FAKULTAS TEKNOLOGI DAN INFORMATIKA
INSTITUT BISNIS DAN INFORMATIKA STIKOM SURABAYA 2016
KONTROL KONDISI AIR SECARA OTOMATIS PADA TANAMAN HIDROPONIK
TUGAS AKHIR
Program Studi S1 Sistem Komputer Fakultas
Teknologi dan Informatika
Oleh :
x DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN SYARAT ... ii
MOTTO ... iii
HALAMAN PERSEMBAHAN ... iv
HALAMAN PENGESAHAN ... v
HALAMAN PERNYATAAN ... vi
ABSTRAK ... vii
KATA PENGANTAR ... viii
DAFTAR ISI ... x
DAFTAR GAMBAR ... xiii
DAFTAR TABEL ... xiv
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang Masalah ... 1
1.2 Rumusan Masalah ... 3
1.3 Batasan Masalah ... 3
1.4 Tujuan ... 4
1.5 Manfaat ... 4
BAB II LANDASAN TEORI ... 5
2.1 Hidroponik ... 5
2.1.1 Teknik Hidroponik Sistem Sumbu (Wick) ... 6
2.2 Kangkung ... 7
xi
BAB III METODE PENELITIAN DAN PERANCANGAN SISTEM ... 20
3.1 Metode Penelitian ... 20
3.2 Rancangan Sistem ... 21
3.3 Perancangan Mekanik Alat ... 22
3.3.1. Desain Mekanik Keseluruhan ... 24
3.3.2. Desain Skematik Elektro Keseluruhan ... 25
3.4 Prosedur Evaluasi ... 26
3.4.1. Desain Dan Uji Coba ... 26
3.4.2. Evaluasi ... 26
3.4.3. Bagian Komponen Alat ... 26
3.4.4. Ukuran Dimensi Alat………..27
3.4.5. Struktur Material Alat……….28
3.5 Pembuatan Perangkat Keras ... 28
3.5.1. Perancangan Mikrokontroler Arduino ... 28
3.5.2. Rangkaian Sensor Kapasitif ... 30
3.5.3. Perancangan LCD. ... 31
3.6 Perancangan Rangkaian Solenoid Valve. ... 32
3.7 Perancangan Perangkat Lunak………....33
xii
BAB IV HASIL DAN PENGUJIAN ... 36
4.1 Pengujian Arduino Mega ... 36
4.1.1. Tujuan Pengujian ... 36
4.1.2. Alat yang Dibutuhkan ... 36
4.1.3. Prosedur Pengujian ... 37
4.1.4. Hasil Pengujian ... 37
4.2 Pengujian Modul Relay ... 38
4.2.1. Tujuan Pengujian ... 38
4.2.2. Alat yang Dibutuhkan ... 38
4.2.3. Prosedur Pengujian ... 39
4.2.4. Hasil Pengujian ... 39
4.3 Pengujian Pengujian Sensor Kapasitif ... 40
4.3.1. Tujuan Pengujian ... 40
4.3.2. Alat yang Dibutuhkan ... 40
4.3.3. Prosedur Pengujian ... 40
4.3.4. Hasil Pengujian ... 41
4.4 Pengujian LCD (Liquid Cristal Display) ... 40
4.4.1. Tujuan Pengujian ... 41
4.4.2. Alat yang Dibutuhkan ... 41
4.4.3. Prosedur Pengujian ... 42
4.4.4. Hasil Pengujian ... 42
4.5 Pengujian Kontrol Air……….43
4.5.1 Tujuan Pengujian………43
xiii
4.6.3 Prosedur Pengujian………..46
4.6.4 Hasil pengujian………46
4.7 Pengujian Keseluruhan Sistem………47
4.7.1 Tujuan Pengujian……….47
4.7.2 Alat Yang Dibutuhkan……….47
4.7.3 Prosedur Pengujian………..47
4.7.4 Hasil Pengujian………48
BAB V PENUTUP ... 50
5.1 Kesimpulan ... 50
5.2 Saran ... 51
DAFTAR PUSTAKA ... 52
LAMPIRAN ... 53
1 1.1 Latar Belakang Masalah
Bercocok tanam merupakan kegiatan yang sejak dahulu telah dilakukan
oleh nenek moyang kita. Kegiatan bercocok tanam lebih terkhusus pada sektor
pertanian yang dapat menunjang kebutuhan ekonomi masyarakat/petani. Petani
telah terbiasa melakukan sistem konvensional dalam bertani, yaitu dengan
mengolahan lahan terlebih dahulu, kemudian menunggu hujan turun adalah waktu
yang tepat untuk menanam. Tentu saja ini bukanlah kegiatan yang efektif jika
dibandingkan antara zaman dahulu dan zaman modern seperti saat ini.
Di Negara maju, kegiatan pertanian dapat dilakukan dengan praktis, lebih
terkontrol dan terjadwal. Sistem bercocok tanam yang dikembangkan namun telah
ada sejak dahulu yaitu sistem hidroponik. Hidroponik merupakan cara bercocok
tanam tanpa menggunakan tanah. Tanah yang sejatinya merupakan tempat
tumbuhnya tanaman dapat digantikan dengan media inert, seperti pasir, arang
sekam, rockwool, kapas, kerikil. Di daerah dengan lahan yang tidak
produktif/margin, hidroponik menawarkan kegiatan pertanian yang dapat
dikembangkan dengan baik. Pertanian hidroponik mampu memberikan hasil
produksi dengan mutu yang tinggi yang dapat meningkatkan nilai jual tanaman
tersebut. Golongan tanaman hortikultura yang biasa ditanam dengan media
tersebut, meliputi: tanaman sayur, tanaman buah, tanaman hias, dan tanaman
obat–obatan. Sedangkan jenis tanaman yang dapat ditanam dengan sistem
hidroponik antara lain bung ( misal: krisan, gerberra, anggrek, kaktus), sayur –
dengan volume larutan hara yang besar pula, sehingga dapat menekan fluktuasi
konsentrasi larutan hara. Pada sistem ini tidak dilakukan sirkulasi larutan hara,
sehingga dapat mengurangi ketergantungan terhadap ketersediaan energi listrik.
Kesederhanaan Wick secara teknis inilah yang menjadikan teknologi ini akan
mudah diaplikasikan oleh petani.
Upaya peningkatan produktivitas tanaman kangkung dengan pemupukan
secara umum telah banyak dilakukan meskipun hasilnya belum cukup memuaskan.
Pemupukan dapat melalui akar maupun daun. Pemupukan melalui akar sering
mengalami hambatan, sehingga unsur hara yang diserap tanaman berkurang,
sedangkan pemupukan melalui daun dapat terjadi penyerapan hara yang lebih
cepat dan efektif dibanding melalui akar, sehingga pengaruh pupuk pada tanaman
akan lebih cepat terlihat (Yusrinawati et al., 2000).
