TUGAS AKHIR
RANCANG BANGUN ALAT PENGUKUR LAJU KENDARAAN
BERBASIS MIKROKONTROLER ATMEGA 8
Diajukan sebagai salah satu syarat menempuh ujian Sarjana Strata 1 (S1)
pada program studi Teknik Elektro
Disusun Oleh :
INDRA PURNAMA
13106001
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
BANDUNG
ABSTRAK
Pada tugas akhir ini dirancang sebuah alat yang berfungsi sebagai pengukur laju setiap
kendaraan yang melintas di jalan bebas hambatan berbasis mikrokontroler AVR ATMEGA8.
Alat ini terdiri dari dua buah sensor cahaya (LDR) dan dua buah pemancar cahaya (Laser) yang
berfungsi untuk mendeteksi adanya kendaraan yang melintas. Dengan jarak kedua sensor adalah
2 meter, kecepatan suatu kendaraan dapat di ukur dengan menggunakan hukum Gerak Lurus
Beraturan (GLB) yaitu kecepatan sama dengan jarak dibagi waktu. Waktu dapat dihitung
menggunakan Timer0 pada mikrokontroler. Ketika sensor 1 terhalang oleh kendaraan, maka
timer akan diaktifkan kemudian ketika sensor 2 terhalang maka timer akan dimatikan. Waktu
tempuh adalah selisih nilai waktu sensor 2 dikurangi waktu sensor 1. Data kecepatan hasil
pengukuran akan ditampilkan pada komputer menggunakan perangkat lunak java yang dikirim
melalui media bluetooth.
ABSTRACT
In this final task is designed a tool that serves as measuring the rate of each vehicle passing on
the free way road-based microcontroller AVR ATMEGA8. This device consists of two pieces of
light sensors and two light emitting which serves to detect passing vehicles. With the distance of
both sensor is two meters, speed of vehicle can be measured by using a GLB law, that is a
velocity equals the distance diveded by time. Time can be calculated using timer0 at the
microcontroller, when the sensor one is blocked by vehicles then the timer will be activated, then
when sensor two is blocked then the timer will be off. Time is difference in value of sensor two
minus by sensor one, speed measurement result data will be displayed on a computer using java
software delivered through the media of bleutooth.
Dengan meny puji dan syukur penu melimpahkan rahmat menyelesaikan tugas Kendaraan Berbasis tugas akhir ini adal merupakan salah satu Elektro Universitas K
Penulis meny dikarenakan keterbat sistematika penulisan Walaupun demikian, yang bermanfaat bagi
Pada kesempa pihak yang telah me kepada :
1. Bapak Dr. Ir Bandung. 2. Bapak Dr. Ar
Komputer UN 3. Bapak Muha UNIKOM Ban 4. Ibu Tri Raha
Studi Teknik E
ii
KATA PENGANTAR
nyebut nama Allah Yang Maha Pengasih lagi nulis panjatkan kehadirat Allah Subhannahu W
at serta hidayah-Nya kepada penulis, sehin as akhir yang diberi judul ”Rancang Bangun A
is Mikrokotroler Atmega8”. Adapun maksud dalah bertujuan untuk menyelesaikan studi atu syarat dalam menempuh ujian sarjana pro Komputer Indonesia (UNIKOM) Bandung.
nyadari bahwa tugas akhir ini masih jauh d batasan penulis, baik dalam penyajian mate isan, sumber bacaan, pengetahuan dan pe n, penulis telah berusaha dan mencoba mem gi penulis khusunya dan bagi pembaca umumn
patan ini, tidak lupa penulis ucapkan terimak membantu kelancaran dalam penyelesaian lap
Ir. Eddy Suryanto Soegoto, M.Sc sebagai
Arry Ahmad Arman sebagai Dekan Fakulta NIKOM Bandung.
hammad Aria, MT. Sebagai Ketua Jurusa andung dan pembimbing penulis tugas akhir in hajoeningroem, MT sebagai Koordinator Tu k Elektro UNIKOM Bandung.
agi Maha Penyayang, Wata’ala yang telah hingga penulis dapat n Alat Pengukur Laju sud dari penyusunan di program S1 dan program studi Teknik
dari kata sempurna, ateri, maupun dalam pengalaman penulis. mberikan karya tulis
nya.
akasih kepada semua laporan ini, terutama
ai Rektor UNIKOM
ltas Teknik dan Ilmu
usan Teknik Elektro r ini.
iii
5. Bapak dan Ibu Dosen Jurusan Teknik Elektro UNIKOM Bandung yang telah membekali ilmu pengetahuan kepada penulis selama menuntut ilmu di UNIKOM Bandung.
6. Ibu Mery selaku sekretaris Jurusan Program Studi Teknik Elektro UNIKOM Bandung.
7. Bapak Ir. Samuel Christianto Tjahyadi Selaku Managing Director NEXTSYSTEM Robotic Learning yang telah memberikan pelatihan serta bimbingan kepada penulis.
8. Kedua Orang Tuaku serta Keluargaku yang selalu memberikan dorongan moril dan materi serta do’a kepada penulis selama mengikuti perkuliahan di UNIKOM Bandung.
9. Keluarga besar Eceng Gondok, yang telah menjadi sahabat penulis dalam suka dan duka selama mengikuti perkuliahan di Jurusan Teknik Elektro UNIKOM Bandung.
10. My beloved girl, Yohana yang telah mendukung dan memberikan support selama studi.
Akhir kata dengan kerendahan hati, penulis memanjatkan do’a kehadirat Allah Subhanahu Wata’ala semoaga amal dan baik budi yang telah mereka berikan kepada penulis mendapat pahala dari-Nya. Amin.
Bandung, Agustus 2011
BAB I
PENDAHULUAN
1.1. Latar Belakang
Kemajuan ilmu pengetahuan dan teknologi memberikan dampak yang signifikan terhadap dunia otomotif khususnya kendaraan roda empat. Kemampuan dalam hal kecepatan menjadi prioritas yang selalu diutamakan dalam meraih pasar. Hampir semua produk terbaru kendaraan bermotor roda empat kecepatannya mengalami peningkatan. Terlebih dengan adanya jalan bebas hambatan (jalan tol), ajang untuk mencoba kemampuan kendaraan pun semakin terbuka. Oleh karena itu, banyak pengemudi kendaraan roda empat yang selalu ingin memacu kendaraannya hingga melampaui batas maksimum kecepatan yang telah ditentukan.
Untuk dapat memantau kendaraan yang melintas di jalan tol dalam maupun luar kota dengan kecepatan yang telah ditentukan, maka dibutuhkan suatu alat yang dapat mengukur laju suatu kendaraan. Dalam tugas akhir ini, penyusun mencoba merancang dan membuat sebuah alat pengukur laju kendaraan berbasis mikrokontroler AVR Atmega8 serta menampilkannya menggunakan perangkat lunak Javapada komputer.
1.2. Definisi Masalah
Permasalahan yang terjadi adalah kurangnya kesadaran masyarakat dalam mengendarai kendaraan roda empat di jalan bebas hambatan, serta minimnya alat yang berfungsi untuk mengukur laju setiap kendaraan yang melintas di jalan tersebut, sehingga tidak dapat ditentukan kecepatan setiap kendaraannya.
1.3. Rumusan Masalah
1.4. Tujuan Penelitian
Tujuan pembuatan tugas akhir ini adalah untuk membuat alat pengukur laju kendaraan yang berbasis mikrokontroler, dan mengaplikasikan perangkat lunak Java sebagai program interface untuk menampilkan kecepatan laju suatu kendaraan serta bagaimana cara mengirimkan data hasil pengukuran dengan menggunakan bluetooth.
1.5. Batasan Masalah
Pada tugas akhir ini ada beberapa hal yang dibatasi antara lain :
1. Jarak sensor 1 dan sensor 2 adalah 2 meter.
2. Area yang digunakan adalah jalan bebas hambatan dan hanya satu jalur. 3. Objek yang digunakan adalah kendaraan yang sesungguhnya.
1.6. Kegunaan Penelitian
1.7. Sistematika Penulisan
Sistematika penulisan pada tugas akhir ini terdiri dari V (lima) bab, dengan masing-masing bab adalah sebagai berikut :
BAB I Pendahuluan
Berisikan latar belakang masalah, definisi masalah, rumusan masalah, tujuan penelitian, batasan masalah, kegunaan penelitian dan sistematika penulisan.
BAB II Dasar Teori
Bab ini berisikan tentang teori-teori yang melandasi serta berhubungan dengan penelitian.
BAB III Perencanaan dan Pembuatan Alat
Bab ini menjelaskan mengenai tahapan-tahapan pembuatan alat, cara kerja alat, sinkronisasi antara alat dengan program tampilan java yang terhubung melalui media bletooth.
BAB IV Pengujian dan Analisa
Bab ini menjelaskan tentang pengujian alat, pengambilan data, serta melakukan perbandingan antara hasil pengukuran dengan kecepatan yang sesungguhnya dengan menghitung persentase kesalahan alat.
