PEMODELAN PEREDAM GETARAN PADA
TRAKTOR RODA DUA DENGAN JARINGAN
SYARAF TIRUAN
MOHD. ARSKADIUS ABDULLAH
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
PERNYATAAN MENGENAI TESIS DAN
SUMBER INFORMASI
Dengan ini saya menyatakan bahwa tesis Pemodelan Peredam Getaran pada Traktor Roda Dua adalah karya saya sendiri dan belum diajukan dalam bentuk apapun kepada Perguruan Tinggi manapun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka dibagian akhir Tesis ini.
Bogor, Juni 2007
ABSTRAK
MOHD. ARSKADIUS ABDULLAH. Pemodelan Peredam Getaran pada Traktor Roda Dua dengan Jaringan Syaraf Tiruan. Dibimbing oleh SAM HERODIAN,
M.FAIZ SYUAIB, dan SUROSO.
Mekanisasi pertanian sangat dibutuhkan dalam melaksanakan pembangunan pertanian baik di bidang perkebunan atau pertaniaan pangan. Salah satu bentuk implementasi mekanisasi pertanian adalah pemakaian traktor roda dua yang digerakkan oleh enjin yang berbahan bakar solar. Salah satu dampak penting terhadap operator dalam mengoperasikan traktor adalah terjadinya getaran. Getaran tersebut bersumber dari enjin yang merambat melalui rangkaian struktur traktor roda dua hingga akhirnya sampai pada stang kemudi (handle) yang bersentuhan langsung dengan operator. Penelitian ini bertujuan (1) memodelkan peredam getaran pada traktor roda dua dengan metode jaringan syaraf tiruan, (2) menentukan nilai kekerasan shore (shore A) karet peredam serta (3) menentukan jenis dan ketebalan karet peredam yang paling sesuai untuk mereduksi getaran pada traktor roda dua.
Sebagai obyek dalam penelitian ini digunakan tiga unit traktor roda dua dengan merek yang berbeda. Getaran diukur dengan menggunakan
vibrationmeter sedangkan putaran enjin diukur dengan menggunakan tachometer digital. Pengukuran dilakukan pada tiga arah sumbu, yaitu sumbu-x, sumbu-y dan sumbu-z. dengan berbagai tingkat putaran yang berbeda-beda.
Dua model yang digunakan adalah untuk membanding pengaruh dari karet yang didisain untuk meredam getaran. Pemodelan yang dilakukan menggunakan program Jaringan Syaraf Tiruan, proses data untuk tiga unit traktor dijalankankan secara bersamaan. Dari model I dan model II diperoleh hasil sebagai berikut :
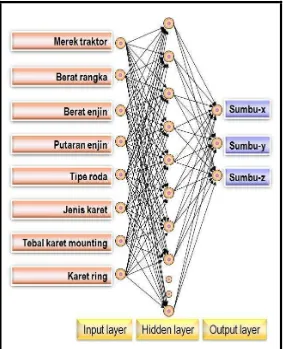
1. Model I, menggunakan 5 parameter masukan, yaitu merek traktor, berat rangka, berat enjin, tipe roda, putaran enjin. Nilai Standard Error Prediction
(SEP) training sumbu-x 0.318, sumbu-y 0.154 dan untuk sumbu-z 0.121. Sedangkan Coeffisien of Variation (CV) untuk sumbu-x adalah sebesar 18.147 %, sumbu-y 10.444 % dan untuk sumbu-z adalah sebesar 8.009 %. Nilai SEP testing untuk sumbu-x 0.389, sumbu-y 0.199, sumbu-z 0.205. Sedangkan Coeffisien of Variation (CV) untuk sumbu-x 30.528 %, sumbu-y 19.588 % dan sumbu-z 18.474 %.
2. Model II, menggunakan 8 parameter masukan, yaitu merek traktor, berat rangka, berat enjin, tipe roda, putaran enjin, jenis karet, tebal karet peredam
mounting dan karet ring. Nilai Standard Error Prediction (SEP) training sumbu-x 0.118, sumbu-y 0.105 dan untuk sumbu-z 0.117. Sedangkan
Coeffisien of Variation (CV) untuk sumbu-x adalah sebesar 30.831 %, sumbu-y 31.863 % dan untuk sumbu-z adalah sebesar 31.810 %. Nilai SEP testing untuk sumbu-x 0.099, sumbu-y 0.085, sumbu-z 0.080. Sedangkan
Coeffisien of Variation (CV) untuk sumbu-x 29.313 %, sumbu-y 29.189 % dan sumbu-z 23.818 %.
didisain tiga tingkatan kekerasan shore dan tiga ketebalan. Karet peredam yang dipakai menggunakan standar ASTM D.2240-97 dengan jenis karet alam Ma78, karet alam Mb80 dan karet sintetis Ms80. Kesemua karet dapat mereduksi getaran dengan level yang bervariasi. Sebagai aplikasi untuk mereduksi getaran pada kecepatan putaran 1600 rpm dengan frekuensi 26.6 Hz, dengan ini jenis karet peredam yang terbaik untuk mereduksi getaran adalah karet alam jenis Ma78 shore A dengan ketebalan H15 mm. Karet ini lebih lunak (soft) dari dua jenis karet lainnya dan mampu mereduksi getaran pada traktor C dengan baik ketika menggunakan roda karet yaitu pada sumbu-x sebesar 86.4 %. Sedangkan pada pengoperasian menggunakan roda besi, karet peredam ini mampu mereduksikan getaran dengan memakai karet peredam (mounting) jenis Ma78 shore A yang memiliki ketebalan H15 mm. Karet ini mampu menurunkan percepatan getaran pada sumbu-y sebesar 82.4 %.
@ Hak Cipta milik IPB, tahun 2007
Hak Cipta dilindungi Undang – Undang
1. Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumber.
a. Pengutipan hanya untuk kepentingan kependidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik atau tinjauan suatu masalah b. Pengutipan tidak merugikan kepentingan yang wajar IPB
2. Dilarang mengumumkan dan memperbanyak sebagian atau seluruh karya tulis
PEMODELAN PEREDAM GETARAN PADA
TRAKTOR RODA DUA DENGAN JARINGAN
SYARAF TIRUAN
MOHD. ARSKADIUS ABDULLAH
Tesis
sebagai salah satu syarat untuk memperoleh gelar Magister Sains pada
Program Studi Ilmu Keteknikan Pertanian
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
Judul Tesis : Pemodelan Peredam Getaran pada Traktor Roda Dua dengan Jaringan Syaraf Tiruan
Nama : Mohd. Arskadius Abdullah NIM : F151030011
Disetujui : Komisi Pembimbing
Dr. Ir. Sam Herodian, M.S Ketua
Dr. Ir. M. Faiz Syuaib, M.Agr Dr. Ir. Suroso, M.Agr Anggota Anggota
Mengetahui :
Ketua Program Studi Dekan Sekolah Pascasarjana Ilmu Keteknikan Pertanian
Prof.Dr.Ir. Armansyah H.Tambunan,M.Agr Prof. Dr. Ir. Khairil A.Notodiputro,M.S
Barangsiapa
menempuh
mencari
ilmu,
Allah
akan
memudahkan
jalan
menuju
syurga
buatnya.
Para
malaikat
membentangkan
sayapnya
bagi
pelajar,
ridha
dengan
apa
yang
dilakukan.
Sesungguhnya
mahkluk
yang
ada
dilangit
dan
dibumi,
tidak
ketinggalan
pula
ikan
disamudra,
memohon
ampun
bagi
orang
yang
berilmu
pengetahuan.
Kelebihan
orang
yang
berilmu
atas
yang
lain
ibarat
kelebihan
bulan
purnama
diatas
bintang
‐
bintang.
Para
ulama
adalah
pewaris
nabi.
Para
nabi
tidak
meninggalkan
harta
kekayaan
berupa
dinar
maupun
dirham,
tetapi
meninggalkan
(mewariskan)
ilmu
pengetahuan.
Barangsiapa
mengambil
pusaka
(warisan
ilmu),
berarti
dia
telah
mengambil
suatu
bahagian
yang
besar
sekali
manfaatnya.
(H.R
Abu
Daud
dan
Tirmidzi,
dari
Abu
Darda’)
PRAKATA
Alhamdulillah, puji syukur penulis panjatkan kehadhirat Allah SWT yang telah melimpahkan Rahmat, Karunia dan RidhaNya, sehingga penulis telah dapat menyelesaikan pendidikan dan penulisan tesis yang berjudul Pemodelan Peredam Getaran pada Traktor Roda Dua dengan Jaringan Syaraf Tiruan.
Dalam penyelesaian tesis ini penulis banyak mendapat bimbingan, arahan, dan koreksi konstruktif terutama dari komisi pembimbing. Oleh karena itu, ucapan terimakasih dan penghargaan yang setulusnya penulis sampaikan kepada komisi pembimbing: Dr. Ir. Sam Herodian, MS (Ketua), Dr. Ir. M. Faiz Syuaib, M.Agr dan Dr. Ir. Suroso, M.Agr (masing-masing Anggota).
Penghargaan yang setinggi-tingginya juga penulis sampaikan kepada : 1. Direktur Jendral Pendidikan Tinggi Departemen Pendidikan Nasional, yang
telah memberi bantuan biaya pendidikan Pascasarjana.
2. Kepada pemerintah daerah Nanggroe Aceh Darussalam yang telah mensubsidi bantuan dana.
3. Direktur Politeknik Negeri Lhokseumawe di Nanggroe Aceh Darussalam yang telah memberi izin belajar.
4. Staf pengajar jurusan Mesin dan pegawai Politeknik Negeri Lhokseumawe-Nanggroe Aceh Darussalam yang telah memberi dorongan.
5. Rektor Institut Pertanian Bogor, Dekan dan Ketua program studi Ilmu Keteknikan Pertanian Sekolah Pascasarjana IPB, yang telah menerima penulis untuk melanjutkan pendidikan di IPB.
