viii ABSTRAK
Penentuan penyelesaian masalah pemrograman nonlinear, seperti masalah pemrograman kuadratik konveks berkendala tidak mudah dilakukan secara ana-litik. Namun, tidak berarti bahwa masalah tersebut tidak dapat diselesaikan. Sa-lah satu metode yang dapat digunakan untuk menyelesaikannya adaSa-lah Metode Himpunan Aktif. Metode himpunan aktif merupakan metode untuk menyelesai-kan masalah pemrograman kuadratik konveks yang melibatmenyelesai-kan kendala berupa persamaan dan pertidaksamaan.
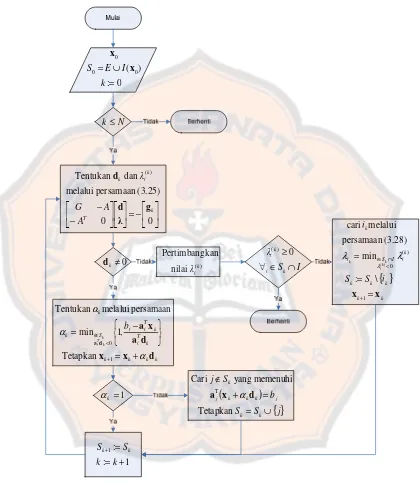
Dalam metode himpunan aktif, yang diselesaikan adalah submasalah pem-rograman kuadratik konveks, yakni dengan membangun sebuah himpunan kerja yang terdiri dari kendala-kendala pertidaksamaan aktif. Kendala-kendala perti-daksamaan aktif digunakan karena memiliki nilai nol pada penyelesaiannya se-hingga dapat digantikan oleh kendala berupa persamaan, sedangkan kendala per-tidaksamaan tidak aktif dapat dihilangkan dari himpunan kerja. Selanjutnya, di-cari penyelesaian untuk arah layak. Jika arah layak sama dengan nol dan syarat Karush-Kuhn-Tucker dipenuhi maka akan diperoleh penyelesaian yang merupa-kan peminimum dari fungsi objektif pada masalah pemrograman kuadratik kon-veks. Jika tidak, maka perlu dibangun himpunan kerja yang lain dan diselesaikan submasalah baru tersebut.
Kelebihan dari metode himpunan aktif, yaitu lebih sederhana perhitun-gannya karena tidak semua kendala digunakan. Tetapi jika pemilihan titik awal tidak tepat atau dengan kata lain titik awal menyebabkan tidak ditemukannya kendala aktif maka akan dibutuhkan banyak iterasi untuk mencapai hasilnya.
ix ABSTRACT
Determination of the solution of nonlinear programming problems, such as the convex quadratic programming problems that involve constraints is not easy done analitcally. However, it does not mean that the problem can not be completed. One of the methods that can be used to solve this problem is Active Set Methods. Active Set Method is a method to solve the problems of convex quadratic programming with involving constrains in the form of equalities and inequalities.
In the Active Set Method, the convex quadratic programming subproblems are solved by first building a working set of active ineqaulity constraints. The active inequality constraints are used because it has zero value on the solution so that it can be replaced by equality constraints, whereas inactive inequality constraints can be removed from a working set. Next, looking for a solution for the feasible direction. If the feasible direction equal to zero and the condition of Karush Kuhn Tucker is satisfied, so it will be obtained a solution that is the minimizer of objective function in the convex quadratic programming problems. If not, it is necessary to build another working set and solved the new subprobems.
The advantages of the Active Set Method that is simpler in its computation because not all constraints are used. But if the selection of starting point is not appropriate or in other words, the starting point causes not to find active constraints then it needs much iteration to achieve the results.
Keywords: active set, Karush-Kuhn-Tucker, convex, Lagrange multiplier, feasi-ble direction.
METODE HIMPUNAN AKTIF UNTUK
MENYELESAIKAN MASALAH PEMROGRAMAN KUADRATIK
Skripsi
Diajukan untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Sains
Program Studi Matematika
Oleh: Yudith Kase NIM: 083114014
PROGRAM STUDI MATEMATIKA JURUSAN MATEMATIKA
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
ACTIVE SET METHODSTO SOLVE
QUADRATIC PROGRAMMING PROBLEMS
Thesis
Presented as Partial Fulfillment of the Requirements to obtain The Sarjana Sains Degree
in Mathematics
By: Yudith Kase
Student Number : 083114014
MATHEMATICS STUDY PROGRAM, MATHEMATICS DEPARTMENT
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
vi
HALAMAN PERSEMBAHAN
!" !#$
Skripsi ini kupersembahkan kepada:
Tuhan Yesus dan Bunda Maria, juru selamat dan pelindungku
Almarhum Bapa yang selalu mendoakanku, Mama dan kedua saudaraku terkasih Engel dan Ewal
My beloved sister Ima Teme beserta keluarga
viii
ABSTRAK
Penentuan penyelesaian masalah pemrograman nonlinear, seperti masalah pemrograman kuadratik konveks berkendala tidak mudah dilakukan secara ana-litik. Namun, tidak berarti bahwa masalah tersebut tidak dapat diselesaikan. Sa-lah satu metode yang dapat digunakan untuk menyelesaikannya adaSa-lah Metode Himpunan Aktif. Metode himpunan aktif merupakan metode untuk menyelesai-kan masalah pemrograman kuadratik konveks yang melibatmenyelesai-kan kendala berupa persamaan dan pertidaksamaan.
Dalam metode himpunan aktif, yang diselesaikan adalah submasalah pem-rograman kuadratik konveks, yakni dengan membangun sebuah himpunan kerja yang terdiri dari kendala-kendala pertidaksamaan aktif. Kendala-kendala perti-daksamaan aktif digunakan karena memiliki nilai nol pada penyelesaiannya se-hingga dapat digantikan oleh kendala berupa persamaan, sedangkan kendala per-tidaksamaan tidak aktif dapat dihilangkan dari himpunan kerja. Selanjutnya, di-cari penyelesaian untuk arah layak. Jika arah layak sama dengan nol dan syarat Karush-Kuhn-Tucker dipenuhi maka akan diperoleh penyelesaian yang merupa-kan peminimum dari fungsi objektif pada masalah pemrograman kuadratik kon-veks. Jika tidak, maka perlu dibangun himpunan kerja yang lain dan diselesaikan submasalah baru tersebut.
Kelebihan dari metode himpunan aktif, yaitu lebih sederhana perhitun-gannya karena tidak semua kendala digunakan. Tetapi jika pemilihan titik awal tidak tepat atau dengan kata lain titik awal menyebabkan tidak ditemukannya kendala aktif maka akan dibutuhkan banyak iterasi untuk mencapai hasilnya.
ix
ABSTRACT
Determination of the solution of nonlinear programming problems, such as the convex quadratic programming problems that involve constraints is not easy done analitcally. However, it does not mean that the problem can not be completed. One of the methods that can be used to solve this problem is Active Set Methods. Active Set Method is a method to solve the problems of convex quadratic programming with involving constrains in the form of equalities and inequalities.
In the Active Set Method, the convex quadratic programming subproblems are solved by first building a working set of active ineqaulity constraints. The active inequality constraints are used because it has zero value on the solution so that it can be replaced by equality constraints, whereas inactive inequality constraints can be removed from a working set. Next, looking for a solution for the feasible direction. If the feasible direction equal to zero and the condition of Karush Kuhn Tucker is satisfied, so it will be obtained a solution that is the minimizer of objective function in the convex quadratic programming problems. If not, it is necessary to build another working set and solved the new subprobems.
The advantages of the Active Set Method that is simpler in its computation because not all constraints are used. But if the selection of starting point is not appropriate or in other words, the starting point causes not to find active constraints then it needs much iteration to achieve the results.
Keywords: active set, Karush-Kuhn-Tucker, convex, Lagrange multiplier, feasi-ble direction.
x
KATA PENGANTAR
Puji dan syukur penulis panjatkan ke hadirat Tuhan Yang Maha Esa, ka-rena atas kasih dan penyertaan-Nya sehingga skripsi berjudul “METODE HIMPUNAN AKTIF UNTUK MENYELESAIKAN MASALAH
PEMROGRAMAN KUADRATIK” dapat penulis selesaikan dengan baik. Skripsi ini disusun sebagai syarat kelulusan guna memperoleh gelar Sarjana Sains di Universitas Sanata Dharma.
Dalam penyusunan skripsi ini, tidak terlepas dari bantuan berbagai pihak. Oleh karena itu, pada kesempatan ini penulis ingin menyampaikan ucapan teri-makasih kepada:
1. Lusia Krismiyati Budiasih, S.Si., M.Si., selaku dosen pembimbing dan Ka-prodi Matematika yang telah meluangkan waktu serta penuh kesabaran membimbing dan menuntun penulis dalam penyusunan skripsi ini.
2. P.H. Prima Rosa, S.Si., M.Sc., selaku Dekan Fakultas Sains dan Teknologi, Universitas Sanata Dharma.
3. M.V. Any Herawati, S.Si., M.Si., selaku dosen penguji dan dosen pembim-bing Angkatan 2008.
4. Dr. Marcellinus Andy Rudhito, S.Pd., M.Si., selaku dosen penguji.
xi
6. Bapak dan Ibu dosen yang telah memberikan bekal ilmu baik yang berhubu-ngan deberhubu-ngan akademik maupun non akademik.
