PERANCANGAN PERANGKAT LUNAK PENDETEKSI GEMPA BUMI DENGAN
MEMANFAATKAN PRINSIP AYUNAN BANDUL DENGAN BAHASA ASEMBLY
ASM 51
TUGAS AKHIR
ASTINI WATI SIMANJUNTAK
102408006
PROGRAM STUDI D3 FISIKA
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
PERSETUJUAN
Judul :PERANCANGAN PERANGKAT LUNAK PENDETEKSI GEMPA BUMI DENGAN MEMANFAATKAN PRINSIP AYUNAN BANDUL DENGAN BAHASA ASEMBLY ASM 51
Kategori : TUGAS AKHIR
Nama : ASTINI WATI SIMANJUNTAK
No.Induk Mahasiswa : 102408006
Program Studi : D3 FISIKA
Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM (FMIPA)
UNIVERSITAS SUMATERA UTARA.
Diluluskan di
Medan, 28 Agustus 2013
Diketahui/ Disetujui oleh
Ketua Program Studi D3 Fisika Pembimbing
(Dr.Susilawati M.Si) (Dr. Bisman Perangin-angin, M. Eng, Sc)
PERNYATAAN
PERANCANGAN PERANGKAT LUNAK PENDETEKSI GEMPA BUMI DENGAN
MEMANFAATKAN PRINSIP AYUNAN BANDUL DENGAN BAHASA ASEMBLY
ASM 51
TUGAS AKHIR
Saya mengakui bahwa Laporan Tugas Akhir ini adalah hasil kerja saya sendiri, kecuali
beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 28 Agustus 2013
Astini wati Simanjuntak
PENGHARGAAN
Atas berkat anugerah tuhan Yang Maha Esa penulis mengucapakan Puji dan syukur
kepada-nya atas segala kasih dan karunia-Nya yang telah dilimpahkan kepada penulis,
sehingga penulis dapat melaksanakan proyek yang berjudul “PERANCANGAN
PERANGKAT LUNAK PENDETEKSI GEMPA BUMI DENGAN MEMANFAATKAN
PRINSIP AYUNAN BANDUL DENGAN BAHASA ASEMBLY ASM 51”
Sesuai kurikulum yang berlaku di Universitas Sumatera Utara, bahwa setiap
mahasiswa D-III Fisika Instrumentasi harus melaksanakan sebuah tugas akhir disemester VI.
Adapun tujuan diadakannya tugas akhir ini adalah ntuk pengembangan pemahaman dan
pengaplikasiannya dengan ilmu yang diperoleh dibangku kuliah. Tugas akhir ini juga
merupakan alah satu syrat untuk memperoeh gelar Ahlimadya dijurusan Fisika Instrumentasi
Fakultas matematika Dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
Dengan selesainya tugas akhir yang saya laksanakan, saya tidak lupa mengucapkan terima
kasih banyak terhadap :
1. Bapak Dr. Marhaposan Situmorang selaku ketua departemen Fisika, Fakultas
Matematika dan Ilmu Pengetahuan Alam, Universitas Sumatera Utara.
2. Ibu Dr. Susilawati, M.si selaku ketua Program Studi D-III Fisika Instrumentasi
3. Bapak Dr.Bisman Perangin-angin, M. Eng, Sc selaku dosen pembingbing yag telah
banyak membeikan bimbingan dan arahan selama pelaksanaan tugas akhir ini.
4. Bapak Dr. Sutarman, M, Sc selaku dekan Fakultas Matematika dan Ilmu Pengetahuan
Alam, Universitas Sumatera Utara.
5. Seluruh staf pengajar dan staf pegawai administrasi di lingkungan departemen Fisika
Instrumentasi, Fakultas Matematika dan Ilmu Pengetahuan Alam, universitas
6. Orangtua penulis yang telah banyak mendidik, berdoa dan berkorban baik secara
moril maupun materil kepada penulis.
7. Kak Irma Girsang yang selalu membantu dan memberi penulis motivasi dalam
menyelesaikan perancangan tugas akhir ini sehingga dapat diselesaikan dengan baik.
8. Bang Prandani Sidabutar dan Bang Okto gultom yang selalu memberi motivasi dalam
menyelesaikan tugas akhir ini sehingga dapat selesau dengan baik.
9. Rekan-rekan mahasiswa/I Fisika Instrumentasi yang telah banyak memberikan
dukungan khususnya stambuk 2010.
Penulis menyadari bahwa didalam penyusunan laporan ini masih banyak
kekurangan-kekurangan. Untuk itu,penulis mengharapkan saran dan kritik dari pembaca yang sifatnya
membangun demi penyempurnaan tugas akhir ini.
Akhir kata penulis mengucapkan terima kasihkepada semua pihak, semoga Tugas
Akhir ini berguna bagi kita semua.
Medan, Agustus 2013
ABSTRAK
DAFTAR ISI
1.1Latar Belakang Masalah... 1
1.2Rumusan Masalah ... 2
1.3Tujuan Penulisan... 2
1.4Batasan Masalah... 2
1.5Manfaat Penelitian………... 3
1.6Sistematika Penulisan………... 3
BAB II. LANDASAN TEORI……… 5
2.1 Transduser dan Sensor……… 5
2.1.1Photodioda……….……… 5
2.2 Dioda Pemancar Cahaya Inframerah (LED Inframerah)…… 7
2.3 LED Inframerah………..…………... 7
2.4 Transistor ………... 8
2.4.1 Transistor Sambungan Bipolar……….………. 8
2.4.2 Jenis-Jenis Transistor………... 10
2.5 Sirene (Buzzer)……….... 11
2.6 Mikrokontroler AT89S51………... 13
2.6.1 Konstruksi AT89S51……..……….. 14
2.7 Perangkat Lunak……….. 18
2.7.1 Pemograman bahasa asembly untuk IC AT89S51 ……... 18
BAB III.PERANCANGAN ALAT DAN PROGRAM………..………. 23
3.1. Diagram Blok Sistem……… 23
3.2 Catu daya ... 24
3.4 Rangkaian Mikrokontroler AT89S51………. 26
3.5 Rangkaian Penguat Arus……… 27
3.6 LCD (Liquid Cristal Display)... 29
3.7 Perancangan Perangkat Lunak Sistem... 34
3.8 Diagram alir Program... 47
BAB IV. PENGUJIAN RANGKAIAN DAN ANALISAPROGRAM… 49 4.1. Pengujian Rangkaian ………..……….. 49
4.1.1 Pengujian Data Mikrokontroler AT89S51... 49
4.1.2. Pengujian Rangkaian Mikrokontroler AT89S51……… 51
4.1.3 Pengujian Rangkaian Penerima Infra merah... 54
4.1.4 Rangkaian Penguat arus……… 56
4.1.5 Pengujian rangkaian Keseluruhan………... 57
4.1.6 Spesifikasi Alat………. 58
BAB V. KESIMPULAN DAN SARAN……… 59
5.1 Kesimpulan……… 59
5.2 Saran……….. 59
DAFTAR PUSTAKA
DAFTAR TABEL
Halaman
Tabel 2.1 Port 3 (Pin 10-17)... 18
DAFTAR GAMBAR
halaman
Gambar 2.1 Photodioda……….. ... 6
Gambar 2.2 Simbol Transistor dan Berbagai tipe ... 10
Gambar 2.3 Rangkaian Buzzer... 12
Gambar 2.4 IC Mikrokontroler AT89S51 ……... 16
Gambar 3.1 Diagram Blok Sistem ... 23
Gambar 3.2 Transistor sebagai penguat pada buzzer ... 28
Gambar 3.3 Diagram alir flowchart………..………... 47
ABSTRAK
BAB 1
PENDAHULUAN
1.1Latar Belakang Masalah
Kebutuhan manusia terhadap peralatan yang cerdas dan dapat bekerja secara otomatis
semakin meningkat, sehingga peralatan-peralatan otomatis ini sedikit demi sedikit mulai
menggantikan peralatan manual. Selain sistem kerjanya yang sama, peralatan otomatis dapat
melakukan pekerjaannya sendiri tanpa harus dikendalikan oleh pengguna.
Untuk merancang sebuahperalatan yang cerdas dan dapat bekerja secara otomatis tersebut,
dibutuhkansebuah alat atau komponen yang dapat menghitung, mengingat, dan mengambil
pilihan. Kemampuan dimiliki oleh sebuah komputr (PC), namun tidaklah efisien jika harus
menggunakan komutter hanya untuk keperluan tersebut diatas. Untuk itu komputer dapat
digantikan dengan sebuah mikrokontroler. Mikrokontroler merupakan sebuah chip atau IC
yang didalamnya terdapat sebuah pprosesor dan flash memori yang dapat dibaca/tulis sampai
1000 kali, sehingga biaya pengembangan menjadi murah karrena dapat dihapus kemudian
diisi kembali dengan program lain sesuai dengan kebutuhan.
Salah satu alat otomatis yang diperlukan ketika terjadi bencana alam adalah alarm
gempa bumi. Alat ini bekerja secara otomatis dengan menggunakan metode ayunan bandul.
Jadi disini tidak perlu ditakutkan lagi terjadi ggempa terutama dimalam hari saat kita sedang
dalam keadaan tidurkita cukup menggunakan alarm gempa bumi.