BAB V Penutup
BAB II
DASAR TEORI
2.1 Mikrokontroler AVR Atmega8
AVR merupakan salah satu jenis mikrokontroler yang di dalamnya
terdapat berbagai macam fungsi. Perbedaannya pada mikro yang pada umumnya
digunakan seperti MCS51 adalah pada AVR tidak perlu menggunakan oscillator
eksternal karena di dalamnya sudah terdapat internal oscillator. Selain itu
kelebihan dari AVR adalah memiliki Power-On Reset, yaitu tidak perlu ada
tombol reset dari luar karena cukup hanya dengan mematikan supply, maka secara
otomatis AVR akan melakukan reset. Untuk beberapa jenis AVR terdapat
beberapa fungsi khusus seperti ADC, EEPROM sekitar 128 byte sampai dengan
512 byte.
AVR ATmega8 adalah mikrokontroler CMOS 8-bit berarsitektur AVR
RISC yang memiliki 8K byte in-System Programmable Flash. Mikrokontroler
dengan konsumsi daya rendah ini mampu mengeksekusi instruksi dengan
kecepatan maksimum 16MIPS pada frekuensi 16MHz. Jika dibandingkan dengan
ATmega8L perbedaannya hanya terletak pada besarnya tegangan yang diperlukan
untuk bekerja. Untuk ATmega8 tipe L, mikrokontroler ini dapat bekerja dengan
tegangan antara 2,7 - 5,5 V sedangkan untuk ATmega8 hanya dapat bekerja pada
2.1.1 Konfigurasi Pin Atmega8
Gambar 2.1. Konfigurasi Pin Atmega8
ATmega8 memiliki 28 Pin, yang masing-masing pin nya memiliki fungsi
yang berbeda-beda baik sebagai port maupun fungsi yang lainnya. Berikut akan
dijelaskan fungsi dari masing-masing kaki ATmega8.
VCC
Merupakan supplytegangan digital.
GND
Merupakan ground untuk semua komponen yang membutuhkan grounding.
Port B (PB7...PB0)
Didalam Port B terdapat XTAL1, XTAL2, TOSC1, TOSC2. Jumlah Port B
adalah 8 buah pin, mulai dari pin B.0 sampai dengan B.7. Tiap pin dapat
digunakan sebagai input maupun output. Port B merupakan sebuah 8-bit
yang terdapat pada port B yang secara eksternal diturunkan, maka akan
mengeluarkan arus jika pull-up resistor diaktifkan. Khusus PB6 dapat
digunakan sebagai input Kristal (inverting oscillator amplifier) dan input ke
rangkaian clock internal, bergantung pada pengaturan Fuse bit yang
digunakan untuk memilih sumber clock. Sedangkan untuk PB7 dapat
digunakan sebagai output Kristal (output oscillator amplifier) bergantung
pada pengaturan Fuse bit yang digunakan untuk memilih sumber clock. Jika
sumber clock yang dipilih dari oscillator internal, PB7 dan PB6 dapat
digunakan sebagai I/O atau jika menggunakan Asyncronous Timer/Counter2
maka PB6 dan PB7 (TOSC2 dan TOSC1) digunakan untuk saluran input
timer.
Port C (PC5…PC0)
Port C merupakan sebuah 7-bit bi-directionalI/O port yang di dalam
masing-masing pin terdapat pull-upresistor. Jumlah pin nya hanya 7 buah mulai dari
pin C.0 sampai dengan pin C.6. Sebagai keluaran/output port C memiliki
karakteristik yang sama dalam hal menyerap arus (sink) ataupun
mengeluarkan arus (source).
RESET/PC6
Jika RSTDISBL Fusediprogram, maka PC6 akan berfungsi sebagai pinI/O.
Pin ini memiliki karakteristik yang berbeda dengan pin-pin yang terdapat
pada port C lainnya. Namun jika RSTDISBL Fuse tidak diprogram, maka
pin ini akan berfungsi sebagai input reset. Dan jika level tegangan yang
minimum, maka akan menghasilkan suatu kondisi reset meskipun clock-nya
tidak bekerja.
Port D (PD7…PD0)
Port D merupakan 8-bit bi-directional I/O dengan internal pull-up resistor.
Fungsi dari port ini sama dengan port-port yang lain. Hanya saja pada port ini
tidak terdapat kegunaan-kegunaan yang lain. Pada port ini hanya berfungsi
sebagai masukan dan keluaran saja atau biasa disebut dengan I/O.
AVcc
Pin ini berfungsi sebagai supply tegangan untuk ADC. Untuk pin ini harus
dihubungkan secara terpisah dengan VCC karena pin ini digunakan untuk
analog saja. Bahkan jika ADC pada AVR tidak digunakan tetap saja
disarankan untuk menghubungkannya secara terpisah dengan VCC. Jika
ADC digunakan, maka AVcc harus dihubungkan ke VCC melalui low pass
filter.
AREF
Gambar 2.2 Blok Diagram ATmega8
Pada AVR status register mengandung beberapa informasi mengenai hasil
dari kebanyakan hasil eksekusi instruksi aritmatik. Informasi ini digunakan untuk
altering arus program sebagai kegunaan untuk meningkatkan performa
pengoperasian. Register ini di-update setelah operasi ALU (Arithmetic Logic
Unit) hal tersebut seperti yang tertulis dalam datasheet khususnya pada bagian
penggunaan kebutuhan instrukasi perbandingan yang telah didedikasikan serta
dapat menghasilkan peningkatan dalam hal kecepatan dan kode yang lebih
sederhana dan singkat. Register ini tidak secara otomatis tersimpan ketika
memasuki sebuah rutin interupsi dan juga ketika menjalankan sebuah perintah
setelah kembali dari interupsi. Namun hal tersebut harus dilakukan melalui
software. Berikut adalah gambar status register.
I T H S V N Z C
Gambar 2.3 Status Register ATMega8
Bit 7(I)
Merupakan bit Global Interrupt Enable. Bit ini harus di-set agar semua
perintah interupsi dapat dijalankan. Untuk perintah interupsi individual akan
di jelaskan pada bagian yang lain. Jika bit ini di-reset, maka semua perintah
interupsi baik yang individual maupun yang secara umum akan di abaikan.
Bit ini akan dibersihkan atau clearedoleh hardwaresetelah sebuah interupsi
di jalankan dan akan di-setkembali oleh perintah RETI. Bitini juga dapat
di-set dan di-resetmelalui aplikasi dan intruksi SEI dan CLL.
Bit 6(T)
Merupakan bit Copy Storage. Instruksi bit Copy Instructions BLD (Bit Load)
and BST (Bit Store) menggunakan bit ini sebagai asal atau tujuan untuk bit
yang telah dioperasikan. Sebuah bit dari sebuah registerdalam Register File
7 6 5 4 3 2 1 0
R/W R/W R/W R/W R/W R/W R/W R/W
0 0 0 0 0 0 0 0
Bit
Read/write
Initial Value
dapat disalin ke dalam bit ini dengan menggunakan instruksi BST, dan
sebuah bitdi dalam bit ini dapat disalin ke dalam bit di dalam registerpada
Register Filedengan menggunakan perintah BLD.
Bit 5(H)
Merupakan bit Half Carry Flag. Bit ini menandakan sebuah Half Carry
dalam beberapa operasi aritmatika. Bit ini berfungsi dalam aritmatika BCD.
Bit 4(S)
Merupakan Sign bit. Bit ini selalu merupakan sebuah ekslusif di antara
Negative Flag(N) dan two’s Complement Overflow Flag (V).
Bit 3(V)
Merupakan bit Two’s Complement Overflow Flag. Bit ini menyediakan
fungsi aritmatika dua komplemen.
Bit 2(N)
Merupakan bit Negative Flag. Bit ini mengindikasikan sebuah hasil negative
di dalam sebuah fungsi logika atai aritmatika.
Bit 1(Z)
Merupakan bit Zero Flag. Bit ini mengindikasikan sebuah jasil nol “0” dalan
sebuah fungsi aritmatika atau logika.
Bit 0(C)
Merupakan bit Carry Flag. Bit ini mengindikasikan sebuah Carry atau sisa
Data Memory $000 $0000 $001F $0020 $005F $0060 $000 E_END F_END RAMEND
2.1.2 Memori AVR Atmega
Gambar 2.4 Peta Memori Atmega
Memori atmega terbagi menjadi tiga yaitu :
1. Memori Flash
Memori flash adalah memori ROM tempat kode-kode program
berada. Kata flash menunjukan jenis ROM yng dapat ditulis dan
dihapus secara elektrik. Memori flash terbagi menjadi dua bagian
yaitu bagian aplikasi dan bagian boot. Bagian aplikasi adalah
bagian kode-kode program apikasi berada. Bagian boot adalah
bagian yang digunakan khusus untuk booting awal yang dapat
diprogram untuk menulis bagian aplikasi tanpa melalui
2. Memori Data
Memori data adalah memori RAM yang digunakan untuk
keperluan program. Memori data terbagi menjadi empat bagian
yaitu :
32 GPR (General Purphose Register) adalah register khusus yang
bertugas untuk membantu eksekusi program oleh ALU
(Arithmatich Logic Unit), dalam instruksi assembler setiap
instruksi harus melibatkan GPR. Dalam bahasa C biasanya
digunakan untuk variabel global atau nilai balik fungsi dan
nilai-nilai yang dapat memperingan kerja ALU. Dalam istilah processor
komputer sahari-hari GPR dikenal sebagai “chace memory”.