6. Ir. Mad Yamin, MT selaku Penguji Luar Komisi yang telah memberi masukan, dan saran demi kesempurnaan penulisan tesis.
7. Mas Rudiyanto yang telah banyak membantu penulis dan teman-teman S2 dan S3 TEP. Rekan-rekan penulis lainnya: pak Kisman, Nurdin, Irwin, Samsul, Iqbal, Wardana, anggota IKAMAPA-Aceh dan teman-teman di Jl. Perwira no. 6 Dramaga yang telah membantu penulis.
8. Sembah sujud kepada ayahanda Drs. Abdullah Rayeuk, M.Si dan Ibunda Salwiyah Abdul Wahab atas dorongan dan kasih sayang serta doa yang tiada henti-hentinya untuk penulis.
9. Isteri tercinta Abidah, ananda tersayang Nasyaya Ulva dan Mohd. Maulana Alvin atas segala doa, dorongan, dan kesabaran serta kebersamaan dalam penantian.
10. Adinda Ir. Fas Nurussalami Abdullah, Ir. Mohd. Agus Nashri Abdullah, M.Si dan Dr. Mars Nashrah Abdullah, abang Drs. Edward Ibrahim serta keponakan-ponakan penulis lainnya, atas doa dan dukungan mereka selama ini.
11. Semua pihak yang telah banyak membantu kelancaran penulisan tesis ini yang tidak bisa disebut satu persatu.
Semoga bantuan moril dan spirituil yang telah diberikan untuk penulis, insyaallah diterima oleh Allah SWT dan menjadi amal ibadah di dunia dan di Yaumil Mahsyar kelak, aminn yaa rabball a’lamin.
PEMODELAN PEREDAM GETARAN PADA
TRAKTOR RODA DUA DENGAN JARINGAN
SYARAF TIRUAN
MOHD. ARSKADIUS ABDULLAH
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
PERNYATAAN MENGENAI TESIS DAN
SUMBER INFORMASI
Dengan ini saya menyatakan bahwa tesis Pemodelan Peredam Getaran pada Traktor Roda Dua adalah karya saya sendiri dan belum diajukan dalam bentuk apapun kepada Perguruan Tinggi manapun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka dibagian akhir Tesis ini.
Bogor, Juni 2007
ABSTRAK
MOHD. ARSKADIUS ABDULLAH. Pemodelan Peredam Getaran pada Traktor Roda Dua dengan Jaringan Syaraf Tiruan. Dibimbing oleh SAM HERODIAN,
M.FAIZ SYUAIB, dan SUROSO.
Mekanisasi pertanian sangat dibutuhkan dalam melaksanakan pembangunan pertanian baik di bidang perkebunan atau pertaniaan pangan. Salah satu bentuk implementasi mekanisasi pertanian adalah pemakaian traktor roda dua yang digerakkan oleh enjin yang berbahan bakar solar. Salah satu dampak penting terhadap operator dalam mengoperasikan traktor adalah terjadinya getaran. Getaran tersebut bersumber dari enjin yang merambat melalui rangkaian struktur traktor roda dua hingga akhirnya sampai pada stang kemudi (handle) yang bersentuhan langsung dengan operator. Penelitian ini bertujuan (1) memodelkan peredam getaran pada traktor roda dua dengan metode jaringan syaraf tiruan, (2) menentukan nilai kekerasan shore (shore A) karet peredam serta (3) menentukan jenis dan ketebalan karet peredam yang paling sesuai untuk mereduksi getaran pada traktor roda dua.
Sebagai obyek dalam penelitian ini digunakan tiga unit traktor roda dua dengan merek yang berbeda. Getaran diukur dengan menggunakan
vibrationmeter sedangkan putaran enjin diukur dengan menggunakan tachometer digital. Pengukuran dilakukan pada tiga arah sumbu, yaitu sumbu-x, sumbu-y dan sumbu-z. dengan berbagai tingkat putaran yang berbeda-beda.
Dua model yang digunakan adalah untuk membanding pengaruh dari karet yang didisain untuk meredam getaran. Pemodelan yang dilakukan menggunakan program Jaringan Syaraf Tiruan, proses data untuk tiga unit traktor dijalankankan secara bersamaan. Dari model I dan model II diperoleh hasil sebagai berikut :
1. Model I, menggunakan 5 parameter masukan, yaitu merek traktor, berat rangka, berat enjin, tipe roda, putaran enjin. Nilai Standard Error Prediction
(SEP) training sumbu-x 0.318, sumbu-y 0.154 dan untuk sumbu-z 0.121. Sedangkan Coeffisien of Variation (CV) untuk sumbu-x adalah sebesar 18.147 %, sumbu-y 10.444 % dan untuk sumbu-z adalah sebesar 8.009 %. Nilai SEP testing untuk sumbu-x 0.389, sumbu-y 0.199, sumbu-z 0.205. Sedangkan Coeffisien of Variation (CV) untuk sumbu-x 30.528 %, sumbu-y 19.588 % dan sumbu-z 18.474 %.
2. Model II, menggunakan 8 parameter masukan, yaitu merek traktor, berat rangka, berat enjin, tipe roda, putaran enjin, jenis karet, tebal karet peredam
mounting dan karet ring. Nilai Standard Error Prediction (SEP) training sumbu-x 0.118, sumbu-y 0.105 dan untuk sumbu-z 0.117. Sedangkan
Coeffisien of Variation (CV) untuk sumbu-x adalah sebesar 30.831 %, sumbu-y 31.863 % dan untuk sumbu-z adalah sebesar 31.810 %. Nilai SEP testing untuk sumbu-x 0.099, sumbu-y 0.085, sumbu-z 0.080. Sedangkan
Coeffisien of Variation (CV) untuk sumbu-x 29.313 %, sumbu-y 29.189 % dan sumbu-z 23.818 %.
didisain tiga tingkatan kekerasan shore dan tiga ketebalan. Karet peredam yang dipakai menggunakan standar ASTM D.2240-97 dengan jenis karet alam Ma78, karet alam Mb80 dan karet sintetis Ms80. Kesemua karet dapat mereduksi getaran dengan level yang bervariasi. Sebagai aplikasi untuk mereduksi getaran pada kecepatan putaran 1600 rpm dengan frekuensi 26.6 Hz, dengan ini jenis karet peredam yang terbaik untuk mereduksi getaran adalah karet alam jenis Ma78 shore A dengan ketebalan H15 mm. Karet ini lebih lunak (soft) dari dua jenis karet lainnya dan mampu mereduksi getaran pada traktor C dengan baik ketika menggunakan roda karet yaitu pada sumbu-x sebesar 86.4 %. Sedangkan pada pengoperasian menggunakan roda besi, karet peredam ini mampu mereduksikan getaran dengan memakai karet peredam (mounting) jenis Ma78 shore A yang memiliki ketebalan H15 mm. Karet ini mampu menurunkan percepatan getaran pada sumbu-y sebesar 82.4 %.
@ Hak Cipta milik IPB, tahun 2007
Hak Cipta dilindungi Undang – Undang
1. Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumber.
a. Pengutipan hanya untuk kepentingan kependidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik atau tinjauan suatu masalah b. Pengutipan tidak merugikan kepentingan yang wajar IPB
2. Dilarang mengumumkan dan memperbanyak sebagian atau seluruh karya tulis
PEMODELAN PEREDAM GETARAN PADA
TRAKTOR RODA DUA DENGAN JARINGAN
SYARAF TIRUAN
MOHD. ARSKADIUS ABDULLAH
Tesis
sebagai salah satu syarat untuk memperoleh gelar Magister Sains pada
Program Studi Ilmu Keteknikan Pertanian
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
Judul Tesis : Pemodelan Peredam Getaran pada Traktor Roda Dua dengan Jaringan Syaraf Tiruan
Nama : Mohd. Arskadius Abdullah NIM : F151030011
Disetujui : Komisi Pembimbing
Dr. Ir. Sam Herodian, M.S Ketua
Dr. Ir. M. Faiz Syuaib, M.Agr Dr. Ir. Suroso, M.Agr Anggota Anggota
Mengetahui :
Ketua Program Studi Dekan Sekolah Pascasarjana Ilmu Keteknikan Pertanian
Prof.Dr.Ir. Armansyah H.Tambunan,M.Agr Prof. Dr. Ir. Khairil A.Notodiputro,M.S
Barangsiapa
menempuh
mencari
ilmu,
Allah
akan
memudahkan
jalan
menuju
syurga
buatnya.
Para
malaikat
membentangkan
sayapnya
bagi
pelajar,
ridha
dengan
apa
yang
dilakukan.
Sesungguhnya
mahkluk
yang
ada
dilangit
dan
dibumi,
tidak
ketinggalan
pula
ikan
disamudra,
memohon
ampun
bagi
orang
yang
berilmu
pengetahuan.
Kelebihan
orang
yang
berilmu
atas
yang
lain
ibarat
kelebihan
bulan
purnama
diatas
bintang
‐
bintang.
Para
ulama
adalah
pewaris
nabi.
Para
nabi
tidak
meninggalkan
harta
kekayaan
berupa
dinar
maupun
dirham,
tetapi
meninggalkan
(mewariskan)
ilmu
pengetahuan.
Barangsiapa
mengambil
pusaka
(warisan
ilmu),
berarti
dia
telah
mengambil
suatu
bahagian
yang
besar
sekali
manfaatnya.
(H.R
Abu
Daud
dan
Tirmidzi,
dari
Abu
Darda’)
PRAKATA
Alhamdulillah, puji syukur penulis panjatkan kehadhirat Allah SWT yang telah melimpahkan Rahmat, Karunia dan RidhaNya, sehingga penulis telah dapat menyelesaikan pendidikan dan penulisan tesis yang berjudul Pemodelan Peredam Getaran pada Traktor Roda Dua dengan Jaringan Syaraf Tiruan.
Dalam penyelesaian tesis ini penulis banyak mendapat bimbingan, arahan, dan koreksi konstruktif terutama dari komisi pembimbing. Oleh karena itu, ucapan terimakasih dan penghargaan yang setulusnya penulis sampaikan kepada komisi pembimbing: Dr. Ir. Sam Herodian, MS (Ketua), Dr. Ir. M. Faiz Syuaib, M.Agr dan Dr. Ir. Suroso, M.Agr (masing-masing Anggota).
