ABSTRAK
Untuk menyelesaikan masalah program linear, selain dengan metode grafik atau metode simpleks dapat juga diselesaikan dengan metode titik-dalam. Salah satu kelas dalam metode titik-dalam adalah metode primal affine-skaling. Untuk menentukan penyelesaian masalah program linear dengan metode primal affine-skaling dimulai dengan memilih titik-dalam awal, yaitu dari suatu daerah layak di ruang penyelesaian awal. Kemudian ditransformasi oleh transformasi affine-skaling, yaitu sedemikian sehingga hasil transformasi diposisikan dekat dengan pusat di ruang penyelesaian hasil transformasi ini. Hasil transformasi sebut saja . Langkah selanjutnya, dari dijalankan ke titik-dalam lain, yaitu
yang menggerakkan nilai sampai optimum dicapai sesuai dengan alur iterasi , dengan adalah arah layak turun tercuram (steepest descent) yang menyebabkan nilai fungsi berkurang dengan cepat. Dan
k x k
x k
T xk
k x k
y yk
1 + k
y f f
k y k k k
d y
y +1 = +α dky
k
α adalah besarnya langkah yang menyatakan seberapa jauh arah tersebut akan menuju ke titik optimum yang tetap berada pada daerah layak. Penyelesaian yang didapat di ruang penyelesaian tersebut ditransformasikan kembali dengan transformasi invers, yaitu
. Proses iterasi ini diulang hingga penyelesaian optimum dicapai. 1
− k T
ABSTRACT
Linear programming problems not only can be solved with graphic method or simplex method, but also it can be solved with interior-point method. One of the classes of the interior-point method is primal affine-scaling method. To find the solution of linear programming using primal affine-scaling method, we should start by selecting the interior-point solution , namely from inside feasible region in original solution space. Then, is transformed with an affine-scaling transformation, which is called , so that the selected interior-point solution is placed near the transformed feasible region. The image of called . Then, from we move to another interior-point , which improves the value of objective function , in accordance to the iteration . Here, is the direction of steepest descent that causes the fastest rate of decrease in the objective function. While
k x k
x k T
k
x yk
k
y yk+1
f yk+1 =yk +αkdky dky
k
α is the step-length which gives how far the direction can move to the optimum point but it still remains in the feasible region. The solution, which is found in the solution space, is transformed back with inverse transformation, called . This process will be repeated until we obtain an optimum solution with the desired accuracy.
1 − k T
METODE PRIMAL AFFINE-SKALING
UNTUK MASALAH PROGRAM LINEAR
Skripsi
Diajukan untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Sains
Program Studi Matematika
Oleh: Ajeng Retnojiwati
NIM : 013114013
PROGRAM STUDI MATEMATIKA JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SANATA DHARMA YOGYAKARTA
2007
HALAMAN PERSEMBAHAN
“Dan apa saja yang kamu minta dalam doa dengan penuh
kepercayaan, kamu akan menerimanya.”
(Mat ius 21:22)
Terimakasih Tuhan Yesus
Engkau bantu aku melewati satu pergumulan lagi dalam hidup
Kupersembahkan karya ini untuk:
Tuhan Yesus dan Bunda Maria
Bapak, Ibu, Mas Purwiyadi, Mas
Sugeng, simbah dan keluargaku
ABSTRAK
Untuk menyelesaikan masalah program linear, selain dengan metode grafik atau metode simpleks dapat juga diselesaikan dengan metode titik-dalam. Salah satu kelas dalam metode titik-dalam adalah metode primal affine-skaling. Untuk menentukan penyelesaian masalah program linear dengan metode primal affine-skaling dimulai dengan memilih titik-dalam awal, yaitu dari suatu daerah layak di ruang penyelesaian awal. Kemudian ditransformasi oleh transformasi affine-skaling, yaitu sedemikian sehingga hasil transformasi diposisikan dekat dengan pusat di ruang penyelesaian hasil transformasi ini. Hasil transformasi sebut saja . Langkah selanjutnya, dari dijalankan ke titik-dalam lain, yaitu
yang menggerakkan nilai sampai optimum dicapai sesuai dengan alur iterasi , dengan adalah arah layak turun tercuram (steepest descent) yang menyebabkan nilai fungsi berkurang dengan cepat. Dan
k x k
x k
T xk
k x k
y yk
1 + k
y f f
k y k k k
d y
y +1 = +α dky
k
α adalah besarnya langkah yang menyatakan seberapa jauh arah tersebut akan menuju ke titik optimum yang tetap berada pada daerah layak. Penyelesaian yang didapat di ruang penyelesaian tersebut ditransformasikan kembali dengan transformasi invers, yaitu
. Proses iterasi ini diulang hingga penyelesaian optimum dicapai. 1
− k T
ABSTRACT
Linear programming problems not only can be solved with graphic method or simplex method, but also it can be solved with interior-point method. One of the classes of the interior-point method is primal affine-scaling method. To find the solution of linear programming using primal affine-scaling method, we should start by selecting the interior-point solution , namely from inside feasible region in original solution space. Then, is transformed with an affine-scaling transformation, which is called , so that the selected interior-point solution is placed near the transformed feasible region. The image of called . Then, from we move to another interior-point , which improves the value of objective function , in accordance to the iteration . Here, is the direction of steepest descent that causes the fastest rate of decrease in the objective function. While
k x k
x k T
k
x yk
k
y yk+1
f yk+1 =yk +αkdky dky
k
α is the step-length which gives how far the direction can move to the optimum point but it still remains in the feasible region. The solution, which is found in the solution space, is transformed back with inverse transformation, called . This process will be repeated until we obtain an optimum solution with the desired accuracy.
1 − k T
KATA PENGANTAR
Puji syukur penulis panjatkan kepada Tuhan Yesus atas segala kasih dan perlindungan-Nya sehingga penulisan skripsi ini dapat terselesaikan. Skripsi ini disusun dalam rangka melengkapi salah satu syarat untuk memperoleh gelar Sarjana Sains pada Program Studi Matematika, Jurusan Matematika, Fakultas Matematika dan Ilmu Alam, Universitas Sanata Dharma Yogyakarta.
Penulisan skripsi ini tidak lepas dari bantuan dan dukungan dari berbagai pihak. Oleh karena itu, pada kesempatan ini penulis ingin menyampaikan ucapan terima kasih kepada:
1. Ibu Lusia Krismiyati, S.Si, M.Si sebagai dosen pembimbing yang penuh perhatian dan kesabaran telah membimbing serta memberi saran dan kritik kepada penulis selama proses penulisan skripsi ini.
2. Bapak Y.G. Hartono, S.Si, M.Sc sebagai dosen pembimbing dan selaku Ketua Program Studi Matematika, dosen pembimbing akademik dan dosen penguji yang telah memberikan dukungan, saran dan kritik dalam skripsi ini.
3. Bapak Ir. Ig. Aris Dwiatmoko, M.Sc selaku Dekan fakultas MIPA yang telah memberi dukungan dalm penulisan skripsi ini.
4. Ibu Any Herawati, S.Si, M.Si selaku dosen penguji yang telah memberikan saran dan kritik dalam skripsi ini.
5. Bapak dan Ibu dosen di Fakultas MIPA yang telah membimbing dan mendidik penulis selama menuntut ilmu di Universitas Sanata Dharma.
