METODE SEQUENTIAL QUADRATIC PROGRAMMING (SQP)
UNTUK MENYELESAIKAN PERSOALAN NONLINEAR
BERKENDALA
SKRIPSI
YANI
070803040
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
METODE SEQUENTIAL QUADRATIC PROGRAMMING (SQP) UNTUK MENYELESAIKAN PERSOALAN NONLINEAR BERKENDALA
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
YANI 070803040
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : METODE SEQUENTIAL QUADRATIC
PROGRAMMING (SQP) UNTUK
MENYELESAIKAN PERSOALAN
NONLINEAR BERKENDALA
Kategori : SKRIPSI
Nama : YANI
Nomor Induk Mahasiswa : 070803040
Program Studi : SARJANA (S1) MATEMATIKA
Departemen : MATEMATIKA
Fakultas :MATEMATIKA DAN ILMU
PENGETAHUAN ALAM (FMIPA)
UNIVERSITAS SUMATERA UTARA
Diluluskan di
Medan, 2011
Komisi Pembimbing :
Pembimbing II Pembimbing I
Drs. Liling Perangin-angin, M.Si Prof.Dr. Herman Mawengkang NIP. 19470714 198403 1 001 NIP. 19461128 197403 1 001
Diketahui/ Disetujui oleh
Departemen Matematika FMIPA USU Ketua
Prof. Dr. Tulus, M.Si
PERNYATAAN
METODE SEQUENTIAL QUADRATIC PROGRAMMING (SQP) UNTUK MENYELESAIKAN PERSOALAN NONLINEAR BERKENDALA
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 2011
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan yang Maha Penyayang, atas kemurahan dan berkat yang telah diberikan sehingga penulis dapat menyelesaikan skripsi dengan judul ”Metode Sequential Quadratic Programming (SQP) untuk Menyelesaikan Persoalan Nonlinear Berkendala” guna melengkapi syarat memperoleh gelar sarjana Matematika pada Fakultas Matematika dan Ilmu Pengetahuan Alam di Universitas Sumatera Utara.
Penulis mengucapkan terima kasih kepada Bapak Prof. Dr. Herman Mawengkang selaku Pembimbing I dan Bapak Drs. Liling Perangin-angin, M.Si selaku Pembimbing II atas segala bimbingan, arahan, nasehat, saran, dan kesediaan meluangkan waktu, tenaga, pikiran, dan bantuan pengetahuan. Penulis juga menyadari keterlibatan berbagai pihak yang membantu dalam penyelesaian skripsi ini. Oleh karena itu penulis mengucapkan terima kasih kepada :
1. Bapak Dr. Sutarman, M.Sc selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
2. Bapak Prof.Dr.Tulus, M.Si dan Ibu Dra. Mardiningsih, M.Si selaku Ketua dan Sekretaris Departemen Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
3. Bapak Prof. Dr. Drs. Iryanto, M.Si dan Bapak Drs. Suwarno Ariswoyo, M.Si selaku komisi penguji atas saran dan masukan yang telah diberikan demi perbaikan skripsi ini.
4. Seluruh Staf Pengajar dan Pegawai Departemen Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara segala ilmu dan bantuan yang diberikan kepada penulis selama mengikuti perkuliahan.
5. Kedua orang tua serta adik penulis yang telah memberikan doa, bimbingan dan dorongan serta bantuan baik material maupun nonmaterial kepada penulis sehingga selesainya skripsi ini.
6. Teman-teman stambuk’07 yang tidak dapat ditulis satu per satu yang turut membantu dan memberikan doa dan semangat untuk menyelesaikan skripsi ini.
ABSTRAK
Metode Sequential Quadratic Programming (SQP) mengubah persoalan pemrograman nonlinear berkendala menjadi persoalan pemrograman kuadratis tanpa harus mengkonversikan ke barisan persoalan minimisasi yang tidak berkendala. Metode SQP menghasilkan solusi dalam setiap iterasi yang konvergen ke suatu solusi optimal. Metode ini dapat diterapkan hingga dalam persoalan berskala besar.
SEQUENTIAL QUADRATIC PROGRAMMING (SQP) TO SOLVE CONSTRAINED NONLINEAR PROBLEM
ABSTRACT
Sequential Quadratic Programming (SQP) method changes constrained nonlinear programming problem into quadratic programming problem without convert to be sequences of unconstrained minimization problem. SQP method produces solution in each iteration which converges to optimal solution. This method can be applied in large scale problem.
