CURRICULUM VITAE
Data Diri
Nama : AndrioSaktiSebayang
Tempat/Tanggal Lahir : Medan, 30 September 1991
AlamatSekarang :Jl. JaminGintingSpParang 2 Medan Alamat Orang Tua :Perbesi, Jl. Kota Cane
Agama : Kristen Protestan Jenis Kelamin : Laki-Laki
Nomor Hp : 081285333101
Email : [email protected]
RiwayatPendidikan
1997 – 2003 : SD Negeri 04 Perbesi 2003 – 2006 : SMP Negeri 2Tigabinanga 2006 – 2009 : SMKPenerbanganMedan
2011 – Sekarang : S1 IlmuKomputerUniversitas Sumatera Utara, Medan
Keahlian
Bahasa : Indonesia, Inggris BahasaPemrograman : C#
Multimedia : Adobe Flash
Design : Photoshop
Perkantoran : Microsoft Office, Microsoft Excel Pengalaman Bekerja
2010 : Praktik Kerja PT Garuda Maintenance Facility (GMF) 2014 : Praktik Kerja Lapangan di Kantor Gubernur Sumatra Utara
Seminar
#include <mega8.h> #include <delay.h>
#define ADC_VREF_TYPE 0x00 // Read the AD conversion result
unsigned int read_adc(unsigned char adc_input) {
ADMUX=adc_input | (ADC_VREF_TYPE & 0xff);
// Delay needed for the stabilization of the ADC input voltage delay_us(10);
// Start the AD conversion ADCSRA|=0x40;
// Wait for the AD conversion to complete while ((ADCSRA & 0x10)==0);
ADCSRA|=0x10; return ADCW; }
unsigned int IR, RIGHT,FRONT,LEFT,i,s,t;
void Read_LSensor(void) //rutin baca sensor ping { PORTD.0 = 1; //
TCNT1=0; //reset counter
void Read_FSensor(void) //rutin baca sensor ping { PORTD.2 = 1; //
void Read_RSensor(void) //rutin baca sensor ping { PORTD.6 = 1; //
TCNT1=0; //reset counter
while (PIND.7 == 0){}; // wait for return pulse
TCCR1B=0x02; // start timer (timer period = 2uS)
while ((PIND.7 == 1) && !(TIFR & 0x80)); // timing the return pulse TCCR1B=0x00; // stop timer
RIGHT = TCNT1/8; }
void maju(void) {for(i=0;i<s;i++){
PORTB.1 =1;PORTB.3 =1;delay_ms(15);PORTB.1 =0;PORTB.3 =0;delay_ms(10); }}
void mundur(void) {for(i=0;i<s;i++){
PORTB.0=1;PORTB.2 =1;delay_ms(15);PORTB.0 =0;PORTB.2 =0;delay_ms(10); }}
void kiri(void) {for(i=0;i<s;i++){
void kanan(void)
PORTB.0 =1;PORTB.3 =1;delay_ms(15);PORTB.0 =0;PORTB.3 =0;delay_ms(10); }}
void putar_kanan(void) {for(i=0;i<s;i++){
DDRB=0xFF;
// Port C initialization PORTC=0xFF; DDRC=0x00;
// Port D initialization PORTD=0xBA; DDRD=0x75;
// ADC initialization
// ADC Clock frequency: 691.200 kHz // ADC Voltage Reference: AREF pin ADMUX=ADC_VREF_TYPE & 0xff; ADCSRA=0x84;
delay_ms(1000);
while (1) {IR = 0;
x: while(IR < 800){IR = read_adc(5);delay_ms(10);} delay_ms(1500);
IR = read_adc(5); if(IR < 800)
{PORTD.4=0;PORTD.5=0;delay_ms(5000);PORTD.4=1;PORTD.5=1; goto x; }
s = 38;putar_kanan();
if(t==2){Read_FSensor();if(FRONT < 300){Read_FSensor();} t=0;} }
delay_ms(500); s = 39;putar_kanan(); delay_ms(500); s = 80;maju(); maju_balik();
delay_ms(500); s = 40;putar_kanan(); delay_ms(500); s = 40; mundur();
delay_ms(1000);
}
Budiharto, W. 2011. Aneka Proyek Mikrokontroller. Graha Ilmu : Yogyakarta. Budiharto, W. & Suhartono, D. 2014 .Artifical Intelligence.Penerbit Andi :
Yogyakarta.
Kusumadewi, S. & Purnomo, H. 2013. Aplikasi Logika Fuzzy untuk Pendukung
Keputusan. Edisi 2. Graha Ilmu : Yogyakarta.
Nababan, Alpredo, 2015. Perancangan Alat Pengukur Jarak Menggunakan Software
Basic Complier-AVR Berbasi Mikrokontroller ATMega8. Skripsi.Universitas
Sumatra Utara : Medan.
Nababan, Budi. 2007. Perancangan Otomatis Robot Line Follower Berbasis
Mikrokontroler AT89S51. Skripsi. Universitas Sumatra Utara : Medan.
Nauriana, 2009. Rancang Bangun Robot Beroda Penghindar Halangan. Skripsi.Universitas Indonesia : Depok.
Siegwart, R.& Nourbakhsh, I.R. 2004. Introduction to Autonomous Mobile Robots. The MIT Press : Cambridge.
Simatupang, Novi Eldiarti. 2010. Rancang Bangun Miniatur Security Ruangan
Menggunakan Pintu Otomatis Berbasis Mikrokontroler AVR ATMega8535.
Skripsi.Universitas Sumatera Utara : Medan.
Susilo, D. 2010.48 Jam Kupas Tuntas Mikrokontroler MCS51 dan AVR. Penerbit Andi : Yogyakarta.
BAB 3
ANALISIS DAN PERANCANGANGAN SISTEM
3.1. Analisis Sistem
Analisis sistem terdiri dari fase-fase berbeda yang mendeskripsikan pengembangan sistem. Dalam tugas akhir ini, ada tiga fase analisis yaitu: analisis masalah, analisis kebutuhan dan analisis proses. Analisis masalah bertujuan untuk memahami kelayakan masalah. Analisis kebutuhan dilakukan untuk menjelaskan fungsi-fungsi yang ditawarkan dan mampu dikerjakan sistem. Sedangkan analisis proses untuk memodelkan tingkah laku sistem.
3.1.1. Analisis Masalah
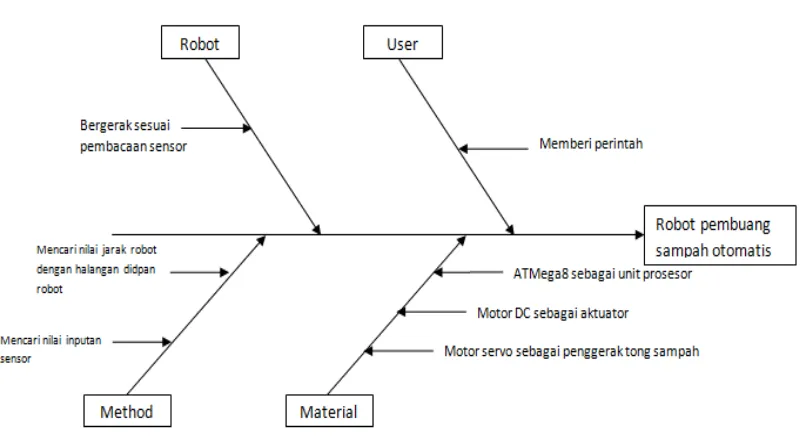
Untuk mengidentifikasi masalah digunakan diagram Ishikawa. Diagram Ishikawa adalah sebuah alat grafis yang digunakan untuk mengidentifikasi, mengeksplorasi dan menggambarkan masalah serta sebab dan akibat dari masalah tersebut. Ini sering disebut juga diagram sebab – akibat atau diagram tulang ikan (fishbone diagram).
Masalah utama adalah dalam melakukan pembuangan sampah sering dilakukan secara manual (karyawan perusahan membuang sampah menggunakan alat seperti tong sampah yang harus di bawa secara manual).
Gambar 3.1 Ishikawa Diagram Pada Robot Pembuang Sampah Otomatis
3.1.2. Analisis Kebutuhan Sistem
Analisis kebutuhan sistem dibagi menjadi dua, yaitu analisis kebutuhan non fungsional dan analisis kebutuhan fungsional. Pada tahapan analisis ini sangat dibutuhkan dalam mendukung kinerja sistem, apakah sistem yang dibuat telah sesuai dengan kebutuhan atau belum, karena kebutuhan sistem akan mendukung tercapainya tujuan yang diharapkan.
3.1.2.1. Analisis Fungsional Sistem
Analisis kebutuhan fungsional merupakan jenis kebutuhan yang berisi proses-proses apa saja yang nantinya dilakukan oleh sistem. Kebutuhan fungsional juga berisi informasi-informasi apa saja yang harus ada dan dihasilkan oleh sistem. Berikut ini adalah kebutuhan fungsional dari sistem, yaitu:
a. Robot dapat menerima perintah yang diinputkan oleh user. b. Robot dapat berjalan
c. Robot dapat bergerak berdasarkan Logika Fuzzy dan membuang sampah ke tempat pembuangan akhir.
3.1.2.2. Analisis Nonfungsional Sistem
Untuk mendukung kinerja sistem, sistem juga dapat berfungsi sebagai berikut :
1. Robot menggunakan saklar agar dapat dioperasikan dengan mudah.
2. Robot dapat menerima inputan dari user. 3. Robot dapat menampilkan.
3.1.3. Permodelan Sistem
Pada penelitian ini digunakan UML (Unified Modelling Language) sebagai bahasa permodelan untuk merancang dan mendesain sistem. Permodelan kebutuhan sistem UML yang digunakan mencakup use case diagram, ishikawa diagram dan activity
diagram.
