul berwarna putih menghasilkan tegangan keluaran yang terbesar dan bidang pantul berwarna hitam
menghasilkan tegangan keluaran yang
terkecil. 0,00 1,00 2,00 3,00 4,00 5,00 6,00 7,00
LED Putih LED Merah LED Biru LED Hijau
Te g a n g a n K elu a ra n (V ) LED Putih Hitam Merah Biru Hijau 0,00 1,00 2,00 3,00 4,00 5,00 6,00 7,00
LED Putih LED Merah LED Biru LED Hijau
19
Tabel 4.7. Hasil pengujian input pada driver motor dan arah pergerakan motor Hal ini disebabkan karena bidang pantul
berwarna putih akan memantulkan hampir semua panjang gelombang cahaya sehingga
intensitas yang diterima film besar.
Sebaliknya, bidang berwarna hitam menyerap hampir semua panjang gelombang cahaya sehingga cahaya yang diterima film BST
sedikit.Untuk LED berwarna merah,
didapatkan tegangan pada bidang berwarna merah merupakan tertinggi kedua setelah putih. Hal ini disebabkan karena bidang merah akan memantulkan cahaya merah dan menyerap cahaya lainnya. LED merah memancarkan cahaya merah yang akan dipantulkan kembali oleh bidang berwarna merah sehingga pada bidang merah cahaya yang ditangkap film BST banyak. Demikian pula untuk LED biru dan hijau, akan memiliki tegangan keluaran yang besar pada bidang pantul yang memiliki warna yang sama dengan sumber cahayanya. LED biru memiliki perbedaan tegangan yang terbesar
untuk masing-masing bidang pantul
dibandingkan LED lainnya sehingga pada penelitian ini dipakai LED biru sebagai sumber cahaya pada rangkaian sensor garis.
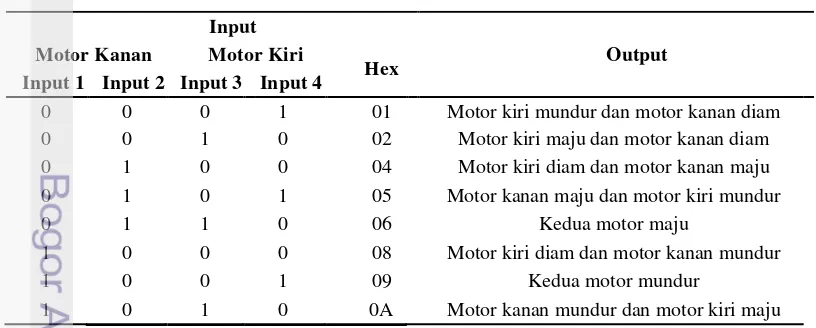
4.4. Rangkaian Driver Motor DC
Rangkaian driver motor dc terdiri dari sebuah IC L293D. Gerak kedua motor ditentukan oleh input yang diberikan pada IC. Terdapat enam jalur input pada IC L293D yang terdiri atas dua jalur PWM (pulse width modulator) untuk pengaturan kecepatan dan empat jalur untuk arah pergerakan motor. Kecepatan motor akan diatur oleh variasi
lebar pulsa yang diberikan oleh
mikrokontroler sebagai input PWM. Dari
hasil pengujian didapat beberapa
kemungkinan kondisi input yang dapat diberikan dan arah pergerakan motor. Tabel 4.7 menunjukan hasil pengujian kemungkinan input dan output yang dihasilkan.
4.5. Rangkaian Pengendali Sistem
Rangkaian penengendali sistem adalah sebuah mikrokontroler 8 bit Atmega8535
yang akan mengendalikan rangkaian
pendukung pada sistem robot. Tegangan keluaran dari rangkaian sensor garis adalah
sinyal inputan bagi mikrokontroler.
Mikrokontroler menggunakan ADC dengan resolusi 8 bit = 255 desimal. Dengan
tegangan referensi 4,8 volt maka
mikrokontroler dapat membedakan tegangan yang masuk sebesar 0,0188 volt.Untuk bisa membedakan garis, pertama pada kondisi awal robot berada pada bidang hitam dan mikrokontroler akan membaca tegangan input. Tegangan awal ini akan diartikan bahwa sensor sedang berada di atas bidang hitam. Jika tegangan input mengalami kenaikan yang cukup signifikan maka mikrokontroler akan menyimpulkan bahwa sensor sedang berada di atas bidang putih.
4.6. Pengujian
Pengujian dilakukan secara keseluruhan pada rancangan yang sudah diintegrasikan
menjadi sebuah robot line follower.
Pengujian yang pertama adalah pengujian fungsional sensor. Pengujian ini untuk memeriksa kesesuaian input yang diberikan
dengan output yang ditunjukan oleh
pergerakan motor. Tabel 4.8 menunjukan hasil pengujian fungsional sensor.