Penghargaan yang setinggi-tingginya juga penulis sampaikan kepada : 1. Direktur Jendral Pendidikan Tinggi Departemen Pendidikan Nasional, yang
telah memberi bantuan biaya pendidikan Pascasarjana.
2. Kepada pemerintah daerah Nanggroe Aceh Darussalam yang telah mensubsidi bantuan dana.
3. Direktur Politeknik Negeri Lhokseumawe di Nanggroe Aceh Darussalam yang telah memberi izin belajar.
4. Staf pengajar jurusan Mesin dan pegawai Politeknik Negeri Lhokseumawe-Nanggroe Aceh Darussalam yang telah memberi dorongan.
5. Rektor Institut Pertanian Bogor, Dekan dan Ketua program studi Ilmu Keteknikan Pertanian Sekolah Pascasarjana IPB, yang telah menerima penulis untuk melanjutkan pendidikan di IPB.
6. Ir. Mad Yamin, MT selaku Penguji Luar Komisi yang telah memberi masukan, dan saran demi kesempurnaan penulisan tesis.
7. Mas Rudiyanto yang telah banyak membantu penulis dan teman-teman S2 dan S3 TEP. Rekan-rekan penulis lainnya: pak Kisman, Nurdin, Irwin, Samsul, Iqbal, Wardana, anggota IKAMAPA-Aceh dan teman-teman di Jl. Perwira no. 6 Dramaga yang telah membantu penulis.
8. Sembah sujud kepada ayahanda Drs. Abdullah Rayeuk, M.Si dan Ibunda Salwiyah Abdul Wahab atas dorongan dan kasih sayang serta doa yang tiada henti-hentinya untuk penulis.
9. Isteri tercinta Abidah, ananda tersayang Nasyaya Ulva dan Mohd. Maulana Alvin atas segala doa, dorongan, dan kesabaran serta kebersamaan dalam penantian.
10. Adinda Ir. Fas Nurussalami Abdullah, Ir. Mohd. Agus Nashri Abdullah, M.Si dan Dr. Mars Nashrah Abdullah, abang Drs. Edward Ibrahim serta keponakan-ponakan penulis lainnya, atas doa dan dukungan mereka selama ini.
11. Semua pihak yang telah banyak membantu kelancaran penulisan tesis ini yang tidak bisa disebut satu persatu.
Semoga bantuan moril dan spirituil yang telah diberikan untuk penulis, insyaallah diterima oleh Allah SWT dan menjadi amal ibadah di dunia dan di Yaumil Mahsyar kelak, aminn yaa rabball a’lamin.
RIWAYAT HIDUP
Penulis dilahirkan di Kopelma Darussalam pada tanggal 22 Nopember 1965 sebagai anak pertama dari Ayahanda Drs. Abdullah Rayeuk, M.Si dan Ibunda Salwiyah Abdul Wahab.
Tahun 1985 penulis lulus SMA negeri 3 Banda Aceh dan pada tahun yang sama penulis lulus seleksi masuk Universitas Syiah Kuala melalui jalur Ujian Masuk Perguruan Tinggi Negeri (UMPTN). Penulis diterima pada Jurusan Mesin Fakultas Teknik Universitas Syiah Kuala Darussalam Banda Aceh. Pada tahun 2003 penulis diterima di program Pascasarjana IPB pada Program Studi Ilmu Keteknikan Pertanian dengan beasiswa pendidikan Pascasarjana diperoleh dari Departemen Pendidikan Nasional Republik Indonesia (BPPS) dan bantuan subsidi dari PEMDA NAD dan DAAD.
DAFTAR ISI
Halaman DAFTAR TABEL ... xi DAFTAR GAMBAR ... xii DAFTAR LAMPIRAN ... xv I PENDAHULUAN
1.1 Latar Belakang Masalah ... 1 1.2 Perumusan Masalah ... 2 1.3 Tujuan ... 2 1.4 Hipotesa ... 3 II. TINJAUAN PUSTAKA
2.1 Traktor Roda Dua ... 4 2.2 Ergonomi ... 7 2.3 Enjin Diesel ... 8 2.4 Getaran Mekanis ... 9 2.4.1 Sumber Getaran ... 13 2.4.2 Rambatan Getaran ... 13 2.4.3 Peredam ... 15 2.4.4 Bahan peredam ... 15 2.4.5 Sifat karet dan shore ... 16 2.4.6 Metode peredam getaran... 18 2.4.7 Pertimbangan dalam pemilihan peredam getaran ... 19 2.4.8 Pegas Karet dan Neoprene ... 20 2.5 Jaringan Syaraf Tiruan ... 22 2.5.1 Pembelajaran Metode Back Propagation ... 24 2.5.2 Validasi Jaringan Syaraf Tiruan ... 28 III. METODE PENELITIAN
3.1 Tempat dan Waktu Penelitian ... 30 3.2 Alat dan Bahan Penelitian ... 30 3.3 Metode Penelitian ... 32 3.3.1 Skema Aliran Kerja ... 33 3.3.2 Model Jaringan Syaraf Tiruan untuk Pendugaan Getaran 33 3.3.3 Pemilihan dan Disain Karet Peredam ... 34 3.3.4 Karet Peredam ... 38 3.3.5 Posisi Pemasangan Karet Peredam ... 39 3.3.6 Instrumen Pengukur dan Sensor ... 41 3.3.7 Faktor yang Mempengaruhi Pengukuran... 43 3.4 Pemodelan dengan Jaringan Syaraf Tiruan ... 44 3.4.1 Skema Aliran Kerja Jaringan Syaraf Tiruan ... 45 3.4.2 Model I Jaringan Syaraf Tiruan ... 45 3.4.3 Model II Jaringan Syaraf Tiruan ... 46 IV HASIL DAN PEMBAHASAN
4.1 Metode Pengambilan Data ... 48 4.2 Penyusunan Model ... 48
4.2.3 Struktur Jaringan Syaraf Tiruan ... 55 4.2.4 Model I Jaringan Syaraf Tiruan ... 55 4.2.5 Model II Jaringan Syaraf Tiruan ... 62 4.3 Nilai Kekerasan Karet ... 71 4.4 Aplikasi Karet Peredam Getaran ... 72 4.4.1 Pengaruh Traktor terhadap Getaran ... 72 4.4.2 Pengaruh Kondisi Traktor Terhadap Getaran ... 76 4.4.3 Pengaruh Jenis Karet Peredam Terhadap Getaran ... 81 4.4.4 Pengaruh Tebal Karet Peredam Terhadap Getaran ... 81 4.5 Analisis Ergonomika ... 87
4.5.1 Traktor A ... 100 4.5.2 Traktor B ... 101 4.5.3 Traktor C ... 102 SIMPULAN DAN SARAN
DAFTAR TABEL
Halaman 1 Variabel pengaruh tubuh terhadap kecepatan getaran ... 11 2 Skala ambang persepsi getaran ketidaknyamanan ... 12 3 Skala getaran ketidaknyaman ... 13 4 Menentukan kekerasan shore menurut penggunaan ... 17 5 Kekerasan shore berdasarkan tingkatan (degrees) ... 18 6 Perkiraan hasil perbandingan kekerasan dengan durometer ... 18 7 Spesifikasi teknik traktor roda dua ... 31 8 Data training dan data testing yang dipilih berdasarkan putaran
enjin (rpm) ... 54 9 Hasil training percepatan pada sumbu data ukur dan JST model I ... 56 10 Hasil testing percepatan pada sumbu data ukur dan JST model I ... 59 11 Ketelitian model I JST untuk tiga unit traktor ... 62 12 Hasil training percepatan pada sumbu data ukur dan JST model II ... 64 13 Hasil testing percepatan pada sumbu data ukur dan JST model II ... 67 14 Ketelitian model II JST tiga unit traktor... 70 15 Nilai kekerasan karet peredam (mounting) ... 71 16 Perbandingan kondisi traktor sebelum dan setelah pemasangan
karet karet peredam ... 81 17 Percepatan getaran menggunakan roda karet untuk mengetahui
lama waktu pemakaian traktor yang aman ... 100 18 Percepatan getaran menggunakan roda besi untuk mengetahui
DAFTAR GAMBAR
Halaman 1 Komponen utama traktor roda dua... 6 2 Getaran sinusoidal ... 9 3 Hubungan antara angka kekerasan durometer dengan modulus
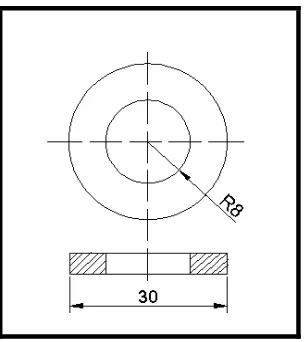
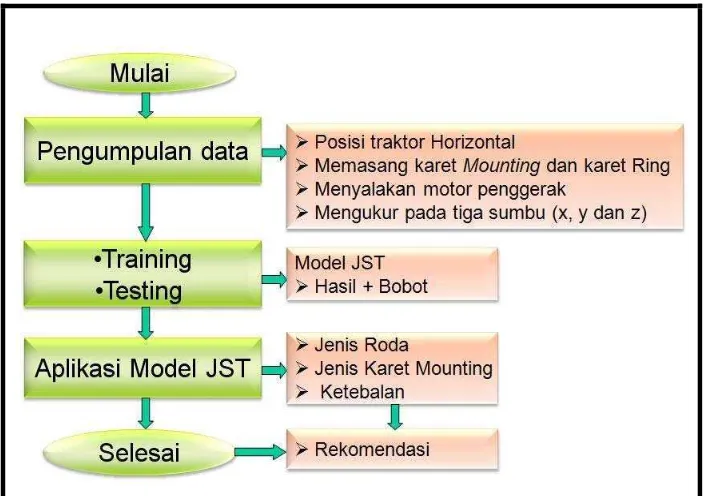
elastisitas karet... 20 4 Kerakteristik defleksi pegas karet terhadap berbagai pembebanan... 21 5 Ilustrasi sederhana jaringan syaraf tiruan ... 22 6 Ilustrasi Pembelajaran Backpropagation ... 27 7 Skema penelitian model peredam getaran pada traktor roda dua
dengan Jaringan Syaraf Tiruan ... 33 8 Disain penampang karet peredam (mounting) ... 35 9 Disain ukuran karet peredam (mounting) ... 37
10 Karet ring peredam yang di pasang pada beberapa sambungan komponen traktor roda dua ... 38 11 Posisi pemasangan karet peredam pada traktor roda dua ... 40 12 Posisi, arah dan tempat pemasangan karet peredam (mounting)
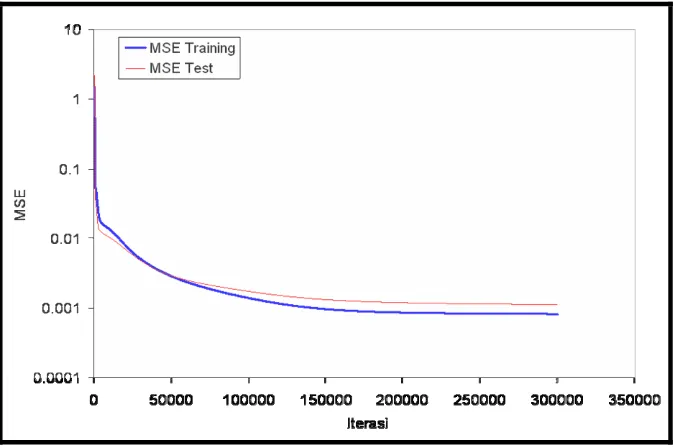
23 Percepatan pada sumbu-x data ukur dan JST model I ... 57 24 Percepatan pada sumbu-y data ukur dan JST model I ... 58 25 Percepatan pada sumbu-z data ukur dan JST model I ... 59 26 Percepatan pada sumbu-x data ukur dan JST model I ... 60 27 Percepatan pada sumbu-y data ukur danJST model I ... 61 28 Percepatan pada sumbu-z data ukur dan JST model I ... 62 29 Mean Square Error (MSE) model II ... 63
