DAFTAR PUSTAKA
Datasheet.Arduino-A000066.pdf. Datasheet.servo.s3003.pdf. Datasheet.srf04tech.pdf.
Istiyanto, Jazi Eko. 2014. Pengantar Elektronika dan Instrumentasi Pendekatan Project Arduino dan Android. Yogyakarta: Andi.
Pitowarno, Endra. 2006. Desain Kontrol dan Kecerdasan Buatan. Yogyakarta: Andi.
Prawiroredjo, K. 2008. Detektor Jarak Dengan Sensor ultrasonik Berbasis Mikrokontroler. Jurnal Jetri. 7:41-52.
Republik Indonesia. 2009. Peraturan Pemerintah No. 72 Tahun 2009. Tentang Lalu Lintas dan Angkutan Kereta Api, Jakarta: Sekretariat Negara.
Saputra, H. A. 2008. Rancang Bangun Pengendalian Palang Pintu Kereta Api Berbasis PLC. Tugas Akhir. Universitas Negeri Semarang. Semarang.
Semboyan Kereta Api. Online at http://id.wikipedia.org/ wiki/Semboyan _kereta_api (diakses 12 April 2015).
Shofa, F. 2014. Penerapan Metode Simple Maze Pada Robot Wall Follower Untuk Menyelesaikan Jalur Dalam Menelusuri Sebuah Labirin. Skripsi. Universitas Negeri Semarang
BAB III
METODELOGI PENELITIAN
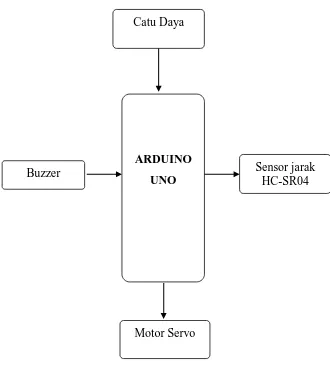
3.1 Diagram Blok Rangkaian
Gambar 3.1. Diagram Blok Sistem Kerja Rangkaian
Fungsi dari tiap blok :
1. Blok Sensor jarak : Sebagai input/data yang diukur
2. Blok Arduino Uno : Sebagai pengkonversi data dari sensor 3. Blok Display LCD 16x2 : Sebagai penampil hasil pengukuran 4. Blok Buzzer : Sebagai suara tanda
5. Blok Catu Daya : Sebagai sumber energi atau tegangan 6. Block Motor Servo : Sebagai palang pintu otomatis
ARDUINO UNO
Motor Servo Buzzer
Catu Daya
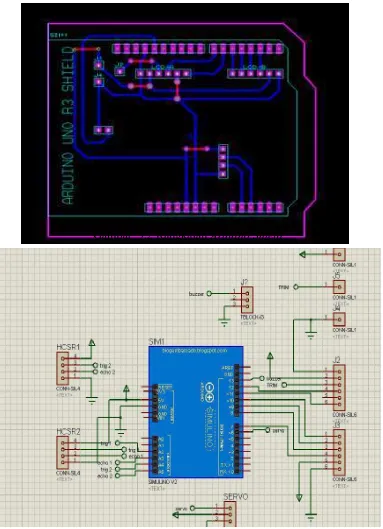
3.2 Rangkaian Arduino
Gambar 3.2 menunjukkan rangkaian Arduino. Rangkaian sistem minimum Arduino terdiri dari HCSR-04 sebagai sensor jarak, Arduino sebagai system microcontroller, Motor Servo sebagai alat gerak palang pintu kereta api, LCD sebagai tampilan hasi, dan Buzze sebagai suara tanda kedatangan kereta api.
Gambar 3.2 Rangkaian Arduino Shield
PIN FUNGSI
A4 TRIGGER
A5 ECHO
13 BUZZER
7,8,9,10,11,12 LCD
6 Servo
3.3 Rangkaian LCD
Pada gambar 3.4 LCD (Liquid Crystal Display) berfungsi sebagai penampil hasil pengukuran jarak yang diperoleh/dibaca oleh sensor HC-SR04 berupa karakter dan sebagai tampilan penunjukan selamat jalan kepada para pengendara ketika palang pintu kereta api sudah terbuka kembali. Dari gambar dibawah port yang dipakai untuk menghubungkan LCD dengan arduino adalah terletak pada pin 7,8,9,10,11, dan 12.