I/O register dan Aditional I/O register adalah register yang
difungsikan khusus untuk mengendalikan berbagai pheripheral
dalam mikrokontroler seperti pin port, timer/counter, usart dan
lain-lain. Register ini dalam keluarga mikrokontrol MCS51 dikenal
sebagi SFR(Special Function Register).
3. EEPROM
EEPROM adalah memori data yang dapat mengendap ketika chip
mati (off), digunakan untuk keperluan penyimpanan data yang
2.1.3 Timer/Counter0
Timer/counter0 adalah sebuah timer/counteryang dapat mencacah sumber
pulsa/clock baik dari dalam chip (timer) ataupun dari luar chip (counter) dengan
kapasitas 8-bitatau 256 cacahan.
Timer/counterdapat digunakan untuk :
1. Timer/counterbiasa
2. Clear Timer on Compare Match(selain Atmega 8)
3. Generatorfrekuensi (selain Atmega 8)
4. Counterpulsa eksternal
2.1.4 Komunikasi Serial Pada Atmega 8
Mikrokontroler AVR Atmega 8 memiliki Port USART pada Pin 2 dan Pin
3 untuk melakukan komunikasi data antara mikrokontroler dengan mikrokontroler
ataupun mikrokontroler dengan komputer. USART dapat difungsikan sebagai
transmisi data sinkron, dan asinkron. Sinkron berarti clockyang digunakan antara
transmiterdan receiver satu sumber clock. Sedangkan asinkron berarti transmiter
dab receiver mempunyai sumber clock sendiri-sendiri. USART terdiri dalm tiga
Gambar 2.5 Blok USART
2.1.4.1 Clock Generator
Clock generatorberhubungan dengan kecepatan transfer data (baud rate),
register yang bertugas menentukan baud rateadalah register pasangan
Tabel 2.1 Baud Rate
Operating Mode Equation for Calculating Baud Rate
Equaltion for Calculating UBRR Value Asynchronous
Normal Mode
(U2X = 0) = 6 + − = 6 −
Asynchronous Double Speed
Mode (U2X=1) = 8 + − = 8 −
Synchronous
Dimana :
Foscadalah frekuensi ossilator yang digunakan
BAUD adalah transfer bit per detik
2.1.4.2 USART transmiter
Usart transmiter berhubungan dengan data pada Pin TX. Perangkat yang
sering digunakan seperti register UDR sebagi tempat penampungan data yang
akan ditransmisikan. FlagTXC sebagai akibat dari data yang ditransmisikan telah
sukses (complete), dan flag UDRE sebagai indikator jika UDR kosong dan siap
untuk diisi data yang akan ditransmisikan lagi.
2.1.4.3 USART receiver
Usart receiver berhubungan dengan penerimaan data dari Pin RX.
Perangkat yang sering digunakan seperti register UDR sebagai tempat penampung
data yang telah diterima, dan flag RXC sebagi indikator bahwa data telah sukses
(complete) diterima.
2.1.5 Arduino Severino Atmega8
Arduino adalah solusi terpaket yang terdiri dari board hardware dengan
dengan mikrokontroler AVR serta software yang dikembangkan menggunakan
bahasa Java dan menggunakan bahasa C sebagai rujukan dalam pemrograman.
Arduino severino adalah board Arduino single sidedversi lama dengan koneksi
Serial RS232. Versi terakhir (S3V3) dirancang oleh Adilson Akashi, dengan
Gambar 2.6 Arduino Severino ATMega8
Gambar 2.7 Bagian-Bagian Arduino yang digunakan
Keterangan :
A Koneksi Serial RS232 yang digunakan untuk menghubungkan MCU dengan Komputer
B Power jack dengan tegangan DC sebesar +9v C Chip ATMega8
A
B
C
D E
F
D Pin-pin digital input/output dengan Pin 0 sebagai Rx dan Pin 1 sebagai Tx
E Pin-pin digital input/output8 – 13 F LED Power
G Pin jumper, pada posisi 2-3, maka serial dapat digunakan (serial enable), selanjutnya pada posisi 1-2, akan menonaktifkan komunikasi
serial dan mengaktifkan external pull-down resistor pada pin 0 (Rx) dan
pin 1 (Tx).
2.1.6 Struktur Pemrograman Arduino
Struktur dasar bahasa pemrograman arduino hanya terdiri dari dua bagian
1. Setup()
Fungsi setup() hanya dipanggil satu kali ketika program pertama kali
di jalankan. Ini digunakan untuk mendifinisikan mode pin atu memulai
komunikasi serial. Fungsi setup() harus di ikut sertakan dalam program
walaupun tidak ada statement yang di jalankan.
Void setup() {
// Statement; di eksekusi satu kali }
Void loop() {
pinMode()= berfungsi untuk mengatur fungsi sebuah pin sebagai INPUT atau OUTPUT.
Serial.begin(9600) = digunakan untuk mengaktifkan fitur UART dan menginisialisasinya.
2. Loop()
Setelah melakukan fungsi setup() maka secara langsung akan
melakukan fungsi loop() secara berurutan dan melakukan
instruksi-instruksi ayang ada dalam fungsi loop().
digitalWrite()= Berfungsi untuk memberikan nilai LOWatau HIGH pada sebuah pin OUTPUT
voidsetup() {
pinMode(3,OUTPUT);// men-set “pin” 3 sebagai Output pinMode(6, INPUT); // men-set pin 6 sebagai Input Serial.begin(9600);
}
void loop() {
If (digitalRead(6)==HIGH)// membaca input digital pin 6 {
xstart = millis(); //aktifkan timer digitalWrite(3, HIGH); // nyalakan pin 3
delay(1000); // pause selama 1 detik digitalWrite(3, LOW); // matikan pin 3
Fungsi delay= Berfungsi untuk memberikan jeda dalam satuan milidetik
digitalRead()= Berfungsi untuk membaca nilai digital LOWatau HIGH dari sebuah pin INPUT
Fungsi milis()akan memberikan posisi “Stopwatch” terakhir yang bekerja dalam system
Stopwatchbekerja dalam satuan milidetik, menggunakan TIMER0
dan mencatatnya dalam variabel unsigned long timer0_overflow_count.
Hitungan akan overflow setelah mencapai 4,294,967,295 (2^32-1)
2.2 Jarak
Jarak merupakan panjang lintasan yang ditempuh oleh suatu benda dalam
selang waktu tertentu. Jarak juga bisa menyatakan posisi suatu benda terhadap
titik acuan tertentu. Jarak termasuk besaran skalar, dimana tidak bergantung pada
arah dan nilainya selalu positif.
2.3 Perpindahan
Berbeda dengan jarak, perpindahan adalah besaran vektor sehingga arah
juga berpengaruh.
2.4 Kelajuan (V)
Dalam ilmu fisika, istilah laju/kelajuan menyatakan seberapa jauh sebuah
besaran turunan yang tidak bergantung pada arah, sehingga kelajuan termasuk
skalar.
2.4.1 Kecepatan Rata-Rata
Kecepatan rata-rata suatu benda yang bergerak didefinisikan sebagai
perpindahan yang ditempuh benda dibagi waktu tempuh.
− = ℎ ℎ
= −
−
=∆∆
2.4.2 Kecepatan Sesaat
Kecepatan sesaat adalah kecepatan rata-rata selama selang waktu yang
sangat kecil. Secara matematis, kecepatan sesaat adalah perbandingan
perpindahan dengan selang waktu, jika selang waktu mendekati nol. Secara
matematis, kecepatan sesaat adalah limit perbandingan perpindahan dengan selang
waktu jika selang waktu mendekati nol.
lim ∆ →
∆ ∆
Limit ini dinamakan turunan x terhadap t, dimana dalam kondisi kalkulus
= lim
→ −
=
2.4.3 Percepatan Rata-Rata
Percepatan rata-rata didefinisikan sebagai perbandingan perubahan
kecepatan dengan selang waktu yang diperlukan untuk berubah tersebut. Secara
metematis ditulis :
− = ℎ ℎ
− = 2− 1
2− 1
ā= ∆∆
Percepatan merupakan besaran vektor, tetapi untuk gerakan satu dimensi hanya
perlu menggunakan tanda (+) dan (-) untuk menunjukkan arah sistem koordinat
yang dipakai.
2.4.4 Percepatan Sesaat
Percepatan sesaat adalah limit perbandingan perubahan kecepatan dengan
selang waktu perubahan, dengan selang waktu mendekati nol. Jika digambarkan
grafik kecepatan dengan waktu, kecepatan sesaat pada t didefinisikan sebagai
kemiringan garis yang menyinggung kurva pada saat itu.
= lim ∆ →
∆ ∆
Percepatan merupakan turunan kecepatan terhadap waktu, dan biasa ditulis
= lim∆ → ∆∆ =
Karena kecepatan merupakan turunan dari posisi terhadap t, maka percepatan
merupakan turunan kedua x terhadap t, secara matematis ditulis :
= = =
2.5 Gerak Lurus Beraturan (GLB)
Suatu benda dikatakan melakukan gerak lurus beraturan jika kecepatan
selalu konstan. Kecepatan konstan artinya besar kecepatan/kelajuan dan arah
kecepatan selalu konstan. Karena besar kecepatan/kelajuan dan arah kecepatan
selalu konstan maka bisa dikatakan bahwa benda bergerak dengan lintasan lurus
dengan kelajuan konstan.