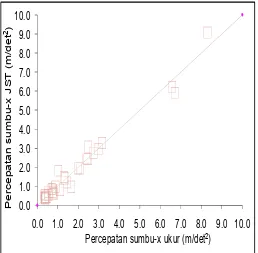
30 Percepatan pada sumbu-x data ukur dan JST model II ... 65 31 Percepatan pada sumbu-y data ukur dan JST model II ... 66 32 Percepatan pada sumbu-z data ukur dan JST model II ... 67 33 Percepatan pada sumbu-x data ukur dan JST model II ... 68 34 Percepatan pada sumbu-y data ukur dan JST model II ... 69 35 Percepatan pada sumbu-z data ukur dan JST model II ... 70 36 Kondisi tiga unit traktor memasang karet peredam Ma78
menggunakaroda karet dan roda besi ... 73 37 Kondisi tiga unit traktor memasang karet peredam Mb80
menggunakan roda karet dan roda besi ... 74 38 Kondisi tiga unit traktor memasang karet peredam Ms80
menggunakan roda karet dan roda besi ... 75 39 Pengaruh jenis dan kekerasan karet peredam menggunakan roda
karet dan roda besi pada traktor A ... 83 40 Pengaruh jenis dan kekerasan karet peredam menggunakan roda
karet dan roda besi pada traktor B ... 86 41 Pengaruh jenis dan kekerasan karet peredam menggunakan roda
karet dan roda besi pada traktor C ... 89 42 Pengaruh tebal karet peredam menggunakan roda karet dan roda
besi traktor A ... 93 43 Pengaruh tebal karet peredam menggunakan roda karet dan roda
besi traktor B ... 95 44 Pengaruh tebal karet peredam menggunakan roda karet dan roda
DAFTAR LAMPIRAN
Halaman 1 Tampilan program Jaringan Syaraf Tiruan ... 96 2 Foto copy Sertifikat hasil pengujian karet Ma78 ... 109 3 Foto copy Sertifikat hasil pengujian karet Mb80 ... 110 4 Foto copy Sertifikat hasil pengujian karet Ms80 ... 111 5 Hubungan percepatan getaran dengan frekuensi 26,6 Hz untuk
Mengetahui batas aman pengguna traktor roda dua A, roda karet ... 118 6 Hubungan percepatan getaran dengan frekuensi 26,6 Hz untuk
mengetahui batas aman pengguna traktor roda dua A, roda besi ... 119 7 Hubungan percepatan getaran dengan frekuensi 26,6 Hz untuk
mengetahui batas aman pengguna traktor roda dua B, roda karet ... 120 8 Hubungan percepatan getaran dengan frekuensi 26,6 Hz untuk
mengetahui batas aman pengguna traktor roda dua B, roda besi ... 121 9 Hubungan percepatan getaran dengan frekuensi 26,6 Hz untuk
mengetahui batas aman pengguna traktor roda dua C, roda karet ... 122 10 Hubungan percepatan getaran dengan frekuensi 26,6 Hz untuk
I. PENDAHULUAN
1.1 Latar Belakang
Indonesia merupakan negara agraris dimana sektor pertanian sampai saat ini masih merupakan sektor penting bagi negara. Beberapa hal telah dilakukan dalam usaha menunjang keberhasilan pertanian, antara lain melalui intensifikasi, ekstensifikasi, diversifikasi dan rehabilitasi. Semua kegiatan tersebut memerlukan tenaga manusia yang besar sehingga dibutuhkan alat bantu dalam menunjang kegiatan pertanian.
Di daerah pedesaan, banyak pekerjaan yang dilakukan petani dengan mengandalkan kekuatan tenaga fisik. Perekayasaan dan pemanfaatan alat dan mesin pertanian (alsintan) khususnya pada subsektor tanaman pangan dan hortikultura bertujuan untuk meringankan beban kerja petani sehari-hari, sehingga tercapai efisiensi dan mutu produksi yang sesuai dengan keinginan. Beberapa jenis alsintan yang sering dijumpai antara lain adalah traktor roda empat, traktor roda dua, alat tanam benih langsung, pompa air, power thresher
dan pedal tresher. Dalam penerapannya, berbagai alsintan masih belum merata, baik dari aspek liputan areal maupun intensitasnya.
Manusia sebagai sumber daya yang kurang efisien dan kurang efektif karena kemampuannya yang terbatas yaitu sekitar 0.1 HP untuk melakukan kerja secara terus-menerus. Sekitar 50 orang tenaga manusia dapat mengerjakan 1 Ha/hari lahan yang sudah sering diolah tanahnya. Sedangkan dua traktor dengan daya 20 HP memiliki kemampuan yang sama dengan 100 orang dengan alat sederhana untuk mengolah lahan (Daywin et al.1991).
Pada prinsipnya mekanisasi pertanian bertujuan untuk mengubah pola pertanian tradisional dengan produktivitas rendah, statis dan subsistem menjadi pola pertanian modern dengan produktivitas yang dapat ditingkatkan, dinamis dan komersil. Peran alat dan mesin pertanian dalam usaha tani adalah untuk meningkatkan produktivitas kerja dan pendapatan petani, menekan biaya produksi dan memperbaiki mutu hasil. Peningkatan kebutuhan pangan dan produk pertanian lainnya akan terus meningkat, tidak terbatas pada kuantitas saja tetapi juga dalam hal kualitas.
traktor, khususnya traktor roda dua. Oleh karena itu perlu diperhatikan agar getaran yang ditimbulkan alat dan mesin mekanisasi pertanian tidak melebihi standar aman yang dapat diterima oleh manusia untuk mencapai kenyamanan dan keselamatan kerja sehingga efisiensi dan produktivitas kerja yang optimal akan tercapai.
1.2 Perumusan Masalah
Penggunaan traktor roda dua di Indonesia sudah cukup luas pada bidang pertanian. Traktor roda dua terdiri dari beberapa bagian utama, salah satu adalah enjin sebagai tenaga penggerak. Akan tetapi dalam penggunaannya, enjin diesel tersebut terdapat beberapa kelemahan antara lain besarnya getaran dan tingginya tingkat kebisingan yang ditimbulkan pada saat beroperasi.
Getaran yang terjadi pada traktor roda dua bersumber dari enjin penggerak. Besarnya getaran pada traktor roda dua dipengaruhi oleh beberapa hal diantaranya yaitu getaran enjin penggerak, konstruksi komponen, ukuran komponen, bahan komponen, keadaan traktor dan jenis tanah serta kondisi operator traktor roda dua.
Getaran yang terjadi pada traktor umumnya diakibatkan oleh kerja enjin diesel yaitu terjadinya gerak bolak-balik piston di dalam ruang silinder yang diteruskan dengan sistem penyaluran tenaganya. Selanjutnya getaran tersebut akan menjalar melalui struktur rangka traktor hingga akhirnya akan sampai pada stang kemudi yang kontak langsung dengan operator.
Getaran dapat menimbulkan efek terhadap operator, diantaranya adalah cepat lelah dan berkurangnya konsentrasi pada pekerjaan. Hal ini dapat meningkatkan resiko kecelakaan kerja yang perlu diantisipasi dengan melakukan pendekatan ergonomika. Ergonomika adalah disiplin ilmu yang mengkaji interaksi antara manusia dengan sistim dan lingkungan kerjanya dengan tujuan untuk meningkatkan keamanan, keselamatan dan kenyamanan kerja sehingga tercapai produktifitas yang optimal.
1.3 Tujuan Penelitian :
1. Membuat pemodelan sistem peredam getaran pada traktor roda dua dengan metode Jaringan Syaraf Tiruan.
3. Menentukan ketebalan karet peredam yang paling sesuai untuk mereduksi getaran pada traktor roda dua.
1.4 Hipotesis
II. TINJAUAN PUSTAKA
2.1 Traktor Roda Dua
Pengolahan lahan pertanian dengan menggunakan mekanisasi yang moderen yaitu traktor, baik yang roda empat dan roda dua atau lebih dikenal dengan sebutan traktor tangan. Bila dilihat dari segi ekonomis, penggunaan traktor roda dua di Indonesia lebih unggul dan lebih efektif. Karena lahan pertanian di Indonesia pada umumnya terdapat lahan kecil dan sempit. Apabila digunakan traktor roda empat kurang efektif, hal ini mengingat bahwa traktor tersebut memerlukan lahan yang luas dan sangat sulit bila dioperasikan pada lahan yang sempit.