Metode perawatan hidroponik yang kebanyakan para petani tanaman
hidroponik adalah mengosongkan kolam penampung larutan nutrisi sudah keruh
serta dipenuhi dengan lumut dan menambahkan larutan nutrisi tiap kali larutan
nutrisi sudah tidak menyentuh akar. Oleh karena itu, pada penelitian ini bertujuan
untuk membantu perawatan pada tanaman hidroponik khususnya pada bagian
1.2 Rumusan Masalah
Berdasarkan latar belakang masalah diatas di dapat rumusan masalah
tentang bagaimana mengontrol ketersediaan air dalam tangki hidroponik dan
menjaga keadaan kebersihan air pada tangki hidroponik.
1.3 Batasan Masalah
Dalam perancangan dan pembuatan sistem ini terdapat beberapa batasan
masalah antara lain :
1. Bibit sayuran yang digunakan sample adalah tanaman Ipomoea
reptans/kangkung.
2. Menggunakan system hidroponik Wick.
3. Tidak membahas mengenai dana desain hidroponik yang digunakan.
4. Tidak membahas curah hujan, intensitas cahaya dan kadar oksigen pada
tanaman hidroponik.
5. Sistem kontrol tidak memberikan informasi balik mengenai hasil
tanaman baik atau buruk.
6. Kondisi air yang diteliti adalah volume air pada tangki hidroponik.
1.4 Tujuan
Tujuan dari perancangan dan pembuatan sistem ini antara lain merancang
sebuah alat yang dapat digunakan untuk mengontrol ketersediaan air dalam tangki
utama hidroponik serta dapat menguras tangki dan mengisi ulang tangki pada saat
5 2.1 Hidroponik
Istilah hidroponik berasal dari bahasa latin “hydro” (air) dan “ponous”
(kerja), di satukan menjadi “hydroponic” yang berarti bekerja dengan air. Jadi
istilah hidroponik dapat diartikan secara ilmiah yaitu suatu budidaya tanaman
tanpa menggunakan tanah tetapi dapat menggunakan media seperti pasir, krikil,
pecahan genteng yang diberi larutan nutrisi mengandung semua elemen esensial
yang diperlukan untuk pertumbuhan dan hasil tanaman (Lingga, 2005).
Budidaya dengan sistem hidroponik memiliki kelebihan tersendiri maka
dapat berkembang lebih cepat. Kelebihan yang utama adalah keberhasilan
tanaman untuk tumbuh dan berproduksi lebih terjamin. Selain itu, perawatan lebih
praktis, pemakaian pupuk lebih efisien, tanaman yang mati lebih mudah diganti
dengan tanaman yang baru, tidak diperlukan tenaga yang kasar karena metode
kerja lebih hemat, tanaman lebih higienis, hasil produksi lebih kontinu dan
memiliki hasil yang lebih baik dibandingkan secara konvensional, dapat
dibudidayakan di luar musim, dan dapat dilakukan pada ruangan yang sempit
Gambar 2.1 Hidroponik
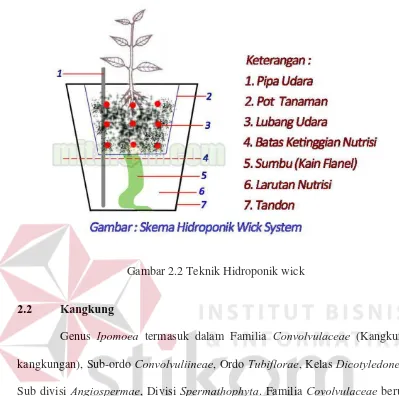
2.1.1 Teknik Hidroponik Sistem Sumbu (Wick)
Teknik hidroponik system terapung ini salah satu sistem hidroponik yang
paling sederhana sekali dan biasanya digunakan oleh kalangan pemula. Sistem ini
termasuk pasif, karena tidak ada bagian-bagian yang bergerak. Nutrisi mengalir ke
dalam media pertumbuhan dari dalam wadah menggunakan sejenis sumbu
Gambar 2.2 Teknik Hidroponik wick
2.2 Kangkung
Genus Ipomoea termasuk dalam Familia Convolvulaceae
(Kangkung-kangkungan), Sub-ordo Convolvuliineae, Ordo Tubiflorae, Kelas Dicotyledoneae,
Sub divisi Angiospermae, Divisi Spermathophyta. Familia Covolvulaceae berupa
herba atau semak berkayu, kebanyakan merayap atau membelit, daun tunggal,
duduk tersebar tanpa daun penumpu (Tjitrosoepomo, 1989: Steenis, 1978).
Familia ini memiliki sekitar 50 genera dan lebih dari 1200 spesies, di mana 400
spesies di antaranya termasuk dalam genus Ipomoea. Tumbuhan ini kebanyakan
tumbuh di daerah tropis dan subtropis, beberapa tumbuh di daerah sedang
(Lawrence, 1951). Kangkung termasuk tumbuhan hidrofit yang sebagian
tubuhnya di atas permukaan air dan akarnya tertanam di dasar air, mempunyai
rongga udara dalam batang atau tangkai daun sehingga tidak tenggelam dalam air
Berdasarkan tempat hidupnya, tanaman kangkung dapat dibedakan
menjadi kangkung darat (Ipomea reptans Poir.) dan kangkung air (Ipomea
aquatiqa Poir.). Akan tetapi, jumlah varietas kangkung darat lebih banyak
dibandingkan kangkung air. Varietas kangkung darat terbagi menjadi varietas
Bangkok, biru, cinde, Sukabumi, dan sutra. Sedangkan varietas kangkung air
terbagi menjadi varietas Sumenep dan varietas Biru. Secara alamiah, Kangkung
ini dapat ditemukan di kolam, rawa, sawah, dan tegalan. Tumbuhnya menjalar
dengan banyak percabangan. Sistem perakarannya tunggang dengan
cabang-cabang akar yang menyebar ke berbagai penjuru. Tangkai daun melekat pada
buku-buku batang dan bentuk helainya seperti hati. Bunganya menyerupai
terompet. Bentuk buahnya bulat telur dan di dalamnya berisi 3 butir biji.
Perbedaan antara kangkung darat dan kangkung air hanya terletak pada warna
bunga. Kangkung air berbunga putih kemerah-merahan, sedangkan kangkung
darat berbunga putih bersih. Perbedaan lainnya pada bentuk daun dan batang.
Kangkung air berbatang dan berdaun lebih besar daripada kangkung darat. Warna
batangnya juga berbeda. Kangkung air berbatang hijau, sedangkan kangkung
darat putih kehijau-hijauan. Lainnya, kebiasaan berbiji. Kangkung darat lebih
banyak bijinya daripada kangkung air, itu sebabnya kangkung darat diperbanyak
Tanaman ini merambat di lumpur dan tempat-tempat yang basah, seperti
tepi kali, rawa-rawa, atau terapung di atas air. Biasa ditemukan di dataran rendah
hingga 1.000 meter di atas permukaan laut. Tanaman bernama Latin Ipomoea
reptans ini terdiri atas dua varietas, yakni kangkung darat yang disebut kangkung
cina dan kangkung air yang tumbuh secara alami di sawah, rawa, atau parit.
