Informasi Dokumen
- Penulis:
- Muchamad Rifqi
- Sekolah: Universitas Lampung
- Mata Pelajaran: Teknik Elektro
- Topik: RANCANG BANGUN PROTOTIPE LIFT DENGAN KENDALI BERBASIS MIKROKONTROLER ARDUINO
- Tipe: Skripsi
- Tahun: 2016
- Kota: Bandar Lampung
Ringkasan Dokumen
I. Introduction
This section establishes the context for the research by discussing the increasing prevalence of voice-controlled technology and its potential applications in various fields, including elevator systems. It highlights the convenience and efficiency offered by voice control, particularly in the context of parking elevators in high-end apartment buildings. The research aims to design and build a prototype elevator system incorporating voice control using an Arduino microcontroller, focusing on motor control and DC motor analysis. The introduction sets the stage for the subsequent sections that detail the methodology, results, and conclusions of the project.
1.1 Background
This subsection provides a detailed overview of the current state of voice recognition technology and its integration into various applications. It emphasizes the need for user-friendly and efficient control systems for elevators, particularly in high-rise buildings and VIP parking facilities. The growing importance of automation and ease of use in modern design is highlighted, setting the stage for the project's justification. The discussion of voice control's benefits lays the foundation for understanding the research's practical and technological significance. This sets the context for the research question and proposed solution.
1.2 Research Objectives
This subsection clearly outlines the specific goals of the research. The primary objective is the design and construction of a prototype voice-controlled elevator using an Arduino microcontroller. Secondary objectives include a thorough analysis of the DC motor's performance under varying load conditions, as well as an in-depth examination of the elevator's control system. These objectives demonstrate a multi-faceted approach that encompasses both practical implementation and theoretical analysis.
1.3 Problem Statement
The research questions addressed are explicitly defined here. The key questions revolve around the design and implementation of the voice control system integrated with the Arduino microcontroller and the evaluation of motor power consumption under varying loads. The problem statement helps to focus the research and clarifies the specific challenges that the study aims to overcome.
1.4 Scope and Limitations
This subsection clarifies the boundaries of the research. It acknowledges the limitations imposed by factors like the use of a miniature elevator model, the specific choice of microcontroller (Arduino), and the selected voice recognition sensor. The explicit mention of limitations enhances the research’s credibility by showing an understanding of its boundaries and preventing overgeneralizations. It also prepares readers for the specifics of the project’s implementation.
1.5 Benefits of the Research
The anticipated impact and contribution of the research are outlined here. The benefits include offering a new approach to elevator control and a better understanding of motor power consumption under different load conditions. The discussion of potential real-world applications and advancements in elevator technology provides context and emphasizes the potential impact of this specific research. It highlights the potential to improve user convenience and operational efficiency.
1.6 Structure of the Thesis
This subsection provides a roadmap for the reader, outlining the organization of the thesis into chapters, including the introduction, literature review, methodology, results, discussion, conclusion, and references. This section facilitates navigation and allows readers to quickly grasp the overall structure and progression of the research.
II. Literature Review
This section provides a comprehensive overview of existing knowledge related to the research. It covers key topics such as the history and mechanics of elevators, the Arduino platform, LCD displays, voice recognition technologies (including the specifics of voice and speech recognition), the chosen Easy VR Shield 2.0 sensor, and the characteristics and operation of DC motors and motor drivers. This section establishes the theoretical framework and previous research upon which the current work is built.
2.1 Elevators
This subsection details the history and operational principles of elevators, including both geared and gearless systems. It explores relevant aspects of elevator design and safety mechanisms. The historical overview adds to the educational value by providing a richer understanding of the context in which the research is conducted. The explanation of the elevator's mechanical components serves as a foundation for understanding the project's engineering aspects.