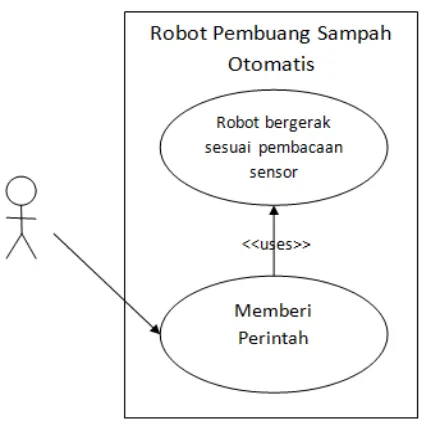
3.1.3.1. Use Case Diagram
Use case diagram merupakan suatu diagram untuk memodelkan interaksi atau dialog
antara sistem dengan user (pengguna) termasuk pertukaran pesan atau tindakan yang dilakukan oleh sistem. Use case diagram diprakarsai oleh aktor yang dapat berupa manusia. Perangkat keras, atau sistem lain yang berinteraksi dengan sistem .
Gambar 3.2 Uses Case Diagram Prototipe Robot Pembuang Sampah Otomatis Tabel 3.1 Dokumentasi Naratif Use Case sistem
Nama Use case Pembuang sampah otomatis
Actors Pengguna
Description Proses ini mendeskripsikan proses pergerakan Robot dengan logika fuzzy
Pre-Condition Sistem dihidupkan (power on)
Basic Flow
Kegiatan pengguna Respon system
Menekan tombol start Menunggu keseluruhan proses inputan selesai
Post-Condition Robot akan bergerak sesuai inputan dari pengguna
3.1.3.2. Activity Diagram
Activity diagram menggambarkan proses-proses yang terjadi ketika aktivitas dimulai
Gambar 3.3 Activity Diagram Prototipe Robot Pembuang Sampah Otomatis
Activity diagram adalah diagram aktivitas yang mendeskripsikan proses kerja
dalam sebuah sistem yang sedang berjalan. Dalam diagram aktivitas ini maka akan dijelaskan proses kerja dari sistem terhadap apa yang dilakukan oleh pengguna (user).
mencapai posisi pembuangan kemuadian kembali ke posisi semula. Gerak robot dipandu oleh sepasah sensor ultrasonik untuk mendeteksi objek di depan dan disamping agar tidak menabrak dindin dan pembatas. Setelah mencapai posisi pembuangan,robot akan menuangkan tempat sampah kemudian berbalik arah kembali ke posisi semula.
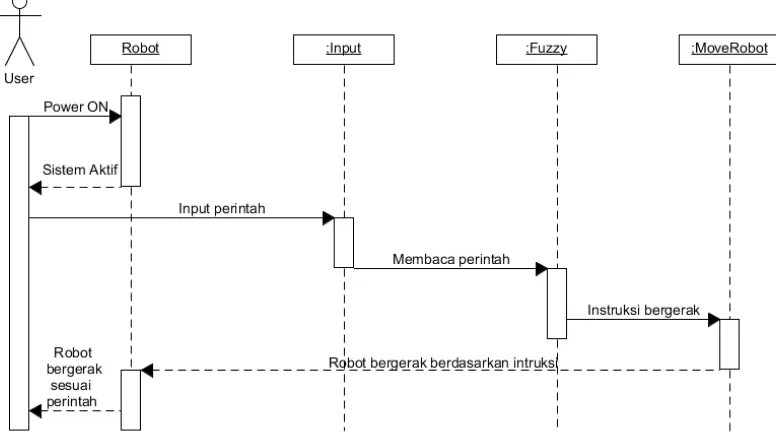
3.1.3.3. Sequence Diagram
Sequence diagram merupakan interaksi antara aktor-aktor yang terdapat dalam suatu
sistem, dan terjadi komunikasi yang berupa pesan. Pada gambar 3.4 berikut dijelaskan
sequence diagram robot pembuang sampah otomatis.
Gambar 3.4 Sequence Diagram Prototipe Robot Pembuang sampah dengan Algoritma Fuzzy
Pada sequence diagram robot pembuang sampah otomatis diatas dapat dilihat
user menghidupkan robot terlebih dahulu (power on). Kemudian sistem diaktifkan,
dari Fuzzy Logic, kemudian robot akan berhenti ketika sistem mendeteksi sensor di pembuangan akhir.
3.2. Perancangan Sistem
Pada tahap perancangan sistem akan dibagi menjadi beberapa bagian utama, yaitu penentuan komponen yang digunakan, perancangan kontruksi robot pembuang sampah otomatis dan perancangan perangkat lunak robot serta algoritma fuzzy.
3.2.1. Komponen yang Digunakan Robot
Komponen yang digunakan dikelompok menjadi dua yaitu komponen fisik dan komponen elektronik. Komponen fisik digunakan untuk membentuk kerangka robot, bagian body utama, mekanis robot. Sedangkan komponen elektronik digunakan untuk membangun sirkuit utama (main circuit ), bagian aktuator. Berikut adalah tabel rincian dari peralatan dan komponen yang digunakan (Tabel 3.2, Tabel 3.3 dan Tabel 3.4).
Tabel 3.2 Tabel Peralatan yang digunakan
Nama Alat Fungsi
Gergaji Sebagai alat potong untuk papan PCB dan fisik robot
Bor Listrik Untuk melubangi papan PCB dan akrilik Gunting Sebagai alat untuk memotong untuk kabel
Lem Polyacryl Sebagai alat untuk merekatkan bagian antar Akrilik
Cutter Untuk memotong Akrilik
Glue Gun Sebagai alat untuk melakukan pengeleman
Penggaris Sebagai alat ukur
Solder dan Timah Sebagai alat untuk Soldering
Obeng Untuk memasang dan membuka baut
Tang Untuk memasang dan membuka komponen
Nama Spesifikasi Keterangan
Tebal 3 mm Sebagai tempat untuk memasang rangkaian
Besi bulat Panjang 20 mm Tiang penguat untuk
akrilik Tong Sampah
Gear Eksternal Diameter 30 mm Untuk memutar tali untuk menarik lengan robot.
Tabel 3.4 Tabel Rincian Komponen Elektronik
Nama Spesifikasi Keterangan
Minimum Sistem Mikrokontroler
ATMega8 Processor Utama
Driver Motor L293D Driver untuk motor DC
Motor DC 12 Volt Akuator Roda
Motor Stepper 12 Volt Akuator Lengan
Komponen Pasif Kapasitor, Resistor, Kristal,Transistor
Komponen Sirkuit
Switch 6 pin Sebagai On/Off Robot
Kabel Pelangi Isi 20, 2 Meter Transmisi konektor
Baterai 6 Volt (2 buah) Sumber tegangan
3.2.2. Perancangan Kontruksi Robot pembuang sampah otomatis
Prototipe robot pembuang sampah otomatis yang akan dirancang ini untuk membantu dan meringankan pekerjaan manusia. Robot pembuang sampah otomatis ini merupakan robot yang diciptakan untuk membantu manusia dan memudahkan pekerjaan manusia. Ada beberapa hal yang menjadi fokus dalam tahap perancangan robot yaitu kerangka robot, aktuator, sirkuit elektronik dan perangkat lunak.
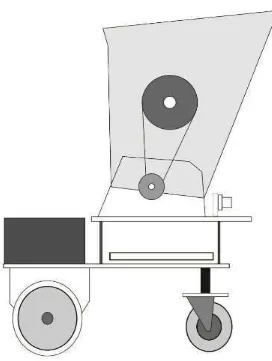
3.2.3. Perancangan Kerangka Robot
Kerangka adalah konstruksi robot yang akan menentukan desain, bentuk dan ukuran dari komponen fisik lainnya. Fungsi utama dari kerangka adalah sebagai tempat atau kedudukan untuk seluruh komponen robot. Disamping itu kerangka juga akan menentukan efisiensi kerja dari robot.
Untuk material kerangka robot dapat digunakan beberapa alternatif bahan seperti bahan dari logam, plastik, dan kayu. Pemilihan material akan sangat berpengaruh terhadap konstruksi robot seperti berat, kekuatan, ketahanan terhadap keretakan dan kemampuan meredam getaran. Perpaduan material yang baik dapat menghasilkan konstruksi yang kuat dan ringan.
Membicarakan soal robot, tidak lepas dari unsur mekanik sebagai kerangka robot. Kerangka robot pembuang sampah otomatis ini terbuat dari bahan plastik yaitu
acrylic. Alasan penggunaan acrylic adalah, karena bahan ini ringan, kuat, tidak mudah
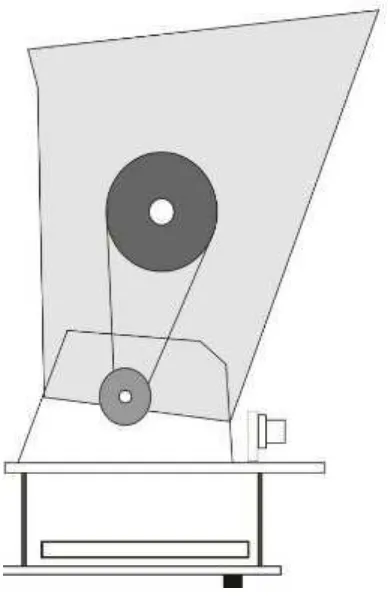
Gambar 3.5 Rancangan Kerangka Robot
Dimana terdapat plat acrylic sebagai tempat baterai, driver motor, gearbox, motor DC, Mikrokontroler ATMega8 dan tong sampah untuk menampung sampah. Robot terdiri dari 3 buah roda ,dimana 2 buah roda terhubung secara mekanik menggunakan
single gearbox dengan motor DC dan 1 buah roda bebas.