Kangkung merupakan tanaman menetap yang dapat tumbuh lebih dari
satu tahun, di dataran rendah sampai dataran tinggi 2000 mdpl (Rukmana, 1994).
Ipomoea crassiculatus Rob., kangkung hutan, berhabitus semak dan tinggi dapat
mencapai lebih dari 2 m., tumbuh pada ketinggian sekitar 1-1000 mdpl.
Tumbuhan yang berasal dari Amerika Tengah ini, dulunya banyak ditanam
sebagai tanaman hias, namun kini telah mengalami naturalisasi dan tumbuh di
sembarang tempat (Lingga, 1992). Ipomoea leari tumbuh liar, berhabitus semak,
merambat, batang kompak tanpa bulu-bulu, tidak bergetah, daun berbentuk
jantung, pertulangan daun menjari dan biji gundul.
Sebagai tanaman tropika, kangkung tumbuh optimal pada temperatur
yang stabil di kisaran 26°-28,5°C. Kangkung membutuhkan penyinaran matahari
yang cukup dan kelembaban di atas 60%. Tanaman kangkung dapat tumbuh dan
berproduksi baik di dataran rendah dan tinggi (± 2000 meter di atas permukaan
Gambar 2.3 Kangkung air (Ipomoea aquatica Forsk.)
(Sumber: Vymazal et al. 2008)
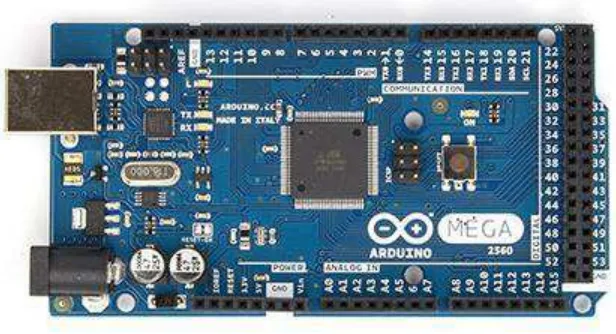
2.3 Arduino Mega2560
Arduino Mega2560 adalah suatu mikrokontroler pada ATMEGA 2560
yang mempunyai 54 input/ output digital yang mana 16 pin digunakan sebagai
PWM keluaran, 16 masukan analog, dan di dalamnya terdapat16 MHZ osilator
kristal, USB koneksi, power, ICSP, dan tombol reset. Kinerja arduino ini
memerlukan dukungan mikrokontroler dengan menghubungkannya pada suatu
computer dengan USB kabel untuk menghidupkannya menggunakan arus AC atau
DC dan bisa juga dengan menggunakan baterai (Oktariawan, 2013).
Arduino Mega merupakan salah satu tipe dari beberapa tipe arduino yang
ada. Arduino Mega terdiri atas dua bagian utama, yaitu:
a. Bagian Hardware
Gambar 2.4 Board Arduino Mega2560
b. Bagian Software
Berupa software Arduino yang meliputi Integrated Development
Environment (IDE) untuk menulis program. Arduino memerlukan instalasi
driver untuk menghubungkan dengan komputer. Pada IDE terdapat contoh
program dan library untuk pengembangan program. Berikut tampilan
Gambar 2.5 Tampilan Software Arduino
Spesifikasi dan keunggulan Arduino Mega dapat dilihat pada gambar di
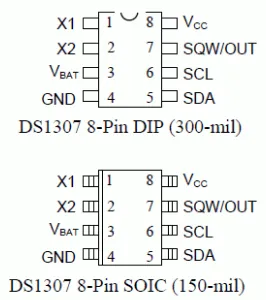
2.4 Real-Time Clock DS1307
Real time clock DS1307 memiliki kristal yang dapat mempertahankan
frekuensinya dengan baik. IC tersebut dapat menghitung waktu (mulai detik
hingga tahun) dengan akurat dan menjaga data waktu tersebut secara real time.
Konsumsi daya RTC ini kurang dari 500nA menggunakan baterai cadangan
dengan operasi osilator. RTC DS1307 terdapat pendeteksi otomatis
kegagalan-daya (power-fail) dan rangkaian switch. Berikut daftar pin RTC DS1307 dan
Gambar 2.6 Diagram pin RTC DS1307 (Datasheet IC Real-Time DS1307)
2.5 Solenoid Valve
Solenoid valve pada perancangan ini berfungsi sebagai buka-tutupnya air.
Alat ini akan dikontrol oleh mikrokontroler melalui relai kapan harus on dan
kapan harus off. Sebenarnya solenoid valve mempunyai beberapa macam jenis
dan beraneka ragam bentuknya di pasaran. Pemasangan solenoid valve ini sangat
mudah dan menggunakan daya listrik yang sangat kecil. Solenoid Valve adalah
kombinasi dari dua dasar unit fungisional, seperti terlihat pada Gambar 2.7:
1. Solenoid (elektromagnet) terdiri atas koil yang berfungsi sebagai
kumparan.
2. Valve merupakan katup dimana saat solenoid teraliri listrik katup
Gambar 2.7 Solenoid Valve
Katup berfungsi untuk menahan atau melewatkan aliran air. Aliran air dapat
mengalir melalui pipa, tergantung pada apakah solenoid diberi listrik atau tidak.
Apabila kumparan diberi aliran listrik, maka katup akan ditarik ke dalam
kumparan solenoid untuk membuka kran. Pegas atau koil akan kembali ke posisi
semula yaitu tertutup apabila tidak ada aliran listrik. Kran solenoid dapat
mengontrol hidrolis (cairan minyak), Pneumatis (udara) atau aliran air. Solenoid
ini menggunakan sebuah alat penyaring untuk mencegah pasir halus atau kotoran
masuk pada lubang kran sehingga menjadikan air menjadi jernih. Kran harus
dipasang dengan arah atau posisi aliran listrik sesuai dengan anak panah yang terdapat pada sisi bodi kran, atau tanda “Positif” dan “Negatif”.
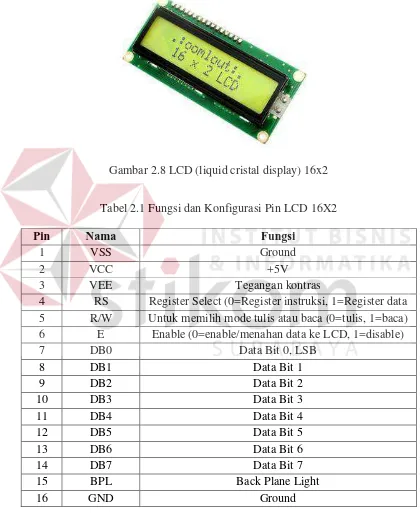
2.6 LCD
Gambar 2.8 LCD (liquid cristal display) 16x2
Tabel 2.1 Fungsi dan Konfigurasi Pin LCD 16X2
Pin Nama Fungsi
1 VSS Ground
2 VCC +5V
3 VEE Tegangan kontras
4 RS Register Select (0=Register instruksi, 1=Register data 5 R/W Untuk memilih mode tulis atau baca (0=tulis, 1=baca)
6 E Enable (0=enable/menahan data ke LCD, 1=disable)
7 DB0 Data Bit 0, LSB
8 DB1 Data Bit 1
9 DB2 Data Bit 2
10 DB3 Data Bit 3
11 DB4 Data Bit 4
12 DB5 Data Bit 5
13 DB6 Data Bit 6
14 DB7 Data Bit 7
15 BPL Back Plane Light
2.7 Relay
Relay adalah sebuah saklar elektronis yang dapat dikendalikan dari
rangkaian elektronik lainnya. Relay terdiri dari 3 bagian utama, seperti terlihat
pada Gambar 2.9, yaitu:
1. Koil : lilitan dari relay.
2. Common : bagian yang tersambung dengan NC (saat keadaan normal).
3. Kontak : terdiri dari NC dan NO.
Gambar 2.9 Relay
NC (Normally Closed) merupakan saklar dari relay yang dalam keadaan
normal (relay tidak diberi tegangan) terhubung dengan common. Sedangkan NO
(Normally Open) merupakan saklar dari relay yang dalam dalam keadaan normal
(relay tidak diberi tegangan) terhubung dengan common. Secara prinsip kerja dari
relay yaitu ketika coil mendapat energi listrik (energized), akan timbul gaya
elektromagnet yang akan menarik armature yang berpegas, dan kontak akan
menutup.
2.8 Power Supply
Sistem power supply merupakan faktor yang paling penting dalam suatu
Bagian-bagian yang terdapat pada rangkaian power supply adalah
sebagai berikut :
1. Step Down
Power supply menerima input dari jala-jala PLN sebesar 220V. Tegangan
AC tersebut masuk ke input transformator, bagian primer trafo berfungsi
menurunkan daya listrik dan tegangan yang ada bersifat bolak-balik atau
Alternating Current (AC) dan belum rata.
2. Rectifier
Dengan menggunakan dioda silikon, maka tegangan AC akan disearahkan
atau diubah menjadi tegangan DC, tetapi tegangan yang dihasilkan belum
rata.
3. Filter
Tegangan yang belum rata, diratakan oleh tapis perata berupa kapasitor
bipolar atau electrolit condensator (Elco), sehingga dihasilkan tegangan DC
yang rata.
4. Stabilisator atau regulator
Tegangan yang melewati kapasitor tidaklah benar-benar rata atau stabil,
Sehingga diperlukan rangkaian stabilisator atau regulator untuk
mengatasinya, sehingga keluaran yang dihasilkan benar-benar sesuai dengan
yang diharapkan atau sesuai dengan input sekunder trafo. Komponen yang
digunakan dapat berupa diode zener, transistor, atau IC. Gambar Power
ditunjukkan pada Gambar 2.10.
20
pengecekan ketinggian air tiap waktu pada tangki hidroponik, dan penggantian air
pada tangki.
Untuk mengatur saat pergantian air, Solenoid valve digunakan sebagai
pintu masuk air ke tangki hidroponik yang dikendalikan dengan modul relay
untuk saat membuka valve dan saat menutup valve. Pada saat pengisian air,
ketinggian air awasi melalui sensor ketinggian air. Untuk memberikan pewaktuan
yang sesuai, RTC1307 digunakan dalam proses pengawasan air pada tangki
3.2 Rancangan Sistem
Berikut merupakan gambar Blok Diagram pada sistem yang akan dibuat,
ditunjukkan pada Gambar 3.1 :
Gambar 3.1 Blok Diagram
Dari gambar Blok Diagram tersebut terdapat beberapa input dan output yang digunakan antara lain :
a. Input (Sensor)
1. Sensor Kapasitif : Digunakan untuk mendeteksi ketinggian air
yang digunakan untuk mengetahui keadaan
ketinggian air.
2. RTC DS1307 : Digunakan sebagai timer untuk waktu
pergantian air pada tangki hidroponik.
b. Output (Aktuator)
1. LCD : Digunakan untuk menampilkan informasi
volume air. Arduino Mega
2560 Sensor Kapasitif
Solenoid Valve LCD
tanaman hidroponik. Tangki ini berfungsi untuk menampung air nutrisi untuk
tanaman hidroponik.
Pada tangki ini terdapat pipa sebagai jalan masuk dan jalan keluarnya,
solenoid valve sebagai pintu masuk dan pintu keluar air, sensor ketinggian air
yang digunakan untuk mengetahui ketinggian air. Berikut perancangan alat dapat
dilihat pada Gambar 3.2.
Berikut adalah detail mengenai bahan-bahan dari tangki hidroponik:
1. Bak penampung air berbahan plastik.
2. Tatakan pot berbahan gabus.
3. Pot tanaman hidroponik berbahan plastik.
4. Media tanam berbahan roughwool.
5. Rangka penyangga berbahan almunium.
6. Pipa PVC berukuran ½.
7. Solenoid Valve
8. Power Supply 24 volt.
Gambar 3.3Desain Mekanik
Pada Gambar 3.3. Desain mekanik alat dapat dijelaskan sebagai berikut
2. Step 1 dilakukan pengecekan tangki, apabila tangki air kosong, maka
pengisian air dimulai dengan membuka valve masuk air untuk menerima air
dari tandon, sedangkan valve keluar air tetap tertutup.
3. Step 2 air pada tangki menyentuh sensor Penuh, valve masuk air akan
menutup, dan valve keluar air juga akan menutup.
4. Step 3 pada saat waktu pengurasan terpicu, valve keluar air akan terbuka
untuk mengeluarkan air pada tangki air, sedangkan valve keluar tetap
tertutup.
5. Step 4 setelah air selesai melewati sensor air kurang, valve keluar air akan
menutup. Dan melakukan pengecekan tangki lagi.
Keterangan Dimensi Wadah Pada Desain Mekanik Diatas.
Bak Air(2 buah) : 70.5 cm (panjang) x 24 cm (lebar) x 20.1 cm
(tinggi)
Kotak Elektro (2 buah): 18 cm (panjang) x 11 (cm lebar) x 6.5 cm (tinggi)
3.3.2 DESAIN SKEMATIK ELEKTRO KESELURUHAN
Perancangan tugas akhir ini diawali dengan melakukan perancangan perangkat
keras yang menjadi satu buah sistem yang saling terintegrasi. Perancangan terdiri
dari perancangan Arduino mega, perancangan solenoid valve, perancangan Relay,
perancangan RTC1307, perancangan sensor kapasitif. Pada Gambar 3.4 dapat
dilihat Schematic perancangan seluruh kontrol kondisi air secara otomatis pada
[image:30.595.92.513.309.711.2]tanaman hidroponik.