Atas dasar pemikiran diatas, akan dirancang sebuah alat yaitu alarm gempa bumi
dengan metode ayunan bandulyang dapat mengetahui adanya gempa bumi, sehingga ini akan
1.2Rumusan Masalah
Berdasarkan uraian diatas, penulis tertarik untuk mengangkat permasalahan tersebut kedalam
bentuk skripsi sebagai Tugas Akhir dengan judul “Perancangan Perangkat Lunak
Pendeteksi Gempa bumi Dengan Memanfaatkkan Prinsip Ayunan Dengan Bahasa
asembly ASM 51”
Pada rangkaian ini akan digunakan mikrokontroler AT89S51 yang akan menentukan alamat
memori program yang akan dibaca, dan melakukan proses baca data di memori. Data yang
akan dibaca menggunakan instruksi dari program yang digunakan. Maka untuk membaca
instruksi tersebut dapat digunakan program bahasa asembly ASM 51.
1.3Tujuan Penulisan
Tujuan dilakukan Tugas Akhir ini adalah sebagai berikut:
1. Memanfaatkan mikrokontroler sebagai pusat kendali dari sebuah sistem yang cerdas
2. Memanfaatkan inframerah sebagai pemancar dan photodioda sebagai penerima
3. Memanfaatkan program bahasa asembly ASM 51 untuk melakukan pemograman
(proses baca data) pada mikrokontroler yang digunakan.
1.4Batasan Masalah
Mengacu pada hal diatas, kami membuat alat yang dapat mendeteksi gempa bumi dengan
metode ayunan bandul dengan batasan-batasan sebagai berikut:
1. Mikrokontroler yang digunakan adalah jenis AT89S51
2. Sensor yang digunakan adalah sensor inframerah sebagai pemancar dan photodioda
sebagai penerima.
3. Sebuah bandul yang digunakan untuk mengetahui adanya gempa yang akan merubah
1.5Manfaat Penelitian
Manfaat penelitian rancangan alat ini adalah untuk memonitoring suatu tempat yang
sering mengalami getaran gempa seperti rumah, perkantoran, perhotelan, supermarket, dll.
1.6Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematika
pembahasan bagaimana sebenarnya prinsip kerja dari alat yang menggunakan bandul untuk
mengetahui adanya gempa.
BAB I PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang masalah, rumusan masalah, tujuan
penulisan, batasan masalah, manfaat penelitian, dan sistematika penulisan.
BAB II LANDASAN TEORI
Dalam bab ini berisi tentang teori dasar yang perlu diketahui untuk mempermudah
dalam pemahaman prinsip kerja dari rangkaian pada sistem.
BAB III PERANCANGAN DAN SISTEM KERJA RANGKAIAN
Pada bab ini akan akan dibahas perancangan dan sistem kerja rangkaian, diagram blok
.
BAB IV PENGUJIAN ALAT DAN PROGRAM
Pada bab ini berisi tentang pengujian sistem dan analisa rangkaian dari system alat
BAB V KESIMPULAN DAN SARAN
Bab ini merupakan penutup yang berisi tentang kesimpulan dari pembahasan yang
BAB II
LANDASAN TEORI
2.1 Transduser dan Sensor
Transducer adalah alat yang mengubah energy dari satu bentuk ke bentuk yang lain.
Transducer dapat dibagi menjadi dua bagian yaitu trasducer input dan transducer output.
Transducer input listrik mengubah energy non listrik,misalnya suara atau sinar menjadi
tebnaga listrik. Transducer output listrik bekerja pada urutan sebaliknya. Transducer output
listrik mengubah energy listrik pada bentuk energy non listrik.
Sensor adalah alat yang digunakan untuk mendeteksi dan sering berfungsi untuk
mengukur magnitude sesuatu. Sensor adalah jenis transducer yang digunakan untuk
mengubah variasi mekanis, magnetis, panas, sinar, dan kimia menjadi tegangan arus listrik.
Sensor biasanya dikategorikan melalui pengukur dan memegang peranan penting dalam
pengendalian proses pabrikasi modern. Sensor memberikan ekivalen mata, pendengaran,
hidung, dan lidah untuk menjadi otak mikroprosesor dari system otomatisasi industry. Sensor
yang digunakan pada perancangan ini adalah sensor inframerah.
2.1.1. Photodioda
Potodioda biasanya digunakan untuk mendeteksi cahaya. Potodioda adalah piranti
semikonduktor yang mengandung sambungan p-n, dan biasanya terdapat lapisan intrinsik
antara lapisan n dan p. Piranti yang memiliki lapisan intrinsik disebut p-i-n atau PIN
potodioda. Cahaya diserap di daerah pengambungan atau daerah intrinsik menimbulkan
pasangan elektron-hole, kebanyakan pasangan tersebut menghasilkan arus yang berasal dari
cahaya.
Mode operasi
1. Mode potovoltaik: seperti solar sel, penyerapan pada potodioda menghasilkan
tegangan yang dapat diukur. Bagaimanapun, tegangan yang dihasilkan dari tenaga
cahaya ini sedikit tidak linier, dan range perubahannya sangat kecil
2. Mode potokonduktivitas : disini, potodioda diaplikasikan sebagai tegangan revers
(tegangan balik) dari sebuah dioda (yaitu tegangan pada arah tersebut pada dioda tidak
akan menhantarkan tanpa terkena cahaya) dan pengukuran menghasilkan arus poto. (
hal ini juga bagus untuk mengaplikasikan tegangan mendekati nol). Ketergantungan
arus poto pada kekuatan cahaya dapat sangat linier
Karakteristik bahan potodioda:
1. Silikon (Si) : arus lemah saat gelap, kecepatan tinggi, sensitivitas yang bagus antara
400 nm sampai 1000 nm ( terbaik antara 800 sampai 900 nm).
2. Germanium (Ge): arus tinggi saat gelap, kecepatan lambat, sensitivitas baik antara 600
nm sampai 1800 nm (terbaik 1400 sampai 1500 nm).
3. Indium Gallium Arsenida (InGaAs): mahal, arus kecil saat gelap, kecepatan tinggi
sensitivitas baik pada jarak 800 sampai 1700nm (terbaik antara 1300 sampai 1600nm).
Gambar Photodioda ditunjukkan pada gambar berikut:
2.2 Dioda Pemancar Cahaya Infra Merah (LED infra Merah)
LED adalah dioda yang menghasilkan cahaya saat diberi energy listrik. Dalam bias
maju sambungan p-n terdapat rekombinasi antara elektron bebas dan lubang (hole). Energi ini tidak seluruhnya diubah kedalam bentuk energi cahaya atau photon melainkan dalam
bentuk panas sebagian. Proses pemancara cahaya akibat adanya energi listrik yang diberikan
terhadap suatu bahan disebut dengan sifat elektroluminesensi. Material lain misalnya Galium
Arsenida Pospat (GaAsP) atau Galium Pospat (GaP): photon energi cahaya dipancarkan
untuk menghasilkan cahaya tampak. Jenis lain dari LED digunakan untuk menghasilkan energi
tidak tampak seperti yang dipancarkan oleh pemancar laser atau inframerah.
Pemancar inframerah adalah dioda solid state yang terbuat dari bahan Galium Arsenida (GaAs) yang mampu memancarkan fluks cahaya ketika dioda ini dibias maju. Bila diberi bias
maju elektron dari daerah-n akan menutup lubang elektron yang ada didaerah-p. Selama proses rekombinasi ini, energi dipancar keluar dari permukaan p dan n dalam bentuk photon. Photon-photon yang dihasilkan ini ada yang diserap lagi dan ada yang meninggalkan permukaan dalam
betuk radiasi energi.
2.3 LED Infra Merah
Beberapa ragam indikator status LED yang tampak (visible) adalah merah, hijau, kuning. Selain itu juga terdapat LED dengan cahaya tak tampak (invisible) seperti LED infra merah. Infra merah adalah sinar dengan panjang gelombang ( ) lebih besar dari 800 nm dan
tidak dapat dilihat oleh mata.
LED dengan cahaya tidak tampak (Invisible) banyak digunakan dalam proses film dan dalam sistem keamanan. LED infra merah digunakan ketika diperlukan daya penekanan
optis yang tinggi. LED ini mempunyai intensitas sinar lebih besar dibanding LED
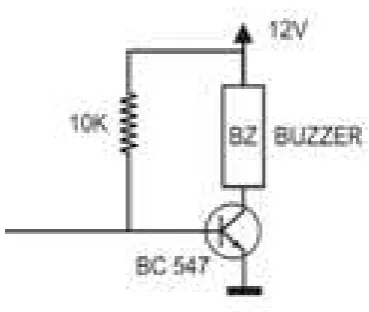
Rangkaian sensor infra merah menggunakan foto transistor dan led infra merah yang
dihubungkan secara optik. Fototransistor akan aktif apabila terkena cahaya dari led infra
merah. Antara Led dan foto transistor dipisahkan oleh jarak. Jauh dekatnya jarak
memengaruhi besar intensitas cahaya yang diterima oleh foto transistor. Apabila antara Led
dan foto transistor tidak terhalang oleh benda, maka foto transistor akan aktif. Transistor BC
547 akan tidak aktif karena tidak ada arus yang mengalir ke basis transistor BC 547 Karena
transistor tersebut tidak aktif, maka tidak ada arus yang mengalir dari kolektor ke emitor.