Traktor roda dua sudah lama dikenal oleh petani di Indonesia. Jenis traktor ini semakin banyak digunakan khususnya dalam pengelolaan tanah oleh para petani sebagai usaha untuk meningkatkan produktifitas. Hal ini terlihat dengan semakin bertambahnya jumlah traktor di lapangan untuk mengolah lahan. Data terakhir diketahui bahwa populasi traktor tangan di Indonesia pada tahun 2002 sebanyak 101.433 unit dengan luas lahan 7.890.000 ha (BPS 2002). Dibandingkan dengan luas lahan pertanian di Indonesia, berarti saat ini idealnya Indonesia harus memiliki traktor roda dua sejumlah 526.000 unit. Hal ini mengingat kerja ideal satu unit traktor roda dua dengan daya ±7 PK dapat mengolah lahan 15 ha untuk setiap musim tanam.
Meskipun masih banyak keluhan yang disampaikan oleh petani dalam penggunaan traktor roda dua di lapangan, seperti menyangkut dengan biaya investasi yang masih sangat mahal bagi ukuran petani di Indonesia, dan segi teknis seperti dimensi yang terlalu besar apabila dibandingkan dengan ukuran tubuh para petani. Disamping masalah dimensi, beratnya beban biaya dalam mengoperasikan traktor roda dua, juga menjadi masalah bila dibandingkan dengan menggunakan tenaga hewan untuk mengolah lahan pertanian.
diketahui bahwa dalam kurun waktu 1983 - 1993 terjadi penurunan jumlah kepemilikan lahan oleh petani yaitu untuk luas kepemilikan di bawah 0.5 ha mengalami penurunan sebesar 2.53% sedangkan untuk luas kepemilikan di atas 0.5% terjadi penurunan sebesar 11.93%. Hal ini menunjukkan bahwa semakin lama petakan lahan yang dimiliki oleh petani di Indonesia semakin sempit sehingga akan berpengaruh terhadap aplikasi mekanisasi pertanian khususnya traktor roda dua di lapangan (Akbar et al. 2005).
Traktor roda dua (two wheel drive) atau traktor tangan (hand tractor) adalah mesin pertanian yang dapat dipergunakan untuk mengolah tanah dan pekerjaan pertanian lainnya, alat pengolahannya digandengkan atau dipasang di bagian belakangnya. Mesin ini mempunyai efisiensi yang tinggi, karena pembalikan dan pemotongan tanah dapat dikerjakan dalam waktu bersamaan (Hardjosentono et al. 1985).
Menurut Sembiring et al. (1991), berdasarkan cara pemanfaatan tenaga untuk alat-alat yang dipergunakan, secara umum traktor roda dua dapat dibedakan menjadi :
1. Pemanfaatan tenaga dari traktor roda dua ini dapat menarik alat atau implemen yang digandengkan pada bagian belakang traktor.
2. Traktor roda dua tipe penggerak (Drive Type) atau sering dikatakan sebagai Power Tiller. Pemanfaatan tenaga dari traktor roda dua ini memerlukan suatu sistem transmisi, karena implemen yang dipasangkan adalah implemen yang bergerak, misalnya bajak rotari.
3. Traktor roda dua tipe kombinasi. Pemanfaatan tenaga dari traktor roda dua ini adalah kombinasi dari traktor roda dua yang tersebut di atas.
Gambar 1 Komponen utama traktor dua-roda (Sakai et al. 1998)
Sedangkan menurut Sembiring et al. (1991), bagian-bagian utama traktor roda dua adalah:
1. Sumber tenaga enjin bakar
Traktor roda dua tipe tarik biasanya mempergunakan enjin berpendingin udara sebagai sumber tenaganya, sedangkan traktor roda dua tipe penggerak dan tipe kombinasi mempergunakan enjin bahan bakar Diesel berpendingin air.
2. Sistem transmisi
Sistem transmisi traktor roda dua terdiri atas tiga bagian utama yaitu :
a. V-belt, yang berfungsi untuk menyalurkan tenaga dari poros engkol enjin bakar ke poros utama.
b. Kopling, berfungsi untuk menghubungkan atau memutuskan aliran tenaga yang disalurkan oleh V-belt.
c. Gigi transmisi, yang berfungsi untuk mengubah kecepatan dan torsi yang dihasilkan oleh sumber tenaga dan menyalurkannya ke kedua penggerak. 3. Roda
Di samping menggunakan roda ban untuk pengoperasian di lahan atau untuk transportasi pada jalan umum, ada berbagai jenis roda bukan ban yang dapat dipergunakan untuk berbagai jenis pengoperasian di lahan antara lain : Pipe Wheels, Float Wheels, Cage Wheel, dan lain sebagainya. Cage Wheels
2.2 Ergonomi
Ergomomika adalah ilmu terapan yang menggabungkan ilmu-ilmu biologi bersama dengan ilmu-ilmu teknik dan teknologi untuk mencapai kecocokan atau penyesuaian (to mach) terhadap suatu produk, pekerjaan dan tempat kerja dengan orang yang menggunakan, dimana manfaatnya di ukur dari efesiensi dan kesejahteraan atau kenyamanan kerja (Riyadina 2002).
Istilah ergonomi berasal dari bahasa latin yaitu ergon (kerja) dan nomos (hukum alam) dan dapat didefinisikan sebagai studi tentang aspek-aspek manusia dalam lingkungan kerjanya yang ditinjau secara anatomi, fisiologi, engineering, manajemen dan disain/perancangan. Ergonomi berkenaan pula dengan optimasi, efisiensi, kesehatan, keselamatan dan kenyamanan manusia di tempat kerja, di rumah, dan tempat rekreasi. Dalam ergonomi dibutuhkan studi tentang sistem dimana manusia, fasilitas kerja dan lingkungannya saling berinteraksi dengan tujuan utama yaitu menyesuaikan suasana kerja dengan manusia atau ergonomi disebut juga sebagai human factor (Nurmianto 2004).
Penerapan ergonomika pada berbagai jenis pekerjaan telah terbukti menyebabkan perbaikan efisiensi dan kenaikan produktivitas yang dapat dilihat dari kualitas dan kuantitas hasil kerja bisa mencapai 10% atau lebih (Kusen 1989).
Secara singkat dapat dikatakan bahwa ergonomi ialah penyesuaian tugas pekerjaan dengan kondisi tubuh manusia ialah untuk menurunkan stress yang akan dihadapi. Upayanya antara lain berupa menyesuaikan ukuran tempat kerja dengan dimensi tubuh agar tidak melelahkan, pengaturan suhu, cahaya dan kelembaban bertujuan agar sesuai dengan kebutuhan tubuh manusia. Ada beberapa definisi menyatakan bahwa ergonomi ditujukan untuk “fitting the job to the worker”, sementara itu ILO antara lain menyatakan,sebagai ilmu terapan biologi manusia dan hubungannya dengan ilmu teknik bagi pekerja dan lingkungan kerjanya, agar mendapatkan kepuasan kerja yang maksimal selain meningkatkan produktivitasnya.
Pertimbangan ergonomi terutama yang berkaitan dengan getaran enjin, kebisingan, efek gas buang, beban traktor terhadap operator dan bentuk rancangan menjadi hal penting dalam pemilihan suatu tipe traktor tangan. Sebagai contoh adanya gangguan pada persendian (pinggang dan tangan), pusing-pusing dan rasa mual serta gangguan pada telinga (mendengung). Hal ini menunjukkan bahwa pada kondisi dan waktu tertentu ternyata penggunaan traktor tangan ada dampak negatifnya pada fisik operator. Dengan demikian sangat penting bila pemakaian traktor tangan berdasarkan pengalaman lebih mementingkan faktor keamanan dan kenyamanan dalam bekerja.
Kastaman (1999) menuliskan bahwa pemakaian traktor roda dua di Jawa Barat yang bekerja di lahan sawah rata-rata selam 8 hingga 10 jam per hari dan apabila dilihat dari tingkat kelelahan yang ditimbulkan saat bekerja dengan traktor roda dua menunjukkan bahwa aktifitas pengolahan tanah dengan traktor roda dua tersebut termasuk aktifitas dengan tingkat kelelahan antara ringan hingga sedang. Artinya traktor roda dua tersebut tidak sampai membebani operator atau pemakainya. Namun bila dilihat dari tingkat kebisingan yang ditimbulkan enjin dengan lama waktu operasi 9 hingga 10 jam. Getaran yang ditimbulkan oleh enjin penggerak. Dimana efek samping yang terjadi dari getaran ini berdasarkan pangalaman pemakai bahwa terjadi pegal-pegal terutama pada daerah pergelangan tangan dan pinggang. Pengaruh getaran yang berlebihan terhadap tubuh adalah adanya gangguan pada jaringan pembuluh darah dan sistim saraf atau yang dikenal dengan istilah vibration white finger (VWB)
2.3 Enjin Diesel
Pengaruh gerakan mekanis dan gesekan antara komponen-komponen enjin selama proses pembakaran berlangsung dalam ruang bakar, mengakibatkan terjadinya getaran. Selanjutnya getaran tersebut merambat kesemua arah berupa energi melalui rangka traktor hingga ke stang kemudi.