Program yang digunakan oleh arduino adalah program bahasa C, Bahasa C adalah bahasa pemrograman yang dapat dikatakan berada antara bahasa tingkat rendah (bahasa yang berorientasi pada mesin) dan bahasa tingkat tinggi (bahasa yang berorientasi pada manusia). Pada gambar 3.4 adalah tapilan program bahasa C pada arduino
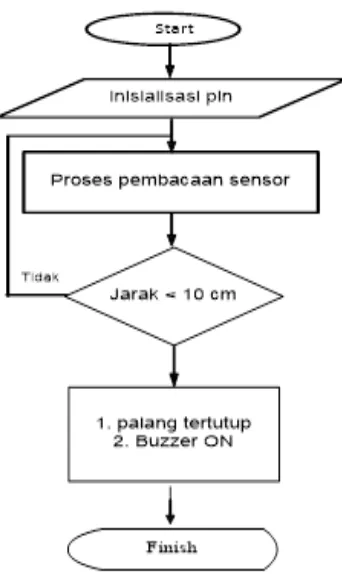
3.5Diagram Alir (Flowchart)
Gambar 3.6 Diagram Alir (Flowchart)
BAB IV
HASIL DAN PEMBAHASAN
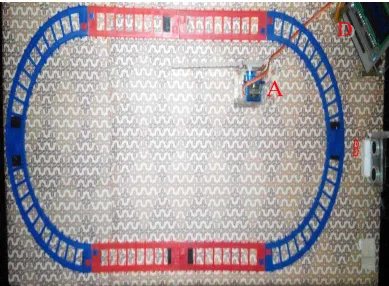
4.1Miniatur palang pintu KA Otomatis
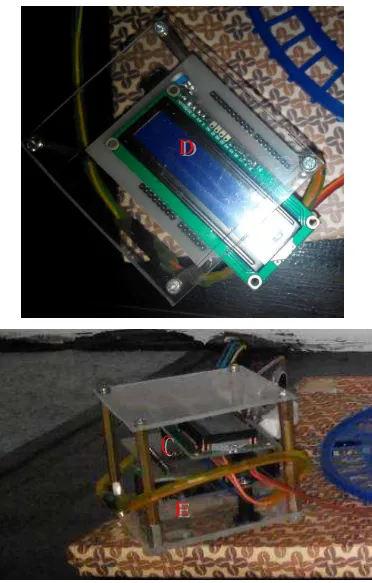
Penerapan metode R&D menghasilkan sebuah miniatur palang pintu kereta otomatis. Perangkat keras / hardware yang digunakan pada miniatur terdiri dari sensor, microcontroller ATmega328 / arduino uno, servo, buzzer dan lcd. Gambar miniatur palang KA dapat dilihat pada Gambar 4.1 dan Perangkat hardware tersebut dapat dilihat pada Gambar 4.2.
Keterangan Gambar :
A. Motor Servo : Sebagai alat untuk penggerak palang pintu
B. Sensor HC-SR04 : Sebagai sensor jarak untuk mengukur jarak ketika kereta api dating. Dengan jarak <10 cm
C. Buzzer : Sebagai tanda bunyi ketika kereta api lewat D. LCD : LCD 16 x 2 sebagai tampilan hasil akhir E. Ardunio Uno : Sebagai pengkonversi data dari sensor
Miniatur yang telah dibuat seperti gambar 4.1. dirancang untuk dapat mengendalikan palang pintu kereta secara otomatis atau manual. Sistem pada miniatur ini di program ketika keretamelewati sensor dan membaca jarak sensor dengan kereta, ketika sensor membaca kedatangan kereta dan membaca jaraknya
maka buzzer akan membunyikan suara yang merupakan sebagai tanda bahwa palang pintu akan terbuka dengan motor servo sebagai alat penggerak palang
pintu. Ketika kereta sudah melawati pembatas palang pintu kereta maka tidak lama kemudian palang pintu akan terbuka kembali dan LCD akan menampilkan selamat jalan. Dengan kecepatan kereta yang tidak tetap/berubah sesuai dengan daya yang dimili baterai pada kereta sehingga data yang diperoleh tidak sama karena sesuai dengan kecepatan kereta.