Infra merah (infra red) ialah sinar elektromagnet yang panjang gelombangnya lebih
daripada cahaya nampak yaitu di antara 700 nm dan 1 mm. Sinar infra merah merupakan
cahaya yang tidak tampak. Jika dilihat dengan dengan spektroskop cahaya maka radiasi
cahaya infra merah akan nampak pada spectrum elektromagnet dengan panjang gelombang di
atas panjang gelombang cahaya merah. Dengan panjang gelombang ini maka cahaya infra
merah ini akan tidak tampak oleh mata namun radiasi panas yang ditimbulkannya masih
terasa/dideteksi.
2.4 Transistor
Transistor adalah komponen semikonduktor yang mempunyai tiga kaki atau lebih
sehingga daya dapat diperkuat. Fungsi transistor sebagai penguat atau amplifier dari sinyal
listrik, tahanan variabel atau sebagai saklar.
2.4.1 Transistor Sambungan Bipolar
Banyak sistem elektronik yang sangat tergantung pada kemampuan transistor untuk
bertindak sebagai saklar. Transistor yang digunakan sebagai saklar mempunyai keuntungan
kecepatan yang sangat tinggi, memerlukan tegangan dan arus penggerak yang sangat rendah
untuk memicu aksi penghubungan.
Emitor yang diberi banyak bahan campuran bertindak sebagai sumber utama dari arus
elektron. Basis dengan sedikit bahan campuran bertindak untuk mengontrol aliran arus. Pada
transistor NPN, kolektor diberi dengan bahan yang cukup dan menerima sebagian besar
elektron dari emitor. Arus pada ujung basis disebut arus basis menentukan jumlah arus
kolektor. Dengan tidak adanya arus basis tidak ada arus kolektor(normally OFF). Gain arus
adalah perbandingan arus kolektor terdapat arus basis. Transistor sambungan bipolar
mempunyai dua variabel: NPN, aksi dari masing-masing adalah sama tetapi polaritasnya
terbalik.
Dari banyak tipe-tipe transistor modern, pada awalnya ada dua tipe dasar transistor, bipolar
junction transistor (BJT atau transistor bipolar) dan field-effect transistor (FET), yang
masing-masing bekerja secara berbeda.
Transistor bipolar dinamakan demikian karena kanal konduksi utamanya menggunakan dua
polaritas pembawa muatan: elektron dan lubang, untuk membawa arus listrik. Dalam BJT,
arus listrik utama harus melewati satu daerah/lapisan pembatas dinamakan depletion zone,
dan ketebalan lapisan ini dapat diatur dengan kecepatan tinggi dengan tujuan untuk mengatur
aliran arus utama tersebut.
FET (juga dinamakan transistor unipolar) hanya menggunakan satu jenis pembawa muatan
(elektron atau hole, tergantung dari tipe FET). Dalam FET, arus listrik utama mengalir dalam
satu kanal konduksi sempit dengan depletion zone di kedua sisinya (dibandingkan dengan
transistor bipolar dimana daerah Basis memotong arah arus listrik utama). Dan ketebalan dari
mengubah ketebalan kanal konduksi tersebut. Lihat artikel untuk masing-masing tipe untuk
penjelasan yang lebih lanjut.
Simbol sirkit kedua jenis transistor itu hampir sama. Perbedaannya terletak pada arah panah di
ujung emitter. Seperti yang telah diketahui, arah panah ini menunjukkan arah aliran arus
konvensional yang berlawanan arah dalam ke dua jenis tadi tetapi selalu dari bahan jenis p ke
jenis n dalam sirkit emitter dasar. Untuk menghindarkan kesalahan, transistor yang
dibicarakan disini selalu n p n, kecuali bahwa polaritas tegangan suplai pada sirkit yang
memakai transistor jenis p n p terbalik dan arus yang mengalir berlawanan dengan sirkit yang
memakai transistor n p n.
2.4.2 Jenis-Jenis Transistor
PNP P-channel
NPN N-channel
BJT JFET
Gambar 2.2 Simbol Transistor dari Berbagai Tipe
Secara umum, transistor dapat dibeda-bedakan berdasarkan banyak kategori:
1. Materi semikonduktor: Germanium, Silikon, Gallium Arsenide
2. Kemasan fisik: Through Hole Metal, Through Hole Plastic, Surface Mount, IC, dan
3. Tipe: UJT, BJT, JFET, IGFET (MOSFET), IGBT, HBT, MISFET, VMOSFET,
MESFET, HEMT, SCR serta pengembangan dari transistor yaitu IC (Integrated Circuit) dan lain-lain.
4. Polaritas: NPN atau N-channel, PNP atau P-channel
5. Maximum kapasitas daya: Low Power, Medium Power, High Power
6. Maximum frekuensi kerja: Low, Medium, atau High Frequency, RF transistor,
Microwave, dan lain-lain
7. Aplikasi: Amplifier, Saklar, General Purpose, Audio, Tegangan Tinggi, dan lain-lain
2.5 Sirene (Buzzer)
Pengertian buzzer adalah alat penderu (sirene) atau suatu alat penggetar yang
menggunakan sumber arus listrik untuk menghasilkan bunyi menderu terus menerus. Sirene
tersusun atas sebuah piringan yang diberi lubang dengan jumlah berbeda pada setiap
jari-jarinya, kemudian diputar dengan cepat. Pada rangkaian ini digunakan transistor sebagai
penguat arus yang dimana penguat ini berfungsi untuk menguatkan arus pada buzzer yaitu
jika arus mengalir maka buzzer akan mengeluarkan bunyi, dan sebaliknnya jika tidak ada arus
Gambar 2.3 gambar rangkaian Buzzer
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran
listrik menjadi getaran suara. Pada dasarnya prinsip kerja buzzer hampir sama dengan loud
speaker, jadi buzzer juga terdiri dari kumparan yang terpasang pada diafragma dan kemudian
kumparan tersebut dialiri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik
ke dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan
dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma
secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara. Buzzer
biasa digunakan sebagai indikator bahwa proses telah selesai atau terjadi suatu kesalahan pada
sebuah alat (alarm).
Definisi buzzer atau pengertian buzzer adalah alat penderu (sirene) atau suatu alat
penggetar yang menggunakan sumber arus listrik untuk menghasilkan bunyi menderu terus
menerus. Sirene tersusun atas sebuah piringan yang diberi lubang dengan jumlah berbeda
pada setiap jari-jarinya, kemudian diputar dengan cepat. Pada saat piringan itu berputar,
diembuskan udara dengan compressor ke arah lubang secara bergantian sehingga terdengar
bunyi yang menderu terus menerus dengan suara yang bergantian pula. Buzzer bisa
digunakan untuk membangun viral awareness, yang sangat didambakan oleh para pemilik brand saat ini, entah itu personal brand atau corporate brand. Personal brand berupa sosok
politikus, dan sebagainya. Sementara corporate brand ialah perusahaan yang ingin mereknya
makin dikenal dan akhirnya digunakan masyarakat. Syarat menjadi buzzer ialah memiliki
pemahaman mengenai produk dan target audiens yang dibidik.
2.6 Mikrokontroler AT89S51
Mikrokontroler sebagai suatu terobosan teknologi mikrokontoler dan mikrokomputer,
hadir memenuhi kebutuhan pasar (market need) dan teknologi baru. Sebagai teknologi baru,
yaitu teknologi semikonduktor dengan kandungan transistor yang lebih banyak namun hanya
membutuhkan ruang kecil serta dapat diproduksi secara missal (dalam jumlah banyak)
sehingga harga menjadi lebih murah (dibandingkan mikroprosesor). Sebagai kebetuhan pasar,
mikrokontelor hadir untuk memenuhi selera industri dan para konsumen akan kebutuhan dan
keinginan alat-alat Bantu dan mainan yang lebih canggih.
Ilustrasi yang mungkin bisa memberikan gambaran yang jelas dalam penggunaan
mikrokontroler adalah aplikasi mesin tiket dalam arena permainan yang saat ini terkenal di
Indonesia. Jika kita sudah selesai bermain, maka akan diberikan suatu nilai, nilai inilah yang
menentukan berapa jumlah tiket yang bisa diperoleh dan jika dikumpulkan dapat ditukar
dengan berbagai macam hadiah. Sistem tiket ini ditangani dengan mikrokontroler, karena
tidak mungkin menggunakan komputer PC yang harus dipasang disamping (atau di belakang)
mesin permainan yang bersangkutan.
Selain system tiket, kita juga dapat menjumpai aplikasi mikrokontroler dalam bidang
pengukuran jarak jauh atau ynag dikenal dengan system telemetri. Misalnya pengukuran
disuatu tempat yang membahayakan manusia, maka akan lebih nyaman jika dipasang suatu
system pengukuran yang bisa mengirimkan data lewat pemancar dan diterima oleh stasiun
pengamatan dari jarak yang cukup aman dari sumbernya. Sistem pengukuran jarak jauh ini
jelas membutuhkan suatu system akuisisi data sekaligus system pengiriman data secara serial
Tidak seperti system komputer, yang mampu menangani berbagai macam program aplikasi
(misalnya pengolah kata, pengolah angka dan lain sebagainya), mikrokontroler hanya bisa
digunakan untuk satu aplikasi tertentu saja. Perbedaan lainnya terletak pada perbandingan
RAM-nya dan ROM. Pada system computer perbandingan RAM dan ROM-nya besar, artinya
program-program pengguna disimpan dalam ruang RAM yang relative besar, sedangkan
rutin-rutin antarmuka perangkat keras disimpan dalam ruang ROM yang kecil. Sedangkan
pada mikrokontroler, perbandingan ROM dan RAM-nya yang besar artinya program control
disimpan dalam ROM (bisa Masked ROM atau Flash PEROM) yang ukurannya relatif lebih
besar, sedangkan RAM digunakan sebagai tempat penyimpanan sementara, termasuk
register-register yang digunakan pada mikrokontroler yang bersangkutan.