Gambar 3.4 Skematik Perancangan Keseluruhan Sistem PWM COMUNICATION D IG IT A L ANALOG IN ATMEGA2560 16AU 1126 microcontrolandos.blogspot.com T X 0 T X 3 T X 2 T X 1 S D A S C L R X 0 R X 3 R X 2 R X 1 P D 0 /S C L /I N T 0 2 1 P D 1 /S D A /I N T 1 2 0 P D 2 /R X D 1 /I N T 2 1 9 P D 3 /T X D 1 /I N T 3 1 8 P H 0 /R X D 2 1 7 P H 1 /T X D 2 1 6 P J 0 /R X D 3 /P C IN T 9 1 5 P J 1 /T X D 3 /P C IN T 1 0 1 4 P E 0 /R X D 0 /P C IN T 8 0 P E 1 /T X D 0 /P D O 1 P E 4 /O C 3 B /I N T 4 2 P E 5 /O C 3 C /I N T 5 3 P G 5 /O C 0 B 4 P E 3 /O C 3 A /A IN 1 5 P H 3 /O C 4 A 6 P H 4 /O C 4 B 7 P H 5 /O C 4 C 8 P H 6 /O C 2 B 9 P B 4 /O C 2 A /P C IN T 4 1 0 P B 5 /O C 1 A /P C IN T 5 1 1 P B 6 /O C 1 B /P C IN T 6 1 2 P B 7 /O C 0 A /O C 1 C /P C IN T 7 1 3 A R E F PA0/AD0 22 PA1/AD1 23 PA2/AD2 24 PA3/AD3 25 PA4/AD4 26 PA5/AD5 27 PA6/AD6 28 PA7/AD7 29 PC6/A14 31 PC5/A13 32 PC4/A12 33 PC3/A11 34 PC2/A10 35 PC1/A9 36 PC0/A8 37 PD7/T0 38 PG2/ALE 39 PG1/RD 40 PG0/WR 41 PL7 42 PL6 43 PL5/OC5C 44 PL4/OC5B 45 PL3/OC5A 46 PL2/T5 47 PL1/ICP5 48 PL0/ICP4 49 PB3/MISO/PCINT3 50 PB2/MOSI/PCINT2 51 PB1/SCK/PCINT1 52 PB0/SS/PCINT0 53 P K 7 /A D C 1 5 /P C IN T 2 3 A 1 5 P K 6 /A D C 1 4 /P C IN T 2 2 A 1 4 P K 5 /A D C 1 3 /P C IN T 2 1 A 1 3 P K 4 /A D C 1 2 /P C IN T 2 0 A 1 2 P K 3 /A D C 1 1 /P C IN T 1 9 A 1 1 P K 2 /A D C 1 0 /P C IN T 1 8 A 1 0 P K 1 /A D C 9 /P C IN T 1 7 A 9 P K 0 /A D C 8 /P C IN T 1 6 A 8 P F 7 /A D C 7 /T D I A 7 P F 6 /A D C 6 /T D O A 6 P F 5 /A D C 5 /T M S A 5 P F 4 /A D C 4 /T C K A 4 P F 3 /A D C 3 A 3 P F 2 /A D C 2 A 2 P F 1 /A D C 1 A 1 P F 0 /A D C 0 A 0 R E S E T PC7/A15 30 DUINO1
ARDUINO MEGA2560 R3
6 8
2 4
KERAN AIR MASUK
5AR4
6 8
2 4
KERAN AIR KELUAR
kosong.
3.4.2 Evaluasi
Evaluasi berisi uraian tentang proses posisi air dan kontrol air pada tangki
hidroponik secara otomatis.
1. Sistem dapat mengetahui posisi level air.
2. Sistem dapat mengetahui merespon saat air pada tangki
hidroponik dikurangi secara manual.
[image:31.595.91.500.304.704.2]3.4.3 Bagian Komponen Alat
3. Valve masuk air dari penampung nutrisi
4. Pot tanaman.
5. Tempat pot tanaman yang berfungsi menahan pot.
6. Tangki hidroponik yang berfungsi untuk menampung cairan nutrisi. Pada
tangki ini terdapat sensor kapasitif yang berfungsi untuk mengetahui kondisi
level air.
7. Valve keluar air yang berfungsi untuk menahan air dan berfungsi sebagia
pintu keluar.
8. Kotak elektro yang berfungsi untuk melindungi komponen elektro yang
diletakkan didalamnya. Didalam wadah tersebut terdapat komponen:
a. Mikrokontroler Arduino Mega yang berfungsi sebagai pengontrol.
b. RTC1307 yang berfungsi sebagai pewaktu.
c. Rangkaian driver relay sebagai driver untuk solenoid valve.
d. LCD 16x2
e. LCD I2C backpack
9. Kotak elektro yang melindungi power supply.
3.4.4 Ukuran Dimensi Alat
Setelah semua komponen tambahan dari penelitian ini dipasangkan ukuran
dimensi dari alat:
Ukuran alat : 75 cm (panjang) x 50 cm (lebar) x 40cm (tinggi).
Bak Air(2 buah) : 70.5 cm (panjang) x 24 cm (lebar) x 20.1 cm
(tinggi)
1. Aluminium
2. Mur dan baut.
3. Bak Plastik
c. Bagian dari penggerak alat
1. Solenoid Valve 24 volt
3.5 Pembuatan Perangkat Keras
3.5.1 Perancangan Microkontroler Arduino
Pada tugas akhir ini dibuat beberapa buah pengendali menggunakan
mikrokontroler keluaran pada perangkat lunak IDE Arduino 1.6.6, yaitu Arduino
mega. Untuk menjalankan mikrokontroler ini diperlukan catu daya 5 volt sebagai
tegangan circuit.
Arduino Mega ini dirancang untuk microkontroler ATMega328. Berikut
Gambar 3.6 Rangkaian Board Arduino Mega
Arduino mega dapat diaktifkan melalui koneksi USB atau dengan catu
daya eksternal. Sumber daya dipilih secara otomatis. Eksternal (non-USB) dapat
di ambil baik berasal dari AC ke adaptor DC atau baterai. Adaptor ini dapat
dihubungkan dengan mencolokkan plug jack pusat-positif ukuran 2.1mm
konektor power. Ujung kepala dari baterai dapat dimasukkan kedalam ground dan
Vin pin header dari konektor power. Kisaran kebutuhan daya yang disarankan
untuk board arduino mega adalah 7 sampai dengan 12 volt, jika diberi daya
kurang dari 7 volt kemungkinan pin 5volt. Arduino Mega dapat beroperasi tetapi
tidak stabil kemudian jika diberi daya lebih dari 12volt, regulator tegangan bisa
panas dan dapat merusak boardarduino mega. Berikut adalah konfigurasi pin I/O
Port COM 21 LCD I2C & RTC1307
Port Digital 22 Sensor air penuh
Port Digital 24 Sensor air setengah
Port Digital 26 Sensor air kurang
Port Digital 51 Solenoid Masuk
Port Digital 53 Solenoid Keluar
3.5.2 Rangkaian Sensor Kapasitif
Rangkaian ini dibuat berdasar rangkaian resistor pull-up yang dirangkai
sedemikian rupa sehingga dapat digunakan sebagai sensor ketinggian air yang
kemudian output dari rangkaian tersebut digunakan sebagai pemicu, seperti pada
[image:35.595.91.508.114.534.2]Gambar 3.7 Skematik Perancangan Rangkaian Sensor Kapasitif
3.5.3 Perancangan LCD (Liquid Crystal Display)
Pada perancangan LCD juga diletakkan di atas box yang telah dibuat.