Input
Output
Motor Kanan Motor Kiri
Hex Input 1 Input 2 Input 3 Input 4
0 0 0 1 01 Motor kiri mundur dan motor kanan diam
0 0 1 0 02 Motor kiri maju dan motor kanan diam
0 1 0 0 04 Motor kiri diam dan motor kanan maju
0 1 0 1 05 Motor kanan maju dan motor kiri mundur
0 1 1 0 06 Kedua motor maju
1 0 0 0 08 Motor kiri diam dan motor kanan mundur
1 0 0 1 09 Kedua motor mundur
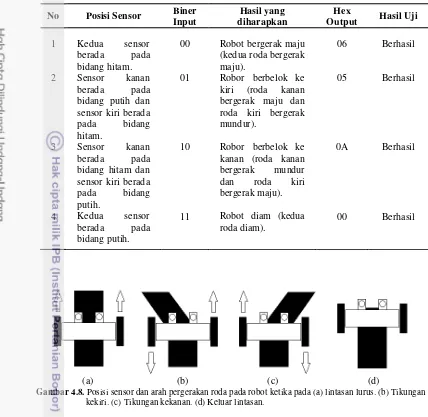
Tabel 4.8. Hasil pengujian fungsional sensor.
No Posisi Sensor Biner
Input
Hasil yang diharapkan
Hex
Output Hasil Uji
1 Kedua sensor
berada pada
bidang hitam.
00 Robot bergerak maju
(kedua roda bergerak maju).
06 Berhasil
2 Sensor kanan
berada pada
bidang putih dan sensor kiri berada
pada bidang
hitam.
01 Robor berbelok ke
kiri (roda kanan
bergerak maju dan roda kiri bergerak mundur).
05 Berhasil
3 Sensor kanan
berada pada
bidang hitam dan sensor kiri berada
pada bidang
putih.
10 Robor berbelok ke
kanan (roda kanan
bergerak mundur
dan roda kiri
bergerak maju).
0A Berhasil
4 Kedua sensor
berada pada
bidang putih.
11 Robot diam (kedua
roda diam).
00 Berhasil
(a) (b) (c) (d)
Gambar 4.8. Posisi sensor dan arah pergerakan roda pada robot ketika pada (a) lintasan lurus. (b) Tikungan kekiri. (c) Tikungan kekanan. (d) Keluar lintasan.
Lintasan yang yang diuji adalah garis hitam di atas bidang putih. Pada kondisi awal robot berada pada bidang putih. Jika kedua sensor berada pada bidang hitam maka pada kondisi ini robot bergerak maju (Gambar 4.8 (a)). Jika robot menemukan tikungan ke kiri maka sensor kiri akan berada pada garis atau bidang hitam dan sensor kanan berada pada bidang putih (Gambar 4.8 (b)). Pada kondisi ini roda kanan akan bergerak maju dan roda kiri bergerak mundur. Sehingga robot berputar ke kanan. Sebaliknya jika robot menemukan tikungan ke kanan maka sensor kiri yang berada pada bidang putih dan sensor kanan berada pada bidang hitam (Gambar 4.8 (c)). Sehingga pada kondisi ini robot harus diputar kekiri untuk berbelok kekiri. Kondisi terakhir adalah jika robot keluar lintasan dan
kedua sensor berada pada bidang putih. Pada kondisi ini kedua roda diam sehingga robot berhenti (Gambar 4.8 (d)). Pengujian yang kedua adalah pengujian fungsional robot. Robot akan berjalan pada sebuah jalur hitam
di atas bidang putih yang akan
21
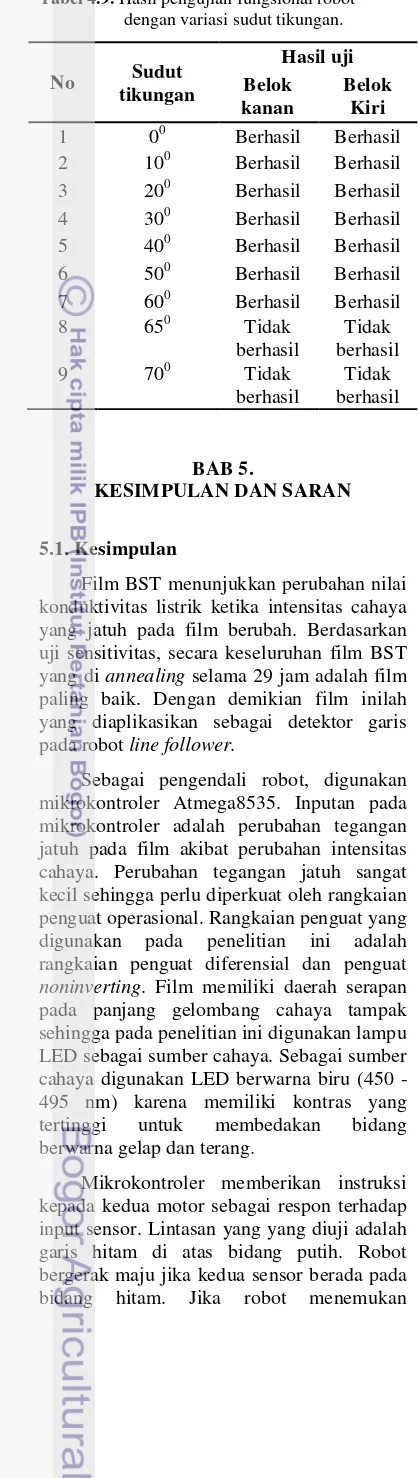
Tabel 4.9. Hasil pengujian fungsional robot dengan variasi sudut tikungan.