DAFTAR ISI
3.1 Persoalan Nonlinear dengan Kendala Persamaan 23 3.2 Persoalan Nonlinear dengan Kendala Pertidaksamaan 32
Bab 4 Kesimpulan dan Saran
4.1 Kesimpulan 46
4.2 Saran 47
DAFTAR TABEL
Tabel Halaman
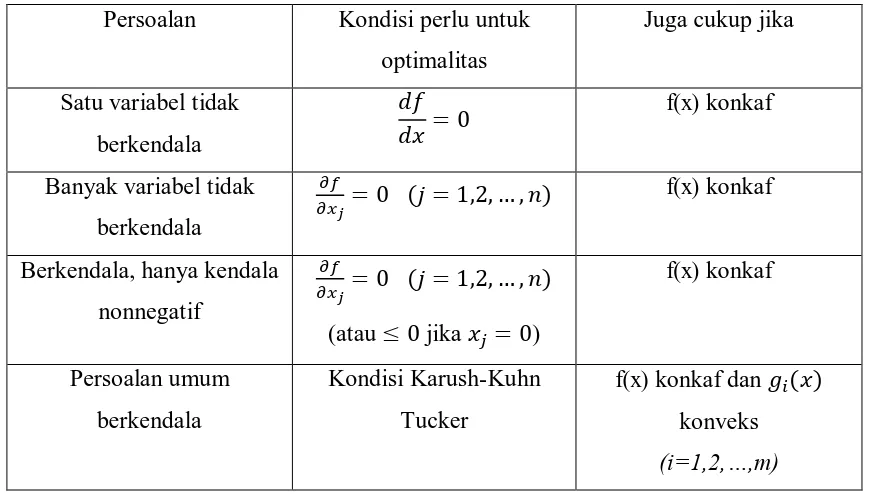
1.1 Kondisi Perlu dan Cukup untuk Optimalitas 18
2.2 Hasil Perhitungan dengan Kendala Persamaan 32
DAFTAR GAMBAR
Gambar Halaman
1.1 Maksimum-minimum lokal dan global 10
1.2 Fungsi konveks dan konkaf 11
ABSTRAK
Metode Sequential Quadratic Programming (SQP) mengubah persoalan pemrograman nonlinear berkendala menjadi persoalan pemrograman kuadratis tanpa harus mengkonversikan ke barisan persoalan minimisasi yang tidak berkendala. Metode SQP menghasilkan solusi dalam setiap iterasi yang konvergen ke suatu solusi optimal. Metode ini dapat diterapkan hingga dalam persoalan berskala besar.
SEQUENTIAL QUADRATIC PROGRAMMING (SQP) TO SOLVE CONSTRAINED NONLINEAR PROBLEM
ABSTRACT
Sequential Quadratic Programming (SQP) method changes constrained nonlinear programming problem into quadratic programming problem without convert to be sequences of unconstrained minimization problem. SQP method produces solution in each iteration which converges to optimal solution. This method can be applied in large scale problem.
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Zaman yang semakin berkembang membuat persoalan semakin kompleks, tidak terkecuali persoalan yang melibatkan persoalan matematika. Dalam pemecahannya, matematika memegang peranan cukup penting terutama dalam perkembangan ilmu pengetahuan dan teknologi baik secara matematika murni maupun matematika terapan.
Matematika terapan misalnya dijumpai dalam perkembangan bidang industri yang menghendaki tercapainya suatu kondisi yang optimal yang sebelumnya hanya persoalan sederhana yang berbentuk linear karena perkembangan zaman, kompleksitas semakin meningkat sehingga memunculkan persoalan yang berbentuk nonlinear. Hal tersebut disebabkan karena munculnya faktor-faktor yang membuat ketaklinearan suatu fungsi. Selain itu, banyak faktor-faktor yang menjadi penghambat dalam optimisasi sehingga memunculkan satu atau lebih kendala dalam mengoptimalkan suatu fungsi.
Banyak metode yang telah dikembangkan untuk memecahkan persoalan nonlinear di antaranya seperti Metode Pengali Lagrange, Metode Karush-Kuhn Tucker. Akan tetapi, metode-metode tersebut sering tidak dapat digunakan untuk persoalan program nonlinear berskala besar.
mengkonversikan ke barisan persoalan minimimisasi yang tidak berkendala. Metode ini mengkonversi persoalan nonlinear menjadi bentuk persoalan pemrograman kuadratis.
Berdasarkan uraian di atas maka penulis memberi judul tulisan ini dengan “Metode Sequential Quadratic Programming (SQP) untuk Menyelesaikan
Persoalan Nonlinear Berkendala”.
1.2 PERUMUSAN MASALAH
Permasalahan yang akan dibahas adalah menyelesaikan persoalan nonlinear berkendala dengan metode Sequential Quadratic Programming (SQP).