7. Staf FST khususnya Pak Tukija, Ibu Linda dan Ibu Rina, Karyawan Per-pustakaan USD serta Mas Susilo selaku Laboran .
8. Almarhum Bapak yang telah tenang di sisi Bapa, Mama dan kedua sauda-raku Engel, Ewal serta Ka ima yang selalu mendukung penulis.
9. Teman-teman seperjuangan (Nooppy, Donat, Amel, Marcell, Fenny, Ethus, Moyo dan Widi). Friendship Never Be A Part guys.
10. Ina dan Adel, anak kos Aulia, Ao, Sende, Novi, Wiwi, Elvira, Tere, Tesa dan Asri, ka Merlin, Pipot serta teman KKN kelompok 31 angkatan XLII.
11. Semua pihak yang tidak dapat disebutkan satu-persatu yang telah mendu-kung penulis dalam penyusunan skripsi ini.
Penulis menyadari bahwa tulisan ini masih sangat jauh dari sempurna. Oleh karena itu kritik dan saran dari berbagai pihak akan penulis terima dengan senang hati. Semoga skripsi ini berguna bagi semua pihak.
Yogyakarta, 29 Februari 2012 Penulis
xii
DAFTAR ISI
Halaman
HALAMAN JUDUL ... i
HALAMAN JUDUL DALAM BAHASA INGGRIS ... ii
HALAMAN PERSETUJUAN PEMBIMBING ... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN ... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vii
ABSTRAK ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xii
DAFTAR GAMBAR ... xv
xiii
BAB I PENDAHULUAN ... 1
A. Latar Belakang ... 1
B. Rumusan Masalah ... 3
C. Pembatasan Masalah ... 3
D. Tujuan penulisan ... 3
E. Manfaat Penulisan ... 4
F. Metode Penulisan ... 4
G. Sistematika Penulisan ... 4
BAB II RUANG VEKTOR DAN TEORI OPTIMASI ... 6
A. Ruang Vektor ... 6
B. Himpunan Konveks dan fungsi Konveks ... 33
C. Teori Optimasi ... 60
BAB III METODE HIMPUNAN AKTIF UNTUK MENYELESAIKAN MASALAH PEMROGRAMAN KUADRATIK ... 79
A. Pemrograman Kuadratik ... 79
B. Metode Himpunan Aktif ... 85
BAB IV PENUTUP ... 117
A. Kesimpulan ... 117
xiv
DAFTAR PUSTAKA ... 119
xv
DAFTAR GAMBAR
Gambar 2.1 Fungsi = − ... 40
Gambar 2.2 Himpunan Konveks dan yang bukan Himpunan Konveks ... 43
Gambar 2.3 Fungsi Konveks dan Bukan Fungsi Konveks ... 44
xvi
DAFTAR TABEL
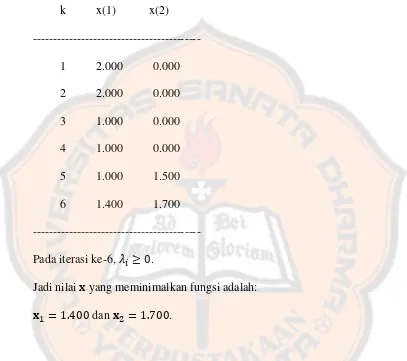
Tabel 3.1 Output Penyelesaian contoh 3.3 dengan Matlab ... 115
BAB I
PENDAHULUAN
A. LATAR BELAKANG
Optimasi merupakan pokok persoalan yang sering dijumpai dalam kehi-dupan. Optimasi menyangkut bagaimana menghadapi berbagai macam kemung-kinan untuk mencapai hasil yang optimal, contohnya pengoptimalan dalam pe-makaian lahan parkir. Dalam pengoptimalan pepe-makaian lahan parkir terdapat hal-hal yang berpengaruh, misalnya jenis kendaraan dan jumlah kendaraan. Permasalahan tersebut dapat dimodelkan secara matematis. Misalkan pengopti-malan pemakaian lahan parkir dinyatakan dengan fungsi f. Hal-hal yang mem-pengaruhi dinyatakan dengan variabel misalnya 1, 2, … , . Variabel-variabel tersebut perlu diberi batasan yang disebut sebagai kendala sedangkan fungsi
, , … , disebut fungsi objektif.
Fungsi objektif yang sering dijumpai adalah berbentuk linear. Namun dengan adanya perkembangan muncul faktor-faktor yang menyebabkan keti-daklinearan suatu fungsi sehingga memicu munculnya permasalahan nonlinear.
kendala. Namun, pada masalah-masalah lainnya fungsi objektif dapat pula dioptimalkan walaupun tidak melibatkan kendala.
Pemrograman kuadratik merupakan salah satu dari masalah pemrograman nonlinear yang melibatkan kendala. Masalah pemrograman kuadratik merupakan masalah optimasi nonlinear dengan fungsi objektif berbentuk kuadratik dan ken-dalanya berbentuk linear. Jika fungsi objektif merupakan fungsi konveks maka dikatakan masalah pemrograman kuadratik konveks. Untuk menyelesaikan ma-salah pemrograman kuadratik, khususnya pemrograman kuadratik konveks dapat digunakan beberapa metode, antara lain Metode Titik Dalam, Metode Dual dan Metode Himpunan Aktif. Dalam penulisan ini akan dipaparkan tentang Metode Himpunan Aktif.
Metode himpunan aktif adalah metode untuk menyelesaikan masalah pemrograman kuadratik dengan kendala berupa persamaan yang dapat digenera-lisasikan untuk menyelesaikan masalah pemrograman kuadratik dengan kendala yang bersifat umum. Dengan kata lain metode himpunan aktif dapat digunakan untuk menyelesaikan masalah pemrograman kuadratik yang melibatkan kendala berupa persamaan dan pertidaksamaan. Secara intuitif dalam metode himpunan aktif, kendala pertidaksamaan yang tidak aktif tidak berperan dalam pencapaian penyelesaian, sehingga dapat dihilangkan.
Karush-Kuhn-Tucker. Jika penyelesaian dari submasalah pemrograman kuadratik dengan kendala persamaan dalam himpunan kerja adalah layak untuk masalah pemrograman kuadratik semula dan syarat Karush-Kuhn-Tucker dipenuhi maka akan diperoleh penyelesaiannya. Jika syarat Karush-Kuhn-Tucker tidak dipenuhi maka himpunan kerja tersebut dihilangkan dan diselesaikan submasalah baru.
B. RUMUSAN MASALAH
Pokok-pokok permasalahan yang akan dibahas dalam tulisan ini yaitu: 1. Bagaimana menyelesaikan masalah pemrograman kuadratik dengan metode
himpunan aktif?
2. Bagaimana algoritma metode himpunan aktif dan implementasinya dalam MATLAB untuk menyelesaikan masalah pemrograman kuadratik?
C. PEMBATASAN MASALAH
Pembahasan metode himpunan aktif dalam tulisan ini hanya dibatasi pada masalah pemrograman kuadratik konveks dan pada masalah optimasi yang meli-batkan kendala.
D. TUJUAN PENULISAN
dan untuk menyusun algoritma metode himpunan aktif dengan menggunakan ba-hasa pemrograman MATLAB.
E. MANFAAT PENULISAN
Manfaat dari tulisan ini yaitu untuk memperoleh pengetahuan tentang metode himpunan aktif yang digunakan untuk menyelesaikan masalah pemrogra-man kuadratik yang melibatkan kendala serta dapat menggunakan bahasa pemro-graman MATLAB untuk menyelesaikan masalah pemropemro-graman kuadratik.
F. METODE PENULISAN
Metode yang digunakan penulis adalah metode studi pustaka yaitu de-ngan mempelajari buku-buku yang berkaitan dede-ngan metode himpunan aktif un-tuk menyelesaikan masalah pemrograman kuadratik.
G. SISTEMATIKA PENULISAN
BAB I PENDAHULUAN
G. Sistematika Penulisan
BAB II RUANG VEKTOR DAN TEORI OPTIMASI
A. Ruang Vektor
B. Himpunan Konveks dan Fungsi Konveks C. Teori Optimasi
BAB III METODE HIMPUNAN AKTIF UNTUK MENYELESAIKAN
MASALAH PEMROGRAMAN KUADRATIK
A. Pemrograman Kuadratik B. Metode Himpunan Aktif
BAB IV PENUTUP
BAB II
RUANG VEKTOR DAN TEORI OPTIMASI
Dalam Bab II ini akan dibahas tentang ruang vektor, matriks, himpunan dan
fungsi konveks serta teori optimasi. Matriks yang akan dibahas, yaitu matriks Hesse
dan matriks semidefinit positif. Untuk teori optimasi diawali dengan penjelasan
opti-masi berkendala dan optiopti-masi tidak berkendala serta penjelasan-penjelasan lain yang
berkaitan dengan teori optimasi.
A. Ruang Vektor
Definisi 2.1
Ruangℝ adalah himpunan dari semua kumpulan terurut , , ⋯ , .