6. Bapak dan Ibu karyawan Universitas Sanata Dharma, khususnya sekretariat fakultas MIPA dan perpustakaan Universitas Sanata Dharma atas segala bantuan dan fasilitas yang telah diberikan.
7. Sahabat-sahabatku seperjuangan angkatan 2001: Very, Upik, Yuli, Dani, Tabita, Fanya, Andre, Indah, Ariel, Agnes, Erika, Wiwit, Deta, Maria, Rita, Alam, Vrysca, Daniel, Tedy, Ray, April, Ardi, serta kakak-kakak angkatan 1998, 1999, 2000 dan adik-adik angkatan 2002, 2003, 2004 yang telah membantu dan mendukung penulis.
8. Dhe-dhe dan keluarga yang telah memberi dukungan, semangat dan doanya. 9. Tien, Mei, Bayu, Helbin, Sinta, Heni, Henri, Mbak uci dan keluarga, mbak Novi,
Murni, Rini ikom, teman-teman Gloria Graha dan temen-temen radio masdha, yang telah memberi dukungan, semangat dan doanya.
10.Semua pihak yang telah membantu penulis baik secara langsung maupun tidak langsung hingga selesainya penulisan skripsi ini.
Penulis menyadari bahwa skripsi ini masih banyak kekurangannya. Oleh karena itu, penulis mengucapkan terima kasih bila ada kritik dan saran yang dapat membangun penulis. Penulis berharap semoga skripsi ini dapat bermanfaat dan menjadi referensi bagi pembaca.
Yogyakarta, 7 Februari 2007
Penulis
DAFTAR ISI
Halaman
HALAMAN JUDUL ……….…………..…. i
HALAMAN PERSETUJUAN PEMBIMBING ……….……….. ii
HALAMAN PENGESAHAN ……….. iii
HALAMAN PERSEMBAHAN ……….…..…… iv
PERNYATAAN KEASLIAN KARYA ……….……….…. v
ABSTRAK ……….……….….. vi
ABSTRACT ……….……….... vii
KATA PENGANTAR ……….……….…… viii
DAFTAR ISI ……….……….….. x
DAFTAR GAMBAR ………..… xiii
TABEL ……… xiii
BAB I PENDAHULUAN ………..…... 1
A. Latar Belakang Masalah ……….…. 1
B. Rumusan Masalah ……….…...…… 3
C. Pembatasan Masalah ……….…………...…. 4
D. Tujuan Penulisan ……….….. 4
E. Manfaat Penulisan ……... 4
F. Metode Penulisan ………..…………..…….. 5
G. Sistematika Penulisan ……….……….. 5
BAB II ORTOGONALITAS DAN OPTIMISASI UNTUK PERSOALAN
LINEAR ………. 6
A. Sistem Persamaan Linear Dan Matriks ………...…………. 6
B. Ruang Vektor ………..……….… 10
1. Ruang Vektor ………..…..………..………... 10
2. Hasil Kali Dalam Dan Ortogonalitas …... 22
3. Transformasi Linear ……….………… 31
C. Masalah Program Linear ………...…. . 32
1. Bentuk Standar Masalah Program Linear ……….. 32
2. Dualitas ………. . 37
D. Optimisasi Fungsi Untuk Persoalan Linear ………..…… 40
1. Optimisasi ……….. 40
2. Kelayakan ………...….... 41
E. Metode Arah Layak ………...…... 42
F. Metode Arah Turun Tercuram (Steepest Descent) …………... 44
BAB III METODE PRIMAL AFFINE-SKALING ………..…. 45
A. Metode Primal Affine-Skaling ………..……. 46
1. Transformasi Affine-Skaling ……….... 49
2. Menentukan Arah Layak ………..… 61
a. Bentuk Masalah Program Linear di Ruang Penyelesaian Hasil Transformasi ………. 61
b. Menentukan Arah Layak ………..…… 66
c. Perumusan Arah Langkah Dengan Arah Turun Tercuram ... 70
3. Menentukan Besar Langkah αk ………..………...…… 74
B. Algoritma Primal Affine-Skaling ………...…..… 83
C. Aplikasi Metode Primal Affine-Skaling Untuk Menyelesaikan Masalah Program Linear Dengan Program Matlab ………...… 87
BAB IV PENUTUP ...….. 99
A. Kesimpulan ………...…….. 99
B. Saran ………...… 100
DAFTAR PUSTAKA ………. 101
LAMPIRAN ……….. 102
DAFTAR GAMBAR
Halaman
Gambar 1.1 Metode titik-dalam vs metode simpleks ……….. 2
Gambar 2.1 c=x+y ……….…. 28
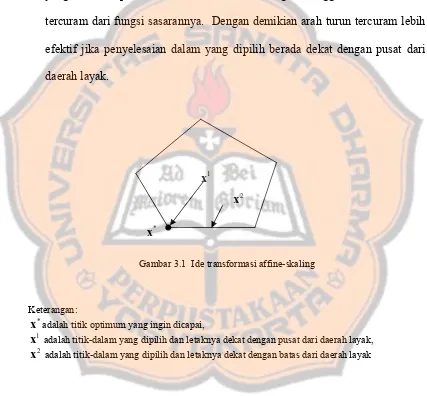
Gambar 3.1 Ide transformasi affine-skaling ……….…………...…… 50
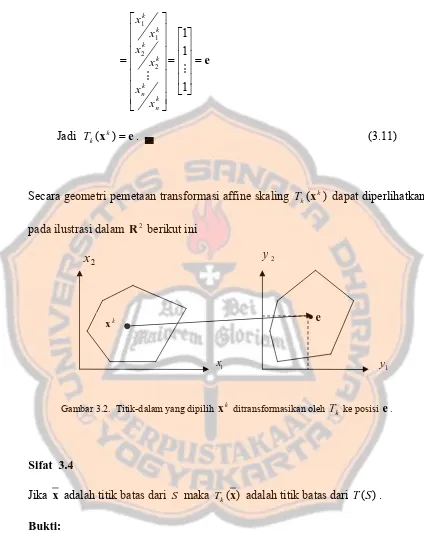
Gambar 3.2 Titik-dalam xk ditransformasikan oleh Tk ke posisi e ………... 54
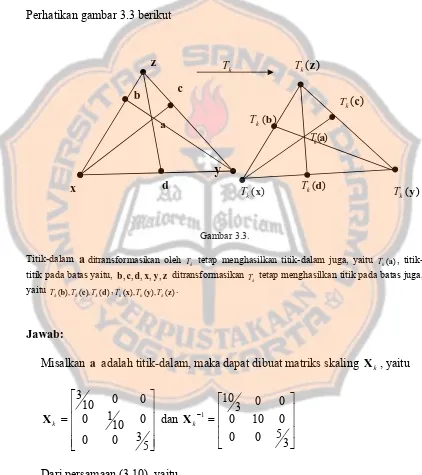
Gambar 3.3 Sifat-sifat dari transformasi affine-skaling ………. 59
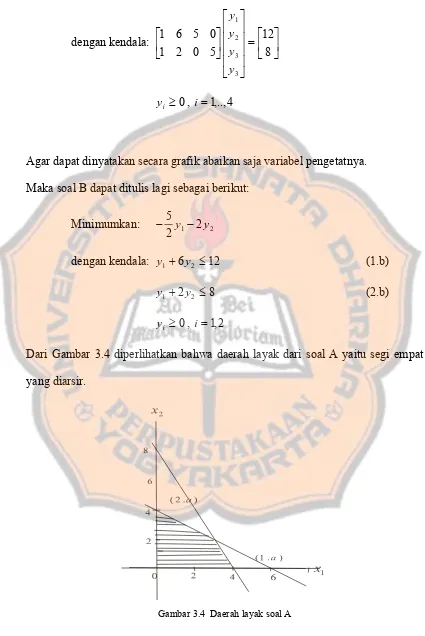
Gambar 3.4 Daerah layak soal A ……… 65
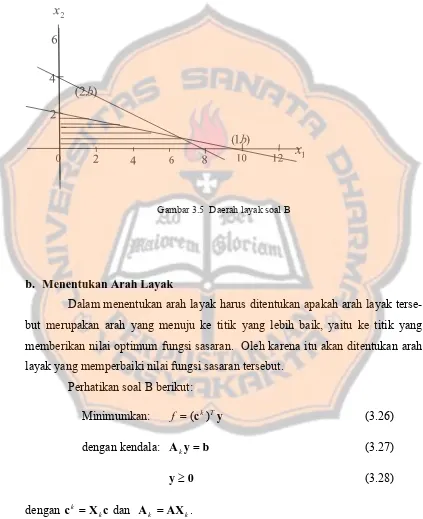
Gambar 3.5 Daerah layak soal B ………...…. 66
Gambar 3.6 Proyeksi k ke ruang nol ……….. 71
c − Ak Gambar 3.7 Daerah layak sebelum dikenai transformasi affine skaling ……... 94
Gambar 3.8 Daerah layak yang sudah ditransformasi oleh transformasi affine skaling ……….. 95
TABEL Halaman Tabel 1 Hasil iterasi contoh 3.4 ………..…………. 103
Tabel 2 Hasil iter5asi contoh 3.5 ………. 104
BAB I
PENDAHULUAN
A. LATAR BELAKANG MASALAH
Masalah program linear adalah suatu masalah penyelesaian sistem
