DAFTAR PUSTAKA
Richard Dipl, B.2003. Dasar Elektronika. Yogyakarta: Andi.
Budiharto, Widodo.2005. Panduan lengkap belajar mikrokontroler perancangan
sistem dan aplikasi mikrokontroler. Jakarta: PT Elex Media Komputindo.
Ibrahim, Kf. 1986. Prinsip Dasar Elektronika. Jakarta: PT Elex Media Komutindo.
BAB III
SISTEM KERJA RANGKAIAN
3.1 Blok Diagram
Blok diagram sistem merupakan diagram dasar yang menggambarkan proses atau aliran kerja dari sistem mulai dari input hingga output.
Pada rancangan ini dimana input dari sistem adalah keadaan ada tidaknya objek yang melewati sensor. Dalam hal ini adalah objek kereta api yang datang dan akan melewati suatu simpang penyebrangan, dengan demikian input merupakan suatu keadaan ada tidaknya kereta api yang datang dan melewati sensor.
Output sensor akan diberikan ke bagian proses untuk diolah menjadi suatu output proses adalah suatu pekerjaan dalam hal ini pekerjaan untuk membaca kondisi dan mengendalikan output sebagai proses digunakan sebuah rangkaian kontroler yang di program untuk mengendalikan sistem.
Gambar 3.1 Diagram blok
3.2 Perancangan Power Suplay (PSA)
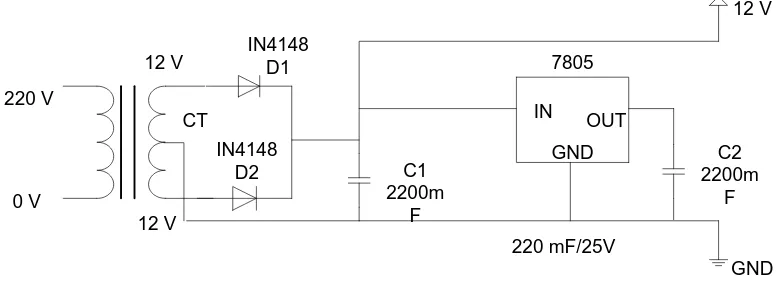
Rangkaian ini berfungsi untuk mensupplay tegangan ke seluruh rangkaian yang ada. Rangkaian PSA yang dibuat terdiri dari dua keluaran, yaitu 5 volt, keluaran 5volt yang digunakan untuk mensupplay tegangan keseluruh rangkaian. Rangkaian power supplay ditunjukkna pada gambar berikut ini:
220 V 0 V 12 V CT 12 V IN4148 D1 IN4148 D2 C1 2200m F IN OUT GND 12 V GND 220 mF/25V 7805 C2 2200m F
Gambar 3.2 Rangkaian Power Supplay ( PSA )
Trafo CT merupakan trafo stepdown yang befungsi untuk menurunkaan tegangan dari 220 volt AC menjadi 12 volt AC. Kemudian 12 volt AC akan di searahkan
SENSOR Microkontrol
er AT89S51
BUZER DRIVER
5V VCC 10uF 5V VCC 2 1 30pF 30pF
XTAL 12 MHz
AT89S51 P0.3 (AD3) P0.0 (AD0) P0.1 (AD1) P0.2 (AD2) Vcc P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P1.6 P1.7 P0.4 (AD4) P0.5 (AD5) P0.6 (AD6) P0.7 (AD7) RST EA/VPP P3.0 (RXD) P3.1 (TXD) P3.2 (INT0) P3.3 (INT1) P3.4 (T0) ALE/PROG PSEN P2.7 (A15) P2.6 (A14) P2.5 (A13) P2.4 (A12) P2.3 (A11) P2.2 (A10) P2.1 (A9) P3.6 (WR) P3.5 (T1) P3.7 (RD) XTAL2 XTAL1
GND P2.0 (A8) 1 2 3 4 5 6 7 8 40 39 38 37 36 35 34 33 9 10 11 12 13 14 15 32 31 30 29 28 27 26 16 17 18 19 20 25 24 23 22 21 4.7k 2SA733 5V VCC LED1
dengan menggunakan 2 buah dioda, selanjutnya 12 volt DC akan di ratakan oleh kapasitor 2200 uF.Regulator tegengan 5 volt (LM 7805 CT) digunakan agar keluaran yang di hasilkan tetap 5 volt walaupun terjadi tegangan masukannya. LED hanya sebagai indikator apabila PSA dinyalakan. Tegangan 12 volt DC langsung di ambil dari keluaran dua buah dioda penyearah.
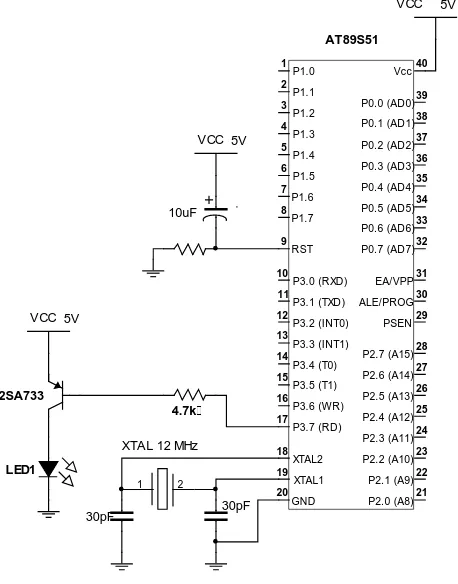
3.3 Rangkaian Mikrokontroler AT89S51
Rangkaian ini berfungsi sebagai pusat kendali dari seluruh sistem yang ada. Komponen utama dari rangkaian ini adalah IC Mikrokontroler AT89S51. Pada IC inilah semua program diisikan, sehingga rangkaian dapat berjalan sesuai dengan yang di kehendaki. Rangkaian Mikrokontroler di tunjuk pada gambar berikut ini.
3.4 Rangkain pemancar dan penerima infra merah
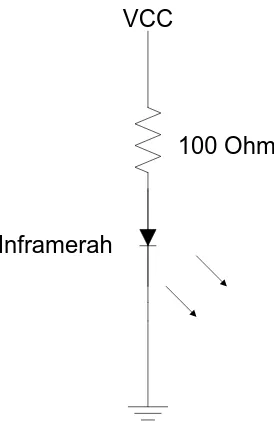
Inframerah digunakan untuk menerima pancaran dari fotodioda. Dimana pada alat ini untuk mendapatkan hasil yang lebih efisien fotodioda memancarkan dan inframerah lah yang akan menerima. Untuk pemancarnya di gunakan sebuah LED inframerah. Sensor ini memanfaatkan pantulan dari pemancar inframerah yang diterima oleh fotodioda rangkaian pemancar inframerah di tunjukkan pada gambar berikut ini:
VCC
100 Ohm
Inframerah
Gambar 3.4 Rangkaian Pemancar Inframerah
Pada rangkaian di atas di gunakan sebuah LED inframerah yang di serikan dengan sebuah resistor 100 ohm. Resistor yang di gunakan adalah 100 ohm sehingga arus yang mengalir pada masing-masing LED inframerah adalah sebesar
dengan besarnya arus yang mengalir ke LED inframerah maka intensitas pancaran inframerah akan semakin kuat yang menyebabkan jarak pantulannya akan semakin jauh.
Pantulan dari sinar inframerah akan diterima oleh fotodioda, kemudian akan diolah oleh rangkaian penerima agar menghasilkan data biner, dimana jika fotodioda menerima pantulan sinar inframerah maka output dari rangkaian penerima ini akan mengeluarkan logika low (0), namun jika fotodioda tidak menerima pantulan sinsr inframerah, maka output dari rangkaian penerima akan mengeluarkan logika high (1).
Photodioda memiliki hambatan sekitar 15 s/d 20 Mohm jika tidak terkena sinar inframerah, dan hambatannya akan berubah menjadi sekitar 80 s/d 300 Kohm jika terkena sinar inframerah tergantung dari besarnya intensitas yang mengenainya, maka hambatannya semakin kecil.