2.6.1 Konstruksi AT89S51
Mikrokontroler AT89S51 hanya memerlukan tambahan 3 kapasitor, 1 resistor dan 1
kristal serta catu daya 5 Volt. Kapasitor 10 mikro-Farad dan resistor 10 Kilo Ohm dipakai
untuk membentuk rangkaian reset. Dengan adanya rangkaian reset ini AT89S51 otomatis
direset begitu rangkaian menerima catu daya. Kristal dengan frekuensi maksimum 24 MHz
dan kapasitor 30 piko-Farad dipakai untuk melengkapi rangkaian oscilator pembentuk clock
yang menentukan kecepatan kerja mikrokontroler.
Memori merupakan bagian yang sangat penting pada mikrokontroler. Mikrokontroler
memiliki dua macam memori yang sifatnya berbeda.
Read Only Memory (ROM) yang isinya tidak berubah meskipun IC kehilangan catu
daya. Sesuai dangan keperluannya, dalam susunan MCS-51 memori penyimpanan progam ini
dinamakan sebagai memori progam.
Random Access Memori (RAM) isinya akan sirna begitu IC kehilangan catu daya,
dipakai untuk menyimpan data pada saat progam bekerja. RAM yang dipakai untuk
Ada berbagai jenis ROM. Untuk mikrokontroler dengan progam yang sudah baku dan
diproduksi secara masal, progam diisikan ke dalam ROM pada saat IC mikrokontroler dicetak
di pabrik IC. Untuk keperluan tertentu mikrokontroler mengunakan ROM yang dapat diisi
ulang atau Programble-Eraseable ROM yang disingkat menjadi PEROM atau PROM. Dulu
banyak dipakai UV-EPROM (Ultra Violet Eraseable Progamble ROM) yang kemudian dinilai
mahal dan ditinggalkan setelah ada flash PEROM yang harganya jauh lebih murah.
Jenis memori yang dipakai untuk Memori Program AT89S51 adalah Flash PEROM,
program untuk mengendalikan mikrokontroler diisikan ke memori itu lewat bantuan alat yang
dinamakan sebagai AT89S51 Flash PEROM Programmer.
Memori Data yang disediakan dalam chip AT89S51 sebesar 128 byte, meskipun hanya kecil
Saja tapi untuk banyak keperluan memori kapasitas itu sudah cukup. Sarana Input/Ouput yang
disediakan cukup banyak dan bervariasa. AT89S51 mempunyai 32 jalur Input/Ouput. Jalur
Input/Ouput paralel dikenal sebagai Port 1 (P1.0..P1.7) dan Port 3 (P3.0..P3.5 dan P3.7).
AT89S51 dilengkapi UART (Universal Asyncronous Receiver/Transmiter) yang biasa dipakai untuk komunikasi data secara seri. Jalur untuk komunikasi data seri (RXD dan TXD)
diletakan berhimpitan dengan P1.0 dan P1.1 di kaki nomor 2 dan 3, seningga kalau sarana
input/ouput yang bekerja menurut fungsi waktu. Clock penggerak untaian pencacah ini bisa
berasal dari oscillator kristal atau clock yang diumpan dari luar lewat T0 dan T1. T0 dan T1
berhimpitan dengan P3.4 dan P3.5, sehingga P3.4 dan P3.5 tidak bisa dipakai untuk jalur
input/ouput parelel kalau T0 dan T1 dipakai.
AT89S51 mempunyai enam sumber pembangkit interupsi, dua diantaranya adalah
sinyal interupsi yang diumpankan ke kaki INT0 dan INT1. Kedua kaki ini berhimpitan
dengan P3.2 dan P3.3 sehingga tidak bisa dipakai sebagai jalur input/output parelel kalau
INT0 dan INT1 dipakai untuk menerima sinyal interupsi. Port1 dan 2, UART, Timer 0,Timer
1 dan sarana lainnya merupakan register yang secara fisik merupakan RAM khusus, yang
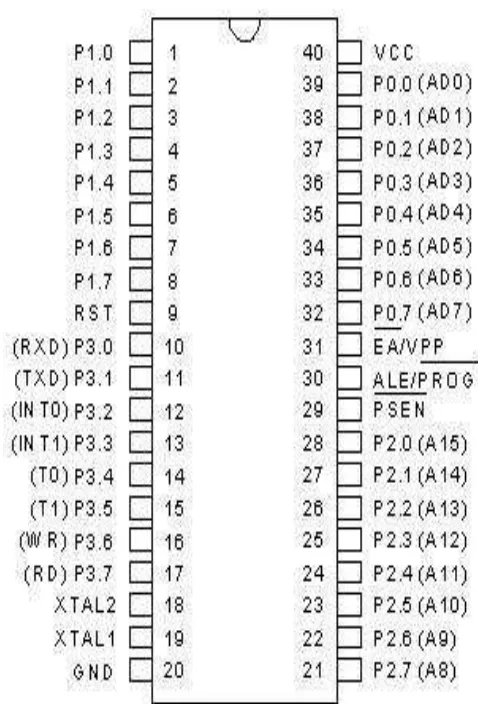
Gambar 2.4 IC Mikrokontroler AT89S51
Deskripsi pin-pin pada mikrokontroler AT89S51 :
VCC (Pin 40)
Suplai tegangan
GND (Pin 20)
Ground
Port 0 (pin 39 – pin 32 )
Port 0 dapat berfungsi sebagai I/O biasa, low order multiplex address/data ataupun
penerima kode byte pada saat flash progamming Pada fungsi sebagai I/O biasa port ini dapat
memberikan output sink ke delapan buah TTL input atau dapat diubah sebagai input dengan
Pada fungsi sebagai low order multiplex address/data, por ini akan mempunyai internal pull
up. Pada saat flash progamming diperlukan eksternal pull up, terutama pada saat verifikasi
program.
Port 1 ( pin 1 – pin 8 )
Port 1 disediakan sebagai port I/O dan berada pada pin 1-8. Beberapa pin pada port ini
memiliki fungsi khusus yaitu P1.5 (MOSI), P1.6 (SCK) yang digunakan untuk jalur download
program.
Port 2 ( pin 21 – pin 28 )
Port 2 berfungsi sebagai I/O biasa atau high order address, pada saatmengaksememori
secara 16 bit. Pada saat mengakses memori 8 bit, port ini akan mengeluarkan isi dari P2
special function register. Port ini mempunyai internal pull up dan berfungsi sebagai input
dengan memberikan logika 1. Sebagai output, port ini dapat memberikan output sink keempat
Buah input TTL.
Port 3 ( pin 10 – pin 17 )
Port 3 merupakan 8 bit port I/O dua arah dengan internal pullup. Port 3 juga
mempunyai fungsi pin masing-masing, yaitu sebagai berikut:
Nama Pin Fungsi
P3.0 (pin 10) RXD (Port input serial)
P3.1 (pin 11) TXD (Port output serial)
P3.2 (pin 12 ) INT 0 (interrupt 0 eksternal)
P3.3 (pin 13) INT 1(interrupt 1 eksternal )
P3.4 (pin 14) T0 (input eksternal timer 0)
P3.5 (pin 15) T1 (input eksternal timer 1)
P3.7 (pin 17) RD (untuk membaca eksternal data memori)
Tabel 2.1 Port 3 (Pin 10 – pin 17)
RST (pin 9)
Reset akan aktif dengan memberikan input high selama 2 cycle.
ALE/PROG (pin 30)
Address latch Enable adalah pulsa output untuk me-latch byte bawah dari alamat
selama mengakses memori eksternal. Selain itu, sebagai pulsa input progam (PROG) selama
Memprogram Flash.
PSEN (pin 29)
Progam store enable digunakan untuk mengakses memori progam eksternal.
EA (pin 31)
Pada kondisi low, pin ini akan berfungsi sebagai EA yaitu mikrokontroler akan menjalankan
progam yang ada pada memori eksternal setelah sistem direset. Jika kondisi high, pin ini akan
berfungsi untuk menjalankan progam yang ada pada memori internal. Pada saat flash
programming, pin ini akan mendapat tegangan 12 volt.
.XTAL1 (pin 19)
input untuk clock internal.
XTAL2 (pin 18)
Output dari osilator.
2.7 Perangkat Lunak
2.7.1 Pemrograman Bahasa Assembly untuk IC AT89S51
Mikrokontroler adalah sebuah chip yang dapat melakukan pemrosesan data secara
digital serta pengontrolan rangkaian elektronik sesuai dengan perintah bahasa assembly yang
mikroprosesor merupakan CPU tanpa memori dan I/O pendukung sebuah komputer,
sedangkan mikrokontroler terdiri dari CPU, memori, I/O dan unit pendukung lain seperti
ADC yang terintregrasi didalamnya. Penggunaan mikrokontroler menjadi modern pada desain
teknologi elektronika, karena chip ini dapat mereduksi sistem digital diskrit dengan perangkat
lunak yang diprogram dan disisipkan dalam chip tersebut. Mikroprosesor dikembangkan
kearah perangkat berbasis komputer sedangkan mikrokontroler lebih banyak ke sistem
instrumentasi elektronik.