Definisi 2.2
Misalkan himpunan tak kosong yang dilengkapi dengan operasi
1. Jumlah: untuk setiap , ∈ , + ∈ .
2. Perkalian skalar: untuk setiap ∈ dan skalar ∈ ℝ, ∈ .
Himpunan dengan operasi penjumlahan dan perkalian skalar dikatakan
mem-bentuk suatu ruang vektor atas ℝ jika memenuhi aksioma-aksioma berikut:
a. + = + , untuk setiap , ∈ .
c. Terdapat elemen ∈ sehingga + = , untuk setiap ∈ .
d. Untuk setiap ∈ terdapat elemen – ∈ sehingga + – = 0.
e. + = + , untuk setiap skalar ∈ ℝ dan untuk setiap , ∈ .
f. ( + = + , untuk setiap skalar , ∈ ℝ dan untuk setiap ∈ .
g. ( = , untuk setiap skalar , ∈ ℝ dan untuk setiap ∈ .
h. 1 = , untuk setiap ∈ .
Contoh 2.1
Buktikan bahwa ℝ = , , ⋯ , ∈ ℝ, ∈ ℝ, ⋯ , ∈ ℝ adalah ruang
vektor.
Bukti
Misalkan = , , ⋯ , dan = , , ⋯ , , maka
+ = + , + , ⋯ , +
= , , ⋯ ,
a. + = + , + , ⋯ , +
= + , + , ⋯ , +
= +
= , , ⋯ , + , , ⋯ , + , , ⋯ ,
= , , ⋯ , + , , ⋯ , + , , ⋯ ,
= , , ⋯ , + , , ⋯ , + , , ⋯ ,
= , , ⋯ , + + , + , ⋯ , +
= + +
c. + = , , ⋯ , + 0,0, ⋯ ,0
= + 0, + 0, ⋯ , + 0
= , , ⋯ ,
=
d. + − = , , ⋯ , + − , − , ⋯ , −
= + − , + − , ⋯ , + −
= 0,0, ⋯ ,0 =
e. + = + , + , ⋯ , +
= , , ⋯ , + , , ⋯ ,
= , , ⋯ , + , , ⋯ ,
f. + = + , , ⋯ ,
= + , + , ⋯ , +
= + , + , ⋯ , +
= , , ⋯ , + , , ⋯ ,
= , , ⋯ , + , , ⋯ ,
= +
g. = , , ⋯ ,
= , , ⋯ ,
= , , ⋯ ,
= , , ⋯ ,
=
h. 1 = 1 , , ⋯ ,
= 1 , 1 , ⋯ , 1
= , , ⋯ ,
=
Karena ℝ = , , ⋯ , ∈ ℝ, ∈ ℝ, ⋯ , ∈ ℝ dengan operasi
pen-jumlahan dan perkalian skalar memenuhi aksioma-aksioma seperti pada Definisi
Definisi 2.3
Misalkan ! = banyaknya baris pada matriks " dan # = banyaknya kolom pada
matriks " maka matriks " dikatakan bujur sangkar jika ! = #.
Definisi 2.4
Suatu matriks bujur sangkar " dikatakan simetrik jika " = "$ dengan "$ ada-lah transpose dari ".
Definisi 2.5
Misalkan " ∈ ℝ × adalah matriks simetrik.
" dikatakan definit positif jika $" > 0, ∀ ∈ ℝ , ≠ .
" dikatakan semidefinit positif jika )" ≥ 0, ∀ ∈ ℝ .
" dikatakan semidefinit negatif jika $" ≤ 0, ∀ ∈ ℝ , ≠ 0.
" dikatakan indefinit jika tidak semidefinit positif atau semidefinit negatif.
Contoh 2.2
Diberikan sebuah matriks simetrik berikut:
" = , 4 −2−2 30
Untuk mengkaji bahwa matriks " bersifat definit positif, maka:
= 1 2 3 4 − 2−2 + 3 4
= 4 − 2 − 2 + 3
= 4 − 4 + 3
= 2 − + 2 2.1
Persamaan (2.1) adalah penjumlahan kuadrat dan oleh karena itu hasilnya tidak
negatif. Persamaan (2.1) akan bernilai nol jika dan hanya jika 2 − = 0 dan
= 0, yang secara tidak langsung menyatakan pula bahwa = 0. Hal ini
membuktikan bahwa $" > 0 untuk semua ≠ 0. Jadi, dapat disimpulkan bahwa matriks " bersifat definit positif.
Contoh 2.3
Diberikan sebuah matriks simetrik berikut:
" = ,2 00 20
Untuk mengkaji bahwa matriks " bersifat semidefinit positif, maka:
$" = 1 2 ,2 0 0 20 , 0
= 1 2 322 4
= 2 + 2 2
Berdasarkan hasil di atas, dapat disimpulkan bahwa matriks " bersifat
Contoh 2.4
Diberikan sebuah matriks simetrik berikut:
" = 63 0 30 3 0
3 0 37
Untuk mengkaji bahwa matriks " bersifat semidefinit positif, maka:
$" = 1 82 63 0 30 3 0 3 0 37 6 8
7
= 1 82 63 + 0 + 30 + 3 + 0 88
3 + 0 + 3 8
7
= 3 + 0 + 3 8 + 0 + 3 + 0 8 + 8 3 + 0 + 3 8
= 3 + 3 8+ 3 + 3 8 + 3 8
= 3 + 2 8+ 8 + 3
= 3 + 8 + 3
Berdasarkan hasil di atas, dapat disimpulkan bahwa matriks " bersifat
semidefi-nit positif karena ∀ ∈ ℝ jumlahan kuadrat di atas ≥ 0.
Definisi 2.6
Diberikan titik ∈ ℝ dan 9 > 0.
Definisi 2.7
Barisan di ℝ dikatakan konvergen ke ∈ ℝ, atau dikatakan titik limit
da-ri , jika untuk setiap > > 0 ada bilangan asli ? > sehingga untuk semua
# ≥ ? > , barisan memenuhi − < >.
Definisi 2.8
Jika barisan mempunyai limit, maka barisan tersebut dikatakan konvergen. Jika
barisan tidak mempunyai limit, maka barisan tersebut dikatakan divergen.
Definisi 2.9
Misalkan @ ⊂ ℝ dan ∈ ℝ.
Titik dinamakan titik interior dari @ jika terdapat 9 > 0 sehingga :; ⊂ @.
Definisi 2.10
Himpunan @ dikatakan terbuka dalam ℝ jika setiap titik dari @ adalah titik
in-terior @.
Definisi 2.11
Himpunan @ ⊂ ℝ adalah tertutup jika dan hanya jika komplemennya adalah
Definisi 2.12
Misalkan ∈ ℝ dan misalkan B: ℝ ⟶ ℝ merupakan fungsi bernilai real yang
mempunyai turunan parsial orde ke-2 dalam himpunan terbuka E yang memuat
Bukti
Untuk membuktikan bahwa kumpulan tersebut bebas linear maka dibentuk
per-samaan berikut
H F + H F + H8F8 =
KH + 2H + 3H −3H + 5H88 = 0= 0 H + 4H + 2H8 = 0
Selanjutnya, akan digunakan operasi baris elementer untuk mencari nilai dari
H , H dan H8.
61 2 30 −3 5 1 4 27
Tambahkan -1 kali baris pertama ke baris ketiga untuk memperoleh
61 2 30 −3 5 0 2 −17
Tambahkan 2 kali baris kedua ke 3 dikali baris ketiga untuk memperoleh
61 2 30 −3 5 0 0 77
• 7H8 = 0
H8 = 0
• −3H + 5H8 = 0
−3H = 0
H = 0
H = 0
Kerana H = H = H8 = 0 maka dapat disimpulkan bahwa kumpulan vektor F , F , F8 bebas linear.
Definisi 2.14
Hasil kali dalam (inner product) ℝ adalah sebuah fungsi yang mengasosiasikan
sebuah bilangan real M , N dengan sepasang vektor dan di ℝ sedemikian
ru-pa sehingga aksioma-aksioma berikut ini terpenuhi bagi semua vektor , dan
di ℝ dan semua bilangan skalar H ∈ ℝ.
1. M , N = M , N; (Aksioma Kesimetrian)
2. M + , N = M , N + M , N; (Aksioma Penjumlahan)
3. MH , N = HM , N; (Aksioma Homogenitas)
4. M , N ≥ 0; (Aksioma Positivitas)
M , N = 0 jika dan hanya jika = 0;
Sebuah ruang vektor real yang memiliki sebuah hasil kali dalam disebut ruang
hasil kali dalam real (Real Inner Product Space).
Definisi 2.15
Hasil kali dalam baku untuk ℝ adalah hasil kali skalar
Definisi 2.16
Norma (norm) atau panjang sebuah vektor di ℝ , dinotasikan dengan < <,
dide-finisikan sebagai
< < = M , N P = ∙ P = R + + ⋯ +
Definisi 2.17
Dua vektor dan pada ℝ dikatakan ortogonal jikaM , N = 0.
Teorema 2.18 (Teorema Pythagoras)
Jika dan adalah vektor-vektor ortogonal di dalam sebuah ruang hasil kali
da-lam ℝ , maka
< + < = < < + < <
Bukti
< + < = M + , + N
= M , N + M , N + M , N + M , N = M , N + M , N + M , N + M , N
Definisi 2.19
Jika dan adalah vektor-vektor ortogonal di dalam ruang hasil kali dalam di ℝ
dan ≠ , maka proyeksi skalar dari pada diberikan oleh
=M , N< < 2.2
dan proyeksi vektor dari pada diberikan oleh
T = U< < V =1 M , NM , N 2.3
Teorema 2.20
Jika ≠ , dan Tadalah proyeksi vektor dari pada , maka
1. − TdanTadalahortogonal.