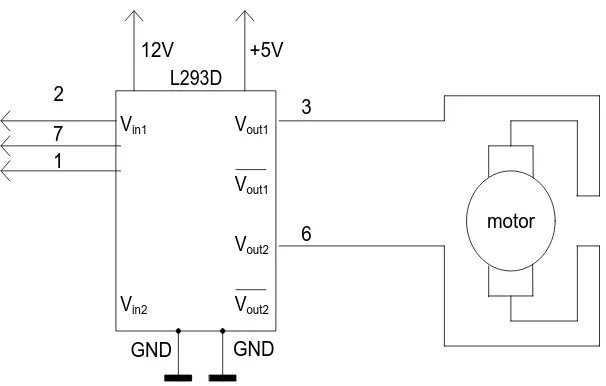
3.5 Perancangan Rangkaian Driver Motor DC
7 1
Vin1
Vin2
Vout1
Vout1
Vout2
Vout2 L293D
motor 3
6 2
12V +5V
GND GND
Gambar 3.5 Rangkaian Driver Motor DC
Tahanan dalam dari Motor DC = 26 Ohm (dengan Ohm meter)
Kecepatan motor = 100 RPM setiap 12 Volt
Tegangan motor saat menutup pintu = 3.4 Volt
Tegangan motor saat membuka pintu = 3.4 Volt
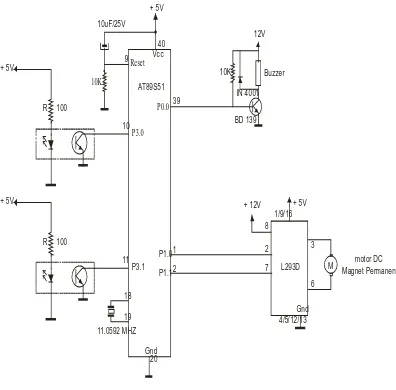
3.6 Perancangan Rangakaian Kendali
terdeteksi datangnya kereta api untuk melewati simpang penyebrangan. Gambar rangkaian di sajikan pada gambar berikut.
10K 10uF/25V 9 40 20 Gnd Vcc + 5V + 5V + 5V Reset AT89S51 11.0592 MHZ 18 10 11 19 R 100
R 100
P3.0 P3.1 4/5/12/13 Gnd + 5V + 12V L293D P1.0 P1.1 2 3 8 1/9/16 1 7 6 M
2 motor DC Magnet Permanen 10K 12V BD 139 IN 4001 39 P0.0 Buzzer
BAB IV
PENGUJIAN RANGKAIAN
4.1 Pengujian Rangkaian Power Supplay ( PSA)
Pengujian pada bagian rangkaian power supplay ini dapat dilakukan dengan mengukur tegangan dari rangkaian ini dengan menggunakan volt meter digital. Dari hasil pengujian diberikan tegangan keluaran sebesar + 5,1volt. Tegangan dipergunakan untuk mensuplai tegangan ke seluruh rangkaian mikrokontroler AT89S51, sedangkan keluaran adalah sebesar + 12,3 volt, power supply bertugas merubah tegangan listrik AC menjadi tergangan listrik DC yang stabil sampai arus maksimum yang ditentukan oleh design. Pengujian dilakukan dengan memberi tegangan 5 volt.
4.2 Pengujian Mikrokontroler AT89S51
sederhana pada mikrokontroler AT89S51. Program yang diberikan adalah sebagai berikut:
BUZZER Bit P0.0
SENSOR1 Bit P3.0 SENSOR2 Bit P3.1 IND Bit P2.0
WAIT: SetB IND Acall Delay_200mS
Clr IND
Acall Delay_200mS
Djnz R1,WAIT
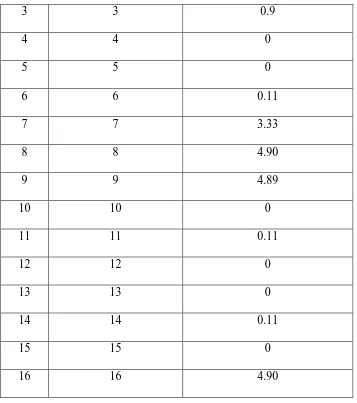
4.3 Pengujian Rangkaian Driver Motor DC
Pengujian pada rangkaian driver dilakukan dengan menghubungkan rangkaian ini dengan rangkaian power supplay sebagai sumber tegangan. Kemudian kaki kaki driver dihubungkan dengan volt meter untuk mengukur tegangan pada masing masing kaki driver dan menghasilkan tegangan sebagai berikut:
NO PIN TEGANGAN (VOLT)
1 1 4.89
3 3 0.9
4 4 0
5 5 0
6 6 0.11
7 7 3.33
8 8 4.90
9 9 4.89
10 10 0
11 11 0.11
12 12 0
13 13 0
14 14 0.11
15 15 0
16 16 4.90
Tabel 4.1 Pengambilan data pada IC L293D
4.4 Pengujian Motor DC
4.5 Pengujian rangkaian Pemancar dan Penerima Inframereah
Pengujian rangkaian pemancar inframerah dilakukan dengan menghubungkan rangkaian pada tegangan 5 volt yang dihasilkan power supplay. Cahaya inframerah tidak tampak secara langsung oleh mata kita jadi kita memerlukan alat bantu untuk dapat melihat apakah cahaya inframerah telah dipancarkan oleh rangkaian pemancarnya, salah satu alat bantu yang dapat kita gunakan adalah camera pada handphone. Jika cahaya inframerah telah dipancarkan maka kita melihat berkas cahaya itu melalui camera handphone dan setelah kita melihat berkas cahaya inframerah tersebut kita dapat memastikan bahwa rangkaian telah berfungsi dengan baik.
Pengujian rangkaian penerima inframerah juga dilakukan dengan menghubungkan rangkaian pada tegangan 5 volt yang dihasilkan power supplay. Sehingga hasil pengukuran dapat dilihat pada table.
kedalaman sensor
output logika
tegangan output tdk tertutup (terhalang)
0 0.02
keadaan tertutup
1 4.87
kedalaman sensor output logika
tegangan output tdk tertutup (terhalang)
0 0.01
keadaan tertutup
1 4.87
4.5.2 Tabel Pengukuran Sensor 2
4.6 Pengujian Driver Transistor BD 139
Pengujian rangkaian driver transistor BD 139 dilakukan menghubungkan dengan rangkaian power supplay. Dimana dengan menghubungkan transistor dengan volt meter dapat dihasilkan tegangan sebagai berikut:
PENGUKURAN DRIVER TRANSISTOR BD139
logika Vb Vc kedalaman Transistor
0 0.09 15.66 of
1 0.7 0 on
4.7 Flowchart
START
SET NILAI AWAL PORT
BACA SENSOR MASUK
ADA SENSOR MASUKAN
TUTUP PALANG PINTU PENYEBRANGAN KERETA
API
BUNYIKAN BUZER SELAMA 10 DETIK
BACA SENSOR KELUAR
SENSOR KELUARAN OK
MATIKAN KEMBALI BUZER BUKA KEMBALI PALANG
Flowchart berikut menjelaskan aliran kerja dari awal hingga selesai suatu proses yaitu mulai dari start program akan menentukan nilai awal port kemudian sensor akan membaca masukan apakah ada kereta api yang akan melintasi penyebrangan atau tidak. Jika terdapat kereta api yang akan lewat sensor akan memberikan logika “ I “ sehingga program akan mendapatkan masukan dan akan dilanjutkan dengan membunyikan buzer tanda peringantan selama 10 detik kemudian program akan menutup pintu palang kereta api. Setelah itu program akan kembali membaca sensor pada sisi keluaran dengan tujuan untuk mendeteksi apakah kereta api telah melewati perlintasan atau penyebrangan.
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari hasil pelaksanaan perancangan alat hingga pengujian dan pembahasan system maka penulis dapat disimpulkan:
1. Mikrokontroler AT89S51 digunakan sebagai alat untuk memproses data dari sistem yang berfungsi untuk mengirimkan perintah ke sensor inframerah
2. Penggunaan sensor inframerah dalam mendeteksi jarak masih sangat terbatas.
3. Kelemahan sensor inframerah ialah mudah terganggu inframerah alam yang dipancarkan oleh matahari.
5.2 Saran
Setelah melakukan penelitian ini diperoleh beberapa hal yang dapat dijadikan saran untuk dapat melakukan penelitian lebih lanjut, yaitu:
2. Untuk dimasa akan datang, agar alat ini dapat ditingkatkan dan dikembangkan yang dilengkapi dengan tampilan lcd untuk menampilkan pemberitahuan yang lebih jelas kepada para penggguna jalan.