1.3 TINJAUAN PUSTAKA
Menurut Bradley dkk (1976), persoalan umum optimisasi adalah memilih n variabel keputusan dari daerah fisibel yang diberikan untuk mengoptimasi (maksimum atau minimum) fungsi tujuan yang diberikan
dari variabel keputusan. Persoalan ini disebut persoalan pemrograman nonlinear jika fungsi tujuannya nonlinear dan atau daerah fisibelnya ditentukan oleh kendala nonlinear. Bentuk umumnya:
subject to:
adalah dimana untuk setiap dua titik y dan z, dapat ditarik garis yang menghubungkan f(y) dan f(z) pada fungsi tersebut.
Kekonvergenan untuk barisan bilangan riil (Dennis dan Schnabel, 1983): Diberikan sebuah metode iterasi sehingga menghasilkan barisan titik dari Operation Research”, menyatakan bahwa persamaan Lagrange dari persoalan nonlinear seperti yang telah dipaparkan yaitu sebagai berikut:
dimana adalah tetapan-tetapan (yang tidak diketahui) yang disebut pengali Lagrange. Kemudian kita pecahkan sistem n+ m persamaan
Syarat Kuhn-Tucker: (Winston dan Venkataramanan, 2003)
Application” menjelaskan bahwa pemrograman kuadratis merupakan persoalan optimasi nonlinear dimana fungsi tujuannya adalah fungsi minimisasi yang konveks dan semua kendalanya berbentuk persamaan atau pertidaksamaan linear. Bentuk umum persoalan pemrograman kuadaratis adalah sebagai berikut:
persoalan linear. Karena D adalah matriks definit positif maka f(x) adalah fungsi strictly convex.
Menurut Winston dan Venkataramanan (2003), metode untuk menyelesaikan persoalan pemrograman kuadratis yaitu metode Wolfe. Pertama, semua fungsi tujuan dan kendala harus ditambahkan variabel buatan pada masing-masing kendala dengan kondisi Kuhn-Tucker dan variabel basis belum jelas kemudian minimumkan jumlah variabel buatan. Metode wolfe merupakan versi modifikasi dari fase I pada metode simplex dua fase. Untuk menjamin bahwa solusi akhir (dengan variabel buatan sama dengan nol) memenuhi kondisi complementary slackness, metode Wolfe memodifikasi pilihan variabel simplex yang masuk:
1. Tidak diperbolehkan dari kendala ke-i dan kedua-duanya sebagai variabel basis.
2. Tidak diperbolehkan variabel slack atau excess dari kendala ke-i dan kedua-duanya sebagai variabel basis.
Dimitri P Bertsekas (2007) dalam jurnalnya yang berjudul “SQP and PDIP
Algorithms for Nonlinear Programming” dikatakan bahwa metode Sequential
Quadratic Programming digunakan untuk menyelesaikan persoalan nonlinear yang memiliki kendala dalam bentuk persamaan dengan bentuk umum :
Min. f(x) s.t. h(x)=0
Metode Sequential Quadratic Programming menyerupai metode Newton yang digunakan untuk mencari penyelesaian pada optimisasi tidak berkendala. Ide utama dari SQP adalah memodelkan persoalan kendala yang berbentuk persamaan pada titik awal kemudian mencari pendekatan dengan subpersoalan pemrograman kuadratis berbentuk:
Metode Sequential Quadratic Programming atau yang juga dikenal sebagai metode Lagrange-Newton karena metode SQP merupakan penggabungan dari kedua metode tersebut. Algoritmanya adalah sebagai berikut:
1. Tentukan 2. Atur k=0
3. Ulang
4. Pecahkan sistem Langrange-Newton untuk menemukan 5.
6.
7. Sampai konvergen
Metode SQP merupakan aplikasi dari metode Newton dengan memenuhi kondisi optimal KKT. Menurut Mark S. Gockenbach dalam jurnalnya yang berjudul “Introduction to Sequential Quadratic Programming”, metode SQP mencoba untuk memecahkan persoalan nonlinear secara langsung daripada mengubahnya ke barisan persoalan minimisasi yang tidak berkendala. Ide dasar analog dengan metode Newton untuk persoalan minimisasi yang tidak berkendala. Metode SQP dapat digunakan untuk menyelesaikan persoalan aplikasi yang kompleksitasnya tinggi (Schittkowski dan Yuan, 2010)
1.4 TUJUAN PENELITIAN
Tujuan dari penelitian ini adalah untuk mendapatkan penyelesaian dari persoalan nonlinear berkendala.