4.2Hasil Pengujian Pengukuran
Pengujian pengukuran dilakukan terhadap beberapa sampel, dimana hasil pengukuran yang terbaca berupa perubahan nilai tegangan. Nilai tegangan yang terbaca akan dikonversikan menjadi logika 0/1 dan logika ini akan di hitung menggunakan pencacah yg terdapat pada arduino, kemudian nilai tersebut akan dikonversikan menjadi satuan jarak dalam satuan centimeter. Pengujian ini dilakukan di :
Tempat : Gedung Pusdiklat LPPM USU Medan Tanggal : 19 Juli 2016
Waktu / Pukul : 10.00 – 11.00 WIB
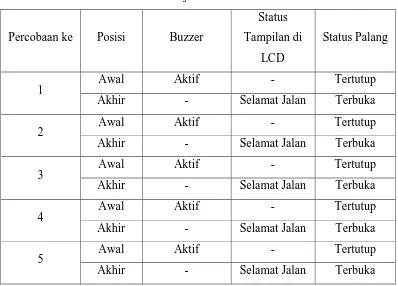
4.2.1 Hasil Uji Miniatur Secara Keseluruhan
Kinerja sistem secara keseluruhan diuji dengan melewatkan kereta api mainan pada sistem yang telah dibuat. Untuk itu dibutuhkan kereta api mainan yang dapat bergerak dengan sumber energi baterai serta lintasan berupa rel kereta mainan. Pengujian dilakukan sebanyak 5 kali secara berurutan dengan laju kereta tidak tetap/berubah dan searah sehingga data yang diperoleh berubah-ubah sesuai dengan kecepatan kereta. Tabel 4.1 menunjukkan hasil kinerja sistem ketika kereta terdeteksi pada sensor.
Tabel 4.1. Uji Sistem Miniatur
Percobaan ke Posisi Buzzer
Status
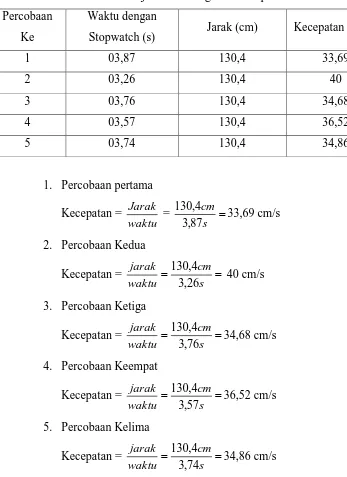
4.2.2 Hasil Uji Pengukuran Kecepatan
Tabel 4.2. Hasil Uji Sistem Pengukur Kecepatan Kereta
Percobaan Ke
Waktu dengan
Stopwatch (s) Jarak (cm) Kecepatan (cm/s)
1 03,87 130,4 33,69
Dengan hasil rata rata kecepatan kereta adalah sebagai berikut :
Rata-rata =
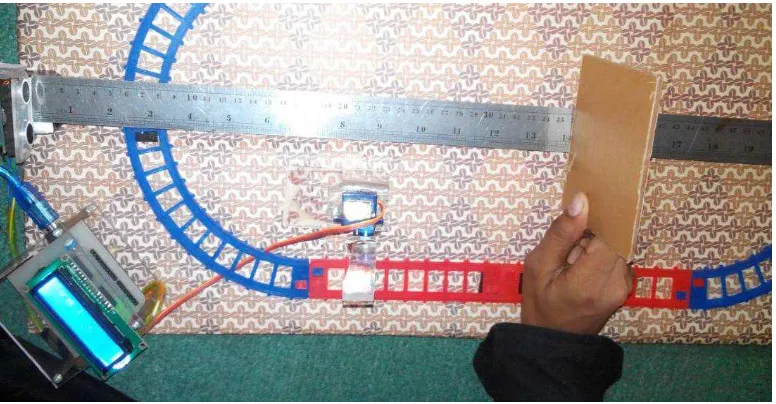
4.2.3 Pengukuran HC-SR04
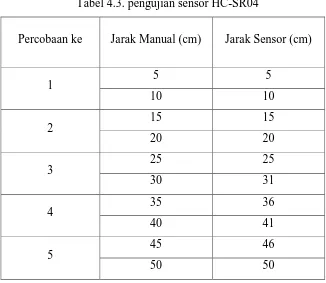
Sensor ultrasonic adalah sensor utama yang digunakan pada miniatur palang pintu kereta otomatis. Sensor ini berperan sebagai indra pendeteksi bagi miniatur. Pengujian terhadap sensor dilakukan untuk mengetahui tingkat ketelitian dan keakuratan dari sensor tersebut. Pengujian sensor ini dilakukan dengan menampilkan data pembacaan sensor pada LCD dan pembacaan jarak sebenarnya dengan menggunakan mistar (alat ukur panjang dengan ketelitian terkecil 1 mm), pengujian dilakukan pada rentang jarak 1-50 cm. Papan plastic/akrilik dengan ukuran 22 cm x 17 cm digunakan sebagai penghalang sensor. Pengukuran sensor secara manual dan hasil pengukuran dapat dilihat pada Gambar 4.3 dan Tabel 4.3.
Gambar 4.4. Pengukuran Sensor Secara Manual
