REALISASI ROBOT LINE FOLLOWER UNTUK GALELOBOT 2009
Disusun oleh :
Nama : Albert Adryanto
NRP : 0522056
Jurusan Teknik Elektro, Fakultas Teknik, Universitas Kristen Maranatha, Jln. Prof. Drg. Suria Sumantri, MPH no. 65, Bandung 40164, Indonesia,
email :[email protected] [email protected]
ABSTRAK
Kemajuan teknologi telah meningkatkan kualitas hidup manusia. Salah satu hasilnya adalah robot. Keberadaan robot telah banyak membantu manusia untuk meringankan pekerjaan. Salah satu bentuk robot yang paling popular adalah robot beroda.
Hasilnya memperlihatkan bahwa robot mampu mengikuti jalur hitam pada lapangan Kompetisi GALELOBOT 2009 yang sudah dimodifikasi dari posisi START sampai posisi FINISH dengan persentase keberhasilan sebesar 80% dan
rata-rata kelajuan sebesar 5.24 cm/s.
REALIZATION OF THE LINE FOLLOWER ROBOT FOR GALELOBOT 2009
Composed by :
Name : Albert Adryanto
NRP : 0522056
Electrical Engineering Faculty, Maranatha Christian University, Jln. Prof. Drg. Suria Sumantri, MPH no. 65, Bandung 40164, Indonesia,
email :[email protected] [email protected]
ABSTRACT
The development of technology has increased human life quality. One of the result is a robot. The existance of robot has helped human to do their work and make it easier to do. One of the most popular form of robot is wheel robot.
In this Final Project is to realizing a black line follower robot for GALELOBOT Competition 2009. Black line follower robot is one of autonomous mobile robot that has mission following outonoumosly the guided line. In its design and implementation, problems that should be solve are system robot vision, architecture of hardware including electronics and mechanics, and organization of software for knowledge base and control. The goal of this Final Project is to design and realize a black line follower robot for GALELOBOT Competition 2009 by using ATmega16 microcontroller and Hamamatsu P5587 optic sensor. The mechanical system of the robot adopts manuverability system of mobile tank.
DAFTAR ISI
ABSTRAK ... i
ABSTRACT ... iii
KATA PENGANTAR ... v
DAFTAR ISI ... vii
DAFTAR TABEL ... xi
DAFTAR GAMBAR ... xiii
BAB I PENDAHULUAN I.1 Latar Belakang ... 1
I.2 Identifikasi Masalah ... 2
I.3 Tujuan ... 2
I.4 Pembatasan Masalah ... 2
I.5 Metodologi Penelitian ... 3
I.6 Spesifikasi Alat ... 3
I.7 Sistematika Penulisan ... 4
BAB II LANDASAN TEORI II.1 Teori Robotika ... 5
II.1.1 Sejarah dan Perkembangan Robot ... 5
II.1.2 Mobile Robot ... 8
II.1.3 Mekatronika ... 8
II.1.4 Komponen Dasar Untuk Merancang Dan Merealisasikan Robot ... 9
II.1.5 Derajat Kebebasan (Degree of Freedom) ... 10
II.1.6 Klasifikasi Robot Berdasarkan Konstruksi Robot ... 11
II.1.7 Jenis Robot Beroda (Wheel Robot) Berdasarkan Sistem Gerak ... 14
II.1.9 Klasifikasi Robot Berdasarkan Tingkat
Kemampuan Melakukan Tugas ... 18
II.1.10 Klasifikasi Robot Berdasarkan Mobilitas ... 19
II.1.11 Klasifikasi Robot Berdasarkan Metode Kontrol ... 20
II.1.12 Sistem Kontrol Robot ... 21
II.2 GALELOBOT 2009 ... 22