Gambar 2.8 Grafik Kecepatan Terhadap Waktu
Berdasarkan grafik diatas, tampak bahwa besar kecepatan bernilai tetap pada
setiap satuan waktu. Besar kecepatan tetap ditandai oleh garis lurus, berawal dari
− = ℎ ℎ
= 2− 1 2− 1
⊽△△
2.6 Java
2.6.1 Sejarah Java
Sejarah Java berawal pada tahun 1991 ketika perusahaan Sun Microsystem
memulai Green Project, yakni proyek penelitian untuk membuat bahasa yang
akan digunakan pada chip-chip embedded untuk device intellegent consumer
electronic. Bahasa tersebut haruslah bersifat multiplatform, tidak tergantung
kepada vendor yang memanufaktur chip tersebut.
Dalam penelitian, Projek Green berhasil membuat prototype semacam
PDA (Personal Data Assistance) yang dapat berkomunikasi antara satu dengan
yang lain dan diberi nama Star 7. Ide berawal untuk membuat sistem operasi bagi
Star 7 berbasis C dan C++. Setelah berjalan beberapa lama, James Gosling, salah
satu seorang anggota team, merasa kurang puas dengan beberapa karakteristik dari
kedua bahasa tersebut kemudian dinamakan Oak. Diinspirasi ketika dia melihat
pohon di seberang kaca ruang kantornya. Belakangan Oak beralih nama menjadi
java.
Karena pada awalnya ditunjuk untuk pemrograman device kecil, java
memiliki karakteristik berukuran kecil, efisien, dan portable untuk berbagai
hardware. Projek Green sempat terancam terhenti karena dalam
semula. Selanjutnya java diarahkan untuk pemrograman internet. Secara
kebetulan fitur-fitur java yang telah disebutkan sebelumnya sangat sesuai bagi
pengembangan internet sehingga dalam beberapa tahun belakangan ini java telah
menjadi primadona untuk pemrograman yang berbasis internet.
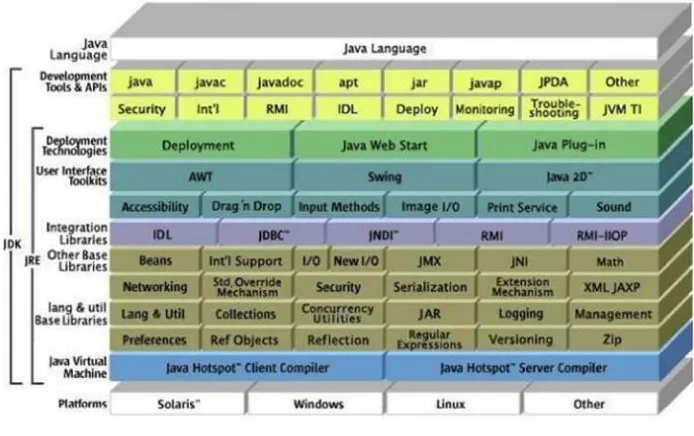
2.6.2 Definisi Java
Java menurut definisi dari Sun adalah nama untuk sekumpulan teknologi
untuk membuat dan menjalankan perangkat lunak pada komputer standalone
ataupun pada lingkungan jaringan. Java2 adalah generasi kedua dari java platform
(generasi awalnya adalah Java Devlopment Kit). Java berdiri di atas sebuah mesin
interpreter yang diberi nama Java Virtual Machine(JVM). JVM inilah yang akan
membaca bytecode dalam file .class dari suatu program sebagai representasi
program yang berisi bahasa mesin. Oleh karena itu, bahasa java di sebut sebagai
bahasa pemrograman yang portable karena dapat di jalankan pada semua system
operasi, asalkan pada system operasi tersebut terdapat JVM. Platform java terdiri
dari kumpulan library, JVM, kelas-kelas loader yang dipaket dalam sebuah
lingkungan rutin java, dan sebuah compiler, debuggerdan kakas lain yang dipaket
dalam Java Development Kit(JDK). Java2 adalah generasi yang sekarang sedang
berkembang dari platform java. Agar sebuah program java di jalankan, maka file
dengan ektensi .java harus di kompilasi menjadi file bytecode. Untuk menjalankan
bytecode tersebut dibutuhkan JRE (Java Runtime Envirotment) yang
memungkinkan pemakai untuk menjalankan program java, hanya menjalankan,
tidak untuk membuat kode baru lagi. JRE berisi JVM dan library java yang
Gambar 2.9 J2SE 5.0
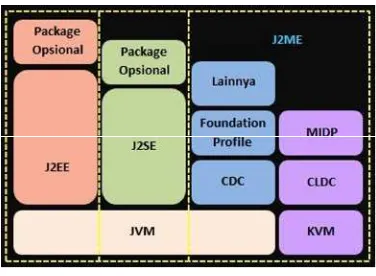
Platform java memiliki tiga buah edisi yang berbeda, yaitu J2EE (Java
Enterprise Edition), J2ME (Java2 Mikro Edition) dan J2SE (Java2 Scond
Edition). J2EE adalah kelompok dari beberapa API dari Java dan teknologi selain
Java. J2EE dibuat untuk membuat aplikasi yang kompleks. J2EE sering dianggap
sebagai middleware atau teknologi yang berjalan di server, namun sebenarnya
J2EE tidak hanya terbatas untuk itu. Faktanya J2EE juga mencakup teknologi
yang dapat digunakan di semua lapisan dari sebuah sistem informasi.
Implementasi J2EE menyediakan kelas dasar dan API dari Java yang mendukung
pengembangan dan rutin standar untuk aplikasi klien maupun server, termasuk
aplikasi yang berjalan di web browser. J2SE adalah lingkungan dasar dari Java.
Ruang lingkup keterhubungan J2EE, J2SE dan J2ME dapat di ihat pada gambar
Gambar 2.10 Ruang Lingkup Keterhubungan J2EE, J2SE dan J2ME
2.6.3 Java2 Enterprise Edition (J2EE)
J2ee (Java 2 Enterprise Edition) adalah sebuah solusi java untuk sebuah
software yang ditunjukan untuk sebuah perusahaan dengan skala cukup besar.
Hal-hal yang dibutuhkan dalam skala interprise sangat berbeda dengan hal-hal
yang dibutuhkan oleh software biasa. J2ee mengandung lebih banyak API
(Application Programming Interface) serta dipergunakan dalam arsitektur yang
lebih besar daripada J2SE. Dari segi arsitektur n-tier, dimana software tersebut
[image:33.612.234.422.78.216.2]dibagi menjadi beberapa tingkatan/tier yang terpisah tergantung kegunaanya.
Dari gambar diatas terlihat bahwa J2EE mencakup 3 bagian utama yaitu :
client, java ee server, dan database.
User Interface
Bagian ini adalah bagian yang berinteraksi langsung dengan user. Java
menyediakan 2 solusi untuk bagian ini, yang pertama dengan menggunakan
aplikasi java yang ditaruh di client dan bisa terhubung ke server atau
menggunakan halaman web HMTL dinamik.
Java EE Server
Pada bagian ini dibagi lagi menjadi 2 bagian, yaitu web tier dan business
tier. Pada web tier terdapat aplikasi java JSP (Java Server Pages). Web tier
ini lebih ke arah web dinamik (dapat menggantikan web HMTL dinamik
dikomputer client). Terdapat juga business tier, yaitu sebuah abstraksi dari
kegiatan-kegiatan yang ada dalam proses bisnis diperusahaan. Di bagian ini
terdapat program java seperti beans, dan servlet, dan masing-masing dari
program tersebut adalah sebuah fungsi dari proses bisnis. Ha ini sesuai
dengan fungsi j2ee seagai sebuah IT sistem yang mensupport bisnis
perusahaan.
Database Server
Dibagian ini adalah tempat data-data perusahaan disimpan. Bisa berupa
database seperti oracle atau merupakan EIS (Enterprise Information System)
internal perusahaan. Java disini lebih ke arah menyediakan konektivitas dari
2.6.4 Java2 Standard Edition
J2SE adalah inti dari bahasa pemrograman Java. JDK (Java Devlopment
Kit) adalah salah satu tool dari J2SE untuk mengkompilasi dan menjalankan
program Java. Di dalamnya terdapat tooluntuk mengkompilasi program Java dan
JRE. Tool J2SE yang salah satunya adalah jdk1.5 merupakan tool open source
dari Sun.
Java 2 Standard Edition (J2SE), digunakan untuk mengembangkan
aplikasi-aplikasi desktopdan Applet(aplikasi java yang dapat dijalankan di dalan
browser Web). Pada pemrograman Java terdapat kelebihan lain yang tidak
dimiliki bahasa pemrograman lainnya yaitu Applet. Java Applet adalah sebuah
program kecil yang dibuat dengan menggunakan bahasa perograman Java, yang
diakses melalui halaman Web dan dapat di-downloadke dalam mesin Client yang
kemudian menjalankannya didalam jendela web-browser. Java applet dapat secara
dinamis menambahkan beberapa fungsi kepada halaman-halaman web yang
bersifat statis. Akan tetapi, untuk menjalankannya, sebuah komputer harus
memiliki program penjelajah web yang dapat menjalankan Java, seperti Microsoft
Internet Explore, Netscape Navigator, Mozilla Firefox,dan Opera.