Tabel 4.3. pengujian sensor HC-SR04
Percobaan ke Jarak Manual (cm) Jarak Sensor (cm)
1 5 5
10 10
2 15 15
20 20
3 25 25
30 31
4 35 36
40 41
5 45 46
BAB V
KESIMPULAN DAN SARAN
5.1Kesimpulan
Perancangan miniatur palang pintu kereta api otomatis menggunakan arduino, sensor srf-04, servo, lcd 1602 dan rangkaian buzzer. Sensor digunakan untuk mendeteksi posisi kereta, pada miniatur yang telah di buat menggunakan sensor srf-04. Fungsi sensor adalah pendeteksi kedatangan kereta, mengaktifkan sistem penghitung jarak dan pendeteksi bahwa kereta api akan melewati palang pintu. Palang pintu pada miniatur digerakkan oleh motor DC servo. LCD pada miniatur dapat berfungsi dengan baik yaitu mampu menampilkan jarak kereta
serta tampilan selamat jalan bagi pengguna jalan. Pada miniatur yang telah di buat juga dilengkapi dengan kontrol manual, sehingga saat terjadi kegagalan sistem
otomatis palang pintu dapat di operasikan secara manual. Hasil uji unjuk kerja miniatur seluruh komponen pendukung dapat berfungsi secara optimal yaitu rangkaian catu daya dapat memberi supply tegangan kesemua komponen dengan stabil, sensor srf-04 dapat berfungsi dan akurat dalam mendeteksi posisi kereta dan servo yang bergerak sesuai dengan program sistem miniatur. Kereta dapat berjalan dengan baik namun kereta memiliki kecepatan yang tidak tetap/berubah sehingga kecepatan kereta dapat mempengaruhi hasil pengujian.
5.2Saran
BAB II
TINJAUAN PUSTAKA
2.1Sensor
Pengertian Sensor adalah transduser yang berfungsi untuk mengolah variasi gerak, panas, cahaya atau sinar, magnetis, dan kimia menjadi tegangan serta arus listrik. Sensor sendiri adalah komponen penting pada berbagai peralatan. Sensor juga berfungsi sebagai alat untuk mendeteksi dan juga untuk mengetahui magnitude. Transduser sendiri memiliki arti mengubah, resapan dari bahasa latin traducere Bentuk perubahan yang dimaksud adalah kemampuan merubah suatu energi kedalam bentuk energi lain. Energi yang diolah bertujuan
untuk menunjang daripada kinerja piranti yang menggunakan sensor itu sendiri. Sensor sendiri sering digunakan dalam proses pendeteksi untuk proses
pengukuran. Sensor yang sering menjadi digunakan dalam berbagai rangkaian elektronik antara lain sensor cahaya atau sinar, sensor suhu, serta sensor tekanan.