II.2.1 Lapangan Kompetisi GALELOBOT 2009 ... 23
II.3 Mikrokontroler ... 29
II.3.1 Pengenalan ATMEL AVR RISC ... 29
II.3.2 Mikrokontroler ATmega16 ... 30
II.3.3 Fitur ATmega16 ... 30
II.3.4 Konfigurasi Pin Mikrokontroler ATmega16 ... 31
II.3.5 Diagram Blok Arsitektur ATmega16 ... 34
II.3.6 General Purpose Register ATmega16 ... 36
II.3.7 Peta Memori ATmega16 ... 36
II.3.8 Port I/O Mikrokontroler ATmega16 ... 38
II.3.9 Pulse Width Modulation (PWM) ... 39
II.4 H-Bridge Motor Driver L298N ... 41
II.5 Photoreflector Hamamatsu P5587 ... 43
II.5.1 Fitur Hamamatsu P5587 ... 44
II.5.2 Konfigurasi Pin Hamamatsu P5587 ... 44
II.5.3 Cara Kerja Hamamatsu P5587 ... 45
II.6 Liquid Crystal Display (LCD) ... 46
II.7 Motor DC ... 48
II.7.1 Konstruksi Motor DC ... 49
II.7.1.1 Stator Motor DC ... 49
II.7.1.2 Rotor atau Jangkar (Armature) Motor DC ... 49
II.7.1.3 Komutator (Commutator) ... 50
II.7.1.4 Sikat (Brush) ... 51
II.7.1.5 Cincin Belah (Slip Rings) ... 51
II.7.3 Karakteristik Motor DC ... 55
BAB III PERANCANGAN DAN REALISASI III.1 Perancangan Sistem Robot Line Follower ... 57
III.2 Perancangan dan Realisasi Robot Line Follower ... 58
III.2.1 Struktur Dasar ... 59
III.2.2 Full Structure ... 62
III.3 Perancangan dan Realisasi Perangkat Keras (Hardware) ... 65
III.3.1 Realisasi Hardware ATmega16 ... 65
III.3.1.1 Rangkaian Clock Generator ... 65
III.3.1.2 Rangkaian Reset ... 66
III.3.1.3 Rangkaian Interface ke I/O ... 66
III.3.2 Realisasi Rangkaian Motor Driver L298N ... 68
III.3.3 Realisasi Rangkaian Sensor Hamamatsu P5587 ... 71
III.3.4 Realisasi Rangkaian Regulator Power Supply ... 73
III.4 Diagram Alir Robot Line Follower ... 74
BAB IV ANALISA DAN DATA PENGAMATAN IV.1 Pengujian Sensor Hamamatsu P5587 ... 76
IV.2 Pengujian Robot Pada Jalur Hitam ... 78
IV.2.1 Pengujian Robot Pada Jalur Hitam Berjarak 1 Meter Tanpa Diberi Gangguan ... 78
IV.2.2 Pengujian Robot Pada Jalur Hitam Berjarak 1 Meter Dengan Lebar Jalur 5 mm ... 80
IV.2.3 Pengujian Robot Pada Jalur Hitam Berjarak 1 Meter Dengan Lebar Jalur 55 mm ... 80
IV.2.4 Pengujian Robot Pada Jalur Hitam Putus Berjarak 1 Meter ... 81
IV.2.4.1 Pengujian Robot Pada Jalur Hitam Putus– Jarak Celah 5 cm ... 82
IV.2.4.3 Pengujian Robot Pada Jalur Hitam Putus–
Jarak Celah 15 cm ... 84 IV.2.4.4 Pengujian Robot Pada Jalur Hitam Putus–
Jarak Celah 20 cm ... 85 IV.2.4.5 Pengujian Robot Pada Jalur Hitam Putus–
Jarak Celah 25 cm ... 86 IV.2.5 Pengujian Robot Pada Jalur Hitam Berjarak 1 Meter Dengan
Diberi Gangguan Berupa Dorongan Berulang ... 87 IV.2.6 Pengujian Robot Pada Jalur Hitam Berjarak 1 Meter Dengan
Posisi Awal Membentuk Sudut Tertentu ... 88 IV.2.7 Pengujian Robot Pada Jalur Hitam Berliku Melingkar ... 90 IV.2.8 Pengujian Robot Pada Jalur Hitam Berliku Patah ... 91
IV.2.8.1 Pengujian Robot Pada Jalur Hitam
Bersudut Lancip - 65º ... 91 IV.2.8.2 Pengujian Robot Pada Jalur Hitam
Bersudut Siku - 90º ... 92 IV.2.8.3 Pengujian Robot Pada Jalur Hitam
Bersudut Tumpul - 135º ... 93 IV.3 Pengujian Robot Pada Lapangan