Tujuan LCD diletakkan di dalam box untuk memudahkan pengguna melihat
informasi yang ditampilkan LCD sesuai dengan program yang diinginkan.
Sedangkan komponen I2C LCD diletakkan di dalam box, sama dengan
mikrokontroler-mikrokontroler yang digunakan pada perancangan. Tujuan LCD
dan I2C LCD diletakkan pada box agar pengaturan komponen lebih rapi dan tidak
membutuhkan kabel panjang. Rancangan elektronika ditunjukkan pada Gambar
Gambar 3.8 Skematik Perancangan LCD (Liquid Crystal Display)
3.6 Perancangan Rangkaian Solenoid Valve
Pada alat ini juga digunakan Solenoid Valve digunakan sebagai pintu
masuk air ke tangki hidroponik yang dikendalikan dengan modul relay untuk saat
Gambar 3.9 Skematik Perancangan Solenoid Valve
3.7 Perancangan Perangkat Lunak
Selain perancangan perangkat keras (hardware), dibutuhkan juga
perancangan perangkat lunak (software). Perancangan ini dilakukan dengan tujuan
agar sistem berjalan sesuai dengan keinginan.
Kosong?
Cek waktu pengurasan Tidak
Buka Valve_Masuk Tidak Terpicu?
Tutup Valve_Masuk
Buka Valve_Keluar Sensor_Kurang
Terpicu? Tidak
Tutup Valve_Keluar
Ya
Ya
Tidak Ya
[image:39.595.91.504.73.654.2]Tidak
Gambar 3.10 Flowchart Program Tangki Hidroponik
Proses yang dilakukan program tangki hidroponik dapat dilihat pada flow
yang digunakan. Kemudian pengecekan bak dilakukan. Ketika bak tidak kosong,
maka cek pengurasan akan dilakukan. Jika bak kosong, pengisian akan dilakukan.
Pada saat pengisian bak, mikrokontroler akan menunggu input dari sensor yang
terpasang pada bak. Ketika air pada bak belum menjangkau titik maksimum dari
sensor, proses pengisian akan terus berlanjut. Jika air pada bak telah menjangkau
titik maksimum pada sensor, maka proses pengisian akan berakhir dan beralih
pada tahap selanjutnya. Setelah dua minggu dari waktu setting akan dilakukan
pengurasan.. Ketika masih belum memenuhi waktu yang telah ditentukan, proses
akan berlanjut ke pengecekan bak. Jika sudah mencapai waktunya, maka
pengurasan akan dilakukan. Setelah proses pengurasan selesai dilakukan, proses
36
sederhana menuju ke yang lengkap. Pengujian dilakukan meliputi pengujian
perangkat keras (hardware) dan perangkat lunak (software) diharapkan didapat
suatu system yang dapat menjalankan rancangan alat yang berjalan dengan baik
dan optimal.
4.1 Pengujian Arduino Mega 4.1.1 Tujuan Pengujian
Pengujian Arduino Mega bertujuan mengetahui kinerja Arduino Mega
dalam melakukan proses upload program sehingga dapat dinyatakan bahwa
Arduino Mega dapat digunakan dan berjalan dengan baik.
4.1.2 Alat yang dibutuhkan 1. Rangkaian Arduino Mega.
2. Rangkaian Power.
3. Adaptor 12V – 1 A.
4.1.3 Prosedur Pengujian
1. Hubungkan adaptor 12V dengan rangkaian power.
2. Hubungkan Arduino Mega dengan rangkain power.
3. Hubungkan Arduino Mega dengan komputer menggunakan komunikasi
serial.
4. Buka aplikasi Arduino IDE.
5. Buka sketch yang akan di upload.
6. Tekan menu upload pada aplikasi Arduino IDE dan tunggu hingga proses
upload selesai.
4.1.4 Hasil Pengujian
Dari percobaan di atas hasil compile dapat dilihat pada gambar 4.1 dan
[image:42.595.91.513.199.714.2]hasil load berhasil dapat dilihat pada gambar 4.2
Gambar 4.2 Tampilan Load berhasil
4.2 Pengujian Modul Relay 4.2.1 Tujuan Pengujian
Driver relay digunakan untuk perantara antara mikrokontroler dengan
aktuator pada alat ini agar mikrokontroler dapat memicu pergerakan dari akuator.
Misalnya pada alat ini adaah solenoid valve 24 vdc. Tujuan dari pengujian ini
adalah untuk melihat mikrokontroler dapat memicu pergerakan aktuator melalui
driver relay tersebut.
4.2.2 Alat yang digunakan
1. Mikrokontroler Arduino Mega.
2. Downloader.
3. Laptop atau PC.
4. Power Supply 24V – 2A.
6. Driver Relay.
7. Solenoid Valve.
4.2.3 Prosedur Pengujian
1. Aktifkan adaptor, colokkan ke mikrokontroler, dan hubungkan ke pin
modul relay.
2. Aktifkan power supply 24 volt dan pasangkan ke tegangan masuk
driver relay.
3. Aktifkan PC dan jalankan program IDE Arduino.
4. Download program untuk mengatur pergerakan satu aktuator yang
telah dibuat ke dalam mikrokontroler Arduino.
4.2.4 Hasil Pengujian
[image:44.595.92.513.219.749.2]Pengujian dengan dua buah solenoid valve dengan input dari mikrokontroler dan driver relay sebagai device perantara dapat dilihat pada Tabel4.1
Tabel 4.1 Hasil Pengujian Driver Relay No. Pin Input Input Aktuator
1 Input 1
Input 2
LOW
LOW
SolenoidValve 1: Off
SolenoidValve 2: Off
2 Input 1
Input 2
HIGH
LOW
SolenoidValve 1: On
SolenoidValve 2:Off
3 Input 1
Input 2
LOW
HIGH
SolenoidValve 1: Off
SolenoidValve 2: On
4 Input 1
Input 2
HIGH
HIGH
SolenoidValve 1: On
4.3.2 Alat yang digunakan
Peralatan yang dibutuhkan untuk pengujian ini adalah sebagai berikut:
1. Rangkaian mikrokontroler Arduino Mega
2. Kabel Downloader.
3. PC atau Laptop.
4. Program IDE Arduino.
5. Adaptor 1000mA - 12V.
6. Sensor kapasitif
7. Air
4.3.3 Prosedur Pengujian
1. Aktifkan power supply.
2. Sambungkan mikrokontrolerdengan kabel donwloader.
3. Selanjutnya jalankan PC dan jalankan program IDE Arduino
4. Download program untuk mengatur sensor kapasitif yang telah dibuat
kedalam mikrocontroler.
4.3.4 Hasil Pengujian
Karena sensor ini di set dengan active low. Maka ketika diberi air, input
low maka akan membuat sensor kapasitif menjadi aktif, dan ketika diberi input
[image:46.595.94.509.224.532.2]high maka sensor kapasitif tidak aktif. Yang ditunjukkan oleh tabel 4.2.