No Sudut
tikungan Hasil uji Belok kanan Belok Kiri
1 00 Berhasil Berhasil
2 100 Berhasil Berhasil
3 200 Berhasil Berhasil
4 300 Berhasil Berhasil
5 400 Berhasil Berhasil
6 500 Berhasil Berhasil
7 600 Berhasil Berhasil
8 650 Tidak
berhasil
Tidak berhasil
9 700 Tidak
berhasil
Tidak berhasil
BAB 5.
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Film BST menunjukkan perubahan nilai konduktivitas listrik ketika intensitas cahaya yang jatuh pada film berubah. Berdasarkan uji sensitivitas, secara keseluruhan film BST yang di annealing selama 29 jam adalah film paling baik. Dengan demikian film inilah yang diaplikasikan sebagai detektor garis pada robot line follower.
Sebagai pengendali robot, digunakan mikrokontroler Atmega8535. Inputan pada mikrokontroler adalah perubahan tegangan jatuh pada film akibat perubahan intensitas cahaya. Perubahan tegangan jatuh sangat kecil sehingga perlu diperkuat oleh rangkaian penguat operasional. Rangkaian penguat yang
digunakan pada penelitian ini adalah
rangkaian penguat diferensial dan penguat
noninverting. Film memiliki daerah serapan pada panjang gelombang cahaya tampak sehingga pada penelitian ini digunakan lampu LED sebagai sumber cahaya. Sebagai sumber cahaya digunakan LED berwarna biru (450 - 495 nm) karena memiliki kontras yang
tertinggi untuk membedakan bidang
berwarna gelap dan terang.
Mikrokontroler memberikan instruksi kepada kedua motor sebagai respon terhadap input sensor. Lintasan yang yang diuji adalah garis hitam di atas bidang putih. Robot bergerak maju jika kedua sensor berada pada
bidang hitam. Jika robot menemukan
tikungan ke kiri maka sensor kiri akan berada pada garis atau bidang hitam dan sensor kanan berada pada bidang putih. Pada kondisi ini roda kanan akan bergerak maju dan roda kiri bergerak mundur. Sehingga robot berputar ke kiri untuk berbelok ke kiri. Sebaliknya jika robot menemukan tikungan ke kanan maka robot berputar ke kanan. Kondisi terakhir adalah jika robot keluar lintasan dan kedua sensor berada pada bidang putih. Pada kondisi ini kedua roda diam sehingga robot berhenti. Berdasarkan hasil pengujian, robot dapat berjalan dengan baik dengan sudut tikungan dibawah 600.
5.2. Saran
Film dengan material ferroelektrik memiliki respon terhadap perubahan cahaya, suhu, tekanan dan konsentrasi suatu gas sehingga masih banyak pengembangan yang bisa dilakukan untuk aplikasi lain seperti sebagai sensor gas, suhu atau tekanan. Perlu dilakukan variasi perlakuan dalam proses pembuatan film untuk mendapatkan respon yang paling dominan dari keempat respon yang ada. Selain itu perlu dicari rangkaian penguat yang dapat membangkitkan dan
membedakan sinyal listrik berdasarkan
respon yang diterimanya. Sehingga
kedepannya akan didapatkan satu sensor yang dapat merespon empat hal sekaligus.
Agar berhati-hati dalam pemasangan kabel pada kontak karena kabel dan pasta perak mudah bergeser keluar area kontak
sehingga menyebabkan penurunan
sensitivitas film. Pisahkan catu daya untuk masing-masing rangkaian mikrokontroler, motor dan rangkaian penguat agar tidak
saling membebani dan mempengaruhi
rangkaian lainnya.
Perlu dipasang berbagai jenis sensor pada rancangan robot agar robot bisa membaca lingkungan dengan lebih baik. Seperti sensor sonar untuk mengetahui jarak di depan robot agar robot tidak bertabrakan.
DAFTAR PUSTAKA
1. Sanjib, Saha. (2000). Study of pulsed laser ablated Barium Strontium Titanate thin films for dynamic random access Memory Application [Thesis]. Bangalore India: Material Research Centre, Indian Institute of Science. 2. Azizahwati. (2002). Studi Morfologi
ditumbuhkan dengan metode DC Unbalanced Magnetron Sputtering.
Jurnal Nasional Indonesia. Universitas Riau, 5 (1). 50-56.
3. Giridharan, N.V., Ramasamy, P.,
Jayavel, R. (2001). Structural,
Morphological and Electrical Studies on Barium Strontium Titanate Thin Films Prepared by Sol-Gel Technique. Crystal
Growth Centre, Anna University,
Chennai, India, 36 (1), 65-72.
4. Schwartz, R.W. (1997). Chemical
Solution Deposition of Perovskite Thin Films. Department of Ceramic and
Materials Engineering, Clemson
University, Clemson, South Carolina 29634-0907, 9 (11), 2325-2340.