Kompetisi GALELOBOT 2009 ... 94 IV.3.1 Pengujian Robot Melintasi Jalur Hitam Dari Posisi START
Sampai Posisi Check Point 1 ... 95 IV.3.2 Pengujian Robot Melintasi Jalur Hitam Dari Posisi Check Point 1
Sampai Posisi Check Point 2 ... 97 IV.3.3 Pengujian Robot Melintasi Jalur Hitam Dari Posisi Check Point 2
Sampai Posisi Check Point 3 ... 99 IV.3.4 Pengujian Robot Melintasi Jalur Hitam Dari Posisi Check Point 3
Sampai Posisi Finish ... 101 IV.3.5 Pengujian Robot Melintasi Jalur Hitam Pada MOUNTAIN
IV.3.6 Pengujian Robot Melintasi Jalur Hitam Dari Posisi START
Sampai Posisi FINISH ... 105
BAB V KESIMPULAN DAN SARAN
V.1 Kesimpulan ... 107 V.2 Saran ... 108
DAFTAR PUSTAKA ... 109
LAMPIRAN A FOTO ROBOT LINE FOLLOWER DAN HARDWARE LAMPIRAN B LISTING PROGRAM ATmega16
DAFTAR TABEL
Tabel 2.1 Fungsi Khusus Port B ... 33
Tabel 2.2 Fungsi Khusus Port C ... 33
Tabel 2.3 Fungsi Khusus Port D ... 34
Tabel 2.4 Konfigurasi Pin Out LCD ... 47
Tabel 3.1 Koneksi Pin L298N Dengan Mikrokontroler ATmega16 ... 69
Tabel 3.2 (a) Tabel Kebenaran Untuk Motor DC Kiri ... 70
Tabel 3.2 (b) Tabel Kebenaran Untuk Motor DC Kanan ... 70
Tabel 3.3 Konfigurasi Pin L298N ... 71
Tabel 3.4 Tabel Kebenaran Sensor Hamamatsu P5587 ... 72
Tabel 4.1 Tegangan Keluaran (Vo) dari Sensor Hamamatsu P5587 Pada Bidang Warna Mengkilap ... 77
Tabel 4.2 Tegangan Keluaran (Vo) dari Sensor Hamamatsu P5587 Pada Bidang Warna Pekat ... 77
Tabel 4.3 Pengujian Robot Pada Jalur Hitam Lurus Berjarak 1 Meter Tanpa Diberi Gangguan ... 79
Tabel 4.4 Pengujian Robot Pada Jalur Hitam Lurus Berjarak 1 Meter Dengan Lebar Jalur 5 mm ... 80
Tabel 4.5 Pengujian Robot Pada Jalur Hitam Lurus Berjarak 1 Meter Dengan Lebar Jalur 55 mm ... 81
Tabel 4.6 Pengujian Robot Pada Jalur Hitam Putus– Jarak Celah 5 cm ... 82
Tabel 4.7 Pengujian Robot Pada Jalur Hitam Putus– Jarak Celah 10 cm ... 83
Tabel 4.8 Pengujian Robot Pada Jalur Hitam Putus– Jarak Celah 15 cm ... 84
Tabel 4.10 Pengujian Robot Pada Jalur Hitam Putus–
Jarak Celah 25 cm ... 86
Tabel 4.11 Pengujian Robot Pada Jalur Hitam Lurus Berjarak 1 Meter Dengan Diberi Gangguan Berupa Dorongan Berulang ... 87
Tabel 4.12 Pengujian Robot Pada Jalur Hitam Lurus Berjarak 1 Meter Dengan Posisi Awal Membentuk Sudut Tertentu ... 89
Tabel 4.13 Pengujian Robot Pada Jalur Hitam Berliku Melingkar ... 90
Tabel 4.14 Pengujian Robot Pada Jalur Hitam Bersudut Lancip–65º ... 92
Tabel 4.15 Pengujian Robot Pada Jalur Hitam Bersudut Siku–90º ... 93
Tabel 4.16 Pengujian Robot Pada Jalur Hitam Bersudut Tumpul–135º ... 94
Tabel 4.17 Pengujian Robot Melintasi Jalur Hitam Dari Posisi START Sampai Posisi Check Point 1 ... 95
Tabel 4.18 Pengujian Robot Pada Lintasan START–Check Point 1 ... 96
Tabel 4.19 Pengujian Robot Melintasi Jalur Hitam Dari Posisi Check Point 1 Sampai Posisi Check Point 2 ... 97
Tabel 4.20 Pengujian Robot Pada Lintasan Check Point 1–Check Point 2 98 Tabel 4.21 Pengujian Robot Melintasi Jalur Hitam Dari Posisi Check Point 2 Sampai Posisi Check Point 3 ... 99