BAB II
LANDASAN TEORI
2.1 Sinar Inframerah
Infra merah (infra red) ialah sinar elektromagnet yang panjang gelombangnya lebih dari pada cahaya nampak yaitu di antara 700 nm dan 1 mm. Sinar infra merah merupakan cahaya yang tidak tampak. Jika dilihat dengan dengan spektroskop cahaya maka radiasi cahaya infra merah akan nampak pada spectrum elektromagnet dengan panjang gelombang di atas panjang gelombang cahaya merah. Dengan panjang gelombang ini maka cahaya infra merah ini akan tidak tampak oleh mata namun radiasi panas yang ditimbulkannya masih terasa/dideteksi.
Infra merah dapat dibedakan menjadi tiga daerah yakni:
• Infra Merah dekat ………..0.75 – 1.5 µm • Infra Merah pertengahan ..………1.50 – 10 µm • Infra Merah jauh ………10 – 100 µm
sampai pada transfer data pada PC. Media infra merah ini dapat digunakan baik untuk kontrol aplikasi lain maupun transmisi data.
Sifat-sifat cahaya infra merah:
1. tidak tampak secara kasat mata oleh manusia
2. tidak dapat menembus materi yang tidak tembus pandang 3. dapat ditimbulkan oleh komponen yang menghasilkan panas
Komunikasi inframerah dilakukan dengan menggunakan dioda infra merah sebagai pemancar dan modul penerima infra merah sebagai penerimanya. Untuk jarak yang cukup jauh, kurang lebih tiga sampai lima meter, pancaran data infra merah harus dimodulasikan terlebih dahulu untuk menghindari kerusakkan data akibat noise.
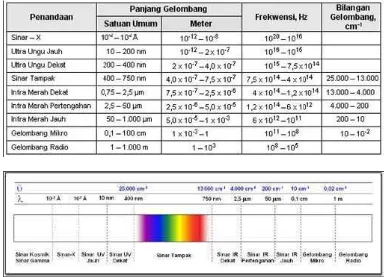
Saat ini telah dikenal berbagai macam gelombang elektromagnetik dengan rentang panjang gelombang tertentu. Spektrum elektromagnetik merupakan kumpulan spektrum dari berbagai panjang gelombang. Berdasarkan pembagian daerah panjang gelombang, sinar inframerah dibagi dalam 3 daerah, yaitu:
1. Daerah inframerah dekat dengan panjang gelombang 0,75 mikrometer 2,5 mikrometer
2. Daerah inframerah pertengahan dengan panjang gelombang 2,5 mikrometer – 50 mikrometer.
Spektrum sinar matahari terdiri dari sinar tampak dan sinar tidak tampak. Dimana sinar tampak meliputi: merah, orange, kuning, hijau, biru, dan ungu. Sinar yang tidak tampak antara lain: sinar ultraviolet, sinar X, sinar gamma, sinar kosmik, microwave, gelombang listrik dan sinar inframerah. Gelombang elektromagnetik diantara sinar tampak dan sinar microwave dinamakan sinar inframerah, dengan karakteristik adalah tidak kasat mata atau tidak terlihat, bersifat linier atau menyebar, refraktif atau dapat dipantulkan dan dapat diserap oleh beberapa obyek.
Di bawah ini terdapat gambar berdasarkan pembagian panjang gelombang, yaitu:
Dari pembagian daerah spektrum elektromagnetik tersebut di atas, daerah panjang gelombang yang digunakan pada alat spektrofotometer inframerah adalah pada daerah inframerah pertengahan, yaitu pada panjang gelombang 2,5 μm – 50 μm atau pada bilangan gelombang 4.000 – 200 cm.
2.2 IC Regulator 7805
Sebuah rangkaian elektronik tidak dapat bekerja tanpa Power Supply (sumber tegangan). Power supply tersebut dapat berupa sumber tegangan AC atau sumber tegangan DC. Tegangan AC adalah tegangan bolak - balik (Alternate Current) seperti tegangan listrik yang berasal dari PLN atau tegangan output dari sebuah transformator. Tegangan DC adalah tegangan searah (Direct Current) seperti tegangan yang berasal dari sebuah accu, battery, atau adaptor.
Sumber tegangan untuk sebuah rangkaian elektronika harus stabil dengan daya yang harus disesuaikan kebutuhan. Contoh, sebuah IC TTL (Transitor Transistor Logic) membutuhkan tegangan DC stabil 5 Volt, IC CMOS membutuhkan tegangan DC stabil 12 Volt, Z80 membutuhkan tegangan DC stabil 5 Volt, dan sebagainya.
Sumber tegangan AC dapat diperoleh di antaranya dari:
1. Listrik PLN yang telah diturunkan dengan trafo step-down 2. Motor Generator
Sumber tegangan DC dapat diperoleh di antaranya dari:
1. Battery (Accu)
2. Adaptor atau power supply dengan sumber awal dari PLN yang telah diturunkan oleh trafo dan disearahkan oleh dioda
3. Solar Cell (tenaga surya)
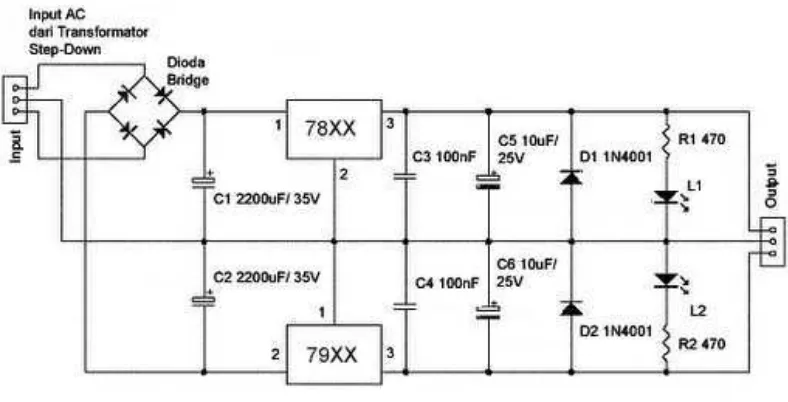
Salah satu metode agar dapat menghasilkan tegangan output DC stabil adalah dengan menggunakan IC 78XX untuk tegangan positif dan IC 79XX untuk tegangan negatif dalam sistem regulator tegangan.Di bawah ini adalah besarnya tegangan output yang dapat dihasilkan IC regulator 78XX dan 79XX dimana XX adalah angka yang menunjukan besar tegangan output stabil.
1. IC 7805 untuk menstabilkan tegangan DC +5 Volt 2. IC 7809 untuk menstabilkan tegangan DC +9 Volt 3. IC 7812 untuk menstabilkan tegangan DC +12 Volt 4. IC 7824 untuk menstabilkan tegangan DC +24 Volt 5. IC 7905 untuk menstabilkan tegangan DC -5 Volt 6. IC 7909 untuk menstabilkan tegangan DC -9 Volt 7. IC 7912 untuk menstabilkan tegangan DC -12 Volt 8. IC 7924 untuk menstabilkan tegangan DC -24 Volt
Gambar 2.2 Skema Elektronik Rangkaian Catu daya IC 78XX
2.3 Mikrokontroler AT89S51
Mikrokontroller merupakan suatu komponen elektronika yang seluruh atau sebagian besar elemennya dikemas dalam satu chip IC, sehingga sering disebut dengan single chip mikrokomputer. Mikrokontroller biasanya dikelompokkan dalam satu keluarga, masing-masing mikrokontroller mempunyai spesifikasi tersendiri namun masih kompatibel dalam pemrogramannya.
Kelebihan mikrokontroller AT89S51 dibandingkan dengan mikrokontroller AT89Cxx adalah sebagai berikut:
karena pada AT89Cxx proses download hanya bisa dilakukan menggunakan downloader board khusus yang terpisah dari board sistem kita, sehingga cukup merepotkan dan membutuhkan development time yang lebih lama (time consuming).