5. Darmasetiawan, H. (2005). Optimal Penumbuhan Film BaTiO3 yang didadah Indium dan Vanadium (BIVT) serta penerapannya sebagai Sel Surya. Institut Pertanian Bogor.
6. Tae Gon Ha. (2006). Cu-Dopping Effect
on the Dielectric and Insulation
Properties of Sol-Gel Derived
Ba0,7Sr0,3TiO3 Thin Film. Journal of
korean Physical Society, (49). 571-574 7. Irzaman, Arif, A., Syafutra, H., Romzie,
M. (2009). Studi konduktivitas listrik, kurva I-V dan celah energi fotodioda berbasis film semikonduktor BST yang didadah galium menggunakan metode chemical solution deposition (CSD). Jurn Apl Fis 5(1): 22-30.
8. Fuad, A. (1999). Karakterisasi
Kapasitansi Tegangan Film
Ferroelektrik Ba0,5Sr0,5TiO3 dengan
struktur
Metal-Ferroelektrik-Semikonduktor (MFS) dan potensi
penerapannya pada memori.
Proceedings, Industrial Electronic
Seminar .
9. Budianto, Hary. (2007). Robot dengan Sistem Pendeteksi Sensor Garis untuk Mengangkat Barang [skripsi]. Medan :
Fakultas Matematika dan Ilmu
pengetahuan Alam, Universitas Sumatra Utara.
10. Syamsurizal, M. (2008). Rancang
Bangun Alat Tomografi Impedansi Listrik untuk pencitraan Buah Mangga
[skripsi]. Bogor: Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Pertanian Bogor.
11.Wardhana, L. (2006). Belajar sendiri Mikrokontroler AVR Seri ATMega8535
simulasi, Hardware, dan Aplikasi. Yogyakarta: Penerbit Andi Yogyakarta. 12. [Atmel Corp]. (2003). 8-bit AVR
Microcontroller with 8K Bytes In-System Programmable Flash. [tempat tidak diketahui]: Atmel Corp.
13. Kuncoro, Giri. 9 Januari 2009.
Membuat Robot Line Follower
Sederhana. WordPress.
http://Pentriloquist.wordpress/2009/01/ 09/membuat-robot-line-follower-sederhana. diakses 19 Februari 2010. 14. Fahmizal. 25 Juli 2010. Merancang
Rangkaian Sensor Garis. WordPress.
http://fahmizaleeits.wordpress.com/tag/ merancang-rangkaian-sensor-garis.
diakses 8 September 2010.
15. Mancini, R. (2003). Op Amps for Everyone. United States of America: Elsevier.
16. Clayton, G., Winder, S. (2005).
Operational Amplifiers. Kastawan W,
penerjemah; Santika, W, editor.
England: Elsevier Ltd. Terjemahan dari:
Operational Amplifiers.
17. Steven T. Karris. Electronic Devices and Amplifier Circuits with MATLAB Applications. United States of America: Orchard Publications.
18. [Anonim].19 Juli 2008. DC Motor
Control. Extremeelectronics.
http://extremeelectronics.co.in/avr-tutorials/dc-motor-control. diakses 7 Februari 2011.
19. Syafutra, H. (2010). Pengintegrasian Sensor Cahaya Tampak Berbasis Film Material Ferroelektrik Ba0,25Sr0,75TiO3 pada Mikrokontroler ATMega8535
[Thesis]. Bogor: Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Pertanian Bogor.
20. Omar, M.A. (1993). Elementary Solid State Physics. Addison-Wesley Publishing Company.
21. Milan, J., Lauhon, L., Allen, J. (2005). Photoconductivity of semiconducting CdS Nanowires. Spring 2(1):43-47. 22. Johnson, M. (2004). Photodetection and
Measurement: Maximizing Performance in Optical Systems. United States of America: The McGraw-Hill Companies. 23.Huriawati, H. (2009). Sintesis Film BST didadah Niobium dan Tantalum serta Aplikasinya Sebagai Sensor Cahaya
Lampiran 1. Program robot line follower
/*
Date : 26/04/2011
Author : Ade Kurniawan
Company : Fisika IPB
*/
#include <mega8535.h>
#include <delay.h>
#define ADC_VREF_TYPE 0x60
// Read the 8 most significant bits // of the AD conversion result
unsigned char read_adc(unsigned char adc_input) {
ADMUX=adc_input | (ADC_VREF_TYPE & 0xff);
// Delay needed for the stabilization of the ADC input voltage delay_us(10);
// Start the AD conversion ADCSRA|=0x40;
// Wait for the AD conversion to complete while ((ADCSRA & 0x10)==0);
ADCSRA|=0x10; return ADCH; }
void main(void) {
int X, Y, A, B, i, sensorA, sensorB ;
ADMUX=ADC_VREF_TYPE & 0xff; ADCSRA=0x84;
SFIOR&=0xEF;
Delay_ms(3000); DDRC=0xFF; DDRD=0xFF; DDRB=0xFF;
// Baca tegangan awal untuk menentukan tegangan referensi
// Tegangan referensi = nilai tengah antara tegangan putih & hitam A = read_adc(1);
X = A+40;
25
//kedua sensor berada pada bidang hitam (maju) if ((sensorA << X) && (sensorB << Y)) {
PORTD = 0x06;
delay_ms(20);}}
//sensor kanan putih & sensor kiri hitam (belok kiri)
if ((sensorA >= X) && (sensorB << Y)) { PORTD = 0x05;
delay_ms(20);}}
//sensor kanan hitam & sensor kiri putih (belok kanan) if ((sensorA << X) && (sensorB >= Y)) {
PORTD = 0x0A;
delay_ms(20);}}
//kedua sensor berada pada bidang putih (diam) if ((sensorA >= X) && (sensorB >= Y)) {
PORTD = 0x00;
delay_ms(20);}}
};
Lampiran 2. Gambar rancangan robot line follower
Film BST
Badan Robot
Robot line follower
ABSTRAK
ADE KURNIAWAN. Penerapan Fotodioda Film Ba0.5Sr0.5Tio3 (BST) sebagai Detektor Garis pada
Robot Line Follower Berbasis Mikrokontroler Atmega8535. Dibimbing oleh: Dr. IRZAMAN dan ARDIAN ARIF, M.Si.