Ketika sebuah Java Applet dibuat, semua pernyataan Java yang
terkandung di dalam kode sumbernya akan di kompilasi menjadi bytecode, yakni
sebuah bahasa mesin semu (virtual engine/machine laguage) yang dibentuk oleh
Java. Berkas yang berisi Java bytecode ini akan disimpan sebagai sebuah berkas
kelas Java (Java class file) didalam sebuah Web server, seperti halnya Apache
HTTP Server atau Microsoft Internet Information Service (IIS). Sebuah halaman
<APPLET>...</APPLET> di dalam kode sumbernya. Ketika sebuah penjelajah
Web milik klien melakukan request kepada halaman Web tersebut menemukan
bahwa di dalamnya terdapat tag <APPLET>...</APPLET>, bytecode di dalam
java class file akan dieksekusi oleh mesin semu di dalam jendela penjelajah Web,
yang dapat berupa Microsoft Java Virtual Machineatau Java Runtime Engine.
2.6.5 Java2 Micro Edition(J2ME)
Java2 Micro Edition atau yang sering disebut J2ME adalah lingkungan
pengembangan yang telah didisain untuk meletakkan perangkat lunak Java pada
barang elektronik beserta perangkat pendukungnya. Pada J2ME, jika perangkat
lunak berfungsi baik pada sebuah perangkat maka belum tentu juga berfungsi baik
pada perangkat yang lainnya. J2ME membawa Java ke dunia informasi,
komunikasi, dan perangkat komputasi selain perangkat komputer desktop. J2ME
biasa digunakan pada telepone seluler, pager, personal digital assistants(PDA’s)
dan sejenisnya.
J2ME adalah bagian dari J2SE, karena itu tidak semua library yang ada
pada J2SE dapat digunakan pada J2ME. Tetapi J2ME mempunyai beberapa
library khusus yang tidak dimiliki J2SE. Arsitektur J2ME dapat dilihat pada
Gambar 2.12 Arsitektur J2ME
Teknologi J2ME juga memiliki keterbatasan, terutama jika diaplikasikan
pada ponsel. J2ME sangat tergantung pada perangkat (device) yang digunakan,
bisa dari segi merk ponsel, maupun kemampuan ponsel, dan dukungannya
terhadap teknologi J2ME. Misalnya, jika sebuah ponsel tidak memiliki kamera
maka jelas J2ME pada ponsel tersebut tidak dapat mengakses kamera.
Keterbatasan lainnya adalah pada ukuran aplikasi, karena memori pada ponsel
sangat terbatas. Sebagian besar ponsel tidak mengijinkan aplikasi J2ME menulis
pada filekarena alasan keamanan.
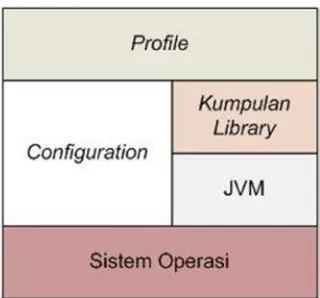
Configuration merupakan Java library minimum dan kapabilitas yang di
punya oleh para pengembang J2ME, yang maksudnya sebuah mobile device
dengan kemampuan Java akan dioptimalkan untuk menjadi sesuai. Configuration
hanyalah mengatur hal-hal tentang kesamaan sehingga dapat dijadikan ukuran
kesesuaian antar-device. Misalnya sebuah lampu sepeda dirancang sedemikan
rupa sehingga didefinisikan dua buah konfigurasi yaitu CLDC (Connected
Device Configuration) untuk perangkat yang lebih besar. Lingkup CLDC dan
[image:38.612.237.425.145.226.2]CDC dapat dilihat pada gambar 2.6 dibawah ini.
Gambar 2.13 Lingkup Configuration
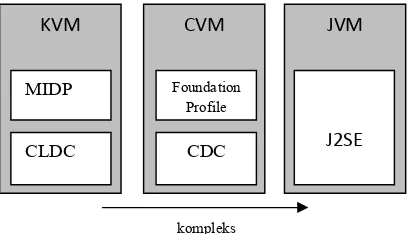
Profile berbeda dengan configuration, profile membahas sesuatu yang
spesifik untuk sebuah perangkat. Dalam J2ME terdapat dua buah profile yaitu
MIDP dan Foundation Profile. Keterhubungan pada J2ME beserta mesin
virtualnya dapat di lihat pada gambar 2.7 dibawah ini.
Gambar 2.14 Hubungan J2ME dan J2SE
J2SE CDC CLDC
KVM CVM JVM
MIDP
CLDC
Foundation Profile
CDC J2SE
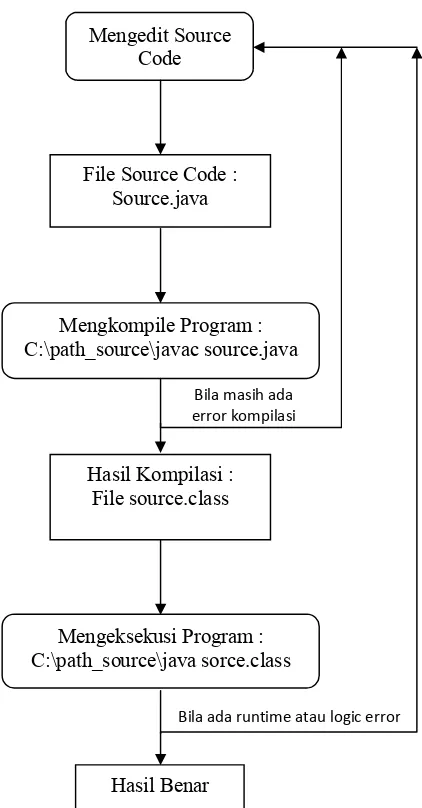
[image:38.612.215.419.390.507.2]Bila ada runtime atau logic error Bila masih ada
[image:39.612.228.439.78.482.2]error kompilasi
Gambar 2.15 Diagram Alur Java Mengedit Source
Code
File Source Code : Source.java
Mengkompile Program : C:\path_source\javac source.java
Hasil Kompilasi : File source.class
Mengeksekusi Program : C:\path_source\java sorce.class
2.6.6 Struktur Pemrograman Java
Package
Package atau paket adalah cara pengelompokan dan pengorganisasian
class-class dalam satu library. Package bekerja dengan membuat
directonari dan folder varu sesuai dengan penamaan package, kemudian
menyimpan file class pada folder tersebut. Deklarasi package ditulis pada
baris paling atas sebelum perintah import, sebagaimana terlihat pada
struktur program java diatas. Deklarasi package adalah sbb:
Package speedometer; // nama paketnya speedometer
Package adalah perintah java yang digunakan untuk memberitahukan
bahwa suatu class adalah anggota dari package, sedangkan namaPackage
dapat berupa susunan direktori tempat dimana file class disimpan atau package speedometer;
import gnu.io.*; /**
*Komentar dalam java */
Modifier class namaKelas{ //deklarasi variable
Modifier methodConstructor(){ //statement
}
nama folder. Penulisan nama package dalam java biasanya diawali dengan
huruf kecil.
Import
Perintah import digunakan untuk memberitahukan kepada program untuk
mengacu pada class-class yang terdapat pada package tersebut dan buka
menjalankan class-class. Deklarasi :
Import namaKelas.namaKelas
Import gnu.io.*;// import kelas io
Tanda arsitek (*) digunakan untuk mengimport semua class. Sedangkan
untuk mengimpor class nama class dituliskan setelah nama package.
Komentar Dalam java
Komentar adalah catatan yang ditulis bersama kode program yang berguna
sebagai catatan/keterangan dari satu kode, sehingga dapat digunakan
sebagai referensi dalam pembuatan dokumentasi. Komentar merupakan
bagian dari program yang tidak mempengaruhi jalanya program saat
program dikompilasi atau dieksekusi.
Dalam penuliasan komentar, java mengizinkan penulisan komentar versi
java sendiri yang dapat digunakan sebagai pembuatan dokumentasi html.
Selain itu java juga mengadopsi penuliasn versi C dan C++ akan tetapi
dapat dibuat dokumentasi html.
Penulisan komentar versi java diawali dengan /**. Didalam tanda tersebut
Identifier JAVA
Identifier adalah suatu tanda yang berupa huruf, latar, atau gabungan yang
digunakan sebagai nama variable, methode, class, dan sebagainya.
Dekalarasi class
Dalam deklarasi class, pertimbangan dimana dan bagaimana class tersebut
digunakan (menentukan modifier). Kemudian berilah nama (identifier)
yang sesuai dengan informasi yang dikandung dan dituliskan deklarasi
propertysecara lengkap beserta method secara urut. Pilihlah modifieryang
sesuai untuk menentukan hubungan dengan classlain.
(modifier_1) namaClass(modufier_2) {
<deklarasi variabel> <deklarasi konstruktor>
<deklarasi methode> }
/**
*ini adalah contoh komentar dalam versi java *menguasai pemrograman java
Modifier
Modifier adalah keyword java yang berfungsi mengatur hubungan antar
class, methode, dan variable. Hubungan yang dimaksud yakni apakah
suatu variable, method dan class dalam satu class dapat diakses oleh class
dan methode lainnya.