2. AT89S51 memiliki watchdog timer. Watchdog timer adalah fasilitas yang digunakan untuk mengatasi kondisi dimana terjadi kemacetan program akibat kesalahan software. Boleh dikata untuk mengatasi problem semacam hang up pada PC. Watchdog timer ini bekerja seperti counter, yaitu akan mencacah naik setiap clock osilator. Apabila telah mencapai maksismum (terjadi overflow) maka akan menyebabkan program reset. Sehingga dengan memasukkan subrutin tertentu kita bisa memanfaatkan overflow watchdog timer ini untuk mengatasi kondisi hang.
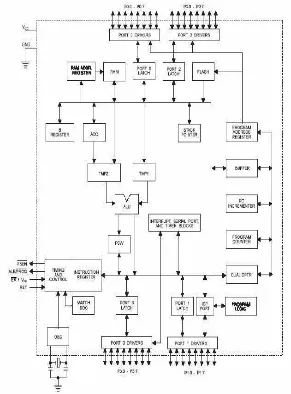
2.3.1 Arsitektur Microcontroller AT89S51
Mikrokontroller AT89S51 merupakan mikrokontroller yang diproduksi oleh Atmel dengan memori Flash sebesar 4 Kbyte “Erasable and Programable Read Only Memory” (EPROM) berteknologi non-volatile (data memori tidak akan hilang saat tegangan catu daya dimatikan) isi memori tersebut dapat diprogram dan dihapus berkali-kali. Mikrokontroller AT89S51 mempunyai memori dengan berstandar code MCS-51, sehingga memungkinkan mikrokontroller ini untuk bekerja dalam mode single chip operation (mode operasi keping tunggal) yang tidak memerlukan external memory (memori luar) untuk menyimpan source code tersebut. MCS-51 merupakan keluarga mikrokontroller 8 bit.
Mikrokontroller AT89S51 terdiri dari sebuah Central Processing Unit (CPU), 2 jenis memori yaitu memori data (RAM) dan memori program (ROM), port input/output dengan programmable pin secara independen, dan register mode, status, internal timer dan counter, serial communication dan serta logika random yang diperlukan oleh berbagai fungsi peripheral.
Mikrokontroller AT89S51 termasuk salah satu jenis mikrokontroller keluarga MCS-51 yang dalam standar DIP (Dual Inline Package) 40 pin yang mempunyai konfigurasi tersendiri. Mikrokontroller AT89S51 memiliki konfigurasi sebagai berikut:
1. Sebuah Central Processing Unit (CPU) 8 bit.
2. Program Counter (PC) dan data pointer (DPTR) 16 bit. 3. Program Status Word (PSW) 8 bit.
4. Stack Pointer (SP) 8 bit.
6. RAM internal 128 byte (on chip) terdiri dari: a. 4 register bank masing-masing 8 register. b. 16 byte yang dapat dialamati pada bit level. c. 80 byte data memori general purpose.
d. Empat buah programmable port, masing-masing terdiri dari 8 buah jalur input/output (I/O).
e. Dua buah timer/counter 16 byte.
f. Sebuah port serial dengan kontrol serial full duplex UART (Universal Asynchronous Receiver Transmitter).
g. Lima buah jalur interrupt (2 buah jalur eksternal dan 3 buah jalur internal).
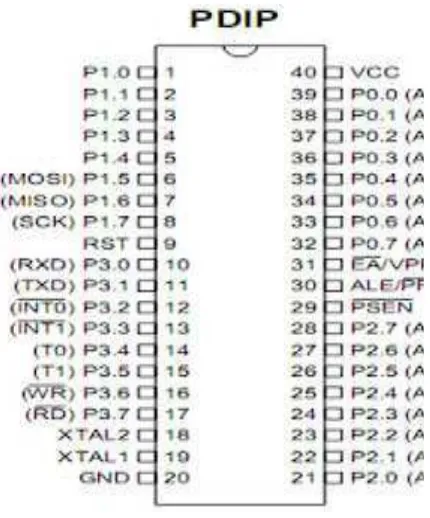
2.3.2 Konfigurasi AT89S51
Konfigurasi mikrokontroller AT89S51 digolongkan menjadi pin-pin sumber tegangan, pin isolator, pin kontrol, pin input/output untuk proses interupsi luar.
Gambar 2.3.1 Konfigurasi Mikrokontroler AT89S51
Berikut ini adalah penjelasan fungsi dari masing-masing pin mikrokontroller AT89S51:
1. Pin 1 sampai 8 (Port 1)
dengan memberikan logika 1. Pada port ini terdapat pin MISO, MOSI dan SCK yang digunakan saat pemrograman dan verifikasi data.
2. Pin 9 (Reset)
Pin ini merupakan masukan Reset (RST). Logika tinggi yang dikenakan pada pin ini selama dua siklus mesin akan membuat mikrokontroller menjalankan rutin reset.
3. Pin 10 sampai 17 (Port 3) Merupakan saluran I/O 8 bit dua arah dengan internal pull-up yang memiliki fungsi khusus. Bila fungsi pengganti tidak difungsikan, port ini dapat digunakan sebagai port paralel 8 bit serba guna.
4. Pin 18 (XTAL 2)
Merupakan keluaran dari oscillator internal. 5. Pin 19 (XTAL 1)
Merupakan masukan ke rangkaian oscillator internal. 6. Oscillator
Oscillator yang disediakan pada chip dikemudikan dengan XTAL yang dihubungkan pada pin 18 dan pin 19. Diperlukan kapasitor penstabil sebesar 30 pF. Besar nilai XTAL sekitar 3 MHz sampai 33 MHz. XTAL1 adalah input ke pembalikan penguat oscillator (inverting oscillator amplifier) dan input ke clock internal pengoperasian rangkaian. Sedangkan XTAL2 adalah output dari pembalikan penguat oscillator. 7. Pin 20 (Ground)
8. Pin 21 sampai 28 (port 2)
Merupakan saluran atau bus I/O 8 bit dua arah biasa atau dapat berfungsi sebagai saluran alamat tinggi (A15-18) pada saat mengakses memori eksternal.
9. Pin 29 Program Store Enable
Merupakan sinyal baca untuk memori program eksternal. Pada saat AT89S51 menjalankan program dari memori program eksternal, diaktifkan dua kali setiap siklus mesin, kecuali pada saat dua aktivasi dilompati selama tiap akses data memori eksternal.
10. Pin 30 Address Latch Enable
Merupakan sebuah pulsa keluaran untuk menahan bit alamat rendah (A0-A7) pada saat mengakses memori eksternal. Pin ini juga berfungsi sebagai pulsa input pemrograman (PROG) selama proses pemograman. 11. Pin 31 Eksternal Access Enable
Digunakan untuk menentukan memori yang digunakan oleh MCS-51 memori program internal atau eksternal. Di catu high jika menggunakan memori program internal dan low jika menggunakan memori program eksternal.
12. Pin 32 sampai 39 (Port 0)
Merupakan port I/O 8 bit dua arah. Port ini sebagai bus alamat rendah (A0-A7) dan bus data (D0-D7).
13. Pin 40 (VCC)
2.4 Kapasitor
Kapasitor adalah komponen elektronika yang dapat menyimpan energi/muatan listrik .Struktur sebuah kapasitor terbuat dari 2 buah plat metal yang dipisahkan oleh suatu bahan dielektrik. Bahan-bahan dielektrik yang umum dikenal misalnya udara vakum, keramik, gelas dan lain-lain. Jika kedua ujung plat metal diberi tegangan listrik, maka muatan-muatan positif akan mengumpul pada salah satu kaki (elektroda) metalnya dan pada saat yang sama muatan-muatan negatif terkumpul pada ujung metal yang satu lagi. Muatan positif tidak dapat mengalir menuju ujung kutub negatif dan sebaliknya muatan negatif tidak bisa menuju ke ujung kutub positif, karena terpisah oleh bahan dielektrik yang nonkonduktif. Muatan elektrik ini tersimpan selama tidak ada konduksi pada ujung-ujung kakinya. Di alam bebas, phenomena kapasitor ini terjadi pada saat terkumpulnya muatan-muatan positif dan negatif di awan.