Pada penelitian ini telah dilakukan pembuatan robot line follower dengan fotodioda film Ba0,5Sr0,5TiO3 (BST) sebagai detektor garisnya. Film BST dapat menghasilkan arus listrik jika
dikenai cahaya yang mengakibatkan konduktifitas film berubah. Konduktifitas film akan meningkat, dengan meningkatnya intensitas cahaya yang masuk. Sebagai pengendali robot, digunakan mikrokontroler Atmega8535. Inputan pada mikrokontroler adalah perubahan tegangan jatuh pada film akibat perubahan intensitas cahaya. Perubahan tegangan jatuh sangat kecil sehingga perlu diperkuat oleh rangkaian penguat operasional. Mikrokontroler memberikan instruksi kepada kedua motor sebagai respon terhadap input yang diberikan. Sebelum diaplikasikan sebagai detektor garis, film diuji dengan variasi warna sumber cahaya dan bidang pantul. Film BST memiliki daerah serapan pada panjang gelombang cahaya tampak sehingga pada penelitian ini digunakan lampu LED sebagai sumber cahaya. Robot pada penelitian ini menggunakan film yang diproses annealing selama 29 jam karena memiliki sensitivitas tertinggi. Sebagai sumber cahaya digunakan LED berwarna biru karena memiliki kontras yang tinggi untuk membedakan bidang berwarna gelap dan terang
BAB 1
PENDAHULUAN
1.1. Latar Belakang
Film Barium Stronsium Titanat (BST) berpotensi sebagai sensor cahaya (fotodioda) dan sensor suhu.1-2 Film BST dapat dibuat dengan beberapa metode diantaranya Pulsed Laser Deposition (PLD), Metal Organic Solution Deposition (MOSD), Sol-antikann Gel Process dan RF Magnetron Sputtering.3 Selain itu juga terdapat Metode Chemical Solution Deposition (CSD) yang telah lama dikembangkan untuk penumbuhan perovskite thin film semenjak tahun 1980-an dan dipublikasikan oleh Fukashima et al.4 Dalam penelitian ini film BST dibuat dengan metode
chemical solution deposition (CSD) karena metode ini memiliki keunggulan yaitu prosedurnya mudah, biayanya relatif murah dan mendapatkan hasil yang bagus.
Robot merupakan sebuah mesin yang
memiliki kecerdasan tertentu untuk
membantu tugas-tugas manusia mengerjakan hal yang kadang sulit atau tidak bisa dilakukan manusia secara langsung. Misalnya untuk menangani material radio aktif, merakit mobil dalam industri perakitan mobil, menjelajah planet mars, sebagai media pertahanan atau perang, dan sebagainya. Line Follower Robot (Robot Pengikut Garis) adalah robot yang dapat berjalan mengikuti sebuah lintasan, ada yang menyebutnya dengan Line Tracker, Line Tracker Robot dan sebagainya. Garis yang dimaksud adalah garis berwarna gelap di atas permukaan berwarna terang atau sebaliknya.
Film BST yang dibuat ini diharapkan menjadi sensor cahaya (fotodioda). Dimana fotodioda ini dapat dikembangkan menjadi detektor garis. Detektor garis memanfaatkan sifat pemantulan cahaya pada bahan. Sebuah bahan disinari dengan cahaya yang kemudian dipantulkan dan ditangkap oleh film BST. Perbedaan warna garis dan bidang ini akan menghasilkan perbedaan intensitas cahaya yang dipantulkan. Jika film BST dikenai
cahaya maka material tersebut akan
menghasikan beda potensial, dimana beda potensial ini berupa beda potensial analog. Beda potensial ini akan dikuatkan dengan penguat tegangan (Op Amp). Sinyal keluaran yang masuk akan diolah Mikrokontroler ATMega8535 menjadi pergerakan robot.