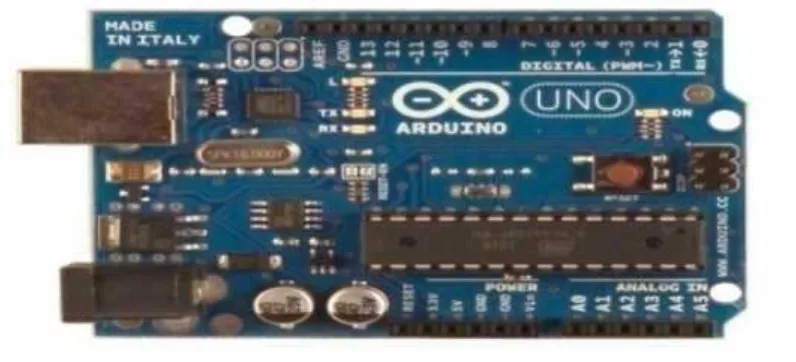
2.2 Arduino Microcontroller
This subsection focuses on the Arduino platform's characteristics and capabilities, particularly the Arduino Uno board used in the project. It provides technical specifications and details about the board's components, highlighting its suitability for the task. The description of the Arduino IDE and programming language is relevant to the educational objectives, demonstrating how the microcontroller is programmed and controlled. This information is important for practical application and understanding of the project.
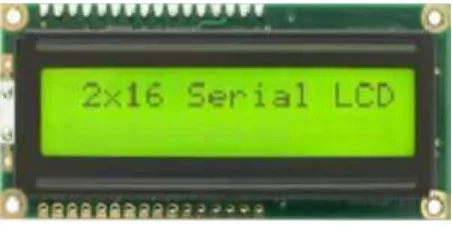
2.3 Liquid Crystal Display (LCD)
This subsection explains the functionality and working principle of an LCD, emphasizing its role in providing feedback to the user. It covers technical aspects of LCDs and their interaction with the microcontroller. A discussion of the LCD's role in user interaction and feedback mechanisms is crucial for understanding the complete system design. The technical details are useful for understanding how it integrates with the Arduino.
2.4 Voice Recognition and Speech Recognition
This subsection differentiates between voice and speech recognition, focusing on the principles and applications of each. It clarifies the chosen approach for the research project, explaining why voice recognition was selected over speech recognition. This highlights the importance of understanding the nuanced differences between these technologies and provides a rationale for the research design. It also touches on relevant theories such as Hidden Markov Models (HMM).
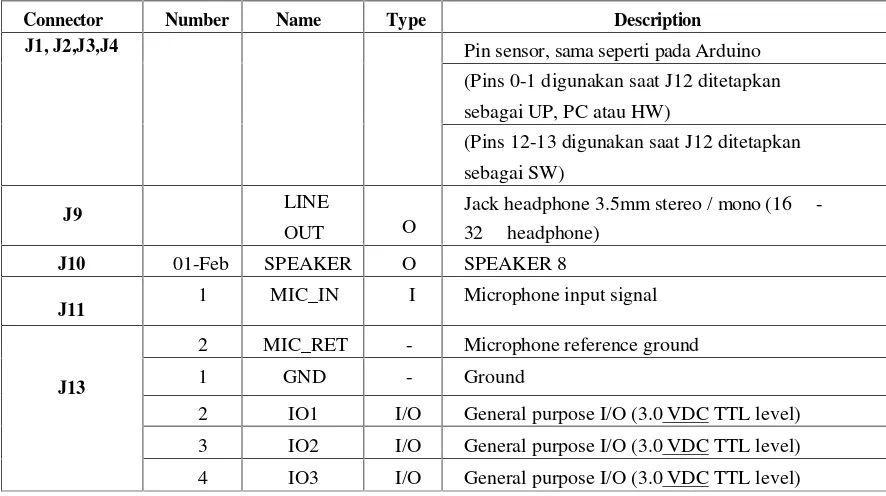
2.5 Easy VR Shield 2.0 Sensor
This section describes the functionality and specifications of the Easy VR Shield 2.0 voice recognition sensor, including its supported languages and features. It details the sensor's technical characteristics and how it interfaces with the Arduino. This section is crucial for understanding the choice of sensor and its role in the overall system. The detailed description is important for the replication of the research.