Dielektrik
Elektroda Elektroda
Gambar 2.4 Skema Kapasitor
arus DC filter, dan penyimpan energi listrik. Diadalamnya 2 buah pelat elektroda yang saling berhadapan dan dipisahkan oleh sebuah insulator. sedangkan bahan yang digunakan sebagai insulator dinamakan dielektrik.
Ketika kapasitor diberikan tegangan DC maka energi listrik disimpan pada tiap elektrodanya. Selama Kapasitor melakukan pengisian, arus mengalir. Aliran arus tersebut akan berhenti bila kapasitor telah penuh. Yang membedakan tiap – tiap kapasitor adalah dielektriknya.
Berikut ini adalah jenis jenis kapasitor:
2.4.1 Electrolytic Capacitor (ELCO)
Kelompok kapasitor electrolytic terdiri dari kapasitor-kapasitor yang bahan dielektriknya adalah lapisan metal-oksida. Umumnya kapasitor yang termasuk kelompok ini adalah kapasitor polar dengan tanda + dan - di badannya. Mengapa kapasitor ini dapat memiliki polaritas, adalah karena proses pembuatannya menggunakan elektrolisa sehingga terbentuk kutub positif anoda dan kutub negatif katoda.
(katoda). Oksigen pada larutan electrolyte terlepas dan mengoksidasi permukaan plat metal. Contohnya, jika digunakan Aluminium, maka akan terbentuk lapisan Aluminium-oksida (Al
[image:34.595.220.404.200.338.2]2O3) pada permukaannya.
Gambar 2.4.1 Kapasitor Elco
2.4.2 Ceramic Capasitor
Gambar 2.4.2 Ceramic Capacitor
2.4.3 Nilai Kapasitor
Untuk mencari nilai dari kapasitor biasanya dilakukan dengan melihat angka atau kode yang tertera pada badan kapsitor tersebut. Untuk kapasitor jenis elektrolit memang mudah, karena nilai kapasitansinya telah tertera dengan jelas pada tubuhnya. Sedangkan untuk kapasitor keramik dan beberapa jenis yang lain nilainya dikodekan.
Tabel 2.4 Nilai Kapasitor
Misalnya suatu kapasitor pada badannya tertulis kode 474J, berarti nilai kapasitansinya adalah 47 + 104 = 470.000 pF = 0,47µF sedangkan toleransinya yang harus diingat didalam mencari nilai kapasitor adalah satuannya dalam pF (Pico Farad).
2.5 Motor DC
diperkirakan bahwa motor menggunakan sekitar 70% beban listrik total di industri.
[image:37.595.215.403.516.700.2]Motor dc memerlukan suplai tegangan yang searah pada kumparan medan untuk diubah menjadi energi mekanik. Kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Jika terjadi putaran pada kumparan jangkar dalam pada medan magnet, maka akan timbul tegangan (GGL) yang berubah-ubah arah pada setiap setengah putaran, sehingga merupakan tegangan bolak-balik. Prinsip kerja dari arus searah adalah membalik phasa tegangan dari gelombang yang mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet. Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas di antara kutub-kutub magnet permanen.
Catu tegangan dc dari baterai menuju ke lilitan melalui sikat yang menyentuh komutator,dua segmen yang terhubung dengan dua ujung lilitan. Kumparan satu lilitan pada gambar di atas disebut angker dinamo. Angker dinamo adalah sebutan untuk komponen yang berputar di antara medan magnet.
Gambar 2.5.1 Prinsip Motor dc
dari jangkar dan medan kemudian saling menolak menyebabkan jangkar berputar terus-menerus.
Gambar 2.5.2 Operasi Motor dc Magnet Permanen
Arah putaran motor dc magnet permanen ditentukan oleh arah arus yang mengalir pada jangkar. Pembalikan ujung-ujung jangkar tidak membalik arahputaran. Salah satu keistimewaan motor dc ini adalah kecepatannya dapat dikontrol dengan mudah. Kecepatan motor magnet permanen berbanding langsung dengan harga tegangan yang diberikan pada jangkar. Semakin besar tegangan jangkar, semakin tinggi kecepatan motor.
dapat dianggap sebagai suatu beban yang dapat dihubungkan langsung ke rangkaian switching arus DC. Oleh karena itu, pemilihan yang tepat cukup diperoleh dengan memperhatikan besar kebutuhan arus untuk memutar motor DC secara nominal. Lilitan pada motor DC dapat diidentikkan dengan lilitan pada kumparan relay sehingga rangkaian drivernya relative sama. Tujuan motor DC adalah untuk menghasilkan gaya yang menggerakkan (torsi). pada beberapa kasus sering diperlukan arah putaran motor DC yang berubah-ubah. Prinsip dasar untuk mengubah arah perputarannya adalah dengan membalik polaritas pada catudaya tegangannya.
2.6 Transistor
Transistor adalah komponen elektronika yang mempunyai tiga buah terminal terminal itu disebut emitor, basis, dan kolektor. Transistor seakan akan dibentuk dari penggabungan dua buah dioda. Dioda satu dengan yang lain saling digabungkan dengan cara menyambungkan salah satu sisi dioda yang senama. Dengan cara penggabungan seperti dapat diperoleh dua buah dioda sehingga menghasilkan transistor NPN. Bahan mentah yang digunakan untuk menghasilkan bahan N dan Bahan P adalah silicon dan germanium.
Oleh karena itu, dikatakan :
1. Transistor Germanium PNP
2. Transistor Silikon NPN
4. Transistor Germanium NPN
[image:42.595.208.415.253.390.2]Semua komponen didalam rangkaian transistor dengan simbol. Anak panah yang terdapat didalam simbol menunjukkan arah yang melalui transistor.
Gambar 2.6 Simbol Tipe Transistor
Keterangan :
C = Kolektor
E = Emitor
B = Basis
Pada daerah penjenuhan nilai resistansi persambungan kolektor emitor secara ideal sama dengan nol atau kolektor dan emitor terhubung langsung (short). Keadaan ini menyebabkan tegangan kolektor emitor (VCE) = 0 volt pada keadaan ideal, tetapi pada kenyataannya VCE bernilai 0 sampai 0,3 volt. Dengan menganalogikan transistor sebagai saklar, transistor tersebut dalam keadaaan on
Gambar 2.6.1 Transistor Sebagai Saklar ON
sebagai saklar, transistor tersebut dalam keadaan off seperti pada gambar dibawah ini :
Gambar 2.6.2 Transistor Sebagai Saklar OFF
2.7 IC Jembatan H l293D
Gambar 2.7 Konfigurasi Pin L293D
L293D mampu melayani 4 buah beban dengan arus nominal 600 mA hingga maksimum 1,2 A. Vs pada pin 8 merupakan masukan sumber tegangan untuk beban, sedangkan Vss pada pin 16 merupakan sumber masukan tegangan untuk L293D. L293D terdiri dari dua pasang jembatan-H yang masing - masing dikendalikan oleh pin enable 1 dan enable 2. Pin enable berfungsi untuk mengontrol keluaran.
2.8 Resistor
film atau metal film tetapi tidak menutup kemungkinan untuk dibuat dari material yang lain.
Pada dasarnya semua bahan memliki sifat resistif namun beberapa bahan tembaga perak dan emas dan bahan metal umumnya memiliki resistansi yang sangat kecil. Bahan bahan tersebut menghantar arus listrik dengan baik, sehingga dinamakan konduktor. Kebalikan dari bahan yang konduktif, bahan bahan material seperti karet ,gelas, karbon memilki resistansi yang lebih besar menahan aliran elektron dan disebut sebagai isolator.
2.8.1 Fixed Resistor
Resistor adalah komponen dasar elektronika yang digunakan untuk membatasi jumlah arus yang mengalir dalam suatu rangkaian. Sesuai dengan namanya resistor bersifat resistif dan umumnya terbuat dari bahan karbon.
Gambar 2.8 Resistor karbon
Resistansi dibaca dari warna gelang yang paling depan kearah gelang toleransi berwarna coklat, emas, atau perak. Biasanya warna gelang toleransi ini berada pada bahan resistor yang paling pojok atau juga dengan lebar yang lebih menonjol, sedangkan warna gelang yang keempat agak sedikir ke dalam. dengan demikian pemakai sudah langsung mengetahui berapa toleransi dari resistor tersebut. Jika anda telah bisa menentukan mana gelang pertama selanjutnya adalah membaca nilai resistansinya.