2. = Tjika dan hanya jika adalah sebuah perkalian skalar dari .
Bukti
1. Karena
MT, TN = M< < ,α < < Nα
= U< <V M , Nα
= α
M , TN = M , NM , N
=
Hal ini mengakibatkan
M − T, TN = M , TN − MT, TN
= −
= 0
2. Jika = , maka proyeksi vektor dari pada diberikan oleh
T =M , NM , N
= M , NM , N
= =
Sebaliknya, jika = T, menurut persamaan (2.3) maka
=
= < < = T □
Teorema 2.21 (Ketaksamaan Cauchy-Schwarz dalam ℝ )
Jika dan adalah vektor-vektor di dalam ruang hasil kali dalam ℝ ,maka
Bukti
Jika = , maka
M , N = 0 = < << <
Jika ≠ , maka misalkan T sebagai proyeksi vektor dari pada . Karena T
or-togonal pada − T, maka menurut Teorema Pythagoras
<T< + < − T< = < <
Jadi,
M , N
< < = <T<
= < < − < − T<
dan dari sini diperoleh
M , N = < < < < − < − T< < < ≤ < < < <
Dengan mengambil akar diperoleh
M , N ≤ < << < □
Teorema 2.22 (Ketaksamaan Cauchy-Buniakowski-Schwarz)
Misalkan , ∈ ℝ . Maka
XY Z Z Z[
Bukti
Pertidaksamaan (2.4) akan bersifat trivial jika dan hanya jika = atau = .
Oleh karena itu, misalkan dan tak nol. Misalkan \ adalah sebarang bilangan
real. Maka
Dengan mensubstitusikan nilai ], ^ dan `, maka diperoleh
aY Z Z
Z[
b ≤ < < < <
Selanjutnya dengan mengambil akar diperoleh
XY Z Z Z[
Definisi 2.23
Pemetaan <∙< disebut norm jika dan hanya jika memenuhi sifat-sifat berikut:
1. < < ≥ 0, ∀ ∈ ℝ .
2. < < = 0 jika dan hanya jika = 0.
3. <] < = < <, ∀ ∈ ℝ, ∈ ℝ .
4. < + < ≤ < < + < <, ∀ , ∈ ℝ .
Contoh 2.6
Akan dibuktikan bahwa < < = _Z[ Z adalah norm.
Bukti
Untuk membuktikan bahwa < < = _Z[ Z adalah norm, maka harus
ditunjuk-kan bahwa < < = _Z[ Z memenuhi masing-masing sifat dari Definisi 2.23. Misalkan dan adalah sebarang vektor di ℝ , # dan adalah sebarang
bila-ngan real, maka
1. Akan ditunjukkan bahwa < < ≥ 0.
Untuk Z ≥ 0, maka
< < = Y Z ≥ 0 Z[
Oleh karena itu, _Z[ Z = 0 dan < < = 0. Sebaliknya, jika < < = 0 maka _Z[ Z = 0.
Karena Z ≥ 0, dengan demikian _Z[ Z = 0 hanya dipenuhi jika Z = 0 sehingga = 0.
3. Akan ditunjukkan bahwa <] < = < < , ∀ ∈ ℝ, ∈ ℝ .
< < = Y Z Z[
= aY Z
Z[ b
= < <
4. Akan ditunjukkan bahwa < + < ≤ < < + < < , ∀ , ∈ ℝ .
< + < = Y Z + Z Z[
≤ Y Z
Z[
+ Y Z
Z[
= < < + < < (Ketaksamaan Cauchy-Schwarz)
Jadi,
< + < ≤ < < + < <
Contoh 2.7
Bukti
Untuk membuktikan bahwa < < = _Z[ Z d adalah norm, maka harus
di-tunjukkan bahwa < < = _Z[ Z d memenuhi masing-masing sifat dari De-finisi 2.23.
Misalkan dan adalah sebarang vektor di ℝ , # dan adalah sebarang
bila-ngan real, maka
1. Akan ditunjukkan bahwa < < ≥ 0.
Karena Z ≥ 0 untuk sebarang bilangan real Z, maka
< < = aY Z Z[
b d
≥ 0
2. Akan ditunjukkan bahwa < < = _Z[ Z d = 0 jika dan hanya jika = 0.
Jika = 0 maka Z = 0, ∀c.
Oleh karena itu, _Z[ Z = 0 dan < < = 0.
Sebaliknya, jika < < = 0 maka _Z[ Z = 0.
Karena Z ≥ 0, dengan demikian _Z[ Z P = 0 hanya dipenuhi jika
Z = 0 sehingga = 0.
3. Akan ditunjukkan bahwa <] < = < < , ∀ ∈ ℝ, ∈ ℝ .
< < = aY Z Z[
= a Y Z
Dengan mengambil akar maka diperoleh
1. < − < ≥ 0.
2. < − < = 0 jika dan hanya jika = .
3. < − < ≤ < − < + < − <.
4. < − < = < − <.
Bukti
1. Akan dibuktikan bahwa < − < ≥ 0.
< − < = aY Z− Z Z[
b P
Karena Z − Z ≥ 0 untuk sebarang bilangan real Z dan Z maka
dipero-leh < − < ≥ 0.
2. Akan dibuktikan bahwa < − < = 0 jika dan hanya jika = .
Jika = maka Z = Z, ∀c.
Oleh karena itu _Z[ Z− Z = 0 dan < − < = 0. Sebaliknya, jika < − < = 0, maka _Z[ Z − Z = 0.
Karena Z − Z ≥ 0, dengan demikian _Z[ Z− Z = 0 hanya dipenuhi
jika Z − Z = 0, ∀c sehingga = .
3. Akan dibuktikan bahwa < − < ≤ < − < + < − <.
< − < = < − + − <
= M − + − , − + − N
= < − < + M − , − N + M − , − N + < − <
= < − < + 2M − , − N + < − < ≤ < − < + 2< − << − < + < − <
= < − < + < − <
Dengan mengambil akar maka diperoleh
< − < ≤ < − < + < − <.
4. Akan dibuktikan bahwa < − < = < − <.
< − < = < −1 − < = 1 < − < = < − <
Jadi, terbukti bahwa < − < = < − <.
Teorema 2.25 (Hukum Paralelogram)
Untuk semua , ∈ ℝ ,
< + < + < − < = 2 < < + < <
Bukti:
< + < + < − < = M + , + N + M − , − N
= M , + N + M , + N + M , − N − M , − N
= M , N + M , N + M , N + M , N = 2M , N + 2M , N
= 2< < + 2< <
= 2 < < + < <
Definisi 2.26
Barisan I ⊂ ℝ disebut barisan Cauchy jika lim
h,i⟶j< h− i< = 0
Dengan kata lain untuk setiap k > 0, terdapat sebuah bilangan bulat : sehingga
< h− i< < k untuk semua !, l > :.
Definisi 2.27
Misalkan m adalah sebuah relasi pada himpunan n, maka m disebut relasi urutan
parsial jika memenuhi tiga sifat berikut:
1. Refleksif
m adalah fefleksif jika dan hanya jika ] m ] untuk setiap ] ∈ n.
2. Antisimetris
m adalah antisimetris jika dan hanya jika ] m ^ dan ^ m ], maka ] = ^ untuk
setiap ], ^ ∈ n.
m adalah transitif jika dan hanya jika ] m ^ dan ^ m `, maka ] m ` untuk
se-tiap ], ^, ` ∈ n.
Relasi urutan parsial biasanya dinotasikan dengan ≤; dan ] ≤ ^ dibaca “]
men-dahului ^”. Relasi ≥, yaitu ] melampaui ^, juga sebuah urutan parsial dari n,
disebut urutan dual.
Definisi 2.28
Himpunan n bersama-sama dengan suatu relasi urutan parsial m pada n disebut
himpunan terurut parsial (partially ordered set).
Contoh 2.8
Perhatikan bilangan bulat positif ℕ. Dikatakan ] membagi ^ ditulis ]|^, jika
ter-dapat ` ∈ ℕ sedemikian sehingga ]` = ^. Contoh 2|4, 3|12, 7|21 dan
seterus-nya. Tunjukkan bahwa pembagian adalah sebuah pengurutan parsial dari ℕ, yaitu,
tunjukkan bahwa
a. ]|].
b. Jika ]|^ dan ^|] maka ] = ^.
c. Jika ]|] dan ^|` maka ]|`.
Penyelesaian
b. Anggap ]|^ dan ^|], misal ^ = p] dan ] = H^. Maka ^ = pH^ sehingga
pH = 1. Karena p dan H adalah bilangan bulat positif maka p = 1 dan H = 1.
Dengan demikian ] = ^. (Antisimetris).
c. Anggap ]|^ dan ^|`, misal ^ = p] dan ` = H^. Maka ` = Hp] sehingga ]|`.
(Transitif).
Definisi 2.29
Misalkan q adalah subhimpunan dari sebuah himpunan n yang terurut secara
par-sial. Definisikan:
a. Batas atas dan supremum dari q.
Elemen r dalam n disebut batas atas dari q jika r melampaui (≥) setiap
elemen dari q, yaitu r adalah batas atas dari q jika ∀ ∈ q, ≤ r. Jika
su-atu batas atas dari q mendahului (≤) setiap batas atas lain dari q maka disebut
batas atas terkecil atau supremum dari q dan dinyatakan dengan:
sup(q)
b. Batas bawah dan infimum dari q.