2.6 DC Motor
This subsection covers the fundamental principles of DC motors, including their construction, working principles, and performance characteristics. It explores the relationship between voltage, current, and motor speed. This is essential for understanding the motor's role in the elevator system. The theoretical background on DC motors lays the foundation for the experimental results and analysis.
2.7 Motor Driver
This subsection explains the function of a motor driver and the selection of a specific IC, such as the L298N, for driving the DC motor. It explores the H-Bridge principle and its importance in controlling the motor's direction and speed. Understanding the motor driver is crucial for grasping the power handling capabilities and safety mechanisms in the elevator design. The information enhances the pedagogical value of the research.
III. Research Methodology
This section details the research process, from the initial planning and design stages to the final testing and data analysis. It describes the tools, materials, and software used. It also presents a detailed explanation of the experimental setup and procedures, including the different load variations applied during testing.
3.1 Time and Location of Research
This subsection provides specific details on the research timeline and location. The information is essential for reproducibility and clarifies the research environment. It also establishes the context of the research activity.
3.2 Tools and Materials
This subsection lists the tools, equipment, and materials used throughout the research process. This section is crucial for replication of the research and helps to clarify the experimental setup. The detailed list of equipment establishes the resources needed and helps to validate the rigor of the methodology.
3.3 Design and Implementation Steps
This subsection outlines the systematic steps taken during the design and construction of the prototype elevator, from initial specifications to the final testing. This detailed explanation enhances the educational value by illustrating a structured approach to problem-solving and design. The step-by-step account enables replication and promotes understanding of the entire process.
3.3.1 Flowchart of the Research Process
This subsection visually represents the research process through a flowchart. It offers a concise overview of the research stages, enhancing understanding and clarifying the logical flow. The visual representation provides an easy-to-follow summary of the methodology, aiding in comprehension and promoting better understanding of the research design.
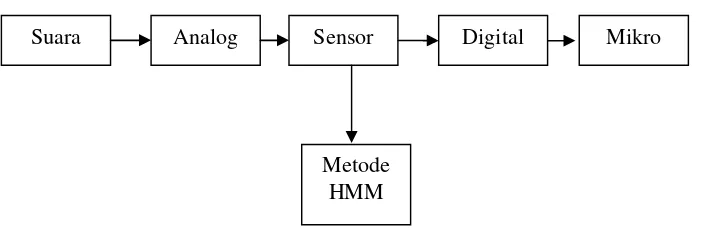
3.3.2 Block Diagram of the System Design
This section provides a detailed block diagram of the system, illustrating the interconnection of various components. The visual representation allows for a quick grasp of the system’s architecture and interaction between its components. The diagram offers a clear depiction of how the different elements of the system are integrated and function together.
3.4 System Analysis
This subsection analyzes the overall system's design, including the voice recognition sensor, Arduino, motor driver, and DC motor. This section is important for understanding the system's operational principles and functionality. The analysis contributes to the educational objectives by providing a deeper understanding of the technical aspects of the prototype.
IV. Results and Discussion
This section presents the findings of the research, including the results of the experimental testing and the analysis of the collected data. It explains the relationship between the load weight, motor speed, current, and power consumption. It also discusses any unexpected findings or challenges encountered during the research process. The discussion section interprets the results and connects them with the theoretical framework presented in the literature review.
4.1 Design of the Device
This subsection details the final design of the prototype, describing its physical construction and the integration of the different components. This section shows the practical outcome of the design process. Detailed descriptions and images of the physical prototype are beneficial for understanding the implementation of the research.
4.2 Hardware Implementation and Testing
This subsection describes the construction and initial testing phases, explaining how the system was built and the initial tests conducted. It highlights any challenges faced during this process. This section connects the theoretical aspects to the practical implementation, showing the challenges of translating the design into a working prototype.
4.3 Hardware Testing
This section presents the results of the hardware testing process, providing detailed information on how the hardware components performed in the system. This evaluation demonstrates the functioning of the system and its response to various inputs. This section evaluates the performance of the hardware components and assesses their suitability for the intended purpose.