2.8.2 Variable Resistor
Untuk kelas resistor yang kedua ini terdapat 2 tipe. Untuk tipe pertama dinamakan variable resistor dan nilainya dapat diubah sesuai keinginan dengan mudah dan sering digunakan untuk pengaturan volume, bass, balance, dll. Sedangkan yang kedua adalah semi fixed resistor. Nilai dari resistor ini biasanya hanya diubah pada kondisi tertentu saja. Contoh penggunaan dari semi fixed resistor adalah tegangan referensi yang digunakan untuk ADC, fine tune circuit, dll. Ada beberapa model pengaturan nilai variable resistor, yang sering digunakan adalah dengan cara memutar. Pengubahan nilai dengan cara memutar biasanya terbatas sampai 300 derajat putaran. Ada beberapa model variable resistor yang harus diputar berkali – kali untuk mendapatkan semua nilai resistor. Model ini dinamakan “Potentiometers” atau “Trimmer Potentiometers” .
Penggunaan alat bantu potensiometer banyak digunakan sebagai kontrol pengguna, dan dapat mengontrol berbagai fungsi yang sangat luas peralatannya. tetapi meluasnya dalam penggunaan potensiometer pada barang elektronik konsumen telah menurun pada 1990 an, dengan adanya kontrol digital yang sekarang lebih umum digunakan.
kenyaringan, redaman frekuensi dan karakteristik lain dari sinyal audio dalam audio control.The 'pot log' potensiometer juga digunakan sebagai kontrol volume di amplifier audio, di mana ia juga disebut "lancip pot audio", karena respon amplitudo dari telinga manusia juga logaritma. Memastikan bahwa, pada kontrol volume ditandai 0 hingga 10, misalnya, pengaturan dari 5 suara setengah keras sebagai pengaturan 10. Ada juga sebuah pot anti-log atau lancip audio sebaliknya yang hanya kebalikan dari potensiometer logaritmik. Hal ini hampir selalu digunakan dalam konfigurasi mengeroyok dengan potensiometer logaritmik, misalnya, dalam kontrol keseimbangan audio.
Adapun fungsi potensiometer sebagai kontrol nada atau equalizer dalam penggunaan kombinasi dan jaringan filter, sebelumnya untuk televisi dipergunakan untuk mengontrol kecerahan gambar, kontras, dan respon warna. Sebuah potensiometer sering digunakan untuk mengatur "menahan vertikal", yang mempengaruhi sinkronisasi antara menyapu sirkuit internal penerima (kadang-kadang multivibrator).
2.9 Dioda
Dioda adalah merupakan jenis komponen pasif. Dioda memiliki dua kaki/kutub yaitu kaki anoda dan kaki katoda . Dioda terbuat dari bahan semi konduktor tipe P dan semi konduktor tipe N yang di sambungkan.
Semi konduktor tipe P berfungsi sebagai Anoda dan semi konduktor tipe N berfungsi sebagai katoda. Pada daerah sambungan 2 jenis semi konduktor yang berlawanan ini akan muncul daerah deplesi yang akan membentuk gaya barier.Gaya barier ini dapat ditembus dengan tegangan positif sebesar 0.7 volt yang dinamakan sebagai break down voltage, yaitu tegangan minimum dimana dioda akan bersifat sebagai konduktor/penghantar arus listrik.
Dioda bersifat menghantarkan arus listrik hanya pada satu arah saja, yaitu jika kutub anoda kita hubungkan pada tegangan positif dan kutub katoda kita hubungkan dengan tegangan negatif (kita beri bias maju dengan tegangan yang lebih besar dari 0.7 volt) maka akan mengalir arus listrik dari anoda ke katoda (bersifat konduktor). Jika polaritasnya kita balik (kita beri bias mundur) maka arus yang mengalir hampir nol atau dioda akan bersifat sebagai isulator.
2.9.1 Karakteristik Dioda
Sifat umum diode adalah hanya dapat menghantarkan arus listrik ke satu arah saja. Oleh karena itu bila pemasangan dioda terbalik maka dioda tidak akan dapat menghantarkan arus listrik. Prinsip ini biasanya digunakan sebagai pengaman alat untuk menunjukkan benar atau salah penyambungan catu daya.
Dioda memiliki dua elektroda (kaki), yaitu anoda dan katoda.Kaki – kaki ini tidak boleh terbalik pemasangannya. Kaki katoda biasanya dekat dengan tanda cincin sedangkan kaki yang jauh dari tanda cincin berarti kaki anoda. Jika P (anoda) diberi tegangan positif dan N ( katoda) diberi tegangan negatif maka pemberian tegangan ini disebut bias maju (biased forward), seperti yang diperlihatkan pada gambar a. sebaliknya, bila diberi tegangan yang terbalik yaitu P (anoda) diberi tegangan ini disebut bias mundur (biased reverse). Pada keadaan ini,arus yang mengalir dalam dioda sangat kecil sehingga dapat diabaikan.
N P
A K
-+
N P
A K
- +
= 0
[image:52.595.175.448.82.255.2]b. Bias Mundur (Biased Forward)
Gambar 2.9 Sifat Dioda Bias Maju dan Bias Mundur
Pada saat diberi bias forward, dioda dapat dialiri arus dengan resistansi yang cukup kecil,yang dikenal dengan nama resistansi maju (forward).Sebaliknya jika dioda diberi bias reverse, maka arus listrik akan mengalami resistansi yang amat sangat besar dan disebut resistansi reverse. Dioda dapat dianggap suatu voltage sensitive electronic switch, dimana dioda akan menutup atau dalam kondisi on jika anoda lebih positif dari katoda dan akan terbuka jika kondisi sebaliknya. Macam – macam dioda yang harus diketahui adalah :
1. Dioda Penyearah (Rectifier)
2. Dioda Zener
2.9.2 Dioda Penyearah (Rectifier)
Dioda ini biasanya digunakan pada power supply, namun digunakan juga pada rangkaian radio sebagai detector, dan lain lain. Prinsip kerja dari dioda penyearah adalah sebagai berikut :
Gmabr 2.9.1 Dioda Penyearah Yang Diberi Arus Bolak Balik (AC)
Arus AC yang mendorong electron keatas melalui resistor, saat melewati dioda hanya ½ periode positif dari tegangan input yang akan memberikan biased forward pada dioda, sehingga dioda akan mengantarkan selama ½ periode positf. Tetapi untuk ½ periode negatif , dioda dibias reverse dan terjadilah penyumbatan karena kecil sekali arus yang dapat mengalir. dengan demikian arus AC telah disearahkan oleh dioda ini menjadi arus yang searah (DC).
2.9.3 Dioda Zener
Gambar 2.9.2 Simbol Dioda Zener
2.9.4 Dioda Cahaya (LED = Light Emiting Diode)
LED merupakan salah satu jenis dioda yang mengubah energi, perpindahan elektron-elektron yang jatuh dari pita konduksi ke pita valensi menjadi cahaya berwarna warni, cahaya yang dipancarkan ini dikarenakan jenis bahan yang digunakan berbeda beda. Bahan bahannya anatara lain gallium, arsen, dan fosfor. Penggunaan LED biasanya berhubungan dengan segala hal yang dilihat oleh manusia, seperti untuk mesin hitung,jam digital, dan lain lain.
3.0 Bahasa Assembly MCS - 51
Secara fisik, kerja dari sebuah mikrokontroler dapat dijelaskan sebagai siklus pembacaan instruksi yang tersimpan di dalam memori. Mikrokontroler menentukan alamat dari memori program yang akan dibaca, dan melakukan proses baca data di memori. Data yang dibaca di interprestasikan sebagai instruksi. Alamat instruksi disimpan oleh mikrokontroler di register, yang dikenal sebagai program counter. Instruksi ini misalnya program aritmatika yang melibatkan 2 register. Sarana yang ada dalam program assembly sangat minim, tidak seperti dalam bahasa pemrograman tingkat atas (high level language programming) semuanya sudah siap pakai. Penulis program assembly harus menentukan segalanya, menentukan letak program yang ditulisnya dalam memori-program, membuat data konstan dan tablel konstan dalam memori-program, membuat variabel yang dipakai kerja dalam memori – data dan lain sebagainya.