1.5 KONTRIBUSI PENELITIAN
Manfaat dari penelitian ini adalah
2. Digunakan sebagai tambahan informasi dan referensi bacaan untuk mahasiswa matematika, terlebih bagi mahasiswa yang hendak melakukan penelitian serupa.
1.6 METODE PENELITIAN
Penelitian ini adalah penelitian literatur yang disusun dengan langkah-langkah sebagai berikut:
1. Membaca dan memahami persoalan pemrograman nonlinear dari buku dan jurnal.
2. Mengambil contoh soal untuk dikerjakan sesuai dengan langkah-langkah yang telah didapat dari jurnal-jurnal.
BAB 2
LANDASAN TEORI
Pada bab ini akan dijelaskan mengenai teori – teori yang berhubungan dengan pembahasan ini sehingga dapat dijadikan sebagai landasan berpikir dan akan mempermudah dalam hal pembahasan hasil utama pada bab berikutnya. Adapun teori – teori tersebut mencakup pengertian dari pemrograman nonlinear, fungsi konveks, metode Lagrange, metode Newton, metode Wolfe, kondisi Kuhn-Tucker, pemrograman kuadratis, dan metode Sequential Quadratic Programming.
2.1 Pemrograman Nonlinear
Menurut Bradley dkk (1976), persoalan umum optimisasi adalah memilih n variabel keputusan dari daerah fisibel yang diberikan untuk mengoptimasi (maksimum atau minimum) fungsi tujuan yang diberikan
dari variabel keputusan. Persoalan ini disebut persoalan pemrograman nonlinear jika fungsi tujuannya nonlinear dan atau daerah fisibelnya ditentukan oleh kendala nonlinear. Jadi bentuk minimisasi persoalan pemrograman nonlinear ditulis sebagai:
subject to:
dimana masing-masing fungsi kendala sampai diberikan. Batasan nonnegatif pada variabel dapat dengan menambahkan kendala tambahan:
Masalah optimisasi di atas dapat ditulis dalam bentuk yang lebih sederhana sebagai berikut:
subject to:
Untuk kendala persamaan dapat ditulis sebagai dua kendala pertidaksamaan dan . Sebagai tambahan, jika menambahkan variabel slack, masing-masing kendala pertidaksamaan ditransformasi ke kendala persamaan.
Fokus utama dari pemrograman nonlinear adalah terkait dengan eksistensi dari solusi optimal, karakterisasi dari solusi optimal dan algoritma untuk menghitung solusi optimal. Masalah pemrograman nonlinear mempunyai 2 jenis persoalan yaitu masalah nonlinear berkendala dan nonlinear tidak berkendala. Untuk persoalan nonlinear tidak berkendala dapat dipecahkan dengan metode Newton sedangkan untuk persoalan nonlinear berkendala dapat dipecahkan dengan metode Penalty dan Barrier, Sequential Quadratic Programming (SQP), ataupun Primal-Dual Interior Point (PDIP). Metode Penalty dan Barrier merupakan cara tidak langsung karena prosedur metodenya yaitu mendekati persoalan optimisasi berkendala dengan persoalan yang tidak berkendala. Contoh metode yang menerapkan cara langsung yaitu SQP dan PDIP. (Bertsekas, 2007).
2.2 Optimum Global dan Lokal
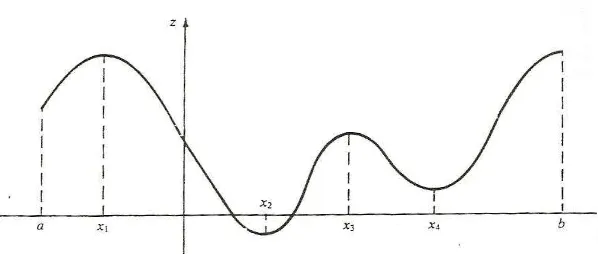
Gambar 1.1 Maksimum-minimum lokal dan global
Fungsi yang digambarkan di atas secara grafik hanya didefiniskan pada [a,b]. Fungsi ini memiliki minimum lokal di ; maksimum lokal di ; minimum global di dan maksimum global di dan b.
Definisi 2.1:
Jika adalah solusi fisibel untuk persoalan maksimisasi dengan fungsi tujuan f(x). Kita menyebut x:
1. Sebuah global maksimum jika untuk setiap titik fisibel
2. Sebuah lokal maksimum jika untuk setiap titik fisibel cukup dekat dengan x yaitu jika ada sebuah bilangan (sangat kecil) sehingga kapanpun masing-masing variabel dalam dari
yaitu, dan y fisibel maka .