3.2.4. Perancangan Aktuator Robot
Aktuator adalah komponen yang berfungsi untuk melakukan gerakan mekanis berdasarkan input perintah dari mikrokontroler (processor). Robot pembuang sampah otomatis ini memiliki 1 komponen mekanis yaitu roda (wheel).
Roda adalah aktuator yang akan digunakan oleh robot pembuang sampah otomatis untuk melakukan pergerakan didarat. untuk penggerak roda digunakan motor DC dan
gearbox untuk meningkatkan torsi motor. Motor DC yang digunakan akan dikontrol
ditentukan berdasarkan output dari IC L293D. Rancangan aktuator robot pembuang sampah otomatis dapat dilihat pada gambar 3.6 berikut.
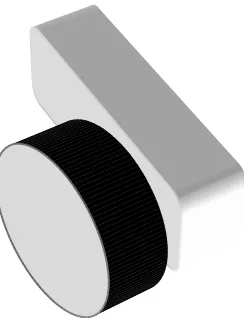
Gambar 3.6 Rancangan Aktuator Robot
3.2.5. Perancangan Tong Sampah Robot
Aktuator adalah komponen yang berfungsi untuk melakukan gerakan mekanis berdasarkan input perintah dari mikrokontroler (processor). Robot pembuang sampah otomatis ini memiliki 1 komponen mekanis yaitu roda (wheel).
Roda adalah aktuator yang akan digunakan oleh robot pembuang sampah otomatis untuk melakukan pergerakan didarat. untuk penggerak roda digunakan motor DC dan
gearbox untuk meningkatkan torsi motor. Motor DC yang digunakan akan dikontrol
Gambar 3.7 Rancangan Tong Sampah Robot
3.2.6. Perancangan Sirkuit Elaktronik
Perancangan sirkuit elektronik berhubungan dengan perancangan rangkaian power supply, mikrokontroler ATMega8, driver motor, dan motor DC. Semua rangkaian tersebut disatukan pada sebuah pada papan sirkuit utama (main circuit)
3.2.6.1Perancangan Rangkain Sumber Tegangan
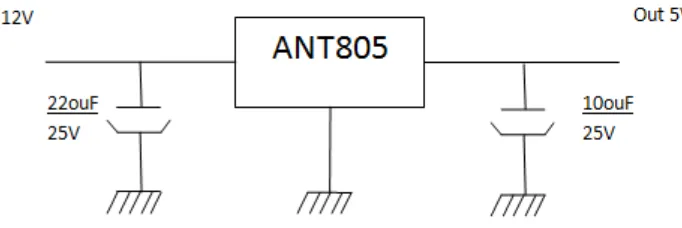
Agar sistem dapat bekerja dengan baik dibutuhkan sumber tegangan (power supply). Ada tiga jenis sumber tegangan yang dibutuhkan pada system ini yaitu sumber tegangan untuk sirkuit, sumber tegangan untuk actuator, dan sumber tegangan untuk lengan pengangkat. Sirkuit utama mebutuhkan tegangan agar dapat beroperasi dengan stabil yaitu 5V. Sedangkan aktuator membutuhkan tegangan 9V – 12V.
baterai (tunggal atau gabungan beberapa baterai) yang menghasilkan tegangan keluaran 9V – 12V. Untuk memperoleh tegangan 5V dari sumber tegangan 6V – 12V dapat digunakan IC regulator ANT805, IC regulator ini berfungsi untuk menghasilkan tegangan keluaran sebesar 5V. Berikut adalah gambar rangkaian sumber tegangan untuk sirkuit utama (Gambar 3.8).
Gambar 3.8 Perancangan Rangkaian regulator IC ANT805
3.2.6.2 Perancangan Rangkain Mikrokontroler ATMega 8
Mikrokontroler digunakan sebagai pengendali utama robot pembuang sampah . Mikrokontroler akan memproses input dari perangkat kontrol dan mengontrol semua aktivitas robot seperti pergerakan, sensing, dan komunikasi dengan perangkat kontrol. Rangkaian dasar yang digunakan untuk mengoperasikan sebuah mikrokontroler disebut sebagai rangkaian sistem minimum. Rangkaian sistem minimum terdiri dari rangakaian osilator, rangkaian sistem reset, dan sumber tegangan.
Rangkaian osilator (clock) berfungsi memberikan sinyal clock untuk mikrokontroler dengan frekuensi tertentu agar mikrokontroler yang digunakan pada sistem dapat bekerja dengan baik. Rangkaian clock ini menghasilkan sinyal high atau low dengan periode yang sama dan konstan. Pada gambar 3.9 ditunjukkan bentuk sinyal clock dalam satuan waktu mikro detik.
12 MHZ dan dua buah kapasitor keramik dengan kapasitas 22 pF. Keluaran dari osilator ini dihubungkan ke mikrokontroler pin 12 (XTAL2) dan pin 13 (XTAL1).
Sistem reset pada mikrokontroler berada pada pin 9. Sistem Mikrokontroler akan melakukan reset apabila pin 9 menerima satu siklus sinyal (1 dan 0). Jika sistem
reset berjalan dengan baik, maka mikrokontroler akan kembali menjalankan program
dari awal. Pada gambar 3.10 berikut dapat dilihat sistem minimum mikrokontroler ATMega8.
Tabel 3.5 Rincian Komponen pada board
No Nama Barang Banyak Fungsi
1 Mikrokontroler
(ATMega8) 1 Processor Utama
2 Sensor Ping 1 Pengukur Jarak
Gambar 3.10 Perancangan Mikrokontroler ATMega8
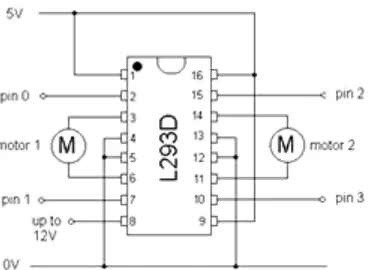
3.2.6.3 Perancangan Rangkain Driver Motor DC
Untuk mengendalikan perputaran motor DC digunakan IC L293D. IC ini akan menerima input dari mikrokontroler ATMega8 dan menghasilkan output yang bersesuaian. L293D mampu men-drive dua motor DC sekaligus. Untuk mengaktifkan IC L293D membutuhkan dua sumber tegangan yaitu sumber tegangan 5 V untuk
enable chip dan input-an (logic power supply) serta sumber tegangan yang kedua
Gambar 3.11 Perancangan Rangkaian Driver Motor DC IC L293D
3.2.7 Perancangan Program Mikrokontroler
Gambar 3.12 Flowchart Robot Logika Fuzzy
3.2.8 Perancangan Flowchart sistem
mengucapkan terima kasih. Tetapi jika logika 1 pada sensor inframerah berlangsung lama atau lebih dari 1 detik maka robot akan menganggap sampah telah penuh sehingga akan menggerakkan motor untuk menuju lokasi pembuangan kemudian kembali ke posisi semula.
Gambar 3.13 Blok Diagram Robot Pembuang Sampah Otomatis
3.2.9 Perancangan Blok Diagram
BAB 4
IMPLEMENTASI DAN PENGUJIAN SISTEM
4.1. Implementasi Sistem
Setelah dilakukan analisis dan perancangan pada bab sebelumnya, proses yang akan dilakukan berikutnya adalah implementasi sistem sesuai dengan perancangan yang telah dibuat. Perangkat elektronika dapat dilakukan dengan dua cara yaitu menggunakan papan protoboard atau menggunakan PCB. Printed Circuit Board (PCB) digunakan untuk mendapatkan rangkaian elektronika yang stabil, dengan menggunakan PCB pada sistem ini diharapkan perangkat tidak menimbulkan bug ke dalam sistem dan mempermudah pengerjaan dalam merangkai. Untuk itu pada implementasi dari sistem ini digunakan PCB.
Kerangka robot pembuang sampah diimplementasikan menggunakan bahan plastik keras (acrilyc) dengan ketebalan lebih kurang 5 mm. Alasan utama penggunaan acrilyc adalah karena bahan yang cukup kuat , relatif ringan , mudah dalam pengerjaannnya serta mudah didapat. Secara keseluruhan bahan yang digunakan untuk membuat kerangka robot adalah acrilyc 5 mm, sudut acrilyc berukuran 35 mm, baut dengan diameter 3 mm.Perangkat lunak diimplementasikan dengan bahasa pemrogramman c (CodeVisionAVR).
4.1.1. Implementasi Kontruksi Utama
lebih 40 cm. Berikut gambar tahap implementasi kerangka robot (a) kerangka bagian samping (b) kerangka bagian bawah(c) kerangka bagian atas (gambar 4.1).
(a) (b)
4.1.2. Implementasi Konstruksi Akuator
Robot pembuang sampah menggunakan dua motor DC sebagai aktuator yang digunakan sebagai penggerak robot. Aktuator ini diimplementasikan menggunakan motor gear box dan wheel. Motor yang digunakan dapat bekerja antara 6 – 12 volt. Untuk wheel memiliki diameter 7 cm dan depth 3.25 cm, dapat dilihat pada gambar 4.2.