3.1 Program sumber assembly
Program – sumber assembly (assembly source program) merupakan kumpulan dari baris-baris perintah yang ditulis dengan program penyunting teks (text editor) sederhana, misalnya program EDIT.COM dalam DOS, atau program NOTEPAD dalam Windows atau MIDE-51. Kumpulan baris perintah tersebut biasanya disimpan ke dalam file dengan nama ekstensi. ASM dan lain sebagainya, tergantung pada program assembler yang akan dipakai untuk
mengolah program sumber assembly tersebut.
perintah tidak mungkin dipecah menjadi lebih dari satu baris. Satu baris perintah bisa terdiri atas 4 bagian, bagian pertama dikenali sebagai label atau sering juga disebut sebagai simbol, bagian kedua dikenali sebagai kode operasi, bagian ketiga adalah operand dan bagian terakhir adalah komentar. Antara bagian - bagian tersebut dipisahkan dengan sebuah spasi atau tabulator.
3.2 Bagian label
Label dipakai untuk memberi nama pada sebuah baris-perintah, agar bisa mudah menyebitnya dalam penulisan program. Label bisa ditulis apa saja asalkan diawali dengan huruf, biasa panjangnya tidak lebih dari 16 huruf. Huruf-huruf berikutnya boleh merupakan angka atau tanda titik dan tanda garis bawah. Kalau sebuah baris perintah tidak memiliki bagian label, maka bagian ini boleh tidak ditulis namun spasi atau tabulator sebagai pemisah antara label dan bagian berikutnya mutlak tetap harus ditulis.
3.2 Bagian kode operasi
Kode operasi (operation code atau sering disingkat sebagai OpCode) merupakan bagian perintah yang harus dikerjakan. Dalam hal ini dikenal dua macam kode operasi, yang pertama adalah kode operasi untuk mengatur kerja mikroprosesor / mikrokontroler. Jenis kedua dipakai untuk mengatur kerja program assembler, sering dinamakan sebagai assembler directive.
Kode operasi ditulis dalam bentuk mnemonic, yakni bentuk singkatan-singkatan yang relatip mudah di ingat, misalnya adalah MOV, ACALL, RET dan lain sebagainya. Kode operasi ini ditentukan oleh pabrik pembuat mikroprosesor / mikrokontroler, dengan demikian setiap prosesor mempunyai kode operasi yang berlainan.
Kode operasi berbentuk mnemonic tidak dikenal mikroprosesor mikrokontroler, agar program yang ditulis dengan kode mnemonic bisa dipakai untuk mengendalikan prosesor, program semacam itu diterjemahkan menjadi program yang dibentuk dari kode operasi kode biner, yang dikenali oleh mikroprosesor/mikrokontroler.
3.4 Bagian operand
Operand merupakan pelengkap bagian kode operasi, namun tidak semua kode operasi memerlukan operand, dengan demikian bisa terjadi sebuah baris perintah hanya terdiri dari kode operasi tanpa operand. Sebaliknya ada pula kode operasi yang perlu lebih dari satu operand, dalam hal ini antara operand satu dengan yang lain dipisahkan dengan tanda koma.
Bentuk operand sangat bervariasi, bisa berupa kode-kode yang dipakai untuk menyatakan register dalam prosesor, bisa berupa nomor memori (alamat memori) yang dinyatakan dengan bilangan atau pun nama label, bisa berupa data yang siap di operasikan. Semuanya disesuaikan dengan keperluan dari kode operasi. Untuk membedakan operand yang berupa nomor-memori atau operand yang berupa data yang siap di operasikan, dipakai tanda-tanda khusus atau cara penulisan yang berlainan.
Di samping itu operand bisa berupa persamaan matematis sederhana atau persamaan boolean, dalam hal semacam ini program assembler akan menghitung nilai dari persamaan – persamaan dalam operand, selanjutnya merubah hasil perhitungan tersebut ke kode biner yang dimengerti oleh prosessor. Jadi perhitungan di dalam operand dilakukan oleh program assembler bukan oleh prosesor.
3.5 Bagian komentar
dengan mudah bisa dimengerti maksud tujuan baris bersangkutan, hal ini sangat membantu orang lain yang membaca program. Pemisah bagian komentar dengan bagian sebelumnya adalah tanda spasi atau tabulator, meskipun demikian huruf pertama dari komentar kadang berupa tanda titik koma, merupakan tanda pemisah khusus untuk komentar. Untuk keperluan dokumentasi yang intensip, kadang sebuah baris yang merupakan komentar saja, dalam hal ini huruf pertama dari baris bersangkutan adalah tanda titik koma.
3.6 Assembly Listing
BAB I PENDAHULUAN
1.1 Latar Belakang
Kereta api adalah sarana transportasi berupa kendaraan dengan tenaga gerak, baik berjalan sendiri maupun dirangkaikan dengan kendaraan lainnya, yang akan ataupun sedang bergerak di rel. Kereta api merupakan alat transportasi massal yang umumnya terdiri dari lokomotif (kendaraan dengan tenaga gerak yang berjalan sendiri) dan rangkaian kereta atau gerbong (dirangkaikan dengan kendaraan lainnya).
Jalur perlintasan kereta api merupakan salah satu kawasan yang rawan terjadi kecelakaan. Kepadatan lalu-lintas yang melewati jalur ini dianggap menjadi salah satu penyebabnya. Disisi lain, lemahnya sistem pengamanan di jalur kereta api juga dipandang penentu tingginya kecelekaan di jalur perlintasan kereta api.
Jalur perlintasan kereta api biasanya dipasang palang pintu pengaman dan tanda peringatan kereta api yang akan lewat. Pada sistem konvensional, palang pintu pengaman dan peringatan biasanya diatur secara manual dengan menugaskan seorang operator yang mengendalikan pergerakan palang pengaman. Dalam banyak hal, pengaturan secara manual sering mengalami kesalahan disebabkan keteledoran manusia (human error) yang berakibat sangat fatal terhadap keselamatan pengguna jalur perlintasan kereta api.
pengamanan secara otomatis yang digunakan dalam pengaturan dan pendeteksian datangnya kereta api. Antara lain adalah dengan menggunakan sensor inframereah sebagai sensor pendeteksi.
Dari hal diatas penulis memiliki sebuah ide untuk membuat sebuah prototipe yang dapat mengatur lalu lintas di perlintasan kereta api dengan membuka dan menutup palang pintu perlintasan kereta api secara otomatis. Dimana alat ini mempunyai prinsip untuk membuka dan menutup palang pintu perlintasan dengan cara menempuh dua titik uji yang ditentukan.
1.2 Rumusan Masalah
Berdasarkan uraian yang terdapat dalam latar belakang di atas, maka dalam tugas akhir ini akan di rancang sebuah alat Palang Pintu Otomatis Perlintasan Kereta Api Berbasis Mikrokontroler AT89S51 Menggunakan Bahasa Assembly. Jadi dengan adanya palang pintu perlintasan kereta api otomatis ini maka akan mengurangi kecelakaan yang rawan terjadi di perlintasan kereta api akibat kesalahan manusia atau human error.
1.3 Batasan Masalah
Untuk membahas persoalan agar sesuai dengan tujuan, maka penulis membatasi pembahasan Tugas Akhir. Adapun yang menjadi batasan masalah adalah sebagai berikut :
2. Pembahasan pada hardware dan software komputer terbatas kepada penggunaannya dalam rangkaian tidak dibahas secara rinci.
3. Pusat kendali menggunakan mirokontroler AT89S51 produksi dari ATMEL
4. Pemograman pada mikrokontroler AT89S51 menggunakan bahasa assembly sebagai bahasa pemograman
1.4 Tujuan Penulisan
Adapun tujuan penulisan Tugas Akhir ini adalah membuat sebuah aplikasi sensor inframerah sebagai pendeteksi datangnya Kereta Api dengan menggunakan Mikrokontroler AT89S51. Mempermudah pengguna jalan lebih cepat meengetahui datangnya kereta api yang akan melintasi perlintasan. Dengan sistem ini pengguna jalan tidak perlu khawatir terhadap perlintasan kereta api karena palang pintu penlintasa kereta api akan tertutup dan terbuka secara otomatis
1.5 Sistematika Penulisan
Untuk mempermudah pembahasan daan pemahaman maka penulis membuat sistematika pembahasan bagaimana sebenarnya prinsip kerja dari aplikasi dari Palang Pintu Otomatis Perlintasan Kereta Api Berbasis Mikrokontroler AT 89S51. Maka penulis menulis laporan ini sebagai berikut.