Tabel 4.22 Pengujian Robot Pada Lintasan Check Point 2–Check Point 3 100 Tabel 4.23 Pengujian Robot Melintasi Jalur Hitam Dari Posisi Check Point 3 Sampai Posisi FINISH ... 101
Tabel 4.24 Pengujian Robot Pada Lintasan Check Point 3–FINISH ... 102
Tabel 4.25 Pengujian Robot Melintasi Jalur Hitam Pada MOUNTAIN ... 103
Tabel 4.26 Pengujian Robot Pada Lintasan MOUNTAIN ... 104
Tabel 4.27 Pengujian Robot Melintasi Jalur Hitam Dari Posisi START Sampai Posisi FINISH ... 106
DAFTAR GAMBAR
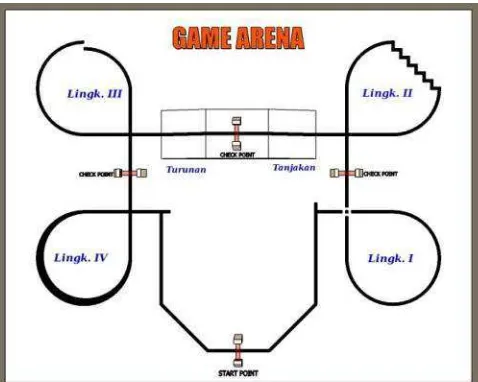
Gambar 1.1 Pola Jalur Hitam Pada Kompetisi GALELOBOT 2009 ... 2
Gambar 2.1 Robot ASIMO dari Honda ... 7
Gambar 2.2 Robot AIBO dari Sony ... 7
Gambar 2.3 Gabungan Fungsi dari Komponen Dasar ... 9
Gambar 2.4 Contoh Robot Dengan 6 Derajat Kebebasan ... 11
Gambar 2.5 Differential Drive ... 14
Gambar 2.6 Tricycle Drive ... 15
Gambar 2.7 Synchronous Drive ... 15
Gambar 2.8 Penggunaan Roda Omni-Directional ... 16
Gambar 2.9 Holonomic Drive ... 16
Gambar 2.10 Kontrol Robot Open Loop ... 21
Gambar 2.11 Kontrol Robot Closed Loop ... 21
Gambar 2.12 Lapangan Kompetisi GALELOBOT 2009 ... 24
Gambar 2.13 Intersection... 24
Gambar 2.14 Junction 1 ... 25
Gambar 2.15 Junction 2 ... 25
Gambar 2.16 1st Circle ... 25
Gambar 2.17 2nd Circle ... 26
Gambar 2.18 3rd Circle ... 26
Gambar 2.19 4th Circle ... 27
Gambar 2.20 Mountain ... 27
Gambar 2.21 Sudut Tanjakan / Turunan 15° ... 27
Gambar 2.22 START - FINISH ... 28
Gambar 2.23 Lapangan Modifikasi ... 28
Gambar 2.24 Konfigurasi Pin ATmega16 ... 32
Gambar 2.25 Diagram Blok Arsitektur ATmega16 ... 35
Gambar 2.26 General Purpose Register ATmega16 ... 36
Gambar 2.28 Peta Memori Data ATmega16 ... 37
Gambar 2.29 Konfigurasi Masukan - Keluaran ... 38
Gambar 2.30 Clear Time On Compare Match ... 39
Gambar 2.31 Phase and Frequency Correct PWM ... 40
Gambar 2.32 Rangkaian H-Bridge ... 41
Gambar 2.33 Rangkaian H-Bridge Dengan Kondisi Motor Berputar Searah Jarum Jam ... 42
Gambar 2.34 Rangkaian H-Bridge Dengan Kondisi Motor Berputar Berlawanan Arah Jarum Jam ... 42
Gambar 2.35 Sensor Photoreflector Hamamatsu P5587 ... 43
Gambar 2.36 Dimensi dari Sensor Hamamatsu P5587 ... 43
Gambar 2.37 Rangkaian Dasar Sensor Photoreflector Hamamatsu P5587 ... 44
Gambar 2.38 Cara Kerja Sensor Hamamatsu P5587 ... 45
Gambar 2.39 Bentuk Fisik LCD 16x2 ... 46
Gambar 2.40 Konstruksi Dasar Motor DC dan Arus yang Bekerja ... 48
Gambar 2.41 Konstruksi Motor Stator Motor DC ... 49
Gambar 2.42 Rotor atau Jangkar Motor DC ... 50
Gambar 2.43 Komutator ... 50
Gambar 2.44 Brush ... 51
Gambar 2.45 Slip Rings Pada Motor DC ... 51
Gambar 2.46 Bagian-bagian Motor DC Secara Lengkap ... 52
Gambar 2.47 Bentuk Fisik Motor DC Beserta Dimensinya ... 52
Gambar 2.48 Aturan Tangan Kanan ... 53
Gambar 2.49 Bentuk Kumparan yang Berputar ... 54
Gambar 2.50 Prinsip Kerja Motor DC ... 54
Gambar 2.51 Perubahan Garis Gaya Medan Magnet ... 55
Gambar 2.52 Grafik Torsi dan Kecepatan ... 55
Gambar 3.1 Blok Diagram Sistem Robot Line Follower ... 57