2.4 Getaran Mekanis
Getaran mekanis yang terjadi pada traktor tangan terpusat pada engine yang merupakan sumber tenaga penggerak. Kerja dari engine ini menimbulkan getaran mekanis dan bunyi (suara). Hal ini terjadi karena adanya perubahan frekuensi atau tekanan udara maupun suara akibat dari adanya gesekan antara komponen-komponen enjin. Sehingga menghasilkan tenaga secara keseluruhan dan perubahan bentuk energi yang terjadi dalam engine, misalnya perubahan dari energi kimia menjadi energi kinetik atau menjadi gerak translasi lainnya
[image:36.595.203.420.500.718.2]Getaran pada umumnya terjadi akibat efek dinamis dan toleransi pembuatan, ketegangan, kontak dengan bagian yang berputar dan bergesek antara elemen-elemen enjin serta adanya gaya yang menimbulkan suatu momen yang tidak seimbang pada bagian-bagian yang berputar. Osilasi kecil dapat memicu frekuensi resonansi dari beberapa bagian struktur dan diperkuat menjadi sumber-sumber kebisingan (noise) dan getaran yang utama (James 1994). Getaran sinusoidal berupa gerakan harmonis sederhana dapat dilihat pada Gambar 2.
Getaran yang terjadi pada benda yang bergerak dapat disebabkan oleh beberapa faktor, antara lain gaya akibat tumbukan, gaya yang tidak konstan, gaya gesek yang tidak konstan, gaya cairan yang tidak stabil, gaya magnetik yang berfluktuasi dan interaksi gaya mekanis yang tidak stabil.
Titik proyeksi penyebab getaran berupa satu garis lurus yang panjangnya menunjukkan amplitudo getaran. Persamaan gerak dari titik hasil proyeksi tersebut adalah:
)
sin(
ω
+
θ
⋅
=
A
t
x
……….1dimana :
x = jarak perpindahan titik (m) A = amplitudo
ω
= kecepatan sudut (radian/detik) t = waktu (detik)θ
= sudut awal (radian)Persamaan kecepatan getaran adalah turunan pertama dari persamaan gerak:
)
cos(
ω
θ
ω
×
+
×
=
A
t
v
……….2dimana :
v = kecepatan (m/detik)
Persamaan percepatan adalah turunan kedua persamaan gerak
)
sin(
2
ω
θ
ω
×
+
×
=
A
t
a
……….3dimana :
a = percepatan (m/detik2)
Getaran adalah gerakan dari benda atau sistem yang berulang dengan selang waktu tertentu yang disebut sebagai perioda. Jumlah siklus gerakan tiap satuan waktu tertentu disebut frekuensi. Amplitudo adalah jarak terjauh dari titik equilibrium, sehingga jarak total yang dilalui adalah dua kali amplitudo. Benda yang bergetar pada frekuensi yang sama dapat saling mempengaruhi dan disebut dalam keadaan beresonansi.
diulang dalam selang waktu yang persis sama tiap siklus (memiliki perioda). Pada getaran tidak beraturan, gerakan terjadi secara tidak beraturan dan terjadi kembali pada waktu yang tidak tertentu.
Dalam pemakaian alat atau saat berada dalam sebuah ruangan adakalanya getaran yang timbul disekitar bisa nyaman atau tidak nyaman dirasakan oleh tubuh manusia. Getaran dengan frekuensi rendah bisa menyebabkan gangguan pada tubuh manusia. Ada tiga katagori yang dapat menyebabkan gangguan tersebut, yaitu :
a. Penyebab getaran pada seluruh tubuh manusia terjadi apabila tubuh berhubungan langsung dengan alat yang bergetar.
b. Getaran yang membuat rasa tidak nyaman dapat terjadi apabila getaran tersebut kontak langsung dengan tubuh manusia. Dan ini biasanya berfrekuensi dibawah 1 Hz.
c. Getaran melalui tangan yang disebabkan oleh beberapa proses pada kegiatan industri, pertanian, konstruksi, pertambangan dan transportasi dimana alat yang bergetar tersebut kontak langsung dengan tangan (Griffin 2006).
Getaran yang terjadi pada lingkungan kerja berpengaruh pada tubuh manusia. Hal tersebut seperti dikemukakan oleh Griffin (2006) yaitu beberapa pengaruh yang berbeda dari getaran terhadap tubuh manusia dan banyak variabel peubah yang mempengaruhi dari efek tersebut dan dapat dikatagorikan sebagai variabel luar (ektrinsik variabel) dan variabel dalam (intrisik variabel), diantaranya adalah :
Menurut Griffin (2006) untuk melakukan pengukuran getaran dan arah gerakannya meliputi tiga hal, yaitu kecepatan, percepatan yang merupakan perubahan rata-rata percepatan dan perpindahan getaran yang meliputi :
a. Besaran dari getaran itu dapat dihitung dengan perpindahan, kecepatan dan percepatannya.
b. Frekuensi getaran merupakan jumlah atau siklus getaran/det2 (Hz). Frekuensi getaran ini menyebabkan getaran dapat ditransmisikan ke seluruh permukaan tubuh.
c. Arah getaran, biasanya getaran diukur pada permukaan antara tubuh dan permukaan yang sedang bergetar pada 3 arah ortogonal yaitu pada sumbu x, y dan sumbu z.
d. Lama getaran yang terjadi merupakan jumlah waktu getaran yang dirasakan pada tubuh tergantung atas besaran kecepatan. Percepatan yang terjadi dapat menunjukkan ketidaknyamanan atau gangguan apabila percepatan berubah-ubah dari waktu kewaktu.
Ambang batas persepsi getaran mekanis pada selang frekuensi 1 – 100 Hz terhadap tubuh manusia secara umum dapat dilihat pada tabel 2 berikut ini :
Tabel 2 Skala ambang persepsi getaran ketidaknyamanan Percepatan (m/det2) Katagori ambang
10 ambang sangat berbahaya
1 ambang nyaman
0,1 ambang rasa
0,01 ambang persepsi
a. Pengaruh frekuensi dan arah getaran.
ditentukan oleh equevalent comfort countours. Untuk mengurangi jumlah besar frekuensi faktor multiplaying yang berbeda dapat menyebabkan perbedaan kepekaan antara sumbu getaran. Besaran frekuensi tadi (rms) kadang-kadang disebut compount ride value. Getaran yang terjadi pada beberapa sumbu sangat tidak nyaman apabila terjadi pada satu sumbu saja. Untuk mendapatkan overal ride value dihitung dengan menjumlahkan akar kuadrat ride value tersebut. Bagian yang memiliki overal ride value yang tertinggi merupakan bagian yang paling tidak nyaman yang diakibatkan oleh getaran tersebut. Overal ride value dapat juga dibandingkan dengan skala ketidaknyamanan sebagaimana ditunjukkan pada Tabel 3.
Tabel 3 Skala getaran ketidaknyaman
b. Pengaruh lama getaran
Ketidaknyamanan akibat getaran cendrung meningkat dengan meningkatnya periode getaran yang diterima tubuh. Laju peningkatan tersebut dapat dipengaruhi beberapa faktor tetapi yang paling menentukan adalah faktor percepatan pangkat 4 (empat) dan lama getaran yang dapat diterima tubuh.
2.4.1 Sumber getaran
ukuran komponen traktor tangan, bahan komponen traktor tangan, keadaan dan jenis tanah serta kondisi operator.
Berdasarkan arah gerakannya, getaran dibagi menjadi getaran rektiliniear dan gerakan torsional. Getaran rektilinear digolongkan dalam dua bentuk, yaitu bentuk longitudinal dimana ekstensi dan kompresi terjadi secara aksial pada batang dan kawat, dan tranversal dimana gerakannya tegak lurus terhadap sumbunya. Amplitudo pada getaran rektilinear adalah dalam satuan jarak. Sedangkan getaran torsional, gerakannya memuntir dan satuan yang digunakan untuk amplitudo adalah satuan sudut.
Benda yang bergetar pada frekuensi yang sama dapat saling mempengaruhi, dan disebut dalam keadaan beresonansi. Berdasarkan kontinuitas, getaran dapat dibedakan antara getaran alami dan getaran paksa. Perbedaan dan prinsip antara keduanya adalah mengenai gaya luar yang turut berpengaruh pada sistem yang bergetar.
Apabila tidak ada peredaman (damping), getaran alami yang terjadi akan terus berlanjut. Dalam kenyataannya, energi gerak yang ada tidak dapat dipertahankan terus, akan tetapi mengalami kehilangan akibat friksi.
2.4.2 Rambatan Getaran
Getaran mekanis dapat mencapai operator melalui beberapa cara hantaran. Cara pertama, getaran dihantarkan pada seluruh tubuh pekerja melalui dasar atau badan enjin yang bergetar, yang disebut sebagai whole-body vibration. Dalam banyak hal, getaran dihantarkan ke tubuh secara lokal melalui tangan, sehingga getaran jenis ini disebut sebagai segmental vibration (Heryanto 1988).
perlu optimasi dan kombinasi dimensi, bentuk serta pemakaian material yang sesuai.
Getaran yang dirasakan oleh tangan dapat menyebabkan bebarapa gejala gangguan. Hubungan gejala tersebut masih belum banyak diketahui, tetapi ada lima jenis gangguan yang sudah terindentifikasi. Antara lain berupa gangguan sirkulasi, gangguan persendian, gangguan saraf, gangguan otot dan gangguan sistem sirkulasi lainnya. Dimana masing-masing gangguan tersebut dipengaruhi beberapa aspek lingkungan yang lain. Gangguan-gangguan tersebut juga diistilahkan dengan vibration syndrom atau band arm vibration syndrom. Yaitu getaran yang ditransmisikan lewat tangan. Getaran dari alat yang digunakan bervariasi dan sangat tergantung atas disain atau metode penggunaan dari alat tersebut. Oleh sebab itu tidak mungkin digolongkan setiap jenis alat apakah nyaman atau berbahaya (Griffin 2006).
2.4.3 Peredam
Peredam memiliki karakteristik yang lebih lunak dan tidak mudah dipengaruhi oleh energi akibat rambatan getaran kebagian berikutnya. Tujuan utama dari peredam getaran adalah untuk mengurangi efek dari getaran. Dalam berbagai aplikasi, peredam harus bersifat lunak, mampu menyangga beban yang diberikan dan dapat bertahan terhadap keadaan lingkungan sekitarnya. Adapun karakteristik dari karet peredam adalah :
2.4.4 Bahan peredam
Cara yang paling efektif mengurangi getaran adalah apabila pemasangan bahan peredam dilakukan pada lokasi yang dekat dengan sumber getaran dan permukaan yang diukur.