1.2. Tujuan Penelitian
1.Membuat film Ba0.5Sr0.5TiO3 (BST)
sebagai sensor cahaya fotodioda. 2.Merancang sebuah robot line follower
yang berbasiskan pada
mikrokontroler.
3.Mengaplikasikan fotodioda BST
sebagai detektor garis pada robot line follower.
1.3. Perumusan Masalah
Apakah film Ba0.5Sr0.5TiO3 (BST) dapat
dimanfaatkan sebagai detektor garis pada robot line follower ?
1.4. Hipotesis
Film BST memiliki sifat peka terhadap perubahan intensitas cahaya, sehingga dapat dimanfaatkan sebagai detektor garis pada robot line follower.
BAB 2
TINJAUAN PUSTAKA
2.1. Barium Stronsium Titanat (BST)
Barium Stronsium Titanat (BST)
merupakan material ferroelektrik yang
berpotensi untuk dijadikan sensor cahaya. Pembuatan film BST dapat dilakukan dengan beberapa metode, diantaranya adalah pulsed laser deposition (PLD), sol gel process,
dan metode chemical solution deposition
(CSD).5-7 Persamaan reaksi untuk BST ialah :
xBa(CH3COO)2 + 1-xSr(CH3COO)2 +
Ti(C12H28O4)+ 22O2 →
BaxSr1-xTiO3 + 17H2O + 16CO2
Temperatur dimana sifat ferroelekrik bahan dapat bekerja atau temperatur curie
Barium Titanat murni sebesar 130 °C. Dengan penambahan Stronsium, temperatur
curie Barium Titanat menurun menjadi temperatur kamar sehingga bisa diaplikasikan pada suhu kamar.8
9
mengandung lapisan intrinsik antara lapisan n dan p. Cahaya diserap di daerah
persambungan atau daerah intrinsik
menimbulkan pasangan elektron-hole.9
2.2. Mikrokontroler
Mikrokontroler adalah sebuah sistem mikroprosesor lengkap yang dikemas dalam
sebuah chip. Mikrokontroler dapat
menggantikan fungsi komputer dalam
pengendalian kerja. Keuntungan penggunaan mikrokontroler adalah sistem elektronik akan menjadi lebih mudah dan ringkas dan rancang bangun sistem elektronik akan lebih cepat karena sebagian besar dari sistem
adalah perangkat lunak yang mudah
dimodifikasi.10
Mikrokontroler tersusun atas
mikroprosesor dan piranti pendukungnya. Sistem kerjanya diatur berdasarkan program dalam bahasa pemrograman yang digunakan, ada beberapa bahasa pemrograman yang dapat digunakan, pada umumnya semua bahasa pemrograman dapat diaplikasikan ke mikrokontroler, akan tetapi membutuhkan kompiler yang mendukung mikrokontroler tersebut. Bahasa pemrograman yang biasa digunakan dalam memrogram mikrokontroler produksi Atmel adalah bahasa Assembler, bahasa C, C++, Basic, ataupun Turbo pascal.
ATMega8535 merupakan salah satu mikrokontroler 8 bit buatan Atmel untuk keluarga Alv and Vegard’s Risc processor
(AVR). Mikrokontroler keluarga AVR,
menggunakan arsitektur RISC. (Reduced Instruction Set Computing) 8 bit. Pada sistem RISC sebagian besar kode instruksinya dikemas dalam satu siklus clock. instruksi dijalankan, instruksi lain berikutnya akan di-prefetch dari memori program.
ATMega8535 memiliki fitur sebagai berikut:11
1. Sistem mikrokontroler 8 bit berbasis RISC dengan kecepatan maksimal 16 MHz.
2. Memiliki memori flash 8 KB,
SRAM sebesar 512 byte dan
EEPROM (Electrically Erasable
Programmable Read Only Memory) sebesar 512 byte.
3. Memiliki ADC (Pengubah
analog-ke-digital) internal dengan ketelitian 10 bit sebanyak 8 saluran.
4. Memiliki PWM (Pulse Wide
Modulation) internal sebanyak 4 saluran.
5. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5 Mbps.
6. Enam pilihan mode sleep, untuk menghemat penggunaan daya listrik.
Mikrokontroler ATMega8535 juga
memiliki 40 pin, yang dimana setiap pin memiliki fungsi tertentu. Gambar 2.1 adalah
konfigurasi pin pada mikrokontroler
ATMega8535.
Deskripsi pin pada mikrokontroler ATMega8535:12
1. Vcc : pin masukan
sumber tegangan.
2. Ground : pin masukan
ground
3. Port A (PA0..PA7) : pin I/O dua arah dan pin masukan ADC.
4. Port B (PB0..PB7) : pin I/O dua arah dan pin fungsi khusus, yaitu
Timer/ Counter, komparator analog,dan SPI
5. Port C (PC0..PC7) : pin I/O dua arah dan pin fungsi khusus, yaitu TWI,komparator analog dan Timer Oscillator.
6. Port D (PD0..PD7) : pin I/O dua arah dan pin fungsi khusus, yaitu
komparator analog, interupsi
eksternal, dan komunikasi serial
7. RESET : pin untuk
me-reset mikrokontroler.