Gambar 3.2 Basic Structure dari Robot Johny 5–Lynxmotion ... 58
Gambar 3.3 Design Tampak Atas ... 60
Gambar 3.4 Design Tampak Bawah ... 60
Gambar 3.5 Design Tampak Samping Kiri... 61
Gambar 3.6 Design Tampak Samping Kanan... 61
Gambar 3.7 Design Tampak Depan ... 61
Gambar 3.8 Design Tampak Belakang ... 62
Gambar 3.9 Posisi Sensor Hamamatsu P5587 ... 62
Gambar 3.10 Tampak Atas ... 63
Gambar 3.11 Tampak Samping ... 63
Gambar 3.12 Tampak Depan ... 64
Gambar 3.13 Tampak Belakang ... 64
Gambar 3.14 Rangkaian Clock generator... 66
Gambar 3.15 Rangkaian Reset ... 66
Gambar 3.16 Rangkaian Skematik Mikrokontroler ATmega16 ... 68
Gambar 3.17 Rangkaian Skematik Motor Driver L298N ... 69
Gambar 3.18 Rangkaian Skematik Sensor Hamamatsu P5587 ... 71
Gambar 3.19 Rangkaian Skematik Regulator Power Supply ... 73
Gambar 3.20 Diagram Alir dari Robot Line Follower ... 75
Gambar 4.1 Variasi Warna Untuk Sensor Hamamatsu P5587 ... 76
Gambar 4.2 Jalur Hitam Lurus Berjarak 1 Meter ... 79
Gambar 4.3 Pola Gerak Pada Jalur Hitam Lurus Berjarak 1 Meter Tanpa Diberi Gangguan ... 79
Gambar 4.4 Jalur Hitam Putus–Jarak Celah 5 cm ... 82
Gambar 4.5 Jalur Hitam Putus–Jarak Celah 10 cm ... 83
Gambar 4.6 Jalur Hitam Putus–Jarak Celah 15 cm ... 84
Gambar 4.7 Jalur Hitam Putus–Jarak Celah 20 cm ... 85
Gambar 4.9 Pola Gerak Pada Jalur Hitam Lurus Berjarak 1 Meter
Dengan Diberi Gangguan Berupa Dorongan Berulang ... 88
Gambar 4.10 Posisi Awal Robot Membentuk Sudut -45° ... 88
Gambar 4.11 Pola Gerak Pada Jalur Hitam Lurus Berjarak 1 Meter Dengan Posisi Awal Membentuk Sudut -45° ... 89
Gambar 4.12 Jalur Hitam Berliku Melingkar ... 90
Gambar 4.13 Pola Gerak Pada Jalur Hitam Berliku Melingkar ... 91
Gambar 4.14 Jalur Hitam Bersudut Lancip–65º ... 91
Gambar 4.15 Jalur Hitam Bersudut Siku–90º ... 92
Gambar 4.16 Pola Gerak Pada Jalur Hitam Bersudut Siku–90º ... 93
Gambar 4.17 Jalur Hitam Bersudut Tumpul–135º ... 94
Gambar 4.18 Jalur START dengan Check Point 1 ... 95
Gambar 4.19 Pola Gerak Pada Jalur Hitam Dari Posisi START Sampai Posisi Check Point 1 ... 96
Gambar 4.20 Jalur Check Point 1 Dengan Check Point 2 ... 97
Gambar 4.21 Pola Gerak Pada Jalur Hitam Dari Posisi Check Point 1 Sampai Posisi Check Point 2 ... 98
Gambar 4.22 Jalur Check Point 2 Dengan Check Point 3 ... 99
Gambar 4.23 Pola Gerak Pada Jalur Hitam Dari Posisi Check Point 2 Sampai Posisi Check Point 3 ... 100
Gambar 4.24 Jalur Check Point 3 Dengan FINISH ... 101
Gambar 4.25 Pola Gerak Pada Jalur Hitam Dari Posisi Check Point 3 Sampai Posisi FINISH ... 102
Gambar 4.26 Jalur Hitam Pada MOUNTAIN ... 103
Gambar 4.27 Pola Gerak Pada Jalur Hitam MOUNTAIN ... 104
LAMPIRAN A
FOTO ROBOT
&
Realisasi Hardware L298N
Susunan Posisi Sensor Hamamatsu P5587
LAMPIRAN B
/***************************************************** This program was produced by the
CodeWizardAVR V1.25.3 Professional Automatic Program Generator
© Copyright 1998-2007 Pavel Haiduc, HP InfoTech s.r.l. http://www.hpinfotech.com
}