Lembaran karet busa dapat ditemukan dalam berbagai bentuk dan kekakuan. Tingkat kekakuan bahan tersebut bertambah sangat cepat dengan penambahan beban dan peningkatan frekuensi. Karet busa yang berupa sel terbuka cenderung menyerap cairan sehingga untuk penggunaannya perlu ditambahkan material berupa sel yang tertutup. Bahan ini relatif kuat, ringan dan tidak mahal, akan tetapi nilai kekakuannya bervariasi dengan perubahan suhu permukaan (Spotts 1985).
Pada kasus-kasus di atas, perhitungan didasarkan pada asumsi bahwa gaya yang bekerja tidak mengalami pengurangan. Pada kenyataannya menurut Mabie dan Ocvirk (1977), gerakan benda akan selalu berkurang, yang umumnya akibat adanya gesekan. Keadaan ini mendorong terjadinya peredaman getaran. Friksi dapat terjadi dalam bentuk tahanan akibat viskositas cairan, geseran dari permukaan benda yang bergerak, atau dapat juga akibat tahanan geser internal dari benda. Karet peredam yang banyak terdapat dipasaran adalah berupa dari bahan karet, gabus dan fiber yang mempunyai nilai friksi internal yang besar.
2.4.5 Sifat karet dan shore
Bahan karet memiliki beberapa sifat, salah satunya adalah sifat kekerasan atau merupakan sifat perlawanan karet terhadap pengaruh akibat pembebaban maupun beban kompres. Pengujian kekerasan hanya dilakukan pada karet yang divulkanisasi. Kekerasan karet tergantung pada jumlah dan jenis bahan pelunak yang digunakan dalam penyusunan campuran (komponen). Dengan demikian kekerasan suatu vulkanisasian dapat diatur menurut kehendak. Pengujian kekerasan ada dua metode, yaitu dengan metode Durometer dan metode IRHD (International Rubber Hardness Degrees).
a Metode dengan menggunakan durometer, dimana metode ini pada durometer memiliki jarum dengan ujung berbentuk tumpul dan pada saat pembebanan dilakukan, jarum keluar dari sebuah lubang bagian bawah dimana specimen
uji diletakkan. Sebuah skala pembacaan 0 - 100 untuk menunjukkan uji kekerasan yang diukur oleh pegas. Skala ini dikalibrasi menurut sebuah kurva linier dengan pembacaan 0 pada beban 56 gram (BS 2119, 1956).
sama dengan metode shore durometer. Perbedaannya terletak pada bentuk jarum dan kaki penekan dengan beban tetap diatas specimen uji. Selanjutnya sebuah penggetar listrik (vibrator) digunakan untuk menghilangkan gesekan antara karet dengan jarum selama proses pembebanan uji dilakukan.
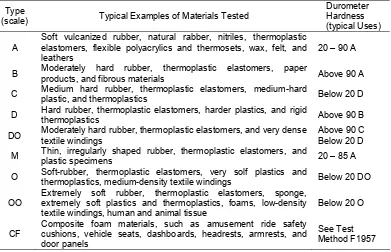
[image:44.595.120.511.306.558.2]Kekerasan material yang memiliki sifat elastis dan plastis dinyatakan dengan shore. Tingkatan (level) kekerasan shore berbeda-beda. Berdasarkan penggunaannya menurut ASTM (2006), secara umum tingkatan atau level (degrees) kekerasan shore dapat digolongkan dalam beberapa tingkatan seperti pada Tabel 4 berikut ini :
Tabel 4 Menentukan kekerasan shore menurut penggunaan
Type
(scale) Typical Examples of Materials Tested
Durometer Hardness (typical Uses)
A
Soft vulcanized rubber, natural rabber, nitriles, thermoplastic elastomers, flexible polyacrylics and thermosets, wax, felt, and leathers
20 – 90 A
B Moderately hard rubber, thermoplastic elastomers, paper
products, and fibrous materials Above 90 A
C Medium hard rubber, thermoplastic elastomers, medium-hard
plastic, and thermoplastics Below 20 D
D Hard rubber, thermoplastic elastomers, harder plastics, and rigid
thermoplastics Above 90 B
DO Moderately hard rubber, thermoplastic elastomers, and very dense textile windings
Above 90 C Below 20 D
M Thin, irregularly shaped rubber, thermoplastic elastomers, and
plastic specimens 20 – 85 A
O Soft-rubber, thermoplastic elastomers, very solf plastics and
thermoplastics, medium-density textile windings Below 20 DO
OO
Extremely soft rubber, thermoplastic elastomers, sponge, extremely soft plastics and thermoplastics, foams, low-density textile windings, human and animal tissue
Below 20 O
CF
Composite foam materials, such as amusement ride safety cushions, vehicle seats, dashboards, headrests, armrests, and door panels
See Test Method F1957
Annual Book of ASTM Standards 2006, section nine rubber [ASTM 2240-05]
Tabel 5 Kekerasan shore berdasarkan tingkatan (degrees)
Durometer Type (Shore) Applicable to these types of materials
Type A (Shore) Soft rubber & plastics
Type D (Shore) Hard rubber & plastics
Type 00 (Shore) Sponge & foam
Tabel 6 Perkiraan hasil perbandingan kekerasan dengan durometer
Jenis kekerasan shore
Shore A Shore D Shore OO
100 58 95 46 90 39 85 33
80 29 98
75 25 97
70 22 95
65 19 94
60 16 93
55 14 91
50 12 90
45 10 88
40 8 86
35 7 83
30 6 80
25 76
20 70
15 62
10 55
5 45
2.4.6 Metode peredam getaran
Untuk mengurangi efek negatif dari getaran enjin, perlu dilakukan modifikasi pada peralatan. Pengurangan getaran menurutnya dapat dilakukan dengan mengadakan perubahan-perubahan yaitu :
a. Mengurangi getaran yang terjadi pada sumbernya.
b. Mengurangi transmisi dari sumber getaran sampai permukaan yang diukur.
Bahan isolator yang berasal dari karet dapat ditemukan dalam bentuk yang bervariasi, didisain dengan kekakuan untuk beberapa arah. Bahan isolator ini dapat mengisolasi getaran dengan frekuensi pengusik serendah 10 Hz dan amplitudo kecil. Dengan dikembangkannya karet sintetis yang tahan minyak dan tahan panas serta kemajuan dalam teknik pengelasan karet pada permukaan logam, maka kini telah dapat dihasilkan karet pencegah getaran untuk tumpuan enjin. Karet sangat baik untuk menghambat laju getaran dan bunyi dari sumbernya. Namun karet mempunyai kelemahan karena menjadi lapuk dalam waktu yang relatif pendek dibandingkan dengan logam, dan kurang tahan terhadap minyak, panas dan asam (Sularso dan Suga 1987).
Lembaran karet busa dapat ditemukan dalam berbagai bentuk dan kekakuan. Tingkat kekakuan bahan tersebut bertambah sangat cepat dengan penambahan beban dan peningkatan frekuensi. Karet busa yang berupa sel terbuka cenderung menyerap cairan sehingga untuk penggunaannya perlu ditambahkan material berupa sel yang tertutup. Bahan ini relatif kuat, ringan dan tidak mahal, akan tetapi nilai kekakuannya bervariasi dengan perubahan suhu permukaan (Spotts 1985).
Pada kasus-kasus di atas, perhitungan didasarkan pada asumsi bahwa gaya yang bekerja tidak mengalami pengurangan. Pada kenyataannya menurut Mabie dan Ocvirk (1977), gerakan benda akan selalu berkurang, yang umumnya akibat adanya gesekan. Keadaan ini mendorong terjadinya peredaman getaran. Friksi dapat terjadi dalam bentuk tahanan akibat viskositas cairan, geseran dari permukaan benda yang bergerak, atau dapat juga akibat tahanan geser internal dari benda. Karet peredam yang banyak terdapat dipasaran adalah berupa dari bahan karet, gabus dan fiber yang mempunyai nilai friksi internal yang besar.
Cara yang paling efektif mengurangi getaran adalah apabila pemasangan bahan peredam dilakukan pada lokasi yang dekat dengan sumber getaran dan permukaan yang diukur.
2.4.7 Pertimbangan dalam pemilihan peredam getaran
- Cukup lunak agar sesuai dengan tingkat isolasi yang diinginkan - Mampu menyangga beban yang diberikan
- Dapat bertahan terhadap keadaan lingkungan sekitar, seperti suhu, kelembaban, uap bahan bakar dan korosi.
Secara umum pegas (logam) akan mengalami defleksi yang besarnya berbanding lurus (linear) dengan gaya yang bekerja padanya. Hal ini tidak sesuai dengan kebutuhan. Karena untuk enjin penggerak diperlukan tahanan dari pegas yang akan bertambah besar sebanding dengan gaya yang bekerja. Dalam hal ini sekalipun terjadi tarikan dari sabuk (belt) yang menghubungkan transmisi dengan enjin penggerak, maka kedudukan enjin penggerak tetap stabil dan tidak terjadi slip yang terlalu besar. Dengan demikian, akibat pemasangan peredam getaran tidak akan banyak mempengaruhi kemampuan kerja dari traktor roda dua.
2.4.8 Pegas Karet dan Neoprene
Pengetahuan tentang sifat karet untuk pembebanan belum banyak terungkap, dan perhitungan yang dilakukan hanya dapat berupa pendekatan saja. Menurut Spotts (1985), modulus elastisitas karet bergantung pada angka kekerasan durometer, sebagaimana ditampilkan pada Gambar 3.
Gambar 3 Hubungan antara angka kekerasan durometer dengan modulus elastisitas karet (Spotts, 1985)
lebih besar bila dibandingkan dengan kompresi dan tarikan (Black dan Adams 1981), sebagaimana dapat dilihat pada Gambar 4.