Blok Statement Java
Blok statement adalah himpunan pernyataan yang terdapat diantara
kuraung kurawal buka dan kurawal tutup({....}). Blok sendiri terdapat 3
macam, yaitu :
1. Blok class
Blok class dimulai dari tanda “{“ setelah indentifier dan di akhiri
dengan tanda “}”. Disini terlihat blok class sebagi hierarkhi
tertinggi yang didalamnya terdapat data, blok methode.
2. Blok methode
Blok methode terdapat dalam blok class dan tidak dapat berdiri
sendiri. Blok methode terdiri atas data dan struktur control.
3. Blok kontrol
Blok kontrol merupakan representasi struktur control.
Deklarasi methode
Methode adalah bagian pemrograman yang menjelaskan tingkah laku dari
objek yang akan diinstan. Methode tidak dapat berdiri sendiri sebagaimana
class, dimana letak penulisan berada dalam badan class. Deklarasi
(modifier) tipeKembalian namaMethode (parameter input) Throw Exception {
// Statement }
2.6.7 Keunggulan Java
Java memiliki beberapa keunggulan bila dibandingkan dengan bahasa
pemrograman lainnya. Antara lain :
1. Java bersifat sederhana dan relatif mudah
Java dimodelkan sebagian dari bahasa C++, namun dengan
memperbaiki beberapa karakteristik C++, seperti mengurangi
kompleksitas beberapa fitur, penambahan fungsionalitas, serta
penghilangan beberapa aspek pemicu ketidakstabilan sistem pada
C++.
Sebagai contoh, Java menggantikan konsep pewarisan lebih dari satu
(multiple inheritance) dengan interface, menghilangkan konsep
pointer yang sering membingungkan, otomatisasi sistem alokasi
memory, dan sebagainya. Ini membuat Java relatif sederhana dan
mudah untuk dipelajari dibandingkan bahasa pemrograman lainnya.
2. Java berorientasi pada objek (Object Oriented)
Java adalah bahasa pemrograman yang berorientasi objek (OOP),
bukan seperti Pascal, Basic atau C yang berbasis prosedural. Dalam
kemudian memodelkan sifat dan tingkah laku masing-masing.
Selanjutnya, Java menentukan dan mengatur interaksi antara objek
yang satu dengan lainnya.
3. Java bersifat terdistribusi
Pada dekade awal perkembangan PC (Personal Computer), komputer
hanya bersifat workstation tunggal, tdiak terhubung satu sama lain.
Saat ini, sistem komputerisasi cenderung terdistribusi, mulai dari
workstation client, e-mail server, database server, web server, proxy
server,dan sebagainya.
4. Java bersifat Multiplatform
Java bersifat multiplatform, yakni dapat di-“terjemahkan” oleh Java
Interpreter sebagi sistem operasi.
5. Java bersifat MultiThread
Thread adalah proses yang dapat dikerjakan oleh program dalam satu
waktu. Java bersifat Multithreaded, artinya dapat mengerjakan
2.7 Sensor Cahaya
2.7.1 LDR (Light Dependent Resistor)
LDR adalah suatu bentuk komponen yang mempunyai perubahan
resistansi yang besarnya tergantung pada cahaya. Resistor peka cahaya (Light
Dependent Resistor) memanfaatkan bahan semikonduktor yang karakteristik
listriknya berubah-ubah sesuai dengan cahaya yang diterima. Bahan yang
digunakan adalah Kadmium Sulfida (CdS) dan Kadmuim Selenida (CdSe).
Bahan-bahan ini sangat sensitif terhadap cahaya dalam spektrum tampak, dengan
puncaknya sekitar 0,6 µm untuk CdS dan 0,75 µm untuk CdSe. Sebuah LDR CdS
yang tipikal memiliki resistansi sekitar 1MΩ dalam kondisi gelap gulita dan
kurang dari 1KΩ ketika ditempkan di bawah sumber cahaya terang.
Gambar 2.16 Lambang LDR
Karakteristik LDR terdiri dari dua macam yaitu Laju Recovery dan Respon
Spektral :
Laju Recovery
Bila sebuah LDR dibawa dari sebuah ruangan dengan level kekuatan
cahaya tertentu ke dalam suatu ruangan yang gelap maka nilai resistansi
dari LDR tidak akan segera berubah resistansinya pada geadaan ruangan
gelap tersebut. Namun LDR tersebut hanya akan bisa mencapai harga di
merupakan suatu ukuran praktis dan suatu kenaikan nilai resistansi dalam
waktu tertentu. Harga ini ditulis dalam K/detik, untuk LDR tipe arus
harganya lebih besar dari 200 K/detik (selama 20 menit pertama mulaidari
level cahaya 100 lux), kecepatan tersebut akan lebih tinggi dari arah
sebaliknya, yaitu pindah dari tempat gelap ke tempat terang yang
memerlukan waktu kurang dari 10 ms untuk mencapai resistansi yang
sesuai dengan level cahaya 400 lux.
Respon Spektral
LDR tidak memiliki sensitivitas yang sama untuk setiap panjang
gelombang cahaya yang jatuh padanya (yaitu warna). Bahan yang biasa
digunakan sebagai penghantar arus listrik yaitu tembaga, alumunium, baja,
emas, perak. Dari kelima bahan tersebut tembaga merupakan yang paling
banyak digunakan karena mempunyai daya hantar yang baik.
2.7.2 Photodioda
Photodioda adalah jenis dioda yang berfungsi untuk mendeteksi cahaya.
Berbeda dengan dioda biasa, komponen elektronik ini akan mengubah cahaya
menjadi arus listrik. Cahaya yang dapat di deteksi oleh dioda ini, mulai dari infra
red, sinar ultra violet, sampai dengan sinar X.
Photodioda dibuat dari semikonduktor dengan bahan yang populer adalah
silicon (Si) arau galium arsenida (GaAs), dan yang lain meliputi InSb, InAs, PbSe.
Material ini menyerap cahay dengan karakteristik panjang gelombang mencakup :
photon (satu satuan energi dalam cahaya) dari sumber cahaya diserap, hal tersebut
membangkitkan suatu elektron dan menghasilkan sepasang pembawa muatan
tunggal sebuah elektron dan sebuah hole, dimana suatu hole adalah bagian dari
ksisi-kisi semikonduktor yang kehilangan elektron. Arah arus yang melalui
sebuah semikonduktor adalah kebalikan dari gerakan muatan pembawa. Cara
tersebut didalam sebuah photodiode digunakan untuk mengumpulkan photon -
menyebabkan pembawa muatan (seperti arus atau tegangan) mengalir/terbentuk di
[image:48.612.275.362.295.406.2]bagian-bagian elektroda.
Gambar 2.17 Photodioda
2.7.3 PhotoTrasnsistor
Phototransistor adalah sebuah transistor yang apabila dikenai cahaya akan
mengalirkan elektron sehingga akan terjadi penguatan arus seperti pada
transistor.
2.7.4 Optocoupler
Optocoupler merupakan salah satu jenis komponen yang memanfaatkan
sinar sebagai pemicu on/off-nya. Opto berarti optic dan coupler berarti pemicu.
Sehingga bisa diartikan bahwa optocoupler merupakan suatu komponen yang
bekerja berdasarkan picu cahaya optik opto-coupler termasuk dalam sensor,
dimana terdiri dari dua bagian yaitu transmiterdan receiver.
Gambar 2.19 Optocoupler
Bagian pemancar atau transmiter dibangun dari sebuah led infra merah
untuk mendapatkan ketahanan yang lebih baik daripada menggunakan ledbiasa.
Sensor ini bisa juga digunakan sebagai isolator dari rangkaian tegangan rendah ke
rangkaian tegangan tinggi. Selain itu juga bisa digunakan sebagai pendeteksi
adanya penghalang adanya transmiter dan receiver dengan memberi ruang uji
dibagian tengah antara led dan photo transistor. Penggunaan ini bisa diterapkan
untuk mendeteksi putaran motor atau mendeteksi lubang penanda disket pada disk
2.8 Bluetooth
2.8.1 Pengertian Bluetooth
Bluetooth adalah spesifikasi industri untuk kawasan pribadi (Personal
Area Network atau PAN) tanpa kabel. Bluetooth menghubungkan dan dapat
dipakai untuk tukar menukar informasi diantara peralatan-peralatan. Spesifikasi
dari peralatan bluetooth dikembangkan dan didistribusikan oleh kelompok
Bluetooth Special Interest Group. Bluetooth beroperasi dalam pita frekuensi 2,4
Ghz dengan menggunakan sebuah frequency hopping traceiver yang mampu
menyediakan layanan komunikasi data dan suara secara real timeantara host-host
bluetooth dengan jarak terbatas. Kelemahan teknologi ini adalah jangkauanya
yang pendek dan kemampuan transfer data yang rendah.
2.8.2 Sejarah Bluetooth
Awal mula dari bluetooth adalah sebagai teknologi komunikasi wireless
(tanpa kabel) yang beroperasi dalam pita frekuensi 2,4 Ghz unlicensed ISM
(Industrial Scientific and Medical) dengan menggunakan sebuah frequency
hopping traceiver yang mampu menyediakan layanan komunikasi data dan suara
secara real time antara host-host bluetooth dengan jarak jangkau layanan yang
terbatas (sekitar 10 meter). Bluetooth berupa cardyang menggunakan frekusensi
radio standar IEEE 802.11 dengan jarak layanan terbatas dan kemampuan data
transfer lebih rendah dari card untuk Wireless Local Area Network(WLAN).