8. XTAL1 : pin masukan
clock internal dan masukan
inverting Oscillator amplifier
internal
9. XTAL2 : pin keluaran
inverting Oscillator amplifier
10. AVCC : pin masukan
tegangan untuk ADC
11. AREF : pin masukan
tegangan referensi ADC
2.3. Sensor Garis
Sensor garis adalah sensor yang dapat mendeteksi adanya garis atau tidak pada suatu permukaan. Sensor garis sering digunakan pada robot line follower (robot pengikut garis), digunakan juga sebagai pendeteksi objek dengan permukaan
bidang pantul yang kontras. Selain
menggunakan fotodioda dapat juga dirancang dengan menggunakan photo transsistor, infra red, dan masih banyak lainnya.
Fotodioda adalah salah satu jenis sensor yang peka terhadap cahaya (photodetector). Fotodioda akan mengalirkan arus yang membentuk fungsi linear terhadap intensitas cahaya yang diterima. Arus ini umumnya teratur terhadap power density (Dp). Perbandingan antara arus keluaran dengan
power density disebut sebagai current responsitivity. Hubungan antara keluaran sensor fotodioda dengan intensitas cahaya yang diterimanya ketika dipanjar mundur adalah membentuk suatu fungsi yang linier.13 Hubungan antara keluaran sensor photodiode
[image:31.595.343.492.87.210.2]dengan intensitas cahaya ditunjukkan pada Gambar 2.2.
Pada sensor garis LED berfungsi sebagai pengirim cahaya ke garis untuk
dipantulkan lalu dibaca oleh sensor
fotodioda. Sifat dari warna putih (permukaan terang) yang memantulkan cahaya dan warna
hitam (permukaan gelap) yang tidak
memantulkan cahaya digunakan dalam
aplikasi ini.14 Gambar 2.3 adalah ilustrasi mekanisme sensor garis.
Pada sensor garis fotodioda, nilai resistansi akan berkurang bila terkena cahaya dan bekerja pada kondisi reverse bias. Untuk pemberi pantulan cahaya digunakan LED
superbright, komponen ini mempunyai cahaya yang sangat terang, sehingga cukup
untuk mensuplai pantulan cahaya ke
fotodioda.
[image:31.595.330.505.257.331.2]Gambar 2.2. Hubungan keluaran fotodioda dengan intensitas cahaya.13
Gambar 2.3. Ilustrasi mekanisme sensor garis.14
Saat fotodioda tidak terkena cahaya, maka nilai resistansinya akan besar atau dapat diasumsikan tak hingga. Sehingga tidak ada arus yang mengalir. Saat terkena cahaya, maka fotodioda akan bersifat sebagai sumber tegangan dan nilai resistansinya akan menjadi kecil, sehingga akan ada arus yang mengalir.
2.4. Op-amp
Op-amp adalah rangkaian penguat sinyal (signal amplifier). Op-Amp memiliki 4 jenis penguatan dasar; penguat noninverting,
penguat inverting, penguat penjumlahan dan penguat differensial.15 Berikut ini adalah parameter Op-Amp yang dianggap berlaku ideal; (i) arus masukan, tegangan offset masukan dan impedansi keluaran bernilai nol. (ii) impedansi masukan dan gainnya bernilai tak hingga.16
Pada penguat inverting (Gambar 2.4), sinyal masukan vin, dihubungkan dengan
input minus (-) dan input plus (+) digroundkan. Faktor penguat ditentukan oleh perbandingan hambatan (Rin dan Rf) yang
dipakai.17 sinyal yang masuk akan mengalami pergeseran fasa 1800 pada sinyal keluaran Besarnya faktor penguatannya dapat ditulis sebagai:
11
Atau penguatannya adalah
(2.2)
Pada penguat Non-Inverting (Gambar 2.5) sinyal masukan dihubungkan dalam input plus (+), dan faktor penguat ditentukan oleh perbandingan hambatan yang dipakai.17 Besarnya faktor penguatannya dapat ditulis sebagai:
(2.3)
Atau penguatannya adalah
(2.4)
Gambar 2.4. Op-amp Inverting17
Gambar 2.5. Op-amp Non Inverting17
2.5. Driver motor DC
Motor DC (direct current) adalah alat yang berfungsi mengubah energi listrik menjadi energi mekanik. Motor DC banyak digunakan sebagai penggerak dalam berbagai peralatan. Motor DC berputar sebagai hasil saling interaksi dua medan magnet. Interaksi ini terjadi disebabkan arus yang mengalir pada kumparan.
Arus output dari mikrokontroler sangat kecil dan tidak kuat untuk menggerakan motor. Untuk mengendalikan motor maka diperlukan sebuah rangkaian driver motor.
[image:32.595.327.509.84.217.2]IC L293D merupakan driver motor yang dapat menggerakan 2 motor. Rangkaian driver motor DC dengan IC L293D diperlihatkan pada Gambar 2.6. Pin Enable A dan B untuk mengendalikan jalan atau kecepatan motor, pin Input 1 sampai 4 untuk mengendalikan arah putaran.