(a) aktuator pada bagian belakang robot.
wheel aktuator
Rangkaian sirkuit elektronik diimplementasikan dengan menggunakan papan PCB. PCB merupakan sebuah papan tipis yang di salah satu atau kedua sisinya terdapat jalur yang sudah tercetak dari lapisan tembaga. PCB berfungsi untuk meletakan komponen elektronika. PCB yang masih dalam keadaan polos atau belum terdapat jalur-jalur tembaga sebenarnya lebih tepat kalau disebut sebagai CCB (Cooper Clad Board). Jenis CCB sendiri ada banyak macamnya namun yang paling mudah dijumpai di toko-toko komponen eketronika adalah “PCB polos” dan “PCB lubang-lubang”. Penggunaan papan PCB dapat meminimalisir noise dan lebih stabil dibandingkan dengan penggunaan protoboard, disamping itu juga peletakan komponen elektronik pada papan PCB lebih kuat dibandingkan diletakkan pada protoboard.
Gambar 4.3 Implementasi Rangkaian Sirkuit Elektronik
4.1.4. Implementasi Mikrokontroler (main board)
(a) (b)
Gambar 4.4 Implementasi Rangkaian Mikrokontroler pada PCB (a) Layout Mikrokontroler pada ARES
(b) Implementasi Menggunakan PCB
4.1.5. Implementasi Driver Motor DC
IC L293D memiliki rangkaian dasar untuk beroperasi (sistem minimum) juga diimplementasikan dalam PCB yang disebut boarddriver motor DC. Board driver ini nantinya akan menerima masukan dari mikrokontroler dan memberikan respon terhadap motor DC.Layout driver motor dapat dilihat pada gambar 4.5.
dijelaskan sebagai berikut:
1. Layout PCB dari rangkaian sirkuit elektronik. Layout pada PCB dibuat dengan
menggunakan ISIS Proteus 7.7 Pro dan ARES. Setelah membuat schematic rangkaian, tahap selanjut adalah membuat layout PCB dengan menggunakan ARES. Berikut gambar layout PCB (gambar 4.4.a).
2. Pencetakan, selanjutnya kita mencetak layout di kertas foto tipis (200 mg) untuk proses penyablonan.
3. Penyablonan, layout PCB yang sudah diprint sebelumnya, akan disablon ke papan PCB. Caranya adalah, pertama-tama papan PCB diamplas terlebih dahulu, kemudian dipanaskan dengan setrika, lalu letakkan cetakan layout tersebut ke papan PCB, kemudian diratakan dengan setrika listrik hingga
layout tersebut menempel pada papan PCB (gambar 4.6).
(a) (b)
Gambar 4.6 Proses Penyablonan Layout pada PCB (a) alat dan bahan (b) Hasil Penyablonan
(a) (b)
Gambar 4.7 Pelarutan PCB (a) PCB dan Larutan FeCl3 (b)Hasil pelarutan papan PCB
5. Pengeboran, pada tahap ini PCB yang telah dilarutkan akan dilubangi menggunakan bor dengan mata bor 0.8 mm – 1 mm. Tempat yang akan dilubangi telah tersedia pada layout PCB tersebut. Tujuan dari melubangi PCB untuk menyediakan tempat penyolderan antara komponen dengan papan PCB. Dapat dilihat pada gambar 4.8.
Gambar 4.8 Pengeboran pada PCB
Gambar 4.9 PemasanganKomponen pada PCB
7. Pengecekan dan pengujian, pada tahap ini setiap rangkaian dan komponen akan dicek serta diuji koneksinya. Pengujian ini menggunakan alat tambahan yaitu multimeter digital. Dapat dilihat pada gambar berikut (gambar 4.10).
4.2.Implementasi Perangkat Lunak
4.2.1. Implementasi Modul Program Mikrokontroler
Modul program mikrokontroler dibuat menggunakan bahasa pemprograman c dengan CodeVisionAVR (CVAVR) sebagai compiler. Program *.c dikompilasi menjadi file *.hex yang kemudian di-download ke dalam mikrokontroler melalui downloader (ProgISP). Berikut gambar pembuatan program dengan CVAVR (gambar 4.11).
Gambar 4.11 Proses pembuatan program Mikrokontroler Robot Pembuang Sampah
4.2.2.1. Rutin Program untuk Pembacaan Sensor
Rutin program ini berfungsi untuk membaca sensor dan memberikan nilai kepada mikrokontroler.
{PORTD.4=0;PORTD.5=0;delay_ms(5000);PORTD.4=1;PORTD.5=1; goto x; }
if(t==2){Read_FSensor();if(FRONT < 300){Read_FSensor();} t=0;} }
4.3. Pengujian Sistem
Pengujian sistem dilakukan untuk mengetahui bahwa sistem yang telah dibangun dapat berjalan dengan baik. Misalnya penekanan tombol pada button di smartphone dapat terdeteksi sebagai input oleh mikrokontroler dan berjalan baik dalam pergerakan robot. Pengujian yang dilakukan pada sistem ini adalah pengujian input robot, pengujian aktuator robot, pengujian pergerakan robot, pengujian penuangan sampah pada robot, dan pengujian sensor.
4.3.1 Pengujian Aktuator Robot
Pengujian aktuator robot menyangkut pada bagian penggerak motor dengan modul program. Pengujian ini dilakukan untuk melihat apakah pergerakan robot sesuai dengan modul program yang dibuat. Sebagai contoh jika modul program memanggil rutin program ‘maju()’, maka robot akan berjalan maju, dan menandakan tahap pengujian ini sudah berfungsi dengan baik.
4.3.2 Pengujian Sensor Ultrasonik
tegangan standart dari sensor ultrsonik tersebut.
4.3.3 Pengujian Sensor Proximity
Pengujian sensor proximity menyangkut pada bagian sensor yang berfungsi untuk membaca sampah yang dimasukkan ke tong sampah apakah tong sampah sudah penuh atau belum. Pengujian ini dilakukan untuk nilai awal jika sensor mendeteksi logika ‘1’ dalam waktu yang singkat dan kembali ke ‘0’ maka program akan mengaktifkan pesan suara yang mengucapkan terima kasih. Tetapi jika logika ‘1’ pada sensor infra merah berlangsung lama atau lebih dari 1 detik maka robot akan menganggap sampah telah penuh sehingga akan menggerakkan motor, ini menandakan pengujian terhadap sensor sudah berjalan dengan baik.
4.3.4 Pengujian Pergerakan Robot
Pengujian ini termasuk pengujian tahap akhir, dimana robot akan bergerak sesuai dengan hasil dari pembacaan sensor yang telah difuzzikasikan kedalam fungsi keanggotan oleh mikrokontroler ATMega8.
4.3.5 Pengujian Pergerakan Robot Jalan Lurus
Gambar 4.12 Pengujian Pergerakan Robot Jalan Lurus
4.3.6 Pengujian Pergerakan Robot Belok kanan
Gambar 4.13 Pengujian Pergerakan Robot Belok Kanan
4.3.7 Pengujian Pergerakan Robot Belok kiri
Pada pengujian ini motor servo akan diberikan nilai sesuai dengan himpunan nilai yang ada pada program. Jika robot bergerak belok kiri sesuai dengan nilai yang diberikan pada program maka pengujian ini berjalan dengan baik, dapat dilihat di gambar 4.14
4.3.8 Pengujian Pergerakan Robot Penuangan Sampah
Pada pengujian aktuator robot ini menyangkut pada bagian penggerak motor dengan modul program, pengujian ini dilakukan untuk melihat apakah pergerakan robot sesuai dengan modul program yang dibuat, dapat kita lihat pada gambar 4.15 dimana robot sedang menuangkan sampah sehingga dapat kita lihat motor penggerak sudah dapat berfungsi dengan baik untuk menuangkan sampah.
Gambar 4.15 Pengujian Pergerakan Robot Penuangan Sampah
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan hasil dari implementasi dan pengujian perancangan robot pembuang sampah dengan mikrokontroler ATMega8 untuk membuang sampah maka penulis mengambil kesimpulan sebagai berikut:
1. Robot bergerak dari satu titik ke titik yang lain menggunakan 2 metode yaitu berdasarkan perhitungan putaran roda dan deteksi dinding oleh sensor ultrasonik. 2. Kombinasi 2 metode diatas membuat robot bergerak lebih akurat dan kesalahan
lebih kecil dibandingkan jika hanya menggunakan salah satu dari metode tersebut. 3. Kesalahan awal dari gerak atau posisi robot akan mempengaruhi gerak selanjutnya
karena efek dari metode perhitungan putaran roda. Misalnya gerak awal memiliki kesalahan sudut putar 10 derajat maka akan mempengaruhi sudut putar berikutnya dan berpotensi makin besar tingkat kesalahannya.
5.2 Saran
1. Pengisian daya baterai masih dilakukan dalam keadaan manual, yaitu dengan cara di isi melalui charger. Dapat dilakukan pengembangan dengan mengisi daya melalui jaringan wifi.