BAB I. PENDAHULUAN
BAB II. LANDASAN TEORI
Landasan teori, dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk pembahasan dan cara kerja dari rangkaian teori pendukung itu antara lain tentang mikrokontroler AT 89S51 (hardware dan software ), bahasa program yaitu bahasa assembly, serta karakteristik dari komponen komponen pendukung.
BAB III. SISTEM KERJA RANGKAIAN
Pada bab ini akan dibahas sistem kerja rangkaian, yaitu diagram blok dari rankaian, skematik dari masing masing rangkaian.
BAB IV. PENGUJIAN ALAT DAN PROGRAM
Pada bab ini akan dibahas hasil analisa dari rangkaian dan sistem kerja alat, penjelasan mengenai program program yang digunakan untuk mengaktifkan rangkaian, penjelasan mengenai program yang diisikan ke mikrokontroler AT89S51.
BAB V. KESIMPULAN DAN SARAN
ABSTRAK
PERANCANGAN PALANG PINTU OTOMATIS REL KERETA API BERBASIS MIKROKONTROLER AT89S51 MENGGUNAKAN BAHASA
ASSEMBLY
TUGAS AKHIR
TIMBUL YERIKO SIAHAAN 092408024
PROGRAM STUDI DIII FISIKA DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERANCANGAN PALANG PINTU OTOMATIS REL KERETA API BERBASIS MIKROKONTROLER AT89S51 MENGGUNAKAN BAHASA
ASSEMBLY
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Ahli Madya
TIMBUL YERIKO SIAHAAN 092408024
PROGRAM STUDI DIII FISIKA DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
JUDUL : PERANCANGAN PALANG PINTU OTOMATIS
REL KERETA API BERBASIS MIKROKONTROLER AT89S51
MENGGUNAKAN BAHASA ASSEMBLY
KATEGORI : TUGAS AKHIR
NAMA : TIMBUL YERIKO SIAHAAN
NIM : 092408024
PROGRAM STUDI : D3 FISIKA
DEPARTEMEN : FISIKA
FAKULTAS : MATEMATIKA DAN ILMU PENGETAHUAN
ALAM (FMIPA)
Diluluskan di
Medan, 19 Juli 2012
Diketahui/Disetujui oleh
Program Studi D3 Fisika Pembimbing
Ketua,
PENGHARGAAN
Puji dan Syukur penulis panjatkan kepada Tuhan Yang Maha Pemurah dan Maha Penyayang dengan limpah karunia-NYA, sehingga penulis dapat menyelesaikan Laporsan Tugas Akhir dalam waktu yang telah ditetapkan.
PERNYATAAN
PERANCANGAN PALANG PINTU OTOMATIS PERLINTASAN KERETA API BERBASIS MIKROKONTROLER AT89S51
MENGGUNAKAN BAHASA ASSEMBLY
TUGAS AKHIR
Saya mengakui bahwa tugas akhir ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing masing disebutkan sumbernya.
Medan, Juli 2012
ABSTRAK
DAFTAR ISI
Halaman
Persetujuan ... i
Penghargaan ... ii
Pernyataan ... iii
Abstrak ... iv
Daftar Isi ... v
Daftar Gambar ...viii
Daftar Tabel ... x
Bab 1 Pendahuluan 1.1. Latar Belakang ... 1
1.2.Rumusan Masalah……….. 2
1.3. Batasan Masalah ... 2
1.4. Tujuan Penulisan ... 3
1.5. Sistematika Penulisan ... 3
Bab 2 Landasan Teori 2.1. Sinar Inframerah ... 5
2.3. Mikrokontroler AT89S51 ... 10
2.3.1. Arsitektur Mikrokontroler AT89S51 ... 12
2.3.2. Konfigurasi AT89S51 ... 15
2.4. Kapasitor ... 18
2.4.1. Electrolytic Capasitor ( ELCO) ... 19
2.4.2. Ceramic Capasitor ... 20
2.4.3. Nilai Kapasitor ... 21
2.5. Motor DC ... 22
2.6. Transistor ... 27
2.7. IC Jembatan H 1293D ... 30
2.8. Resistor ... 31
2.8.1. Fixed Resistor ... 32
2.8.2. Variabel Resistor ... 34
2.9. Dioda ... 36
2.9.1. Karakteristik Dioda ... 37
2.9.2. Dioda Penyearah (Rectifier) ... 39
2.9.3. Dioda Zener ... 39
2.9.4. Dioda Cahaya (LED) ... 40
3.0. Bahasa Assembly MCS-51 ...41
3.0.1. Program Super Assembly ... 41
3.0.2. Bagian Label ... 42
3.0.3.Bagian Kode Operasi ...43
3.0.4. Bagian Operand ... 44
3.0.6. Assembly Listing ... 45
Bab 3 Sistem Kerja Rangkaian 3.1. Diagram Blok ... 46
3.2. Perancangan Power Suplay (PSA) ... 47
3.3. Rangkaian Mikrokontroler AT89S51 ... 48
3.4. Rangkaian Pemancar dan Penerima Inframerah ... 50
3.5. Perancangan Rangkaian Driver Motor DC ... 51
3.6. Perancangan Rangkaian Kendali ... 52
Bab 4 Pengujian Rangkaian 4.1. Pengujian Rangkaian Power Suplai (PSA) ... 54
4.2. Pengujian Mikrokontroler AT89S51 ... 54
4.3. Pengujian Rangkaian Diver Motor DC ...55
4.4. Pengujian Motor DC ... 56
4.5. Pengujian Rangkaian Pemancar dan Penerima Inframerah ... 57
4.6. Pengujian Driver Transistor BD 139 ... 58
4.7. Flowchart ... 59
Bab 5 Kesimpulan dan Saran 5.1. Kesimpulan ...61
5.2. Saran ... 61
DAFTAR GAMBAR
Halaman
Gambar 2.1 Karakterisitik Spektrum Elektronika ... 7
Gambar 2.2 Skema Elektornik Rangkaian Catu daya IC 78XX ... 10
Gambar 2.3 Arsitektur Internal Mikrokontroler AT89S51 ... 12
Gambar 2.3.1.Konfigurasi Mikrokontroler AT89S51 ... 15
Gambar 2.4. Skema Kapasitor ... 18
Gambar 2.4.1. Kapasitor Elco ... 20
Gambar 2.4.2. Ceramic Capacitor ... 21
Gambar 2.5. Motor DC ... 23
Gambar 2.5.1. Prinsip Motor DC ... 25
Gambar 2.5.2. Operasi Motor DC Magnet Permanen ... 26
Gambar 2.6. Simbol Tipe Transistor ... 28
Gambar 2.6.1. Transistor Sebagai Saklar ON ... 29
Gambar 2.6.2. Transistor Sebagai Saklar OFF ... 30
Gambar 2.7 Konfigurasi Pin L293D ... 31
Gambar 2.8 Resistor Karbon ... 33
Gambar 2.9 Sifat Dioda Bias Maju dan Bias Mundur ... 38
Gambar 2.9.1 Dioda Penyarah Yang Diberikan Arus AC ... 39
Gambar 2.9.2 Simbol Dioda Zener... 40
Gambar 2.9.3 Simbol Dioda Cahaya ( LED) ... 40
Gambar 3.1 Diagram Blok ... 47
Gambar 3.3 Rangkaian Minimum Mikrokontroler AT89S51 ... 48
Gambar 3.4 Rangkaian Pemancar Inframerah ... 50
Gambar 3.5 Rangkaian Driver Motor DC ... 52
Daftar Tabel
Halaman
Tabel 2.4 Nilai Kapasitor ... 22
Tabel 4.1 Pengambilan Data IC L293... 56
Tabel 4.5.1 Tabel Pengukuran Sensor 1 ... 57
Tabel 4.5.2 Tabel Pengukuran Sensor 2 ... 58