per-samaan linear. Masalah program linear dapat diselesaikan dengan cara metode
grafik atau metode simpleks. Pada metode grafik penyelesaiannya khusus
dikerja-kan hanya untuk dua variabel saja, sehingga apabila memuat lebih dari dua
varia-bel akan sulit menyelesaikannya. Meskipun dalam prakteknya masalah program
linear jarang yang hanya memuat dua variabel tetapi metode grafik
mempermu-dahkan orang dalam memahami pengertian-pengertian yang timbul dalam
ma-salah program linear. Untuk menyelesaikan mama-salah program linear yang memuat
dua atau lebih variabel dapat digunakan metode simpleks.
Ada metode lain yaitu metode titik-dalam yang dapat digunakan untuk
menyelesaikan masalah program linear yang memuat dua atau lebih variabel.
Perbedaan proses penyelesaian antara metode simpleks dan metode
titik-dalam, yaitu pada metode simpleks penyelesaian dilakukan dengan meninjau
setiap titik-titik sudut pada batas dari daerah layak hingga dicapai titik optimum.
Sedangkan pada metode titik-dalam dengan meninjau titik-titik yang berada dalam
daerah layak hingga dicapai titik optimum. Sehingga apabila program linear
me-muat masalah yang kompleks maka proses penyelesaian yang dilakukan dengan
metode titik-dalam dapat lebih cepat dan efisien dibandingkan dengan metode
yang kompleks maka program linear tersebut juga akan memiliki banyak titik
ba-tas. Sehingga dibutuhkan proses lebih panjang dibandingkan dengan metode
titik-dalam untuk mencapai titik optimum.
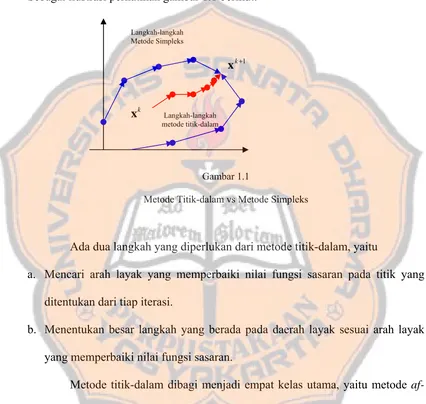
Sebagai ilustrasi perhatikan gambar 1.1 berikut:
Gambar 1.1
Metode Titik-dalam vs Metode Simpleks
Ada dua langkah yang diperlukan dari metode titik-dalam, yaitu
a. Mencari arah layak yang memperbaiki nilai fungsi sasaran pada titik yang
ditentukan dari tiap iterasi.
b. Menentukan besar langkah yang berada pada daerah layak sesuai arah layak
yang memperbaiki nilai fungsi sasaran.
Metode titik-dalam dibagi menjadi empat kelas utama, yaitu metode af-fine-skaling (affine-scaling method), metode proyektif (projective method) atau lebih dikenal dengan metode Karmarkar , metode path-following (path-following method), dan metode potensial-reduksi (potential-reduction method).
Dalam tulisan ini hanya akan dibahas metode affine-skaling. Metode af-fine-skaling adalah salah satu metode titik-dalam yang paling sederhana diantara
k x
Langkah-langkah Metode Simpleks
1
+ k x
semua metode titik-dalam. Disebut metode affine-skaling karena transformasi yang digunakan adalah transformasi affine-skaling. Metode affine-skaling yang akan digunakan dibatasi hanya untuk masalah primal program linear yang
meminimumkan fungsi sasaran. Sehingga metode ini disebut juga sebagai
me-tode primal affine-skaling.
Ide dasar metode primal affine-skaling yaitu dimulai dengan memilih suatu titik-dalam awal didalam daerah layak. Kemudian titik dalam yang dipilih
ditransformasi oleh transformasi affine-skaling sedemikian sehingga hasil transformasi titik-dalam yang dipilih diposisikan dekat dengan pusat di ruang
penyelesaian hasil transformasi. Hasil transformasi titik-dalam yang dipilih
dijalankan ke suatu titik-dalam lain dengan arah layak dan besar langkah yang
sesuai. Penyelesaian yang didapat di ruang penyelesaian tersebut ditransformasi
kembali dengan transformasi invers yang sesuai. Proses iterasi ini diulang hingga
penyelesaian optimum dicapai.
Selain dibahas metode primal affine-skaling juga akan dibahas aplikasinya dengan menggunakan program matlab untuk menyelesaikan masalah
program linear.
B. RUMUSAN MASALAH
Berdasarkan latar belakang masalah di atas, maka dibuat rumusan
seba-gai berikut:
1. Bagaimana menyelesaikan masalah program linear dengan menggunakan
2. Bagaimana aplikasi dari metode primal affine-skaling dengan mengguna-kan program matlab?
C. PEMBATASAN MASALAH
1. Penulis hanya akan membahas masalah dalam bentuk meminimumkan,
se-hingga masalah memaksimumkan harus diubah dalam bentuk
memini-mumkan, yaitu negatif dari maksimum fungsinya.
2. Metode yang digunakan adalah metode primal affine-skaling. 3. Transformasi yang digunakan adalah transformasi affine-skaling.