Gambar 2.6. konfigurasi pin IC L293D.18
Pin Enable diberi VCC 5 Volt untuk kecepatan penuh dan PWM (Pulse Width Modulation) untuk kecepatan rotasi yang bervariasi tergantung dari level highnya.
BAB 3
METODOLOGI PENELITIAN
3.1. Tempat dan Waktu Penelitian
Penelitian dilakukan di Laboratorium Material dan Elektronika Dasar, Departemen Fisika IPB dari bulan September 2010 sampai dengan bulan Mei 2011.
3.2. Alat dan Bahan
Alat dan komponen-komponen yang digunakan pada penelitian ini ialah fotodioda BST, solder, timah, PC, mikrokontroler ATMega8535, IC LM324, IC L293D, PCB,
ACT, Bread Board, Resistor, software
CodeVision AVR C++
Untuk pembuatan film, bahan yang digunakan adalah bubuk Barium Asetat [Ba(CH3COO)2, 99%], Stronsium Asetat
[Sr(CH3COO)2, 99%], Titanium
Isopropoksida [Ti(C12O4H28), 97.999%],
Ferium Oksida [(Fe2O3)], 2-Metoksi Etanol,
substrat Si (100) tipe-p, aquades, HF (asam florida), kaca preparat dan alumunium foil.
3.3. Prosedur Penelitian
Prosedur penelitian ini meliputi dua
bagian utama yaitu pembuatan serta
karakterisasi film BST dan pembuatan robot. Gambar 3.1 menunjukan diagram alir penelitian.
3.3.1. Pembuatan badan dan rangka robot
dimana terdapat dua sensor garis yang diletakkan pada bagian depan bawah robot. Motor, gearbox dan catu daya diletakan di tingkatan pertama. Tingkatan kedua berada di atas tingkat pertama berfungsi sebagai
dudukan rangkaian elektronika dan
mikrokontroler. Roda penggerak
dihubungkan langsung ke motor DC dengan menggunakan gear box sebagai penguat torsi motor. Selain kedua roda penggerak utama, terdapat sebuah roda bantu yang berfungsi sebagai penjaga keseimbangan pergerakan robot.
3.3.2. Pembuatan Komponan Elektronika
Pada tahap ini perancangan meliputi pembuatan rangkaian sensor garis dan
pembuatan rangkaian penggerak motor
(driver motor).
3.3.2.1 Rangkaian Sensor Garis
Sensor garis terdiri atas 2 buah film BST yang yang masing-masing dirangkai dengan rangkaian jembatan wheatstone untuk
menambah sensitivitas sensor. Sinyal
[image:33.595.115.468.225.715.2]tegangan keluaran dari jembatan wheatstone
diperkuat oleh rangkainan op-amp. Untuk
op-amp digunakan IC LM-324.
3.3.2.2. Rangkaian Penggerak Motor (Driver Motor)
Untuk menjalankan motor DC
digunakan sebuah IC L293D. IC L293D dapat mengontrol dua buah motor DC sekaligus. Sistem kerja dari L293D adalah dengan memberikan sinyal kontrol dalam bentuk logika atau pulsa ke jalur input.
3.3.3. Pembuatan film BST
Film Ba0,5Sr0,5TiO3 dibuat dengan cara
mencampurkan Barium Asetat
[Ba(CH3COO)2, 99%], Stronsium Asetat
[Sr(CH3COO)2, 99%], Titanium
Isopropoksida [Ti(C12O4H28), 97.99%] dan
2-Metoksi Etanol sebagai bahan pelarut. Larutan dikocok selama satu jam dengan menggunakan Ultrasonik. Setelah itu larutan
disaring dengan kertas saring untuk
mendapatkan larutan yang bersifat homogen.
Selanjutnya dilakukan penumbuhan
film pada substrat Si (100) tipe-p yang telah dicuci. Substrat yang telah ditempatkan di atas piringan spin coating ditetesi larutan BST sebanyak 3 tetes. Proses selanjutnya
adalah annealing yang bertujuan
mendifusikan larutan BST dengan substrat.
Proses selanjutnya adalah pembuatan kontak. Bahan kontak yang dipilih adalah pasta perak 99,99 %. Setelah kontak terbentuk maka proses selanjutnya adalah pemasangan hidder.
3.3.4. Pemrograman
Pembuatan program dibuat dengan menggunakan software CodeVision AVR C.
Bahasa pemrograman yang digunakan
adalah bahasa C.
BAB 4
HASIL DAN PEMBAHASAN
4.1. Pembuatan Film BST
Film BST dibuat dengan cara
mereaksikan Barium Asetat, Stronsium Asetat dan Titanium Isopropoksida dengan 2-Metoksi Etanol sebagai bahan pelarutnya. Film BST diproses annealing dengan empat variasi waktu, yaitu: 8 jam, 15 jam, 22 jam dan 29 jam. Setiap variasi waktu terdapat empat buah sampel dan diberi label (A, B, C dan D). Sehingga dengan pr