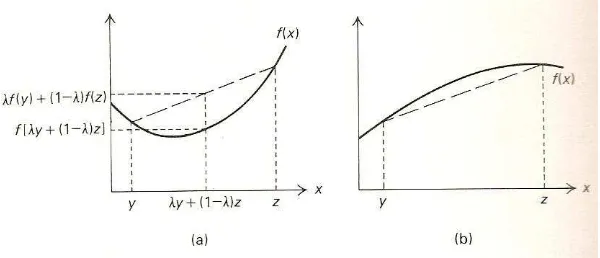
Gambar 1.2 Fungsi konveks dan konkaf
2.3 Fungsi Konveks dan Konkaf
Menurut Luenberger (1984), fungsi konveks adalah dimana untuk setiap dua titik y dan z, dapat ditarik garis yang menghubungkan f(y) dan f(z) pada fungsi tersebut. Secara aljabar definisinya sebagai berikut:
Definisi 2.2:
Misalkan . Titik-titik dengan bentuk untuk disebut konveks kombinasi dari y dan z.
Definisi 2.3:
Sebuah himpunan disebut himpunan konveks jika untuk setiap dan maka berlaku .
Definisi 2.4:
Sebuah fungsi f(x) disebut konveks jika untuk setiap y dan z dan setiap
Disebut strictly konveks jika untuk setiap dua titik berbeda y dan z dan setiap
Definisi 2.5:
Disebut strictly konkaf jika untuk setiap dua titik berbeda y dan z dan setiap
Mengalikan fungsi konveks dengan -1 akan menghasilkan fungsi konkaf. Menjumlahkan beberapa fungsi konveks akan menghasilkan fungsi konveks juga. Begitu juga dengan mengalikan dengan pengali nonnegatif akan menghasilkan fungsi konveks.
Teorema 2.1:
Perhatikan masalah optimisasi (CP) berikut
Jika S adalah himpunan konveks, adalah fungsi konveks dan adalah titik minimum lokal untuk masalah (CP) maka adalah titik minimum global dari
pada himpunan S.
Bukti:
Misalkan bukan titik minimum global, maka terdapat yang memenuhi . Sebut yang merupakan kombinasi konveks dari dan y, untuk . Hal ini mengakibatkan , untuk .
Karena adalah fungsi konveks maka berlaku
Untuk setiap . Hal ini kontradiksi dengan asumsi bahwa adalah minimum lokal. Dengan demikian haruslah merupakan titik minimum global.
Teorema 2.2:
Misalkan S adalah himpunan buka yang konveks dan adalah fungsi yang
diferensiabel. Maka adalah fungsi konveks jika dan hanya jika memenuhi kondisi gradient berikut:
Bukti :
Ambil kombinasi konveks dari dua persamaan ini maka diperoleh
, Ini menunjukkan bahwa f adalah fungsi konveks.
Teorema 2.3:
Dengan demikian pertidaksamaan gradien terpenuhi dan mengakibatkan f(x) merupakan fungsi konveks.
() Jika f(x) konveks dengan dan d sebarang arah. Maka untuk yang cukup kecil, . Dalam hal ini berlaku
dengan menggunakan pertidaksamaan gradien maka diperoleh
Bagi pertidaksamaan ini dengan dan ambil , maka diperoleh
Maka H(x) adalah positif semidefinit untuk setiap .
Teorema 2.4:
Misalkan konveks dan dapat diturunkan di X. Jika minimum global maka
Bukti:
Karena adalah minimum global maka x adalah minimum lokal, dengan demikian jelas bahwa . Sebaliknya jika , maka berlaku
Maka jelas bahwa adalah titik minimum global.
2.4 Metode Newton
Persoalan nonlinear tidak berkendala mempunyai bentuk umum:
dimana dan X adalah himpunan terbuka. Jika maka x dikatakan solusi fisibel. Jika dan meminimumkan maka x dikatakan solusi optimal.
Perhatikan bahwa semua titik minimum lokal dari suatu fungsi yang diferensiabel dan kontinu f memenuhi syarat perlu
Salah satu pendekatan untuk masalah minimisasi f(x) adalah mencari solusi untuk himpunan untuk persamaan dengan memasukkan suatu cara untuk menjamin bahwa solusi yang diperoleh tentunya merupakan sebuah minimum lokal. Metode tertua untuk menyelesaikan suatu himpunan persamaan nonlinear adalah metode Newton.
Perhatikan masalah optimisasi tanpa kendala berikut
Pada titik , f(x) dapat dihampiri dengan
dimana hampiran ini dikenal sebagai ekspansi Taylor Kuadratik pada , dimana dan H(x) adalah vektor gradien dan Hessian dari fungsi f.