Elemen ! dalam n disebut batas bawah dari q jika ! mendahului (≤) setiap
elemen dari q, yaitu ! adalah batas bawah dari q jika ∀ ∈ q, ! ≤ . Jika
suatu batas atas dari q melampaui (≥) setiap batas bawah lain dari q maka
disebut batas bawah terbesar atau infimum dari q dan dinyatakan dengan:
Definisi 2.30
Misalkan n merupakan subhimpunan tak kosong dari ℝ.
a. Himpunan n dikatakan terbatas ke atas jika ada bilangan x ∈ ℝ sedemikian
sehingga H ≤ x untuk semua H ∈ n. Setiap bilangan x dikatakan batas atas
dari n.
b. Himpunan n dikatakan terbatas ke bawah jika ada bilangan y ∈ ℝ
sedemi-kian sehingga y ≤ H untuk semua H ∈ n. Setiap bilangan y dikatakan batas
bawah dari n.
Lemma 2.31
Batas bawah l dari himpunan tak kosong n di ℝ adalah infimum dari n jika dan
hanya jika ∀> > 0 terdapat ∈ n sedemikian sehingga l + > > .
Bukti
(⟹)
Diketahui l = inf n dan > > 0.
Akan ditunjukkan terdapat ∈ n sedemikian sehingga l + > > .
Jika ^ batas bawah n maka ^ ≤ l.
Karena l + > > l maka l + > bukan batas bawah n.
(⟸)
Jika l suatu batas bawah n, dan ∀> > 0 terdapat ∈ n sedemikian sehingga
l + > > .
Akan dibuktikan l = inf n.
Misalkan bahwa ^ suatu batas bawah n. Karena ∈ n dan ^ suatu batas bawah n
maka ≥ ^.
Karena l + > > maka l + > > ^.
Jadi ∀> > 0 berlaku l + > > ^. Andaikan ^ > l maka jika diambil > =|}i akan
diperoleh l + > =i~| sehingga ^ > l + > > l dan ^ > l + > > yang
kontra-diksi dengan pernyataan bahwa ^ batas bawah. Jadi, jika ^ batas bawah n
harus-lah l ≥ ^ sehingga l merupakan batas bawah terbesar atau l = inf n.
Definisi 2.32
Misalkan • = merupakan barisan bilangan real. Barisan • dikatakan naik
jika memenuhi pertidaksamaan
≤ ≤ ⋯ ≤ ≤ ~ ≤ ⋯
dan dikatakan turun jika memenuhi pertidaksamaan
≥ ≥ ⋯ ≥ ≥ ~ ≥ ⋯
Jika barisan • merupakan barisan naik atau barisan turun maka merupakan
Teorema 2.33
Barisan turun dan terbatas ke bawah adalah konvergen.
Bukti:
Diberikan turun dan terbatas ke bawah. Karena : # ∈ ℕ ≠ ∅ maka
ter-dapat ^ ∈ ℝdan ^ = inf : # ∈ ℕ . Jadi, untuk setiap # ∈ ℕ berlaku
≥ ^ (2.5)
Karena ^ = inf : # ∈ ℕ , maka untuk > > 0 yang diberikan terdapat : ∈ ℕ
dan
^ − > > •≥ ^ (2.6)
Karena turun, maka mengingat (2.5) dan (2.6), untuk setiap # ≥ : berlaku
^ − > > • ≥ ≥ ^ > ^ + > (2.7)
Jadi, diperoleh pernyataan bahwa untuk setiap > > 0 terdapat : ∈ ℕ sedemikian
sehingga untuk setiap # ≥ ℕ dan # ≥ :, maka − ^ < >. Jadi,
konver-gen dan lim = ^ = inf : # ∈ ℕ .
B. Himpunan Konveks dan Fungsi Konveks
Definisi 2.34
Sebuah Fungsi B: ℝ → ℝ dikatakan kontinu pada … ∈ ℝ jika untuk setiap
k > 0 yang diberikan, terdapat 9 > 0 sedemikian sehingga jika < − …< < 9
Definisi 2.35
Misalkan ‡ adalah konstanta, B dan ˆ adalah fungsi-fungsi yang memiliki limit
di `. Maka
1. Misalkan didefinisikan B = ‡ maka harus dibuktikan f x k
c
x→ ( )=
lim .
Misalkan > > 0, harus ditunjukkan bahwa dapat dicari 9 > 0 sedemikian
se-hingga
Ambil sebarang 9 > 0 maka untuk 0 < − ` < 9 berlaku
B − ‡ = ‡ − ‡ = 0 < >
Jadi terbukti bahwa k k
3. Misalkan > > 0, f x K
4. Untuk membuktikan rumus 4, akan digunakan informasi dari rumus-rumus
Teorema 2.37
Menurut teorema tentang limit fungsi diperoleh:
[
]
3. B(`) adalah nilai ekstrimB pada n jika merupakan nilai maksimum atau
Teorema 2.39 (Teorema Titik Kritis)
Andaikan B terdefinisikan pada selang Š yang memuat titik `. Jika B(`) adalah
nilai ekstrim, maka ` haruslah berupa suatu titik kritis; yakni ` berupa salah satu:
1. Titik ujung dari Š; atau
2. Titik stasioner dari B yakni titik ` sedemikian sehingga B′(`) = 0; atau
3. Titik singular dari B yakni titik ` sedemikian sehingga B′(`) tidak ada;
Bukti:
Misalkan B(`) berupa nilai maksimum B pada Š dan misalkan bahwa ` bukan
ti-tik ujung atau pun titi-tik singular. Harus diperlihatkan bahwa ` adalah titik
sta-sioner.
Karena B(`) adalah nilai maksimum, maka B( ) ≤ B(`) untuk semua dalam Š,
yaitu
B( ) − B(`) ≤ 0
Jadi, jika < `, sehingga − ` < 0, maka
B( ) − B(`)− ` ≥ 0 (2.8)
sedangkan jika > `, maka
B( ) − B(`)− ` ≤ 0 (2.9)
Karena ` bukan titik singular maka B′(`) ada. Akibatnya, untuk → `} maka
lim Ž→••
B( ) − B(`)
dan untuk → `~ maka
lim Ž→•’
B( ) − B(`)
− ` = B‘(`) ≤ 0
Jadi, dapat disimpulkan bahwa B‘(`) = 0 atau ` merupakan titik stasioner.
Teorema 2.40 (Teorema Nilai Rata-rata)
Jika B kontinu pada selang tertutup [], ^] dan terdiferensial dalam interval (], ^)
maka terdapat paling sedikit satu bilangan ` dalam (], ^) dimana
B‘(`) = B(^) − B(]) ^ − ]
atau ekuivalen dengan
B(^) − B(]) = B‘(`)(^ − ])
Bukti:
Pembuktian Teorema Nilai Rata-rata ini didasarkan pada analisis dari fungsi
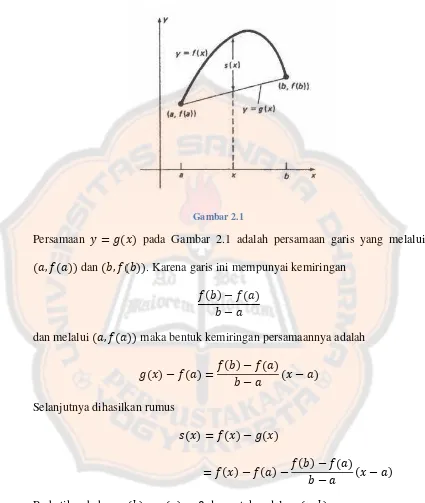
Persamaan = ˆ(
(], B(])) dan (^, B(
dan melalui (], B(]
Selanjutnya dihasilk
Perhatikan bahwa H
Gambar 2.1
) pada Gambar 2.1 adalah persamaan garis ( (^)). Karena garis ini mempunyai kemiringan
B(^) − B(]) ^ − ]
])) maka bentuk kemiringan persamaannya adala
ˆ( ) − B(]) = B(^) − B(])^ − ] ( − ])
ilkan rumus
H( ) = B( ) − ˆ( )
= B( ) − B(]) −B(^) − B(])^ − ] (
H(^) = H(]) = 0 dan untuk dalam (], ^)
H‘( ) = B‘( ) −B(^) − B(]) ^ − ]
is yang melalui
alah
Jika diketahui bahwa terdapat suatu bilangan ` dalam (], ^) yang memenuhi
H‘(`) = 0 maka bukti selesai. Hal ini didasarkan pada persamaan terakhir bahwa
0 = B‘(`) −B(^) − B(]) ^ − ]
Karena B dan ˆ kontinu maka B − ˆ kontinu di [], ^]. Oleh karena itu H‘(`) ada
untuk suatu ` dalam (], ^)
Berdasarkan sifat bahwa jika B kontinu pada interval tertutup [], ^], maka B
mencapai nilai maksimum dan minimum. Jadi H harus mencapai nilai maksimum
ataupun nilai minimum pada [], ^]. Jika kedua nilai ini kebetulan nol, maka H( )
secara identik adalah nol pada [], ^], akibatnya H‘( ) = 0 untuk semua dalam
(], ^). Jika salah satu nilai maksimum atau nilai minimum berlainan dengan nol,
maka nilai tersebut dicapai pada sebuah titik dalam `, karena H(]) = H(^) = 0.