Pembentukan bluetooth dipromotori oleh 5 perusahaan besar Ericsson,
yang meluncurkan proyek ini. Pada bulan Juli 1999 dokumen spesifikasi
bleutooth versi 1.0 mulai diluncurkan. Pada bulan Desember 1999 dimulai lagi
pembuatan dokumen spesifikasi bluetooth versi 2.0 dengan tambahan 4 promotor
baru yaitu 3Com, Lucent Technologies, Microsoft dan Motorolla. Saat ini lebih
dari 1800 perusahaan diberbagai bidang bergabung dalam sebuah konsorsium
sebagi adopter teknologi bluetooth. Walaupun standar bluetooth SIG saat ini
dimiliki oleh group promotor tetapi ia diharapkan akan menjadi standar IEEE
(802.15)
2.8.3 Asal Nama Bluetooth dan Lambangnya
Nama bluetooth berasal dari nama raja di akhir abad sepuluh, Harald
Blatand yang di Inggris juga dijuluki Harald Bluetooth kemungkinan karena
memang giginya berwarna gelap. Ia adalah raja Denmark yang telah berhasil
menyatukan suku-suku yang sebelumnya berperang, termasuk suku dari wilayah
yang sekarang bernama Norwegia dan Swedia. Bahkan wilayah Scania di Swedia,
tempat teknologi bluetooth ini ditemukan juga termasuk daerah kekuasaannya.
Kemampuan raja itu sebagai pemersatu juga mirip dengan teknologi bluetooth
sekarang yang bisa menghubungkan berbagai peralatan seperti komputer peronal
dan telepon genggam. Sedangkan logo bluetooth berasal dari penyatuan huruf
Jerman yang analoh dengan huruf H dan B (singkatan dari Harald Bluetooth),
Gambar 2.20 Logo Bluetooth
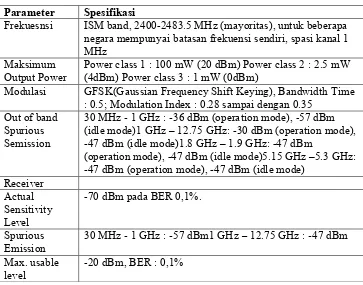
Tabel 2.2 Karakteristik Radio Bluetooth
Parameter Spesifikasi
Frekuesnsi ISM band, 2400-2483.5 MHz (mayoritas), untuk beberapa negara mempunyai batasan frekuensi sendiri, spasi kanal 1 MHz
Maksimum Output Power
Power class 1 : 100 mW (20 dBm) Power class 2 : 2.5 mW (4dBm) Power class 3 : 1 mW (0dBm)
Modulasi GFSK(Gaussian Frequency Shift Keying), Bandwidth Time : 0.5; Modulation Index : 0.28 sampai dengan 0.35
Out of band Spurious Semission
30 MHz - 1 GHz : -36 dBm (operation mode), -57 dBm (idle mode)1 GHz – 12.75 GHz: -30 dBm (operation mode), -47 dBm (idle mode)1.8 GHz – 1.9 GHz: -47 dBm
(operation mode), -47 dBm (idle mode)5.15 GHz –5.3 GHz: -47 dBm (operation mode), -47 dBm (idle mode)
Receiver Actual Sensitivity Level
-70 dBm pada BER 0,1%.
Spurious Emission
30 MHz - 1 GHz : -57 dBm1 GHz – 12.75 GHz : -47 dBm
Max. usable level
-20 dBm, BER : 0,1%
2.8.4 Cara Kerja Bluetooth
Sistem bluetooth terdiri dari sebuahradio transceiver, baseband link
Management dan Control, Baseband (processor core, SRAM, UART, PCM
USB Interface), flashdanvoice codec. Baseband link controller menghubungkan
manager melakukan aktivitas-aktivitas protokol tingkat tinggi seperti melakukan
link setup, autentikasi dan konfigurasi. Secara umum blok fungsional pada sistem
[image:53.612.170.403.155.317.2]bluetooth secara umum dapat dilihat pada Gambar 2.19 dibawah ini.
Gambar 2.21 Blok Fungsi Sistem Bluetooth
Protokol bluetooth menggunakan sebuah kombinasi antara circuit
switching dan packet switching. Sebuah perangkat yang memiliki teknologi
wireless akan mempunyai kemampuan untuk melakukan pertukaran informasi
dengan jarak jangkauan sampai dengan 10 meter (~30 feet), bahkan untuk daya
kelas 1 bisa sampai pada jarak 100 meter.
Bluetooth merupakan chip radio yang dimasukkan ke dalam komputer,
printer, handphone dan peralatan lainnya. Chip bluetooth ini dirancang untuk
menggantikan kabel. Informasi yang biasanya dibawa oleh kabel dengan
Bluetooth ditransmisikan pada frekuensi tertentu kemudian diterima oleh chip
Bluetooth kemudian informasi tersebut diterima oleh komputer, handphone dan
Gambar 2.22 Proses Distribusi Aliran Data Dari Host sampai Antena pada Teknologi Bluetooth
Tiga buah lapisan fisik yang sangat penting dalam protokol arsitektur Bluetooth
ini adalah :
1. Bluetooth radio, adalah lapisan terendah dari spesifikasi Bluetooth.
Lapisan ini mendefinisikan persyaratan yang harus dipenuhi oleh
perangkat tranceiver yang beroperasi pada frekuensi 2,4 GHz ISM.
2. Baseband, lapisan yang memungkinkan hubungan Radio Frequency(RF)
terjadi antara beberapa unit Bluetooth membentuk piconet. Sistem RF dari
bluetooth ini menggunakan frekuensi-hopping-spread spectrum yang
mengirimkan data dalam bentuk paket pada time slot dan frekuensi yang
telah ditentukan, lapisan ini melakukan prosedur pemeriksaan dan paging
untuk sinkronisasi transmisi frekuensi hopping dan clock dari perangkat
bluetooth yang berbeda.
3. LMP (Link Manager Protocol), bertanggung jawab terhadap link set-up
antar perangkat Bluetooth. Hal ini termasuk aspek security seperti
autentifikasi dan enkripsi dengan pembangkitan, penukaran dan
2.8.5 Kelebihan dan Kekurangan
Kelebihan
1. Bluetooth dapat menembus dinding, kotak, dan berbagai rintangan
lain walaupun jarak transmisinya hanya sekitar 30 kaki atau 10 meter
2. Bluetooth tidak memerlukan kabel ataupun kawat
3. Bluetooth dapat mensinkronisasi basis data dari telepon genggam ke
komputer
4. Dapat digunakan sebagai perantara modem
Kekurangan
1. Sistem ini menggunakan frekuensi yang sama dengan gelombang
LAN standar
2. Apabila dalam suatu ruangan terlalu banyak koneksi bleutooth yang
digunakan, akan menyulitkan pengguna untuk menemukan penerima
yang diharapkan
3. Banyak mekanisme keamanan bleutooth yang harus diperhatikan
untuk mencegah kegagalan pengiriman atau penerimaan informasi
4. Di Indonesia, sudah banyak beredar virus-virus yang disebarkan
Proses Output Input 2 m L1 L2 Sumber Tegangan BAB III
PERENCANAAN DAN PEMBUATAN ALAT
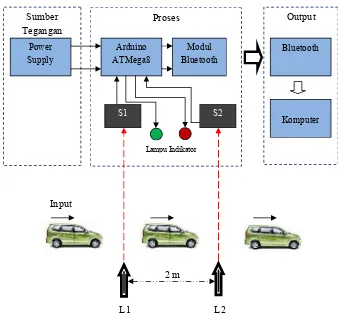
1.1 Skema Alat Pengukur Laju Kendaraan
[image:56.612.146.484.172.487.2]
Gambar 3.1 Skema Alat Pengukur Laju Kendaraan
Keterangan :
L1 = Laser Pointer 1 dengan nyala lampu merah
o L2 = Laser Pointer 1 dengan nyala lampu merah
o S1 = Sensor 1 (Light Dependent Resistors)
o S2 = Sensor 2 (LDR)
o = Lampu indikator sensor 1
o = Lampu indikator sensor 2
Proses pengiriman data hasil pengukuran dari mikrokontroler ke komputer adalah bit per bit.
Inisialisasi bluetooth dilakukan pada komputer, lalu dilakukan proses sinkronisasi yang kemudian komputer membaca bluetooth sebagai “Com”.