Perhatikan bahwa h(x) adalah sebuah fungsi yang kuadratik yang dapat diminimisasi dengan menyelesaikan . Karena gradient dari h(x) adalah
Maka untuk memperoleh solusi cukup diselesaikan
Sehingga diperoleh
Perhatikan bahwa arah disebut sebagai arah Newton di Algoritma metode Newton:
Step 1 : Diberikan x0, set k=0
Step 2 : Set . Jika maka STOP Step 3 : Set step size
Step 4 : Set . Kembali ke step 1
Jika f(x) merupakan fungsi nonkuadratik, metode Newton dapat memberikan solusi yang divergen dan mungkin saja konvergen menuju titik saddle dan titik maksimum yang relatif. Bila hal tersebut terjadi maka metode Newton dapat diimprovisasi dengan mengubah formulasi untuk titik baru
dimana adalah panjangnya langkah tahapan yang minimum pada arah .
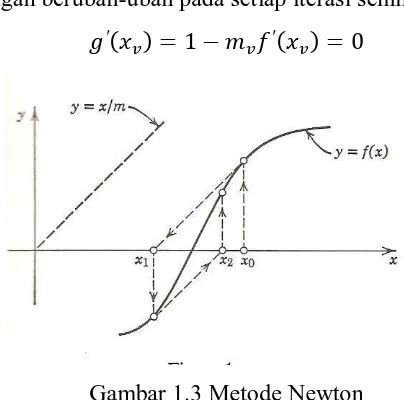
Jika kemiringan berubah-ubah pada setiap iterasi sehingga
Gambar 1.3 Metode Newton
maka prosedur turunan kedua bisa didapatkan. Dari persamaan di atas kita mendapatkan
Sehingga
Jadi, hasil prosedur iterasi sekarang adalah
dengan dan ada, karena
2.5 Kekonvergenan
Kekonvergenan untuk barisan bilangan riil (Dennis dan Schnabel, 1983):
Definisi 2.6
Jika maka barisan dikatakan konvergen ke jika
Jika dalam tambahan, ada sebuah konstanta dan sebuah bilangan bulat sehingga untuk setiap
Teorema Weierstrass untuk barisan
Misalkan adalah barisan tak terbatas (infinit) dari titik-titik dari suatu himpunan compact F (yaitu himpunan yang tertutup dan terbatas). Maka sebagian subbarisan infinit dati titik-titik konvergen ke suatu titik di F.
Teorema Weierstrass untuk fungsi
Misalkan f(x) adalah fungsi bernilai riil dan kontinu pada suatu himpunan compact yang tidak kosong . Maka F memuat suatu titik yang dapat meminimumkan (atau memaksimumkan) f(x) pada himpunan F.
2.6 Metode Pengali Lagrange
Persamaan Lagrange dari persoalan nonlinear seperti yang telah dipaparkan pada bagian 2.1 yaitu sebagai berikut:
dimana adalah tetapan-tetapan (yang tidak diketahui) yang disebut pengali Lagrange. Kemudian kita pecahkan sistem n+ m persamaan
2.7 Kondisi Karush-Kuhn Tucker
Dari tabel di atas terlihat bahwa untuk kondisi persoalan umum disebut kondisi Karush-Kuhn Tucker (Hillier dan Lieberman,2005). Kondisi perlu dan cukup untuk sebagai solusi optimal untuk persoalan nonlinear berikut
Teorema 2.6: disebut kondisi complementa ry slackness yang menyatakan dua kemungkinan yaitu:
1. Jika maka Jika maka kendala
2.8 Pemrograman Kuadratis
kendalanya berbentuk persamaan atau pertidaksamaan linear. Bentuk umum persoalan
Pada fungsi tujuan di atas yaitu suku menyatakan bagian kuadratis dari fungsi tujuan dengan D adalah matriks definit positif simetri. Jika D=0 maka menjadi persoalan linear. Karena D adalah matriks definit positif maka f(x) adalah fungsi strictly convex.