// Declare your global variables here void main(void)
{
// Declare your local variables here // Input/Output Ports initialization // Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=Out Func6=Out Func5=In Func4=Out Func3=Out Func2=Out Func1=Out Func0=In // State7=0 State6=0 State5=T State4=0 State3=0 State2=0 State1=0 State0=T
PORTB=0x00; DDRB=0xDE; // Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTC=0x00;
DDRC=0x00;
// Port D initialization
// Func7=Out Func6=In Func5=Out Func4=Out Func3=Out Func2=Out Func1=In Func0=In // State7=0 State6=T State5=0 State4=0 State3=0 State2=0 State1=T State0=T
PORTD=0x00; DDRD=0xBC;
// Mode: Phase correct PWM top=FFh // OC0 output: Non-Inverted PWM TCCR0=0x65;
TCNT0=0x00; OCR0=0x00;
// Timer/Counter 1 initialization // Clock source: System Clock // Clock value: Timer 1 Stopped // Mode: Normal top=FFFFh // OC1A output: Discon. // OC1B output: Discon. // Noise Canceler: Off
// Input Capture on Falling Edge // Timer 1 Overflow Interrupt: Off // Input Capture Interrupt: Off // Compare A Match Interrupt: Off // Compare B Match Interrupt: Off TCCR1A=0x00;
// Timer/Counter 2 initialization // Clock source: System Clock // Clock value: 10.800 kHz
// Mode: Phase correct PWM top=FFh // OC2 output: Non-Inverted PWM ASSR=0x00;
TCCR2=0x67; TCNT2=0x00; OCR2=0x00;
// External Interrupt(s) initialization // INT0: Off
MCUCR=0x00; MCUCSR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization TIMSK=0x00;
// Analog Comparator initialization // Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off ACSR=0x80;
SFIOR=0x00;
// LCD module initialization lcd_init(16);
while (1) {
PORTB = PINA;
if (PINA.7==0 && PINA.6==0 && PINA.4==0 && PINA.2==1 && PINA.1==1) // kanan hitam {
belok_kanan(); delay_ms(150); }
if (PINA.7==0 && PINA.6==0 && PINA.4==0 && PINA.2==0 && PINA.1==1) // kanan hitam {
belok_kanan(); delay_ms(150); }
if (PINA.7==1 && PINA.6==1 && PINA.4==0 && PINA.2==0 && PINA.1==0) // kiri hitam {
belok_kiri(); delay_ms(150); }
if (PINA.4==0) // tengah hitam {
maju(); }
else if (PINA.7==0 && PINA.6 ==0 && PINA.4==0 && PINA.2==0 && PINA.1==0) // {
{
belok_kanan(); delay_ms(100); }
else if (PINA.2==0) // kiri hitam {
belok_kiri(); delay_ms(100); }
else if (PINA.7==0) // kanan luar hitam {
belok_kanan(); }
else if (PINA.1==0) // kiri luar hitam {
belok_kiri(); }
else {
maju(); }
LAMPIRAN C
LAMPIRAN D
BAB I PENDAHULUAN
Bab ini akan membahas mengenai latar belakang, identifikasi masalah, tujuan, pembatasan masalah, metodologi penelitian yang digunakan, spesifikasi alat dan sistematika penulisan.
I.1 Latar Belakang
Dengan seiringnya perkembangan teknologi dan industri, manusia semakin meningkatkan kreasinya untuk menciptakan sesuatu yang baru dengan tujuan meningkatkan kualitas hidup manusia. Sebagai contoh, perkembangan dan penggunaan robot. Pada bidang industri saat ini, pengembangan dalam bidang robotik meningkat pesat. Hal ini dikarenakan kinerja robot yang efektif dan efisien jika dibandingkan dengan tenaga kerja manusia.