4. Daerah layak dari soal program linear adalah terbatas dan tidak kosong.
5. Hanya memuat variabel kurang dari atau sama dengan 10 (n≤10).
D. TUJUAN PENULISAN
Sesuai dengan latar belakang di atas, penulisan skripsi ini bertujuan
un-tuk menunjukkan langkah-langkah metode primal affine-skaling untuk menyele-saikan masalah program linear yang memuat n≤10 dan dapat dipertanggung-jawabkan langkah demi langkah.
E. MANFAAT PENULISAN
Manfaat dari penulisan skripsi ini adalah memberikan tambahan referensi
F. METODE PENULISAN
Metode yang digunakan dalam skripsi ini adalah penelitian kepustakaan,
yaitu dengan mempelajari buku-buku yang berkaitan dengan topik skripsi ini,
se-hingga dalam tulisan ini tidak ditemukan hal-hal yang baru.
G. SISTEMATIKA PENULISAN
Penulisan skripsi ini menggunakan sistematika sebagai berikut:
Bab I PENDAHULUAN
Bab ini berisi latar belakang masalah, perumusan masalah, pembatasan
masalah, tujuan penulisan, manfaat penulisan, dan metode penulisan.
Bab II ORTOGONALITAS DAN OPTIMISASI UNTUK PERSOALAN
LINEAR
Bab ini berisi tentang dasar teori yang berkaitan dan digunakan dalam
metode primal affine-skaling, yaitu mengenai sistem persamaan linear dan matriks, ruang vektor, masalah program linear, optimisasi fungsi
untuk persoalan linear, metode arah layak dan metode arah turun
tercuram.
Bab III METODE PRIMAL AFFINE-SKALING
Bab ini membahas tentang langkah-langkah metode primal affine-skaling dan aplikasinya menggunakan program matlab.
Bab IV PENUTUP
Bab ini berisi beberapa kesimpulan dan saran berdasarkan hasil
BAB II
ORTOGONALITAS DAN OPTIMISASI UNTUK PERSOALAN LINEAR
Pada bab ini akan dibahas hal-hal yang melandasi bab berikutnya.
De-finisi, teorema serta konsep-konsep mengacu pada daftar pustaka.
A. Sistem Persamaan Linear Dan Matriks Definisi 2.1 Persamaan Linear
Persamaan linear dalam n variabel x1,x2,L,xn adalah persamaan yang dapat dinyatakan dalam bentuk
b x a x
a x
a1 1+ 2 2 +L+ n n = (2.1)
dengan a1,a2,K,an dan b adalah konstanta real dan a1,a2,K,an tidak semua
sama dengan nol.
Definisi 2.2 Sistem Persamaan Linear
Suatu sistem persamaan linear m×n adalah himpunan m persamaan linear dengan n variabel, yang dapat dinyatakan dalam bentuk
⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧
1 1
1 21
1 11
x a
x a
x a
m
M
+ + +
2 2
2 22
2 12
x a
x a
x a
m +
+ +
L O L L
+ + +
m n mn
n n
n n
b x a
b x a
b x a
= = =
M
2 2
1 1
(2.2)
Dalam sistem persamaan linear m×n, dapat terjadi
n m n
m n
m= , > atau < . Apabila x1 =t1,x2 =t2,L,xn =tn dimana t1,t2,K,tn
adalah konstanta-konstanta real yang memenuhi semua persamaan linear dalam
sistem (2.2), maka pasangan terurut (t1,t2,K,tn) disebut penyelesaian atau
jawab dari sistem persamaan linear (2.2).
Definisi 2.3 Konsisten dan Tidak Konsisten
1. Sistem persamaan linear disebut konsisten jika sistem persamaan tersebut mempunyai penyelesaian.
2. Sistem persamaan linear disebut tidak konsisten jika sistem persamaan terse-but tidak mempunyai penyelesaian.
Sistem yang konsisten dapat mempunyai tepat satu penyelesaian atau mempunyai
banyak penyelesaian.
Sistem persamaan linear (2.2) di atas dapat dituliskan dengan notasi
ma-triks sebagai berikut:
⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡
= ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡
⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡
m n
mn m
m
n n
b b b
x x x
a a
a
a a
a
a a
a
M M
L M O M M
L L
2 1 2
1
2 1
2 22
21
1 12
11
(2.3)
Atau lebih singkat ditulis Ax=b, dimana A=(aij) yaitu matriks koefisien,
( )
xj=
Definisi 2.4Sistem Persamaan Linear Homogen
Suatu sistem persamaan linear disebut sistem persamaan linear homogen jika konstanta 0bi = , untuk setiap i=1,2,...,m. Sistem persamaan linear homogen mempunyai bentuk umum:
⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧ 1 1 1 21 1 11 x a x a x a m M + + + 2 2 2 22 2 12 x a x a x a m + + + L O L L + + + 0 0 0 2 1 = = = n mn n n n n x a x a x a
M (2.4)
Sistem persamaan linear homogen selalu konsisten karena
0 ..., , 0 , 0 2
1 = x = xn =
x selalu merupakan penyelesaian. Penyelesaian ini disebut
penyelesaian trivial. Jika ada penyelesaian lain maka penyelesaian itu disebut
penyelesian nontrivial.
Definisi 2.5Matriks Lengkap
Matriks lengkap dari sistem persamaan linear (2.2) adalah
⎢ ⎢ ⎢ ⎢ ⎣ ⎡ 1 21 11 m a a a M 2 22 12 m a a a L O L L mn n n a a a M 2 1 ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ m b b b M 2 1
Definisi 2.6Operasi Baris Elementer
Operasi baris elementer pada suatu matriks adalah salah satu operasi:
2. Mengalikan suatu baris dengan konstanta tak nol, yakni mengalikan baris ke-i
dengan bilangan c,c≠0, dengan notasi cRi.
3. Mengganti suatu baris dengan hasil penjumlahan baris tersebut dan kelipatan
baris lain, yakni mengganti baris ke-i ditambah c kali baris ke- j, dengan no-tasi Ri +cRj.
Definisi 2.7 Matriks Ekivalen Baris
Matriks B dikatakan ekivalen baris dengan matriks A jika terdapat matriks ele-menter E1,E2,...,Ek sehingga B=EkEk−1...E1A atau A=E1−1E2−1...Ek−1B.
Dengan operasi baris elementer, matriks lengkap dari suatu sistem
per-samaan linear harus diubah menjadi suatu matriks dari sistem perper-samaan linear
yang mudah dicari jawabnya, yakni dengan matriks eselon.
Definisi 2.8Matriks Eselon
Matriks E disebut matriks eselon jika memenuhi dua sifat berikut:
1. Setiap baris yang hanya terdiri dari bilangan nol terletak sesudah baris yang
memuat elemen tak nol.
2. Pada setiap baris dari matriks E yang mempunyai elemen tak nol, elemen tak nol yang pertama harus terletak di kolom sebelah kanan elemen tak nol dari
baris sebelumnya.