Untuk berinteraksi dengan perangkat keras yang meliputi memberi perintah maupun
pengaturan perangkat dapat digunakan suatu bahasa pemrograman dasar tingkat rendah yaitu
bahasa pemrograman Assembly. Assembly merupakan bahasa dasar mesin, meskipun saat ini
telah banyak bahasa pemrograman tingkat tinggi yang lebih sederhana dan mudah dipahami
namun semua bahasa tersebut sesungguhnya juga merupakan pengembangan dari bahasa
assembly. Agar kita dapat menguasai lebih mendalam akan interaksi antara user (manusia)
dengan mesin maka pada kuliah microprosesor dan microkontroler di gunakan bahasa
assembly sebagai bahasa pemrograman sistem microkontroler. Pemograman yang dipakai
untuk membaca data pada rangkaian ini yaitu bahasa asembly ASM 51.
Secara fisik, kerja dari sebuah mikrokontroler dapat dijelaskan sebagai siklus
pembacaan instruksi yang tersimpan di dalam memori. Mikrokontroler menentukan alamat
dari memori program yang akan dibaca, dan melakukan proses baca data di memori. Data
yang dibaca diinterprestasikan sebagai instruksi. Alamat instruksi disimpan oleh
mikrokontroler di register, yang dikenal sebagai program counter. Instruksi ini misalnya
program aritmatika yang melibatkan 2 register.
Sarana yang ada dalam program assembly sangat minim, tidak seperti dalam bahasa
pemrograman tingkat atas (high level language programming) semuanya sudah siap pakai.
Penulis program assembly harus menentukan segalanya, menentukan letak program yang
memori-program, membuat variabel yang dipakai kerja dalam memori-data dan lain sebagainya.
Beberapa instruksi yang sering digunakan pada bahasa asembly untuk ASM-51 antara lain:
1. Intruksi pemindahan data ( MOV )
instruksi (MOV)
Instruksi ini merupakan perintah untuk memindahkan data dari satu tempat ke tempat
lain, atau juga digunakan untuk memindahkan data dari satu pin microcontroler ke pin
yang lain.
2. Instruksi lompatan
SJMP (Short Jump)
Instruksi ini merupakan perintah untuk melompat ke alamat untuk alamat kode yang
pendek.
AJMP (Absolut Jump)
Instruksi ini merupakan kebalikan dari perintah SJMP yaitu perintah untuk melompat
ke alamat kode yang jauh.
ACALL
Instruksi ini merupakan perintah untuk memanggil subrutin ke sebuah sub program
atau perintah ini juga dapat membuat logika menjadi 0.
RET (Return)
Instruksi ini merupakan perintah untuk menghentikan subrutin dan melanjutkan ke
instruksi berikutnya atau perintah untuk kembali kerutin pemanggil setelah instruksi
instruksi ini merupakan perintah untuk Mengosongkan atau mengubah alamat bit
dengan nilai 0
4. Instruksi lompatan bersyararat.
CJNE (Compare and Jump if Not Equal)
instruksi merupakan perintah untuk membandingkan nilai sebuah register dengan suatu
data atau register lain dan akan melompat ke alamat yang dituju jika belum sama
nilainya.
JB (Jump if Bit Set)
instruksi ini merupakan perintah untuk melakukan lompatan menurut isi (nilai) sebuah
bit. Yang di cari adalah nilai “1″ pada bit yang diamati nilainya. Jika bit bernilai “0″
akan melanjutkan instruksi berikutnya, namun jika bit bernilai “1″ akan melompat ke
alamat yang ditentukan.
JNB (Jump if Not Bit Set)
instruksi ini merupakan Kebalikan dari JB, yang dicari adalah nilai NOL (0) pada bit
yang dialamati.
DJNZ (Decrement and Jump if Not Zero)
instruksi ini merupakan perintah untuk mengurangi nilai sebuah register atau alamat
tertentu dengan nilai 1 dan jika hasilnya sudah NOL (0) maka instruksi selanjutnya
akan dijalankan.
5. Instruksi aritmatika
INC (Increment)
instruksi ini merupakan perintah untuk menambahkan “1″ angka dari register/data
yang dituju dan hasilnya disimpan pada register tersebut.
Menambahkan isi Akumulator dengan sebuah nilai dan hasilnya disimpan kembali
akumulator tersebut.
instruksi ini merupakan perintah untuk mengurangi “1″ angka dari register yang dituju
dan hasilnya disimpan pada register tersebut.
6. Instruksi geser
RR (Rotate Right)
Instruksi ini merupakan perintah untuk Menggeser ke kanan perbit isi akumulator.
RL (Rotate Left)
Instruksi ini merupakan perintah untuk menggeser ke kiri perbit isi akumulator
7. Jbc (Jump bit carry)
Instruksi ini merupakan perintah untuk lompat jika ada bit carry (C=1)
8. End
BAB III
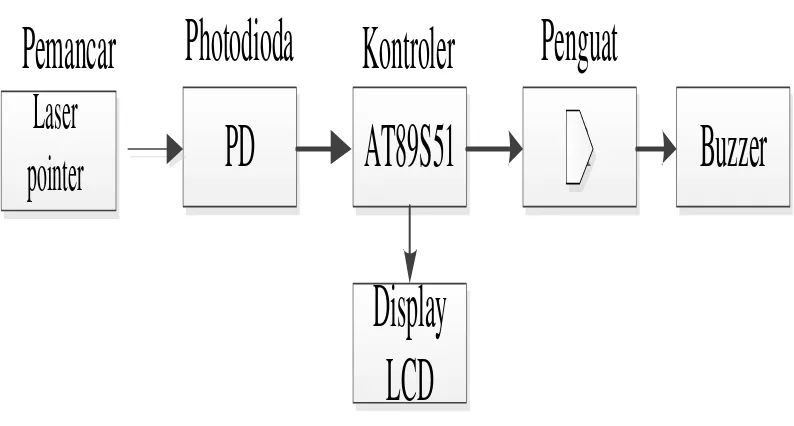
Gambar 3.1 Diagram Blok Sistem
Diagram blok diatas menggambarkan aliran proses dari input hingga output yaitu
proses kerja sistem. Kerja sistem dimulai dari kondisi bandul diam (ayunan tidak bergerak)
maka pemancar yaitu laser pointer tidak mengenai photodioda dimana logika yang dihasilkan
berlogika high, sehingga sensor photodioda akan menerima cahaya inframerah dan
memberikan outputnya pada mikrokontroler yang akan menghasilkan logika Low yang akan
ditampilkan pada LCD dengan tampilan nama alat tersebut yaitu RANCANGAN ALARM
DIGITAL GEMPA BUMI, sedangkan pada saat terjadi gempa maka ayunan bandul akan
bergerak yang akan membuat pemancar laser pointer mengenai photodioda sehingga logika
yang dihasilkan adalah Low sehingga sensor akan mengirimkan outputnya pada
mikrokontroler dengan logika high, Rangkaian akan mendeteksi logika tersebut dengan
dikeluarkannya logika high yang akan membuat transistor mengaktifkan buzzer untuk
menghasilkan bunyi.
3.2 Catu daya
Adaptor adalah sebuah rangkaian elektronika yang dapat mengubah tegangan AC
menjadi DC. Rangkaian ini alterbnatif pengganti sumber tegangan DC, misalnya batu baterai
ddan accumulator. Keuntungan dari adaptor dibanding dengan batu baterai atau accumulator
adalah sangan praktis berhubungan dengan ketersediaan tegangan karena adaptor dapat
diambil dari sumber tegangan AC yang ada dirumah, dimana pada jaman sekarang ini setiap
rumah sudah menggunakan listrik. Selain adaptor mempunyai jangka waktu yang tidak
terbatas asal ada tegangan AC. Tegangan AC sudah mmerupakan kebutuhan primer dalam
kehidupan manusia.
Bagian-bagian adaptor:
1. Adaptor sederhana terdiri dari:
Bagian input tegangan yang merupakan bagian yang berfungsi sebagai penghubung
sumber tegangan AC daru stop kontak yang ada didalam rumah. Bagian ini terdiri dari
jack/steker kabel input.
2. Bagian penurun tegangan
Bagian ini berfungsi untuk menurunkan tegangan AC 220 v menjadi tegangan yang
lebih kecil, misalnya 3 voolt, 4,5 volt, 7,5 volt, 9 volt atau 12 volt. Untuk memilih
output tegangan ini digunakan rotary switch/saklar 1 induk 6 anak. Trafo yang
digunakan adalah jenis step down, dapat menggunakan trafo denggan tegangan arus
500 mA.
3. Bagian penyearah
Bagian ini berfungsi untuk mengubah tegangan AC menjadi DC. Komponen
sehingga membentuk jembatan dioda. Bagian filter ini berfunngsi untuk
menghilangkan tegangan AC yang masih lewat. Efek dari tegangan AC yang lewat ini
adalah munculnya suara dengung. Komponen yang dibutuhkan antara lain IC
penstabil tegangan dan elco.