2. Pengembangan sistem gerak dan sistem kontrol untuk mengecilkan faktor error. 3. Pengunaan kompas digital atas gps agar orientasi dan letak geografis robot dapat
BAB 2
LANDASAN TEORI
2. Robotika
2.1.1. Sejarah Robot
Sejarah Perkembangan Robot Michael A.G dan Alan C.S dalam jurnal Human-Robot Interaction (HRI), 2007 Kata istilah robot berasal dari bahasa Ceko (Chech) robota, yang memiliki arti pekerja (worker) yang dapat diartikan sebagai pekerja yang tidak mengenal lelah.Istilah tersebut dikenalkan oleh penulis bernama Karl Capek pada tahun 1920 yang di pertunjukan dalam pentas komedi yang berjudul RUR (Rossum’s Universal Robot), yang bercerita tentang mesin yang menyerupai manusia tapi mampu bekerja terus menerus tanpa lelah. (widodo,2012)
Pengertian perilaku seperti robot dan implikasinya terhadap manusia telah sudah ada selama berabad-abad :
a. Pada abad ke 3 dekripsinya tentang automata terdapat dalam naskah Taoisme kuno Cina, Liezi. Banyak yang menduga penulis nakah naskah ini adalah Lie Yukou, seorang filsuf Cina, salah satu bagian buku tersebut menceritakan pertemuan antara Raja MU danri Disnati Zou (1023-957 SM) dan seseorang insinyur mekanik. Yang dikenal sebagai Yan Shi. Dengan bangga Yan Shi menunjukan hasil karyanya berupa manusia mekanis kepada raja.
b. Pada 1945, Leornado da vinci menuangkan ide-idenya tentang robot, leornado da vinci sendiri merupakan seorang penemu, arsitek, seniman, pematung, penulis, dan pelukis Renaisans dari italia dia banyak mendesain ciptaan berteknologi modern, tetapi jarang diwujudkansemasa hidupnya, kebanyakan ide-idenya dituangkan dalam bentuk gamar-gambar. Dia pernah mendesain aoutomata humanoid yang terlihat seperti ksatria bersenjata, kemudian dikenal sebagai robot leoanardo.
c. Jacqes de Vaucanson (1709- 1782). Dia merupkan penemu dan seniman asal prancis yang menciptakan robot dan mesin-mesin yang mengensankan dan inovatif.
memamerkan robot humanoid yang dibangun bertahun-tahun lamanya, yang diberi nama ASIMO, yang kemudian disusul oleh Sony dengan robot anjing AIBO-nya. (Budiharto, 2011)
2.1.2. Karakteristik Robot
Sebuah robot secara umum memiliki karakteristik sebagai berikut :
1. Sensing,yaitu robot harus dapat mendeteksi lingkungan sekitarnya (halangan,
panas, suara, dan image).
2. Mampu bergerak, yaitu robot umumnya bergerak dengan menggunakan kaki maupun roda dan pada beberapa kasus robot lainnya diharapkan dapat terbang atau berenang.
3. Cerdas, yaitu robot memiliki kecerdasan bantuan agar dapat memutuskan aksi yang tepat dan akurat.
4. Membutuhkan energi yang memadai, yaitu robot membutuhkan catu daya yang memadai agar unit pengontrol dan aktuator dapat menjalankan fungsinya dengan baik.
2.1.3. Tipe Robot
Robot didesain dan dibuat sesuai kebutuhan pengguna.Hingga saat ini secara umum robot terbagi menjadi:
1. Robot manipulator
2. Robot Mobil (mobile robot) a. Robot daratan (ground robot)
1. Robot beroda 2. Robot berkaki
b. Robot air (submarine robot) c. Robot terbang (aerial robot)
2.2. Algoritma Fuzzy
2.2.1. Logika Fuzzy
dapat bernilai besar atau salah secara bersamaan.Logika fuzzy memiliki derajat keanggotaan dalam rentang nilai 0 (nol) hingga 1(satu). Berbeda dengan logika digital atau diskrit yang hanya memiliki dua nilai yaitu 1(satu) atau 0 (nol).Logika fuzzy digunakan untuk menerjemahkan suatu besaran yang diekspresikan menggunakan bahasa(Linguistic). (Budiharto & Suhartono. 2014)
Logika Fuzzy merupakan sesuatu logikayang memiliki nilai kekaburan atau kesamaran (fuzzyness) antara benar atau salah. Dalam teori logika fuzzy suatu nilai bias bernilai benar atau salah secara bersama. Namun berapa besar keberadaan dan kesalahan suatu tergantung pada bobot keanggotaan yang dimilikinya.Logika fuzzy memiliki derajat keanggotaan dalam rentang 0 hingga 1.Berbeda dengan logika digital yang hanya memiliki dua nilai 1 atau 0.Logika fuzzy digunakan untuk menterjemahkan suatu besaran yang diekspresikan menggunakan bahasa (linguistic), misalkan besaran kecepatan laju kendaraan yang diekspresikan dengan pelan, agak cepat, cepat, dan sangat cepat.Logika fuzzy menunjukan sejauh mana suatu nilai itu benar dan sejauh mana suatu nilai itu salah. Tidak seperti logika klasik (scrisp)/ tegas, suatu nilai hanya mempunyai 2 kemungkinan yaitu merupakan suatu anggota himpunan atau tidak. Derajat keanggotaan 0 (nol) artinya nilai bukan merupakan anggota himpunan dan 1 (satu) berarti nilai tersebut adalah anggota himpunan.
Logika fuzzy adalah suatu cara yang tepat untuk memetakan suatu ruang input kedalam suatu ruang output, mempunyai nilai kontinyu. Fuzzy dinyatakan dalam derajat dari suatu keanggotaan dan derajat dari kebenaran. Oleh sebab itu sesuatu dapat dikatakan sebagian benar dan sebagian salah pada waktu yang sama.(Kusumadewi &Purnomo. 2013).
2.3. Perangkat Keras
2.3.1. Mikrokontroler
Mikrokontroller merupakan alat pengolahan data digital dan analog (fitur ADC pada seri AVR) dalam level tegangan maksimum 5V. Keunggulan mikrokontroller dibanding microprocessor yaitu lebih murah dan didukung dengan software compiler yang sangat beragam seperti software compailer C/C++, basic,pascal, bahkan assembler. Sehingga penggunaan dapat memilih program yang sesuai dengan kemampuannya. Dalam hal penggunaan, mikrokontroller dapat dibedakan jenis dan tipenya, seperti mikrokontroller atmega 8, atmega 8535, atmega 16 dan lain-
lain.
Gambar 2.1. Arsitektur ATMega8
untuk kemasan yang lain ( TQPF, QFN / MLF ) tidak jauh berbeda. Untuk lebih jelasnya silahkan merujuk ke data sheet. Nama nama pin di atas usahakan lebih sering dikenal, hal ini berguna untuk penggunaan pheripheral internal.
2.3.3. Fitur ATMega 8
Berikut ini adalah fitur-fitur yang dimiliki oleh ATMega8 : A. Saluran I/O sebanyak 23 buah terbagi menjadi 3 port.
B. ADC sebanyak 6 saluran dengan 4 saluran 10 bit dan 2 saluran 8 bit. C. Tiga buah timer counter, dua diantaranya memiliki fasilitas pembanding. D. CPU dengan 32 buah register
E. Watchdog timer dan oscillator internal. F. SRAM sebesar 1K byte.
G. Memori flash sebesar 8K Bytes system Self-programable Flash H. Unit interupsi internal dan eksternal.
I. Port antarmuka
J. EEPROM sebesar 512 byte.
K. Port USART ( Universal Syncronous and Asycronous Serial Receiver and Transmitter ) untuk komunikasi serial.
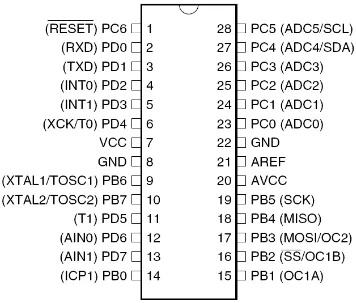
2.3.4. Konfigurasi Mikrokontroler ATMega8
Gambar 2.2 PIN Konfigurasi pada ATMega8
2.3.5. Deskripsi Pin-Pin Pada Mikrokontroler ATMega8
1. VCC
Merupakan supply tegangan untuk digital. 2. GND
Merupakan ground untuk smua komponen yang membutuhkan grounding. 3. Port B
4. Port C
Port C merupakan sebuah 7-bit bi-directional I/O yang di dalam masing-masing pin terdapat pull-up resistor. Jumlah pin-nya hanya 7 buah mulai dari C.0 sampai dengan pin C.6. Sebagai keluaran / output, port C memiliki karakteristik yang sama dalam hal kemampuan menyarap arus ( sink ) ataupun mengeluarkan arus ( source).
5. Reset / PC6
Jika RSTDISBL Fuse diprogram, maka PC6 akan berfungsi sebagai pin I/O. Untuk diperhatikan juga bahwa pin ini memiliki karakteristik yang berbeda dengan pin-pin yang tedapat pada port C. Namun jika RSTDISBL Fuse tidak diprogram, maka pin ini akan berfungsi sebagai input reset. Dan jika level tegangan yang masuk ke pin ini rendah dan pulsa yang ada lebih pendek dari pulsa minimum, makan akan menghasilkan suatu kondisi reset meskipun clock-nya tidak berkerja.
6. Port D
Port D merupakan 8-bit bi-directional I/O dengan internal pull-up resistor. Fungsi dari port ini sama dengan port-port yang lain. Hanya saja pada port ini tidak terdapat kegunaan-kegunaan yang lain. Pada port ini hanya berfungsi sebagai masukan dan keluaran saja atau biasa disebut dengan I/O.
7. AVCC
Pada pin ini memiliki fungsi sebagai power supply tegangan untuk ADC. Untuk pin ini harus dihubungkan secara terpisah dengan VCC karena pin ini digunakan untuk analog saja. Bahkan jika ACD pada AVR tidak digunakan, tetap saja disarankan untuk menghubungkan secara terpisah dengan VCC. Cara menghubungkan AVCC adalah melewati low-pass filter setelah itu dihubungkan dengan VCC.
8. AREF
singkat. Register ini tidak secara otomatis tersimpan ketika memasuki sebuah rutin interupsi dan juga ketika menjalankan sebuah perintah setelah kembali dari interupsi. Namun hal iini harus dilakukan melalui software.