B.Ruang Vektor 1. Ruang Vektor
Definisi 2.9 Ruang Vektor
Ruang Vektor atas lapangan F adalah himpunan tidak kosong V yang dileng-kapi dengan operasi penjumlahan dan operasi perkalian dengan skalar sedemikian
sehingga ∀x,y,z∈V dan ∀α,β∈F memenuhi syarat - syarat berikut: a. x+y∈V
b. x+y =y+x (sifat komutatif)
c. x+(y+z)=(x+y)+z (sifat asosiatif)
d. Terdapat elemen 0∈V,∀x∈V , x+0=x (unsur identitas)
e. ∀x∈V ∃(−x)∈V sehingga x+(−x)=0 (elemen invers)
f. αx∈V
g. α(x+y)=αx+αy (sifat distributif)
h. (α+β)x=αx+βx
i. 1x=x
j. (αβ)x=α(βx)
Contoh 2.1 Misalkan ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n x x x M 2 1 x dan ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n y y y M 2 1
y adalah vektor – vektor di Rn. Penjumlahan
pada Rn didefinisikan sebagai berikut:
n
n n n
n x y
y x y x y y y x x x R y x y
x ∀ ∈
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ =
+ 2 2 , ,
1 1 2 1 2 1 M M
M (2.5)
dan operasi perkalian dengan skalar α di R didefinisikan sebagai berikut:
R R
x
x ∀ ∈ ∀ ∈
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = α α α α α
α 2 , ,
1 2 1 n n n x x x x x x M
M (2.6)
Tunjukkan bahwa Rn merupakan ruang vektor. Bukti: Misalkan ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n x x x M 2 1 x , ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n y y y M 2 1
y , dan
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n z z z M 2 1
z , ∀x,y,z∈Rn, ∀α,β∈R
a. Akan ditunjukkan x+y∈Rn. Sudah jelas (dari persamaan (2.5)) b. Akan ditunjukkan x+y=y+x
x y y
x = +
c. Akan ditunjukkan x+(y+z)=(x+y)+z ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + + + + = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = + + ) ( ) ( ) ( )
( 2 2 2
1 1 1 2 2 1 1 2 1 n n n n n
n x y z
z y x z y x z y z y z y x x x M M M z y x ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + + + + = n n n y z x z y x z y x ) ( ) ( ) ( 2 2 2 1 1 1 M ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + = n n n z z z y x y x y x M M 2 1 2 2 1 1 z y x+ +
=( )
d. Akan ditunjukkan ada elemen identitas terhadap operasi penjumlahan.
Elemen identitasnya
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = 0 0 0 M
0 sehingga
x 0 x = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = + n n n x x x x x x x x x M M M M 2 1 2 1 2 1 0 0 0 0 0 0
e. Akan ditunjukkan mempunyai invers.
Invers dari
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n x x x M 2 1
x adalah
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − = − n x x x M 2 1
x sehingga
0 x x = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − + − + − + = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = − + 0 0 0 ) ( ) ( ) ( )
( 2 2
1 1 2 1 2 1 M M M M n n n
n x x
x x x x x x x x x x
g. Akan ditunjukkan α(x+y)=αx+α y
y x y
x α α
α α α α α α α α α α α α α α = + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + = + n n n n n n y y y x x x y x y x y x y x y x y x M M M M 2 1 2 1 2 2 1 1 2 2 1 1 ) (
h. Akan ditunjukkan (α +β)x=αx+βx
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + = + n n n n n n x x x x x x x x x x x x x x x x x x β β β α α α β α β α β α β α β α β α β α β α M M M M M 2 1 2 1 2 2 1 1 2 1 2 1 ) ( ) ( ) ( ) ( ) ( x x x β α + =
i. Akan ditunjukkan ada elemen identitas terhadap operasi perkalian
x x = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n n n x x x x x x x x x M M M 2 1 2 1 2 1 1 1 1 1 1
j. Akan ditunjukkan (αβ)x=α(βx)
) ( _) ( ) ( ) ( ) ( ) ( ) ( ) ( 2 1 2 1 2 1 2 1 x
x α β
β β β α β α β α β α β α β α β α αβ β α = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n n n n x x x x x x x x x x x x M M M
M . ~
Definisi 2.10 Subruang (Subspaces)
a. untuk x∈W dan sebarang skalar α∈F maka αx∈W
b. untuk x∈W dan y∈W maka vektor x+y∈W
maka W disebut subruang vektor dari V .
Definisi 2.11 Ruang Nol (Null Spaces)
Misalkan A adalah matriks berukuran m×n. Misalkan N(A) menyatakan him-punan semua penyelesaian dari sistem persamaan homogen Ax=0. Jadi
} {
)
(A = x∈Rn Ax=0
N (2.7)
) (A
N disebut sebagai ruang nol.
Contoh 2.2
Tunjukkan bahwa N(A)={x∈Rn Ax=0} merupakan ruang vektor.
Bukti: Misalkan ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n x x x M 2 1 x , ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n y y y M 2 1
y , dan
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n z z z M 2 1
z , ∀x,y,z∈Rn, ∀α,β∈R
a. Akan ditunjukkan Ax+Ay∈N(A)
0 0 0 Ay Ax = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = + = + 0 0 0 0 0 0 0 0 0 M M M
Jadi Ax+Ay∈N(A)
= ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = + = + 0 0 0 0 0 0 0 0 0 0 0 0 M M M M 0 0 Ay
Ax 0+0=Ay+Ax
c. Akan ditunjukkan Ax+(Ay+Az)=(Ax+Ay)+Az
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = + + = + + 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 ) ( ) ( M M M M M M 0 0 0 Az Ay Ax Az Ay Ax 0 0
0+ + = + +
=( ) ( )
d. Akan ditunjukkan ada elemen identitas terhadap operasi penjumlahan
Elemen identitasnya
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = 0 0 0 M
0 sehingga
Ax 0 0
0 0
Ax = =
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = + = + 0 0 0 0 0 0 0 0 0 M M M
e. Akan ditunjukkan ada elemen invers
Invers dari
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = = 0 0 0 M 0
Ax adalah
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − = − = − 0 0 0 ) ( M 0
Ax sehingga
f. Akan ditunjukkan αAx∈N(A) ) ( 0 0 0 0 0 0 A 0 0
Ax = ∈N
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = = M M α α α
g. Akan ditunjukkan α(Ax+Ay)=αAx+αAy
(
0 0)
Ax AyAy
Ax α α
α α α α α α α α α = + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = + = + 0 0 0 0 0 0 0 0 0 0 0 0 ) ( M M M M
h. Akan ditunjukkan (α +β)Ax= =αAx+βAx
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + = + = + 0 0 0 0 0 0 0 ) ( 0 ) ( 0 ) ( 0 0 0 ) ( ) ( ) ( β β β α α α β α β α β α β α β α β α M M M M Ax Ax Ax Ax β α + =
i. Akan ditunjukkan ada elemen identitas terhadap operasi perkalian
Ax 0 0
Ax = =
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = = 0 0 0 0 0 0 1 1 1 M M
j. Akan ditunjukkan (αβ)Ax=α(βAx)
) ( 0 0 0 0 ) ( 0 ) ( 0 ) ( 0 0 0 ) ( ) ( )
( Ax Ax α βAx
β β β α αβ αβ αβ αβ αβ αβ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = = M M
Teorema 2.1
} {
)
(A = x∈Rn Ax=0
N merupakan subruang dari n
R .