4. Bagian output tegangan
Bagian ini berfungsi untuk menurunkan tegangan sebagai keluaran tegangan berupa
tegangan DC. Bbesar keluaran tegangan DC ini sesuai dengan tegangan output pada
trafo step down yang diatur oleh rotary switch sesuai yang diinginkan.AC 220 Volt
menjadi tegangan yang lebih kecil, misalnya
3.3 Sensor Photodioda dan rangkaian pemancar
Sensor photodioda merupakan dioda yang peka terhadap cahaya, sensor photodioda
akan mengalami perubahan resistansi pada saat menerima intensitas cahaya dan akan
mengalirkan arus listrik secara forward sebagaimana dioda pada umumnya. Sensor
photodioda adalah salah satu jenis sensor yang peka terhadap ccahaya yang diterima. Arus ini
umumnya teratur terhadap power density (Dp). Perbandingan antara arus keluaran dengan
power density disebut sebagai current responsitivity. Arus yang dimaksud adalah arus bocor
ketika photodioda tersebut disinari dan dalam keadaan dipanjang undur. Tanggapan frekuensi
sensor photodioda memiliki tanggapan paling baik terhadap cahaya inframerah, tepatnya pada
cahaya dengan panjang gelombang sekitar 0,9 µm.
Photodioda adalah sensor yang termasuk kategori cahaya photo conductive yaitu
sensor cahaya yang akan mengubah perubahan intensitas cahaya yang diterima menjadi
perubahan konduktivitas pada terminal sensor tersebut. Dioda photo merupakan sensor cahaya
yang akan mengalirkan arus listrik satu arah saja dimana akan mengalirkan arus listrik dari
kaki katoda pada saat menerima intensitas cahaya. Photo dioda sering digunakan pada aplikasi
penerima cahaya inframerah. Photo dioda ini dapat dikonfigurasikan untuk memberikan
yang mengenai photodioda maka akan berlogika Low, sedanngkan pada saat photodioda tidak
dikenai oleh cahaya maka akan berlogika high.
Pada saat rangkaian pemancar yaitu laser pointer mengenai sensor photodioda maka
menghasilkan logika low, dan sebaliknnya jika laser pointer tidak mengenai photodioda maka
akan menghasilkan logika high.
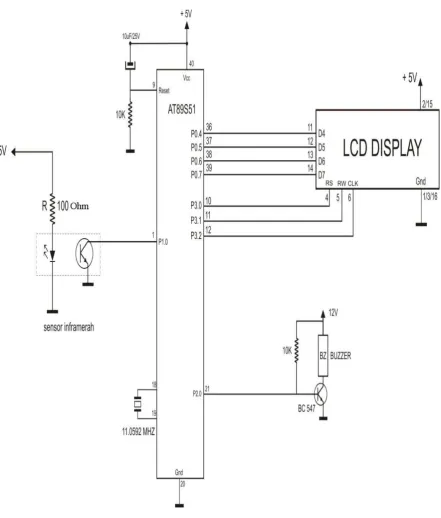
3.4 Rangkaian mikrokontroler AT89S51
Rangkaian ini berfungsi sebagai pusat kendali dari seluruh sistem yang ada.
Komponen utama dari rangkaian ini adalah IC mikrokontroler AT89S51. Pada IC inilah
semua program diisikan, sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki.
Mikrokontroler tipe AT89S51 merupakan mikrokontroler keluarga MCS-51 dengan
konfigurasi yang sama persis dengan AT89S51 yang cukup terkenal, hanya saja AT89S51
mempunyai fitur ISP (In- System Programmable Flash Memory). Fitur ini memungkinkan
mikrokontroler dapat diprogram langsung dalam suatu sistem elektronik tanpa melalui
Programmer Board atau Downloader Board. Mikrokontroler dapat diprogram langsung
melalui kabel ISP yang dihubungkan dengan paralel port pada suatu Personal Computer.
Adapun fitur yang dimiliki mikrokontroler AT89S51 adalah sebagai berikut:
1. Sebuah CPU (Central Processing Unit) 8 bit yang termasuk keluarga MCS51.
2. Osilator internal dan rangkaian pewaktu, RAM internal 128 byte (on chip).
3. Empat buah programmable port I/O, masing-masing terdiri atas 8 jalur I/O.
4. Dua buah Timer Counter 16 bit.
5. Lima buah jalur interupsi (2 interupsi external dan 3 interupsi internal).
6. Sebuah port serial dengan kontrol serial full duplex UART
7. Kemampuan melaksanakan operasi perkalian, pembagian dan operasi Boolean (bit).
8. Kecepatan pelaksanaan instruksi per siklus 1 mikrodetik pada frekuensi clock 12 Mhz
10.In-System Programmable Flash Memory.
Mikrokontroler AT89S51 memiliki 5 buah ruang alamat, yaitu :
Ruang alamat kode (Code Address Space) sebanyak 64 Kbyte, yang
seluruhnya merupakan ruang alamat kode eksternal.
Ruang alamat memori data internal yang dapat dialamati secara langsung,
yang terdiri atas :
1. RAM sebanyak 128 byte
2. Hardware register sebanyak 128 byte
Ruang alamat memori data internal yang dialamati secara tidak langsung sebanyak
128 byte, seluruhnya diakses dengan pengalamatan tidak langsung.
Ruang alamat memori data eksternal sebanyak 64 Kbyte yang dapat ditambahkan
oleh pemakai.
Ruang alamat bit. Dapat diakses dengan pengalamatan langsung
3.5 Rangkaian Penguat Arus
Driver atau penguat arus adalah banyaknya elektron (muatan listrik) yang mengalir
melalui suatu titik dalam rangkaian listrik tiap satuan waktu. Arus listrik mengalir dari kutub
positif ke kutub negatif, hal itu disebabkan karena kutub positif potensial lebih tinggi
dibanding kutub negatif. Driver atau penguat arus adalah sebuah rangkaian untuk menguatkan
arus. Fungsi penguatan arus adalah untuk mengendalikan beban yang lebih besar. Rangkaian
ini terdiri dari sebuah transistor NPN dan sebuah resistor. Arus yang mengalir dari basis harus
lebih kecil daripada arus yang mengalir dari kolektor ke emitor, oleh sebab itu maka ada
baiknya jika pada pin basis dipasang sebuah resistor. Dengan kata lain, transistor NPN hidup
ketika tegangan basis lebih tinggi daripada tegangan emitter. Tanda panah dalam symbol
sebagai penguat yaitu arus kecil pada basis dipakai untuk mengontrol arus yang lebih besar yang diberikan ke kolektor melalui transistor tersebut. Dari sini bisa kita lihat bahwa fungsi
dari transistor adalah hanya sebagai penguat ketika arus basis akan berubah. Perubahan arus
kecil pada basis inilah yang dinamakan dengan perubahan besar pada arus yang mengalir dari
kolektor ke emitter. Kelebihan dari transistor penguat bukan sekedar bisa menguatkan sinyal,
namun transistor ini juga dapat di pakai sebagai penguat arus, penguat daya dan penguat
tegangan.
Gambar 3.2 transistor sebagai penguat pada buzzer
Gambar transistor sebagai pennguat pada buzzzer
Dik: hfe = 110
Rb = 10 Kohm
Vcc = 12 V
Vbc = 0,7 V
Jika Vb = logika 1
Dit: Ib ...?
Rbeban...?
K
3.6 LCD (Liquid Cristal Display)
LCD (Liquid Cristal Display) berfungsi untuk menampilkan karakter angka, huruf
ataupun simbol dengan lebih baik dan dengan konsumsi arus yang rendah. LCD (Liquid
Cristal Display) dot matrik M1632 merupakan modul LCD buatan hitachi. Modul LCD
(Liquid Cristal Display) dot matrik M1632 terdiri dari bagian penampil karakter (LCD) yang
berfungsi menampilkan karakter dan bagian sistem prosesor LCD dalam bentuk modul
dengan mikrokontroler yang diletakan dibagian belakan LCD tersebut yang berfungsi untuk
mengatur tampilan LCD serta mengatur komunikasi antara LCD dengan mikrokontroler yang
menggunakan modul LCD tersebut.
LCD (Liquid Cristal Display) berfungsi untuk menampilkan karakter angka, huruf
ataupun simbol dengan lebih baik dan dengan konsumsi arus yang rendah. LCD (Liquid
Cristal Display) dot matrik M1632 merupakan modul LCD buatan hitachi. Modul LCD
berfungsi menampilkan karakter dan bagian sistem prosesor LCD dalam bentuk modul
dengan mikrokontroler yang diletakan dibagian belakan LCD tersebut yang berfungsi untuk
mengatur tampilan LCD serta mengatur komunikasi antara LCD dengan mikrokontroler yang
menggunakan modul LCD tersebut.
Modul prosesor M1632 pada LCD tersebut memiliki memori tersendiri yaitu:
CGROM (Character Generator Read Only Memory), CGRAM (Character Generator Random
Access Memory), dan DDRAM (Display Data Random Access Memory).
Fungsi Pin LCD (Liquid Cristal Display) Dot Matrix 2×16 M1632
DB0 – DB
DBO-DB adalah jalur data (data bus) yang berfungsi sebagai jalur komunikasi untuk
mengirimkan dan menerima data atau instruksi dari mikrokontrooler ke modul LCD.
RS
RS adalah pin yang berfungsi sebagai selektor register (register sellect) yaitu dengan
memberikan logika low (0) sebagai register perintah dan logika high (1) sebagai register data.
R/W
RW adalah pin yang berfungsi untuk menentukan mode baca atau tulis dari data yang
terdapat pada DB0 – DB7. Yaitu dengan memberikan logika low (0) untuk fungsi read dan
Enable (E)
Enable (E) berfungsi sebagai Enable Clock LCD, logika 1 setiap kali pengiriman atau
pembacaan data high (1) untuk mode write.