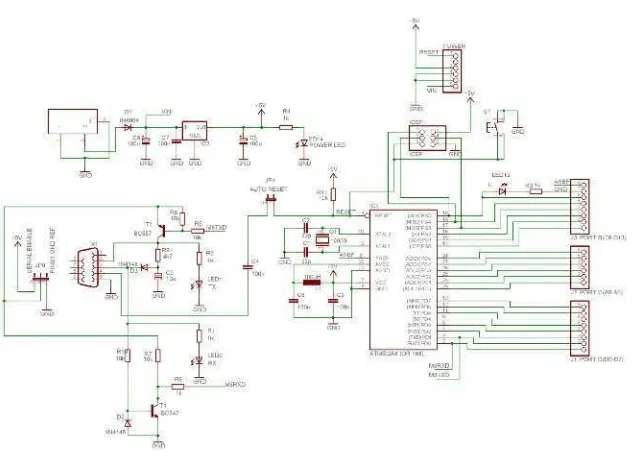
[image:57.612.173.490.233.463.2]1.2 Skematik Arduino ATMega8
Gambar 3.3 Skematik Rangkaian Alat
Alat pengukur laju kendaraan ini terdiri dari:
o Power Supply (5v dan 9v)
o Mikrokontroler (Arduino ATMega8)
o Modul Bluetooth (MB-C04)
o 2 Buah Sensor Cahaya (LDR)
o Lampu Indikator Sensor (Hijau dan Merah)
1.3 TampilanInterfacepada Java
Gambar 3.4 Interface pada Java
Gambar diatas merupakan tampilan pada program java, yang dibuat untuk
menampilkan hasil pengukuran. Koneksi yang digunakan adalah dengan
Gambar 3.5 Penjelasan bagian-bagian interface
1. Terdiri dari beberapa tombol pilihan dengan beberapa fungsi yang
berbeda-beda diantarannya:
Port merupakan tombol pilihan untuk menentukan Serial Port yang digunakan, serial port yang digunakan adalah berbentuk
“COM”. Ketika program dijalankan, maka program akan
menginisialisai Serial Port yang terdapat pada komputer.
1 2
3 4
5 6
7
8
9
10
Baud Rate merupakan tombol pilihan kecepatan transfer yang memiliki nilai mulai dari 2400, 4800, 9600, dan 19200.
Data Bits merupakan tombol pilihan untuk pengiriman data secara UART dimulai dari 5, 6, 7, 8.
Parity (keseimbangan) merupakan tombol pilihan yang berfungsi sebagai pengecek error pada data yang ditransfer. Pada tombol
pilihan ini terdapat nilai ODD (ganjil), EVEN (genap), dan NONE.
Stop Bits Selalu bernilai 1 : merupakan tombol pilihan yang berfungsi sebagai akhir dari komunikasi data. Pada tombol pilihan
terdapat 1, 1.5, dan 2.
Flow Controlselalu bernilai NONE. 2. Merupakan Judul dari data yang diterima oleh java
3. Batas waktu start (mulai menghitung) saat sensor 1 terhalang oleh
kendaraan.
4. Batas waktu finish (menghentikan waktu) saat sensor 2 terhalang oleh
kendaraan.
5. Data yang diterima oleh java, merupakan tampilan waktu kendaraan
melintasi kedua buah sensor (dalam satuan detik).
6. Data yang diterima oleh java, merupakan tampilankecepatan kendaraan.
7. Tombol Connect berfungsi untuk menghubungkan antar alat dengan
program tampilan java secara serial.
8. Tombol Disconnect berfungsi untuk memutuskan hubungan antara alat
9. Tombol Clear Respon berfungsi untuk menghapus respon dari data yang
diterima (menghapus data yang ditunjukkan pada point 3).
10.Tombol Close berfungsi untuk menutup aplikasi atau keluar dari aplikasi.
11.Merupakan status parameter telah terhubung atau belum terhubung, jika
sudah terhubung (tombol Connect ditekan) maka statusnya adalah
“Connect”, begitupun sebaliknya jika statusnya belum terhubung maka
parameter yang terbaca adalah “Disconnect”.
12.Merupakan status serial yang dipilih atau digunakan, jika status terhubung
(tombol Connect ditekan), maka status yang muncul sama seperti Serial
Port (Com) yang dipilih. Namun jika keadaan tidak terhubung
(Disconnect) maka status yang muncul adalah “ auto”.
13.Merupakan status parameter untuk pemilihan baud rate, data bits, parity,
stop bits dan control flow. Jika dalam keadaan tidak terhubung
(Disconnect)maka statusnya adalah “auto”.
1.4 Power Supply
Power supply menghasilkan tegangan 5v dan 9v yang dibutuhkan oleh
mikrokontroler 9v, sensor masing-masing 5v serta modul bluetooth 5v. Berikut
Gambar 3.6 Rangkaian Power Supply
1.4.1 Fungsi masing-masing komponen Power Supply
Dioda digunakan sebagai penyearah arus
Capacitor sebagai filter (penyaring), penyimpan tegangan
IC7805 merupakan IC regulator untuk tegangan keluaran sebesar +5v DC
IC7809 merupakan IC regulator untuk tegangan keluaran sebesar +9v DC
Led 1 (D3) sebagai lampu indikator tegangan +5v DC
Led 2 (D7) sebagai lampu indikator tegangan +9v DC
1.5 Rangkaian Sensor
Dalam pembuatan alat ini, sensor yang digunakan adalah LDR (Light
Dipendent Resistor) yang berfungsi sebagai penerima cahaya yang di tembakan
kedua buah laser. Ketika sensor ini menerima cahaya, maka keadaan yang dibaca
terhalang oleh kendaraan yang melintas, maka keaadaan yang dibaca oleh
mikrokontroler adalah HIGH. Berikut adalah gambar rangkaian kedua buah
sensor :
Gambar 3.7 Rangkaian Pull-Uppada Sensor
1.6 Modul Bluetooth
3.6.1 Modul Bluetooth MB-C04
Modul bluetooth ini berfungsi untuk mengirimkan data hasil pengukuran
dari mikrokontroler ke komputer, berikut adalah gambar dari modul bluetooth
Gambar 3.8 Modul Bluetooth MB-C04
Gambar 3.9 Skema Modul Bluetooth MB-C04
Beroperasi sebagai Slave
Key “0000”
Komputer mendeteksi modul sebagai “COM”.
3.6.2 Proses Koneksi Modul bluetooth dengan Bluetooth pada Komputer
Komunikasi dua buah bluetooth akan berjalan apabila keduanya telah
terkoneksi satu sama lain (sinkron), berikut merupakan cara melakukan koneksi
antar dua buah bluetooth :
RX TX
+5v
MCU
RX TX Port D1/Pin 2
[image:65.612.189.467.286.438.2]1. Lakukan pencarian pada modul bluetooth MB-C04 seperti pada gambar
[image:66.612.212.460.131.324.2]dibawah ini
Gambar 3.10 Langkah 1 Pencarian Modul Bluetooth
Kemudian klik tombol next untuk mencari modul bluetooth yang tersedia
pada alat, yakni modul MB-C04, jika pencarian berhasil maka pada
Gambar 3.11 Langkah 2 Pencarian Modul Bluetooth
Pada gambar diatas, modul bluetooth MB-C04 terdeteksi dengan nama
Spp, kemudian pilih Spp dan klik next, hingga muncul perintah seperti
[image:67.612.215.457.235.425.2]gambar dibawah ini :
Gambar 3.12 Langkah 3 Pencarian Modul Bluetooth
Setelah muncul perintah seperti gambar diatas, langah selanjutnya adalah
memberikan tanda centang pada Spp kemudian klik tombol next, hingga
Gambar 3.13 Langkah 4 Pencarian Modul Bluetooth
Gambar 3.14 Langkah 5 Pencarian Modul Bluetooth
Setelah proses pencarian selesai, maka pada windows explore akan terlihat
1.7 Laser Pointer
Laser pointer berfungsi sebagai penghasil cahaya yang akan diterima
kedua buah sensor (LDR), dengan menggunakan laser pointer cahaya yang
[image:69.612.238.399.178.347.2]dihasilkannya akan tegak lurus mengenai sensor tersebut.
Gambar 3.15 Laser Pointer
1.8 Lampu Indikator
Lampu indikator ini berfungsi sebagai sinyal ketika sensor telah terhalang
oleh kendaraan. Jika sensor 1 terhalang oleh kendaraan, maka lampu hijau akan
menyala. Selanjutnya jika sensor kedua terhalang oleh kendaraan maka lampu
merah akan menyala dan lampu hijau akan padam.
[image:69.612.230.443.537.677.2]Ya Tidak
Ya Tidak
[image:70.612.158.460.74.652.2]1.9 Flowchart
Gambar 3.17 Diagram Alur Sistem Pada Alat START
Baca SENSOR 1
Apakah SENSOR 1 terhalang?
Start Timer (milidetik)
Baca SENSOR 2
Apakah SENSOR 2 terhalang? STOP Timer Nyalakan Lampu INDIKATOR 1 Hitung Waktu (detik)
Kecepatan = Jarak Sensor / Waktu
Kirim Data Kecepatan, Data Waktu Tempuh Melalui
UART/Bluetooth
Nyalakan Lampu INDIKATOR 2
Matikan Lampu INDIKATOR 1 Deklarasi Variabel Konfigurasi
I/O Inisialisasi UART
Matikan Lampu INDIKATOR 2
Kirim Data Waktu SENSOR 1
Tidak
Ya
[image:71.612.159.446.83.342.2]Ya
Gambar 3.18 Diagram Alur Sistem Tampilan Java START
Inisialisasi PORT
Apakah Tombol Connect ditekan?
Pilih PORT
Menghubungkan COM
Apakah Tombol Disonnect ditekan
E