Tabel 4.2 Hasil Pengujian sensor kapasitif
No Input sensor kapasitif Status sensor kapasitif
1 High Tidak Aktif
2 Low Aktif
Pada pengujian ini terdapat tiga input untuk sensor kapasitif, dimana pada
input high status sensor kapasitif tidak aktif dan ketika input sensor kapasitif low
status sensor kapasitif aktif. Aktif dalam arti ketika kena air sensor kapasitif low
dan jika sensor kapasitif mati dalam arti tidak kena air sensor kapasitif high.
4.4 Pengujian LCD (Liquid Cristal Display) 4.4.1 Tujuan Pengujian
Pengujian LCD (Liquid Cristal Display) bertujuan untuk mengetahui
apakah LCD (Liquid Cristal Display) dapat terkoneksi dengan Mikrokontroler
dan dapat berjalan dengan baik sesuai dengan tampilan yang diharapkan program
yang telah dibuat dan dapat digunakan.
4.4.2 Alat Yang Dibutuhkan 1. Rangkaian Arduino Mega.
2. LCD (Liquid Cristal Display).
4. Pastikan sketch telah di upload.
4.4.4 Hasil Pengujian
Dari percobaan di atas apabila LCD (Liquid Cristal Display)
menunjukkan tampilan yang sesuai dengan sketch yang telah dibuat dan di upload
sebelumnya pada Arduino Mega seperti pada gambar 4.3, maka dapat dikatakan
LCD (Liquid Cristal Display) dapat berfungsi dengan baik dan dapat digunakan
[image:47.595.91.502.303.625.2]dalam penelitian ini.
4.5 Pengujian Kontrol Pengisian Air 4.5.1 Tujuan Pengujian
Untuk mengetahui tanggapan sistem terhadap perubahan input dan tanggapan
ketika waktu pengisian tercapai.
4.5.2 Alat yang digunakan
1. Rangkaian mikrokontroler Arduino Mega.
2. Kabel Downloader.
3. PC atau Laptop.
4. Program IDE Arduino.
5. Adaptor 1000mA - 12V.
6. Sensor kapasitif.
7. Solenoid Valve.
8. Air.
4.5.3 Prosedur Pengujian
1. Aktifkan power supply.
2. Sambungkan mikrokontrolerdengan kabel donwloader.
3. Selanjutnya jalankan PC dan jalankan program IDE Arduino
4. Download program untuk mengatur sensor kapasitif yang telah dibuat
kedalam mikrokontroler.
tingkat terendah, 1 sentimeter . Dan pengisian air berhenti pada saat ketinggian air
[image:49.595.95.511.312.632.2]berada pada tingkat tertinggi, 18 sentimeter dari dasar tangki (54.144 liter).
Tabel 4.3 Tabel Percobaan Pengisian
Percobaan Pengisian Air
NO
Kondisi Awal
Air
Ketinggian Air Awal
(cm)
Kondisi Air Tujuan
(cm)
Ketinggian Air akhir
(cm)
Kesalahaan Pengosongan
Air Keterangan
1 Penuh 1 18 18 0 Berhasil
2 Penuh 1 18 18 0 Berhasil
3 Penuh 1 18 18 0 Berhasil
4 Penuh 1 18 18 0 Berhasil
5 Penuh 1 18 18 0 Berhasil
6 Setengah 10 18 18 0 Berhasil
7 Setengah 10 18 18 0 Berhasil
8 Setengah 10 18 18 0 Berhasil
9 Setengah 10 18 18 0 Berhasil
10 Setengah 10 18 18 0 Berhasil
11 Kosong 18 18 18 0 Berhasil
12 Kosong 18 18 18 0 Berhasil
13 Kosong 18 18 18 0 Berhasil
14 Kosong 18 18 18 0 Berhasil
Berikut adalah penjelasan dari tabel 4.3. Pada tabel diatas adalah hasil
percobaan dari proses pengisian. Percobaan pengisian dilakukan sebanyak 15 kali.
Dan dari 15 percobaan pengisian didapat 15 keberhasilan proses pengisian.
Dengan kondisi yang berbeda-beda. Dan dari 15 percobaan pengisian didapat 5
keberhasilan proses pengisian. Dan dari 15 percobaan pengisian setengah didapat
5 keberhasilan proses pengisian. Dan dari 15 percobaan penuh didapat 5
keberhasilan pengisian. Dan tingkat keberhasilan 100 %
4.6 Pengujian Kontrol Pengosongan Air 4.6.1 Tujuan Pengujian
Untuk mengetahui tanggapan sistem terhadap perubahan input dan tanggapan
ketika waktu pengisian tercapai.
4.6.2 Alat yang digunakan
1. Rangkaian mikrokontroler Arduino Mega.
2. Kabel Downloader.
3. PC atau Laptop.
4. Program IDE Arduino.
5. Adaptor 1000mA - 12V.
6. Sensor kapasitif.
7. Solenoid Valve.
kedalam mikrokontroler.
5. Penampung air dengan sensor kapasitif diisi air sampai max.
6. Buka lubang pembuangan pada tangki hidroponik untuk mengurangi air
secara manual.
4.6.4 Hasil Pengujian
percobaan dari proses pengosongan. Percobaan pengosongan dilakukan
[image:51.595.95.517.306.753.2]sebanyak 15 kali. Dari proses air kondisi penuh.
Tabel 4.4 Tabel Percobaan Pengosongan
Percobaan Pengosongan Air
NO
Kondisi Awal Air
Ketinggian Air Awal
(cm)
Kondisi Air Tujuan
(cm)
Ketinggian Air akhir
(cm)
Kesalahaan Pengosongan
Air Keterangan
1 Kosong 1 1 1 0 Berhasil
2 Kosong 1 1 1 0 Berhasil
3 Kosong 1 1 1 0 Berhasil
4 Kosong 1 1 1 0 Berhasil
5 Kosong 1 1 1 0 Berhasil
6 Setengah 10 1 1 0 Berhasil
7 Setengah 10 1 1 0 Berhasil
8 Setengah 10 1 1 0 Berhasil
9 Setengah 10 1 1 0 Berhasil
10 Setengah 10 1 1 0 Berhasil
11 Penuh 18 1 1 0 Berhasil
12 Penuh 18 1 1 0 Berhasil
13 Penuh 18 1 1 0 Berhasil
14 Penuh 18 1 1 0 Berhasil
Berikut adalah penjelasan pada tabel 4.4. Pada tabel diatas adalah hasil
percobaan dari proses pengosongan. Percobaan pengosongan dilakukan sebanyak
15 kali. Dan dari 15 percobaan pengosongan didapat 5 keberhasilan proses
pengosongan. Dan dari 15 percobaan pengosongan setengah didapat 5
keberhasilan proses pengosongan. Dan dari 15 percobaan proses pengosongan
didapat 15 keberhasilan pengosongan. Dan tingkat keberhasilan 100 %
4.7 Pengujian Keseluruhan Sistem 4.7.1 Tujuan Pengujian
Untuk mengetahui tanggapan sistem terhadap perubahan input dan tanggapan
ketika waktu pengisian tercapai.