Gambar 4 Kerakteristik defleksi pegas karet terhadap berbagai pembebanan (Black dan Adams 1981)
Bahan isolator yang berasal dari karet dan neoprene (elastomer) dapat ditemukan dalam bentuk yang bervariasi, didisain dengan kekakuan untuk beberapa arah. Bahan isolator ini dapat mengisolasi getaran dengan frekuensi pengusik serendah 10 Hz (Spotts 1985) dan amplitudo yang kecil (Sularso dan Suga 1987). Bahan ini relatif kuat, ringan dan tidak mahal, akan tetapi nilai kekakuannya bervariasi dengan perubahan suhu (Spotts 1985). Selain itu, sifatnya adalah tidak cenderung memperbesar getaran seperti pada pegas logam pada frekuensi pribadinya (Sularso dan Suga 1987).
Karet alam mempunyai beberapa kelemahan dan kelebihan bila dibandingkan dengan karet sintetis. Menurut Black dan Adams (1981) bahwa karet alam mempunyai sifat meredam getaran. Karet alam lebih kuat dan murah, akan tetapi mudah rusak akibat hidrokarbon, ozon serta suhu tinggi (Spotts 1985) dan asam (Sularso dan Suga 1987).
secara perlahan tetapi berlangsung terus-menerus dengan pembebanan yang besar, khususnya pada suhu yang tinggi (Spotts 1985).
Karet peredam yang digunakan, sebaiknya adalah yang tahan terhadap beban lingkungan kerja, akan tetapi karet tersebut lebih mahal dari karet alam yang tanpa perlakuan. Hal ini karena karet tersebut perlu perlakuan khusus dengan bahan kimia berupa Neoprene, EPDM, Chlorobutyl, Silicon, Viton dan lain-lain. Karet seperti ini lebih dikenal dengan nama karet sintetis.
2.5 Jaringan Syaraf Tiruan (Artificial Neural Network)
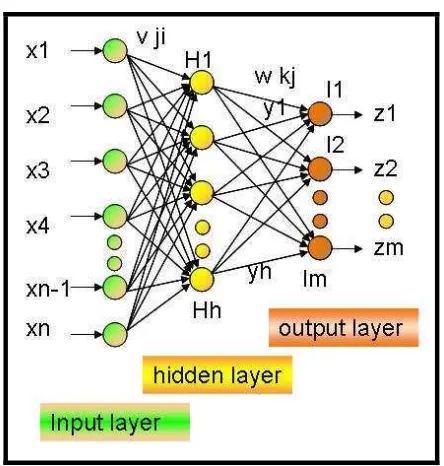
Jaringan Syaraf Tiruan merupakan sebuah model sistem komputasi yang bekerja seperti syaraf biologis pada saat berhubungan dengan dunia luar. Jaringan Syaraf Tiruan terdiri dari neuron elemen penghitung dalam jumlah banyak dan saling terhubungkan serta mempunyai kemampuan untuk merespon input atau masukan dan belajar beradaptasi dengan lingkungannya (Patterson 1996). Proses pembelajaran atau learning dari Jaringan Syaraf Tiruan (JST) dengan perubahan pada tingkat hubungan antar neuron, yaitu pada faktor pembobotnya selama proses belajar di mana nilai-nilai faktor pembobot yang dihasilkan akan ditetapkan dan digunakan sebagai faktor pembobot terpakai. Secara sederhana bentuk JST oleh Patterson (1996) diilustrasikan pada Gambar 5.
Modifikasi dari nilai faktor pembobot dilakukan secara sistematis dengan menggunakan aturan belajar (learning rule), yang secara umum prosedur proses pembelajaran dikelompokkan menjadi lima, yaitu :
a. Pembelajaran tanpa pengawasan (unsupervised learning)
Gambar 5 Ilustrasi sederhana Jaringan Syaraf Tiruan (JST)
b. Pembelajaran dengan pengawasan (supervised learning)
Proses pembelajaran Jaringan Syaraf Tiruan dilakukan dengan memberikan beberapa data input-output. Data-data ini dinamakan dengan data latihan (training data set), di mana modifikasi dari nilai-nilai faktor pembobot dimaksudkan agar output dari Jaringan Syaraf Tiruan dapat sesuai dengan
output dari datanya sehingga akan menghasilkan nilai minimum dari kesalahan (mean square error/MSE) antara output model JST dengan output data.
c. Pembelajaran dengan nilai
Proses pembelajaran ini secara prinsip sama dengan prosedur pembelajaran dengan pengawasan, tetapi dalam pembelajaran ini target pencapaian
outputnya dievaluasi dengan nilai atau score untuk mengukur seberapa dekat
output model dengan output pengamatan. Proses ini banyak digunakan dalam problem controlling dan optimasi di mana dijumpai kesulitan dalam memperoleh respon atau output yang tepat.
d. Pembelajaran gabungan (hybrid learning)
e. Pembelajaran Non adaptive
Pada proses ini tidak dilakukan modifikasi terhadap nilai faktor pembobot. Dengan menggunakan fungsi energi maka faktor pembobotnya tetap hanya selama proses pembelajaran modifikasi dilakukan terhadap status node-nodenya sampai diperoleh fungsi yang steady state.
Dalam hubungannya dengan proses pembelajaran (pelatihan) untuk mendapatkan penyelesaian yang cepat dari JST, dilakukan dengan menggunakan algoritma backpropagation, yang efektif untuk memecahkan berbagai permasalahan diantaranya mengidentifikasi mutu buah dengan citra digital (Arham 2003), memprediksi pengaruh tinggi dan lebar kemudi traktor tangan terhadap beban kerja (Akbar dan Herodian 2004), klasifikasi data (Suprayogi 2003), peramalan dan pemecahan masalah kombinatorial seperti peramalan penjualan (sales forecasting), proses kontrol, riset pelanggan, validasi data, manajemen resiko serta target penjualan (Stergiou 1996). Selain itu, Jaringan Syaraf Tiruan mampu untuk memecahkan permasalahan di mana hubungan antara masukan (input) dan keluaran (output) tidak diketahui dengan jelas (Yang et al. 1998).
Beberapa keuntungan menggunakan Jaringan Syaraf Tiruan oleh Stergiou (1996) dijelaskan sebagai berikut :
- Mempunyai kemampuan untuk mempelajari bagaimana basis data yang diberikan untuk pelatihan (adaptive learning)
- JST dapat mengorganisasi secara mandiri dan menampilkan informasi yang diterima selama waktu pembelajaran (self organisation).
- Toleransi kesalahan disampaikan melalui kode informasi.
2.5.1 Pembelajaran Metode Back Propagation
Data sampel hasil pengukuran digunakan sebagai bahan pada proses pembelajaran (training), dengan menggunakan metode back propagation
(Patterson 1996). Mekanisme pembelajaran dilakukan melalui ilustrasi seperti pada Gambar 8 serta tahapan dan persamaan berikut ini :
- Input pada lapisan masukan merupakan input untuk lapisan tersembunyi
∑
=
=
ii
j
h
x
Vij
m
k
y
W
I
kj ji
k
=
∑
=
1
,
2
,
...
... 5dimana :
j
H
= input pada lapisan tersembunyi node jk
I
= input pada lapisan keluaran (output) node kh = jumlah node pada lapisan tersembunyi
m = jumlah node pada lapisan keluaran (output)
- Perhitungan nilai output node j pada lapisan tersembunyi dan output node k
pada lapisan keluaran dengan persamaan berikut :
k
j
H
f
y
j=
(
j)
=
1
,
2
,
....
... 6m
k
I
f
zk
=
(
k)
=
1
,
2
,
....
... 7sehingga persamaan keseluruhan output pada lapisan keluaran ke k dengan masukan nilai input x adalah :
))
(
(
)
(
)
(
j kj j j kj j k kH
f
W
f
y
W
f
I
f
z
∑
∑
=
=
=
))
(
(
ji ii kj j
x
V
f
W
f
∑
∑
=
... 8fungsi (f) yang digunakan pada proses pembelajaran merupakan fungsi aktivasi
log-sigmoid :
) ( 1 1 ) ( j H j e H
f −β
+ =
= ... 9
) ( 1 1 ) ( j I k e I
f −β
+ =
= ... 10
dimana :
β
= konstanta fungsi sigmoidperbaikan nilai pembobot dengan membandingkan nilai output jaringan dengan nilai target yang diberikan dengan menggunakan persamaan jumlah kuadrat galat, yaitu :
∑
−
=
2)
(
2
1
p k p kz
t
E
... 11dimana :
t
= targetz
= keluaran JST- Perbaikan nilai pembobot dilakukan untuk memperkecil nilai galat dengan menggunakan metode delta rule :
j k
kj
y
W
=
ηδ
Δ
... 12dimana :
η
= konstanta laju pembelajarankj
W
Δ
= perubahan nilai pembobotW
kjk
δ
= galat output ke kj
y
= fungsi log-sigmoidi j
ji
x
V
=
ηδ
Δ
... 13Dari persamaan-persamaan di atas maka nilai pembobot dapat dirumuskan melalui persamaan berikut :
) ( ) ( ' k k k j lama kj kj lama kj baru
kj W W W y t z f I
W = +Δ = +
η
− ... 14kj k k j j lama ji ji lama ji baru
ji V V V x f H W
Gambar 6 Ilustrasi Pembelajaran Backpropagation
- Semua proses di atas di lakukan secara berulang-ulang melalui pemberian nilai input-output, proses aktivasi dan perubahan nilai pembobot. Kinerja jaringan dievaluasi melalui nilai Root Mean Square Error (RMSE), hal ini gunanya untuk melihat tingkat ketelitian yang telah dibangun.
n T Z Error
RMS =
∑
k − k 2 ) (... 16
dimana :
k
Y
= nilai prediksi jaringank
T
= nilai target yang diberikan pada jaringann = jumlah contoh pada data set validasi
)
(
)
(
min 0 max 0 minZ
Z
Z
X
X
i baru ilama i−
−
=
... 17Pada nilai data output dinormalisasi kedalam selang 0.2 - 0.8. Persamaan normalisasi data output target adalah sebagai berikut:
2
.
0
)
(
)
(
6
.
0
min 0 max 0 min 0 0+
−
−
∗
=
Z
Z
Z
Z
Z
o baru lama ... 182.5.2 Validasi Jaringan Syaraf Tiruan (JST)
Training model dilakukan untuk melihat hasil ketelitian pada proses pembelajaran JST, sedangkan t