Karena H mempunyai turunan di setiap titik dari (], ^), sehingga dengan
Teo-rema Titik Kritis H‘(`) = 0.
Definisi 2.41
Sebuah fungsi B: ℝ → ℝ dikatakan terdiferensial secara kontinu pada ∈ ℝ ,
jika “”
“Ž•( ) ada dan kontinu, c = 1 … #. Gradien dari B pada didefinisikan
seba-gai
Jika B terdiferensial secara kontinu pada setiap titik dari sebuah himpunan terbuka
@ ⊂ ℝ , maka B dikatakan terdiferensial secara kontinu pada @ dan dinotasikan
dengan B ∈ ˜ (@).
Definisi 2.42
Sebuah fungsi B: ℝ → ℝ yang terdiferensial secara kontinu dikatakan
terdife-rensial dua kali secara kontinu pada ∈ ℝ , jika “™”
“Ž•“Žš( ) ada dan kontinu,
c = 1 … #. Matriks Hesse dari B pada didefinisikan sebagai matriks simetri # × # yang elemennya
[∇ B( )]Z› =—— B
Z— ›( ), 1 ≤ c, œ ≤ #
Jika B terdiferensial dua kali secara kontinu pada setiap titik dari sebuah
himpu-nan terbuka @ ⊂ ℝ , maka B dikatakan terdiferensial dua kali secara kontinu
pa-da @ dan dinotasikan dengan B ∈ ˜( )(@).
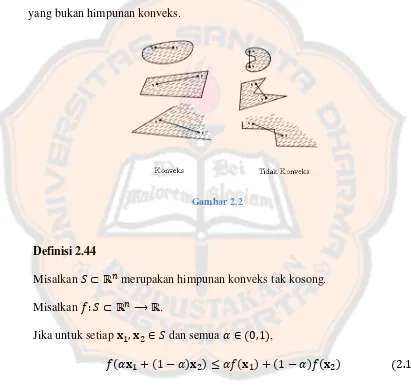
Definisi 2.43
Himpunan n ∈ ℝ adalah konveks jika untuk setiap , ∈ n, segmen garis
yang menghubungkan dan juga terletak di n.
Segmen garis yang menghubungkan dan didefinisikan dengan:
Jadi, subhimpunan n dari ℝ adalah konveks jika dan hanya jika untuk setiap
dan di n dan setiap dengan 0 ≤ ≤ 1, vektor + (1 − ) juga di n.
Berikut diberikan beberapa gambar yang mendeskripsikan himpunan konveks dan
yang bukan himpunan konveks.
Gambar 2.2
Definisi 2.44
Misalkan n ⊂ ℝ merupakan himpunan konveks tak kosong.
Misalkan B: n ⊂ ℝ ⟶ ℝ.
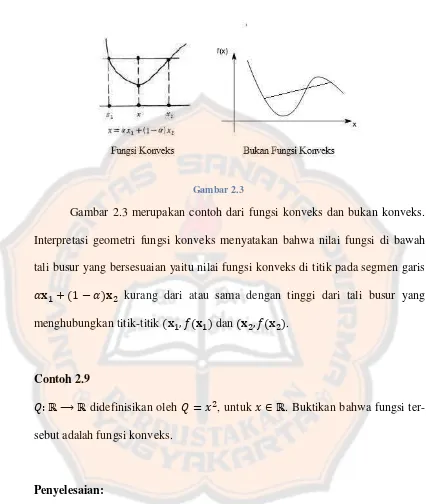
Jika untuk setiap , ∈ n dan semua ∈ (0,1),
B( + (1 − ) ) ≤ B( ) + (1 − )B( ) (2.11)
Gambar 2.3
Gambar 2.3 merupakan contoh dari fungsi konveks dan bukan konveks.
Interpretasi geometri fungsi konveks menyatakan bahwa nilai fungsi di bawah
tali busur yang bersesuaian yaitu nilai fungsi konveks di titik pada segmen garis
+ (1 − ) kurang dari atau sama dengan tinggi dari tali busur yang
menghubungkan titik-titik ( , B( ) dan ( , B( ).
Contoh 2.9
•: ℝ ⟶ ℝ didefinisikan oleh • = , untuk ∈ ℝ. Buktikan bahwa fungsi
ter-sebut adalah fungsi konveks.
Penyelesaian:
Melalui Definisi 2.44 akan dibuktikan bahwa
•( + (1 − ) ) ≤ •( ) + (1 − )•( )
Ambil , ∈ ℝ dan semua ∈ [0,1] maka •( ) = dan •( ) = .
= + 2 (1 − ) + (1 − )
= + 2( − ) + (1 − 2 + )
= + 2( − ) + ( − 2 + )
Karena ∈ [0,1] maka < , sehingga
•( + (1 − ) ) < + 2( − ) + ( − 2 + )
= + 2(0) + ( − )
= + ( − )
= + (1 − )
= •( ) + (1 − )•( )
Karena •( + (1 − ) ) ≤ •( ) + (1 − )•( ), maka dapat disimpulkan
bahwa • = adalah fungsi konveks untuk sebarang ∈ [0,1].
Contoh 2.10
Diberikan
• = + − 2 − 5 +294
untuk ∈ ℝ . Akan ditunjukkan bahwa • adalah fungsi konveks.
Penyelesaian:
• adalah fungsi konveks bila memenuhi
•( + (1 − ) ) ≤ •( ) + (1 − )•( )
+ (1 − ) = ž Ÿ + (1 − ) ž Ÿ
= ž Ÿ + ž −− Ÿ
= U (( − )+
} )+ V
sehingga,
•( + (1 − ) )
= ( ( − )+ ) + ( ( } )+ ) − 2( ( − )+ )
−5( ( − )+ ) +294
= ( − )2+ 2 ( − ) +
1 2
+ ( − )2+ 2 ( − ) +
2 2
−2( − + ) − 5( − + ) +294
= 12− 2 + 12 +2 − 2 21+ 12 + ( 22− 2 + 22
+2 2− 2 22+ 22) − 2 + 2 − 2 − 5 + 5 −5 +294
= 12− 2 + 12+2 − 2 21+ 12 + ( 22− 2 + 22
+2 2− 2 22+ 22) − 2 + 2 − 2 − 5 + 5 −5 +294
= ( 2 + 2 − 2 2
1 1− 2 2 2 2+ 2 + 2 +2 1 1+2 2
−2 − 2 − 2 1+ 2 1− 5 2+ 5 2) + + − 2 1−5 2+294
•( + (1 − ) )
< ( 12+ 22− 2 − 2 + 12+ 22+2 +2 2− 2 12
−2 − 2 1+ 2 1− 5 2+ 5 2) + + − 2 1−5 2+ 294
= 12+ 22+ 12+ 22− 2 12− 2 22− 2 + 2 − 5 + 5 + 12
+ − 2 1−5 2+ 294
= + − − − 2 1+ 2 1− 5 2+ 5 2+ + − 2 1−5 2
+294
= + − 2 1− 5 2+ + − 2 1−5 2
− + − 2 1− 5 2 +294
= ( + − 2 1− 5 2) + + − 2 1−5 2 − + − 2 1− 5 2
+294
= ( + − 2 − 5 ) + (1 − )( + − 2 − 5 ) + ¡
= •( ) + (1 − )•( )
Karena
•( + (1 − ) ) ≤ •( ) + (1 − )•( )
maka dapat disimpulkan bahwa • = 12+ 22− 2 1− 5 2+294 adalah fungsi
Definisi 2.45 (Turunan Berarah)
Misalkan B: ℝ ⟶ ℝ terdiferensial secara kontinu pada himpunan terbuka
@ ⊂ ℝ . Maka untuk ∈ @ dan ¢ ∈ ℝ , turunan berarah dari B pada dalam
arah ¢ didefinisikan sebagai
B‘( ; ¢) ≝ lim ¤⟶¥
B( + ¦¢) − B( )
¦ = ∇B( )§¢ (2.12)
dimana ∇B( ) adalah gradien dari B pada , merupakan vektor # × 1.
Untuk semua , ∈ @, diperoleh
B( ) = B( ) + ∇B + ¨( − ) $( − ), ¨ ∈ (0,1)
atau
B( ) = B( ) + ∇B( )$( − ) + ©(< − <).
Definisi 2.46
Misalkan B ∈ ˜( )@. Untuk sebarang ∈ @, ¢ ∈ ℝ , turunan berarah kedua
dari B pada dalam arah d didefinisikan dengan
B‘‘( ; ¢) ≝ lim ¤⟶¥
B′( + ¦¢; ¢) − B′( ; ¢)
¦ = ¢$∇ B( )¢ (2.13)
dimana ∇ B( ) merupakan matriks Hesse dari B pada . Untuk sebarang
, + ¢ ∈ @, ada ª ∈ ( , + ¢) sedemikian sehingga
B( + ¢) = B( ) + ∇B( )$¢ +1
2 ¢$∇ B(ª)¢
B( + ¢) = B( ) + ∇B( )$¢ +1
2 ¢$∇ B( )¢ + ©(<¢<«)
Teorema 2.47
Misalkan n ⊂ ℝ adalah himpunan konveks terbuka tak kosong dan misalkan
B: n ⊂ ℝ → ℝ adalah fungsi yang terdiferensial. Maka B adalah konveks jika
dan hanya jika
B( ) ≥ B( ) + ∇B( )$( − ), ∀ , ∈ n (2.14)
Bukti:
Syarat Perlu: Misalkan B( ) adalah fungsi konveks, maka untuk semua dengan
0 < < 1 dan , ∈ ℝ .