Berikut adalah rancangan program dari sistem LCD yang digunakan:
Buzzer Bit P2.0
Sensor Bit P1.0
Acall KirimPesan_Lcd
ACALL BARIS2_LCD
Mov DPTR,#Nama
Acall KirimPesan_Lcd
SetB Buzzer
Acall ClearLcd
Mov DPTR,#DET
Acall KirimPesan_Lcd
Mov R0,#60
Djnz R4,Tunggu_1detik
Ret
Mov R4,#100
Tunggu_500mdetik:
Acall Delay_5mS
Djnz R4,Tunggu_500mdetik
Ret
Delay_100mS:
Mov R4,#20
Tunggu_100mdetik:
Acall Delay_5mS
Djnz R4,Tunggu_100mdetik
Ret
Delay_5mS:
Mov TMOD,#21H
Mov TH0,#0EDH
Mov TL0,#0FFH
Setb TR0
Tunggu_5mS:
Jbc TF0,Sudah_5mS
Ajmp Tunggu_5mS
Sudah_5mS:
Clr TR0
Ret
$Include(Rutin.asm)
3.7 Perancangan Perangkat Lunak Sistem
Rancangan perangkat lunak sistem (program) adalah susunan urutan perintah yang
sistematis untuk menjalankan atau mengendalikan sistem. Pada perancangan ini perangkat
lunak dirancang dengan menggunakan bahasa pemograman asembly ASM-51.
Program disusun dengan kode-kode perintah sesuai dengan kode yang disediakan oleh
asembly ASM-51, setelah selesai penurunan program, kemudian program di compile menjadi
kode mesin agar dapat diunduh dengan rangkaian mikrokontroler sehingga dapat menjalankan
sistem.
Berikut adalah rancangan program dari sistem yang digunakan:
Ret
Penjelasan-penjelasan dari perintah diatas sebagai berikut:
1. Buzzer Bit P2.0
Reset Bit P2.0
Sensor Bit P1.0
Led Bit P3.0
Perintah diatas adalah perintah untuk memberi nama pada beberapa port yang
digunakan dengan tujuan agar memudahkan penulisan program selanjutnya.
2. ACAAL Delay_1s
Clr Buzzer
Perintah diatas adalah perintah untuk menunda waktu selama 1 detik dan mematikan
buzzer dengan memmberi logika 0 pada port buzzer P0.0
Perintah diatas adalah perintah untuk mendeteksi sensor inframerah. Jika kondisi
sensor yaitu port P1.0 berlogika 1 sistem akan berhenti dan menunggu hingga port tersebut
berlogika 0.
4. Mov R0, #5
Perintah diatas adalah perintah untuk mengisi register 0 dengan 5.
5. Clr Led
ACAAL Delay_500ms
SetB Led
ACAAL Delay_500ms
Djnz R0, TS2
Perintah diatas adalah perintah untuk menghidup matikan lampu indikator selama 5
kali.
6. Loop: Clr Led
ACAAL Delay_1s
SetB Led
ACAAL Delay_1s
Perintah diatas adalah perintah untuk melakukan detteksi sensor ddengan menjalankan
lampu indikatoor hidup dan mati.
7. JNB Sensor, Loop
Perintah diatas adalah perintah untuk membaca sensor yaitu port P1.0, jika port
tersebut berlogika 0 memberi arti tidak terjadi ayunan pada bbandul atau sensor sehingga
sensor berlogika 1 berarti telah terjadi perubahan logika pada ssensor yang memberi arti
kemungkinnan terjadinya gempa, karena ayunan bandul. Dengan demikian sistem akan
mengaktifkan alarm.
Perintah diatas adalah perintah yang akan mengaktifkan atau membunyikan buzzer
yaitu dengan memberi logika 1 pada port P0.0.
9. Mov R0, #60
Perintah diatas adalah perintah untuk menghitung waktu pengaktifan buzzer yaitu
selama 1 menit disertai pengaktifan lampu indikator, setelah 1 menit sistem akan mematikan
alarm atau buzzer dan kembali ke awal.
Tunggu_500mdetik:
Acaal Delay_5ms
Djnz R4, Tunggu_500detik
Ret
Perintah diatas adalah perintah menunda waktu selama 500 mdetik dengan
penundaaan loop 100x5 ms.
12.Delay_5ms:
Perancanag perangkat lunak (rutin) pada LCD yaitu:
PosisiAwalLCD:
Mov A,#02H
Lcall Kirim_Perintah
Acall Delay_LCD
PerintahLCD:
Lcall Kirim_Perintah
Acall Delay_LCD
Ret
ClearLCD:
Mov A,#01H
Lcall Kirim_Perintah
Acall Delay_LCD
Ret
Delay_LCD:
Push B
Mov B,#06H
Delay_LCD_Loop:
Push B
Acall Delay_LCD2
Pop B
Djnz B,Delay_LCD_Loop
Pop B
Ret
Delay_LCD2:
Mov B,#0FFH
Acall Kirim_Perintah ;
Push B ;Tunda 100uS lebih
Mov B,#100 ;
Djnz B,$ ;
Pop B ;
Mov A,#30H ;
Acall Kirim_Perintah ;
Mov A,#20H ;Send Init
Acall Kirim_Perintah ;
Mov A,#28H ;8x5 2lines
Acall Kirim_Perintah ;
Mov A,#08H ;Display OFF
Acall Kirim_Perintah ;
Mov A,#01H ;Display Clear
Acall Kirim_Perintah ;
Mov A,#0EH ;Display ON
Acall Kirim_Perintah ;
Mov A,#06H ;Mode Increment Address
KirimPesan_LCD:
LoopKirimPesan_LCD:
Mov A,#00H ;Ambil data dari memori yg ditunjuk
Movc A,@A+Dptr ;
Cjne A,#0FH,Kirim_LCD ;Kirim ke LCD selama belum ditemukan
Ret ;0FH
Kirim_LCD:
Acall Kirim_Karakter
Inc Dptr ;Tunjuk ke memori selanjutnya
3.8 Diagram Alir Program (Flowchart)
Start
Inisialisasi LCD reset Hardware
Aktifkan alarm (Buzzer)
Non aktifkan Buzzer
Tampilkan pesan terdetelksi gempa pada LCD Tampilkan pesan nama alat
Baca sensor inframerah
Stop Tetrdeteksi
Y T
Keterangan:
Diagram alir flow chart diatas merupakan diagram alir perancangan. Diagram alir
diatas menjelaskan satu siklus aliiran proses dari mulai start hingga stop. Dari awal start
inisialisasi LCD hardware (perangkat keras) akan direset oleh rangkaian reset yang kemudian
akan menampilkan nama alat yang digunakan, dan program akan mulai dari awal yaitu
pembacaan sensor infra merah. Apabila telah terdeteksi gempa maka sensor inframerah sistem
akan mengaktifkan alarm (buzzer) sebagai sinyal peringatan telah terjadi gempa, yang akan
ditampilkan sebagai pesan pada LCD.
BAB IV
PENGUJIAN RANGKAIAN DAN ANALISA PROGRAM
4.1. Pengujian Rangkaian
4.1.1 Pengujian Data Mikrokontroler AT89S51
Pengujian dilakukan terhadap rangkaian yang telah selesai dirancang atau dirkit.
Pengujian ini dilakukan dengan serangkaian pengukuran terhadap pin-pin mikrokontroler dn
tegangan catu daya, selain pengukuran yang dilakukan pengujian terhadap program yaitu
respon program terhadap masukan yang diberikan dan mengamati keluaran sistem tersebut.
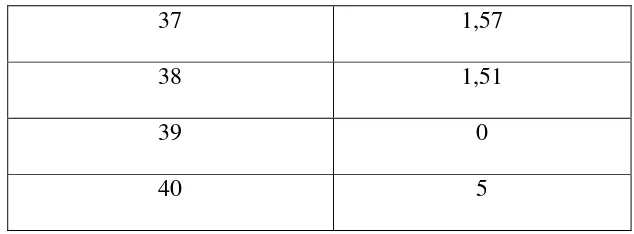
Pengukuran Pin Mikrokontroler
PIN-PIN
MIKROKONTROLER
TEGANGAN (Volt)
1 4,98
2 4,98
3 4,98
4 4,98
5 4,98
6 4,98
7 4,98
8 4,98
9 0
10 4,98
37 1,57
38 1,51
39 0
40 5
Tabel 4.1 Pengukuran tegangan terhadap pin mikrokontroler AT89S51
Keterangan:
Tabel pengukuran diatas merupakan pengukuran terhadap pin-pin mikrokontroler
AT89S51. Pengukuran ini dilakukan bertujuan untuk menguji apakah rangkaian
mikrokontroler telah terhubung dengan baik pada rangkaian dan program telah bekerja yaitu
dengan membandingkan tegangan keluaran masing-masing port mikrokontroler dengan
program awal. Pada saat mikrokontroler diaktifkan dari program yang dibuat dapat dilihat
port yang diberi logika 0 hanya port buzzer yaitu P0.0 sedangkan port lain tidak diberi
masukan. Dengan demikian semuanaya bernilai logika 1, mikrokontroler tegangan yang
terukur pada port tersebut berlogika 1 atau mendekati 5 volt.