4.4 Load Testing
This subsection presents the results of load tests performed on the elevator prototype, analyzing the system's behavior under different weights. This quantitative analysis is key to understanding the system's limitations and efficiency. This data-driven analysis provides valuable insights into the system's performance and the relationship between load and power consumption.
4.5 Motor Power Calculation
This subsection shows calculations of the motor's power consumption under various loads, providing numerical data to support the observations made during testing. This supports the claims made about the system's energy efficiency. The quantitative analysis provides empirical evidence to support the claims and conclusions drawn from the research.
4.6 Software
This subsection describes the Arduino software (firmware) used to control the elevator, including code snippets and explanations. This section connects the hardware and software components to show their interaction. The explanation of the software enhances the educational value by providing insight into the algorithms and control logic.
V. Conclusion and Recommendations
This section summarizes the key findings of the research, reiterating the main conclusions drawn from the data analysis. It also provides recommendations for future research and improvements to the design. This section provides a clear summary of the research's outcome and suggests directions for future work.
5.1 Conclusion
This subsection restates the main findings of the research, summarizing the successful implementation of the voice-controlled elevator prototype and highlighting the relationship between load and motor performance. This provides a succinct summary of the most important findings, reinforcing the key takeaways from the research.
5.2 Recommendations
This subsection suggests areas for future improvement and further research. These recommendations provide valuable insights for enhancing the elevator's performance and expanding the scope of the research. This section encourages further exploration of the topic and suggests potential avenues for future research.
Referensi Dokumen
- Mesin-mesin listrik-edisi keempat ( A.E. Fizgerald, Kingsley Charles, Umans D Stephen, dan Achyanto Djoko )
- 24 Jam Pintar Pemrograman Android E-Book Ver.2.1 ( A.H. Arif )
- Speech Recognition Untuk Kendali Lift Bagi Penyandang Difabel ( Andriana )
- Study Pengaturan Kecepatan Motor Dc Shunt Dengan Metode Ward Leonard ( Harind Dimas )
- Panduan Praktis Mempelajari Mikrokontroler Dan Pemrograman Menggunakan Arduino ( Abdul. Kadir )
- Mesin Arus Searah ( Sumanto )
- Rancang Bangun Pengendali Kecepatan Putar Dan Pengereman Motor Dc Menggunakan Perintah Suara Dengan Memanfaatkan Fitur Speech Recognition Pada Sistem Operasi Android ( Susanto Rizky D )
- Android Programming with Eclipse ( Tim Wahana Komputer )
- Dasar – Dasar Mesin Listik ( Mochtar Wijaya )
- Dasar Teknik Tenaga Listrik Dan Elektronika Daya ( Zuhal )
![Gambar 2.5 Motor DC sederhana[8]](https://thumb-ap.123doks.com/thumbv2/123dok/665900.172432/38.595.243.421.140.273/gambar-motor-dc-sederhana.webp)
![Gambar 2.6 Medan magnet yang membawa arus mengelilingi konduktor[7]](https://thumb-ap.123doks.com/thumbv2/123dok/665900.172432/39.595.199.467.475.643/gambar-medan-magnet-yang-membawa-arus-mengelilingi-konduktor.webp)
![Gambar 2.7 Reaksi garis fluks[7]](https://thumb-ap.123doks.com/thumbv2/123dok/665900.172432/40.595.185.447.283.401/gambar-reaksi-garis-fluks.webp)
![Gambar 2.8 Prinsip kerja motor DC[7]](https://thumb-ap.123doks.com/thumbv2/123dok/665900.172432/41.595.269.351.229.367/gambar-prinsip-kerja-motor-dc.webp)
![Gambar 2.9 Diagram blok L298N[5]](https://thumb-ap.123doks.com/thumbv2/123dok/665900.172432/42.595.198.387.177.434/gambar-diagram-blok-l-n.webp)
![Gambar 2.11 Deskripsi pin L298N[5]](https://thumb-ap.123doks.com/thumbv2/123dok/665900.172432/43.595.203.492.234.415/gambar-deskripsi-pin-l-n.webp)