9. Bit 7 (1)
Merupakan bit Global Interrupt Enable. Bit ini harus di-set supaya semua perintah interupsi dapat dijalankan. Untuk fungsi interupsi individual akan dijelaskan pada bagian yang lain. Jika bit ini di-reset, maka semua perintah interupsi baik yang secara individual maupun yang secara umum akan diabaikan. Bit ini akan dibersihkan atau cleared oleh hardware setelah sebuah interupsi dijalankan dan akan di-set kembali oleh perintah RETI. Bit ini juga dapat di-set dan di-reset melalui aplikasi dengan instruksi SEI dan CLI.
10. Bit 6 (T)
Merupakan bit Copy Storage. Instruksi bit Copy Instruction BLD ( Bit LoaD ) dan BST ( Bit Store ) menggunakan bit ini sebagai asal atau tujuan untuk bit yang telah dioperasikan. Sebuah bit dari sebuah register dan Register File dapat disalin ke dalam bit ini dengan menggunakan intruksi BST, dan sebuah bit di dalam bit ini dapat disalin ke dalam sebuah bit di register pada Register File dengan menggunakan perintah BLD.
11. Bit 5 (H)
Merupakan bit Half Carry Flag. Bit ini menandakan sebuah Half Carry dalam beberapa operasi aritmatika. Bit ini berfungsi dalam aritmatik BCD.
12. Bit 4 (S)
Merupakan Sign bit. Bit ini selalu merupakan sebuah eksklusif di antara Negative Flag (N) dan Two’s Complement Overflow Flag (V).
13. Bit 3 (V)
Merupakan bit Two’s Complement Overflow Flag. Bit ini menyediakan fungsi aritmatika dua komplemen.
14. Bit 2 (N)
16. Bit 0 (C)
Meruapakan bit Carry Flag. Bit ini mengindikasikan sebuah Carry atau sisa dalam sebuah fugnsi aritmatika atau logika. (Nababan,2015)
2.4. Sensor
2.4.1. Sensor Inframerah
Infra merah merupakan piranti yang sangat umum digunakan dalam suatu sistem instrumentasi. Infra merah dapat didefinisikan sebagai alat pemberi sinyal pada sensor. Sistem sensor infra merah pada dasarnya menggunakan infra merah sebagai media untuk komunikasi data antara receiver dan transmitter. Sistem akan bekerja jika sinar infra merah yang dipancarkan terhalang oleh suatu benda yang mengakibatkan sinar infra merah tersebut tidak dapat terdeteksi oleh penerima. Infra merah yang digunakan dalam sistem instrumentasi pengukuran kecepatan benda yang bergerak berupa cahaya yang memiliki panjang gelombang dan radiasi yang tajam. Adapun pemancar atau penembak cahaya yang dapat digunakan, seperti Infra red dan dioda laser. Infra merah prinsip kerjanya sama seperti LED biasa. Perbedaannya cahaya yang dipancarkan pada Infra red LED berupa cahaya tak tampak. Infra red LED memiliki panjang gelombang sebesar 750-1000nM dan arus maksimal sebesar 100mA. Kelemahan dari Infra red ini adalah daya jelajah yang tidak jauh hanya sekitar 7-8 meter dengan sudut radiasi sebesar 450 . (Taufic, 2009)
2.4.2. Sensor Ultrasonik
Gambar 2.3 : HC-SR04 Sinyal Kontrol
2.5. Aktuator
Aktuator adalah bagian yang berfungsi sebagai penggerak dari perintah yang diberikan oleh input. Aktuator biasanya merupakan peranti elektromekanik yang menghasilkan gaya gerakan. Aktuator terdiri dari 2 jenis, yaitu:
1. Aktutor elektrik
2. Aktuator pneumatik dan hidrolik
Pada penelitian ini aktuator yang akan digunakan adalah aktuator elektrik yang berupa motor DC yang akan dijelaskan sebagai berikut :
2.5.1. Motor DC
Motor DC adalah suatu mesin yang berfungsi untuk mengubah energi listik arus searah menjadi energi gerak atau energi mekanik. Motor yang paling sederhana untuk pengaktifannya.Motor DC terdiri dari dua bagian utama, yaitu rotor dan stator.Rotor adalah bagian yang berputar atau armature, berupa koil dimana arus listrik dapat mengalir. Stator adalah bagian yang tetap dan menghasilkan medan magnet dari koilnya. (Susilo,2010)
gaya Lorentz, dimana gaya yang jatuh pada telapak tangan (F), jari yang direntangkan menunjukan arah medan magnet (B), ibu jari menunjukkan arah arus listrik(I).
Gambar 2.4. prinsp gaya Lorenz (Sumber:
Berdasarkan pada prinsip gaya Lorentz, jika diberikan tegangan pada DC motor maka gaya tersebut akan membuat motor berputar secara kontinu ke arah tertentu. Membalikkan arah putaran motor dapat dilakukan dengan mengubah polaritas arus yang mengalir pada motor Gambar dibawah memperlihatkan arah perputaran motor DC berdasarkan polaritas arus yang mengalir.
Gambar 2.5. Arah perputaran motor DC
(Sumber:
Motor DC biasanya mempunyai kecepatan putar yang cukup tinggi dan sangat cocok digunakan untuk roda robot yang membutuhkan kecepatan gerak yang tinggi.
kualifikasi khusus yang sesuai dengan aplikasi “servoing” di dalam teknik kontrol. Dalam kamus Oxford istilah “servo” diartikan sebagai “a mechanism that controls a
larger mechanism”. Motor servo merupakan motor DC yang mempunyai kualitas
tinggi, sudah dilengkapi dengan sistim kontrol di dalamnya. Dalam aplikasi motor servo sering digunakan sebagai kontrol loop tertutup untuk menangani perubahan posisi secara tepat dan akurat. Begitu juga dengan pengaturan kecepatan dan percepatan.
Gambar 2.6 Model Fisik dan Pin-Pin Motor servo
Bentuk fisik dari motor servo dapat dilihat pada gambar 2.5 diatas. Sistem pengkabelan motor servo terdiri dari 3 bagian, yaitu Vcc, Gnd, dan kontrol (PWM). Penggunaan PWM pada motor servo berbeda dengan penggunaan PWM pada motor DC. Pada motor servo, pemberian nilai PWM akan membuat motor servo bergerak pada posisi tertentu dan kemudian berhenti (kontrol posisi). Pengaturannya dapat dilakukan dengan menggunakan delay pada setiap perpindahan dari posisi awal menuju posisi akhir.
Mode pensinyalan motor servo tampak pada gambar 2.6.
Gambar 2.7 Mode Pensinyalan motor servo
Contoh dimana bila diberikan pulsa dengan besar 1.5ms mencapai gerakan 90 derajat, maka bila kita berikan data kurang dari 1.5 ms maka posisi mendekati 0 derajat dan bila kita berikan data lebih dari 1.5 ms maka posisi mendekati 180 derajat.
Contoh Posisi dan Waktu Pemberian Pulsa tampak pada gambar 2.7.
Gambar 2.7 Contoh Posisi dan Waktu Pemberian Pulsa
1. Tinjauan Penelitian
Beberapa contoh penelitian ATMega8 sebagai berikut :
1. Nababan, Alpredo (2015). Membuat penelitian yang berjudul Perancangan Alat Pengukur Jarak Menggunakan Software Basic Complier-AVR Berbasis Mikrokontroller ATMega8. Implementasi dari penelitian ini adalah merancang dan mengimplementasikan dengan menggunakan mikrokontroler ATMega8 dan sensor infra merah. Basis pengetahuan robot berisi pengkodean aksi yang harus dilakukan oleh robot berdasarkan informasi dari sensor.
2. Nuriana (2009). Membuat penelitian yang berjudul Rancang Bangun Robot Beroda Penghindar Halangan.Implementasi dari penelitian ini menggunakan sensor ultrsonik dan mikrokontroler AT89S51 yang akan dirancang untuk bergerak menghindar jika terdapat ada halangan yang berada di depan, kiri dan kanannya. 3. Kurniadi (2007). Membuat penelitian yang berjudul Perancangan Penghindar
Dinding Dengan Menggunakan Sensor Infra Merah Berbasis Mikrokontroler
AT89S51. Implementasi penelitian ini menggunakan infra merah dan
PENDAHULUAN
1.1 Latar Belakang
Kemajuan teknologi semakin berkembang sangat pesat pada kehidupan manusia diera modernini, khususnya pada bidang elektronika. Hal ini ditandai dengan adanya berbagai peralatan yang diciptakan dan dapat dioperasikan serta digunakan secara otomatis. Disebabkan oleh kemajuan teknologi inilah maka berkembang suatu ilmu yang merupakan suatu pecahan dari ilmu elektronika yaitu bidang ilmu robotika.
Dalam kehidupan manusia sampah telah menjadi sumber masalah. Masalah yang ditimbulkan adalah penyakit,banjir,dan bau yang tidak sedap di sekitar tempat pembuangan sampah. Sampah banyak jenisnya, salah satu sampah yang sering kita lihat adalah sampah konsumsi yang merupakan sampah yang dihasilkan oleh manusia pengguna barang, dengan kata lain adalah sampah-sampah yang dibuang ke tempat sampah. ini adalah sampah yang umum dan perlu untuk dipikirkan manusia, dalam hal ini adalah harus ada solusinya.
Kesadaran untuk membuang sampah pada tempatnya hingga kini belum sepenuhnya ditaati oleh sebagian orang padahal tong-tong sampah sudah disediakan. Ditambah lagi sampah yang kadang dibuang di sembarang tempat. Bisa jadi kurangnya tenaga kebersihan inilah yang juga menyebabkan tong sampah kadang ditemukan dalam keadaan sudah penuh sehingga sampah sisa makanan dan sebagainya diletakkan begitu saja.