Metode untuk menyelesaikan persoalan pemrograman kuadratis yaitu metode Wolfe. Pertama, semua fungsi tujuan dan kendala harus ditambahkan variabel buatan pada masing-masing kendala dengan kondisi Kuhn-Tucker dan variabel basis belum jelas kemudian minimumkan jumlah variabel buatan. Metode wolfe merupakan versi modifikasi dari fase I pada metode simplex dua fase. Untuk menjamin bahwa solusi akhir (dengan variabel buatan sama dengan nol) memenuhi kondisi complementa ry slackness, metode Wolfe memodifikasi pilihan variabel simplex yang masuk:
1. Tidak diperbolehkan dari kendala ke-i dan kedua-duanya sebagai variabel basis.
2. Tidak diperbolehkan variabel slack atau excess dari kendala ke-i dan kedua-duanya sebagai variabel basis.
2.9 Metode Sequential Quadratic Programming
Menurut Bertsekas (2007), metode Sequential Quadratic Progra mming digunakan untuk menyelesaikan persoalan nonlinear yang memiliki kendala dalam bentuk persamaan dengan bentuk umum :
Min. f(x) s.t. h(x)=0
Kondisi Karush-Kuhn Tucker (KKT) untuk persoalan ini yaitu sebagai berikut:
dimana adalah pengali Lagrange dengan kendala yang berbentuk persamaan. Jika menggunakan persamaan Lagrange
Kondisi Kuhn-Tucker dapat dituliskan sebagai berikut:
Metode Sequential Quadratic Programming menyerupai metode Newton yang digunakan untuk mencari penyelesaian pada optimisasi tidak berkendala.Metode ini menyelesaikan persoalan nonlinear secara langsung daripada mengubah ke barisan persoalan minimisasi yang tidak berkendala. Ide utama dari SQP adalah memodelkan persoalan kendala yang berbentuk persamaan pada titik awal kemudian mencari pendekatan dengan subpersoalan pemrograman kuadratis berbentuk:
dimana
8. Tentukan 9. Atur k=0
10.Ulang
11.Pecahkan sistem Langrange-Newton untuk menemukan 12.
13.
14.Sampai konvergen
BAB 3
PEMBAHASAN
Persoalan nonlinear mempunyai 2 jenis persoalan yaitu persoalan berkendala dan tidak berkendala. Untuk persoalan nonlinear yang tidak berkendala dapat digunakan metode Newton. Sedangkan untuk persoalan nonlinear yang berkendala dapat digunakan metode Pengali Lagrange, metode Karush-Kuhn Tucker, dan sebagainya. Dalam penulisan akan dibahas persoalan nonlinear berkendala yang dipecahkan dengan metode Sequential Quadratic Programming (SQP). Metode ini mengkonversikan bentuk persoalan nonlinear menjadi barisan persoalan pemrograman kuadratis. Metode ini merupakan gabungan dari metode Newton dan Lagrange. Dalam pembahasan ini akan dibahas 2 bentuk kendala yaitu berupa kendala persamaan dan pertidaksamaan.
3.1 Persoalan Nonlinear dengan Kendala Persamaan
Bentuk umum:
Persoalan nonlinear dengan kendala persamaan diselesaikan dengan langkah sebagai berikut:
1. Tentukan 2. Atur k=0
3. Tentukan persamaan Lagrange dari persoalan tersebut 4. Cari
6. Substitusikan nilai pada langkah ke-k
7. Selesaikan subpersoalan dengan metode Pengali Lagrange sehingga didapat
8.
9. Ulangi untuk k=k+1 hingga konvergen ke suatu solusi optimal.
Contoh:
Selesaikan persoalan nonlinear berikut
dengan titik awal dan , dengan menggunakan metode Sequential Quadratic Programming.
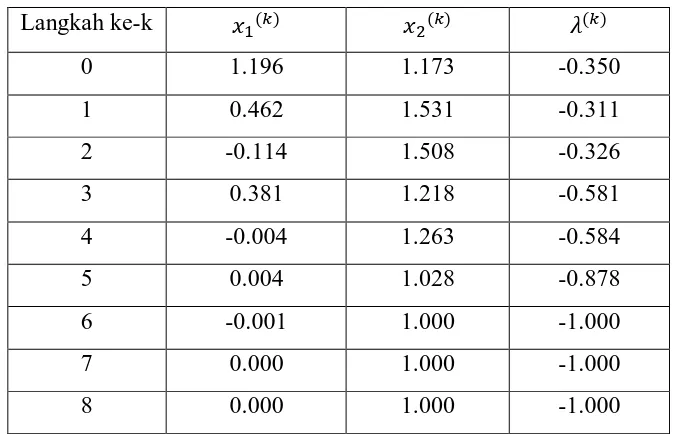
Penyelesaian:
Persamaan Lagrange:
Subpersoalan :
Tabel 1.2 Hasil Perhitungan dengan Kendala Persamaan
Persoalan nonlinear dengan kendala persamaan diselesaikan dengan langkah sebagai berikut:
8.