Salah satu aplikasi dari sistem kendali otomatis sederhana adalah robot line follower. Pengembangan teknologi yang berbasis mikrokontroler dan
mikroprosesor dalam pembuatan robot ini dapat dijadikan dasar untuk menciptakan aplikasi-aplikasi yang lebih kompleks, seperti pengontrol pada mesin-mesin industri.
Mobilisasi suatu barang hasil produksi adalah kebutuhan yang cukup penting. Pemindahan dan penyimpanan barang dari suatu posisi ke posisi yang lain membutuhkan suatu perangkat yang mampu bekerja dengan cepat dan tepat. Salah satu penyelesaian dari masalah ini yaitu dengan merealisasikan prototip robot pengikut garis. Robot ini diharapkan dapat memobilisasi barang dengan lebih cepat dan tepat.
Sehubungan dengan masalah diatas, topik ini diajukan dalam rangka mengikuti kompetisi robot pengikut jalur GALELOBOT 2009 (Ganesha Line Follower Robot 2009). Kompetisi ini bertemakan “Cruishing on The Right Path
BAB I PENDAHULUAN 2
I.2 Idenifikasi Masalah
Identifikasi masalah dalam Tugas Akhir ini adalah bagaimana merancang dan merealisasikan robot pengikut jalur (Line Follower Robot) untuk Kompetisi GALELOBOT 2009.
I.3 Tujuan
Tujuan yang ingin dicapai dalam Tugas Akhir ini adalah merancang dan merealisasikan robot pengikut jalur untuk Kompetisi GALELOBOT 2009.
I.4 Pembatasan Masalah
Dalam pelaksanaan Tugas Akhir ini, persoalan mengenai robot pengikut jalur yang dihadapi sangatlah luas. Oleh karena itu, pembatasan masalah mencakup hal-hal berikut :
1. Lebar jalur hitam : 18mm ± 1mm.
2. Panjang lintasan total : ± 12.210 m. 3. Sudut tanjakan : 15± 1.
4. Pola jalur hitam yang akan dilalui robot pada Kompetisi GALELOBOT 2009 ditunjukkan oleh Gambar 1.1 dibawah ini.
BAB I PENDAHULUAN 3
5. Dimensi robot dibatasi : 20cm x 20cm x 20cm. 6. Bobot maksimum robot : 3.00 kg.
7. Robot berjalan secara autonomous tanpa bantuan operator, receiver-transmitter, dan device-device interface human to robot lainnya.
8. Mampu beradaptasi dengan kondisi pencahayaan ruangan.
I.5 Metodologi Penelitian
Metodologi yang diterapkan pada Tugas Akhir ini bersifat eksperimental dengan langkah-langkah sebagai berikut :
1. Pengenalan mengenai robot pengikut jalur beserta komponen robot. 2. Perancangan dan realisasi perangkat keras dari robot.
3. Pembuatan program. 4. Pengujian robot. 5. Pengambilan data. 6. Pembuatan laporan.
I.6 Spesifikasi Alat
Prototip dari robot pengikut garis ini dirancang dan direalisasikan dengan spesifikasi sebagai berikut :
1. Robot ini menggunakan ATmega16 sebagai mikrokontroler. 2. Sistem kontrol berbasis AVR.
3. Menggunakan 2 buah motor DC + gearbox sebagai penggerak robot. 4. Menggunakan baterai kering Li-Ion 3.6 Volt 2350 mAh sebanyak 4 buah. 5. Menggunakan sensor optik Hamamatsu P5587 sebanyak 5 buah.
BAB I PENDAHULUAN 4
I.7 Sistematika Penulisan
Agar penulisan laporan Tugas Akhir ini teratur dan terarah, maka penulisan laporan dibagi menjadi 5 bagian besar berikut ini :
BAB I–PENDAHULUAN
Pada bab ini akan dibahas mengenai latar belakang, identifikasi masalah, tujuan, pembatasan masalah, metodologi penelitian, spesifikasi alat dan sistematika penulisan.
BAB II–LANDASAN TEORI
Pada bab ini dibahas tentang teori-teori penunjang dalam pelaksanaan Tugas Akhir ini. Teori tersebut adalah teori-teori dasar mengenai robotika, sensor optik Hamamatsu P5587, mikrokontroler Atmega16, H-Bridge L298N motor driver dan motor DC.