B( + (1 − ) ) ≤ B( ) + (1 − )B( ) ⟺ B( + − ) ≤ B( ) + B( ) − B( )
⟺ B + ( − ) ≤ B( ) − B( ) + B( )
⟺ B + ( − ) − B( ) ≤ B( ) − B( )
Oleh karena itu,
B + ( − ) − B( )≤ B( ) − B( )
Tetapkan → 0 maka diperoleh
∇B( )$( − ) ≤ B( ) − B( )
B( ) ≥ B( ) + ∇B( )$( − )
Syarat Cukup: Asumsikan bahwa (2.14) berlaku. Ambil sebarang , ∈ n dan
tetapkan = + (1 − ) , 0 < < 1. Maka
B( ) ≥ B( ) + ∇B( )$( − ) B( ) ≥ B( ) + ∇B( )$( − )
Oleh karena itu,
B( ) + (1 − )B( )
≥ žB( ) + ∇B( )$( − )Ÿ + (1 − )žB( ) + ∇B( )$( − )Ÿ
= B( ) + ∇B( )$( − ) + (1 − )B( ) + (1 − )∇B( )$( − )
= B( ) + ∇B( )$( − ) + B( ) − αB( ) + ∇B( )$( − )
− ∇B( )$( − )
= B( ) + ∇B( )$( − + − − + )
= B( ) + ∇B( )$( + (1 − α) − ) = B( ) + ∇B( )$( − )
= B( ) + 0
= B( + (1 − ) )
Teorema 2.48
Misalkan n ⊂ ℝ adalah himpunan konveks terbuka tak kosong, dan misalkan
B: n ⊂ ℝ ⟶ ℝ terdiferensial dua kali secara kontinu. Maka B adalah konveks
jika dan hanya jika matriks Hesse adalah semidefinit positif pada setiap titik
da-lam n.
Bukti:
Syarat cukup: Misalkan bahwa matriks Hesse ∇ B( ) adalah semidefinit positif
pada setiap titik ∈ n.
Akan dibuktikan bahwa B adalah konveks.
Pertimbangkan , … ∈ n. Melalui Teorema Nilai Rata-rata diperoleh,
B( ) = B(…) + ∇B(…)$( − …) +1
2 ( − …)$∇ B(-)( − …)
dimana - = … + ¦( − …), ¦ ∈ (0,1). Perhatikan bahwa - ∈ n.
Karena ∇ B( ) adalah semidefinit positif ∀ ∈ n maka
( − …)$∇ B(-)( − …) ≥ 0
Akibatnya,
B( ) ≥ B(…) + ∇B(…)$( − …)
Oleh karena itu melalui Teorema 2.47, B adalah fungsi konveks.
Syarat perlu: Misalkan bahwa B adalah fungsi konveks dan misalkan … ∈ n.
Karena n adalah himpunan terbuka, maka ada 9 > 0 sedemikian sehingga ketika
\ < 9, … + \T ∈ n. Melalui Teorema 2.47
B … + \T ≥ B … + \∇B … $T (2.15)
Karena B … terdiferensial dua kali pada …, maka
B … + \T = B … + \∇B … $T +\
2 T$∇ B … T + © <\T<« 2.16
Dengan mensubstitusikan persamaan (2.16) ke pertidaksamaan (2.15) maka
B … + \∇B … $T +\
2 T$∇ B … T + © <\T<« ≥ B … + \∇B … $T
B … − B … + \∇B … $T − \∇B … $T +\
2 T$∇ B … T + © <\T<« ≥ 0
0 +12 \ T$∇ B … T + © <\T<« ≥ 0
Jadi, setelah disubstitusikan diperoleh
1
2 \ T$∇ B … T + © <\T<« ≥ 0
Bagi dengan \ dan tetapkan \ → 0, maka
T$∇ B … T ≥ 0
Jadi, dapat disimpulkan bahwa Matriks Hesse adalah semidefinit positif.
Teorema 2.49 (Teorema Proyeksi)
Misalkan n ⊂ ℝ merupakan himpunan konveks tertutup tak kosong dan ∉ n,
< −°<= inf∈ n< − < (2.17)
Selanjutnya, °adalah titik minimal dari persamaan (2.17) jika dan hanya jika
M −°, −°N≤ 0, ∀ ∈ n (2.18)
atau dapat dikatakan bahwa ° adalah proyeksi ±H( ) dari pada n jika dan
hanya jika (2.18) berlaku.
Bukti
Misalkan
inf < − < ∈ n = ² > 0 (2.19)
Karena ² adalah batas bawah terbesar maka ² ≤ < − <, ∀ ∈ n.
Misalkan terdapat sebuah titik 1∈ n dan ∉ n. Kemudian, dibuat ruas garis yang menghubungkan titik 1 dan titik y. Selanjutnya, dari titik 1 dibuat kitar dengan radius 1. Dari titik limit yang diperoleh dari kitar 1 dan berada pada ga-ris yang menghubungkan titik 1 dan titik y, diperoleh titik 2. Kemudian, dari
ti-tik 2 dibuat kitar dengan radius 12. Dari titik limit yang diperoleh dari kitar 2
dan berada pada garis yang menghubungkan titik 2 dan titik y, diperoleh titik
3. Demikian seterusnya, hingga diperoleh titik ‡−1. Kemudian dari titik ‡−1
dibuat kitar dengan radius 1
Akan ditunjukkan bahwa < − ‡<→ ².
Karena ² = inf < − < ∈ n maka berdasarkan Lemma 2.31, untuk setiap
> =I> 0 terdapat < − ‡< dengan ‡∈ n sedemikian sehingga ² + I> < − I<.
Dengan demikian, terbentuk barisan < − ‡< yang terbatas dan turun. Berdasarkan Teorema 2.33, maka < − ‡< akan konvergen dan
lim
‡→ < − ‡<= ² = inf < − ‡< .
• Berikut ini akan dibuktikan ‡ adalah barisan Cauchy dan oleh karena itu
ada limit °∈ n.
Melalui Teorema Parallelogram diketahui bahwa
< + <2+< − <2= 2 < <2+< <2
Misalkan ambil ‡, h∈ n di mana diganti dengan ‡− dan diganti
de-ngan !− . Dengan mensubstitusikan dan ke Hukum Parallelogram di
atas maka diperoleh
< ‡+ !− 2 <2+< ‡− !<2= 2< ‡− <2+ 2< !− <2
< ‡− !<2 = 2< ‡− <2+ 2< !− <2−< ‡+ !− 2 <2
= 2< I− < + 2< h− < − ³2 U I+2 h− V³
= 2< I− < + 2< h− < − 4 ´ µ~ ¶− ´ (2.20)
Dari definisi ² diketahui bahwa inf < − < = ² sehingga < − <=
< − <≥ ², ∀ ∈ n. Dengan mengganti = µ~ ¶, diperoleh
³ ‡+2 !− ³≥
³ ‡+2 !− ³2≥ ²2 (2.21)
Jadi, dengan menggunakan persamaan (2.20) dan (2.21) diperoleh
< ‡− !<2≤ 2< ‡− <2+ 2< !− <2− 4²2
Ambil k dan m cukup besar sehingga < ‡− <→ ² dan < !− <→ ².
De-ngan demikian dipenuhi < ‡− !<2→ 2²2+ 2²2− 4²2 = 0 atau
< ‡− !<⟶ 0
yang menunjukkan bahwa · adalah barisan Cauchy dengan limit °. Karena
n tertutup maka °∈ n. Hal ini menunjukkan bahwa ada ° sehingga
< −°<= ².
Jadi, barisan ‡ adalah barisan Cauchy.
• Akan dibuktikan bahwa ° adalah tunggal.
Andaikan ° tidak tunggal, artinya ada ° ∈ n dan ° ≠° dengan <° − <=
².
Melalui Hukum Parallelogram, misalkan diganti dengan ° − dan
di-ganti dengan °− , maka diperoleh
<° −°<2= 2<° − <2+ 2<°− <2−<° +° − 2 <2
= 2<… − < + 2<… − < − ³2 U… + …2 − V³
= 2<… − < + 2<… − < − 4 ³… + …2 − ³
= 2² + 2² − 4 ³… + …2 − ³
Karena …+…
2 ∈ n, maka menurut (2.21), ²2≤´ …+…
2 − ´
2 .
Akibatnya,
<° −°<2≤ 2²2+ 2²2− 4²2 = 0
Jadi, <° −°<≤ 0, padahal <° −°<> 0. Jadi, ada kontradiksi. Terbukti
° =°.
• Akan dibuktikan bahwa jika M −°, −°N≤ 0, ∀ ∈ n, maka ° adalah titik
minimum dari < −°<= inf ∈n< − <.
Ambil x sebarang di S dan misalkan M −°, −°N≤ 0, ∀ ∈ n dipenuhi,
se-hingga < − <2 =< −°+°− <2
= < − …< + <… − < + 2M − …, … − N = < − …< + <… − < + 2(… − )§( − …)
Karena <°− <2≥ 0 dan (°− )¸( −°) ≥ 0, maka
< −°<= inf ∈n< − <.