9. Ulangi untuk k=k+1 hingga konvergen ke suatu solusi optimal.
Contoh:
Selesaikan persoalan nonlinear berikut dengan metode Sequential Quadratic Progra mming
dengan titik awal .
Penyelesaian:
Subpersoalan:
Langkah 0
Kondisi Kuhn-Tucker:
Langkah 1
Kondisi Kuhn-Tucker:
Langkah 2
Kondisi Kuhn-Tucker:
Langkah 3
Kondisi Kuhn-Tucker:
Langkah 4
Kondisi Kuhn-Tucker:
Langkah 5
Kondisi Kuhn-Tucker:
Langkah 6
Kondisi Kuhn-Tucker:
Langkah 7
Kondisi Kuhn-Tucker:
Langkah 8
Kondisi Kuhn-Tucker:
Langkah 9
Kondisi Kuhn-Tucker:
Langkah 10
Kondisi Kuhn-Tucker:
Langkah 11
Kondisi Kuhn-Tucker:
Langkah 12
Kondisi Kuhn-Tucker:
Langkah 13
Kondisi Kuhn-Tucker:
Langkah 14
Kondisi Kuhn-Tucker:
Langkah 15
Kondisi Kuhn-Tucker:
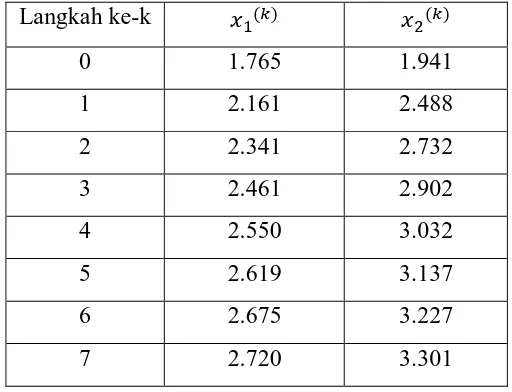
Hasil perhitungan dengan dari setiap langkah dapat dilihat dari tabel berikut ini:
Tabel 1.3 Hasil Perhitungan dengan Kendala Pertidaksamaan
Langkah ke-k
0 1.765 1.941
1 2.161 2.488
2 2.341 2.732
3 2.461 2.902
4 2.550 3.032
5 2.619 3.137
6 2.675 3.227
8 2.758 3.365
9 2.790 3.421
10 2.817 3.470
11 2.840 3.514
12 2.860 3.553
13 2.877 3.588
14 2.892 3.620
15 2.905 3.649
BAB 4
KESIMPULAN DAN SARAN
4.1 Kesimpulan
Dari hasil pembahasan yang telah disajikan sebelumnya, maka dapat disimpulkan bahwa :
1. Persoalan nonlinear dengan kendala persamaan dapat diselesaikan dengan metode SQP yang memecahkan subpersoalan berbentuk pemrograman kuadratis pada tiap iterasi yang akan konvergen ke suatu solusi optimal. Subpersoalan tersebut dapat dipecahkan dengan metode Pengali Lagrange. Dari contoh pada pembahasan sebelumnya didapatkan solusi optimal yaitu .
4.2 Saran
1. Penelitian yang dilakukan hanya sebatas fungsi tujuan berbentuk kuadratik dan kendala kuadratik, akan lebih baik jika dibahas untuk fungsi yang derajatnya lebih tinggi.
DAFTAR PUSTAKA
Bradley, Stephen P, Arnoldo C Max dan Thomas L Magnanti. 1976. Applied Mathematical Programming. USA: Addison-Wesley Publishing Company.
Bronson, Richard. 1996. Teori dan Soal-soal Operations Research. Terjemahan Drs.Hans J. Wospakrik. Jakarta: Erlangga.
Dennis, J.E dan Robert B. Schnabel. 1983. Numerical Methods for Unconstrained Optimization and Nonlinear Equations. New Jersey : Prentice-Hall.
Gockenbach, Mark S.2003. Introduction to Sequential Quadratic Progra mming, hal 1-7.
Hillier, Frederick S dan Gerald J Lieberman. 2005. Introduction to Operations Research. USA : Mc. Graw Hill.
Isaacson, Eugene dan Herbert Bishop Keller. 1966. Analysis of Numerical Methods. New York : John Willey & Sons.
Luenberger, David G. 1984. Linear and Nonlinear Programming. USA : Addison Wesley.
Rao, SS. 1977. Optimization : Theory and application. USA : Wiley Eastern Limited.
Schittkowski, Klaus dan Ya-xiang Yuan. Sequential Quadratic Programming Methods, hal 1-16.
Wallace, Brian. 2004. Constrained Optimization : Kuhn-Tucker Conditions, hal 1-3.