Maka salah satu cara yang dapat dilakukan untuk mengatasi permasalahan tersebut yaitu dengan memanfaatkan bak sampah otomatis yang memakai sistem aplikasi robot sebagai pengerak bak sampah tersebut, dalam hal ini bak sampah otomatis bisa berjalan dengan pengeraknya.
1.2 Rumusan Masalah
Berdasarkan uraian diatas, maka dapat diambil beberapa rumusan masalah sebagai berikut :
1. Bagaimana merancang sebuah sistem mekanisme gerak berupa robot mobile untuk tugas membuang sampah.
2. Bagaimana merancang rangkaian kontrol terprogram untuk menjalankan robot mobile menggunakan mikrokontroler ATMega8.
3. Bagaimana menulis algoritma sebuah program agar robot dapat berfungsi sesuai dengan tugasnya.
1.3 Batasan masalah
Dari latar belakang diatas, penulis membatasi masalah yang akan dibahas, yaitu: 1. Rancangan robot berbentuk sebuah tempat sampah yang akan bergerak
ketempat pembuangan jika telah penuh.
2. Robot bekerja secara otomatis mengantar sampah ketempat pembuangan akhir. 3. Robot diprogram dengan bahasa C pada mikrokontroler ATMega8.
1.4. Tujuan Peneliatian
1. Merancang sistem mekanisme berupa robot mobile berupa kotak pembuang sampah.
2. Merancang rangkaian kontrol menggunakan ic mokrokontroler untuk menjalankan mekanisme gerak robot.
3. Merancang alur program sebagai sistem penggerak otomatis agar robot berfungsi sesuai dengan tugasnya.
1. Merupakan sebuah inovasi dengan memanfaatkan kontrol terprogram yang dapat bekerja secara otomatis.
2. Menciptakan lingkungan yang bersih karena tempat pembuangan sampah selalu dapat digunakan.
3. Membantu tugas manusia dalam mengerjakan hal-hal sederhana misalnya pekerjaan pembuang sampah.
1.6 Metode Penelitian
Penelitian ini menerapkan beberapa metode penelitian sebagai berikut: 1. Studi Literatur
Pada tahap ini dilakukan pengumpulan referensi yang diperlukan dalam penelitian.Hal ini dilakukan untuk memperoleh informasi dan data yang diperlukan untuk penulisan skripsi ini.referensi yang digunakan dapat berupa buku, jurnal, artikel, situs internet yang berkaitan dengan penelitian ini.
2. Pengumpulan dan Analisa Data
Pada tahap ini dilakukan pengumpulan dan analisa data yang berhubungan dengan penelitian ini seperti datasheet dan cara kerja komponen yang digunakan serta data setiap jalur yang akan dijadikan lintasan yang ada di Universitas Sumatera Utara.
3. Perancangan Sistem
Merancang sistem sesuai dengan rencana yang telah ditentukan, yaitu meliputi perancangan desain robot, hardware, dan software. Proses perancangan ini berdasarkan pada batasan masalah dari penelitian ini.
4. Implementasi Sistem
5. Pengujian Sistem
Pada tahap ini akan dilakukan pengujian terhadap sistem yang telah dikembangkan.
6. Dokumentasi Sistem
Melakukan pembuatan dokumentasi sistem mulai dari tahap awal hingga pengujian sistem, untuk selanjutnya dibuat dalam bentuk laporan penelitian (skripsi).
1.7. Sistematika Penulisan
Penulisan ini terdiri dari lima bagian utama, dengan sistematika penyusunan sebagai berikut :
BAB 1 : PENDAHULUAN
Bab ini akan menjelaskan mengenai latar belakang masalah yang dibahas dalam skripsi ini, rumusan masalah, batasan masalah, tujuan penelitian, manfaat penelitian, metode penelitian, dan sistematika penulisan skripsi.
BAB II : LANDASAN TEORI
Bab ini merupakan tinjauan teoritis yang berkaitan dengan Robotika, Algoritma fuzzy, Mikrokontroler ATMega8, Aktuator robot (Motor DC, Driver motor DC L293D, Motor servo), dan lengan robot.
BAB III : ANALISIS DAN PERANCANGAN
Bab ini membahas mengenai tentang analisis dan perancangan sistem dalam prototipe Autonomous Robot Pembuang Sampah Otomatis Berbasis Mikrokontroler ATMega8. Model Unified Modelling Language (UML) yang digunakan antara lain use case
diagram, activity diagram, dan sequence diagram. Juga dibahas komponen yang
digunakan robot, perancangan konstruksi robot, dan aktuator.
BAB IV : IMPLEMENTASI DAN PENGUJIAN
BAB V : KESIMPULAN DAN SARAN
Pada bab ini menjelaskan mengenai hasil penelitian yang berisi kesimpulan dari penjelasan bab-bab sebelumnya dan saran dari hasil yang diperoleh untuk nantinya akan dikembangkan atau melanjutkan penelitian tentang robot pemindah barang yang telah dibuat guna untuk mendapatkan hasil robot yang lebih baik.
ABSTRAK
Robot adalah suatu hasil kreatifitas manusia yang dirancang untuk menggantikan beberapa tugas yang dinilai tidak harus dilakukan oleh manusia misalnya untuk tugas-tugas berbahaya, tugas-tugas rutin yang berulang-ulang dan sebagainya.
Pada kesempatan ini telah dirancang sebuah robot yang berfungsi untuk melayani proses pembuangan sampah. Robot bekerja berdasarkan kontrol otomatis yang dilakukan oleh sebuah kontroler AVR yaitu ATMega 8. Robot dilengkapi dengan akses suara untuk memberikan feedback jika seorang telah membuang sampah pada tempatnya. Robot akan otomatis bergerak ke lokasi pembuangan sampah jika tempat sampahnya telah penuh kemudian kembali ke posisi semula. Gerak robot dipandu oleh beberapa sensor ultrasonik dan perhitungan putaran roda. Penggerak robot adalah sepasang motor DC yang bekerja secara diferensial.
Hasilnya, setelah melalui beberapa tahap perancangan dan pengujian robot berhasil dibuat dan bekerja sesuai dengan fungsinya.Yaitu sebuah robot yang dapat berbicara mengucapkan terimakasih dan memiliki kemampuan untuk membuang sampah pada lokasi penumpukan sampah.
MICROCONTROLLER BASED ATMEGA8
ABSTRACT
Robot is a result of human creativity that is designed to replace some of the task that must not to be done by humans, for example, the dangerous task, routine task which are repetitive and etc.
On this occasion has designed a robot that has function to serve the trash disposal process. The robot works on the automatic control performed by a controller AVR is ATMega 8. The robot is equipped with voice access to provide feedback if a person has been disposing of trash in place. The robot will automatically move to localized landifills if the trash was full and the returned to its original position. Motion of robot guided by several ultrasonic sensors and the calculation of wheel rotation. The moving of robot is a pair of DC motor that work in differential.
As a result, after passing through several stages of design and testing of robot successfully created and works based on the function. Which is a robot can speak and say thank you and has ability to dispose the trash at the location of hoarding garbage.
AUTONOMOUS ROBOT PEMBUANG SAMPAH OTOMATIS BERBASIS MIKROKONTROLER ATMEGA 8
SKRIPSI
ANDRIO SAKTI SEBAYANG 111401121
PROGRAM STUDI S1 ILMU KOMPUTER
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI UNIVERSITAS SUMATERA UTARA
BERBASIS MIKROKONTROLLER ATMEGA 8 SKRIPSI
Diajukan untuk melengkapi tugas akhir dan memenuhi syarat mencapai gelar Sarjana Komputer
ANDRIO SAKTI SEBAYANG 111401121
PROGRAM STUDI S1 ILMU KOMPUTER
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : AUTONOMOUS ROBOT PEMBUANG SAMPAH
OTOMATIS BERBASIS MIKROKONTROLLER ATMEGA 8
Kategori : SKRIPSI
Nama : ANDRIO SAKTI SEBAYANG
Nomor Induk Mahasiswa : 111401121
Program Studi : SARJANA (S1) ILMU KOMPUTER
Fakultas : ILMU KOMPUTER DAN TEKNOLOGI
INFORMASI (FASILKOM-TI) Diluluskan di
Medan, Oktober 2016 Komisi Pembimbing :
Pembimbing 2 Pembimbing 1
Seniman,S.KOM.,M.KOM Dr. Poltak Sihombing, M.Kom NIP.198705252014041001 NIP. 196203171991021001
Diketahui/Disetujui oleh
Program Studi S1 Ilmu Komputer Ketua,
AUTONOMOUS ROBOT PEMBUANG SAMPAH OTOMATIS BERBASIS MIKROKONTROLER ATMEGA 8
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil karya saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Oktober 2016
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Kuasa atas segala berkat-Nya sehingga penulis dapat menyelesaikan skripsi ini, sebagai syarat untuk memperoleh gelar Sarjana Komputer, pada Program Studi S1 Ilmu Komputer Fakultas Ilmu Komputer dan Teknologi Informasi, Universitas Sumatera Utara.
Selama pengerjaan skripsi dengan judul, Autonomous Robot Pembuang Sampah Berbasis Mikrokontroler ATMega8, penulis menyadari bahwa banyak pihak yang turut membantu, baik dari pihak keluarga, sahabat dan orang-orang terkasih yang memotivasi dalam pengerjaannya. Dalam kesempatan ini, penulis mengucapkan terima kasih kepada:
1. Bapak Prof. Runtung Sitepu, SH, M. HUM selaku Rektor Universitas Sumatra Utara.
2. Bapak Prof. Dr. Opim Salim Sitompul sebagai Dekan Fakultas Ilmu Komputer dan Teknologi Informasi Universitas Sumatera Utara.