Bukti:
Akan dibuktikan bahwa N(A) adalah subruang dari n
R , yakni
a. Misalkan x∈N(A) dan α suatu skalar, maka A(αx)=α(Ax)=α0=0. Jadi αx∈N(A).
b.Misalkan x dan y adalah elemen – elemen dari N(A), maka
0 0 0 Ay Ax y x
A( + )= + = + = Jadi )x+y∈N(A .
Dari (a) dan (b) terbukti bahwa N(A) adalah subruang dari Rn. ▄
Definisi 2.12 Kombinasi Linear
Misalkan x1,x2,K,xn adalah vektor – vektor dalam suatu ruang vektor V atas lapangan F . Jumlahan vektor-vektor yang berbentuk
n nx x
x α α
α1 1+ 2 2 +L+ (2.8)
disebut suatu kombinasi linear dari x1,x2,K,xn, dengan skalarα1,K,αn∈F.
Definisi 2.13 Merentang (span)
Jika x1,x2,K,xn adalah vektor-vektor pada ruang vektor V dan jika masing-masing vektor pada V dapat dinyatakan sebagai kombinasi linear dari
n x x
V dan dilambangkan S(x1,x2,K,xn).
Teorema 2.2
Jika x1,x2,K,xn adalah vektor-vektor dalam ruang vektor V maka )
, , ,
( 1 2 n
S x x K x adalah subruang dari V .
Bukti:
Misalkan β suatu skalar dan misalkan b=α1x1+α2x2 +L+αnxn adalah sebarang elemen dari S(x1,x2,K,xn).
Maka βb=(βα1)x1+(βα2)x2 +L+(βαn)xn
Jadi βb∈S(x1,x2,K,xn)
Selanjutnya akan ditunjukkan bahwa sebarang jumlah elemen-elemen dari
) , , ,
( 1 2 n
S x x K x juga berada dalam S(x1,x2,K,xn)
Misalkan b=α1x1+α2x2 +L+αnxn dan c=β1x1+β2x2 +L+βnxn Maka b+c=(α1+β1)x1 +(α2 +β2)x2 +L+(αn +βn)xn
Jadi b+c∈S(x1,x2,K,xn)
Jadi S(x1,x2,K,xn) adalah subruang dari V . ▄
Definisi 2.14 Himpunan Perentang
Himpunan }{x1,x2,K,xn disebut himpunan perentang untuk ruang vektor V
Contoh 2.3
Misalkan ei adalah vektor dalam n
R yang komponen ke-i adalah 1 dan kompo-nen yang lainnya semua sama dengan nol, untuk i=1,2,K,n. Jadi
⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡ = ⎥
⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡ = ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡ =
1 0 0
, ,
0 1 0
,
0 0 1
2 1
M L
M
M e en
e .
Setiap vektor n
R
v∈ dapat dinyatakan sebagai kombinasi linear dari
vektor-vek-tor e1,e2,L,en tersebut, yaitu jika
⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡
=
n v v v
M
2 1
v adalah sebarang vektor dalam n
R ,
maka v =v1e1+v2e2 +L+vnen. Oleh karena itu {e1,e2,L,en}adalah himpunan perentang untuk n
R . ~
Definisi 2.15 Bebas linear (linearly independent)
Vektor – vektor x1,x2,K,xn dalam ruang vektor V disebut bebas linear jika 0
x x
x +α + +αn n =
α1 1 2 2 L (2.9)
mengakibatkan semua skalar – skalar α1,K,αn harus sama dengan nol.
Definisi 2.16 Bergantung Linear (linearly dependent)
Vektor – vektor x1,x2,K,xn dalam ruang vektor V disebut bergantung linear
jika terdapat skalar – skalar α1,K,αn yang tidak semuanya nol sehingga
0 x x
x +α + +αn n =
Definisi 2.17 Basis
Misalkan V suatu ruang vektor atas lapangan F . Himpunan vektor - vektor
{
x1,x2,.K,xn}
membentuk basis untuk ruang vektor V jika dan hanya jikaa.
{
x1,x2,.K,xn}
bebas linearb.
{
x1,x2,.K,xn}
merentang VContoh 2.4
Tunjukkan bahwa
{
e1,e2,K,en}
adalah basis.Bukti:
Dalam contoh 2.3 telah ditunjukkan bahwa e1,e2,K,en merentang n
R . Bila
0 e e
e +v + +vn n =
v1 1 2 2 L maka
⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡
= ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡
0 0 0
2 1
M M
n v v v
, sehingga v1 =v2 =L=vn =0.
Jadi e1,e2,K,en bebas linear.
Maka
{
e1,e2,K,en}
merupakan basis untuk Rn. ~ Basis tersebut disebut basis baku untuk nR
Definisi 2.18 Vektor-Vektor Baris dan Vektor-Vektor Kolom
Misalkan matriks
⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡
=
mn m
m
n n
a a
a
a a
a
a a
a
L M O M M
L L
2 1
2 22
21
1 12
11
A . Vektor-vektor dalam R1×n yaitu
[
a11 a12 a1n]
1 = L
yang dibentuk dari baris-baris matriks A dinamakan vektor-vektor baris dari A
dan vektor-vektor dalam Rm, yaitu
⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡
=
1 21 11
1
m a a a
M
k ,
⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡
=
2 22 12
2
m a
a a
M
k ,
⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡
=
mn n n
n
a a a
M L 2 1
,k
yang dibentuk dari kolom-kolom matriks A, dinamakan vektor-vektor kolom
dari A.
Definisi 2.19 Ruang Baris dan Ruang kolom
a. Subruang yang direntang oleh m vektor baris matriks A merupakan subruang dari R1×n dan disebut ruang baris A.
b. Subruang yang direntang oleh n vektor kolom matriks A merupakan subruang dari Rm dan disebut ruang kolom A. Ruang kolom A dapat dinotasikan
{
m n}
R(A)= b∈R b=Ax untuk x∈R
Definisi 2.20 Rank Dari Matriks
Rank dari matriks A berukuran m×n ditunjukkan dengan r(A). Rank matriks
2. Hasil Kali Dalam Dan Ortogonalitas Definisi 2.21 Ruang Hasil Kali Dalam
Hasil kali dalam pada ruang vektor V adalah sebuah operasi pada V yang menunjuk setiap pasang vektor - vektor x dan y di dalam V sebuah bilangan real x,y yang memenuhi syarat berikut:
a. x,x ≥0,∀x≠0dan x,x =0 jika hanya jika x=0. b. x,y = y,x ∀x,y∈V
c. αx+βy,z =α x,z +β y,z , ∀x,y,z∈V dan ∀α,β∈R
Sebuah ruang vektor V dengan hasil kali dalamnya disebut ruang hasil kali dalam .