4.1.2 Pengujian Rangkaian Mikrokontroler AT89S51
Untuk mengetahui apakah rangkaian mikrokontroler bekerja denggan baik, maka
dilakukan pengujian. Pengujian bagian ini dilakukan dengan memberikan program sederhana
pada mikrookontroler AT89S51. Programnya adalah sebagai berikut:
TS1: JB Sensor, $
ACAAL Delay_1s
Mov R0, #5
TS2: JB Sensor, TS1
SetB Led
Penjelasan-penjelasan dari program diatas yaitu:
1. TS1: JB Sensor, $
ACAAL Delay_1s
Mov R0, #5
TS2: JB Sensor, TS1
ACAAL Delay_500ms
SetB Led
ACAAL delay_500ms
Djnz R0, TS2
Perintah program diatas adalah perintah untuk memulai pendektesian ayunan bandul,
akan tetapi sebelum deteksi sistem akan mencari suatu kondisi standby atau kondisi bandul
dalam keadaan diam. Dalam hal ini dengan mendeteksi sensor yaitu pada port P1.0, jika
sensor berlogika 1 mikrokontroler akan menunggu hingga sensor berlogika 0 yaitu pada saat
sensor mendapat cahaya infra merah dari pemancar. Jika kondisi standby telah dicapai sensor
akan mulai mendeteksi ayunan.
1. Loop: Clr Led
Perintah program diatas adalah perintah untuk mendeteksi sensor yang diiringi dengan
kedipan lampu indikator sebagai tanda sistem deteksi mulai bekerja yaitu bila sennsor
berlogika 0, sensor akan terus melakukan loop, sedangkan pada saat port P1.0 berlogika 1
program tidak akan lompat ke alamat loop melainkan meneruskan kebawah yaitu
mengaktifkan buzzer. Dari pengujian yag dilakukan diperoleh hasil bahwa program telah
bekerja dengan sempurna dan memberi respon sesuai dengan yang diprogramkan.
2. Mov R0, #60
TS3: Clr Led
Setb Led
ACAAL Delay_500ms
JB Reset, TS4
Clr Buzzer
Ajmp TS1
Printah program diatas adalah perintah program setelah terdeteksi ayunan bandul dan
buzzer telah diaktifkan. Program tersebut melakukan penundaan waktu selama 1 menit dan
mendeteksi tombol reset untuk menonaktifkan buzzer dan kembali keawal untuk mulai
mendeteksi kembali. Seiring dengan tunda waktu selama 1 menit, program akan mengedipkan
lampu indikator dengan durasi 500 ms selama 60 kali. Jika tombol reset ditekan sebelum 60
detik program akan langsung menghentikan atau menonaktifkan buzzer dan kembali ke awal
setelah diuji program juga bekerja sesuai dengan yang diprogramkan dengan tundaan waktu
yang tepat yaitu 1 menit, jika tidak dilakukan reset.
4.1.3 Pengujian Rangkaian Penerima Inframerah
Hasil pengujian ini pada rangkaian ini yaitu data yang telah diolah oleh
mikrokontroler AT89S51 akan dikirimkan kerangkaian penerima dengan menggunakan LED
infra merah. Pada rangkaian LED infra merah akan menyala jika basis pada transistor diberi
tegangan yang lebih besar dari 0,7 volt ini akan sama artinya jika pada mikrokontroler AT
89S51 diberi logika high (1) karena pin yang diberi logika high akan mempunyai tegangan 4
sampai dengan 5 volt cukup untuk mengaktifkan transistor sedangkan untuk mematikan LED
inframerah maka mikrokontroler AT89S51 harus diberi logika low (0), karena dengan
memberikan logika low pada mikrokontroler, maka mikrokontroler akan memiliki tegangan 0
sampai dengan 0,009 Volt, tegangan ini akan menyebabkan transistor tidak aktif. Untuk
pengiriman data agar dapat dikirimkan dari jarak yang jauh, maka LED infra merah harus
alam. Jika LED infra merah dipancarkan dengan frekuensi selain 38KHz, maka pancarannya
akan terganggu oleh frekuensi-frekuensi infra merah dari alam, seperti frekuensi inframerah
yang dipancarkan oleh matahari, tumbuhan bahkan badan manusia. Dengan menggunakan
frekuensi 38KHz maka pancaran LED infra merah yang dihasilkan oleh rangkaian tidak
terganggu oleh pancaran infra merah alam, ssehingga jarak pengiriman data semakin jauh.
Rangkaian penerima inframerah ini berbentuk IC. IC ini mempunyai karakteristik yaitu akan
mengeluarkan logika high (1) atau tegangan 4,5 Volt pada outputnya jika IC ini mendapatkan
pancaran sinar infra merah denngan frekuensi antara 38 – 40 KHz, dan ic ini akan
mengeluarkan sinyal low (0) atau tegangan 0,109 Volt jika pancaran sinar inframerah dengan
frekuensi antara 38-40 KHz berhenti, namun logika low tersebut hanya sesaat yaitu sekitar
500 µs, setelah itu outputnya akan kembali menjadi high. Sifat inilah yang dimanfaatkkan
sebagai pengiriman data. Output dari ic ini dihubungkan pada mikrokontroler sehingga setiap
kali ic ini mengeluarkan logika low atau high pada outpuutnya, mikrokontroler dapat
langsung mendeteksinya.
Cahaya infra merah mempunyai perbedaan dengan cahaya biasa pada umumnya. Kita
bisa melihat dengan jelas apabila suatu sinar atau cahaya mengenai suatu benda. Lain halnya
dengan sinar infra merah kita tidak bisa melihat wujud dari sinar tersebut.
Sistem sensor inframerah pada dasarnya menggunakan inframerah sebagai media utuk
komunikasi data antara receiver dan transmitter. Sistem akan bekerja jika sinar infra merah
yang dipancarkan terhalang oleh suatu benda yang mengakibatkan sinar infra merah tersebut
tidak dapat terdeteksi oleh penerima. Keuntungan atau manfaat dari sistem ini dalam
penerapannya antara lain sebagai pengendali jarak jauh, alarm gempa bumi, alarm
kemalingan, otomatisasi pada sistem ini terdiri atas sebuah LED infra merah yang dilengkapi
dengan rangkaian yang membangkitkan data untuk dikirimkan melalui sinar infra merah,
sedangkan pada bagian penerima biasanya terdapat foto transistor, photodioda atau infrmerah
4.1.4 Rangkaian penguat Arus
Transistor Sebagai Penguat adalah salah satu fungsi transistor selain transistor sebagai
saklar. Pada saat ini penggunaan transistor sebagai penguat sudah banyak di gunakan dalam
sebuah perangkat elektronik. Contohnya adalah Tone Control, Amplifier (Penguat Akhir),
Pre-Amp dan rangkaian elektronika lainnya. Penggunaan transistor ini memang sudah
menjadi keharusan dalam komponen elektronika.
Transistor merupakan suatu komponen monokristal semi konduktor di mana dalam
komponen terdapat dua pertemuan antara P-N. Sehingga kita dapat membuat dua rangkaian
yaitu P-N-P dan N-P-N. Transistor merupakan suatu komponen yang dapat memperbesar
level sinyal keluaran sampai beberapa kali sinyal masukan. Sinyal masukan disini dapat
berupa sinyal AC ataupun DC. Prinsip yang di gunakan dalam transistor sebagai
penguat adalah arus kecil pada basis digunakan untuk mengontrol arus yang lebih besar yang
diberikan ke Kolektor melewati transistor tersebut. Dari sini dapat kita lihat bahwa fungsi dari
transistor hanya sebagai penguat ketik arus basis akan berubah. Perubahan arus kecil pada
basis mengontrol inilah yang dinamakan dengan perubahan besar pada arus yang mengalir
dari kolektor ke emitter.
Kelebihan dari transistor penguat tidak hanya dapat menguatkan sinyal, tapi transistor
ini juga bisa di gunakan sebagai penguat arus, penguat tegangan dan penguat daya. Berikut ini
gambar yang biasa di gunakan dalam rangkaian transistor khusunya sebagai penguat yang
biasa di gunakan dalam rangkaian amplifier sedehana. Suatu transistor sebagai penguat dapat
bekerja secara optimal maka titik penguat dengan transistor harus di tentukan dan juga harus
sama dengan yang di tentukan oleh garis beban AC/DC. Contohnya adalah memiliki titik
kerja di daerah cut-off, titik kerja berada di tengah-tengah garis beban dan penguat kelas AB
merupakan gabungan antara kelas A dan B yang bekerja secara bergantian dengan tipe
4.1.5 Pengujian Rangkaian Keseluruhan
Setelah semua komponen terangkai dengan baik maka pengujian secara keseluruhan
dapat dilakukan dengan catu daya kerangkaian. Setelah program diunduh ke IC yaitu pada
saat rangkaian diaktifkan, rangkaian sensor akan memberikan input kemasukan
mikrokontroler melalui port P1.0. Jika sensor mengenai cahaya laser sensor berlogika 0
sedangkan jika sensor tidak mengenai cahaya sensor akan berlogika 1. Pada keadaan diam
logika pada input P1.0 berlogika 0. Jika terjadi gempa dan mengakibatkan ayunan, maka sinar
laser akan ikut berayun dan mengakibatkan perubahan logika dari 0 menjadi 1. Rangkaian
lokasi tersebut. Buzzer diaktifkan dengan dikeluarkannya logika 1 pada port P2.0. Dengan
demikian transistor penguat akan mengaktifkan buzzer.
3.1.6 Spesifikasi alat
Tegangan kerja 12 Volt
Arus 210 mA
Daya 2,52 Watt
Tinggi 28 cm
Lebar 7 cm
Kedalaman 6 cm