3. Bapak Dr. Poltak Sihombing, M.Kom sebagai Ketua Program Studi S1 Ilmu Komputer Fakultas Ilmu Komputer dan Teknologi Informasi Universitas Sumatera Utara dan sekaligus sebagai Dosen Pembimbing I.
4. Ibu Maya Silvi Lydia, BSc. MSc sebagai Sekretaris Program Studi S1 Ilmu Komputer Fakultas Ilmu Komputer dan Teknologi Informasi Universitas Sumatera Utara.
5. Bapak Seniman,S.Kom, M.Kom selaku dosen pembimbing II yang telah memberikan arahan dan motivasi kepada penulis dalam pengerjaan skripsi ini. 6. Bapak Syahril Efendi S.Si,M.IT dan Bapak Drs.Marihat Situmorang M.Kom
sebagai dosen penguji yang telah memberikan saran dan kritik kepada penulis dalam penyempurnaan skripsi ini.
7. Seluruh Dosen serta staf Pegawai di Program Studi S1 Ilmu Komputer Fakultas Ilmu Komputer dan Teknologi Informasi Universitas Sumatera Utara. 8. Bapak saya Bakat Sebayang, Ibu saya Elvina br Sembiring, Adik saya Indri
Jonatan, Samuel, Henry, Stephen, Farid, Ridho, Edi, Deka, Joshua, Johan, Mey, Simon yang telah memberi inspirasi dan semangat kepada penulis.
10. Semua pihak yang terlibat langsung ataupun tidak langsung yang tidak dapat penulis ucapkan satu per satu yang telah membantu penyelesaian skripsi ini. Semoga Tuhan Yang Maha Esa melimpahkan berkat dan karunia kepada semua pihak yang telah memberikan inspirasi, bantuan, perhatian, serta dukungan kepada penulis dalam menyelesaikan pengerjaan skripsi ini.
Penulis menyadari bahwa skripsi ini masih memiliki banyak kekurangan dan jauh dari kesempurnaan. Oleh karena itu, penulis mengharapkan kritik dan saran yang bersifat membangun untuk menyempurnakan skripsi ini. Sehingga dapat bermanfaat bagi kita semuanya..
Medan, Oktober 2016
ABSTRAK
Robot adalah suatu hasil kreatifitas manusia yang dirancang untuk menggantikan beberapa tugas yang dinilai tidak harus dilakukan oleh manusia misalnya untuk tugas-tugas berbahaya, tugas-tugas rutin yang berulang-ulang dan sebagainya.
Pada kesempatan ini telah dirancang sebuah robot yang berfungsi untuk melayani proses pembuangan sampah. Robot bekerja berdasarkan kontrol otomatis yang dilakukan oleh sebuah kontroler AVR yaitu ATMega 8. Robot dilengkapi dengan akses suara untuk memberikan feedback jika seorang telah membuang sampah pada tempatnya. Robot akan otomatis bergerak ke lokasi pembuangan sampah jika tempat sampahnya telah penuh kemudian kembali ke posisi semula. Gerak robot dipandu oleh beberapa sensor ultrasonik dan perhitungan putaran roda. Penggerak robot adalah sepasang motor DC yang bekerja secara diferensial.
Hasilnya, setelah melalui beberapa tahap perancangan dan pengujian robot berhasil dibuat dan bekerja sesuai dengan fungsinya.Yaitu sebuah robot yang dapat berbicara mengucapkan terimakasih dan memiliki kemampuan untuk membuang sampah pada lokasi penumpukan sampah.
MICROCONTROLLER BASED ATMEGA8
ABSTRACT
Robot is a result of human creativity that is designed to replace some of the task that must not to be done by humans, for example, the dangerous task, routine task which are repetitive and etc.
On this occasion has designed a robot that has function to serve the trash disposal process. The robot works on the automatic control performed by a controller AVR is ATMega 8. The robot is equipped with voice access to provide feedback if a person has been disposing of trash in place. The robot will automatically move to localized landifills if the trash was full and the returned to its original position. Motion of robot guided by several ultrasonic sensors and the calculation of wheel rotation. The moving of robot is a pair of DC motor that work in differential.
As a result, after passing through several stages of design and testing of robot successfully created and works based on the function. Which is a robot can speak and say thank you and has ability to dispose the trash at the location of hoarding garbage.
DAFTAR ISI 1.4 Tujuan Penelitian 2 1.5 Manfaat Penelitian 3 1.6 Metode Penelitian 3 1.7 Sistematika Penulisan 4 Bab 2 Tinjauan Pustaka 2.1 Robotika 6 2.1.1 Sejarah Robot 6 2.1.2 Karakteristik Robot 7 2.1.3 Tipe Robot 7
Bab 3 Analisis Dan Perancangan Sistem
3.1 Analisis Sistem 23
3.1.1 Analisis Masalah 23
3.1.2 Analisis Kebutuhan Sistem 24
3.1.3 Pemodelan Sistem 25
3.1.3.1 Use Case Diagram 25
3.1.3.2 Activity Diagram 26
3.1.3.3 Sequence Diagram 28
3.2 Perancangan Sistem 29
3.2.1 Komponen yang Digunakan Robot 29
3.2.2 Perancangan Konstruksi Robot Pembuang Sampah Otomatis 31
3.2.3 Perancangan Kerangka Robot 31
3.2.4 Perancangan Aktuator Robot 32
3.2.5 Perancangan Lengan Robot 33
3.2.6 Perancangan Sirkuit Elektronik 34
3.2.6.1 Perancangan Rangkaian Sumber Tegangan 34 3.2.6.2 Perancangan Rangkaian Mikrokontroler ATMega8 35
3.2.6.3 Perancangan Driver Motor DC 37
3.2.7 Perancangan Program Mikrokontroler 38
3.2.8 Perancangan Flowchart Sistem 39
3.2.9 Perancangan Diagram 40
Bab 4 Implementasi Dan Pengujian Sistem
4.1 Implementasi Sistem 41
4.1.1 Implementasi Konstruksi Utama 41
4.1.2 Implementasi Konstruksi Aktuator 43
4.1.3 Implementasi Rangkaian Sirkuit Elektronik 44 4.1.4 Implementasi Mikrokontroller (main board) 44 4.1.5 Implementasi Driver Motor DC 45
4.2 Implementasi Perangkat Lunak 49
4.2.1 Implementasi Modul Program Mikrokontroler 49 4.2.2.1 Rutin Program untuk Motor Stepper 52
4.3 Pengujian Sistem 51
4.3.1 Pengujian Aktuator Robot 51
4.3.2 Pengujian Sensor Ultrasonik 51
4.3.3 Pengujian Sensor Proximity 51
4.3.4 Pengujian Pergerakan Robot 52
DAFTAR TABEL
Halaman
Tabel 3.1 Dokumentasi Naratif Uses Case Sistem 26
Tabel 3.2 Tabel Peralatan Yang Digunakan 29
Tabel 3.3 Tabel Rincian Komponen Fisik 30
Tabel 3.4 Tabel Rincian Komponen Elektronik 30
DAFTAR LAMPIRAN
Hal.
A. Lampiran A A-1
DAFTAR GAMBAR
Halaman
Gambar 2.1 Arsitektur Mikrokontroler ATMega8 10
Gambar 2.2 Konfigurasi Pin ATMega8 12
Gambar 2.3 HC-SR04 Sinyal Kontrol 16
Gambar 2.4 Prinsip Gaya Lorenz 17
Gambar 2.5 Arah Perputaran Motor DC 18
Gambar 2.6 Model Fisik dan Pin-Pin Motor Servo 19
Gambar 2.7 Mode Pensinyalan Motor Servo 20
Gambar 2.8 Contoh Posisi dan Waktu Pemberian Pulsa 20 Gambar 3.1 Ishikawa Diagram Pada Robot Pembung Sampah Otomatis 24 Gambar 3.2 Use case diagram Prototipe Robot Pembuang Sampah Otomatis 26 Gambar 3.3 Activity Diagram prototipe Robot Pembuang Sampah Otomatis 27 Gambar 3.4 Sequence Diagram Prototipe Robot Pembuang Sampah dengan 28 Algoritma Fuzzy
Gambar 3.5 Rancangan Kerangka Robot 32
Gambar 3.6 Rancangan Aktuator Robot 33
Gambar 3.7 Rancangan Tong Sampah Robot 34
Gambar 3.8 Perancangan Rangkaian regulator IC ANT805 35
Gambar 3.9 Bentuk sinyal clock 36
Gambar 3.10 Perancangan Mikrokontroler ATMega8 37 Gambar 3.11 Perancangan Rangkaian Driver Motor DC IC L293D 38
Gambar 3.12 Flowchart Robot Logika Fuzzy 39
Gambar 3.13 Diagram Block Robot Pembuang Sampah Otomatis 40 Gambar 4.1 Implementasi kerangka robot Pembuang Sampah Otomatis 42 Gambar 4.2 Implementasi aktuator robot Pembuang Sampah Otomatis 43 Gambar 4.3 Implemenasi Rangkaian Sirkuit Elektronik 44 Gambar 4.4 Implementasi Rangkaian Mikrokontroler pada PCB 45 Gambar 4.5 Implementasi Driver Motor Menggunakan PCB 45
Gambar 4.8 Proses pengeboran pada PCB 47 Gambar 4.9 Proses Pemasangan komponen pada PCB 48
Gambar 4.10 Uji komponen pada PCB 48