BAB III–PERANCANGAN DAN REALISASI
Bab ini akan membahas tentang perancangan robot pengikut jalur mulai dari sketsa awal hingga bentuk jadi perangkat keras. Dilanjutkan dengan perancangan sistem mikrokontroler dan sensor. Setelah itu, pembuatan perangkat lunak yang meliputi flowchart dan program.
BAB IV–PENGUJIAN ROBOT
Bab ini membahas tentang cara pengujian robot kemudian dilakukan pengambilan data pengamatan. Terakhir, dilakukan analisa terhadap data yang sudah diambil meliputi perangkat keras dan perangkat lunak.
BAB V–KESIMPULAN DAN SARAN
BAB V
KESIMPULAN DAN SARAN
Bab ini akan membahas mengenai kesimpulan dari Robot Line Follower dalam Tugas Akhir ini. Disertai juga saran-saran yang perlu dilakukan untuk perbaikan di masa yang akan mendatang.
V.1 Kesimpulan
Dalam merealisasikan dan memprogram robot line follower untuk melewati suatu jalur hitam dengan beberapa variasi hambatan jalur dan berdasarkan analisa pada data pengamatan, maka dapat disimpulkan beberapa hal sebagai berikut :
1. Sensor Hamamatsu P5587 hanya dapat digunakan sebagai pendeteksi bidang hitam atau putih dan tidak bisa digunakan sebagai sensor warna. 2. Robot Line Follower untuk mengikuti Kompetisi GALELOBOT 2009
sudah berhasil direalisasikan.
3. Keberhasilan robot line follower dalam melintasi jalur hitam pada Lapangan Kompetisi GALELOBOT 2009, adalah sebagai berikut :
• Pada jalur antara posisi START sampai posisi Check Point 1 diperoleh persentase keberhasilan sebesar 100% dengan rata-rata kelajuan sebesar 4.82 cm/s.
• Pada jalur antara posisi Check Point 1 sampai posisi Check Point 2 diperoleh persentase keberhasilan sebesar 100% dengan rata-rata kelajuan sebesar 5.48 cm/s.
• Pada jalur antara posisi Check Point 2 sampai posisi Check Point 3 diperoleh persentase keberhasilan sebesar 60% dengan rata-rata kelajuan sebesar 6.25 cm/s.
BAB V KESIMPULAN DAN SARAN 108
• Pada jalur hitam mountain diperoleh persentase keberhasilan sebesar 80% dengan rata-rata kelajuan sebesar 5.14 cm/s.
• Pada jalur antara posisi START sampai posisi FINISH diperoleh persentase keberhasilan sebesar 80% dengan rata-rata kelajuan robot sebesar 5.24 cm/s.
V.2 Saran
Saran-saran yang dapat diberikan dalam hal untuk perbaikan dan pengembangan robot line follower dalam Tugas Akhir ini di masa yang akan datang adalah sebagai berikut :
1. Dapat mengganti tracker dengan roda agar pergerakan robot lebih lincah dengan tetap mempertimbangkan kestabilan robot dan kemampuan untuk melintasi bidang yang menanjak atau menurun.
DAFTAR PUSTAKA
1. Andrianto, Heri. Pemrograman Mikrokontroler AVR ATMEGA16 Menggunakan Bahasa C (CodeVision AVR). Bandung : Informatika. 2008. 2. Chanda, Ratana. Realisasi Robot Cerdas Pemadam Api Lilin Dengan
Konfigurasi Lapangan Yang Berubah-Ubah. Bandung : Universitas Kristen Maranatha. 2009.
3. Kurnia, Jonatan. Realisasi Robot Mobil Tank Untuk Menjelajahi Medan Yang Tidak Rata. Bandung : Universitas Kristen Maranatha. 2008.
4. Pitowarno, Endra. ROBOTIKA : Design, Kontrol, dan Kecerdasan Buatan. Yogyakarta : ANDI. 2006.
5. Sandy, Halim,. ST. Merancang Robot Pembawa Objek Menggunakan ooPIC-R. Jakarta : PT. Elex Media Komputindo. 2007.
6. Sigit, Riyanto. Robotika, Sensor, Dan Aktuator, Edisi ke-1, Yogyakarta : Graha Ilmu. 2007.
7. Wahyudi, Totok. Realisasi Prototipe Robot Pengikut Jalur Hitam. Bandung : Universitas Kristen Maranatha. 2008.