Contoh 2.5
Ruang vektor Rn. Tunjukkan bahwa hasil kali skalar yang didefinisikan:
[
]
n nn n T
y x y
x y x y y y x x
x = + + +
⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡
=
= K
M
L 2 1 1 2 2 1
2 1
,y x y
x . (2.11)
adalah hasil kali dalam untuk n
R (yang disebut hasil kali dalam baku). Persamaan (2.11) dapat juga ditulis
∑
=
=
= n
i i i T
y x
1
,y x y
x (2.12)
dengan T
Bukti:
Ambil sebarang vektor
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n x x x M 2 1 x , ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n y y y M 2 1
y , dan
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n z z z M 2 1
z dalam ruang
vektorRn dan sebarang skalar α,β∈R
a. Dibuktikan x,x =xTx≥0
Diketahui x,x =xTx
[
]
0, 2 12 22 2
1
2
1 = + + + ≥
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = = n n n T x x x x x x x x x K M L x x x x
Jadi x,x ≥0
)
(⇒ Diketahui x,x =0
Untuk x12 +x22 +...+xn2 =0 diperoleh x1 = x2 =...= xn =0
jadi x =0
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = 0 0 0 2 1 M M n x x x )
(⇐ Diketahui x=0
Dibuktikan x,x =xTx=0
0 0 x x x
x, = T = T
[
]
Jadi xTx=0.0+0.0+K+0.0=0
b. Dibuktikan x,y = y,x ∀x,y∈Rn
yaitu dibuktikan x,y =xTy =yTx= y,x
y x y x = T
,
[
]
n nn
n x y x y x y
y y y x x
x = + + +
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = K M
L 2 1 1 2 2 1 2 1 n nx y x y x
y + + +
= 1 1 2 2 K
[
]
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n n x x x y y y M L 2 1 2 1 x y x y = ,= T
Jadi xTy =yTx (2.13)
Jadi terbukti n
R y x x y y
x, = , ∀ , ∈
c. Dibuktikan αx+βy,z =α x,z +β y,z , ∀x,y,z∈Rn , ∀α,β∈R
[
]
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + = + n n n z z z y x y x y x M L 2 1 2 2 1 1 , α β α β α β βαx y z
n n n
nz y z y z y z x
z x z
x α α β β β
α + + + + + + +
= 1 1 2 2 K 1 1 2 2 K
) (
)
(x1z1+x2z2 + +xnzn + y1z1 +y2z2 + +ynzn
[
]
[
]
⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡
+ ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡
=
n n
n n
z z z y y
y z
z z x x
x
M L
M
L 2
1
2 1 2
1
2
1 β
α
z y z xT β T
α +
= (2.14)
z y z
x, β ,
α +
=
Jadi terbukti n
R z y x z
y z
x z
y
x+β , =α , +β , , ∀ , , ∈
α
Dari (a), (b), (c) terbukti bahwa hasil kali dalam di ruang vektor Rn adalah hasil kali skalar x,y =xTy. ~
Definisi 2.22 Panjang atau norma
Jika x adalah sebuah vektor di dalam sebuah ruang hasil kali dalam n R , pan-jang atau norma dari x didefinisikan
2 2
2 2 1
)
( T = x +x + +xn
= x x K
x (2.15)
Definisi 2.23 Ortogonal
Dua vektor dalam Rn, yaitu xdany, dikatakan orthogonal, dilambangkan
y x⊥ , jika
0 =
y
xT (2.16)
Definisi 2.24 Subruang Yang Ortogonal
Dua subruang vektor dalam n
X T = ∀ ∈
x y
x 0, dan y∈Y (2.17)
Jika X dan Y saling orthogonal, dapat ditulis sebagai X ⊥Y.
Teorema 2.3 b
Ax= adalah konsisten jika hanya jika b∈R(A)
Bukti:
) (⇒
Akan dibuktikan b∈R(A), artinya bberada di ruang kolom dari R(A) Misalkan A adalah matriks m×n dan x∈Rn
Karena Ax=b adalah konsisten maka Ax=b mempunyai penyelesaian Misalkan x adalah penyelesaian
Maka ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n mn m m n n x x x a a a a a a a a a M L M O M M L L 2 1 2 1 2 22 21 1 12 11 Ax ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + + + + + + + = n mn m m n n n n x a x a x a x a x a x a x a x a x a L M L L 2 2 1 1 2 2 22 1 21 1 2 12 1 11 = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ m b b b M 2 1 b
Atau dapat ditulis
n in i
i
Perhatikan bahwa b merupakan vektor yang direntang oleh vektor-vektor kolom matriks A. Ini berarti b berada di ruang kolom A. Jadi b∈R(A)
) (⇐
Akan dibuktikan Ax=b adalah konsisten
Karena b∈R(A) maka b dapat direntangkan oleh oleh vektor-vektor kolom matriks A, yang dapat ditulis
n in i
i
i a x a x a x b = 1 1+ 2 2 +L+
Berarti
⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡
=
n x x x
M
2 1
x memenuhi sistem Ax=b
Jadi x adalah penyelesaian Jadi Ax=b adalah konsisten. ▄
Teorema 2.4
Misalkan A matriks berukuran m×n . Andaikan matriks A mempunyai rank penuh m. Misalkan N(A) menyatakan ruang nol A dan R A( T) menyatakan ruang kolom dari AT maka N(A) dan R A( T) merupakan subruang yang saling orthogonal.
Bukti:
Misalkan x∈N(A) dan ( T)
R A y∈
Berarti cukup dibuktikan x⊥y, artinya xTy=0, )∀x∈N(A), y∈R(AT
} {
)
(A = x∈Rn Ax=0
N dan
{
n T m}
T
R(A )= y∈R y=A z untunk z∈R
Maka xTy=xT(ATz)=(Ax)Tz
Karena Ax=0
Maka xTy=0Tz
Maka 0xTy=
Jadi x⊥y
Jadi N(A)⊥ ( T)
R A . ▄ )
( T
R A disebut juga sebagai ruang jawab dari y =ATz.
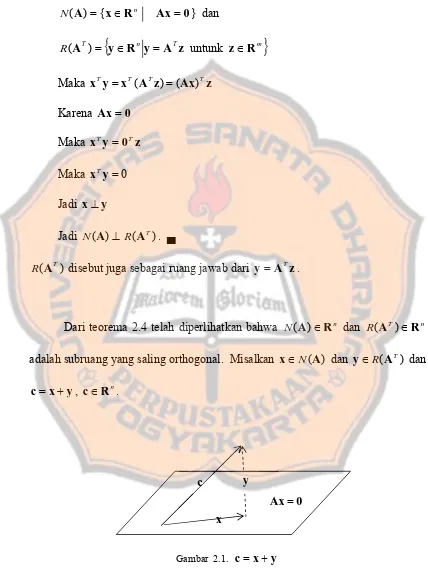
Dari teorema 2.4 telah diperlihatkan bahwa N(A)∈Rn dan R(AT)∈Rn
adalah subruang yang saling orthogonal. Misalkan x∈N(A) dan y∈R A( T) dan
y x
c= + , n R c∈ .
Gambar 2.1. c=x+y c
x
x dapat juga ditulis
y c
x= − (2.18)
Karena y =ATz, maka didapatkan
z A c
x= − T (2.19)
Kalikan kedua ruas dengan A, maka didapatkan
z AA Ac
Ax= − T
Diketahui bahwa Ax=0, maka didapatkan 0=Ac−AATz
z AA Ac= T z =(AAT)−1Ac
(2.20)
Subsitusikan persamaan (2.20) ke persamaan (2.19), maka didapatkan
Ac AA
A c
x= − T( T)−1 =[I−AT(AAT)−1A]c
=Pc (2.21)
dengan ]P=[I−AT(AAT)−1A (2.22)
Definisi 2.25 Matriks Proyeksi Orthogonal
Matriks P berukuran n×n, dengan P=[I−AT(AAT)−1A]
disebut matriks proyeksi ruang nol A atau matriks proyeksi orthogonal.