4.7.2 Alat yang digunakan
1. Rangkaian mikrokontroler Arduino Mega.
2. Kabel Downloader.
3. PC atau Laptop.
4. Program IDE Arduino.
5. Adaptor 1000mA - 12V.
6. Sensor kapasitif.
7. Solenoid Valve.
8. Air.
4.7.3 Prosedur Pengujian
6. Buka lubang pembuangan pada tangki hidroponik untuk mengurangi air
secara manual.
4.7.4 Hasil pengujian
Pengujian ini dilakukan dengan keseluruhan alat, diuji mulai dari
pengosongan air, pengisian air sesuai dengan target. Pengisian air dilakukan
dengan target ketinggian 18 cm, jika sudah 18 maka solenoid valve akan menutup,
dan pengosongan air dilakukan dengan target wadah kosong. Dan dicoba dengan
[image:53.595.94.525.299.748.2]air kondisi setengah dan dilakukan sebanyak 8 kali.
Tabel 4.5 Tabel Pengujian Pengosongan Dan Pengisian
NO Proses
Ketinggian Air Awal
(cm) Target
Ketinggian Air Akhir
(cm)
Kesalahan dalam pengisian
dan
pengosongan Keterangan
1 Pengosongan 18 1 1 0 Berhasil
2 Pengosongan 18 1 1 0 Berhasil
3 Pengosongan 18 1 1 0 Berhasil
4 Pengosongan 18 1 1 0 Berhasil
5 Pengosongan 18 1 1 0 Berhasil
6 Pengisian 1 18 18 0 Berhasil
7 Pengisian 1 18 18 0 Berhasil
8 Pengisian 1 18 18 0 Berhasil
10 Pengisian 1 18 18 0 Berhasil
Berikut adalah penjelasan pada tabel 4.5. Pada Pengujian ini dilakukan
dengan keseluruhan alat, diuji mulai dari pengosongan air, pengisian air sesuai
dengan target. Pengisian air dilakukan dengan target ketinggian 18 cm, jika sudah
18 maka solenoid valve akan menutup, dan pengosongan air dilakukan dengan
target wadah kosong. Tingkat keberhasilan seluruh sistem dari pengisian dan
[image:54.595.95.544.314.561.2]pengosongan air, akurasi 100 %, dari pengosongan sampai dengan pengisian air.
Tabel 4.6 Pengujian Kontrol Air Untuk Perawatan
No Proses
Ketinggian Air Awal
(cm)
Target
Ketinggian Air Akhir
(cm)
Kesalahaan Dalam Pengisian
Hasil Keterangan
1 Percobaan 10 18 18 0 0 Berhasil
2 Percobaan 10 18 18 0 0 Berhasil
3 Percobaan 10 18 18 0 0 Berhasil
4 Percobaan 10 18 18 0 0 Berhasil
5 Percobaan 10 18 18 0 0 Berhasil
6 Percobaan 10 18 18 0 0 Berhasil
7 Percobaan 10 18 18 0 0 Berhasil
8 Percobaan 10 18 18 0 0 Berhasil
Berikut adalah penjelasan pada tabel 4.6. Pada pengujian di atas dicoba
dengan air kondisi setengah dan dilakukan sebanyak 8 kali, maka diperoleh
keberhasilan sebesar 100 %, dan ditanaman hidroponik tidak berpengaruh pada
pertumbuhan. Jika posisi air berada diketinggian 10 cm atau setengah, disaat air
50
dilakukan untuk semua kondisi dan beberapa kondisi dilakukan secara berulang
untuk memastikan hasil yang valid sesuai program yang telah dibuat pada kontrol
kondisi air secara otomatis pada tanaman hidroponik didapat kesimpulan sebagai
berikut:
1. Dari hasil pengujian pengisian air, didapat tingkat keberhasilan sebesar
100 % dengan target proses pengisian berhenti pada saat sesuai target.
2. Dari hasil pengujian pengosongan air, didapat tingkat keberhasilan
sebesar 100 % dengan target proses pengosongan berhenti pada saat
sesuai target.
3. Dari hasil pengujian pengurasan air, didapat tingkat keberhasilan sebesar
100 % dengan target proses pengurasan dimulai pada saat waktu
5.2 Saran
Dari perancangan yang telah dilakukan dan melekukan pengujian-pengujian
yang dibutuhkan, masih terdapat hal yang dapat di tambahkan agar hasil
rancangan lebih baik lagi, saran dari rancangan ini adalah :
1. Penggunaan solenoid valve dengan diameter pipa yang lebih besar untuk
mendapatkan waktu pengisian dan pengurasan yang lebih cepat.
2. Menggunakan wadah yang lebih ergonomis agar bernilai ekonomi tinggi.
3. Untuk kedepannya alat ini bisa ditambahkan pompa air agar proses
52
Kadir, A. (2013, Januari 17 ). Panduan Praktis Mempelajari Aplikasi
Mikrokontroler & Pemrogramannya Menggunakan Arduino. Yogyakarta.:
CV. Andi Offset. Diambil kembali dari
http://www.engr.usask.ca/classes/EE/392/DataSheets/ULN2803.pdf.
Kadir, A. (2013). Panduan Praktis Mempelajari Aplikasi Mikrokontroler &
Pemrogramannya Menggunakan Arduino. Yogyakarta: Penerbit Andi.
Kadir, A. (2015). Buku pintar Pemrograman arduino. Yogyakarta: Penerbit Andi.
Kho, D. (n.d.). Pengertian Relay dan Fungsinya. Retrieved Februari 23, 2016,
from http://teknikelektronika.com/pengertian-relay-fungsi/
Lingga, P. (1992). Hidroponik Bercocok Tanam Tanpa Tanah. Jakarta: Penerbit
Swadaya.
Marta dinata, y. (2015). ARDUINO itu Mudah. Surabya: elex Media Komputindo.
Munandar, A. (2016, Februari 24). Licuid Crystal Display (LCD) 16 x 2 .
Retrieved from
hhttp://www.leselektronika.com/2012/06/liguid-crustal-display-lcd-16-x-2.html
NUROHMAH, F. (2015). Kalender Nasional Digital Berbasis Mikrokontroler
ATMEGA128 dengan tampilan LCD dan Seven Segment. Yogyakarta:
53 Oktariawan, I. (2013). Pembuatan Sistem Otomasi Dispenser Menggunakan
Mikrokontroler Arduino Mega 2560. Bandar Lampung: Universitas
Lampung.
Suseno, A. A. (2013). Pengendali Nyala Lampu Menggunakan Media Infrah
Merah Berbasis Mikrokontroler. Purwokerto: Universitas Muhammadiyah
Purwokerto.
Syahrul. (2014). Pemrograman Mikrokontroller AVR Bahasa Assembly dan C. .
Bandung: Informatika.
Tani, K. (2016, januari 17). Budidaya Kangkung Dengan Sistem Wick . Retrieved
from
http://kasabtani.blogspot.co.id/2015/07/budidaya-kangkung-dengan-sistem-wick.html.
Vymazal j, K. L. (2008). Wastewater treatment in constructed wetlands with