• Akan dibuktikan bahwa jika ° adalah titik minimum dari
< −°<= inf ∈n< − <, maka M −°, −°N≤ 0, ∀ ∈ n.
Misalkan < − <2≥< −°<2, ∀ ∈ n.
Karena °+ \( −°) ∈ n dengan \ ∈ (0,1), maka diperoleh
< − (°+ \( −°))<2≥< −°<2 ⇔< −°− \( −°)<2≥< −°<2 ⇔< −°− \ + \°<2≥< −°<2 ⇔< −°+ \(°− )<2≥< −°<2
⇔< −°<2+ \2<°− <2+ 2\(°− )¸( −°)≥< −°<2
⇔< −°<2+ \2< −°<2+ 2\( −°)¸(°− )≥< −°<2
⇔ \2< −°<2+ 2\( −°)¸(°− )≥ 0
Bagi dengan \ dan misalkan \ → 0, maka diperoleh
M −°, −°N≤ 0, ∀ ∈ n.
Teorema 2.50
Misalkan n ⊂ ℝ merupakan himpunan konveks tertutup tak kosong dan ∉ n.
Maka terdapat vektor tak nol T dan bilangan real sehingga
T$ > dan T$ ≤ α, ∀ ∈ n (2.22)
T$ > sup T$ , ∀ ∈ n (2.23)
yang mengatakan bahwa terdapat hiperbidang º = T$ = α yang secara te-gas membagi dan n.
Bukti:
Karena n adalah himpunan konveks tertutup tidak kosong dan ∉ n, maka
mela-lui Teorema Proyeksi terdapat titik tunggal … ∈ n sehingga
− … $ − … ≤ 0, ∀ ∈ n
Karena
− … $ − … ≤ 0
maka
ž − … $ − … Ÿ$ = − … $ − …
≤ 0
Diberikan T = − … ≠ 0, maka
0 ≥ − … $ − … = − … $ − … + −
= T$ − … + T$ −
= T$T + T$ − T$
= <T<<T< + T$ − T$
= T$ − T$ + <T<
Karena itu
Tetapkan = sup T$ ∈ n sehingga
T$ ≥ T$ + <T< = α + <T<
Jadi benar bahwa terdapat vektor tak nol T dan bilangan real sehingga
T$ ≥ α + <T<
Lemma 2.51 (Lemma Farkas’)
Misalkan q ∈ ℝ»×¼ dan½ ∈ ℝ . Maka tepat satu dari sistem berikut mempunyai
penyelesaian:
Sistem 1 q ≤ 0, ½$ > 0 (2.24) Sistem 2 q$ = ½, ≥ 0 (2.25)
Bukti:
Misalkan bahwa terdapat penyelesaian untuk Sistem 2 yaitu terdapat ≥ 0
sede-mikian sehingga q$ = ½.
Akan dibuktikan bahwa Sistem 1 tidak mempunyai penyelesaian.
Misalkan memenuhi q ≤ 0
Karena ≥ 0 maka
½$ = (q$ )$
= $q ≤ 0
Sekarang misalkan bahwa Sistem 2 tidak mempunyai penyelesaian.
Misalkan n = = q$ , ≥ 0 yang adalah himpunan konveks tertutup tidak
kosong dan ½ ∉ n.
Akan dibuktikan bahwa Sistem 1 mempunyai penyelesaian.
Melalui Teorema (2.50) terdapat T ∈ ℝ dan ∈ ℝ sehingga
T$½ > dan T$ ≤ , ∀ ∈ n.
Karena 0 ∈ n, ≥ T$0 = 0. Maka T$½ > 0. Perhatikan pula bahwa ≥ T$ = T$q$
= q$ $T
= $qT, ∀ ≥ 0
Karena ≥ 0 maka qT ≤ 0. Jadi ada vektor T ∈ ℝ yang merupakan
penyele-saian dari Sistem 1.
C. Teori Optimasi
Teori optimasi merupakan salah satu bidang dalam matematika terapan
dan riset operasi yang dapat diaplikasikan dalam bidang sains, teknik,
maneje-men bisnis dan militer. Melalui teori optimasi ini masalah-masalah yang
diha-dapi akan didefinisikan secara matematis dan diselesaikan dengan menggunakan
alat bantu matematika sehingga diperoleh penyelesaian dari masalah tersebut.
min B( )
∈ Á (2.26)
dengan x adalah vektor diℝ , B( ) adalah fungsi objektif, Á ⊂ ℝ adalah
him-punan kendala atau daerah layak.
Masalah optimasi ini juga terbagi menjadi dua bagian, yaitu masalah
op-timasi berkendala dan masalah opop-timasi tanpa kendala. Jika himpunan kendala
Á = ℝ maka (2.26) merupakan masalah optimasi tanpa kendala dengan bentuk
umum:
ÂÃÄ
∈ℝÅB( ) (2.27)
Untuk masalah optimasi berkendala memiliki bentuk umum sebagai berikut:
min ∈ℝÅB( ) (2.28)
½Z( ) = 0, c = 1, … , !Æ (2.29) ½Z( ) ≥ 0, c = !Æ+ 1, … , ! (2.30)
dengan E dan I masing-masing adalah himpunan indeks dari kendala berupa
per-samaan dan kendala berupa pertidakper-samaan, ½Z( ), (c = 1, … , ! ∈ ‰ ∪ Š)
meru-pakan fungsi kendala. ‰ = 1, … , !Æ dan Š = !Æ+ 1, … , ! dimana !Æ dan
! adalah bilangan bulat tak negatif dengan 0 ≤ !Æ ≤ !.
Dilihat dari bentuk fungsi objektif dan fungsi kendala, masalah optimasi
ini dapat dibagi pula menjadi dua bagian. Jika fungsi objektif maupun fungsi
objektifnya tidak linear maka merupakan masalah optimasi nonlinear. Sebuah
fungsi dikatakan fungsi linear jika memenuhi syarat-syarat berikut:
1. Fungsi yang belum diketahui dan derivatif-derivatifnya secara aljabar hanya
berderajat satu.
2. Tidak ada hasil kali yang berkaitan dengan fungsi yang belum diketahui dan
derivatif-derivatifnya atau dua atau lebih derivatif.
3. Tidak memuat fungsi transendental.
Fungsi yang tidak linear merupakan fungsi nonlinear.
Definisi 2.52
Titik ∈ ℝ dikatakan sebagai titik layak atau disebut juga penyelesaian
layak jika dan hanya jika memenuhi semua kendala pada persamaan dan
perti-daksamaan (2.29)-(2.30). Himpunan semua titik layak dikatakan himpunan layak
atau daerah layak.
Definisi 2.53
Penyelesaian optimum merupakan penyelesaian layak yang memiliki nilai
Definisi 2.54
Misalkan nilai optimal dari masalah optimasi dinotasikan dengan È∗ yang
meru-pakan nilai minimum dari fungsi objektif dalam daerah layak, yakni
È∗= min •( ): ½c( )= 0, c = 1, … , !Ê, ½c( )≥ 0, c = !Ê+ 1, … !
Masalah optimasi dikatakan tidak layak jika daerah layaknya kosong dan È∗
ber-nilai +∞. Masalah optimasi dikatakan tidak terbatas ke bawah jika ada titik
layak sedemikian sehingga •( ) → −∞ atau È∗ bernilai −∞.
Secara umum metode optimasi adalah metode iterasi yang bertujuan
un-tuk mencari peminimum dari sebuah masalah optimasi. Metode iterasi mengacu
pada berbagai teknik yang menggunakan aproksimasi pada setiap langkahnya
untuk mendapatkan penyelesaian yang lebih akurat dari masalah-masalah
opti-masi baik masalah optiopti-masi linear maupun nonlinear. Metode ini diawali dengan
memberikan nilai awal ¥ ∈ ℝ . Kemudian dibangun barisan iterasi I
mela-lui beberapa aturan iterasi sehingga ketika barisan I adalah berhingga maka
titik akhirnya adalah penyelesaian optimum dari masalah optimasi. Jika barisan
I adalah tak hingga maka barisan tersebut memiliki titik limit yang adalah
Definisi 2.55
Titik ∗ dikatakan peminimum lokal jika ada 9 > 0 sedemikian sehingga
B( ∗) ≤ B( ) untuk semua ∈ ℝ memenuhi < − ∗< < 9.
Titik ∗ dikatakan peminimum lokal tegas jika ada 9 > 0 sedemikian sehingga
B( ∗) < B( ) untuk semua ∈ ℝ dengan ≠ ∗ dan < − ∗< < 9.
Definisi 2.56
Titik ∗ dikatakan peminimum global jika B( ∗) ≤ B( ) untuk semua ∈ ℝ .
Titik ∗ dikatakan peminimum global tegas jika B( ∗) < B( ) untuk semua
∈ ℝ dengan ≠ ∗.
Definisi 2.57
Misalkan B: ℝ¼ ⟶ ℝ terdiferensialkan pada ∈ ℝ . Jika terdapat vektor
¢ ∈ ℝ sehingga:
M∇B( ), ¢N < 0
maka¢ disebut arah turun dari fungsi B di .
Definisi 2.58
Titik ∗ ∈ ℝ dikatakan titik stasioner (atau kritis) untuk B yang