Perhatikan bahwa y∈R A( T), maka berdasarkan persamaan (2.20)
Rc Ac AA
A z A
dengan R =AT(AAT)−1A (2.24)
Sifat 2.1
Misalkan P adalah matriks proyeksi orthogonal berukuran n×n , dengan ]
) (
[I A AA 1A
P= − T T − maka
a. P2 =P
b. PT =P
Bukti:
a. Diketahui ]P=[I−AT(AAT)−1A
Maka P2 =[I−AT(AAT)−1A] [I−AT(AAT)−1A] =I 2−2I(AT(AAT)−1A)+AT(AAT)−1A
A AA AT( T)−1 = I−2(AT(AAT)−1A)+AT (AAT)−1A
= I−AT(AAT)−1A= P
b. T
P [ T( T) 1 ]T
A AA A
I− −
=
=I−AT((AAT)−1)T A
=I−AT((AAT)T)−1A
3. Transformasi Linear Definisi 2.26 Transformasi
Misalkan V dan W dua ruang vektor. Transformasi atau pemetaan atau fungsi T dari V ke dalam W adalah aturan yang memasangkan setiap elemen x
di V dengan satu dan hanya satu elemen di W. Untuk selanjutnya, transformasi ini ditulis
W V T : →
Ruang vektor V disebut daerah asal T. Nilai transformasi T untuk elemen
V ∈
x ditulis T(x) yang merupakan elemen di W. Elemen T(x) disebut peta
dari x.
Definisi 2.27 Transformasi Linear
Misalkan V dan Wdua ruang vektor. Transformasi T :V →W disebut transfor-masi linear jika
a. Untuk sebarang vektor x1 dan x2 di V berlaku
) ( ) ( )
(x1 x2 T x1 T x2
T + = + (2.25)
b. Untuk sebarang bilangan real s dan vektor x di V berlaku )
( )
(sx sT x
C. Masalah Program Linear
1. Bentuk Standar Masalah Program Linear
Perumusan masalah program linear dibagi menjadi dua, yakni fungsi
sa-saran dan kendala-kendala.
Definisi 2.28 Fungsi sasaran
Fungsi sasaran dalam masalah program linear dapat dinyatakan sebagai
∑
=
= p
j j jx c f
1
(2.27)
dengan p merupakan bilangan bulat yang menyatakan banyaknya variabel, xj
merupakan variabel ke- j, dan cj∈ R merupakan koefisien ongkos dari variabel ke- j, dengan j=1,K,p
Kendala-kendala dibagi dua, yakni kendala utama dan kendala tak
nega-tif.
Definisi 2.29 Kendala utama
Kendala utama masalah program linear berbentuk
(
)
∑
=
≥ = ≤
p
j
i j
ijx b a
1
,
, , i=1,2,...,m; j =1,K,p (2.28)
Definisi 2.30 Kendala Tak Negatif Kendala tak negatif berbentuk
; 0 ≥
j
x j =1,2,...,p. (2.29)
Untuk mencari penyelesaian dari sistem (2.28), kendala utama yang
ber-bentuk pertidaksamaan diubah menjadi persamaan, dengan cara sebagai berikut:
a. Kendala yang berbentuk ,
1
∑
=
≤
p
j
i j ijx b
a pada ruas kiri disisipkan variabel
pengetat (slack variable) si sedemikian sehingga dipenuhi:
∑
=
= +
p
j
i i j
ijx s b a
1
dengan si ≥0, i =1,2,...,m; j=1,2,...,p
Dalam hal ini,
jika ;
1
∑
=
=
p
j
i j ijx b
a i=1,2,...,m; j=1,2,...,p maka si =0
dan jika ;
1
∑
=
<
p
j
i j ijx b
a i=1,2,...,m; j=1,2,...,p maka si >0
b. Kendala yang berbentuk ,
1
∑
=
≥
p
j
i j ijx b
a pada ruas kanan disisipkan variabel
surplus (surplus variable) ti sedemikian sehingga dipenuhi:
; 1
∑
=
+ =
p
j
i i j
ijx t b
a i =1,2,...,m; j =1,2,...,p
yang ekivalen dengan
∑
=
= −
p
j
i i j
ijx t b a
1
Dalam hal ini,
jika ;
1
∑
=
=
p
j
i j ijx b
a i=1,2,...,m; j=1,2,...,p maka ti =0
jika ;
1
∑
=
>
p
j
i j ijx b
a i=1,2,...,m; j=1,2,...,pmaka 0ti >
Dengan demikian kendala utama akan berubah menjadi sistem persamaan linear:
;
1
∑
=
= n
j
i j ijx b
a i=1,2,...,m; j=1,2,...,n (2.30)
yakni dengan memberi lambang variabel pengetat atau variabel surplus xj dimu-lai dari j = p+1 sampai j =n, dengan n adalah banyaknya variabel xj. Dan su-paya penyelesaian sistem (2.30) menjadi layak masih harus dipenuhi kendala tak
negatif
; 0 ≥
j
x j=1,2,...,n. (2.31)
Untuk menyesuaikan dengan bentuk kendala yang baru, fungsi sasaran
yang semula berbentuk
p p p
j j
jx cx c x c x c
f =
∑
= + + +=
... 2 2 1 1 1
(2.32)
dilengkapi menjadi
n n p
p p p n
j j
jx cx c x c x c x c x c
f = = + + + + + + + +
=
∑
1 1 2 2 ... 1 1 ...1
(2.33)
Dengan demikian, suatu masalah program linear dapat dinyatakan dalam bentuk
sebagai berikut:
Maksimumkan (atau minimumkan)
∑
=
= n j
j jx c f
1
(2.34)
dengan kendala
;
1
∑
=
= n
j
i j ijx b
a i=1,2,...,m ;j=1,2,...,n. (2.35)
; 0 ≥
j
x j =1,2,...,n. (2.36)
Bentuk di atas (dengan semua kendala utama berbentuk persamaan) disebut ben-tuk standar dari masalah program linear.
Bentuk di atas bila ditulis dalam notasi matriks adalah sebagai berikut
Maksimumkan (atau Minimumkan) f =cTx (2.37)
dengan kendala Ax{≤,≥,=}b (2.38)
0
x≥ (2.39)
dengan x=
( )
xj( )
aij=
A adalah koefisien matriks kendala
( )
bi=
b adalah vektor suku tetap
( )
cj=
Definisi 2.31 Penyelesaian Layak
Nilai-nilai variabel yang memenuhi kendala utama (2.38) dan kendala tak negatif
(2.39) disebut penyelesaian layak .
Pada umumnya sistem persamaan linear (2.38) mempunyai penyelesaian
takhingga banyak. Di antara penyelesaian-penyelesaian tersebut dicari juga yang
memenuhi (2.39), dan pada umumnya masih mempunyai penyelesaian takhingga
banyak. Kemudian di antara penyelesaian layak yang takhingga banyak ini dicari
yang mengoptimumkan fungsi sasaran, maka akan diperoleh penyelesaian
opti-mum.
Definisi 2.32 Penyelesaian Basis
Suatu vektor x merupakan penyelesaian basis, j