Dari pengertian sensor yang telah saya jabarkan diatas wajar jika alat tersebut menjadi alat yang banyak diminati oleh berbagai pabrikan elektronik. Salah satu pabrikan yang tengah gencar menggunakan sensor pada produk mereka adalah pabrikan handphone dengan model touch screen. Sensor tekanan pada berbagai handphone sekarang ini membutuhkan adanya dukungan dari sensor tekanan. Selain pada gadget dengan teknologi canggih tersebut, sensor tekanan juga biasa diaplikasikan kepada berbagai alat elektronik lain seperti kalkulator serta remot. Adanya tekanan pada tombol-tombol pada kalkulator ataupun remot bekerja dengan mengubah daya tekan tersebut menjadi daya atau sinyal listrik.
Dengan pengertian sensor beserta kinerja dari sensor tekanan diatas dapat diambil kesimpulan bahwa sensor memiliki banyak andil pada berbagai teknologi. Pada sensor suhu sendiri terdapat empat jenis sensor yang sering dipakai yaitu thermocouple, resistansi temperature detectore, IC sensor dan termistor. Pada
stabilitas, kelinearan, reproduktifitas, serta stabilitas. Termistor merupakan resistor yang tahan terhadap panas, serta IC sensor sensor suhu dengan rangkaian yang menggunakan chipsilikon guna mendeteksi tingkat suhu yang terdapat pada objek.
2.2Sensor HCSR-04
Sensor ultrasonik adalah sebuah sensor yang berfungsi untuk mengubah besaran fisis (bunyi) menjadi besaran listrik dan sebaliknya. Cara kerja sensor ini didasarkan pada prinsip dari pantulan suatu gelombang suara sehingga dapat dipakai untuk menafsirkan eksistensi (jarak) suatu benda dengan frekuensi tertentu. Disebut sebagai sensor ultrasonik karena sensor ini menggunakan
gelombang ultrasonik (bunyi ultrasonik).
Sensor ini merupakan sensor ultrasonik siap pakai, satu alat yang berfungsi
sebagai pengirim, penerima, dan pengontrol gelombang ultrasonik. Alat ini bisa digunakan untuk mengukur jarak benda dari 2 cm – 4 m dengan akurasi 3 mm. Alat ini memiliki 4 pin, pin Vcc, Gnd, Trigger, dan Echo. Pin Vcc untuk listrik positif dan Gnd untuk ground-nya. Pin Trigger untuk trigger keluarnya sinyal dari sensor dan pin Echo untuk menangkap sinyal pantul dari benda.
Gelombang ultrasonik adalah gelombang bunyi yang mempunyai frekuensi sangat tinggi yaitu 20.000 Hz. Bunyi ultrasonik tidak dapat di dengar oleh telinga manusia. Bunyi ultrasonik dapat didengar oleh anjing, kucing, kelelawar, dan lumba-lumba. Bunyi ultrasonik nisa merambat melalui zat padat, cair dan gas. Reflektivitas bunyi ultrasonik di permukaan zat padat
Hampir sama dengan reflektivitas bunyi ultrasonik di permukaan zat cair. Akan tetapi, gelombang bunyi ultrasonik akan diserap oleh tekstil dan busa. Cara Kerja Sensor Ultrasonik
Cara menggunakan alat ini yaitu: ketika kita memberikan tegangan positif pada pin Trigger selama 10 uS, maka sensor akan mengirimkan 8 step sinyal ultrasonik dengan frekuensi 40 kHz. Selanjutnya, sinyal akan diterima pada pin Echo. Untuk mengukur jarak benda yang memantulkan sinyal tersebut, maka selisih waktu ketika mengirim dan menerima sinyal digunakan untuk menentukan jarak benda tersebut.
Berikut adalah visualisasi dari sinyal yang dikirimkan oleh sensor HC-SR04
Gambar 2.2. Sistem Pewaktu Pada Sensor HC-SR04
Pada sensor ultrasonik, gelombang ultrasonik dibangkitkan melalui sebuah alat yang disebut dengan piezoelektrik dengan frekuensi tertentu. Piezoelektrik ini akan menghasilkan gelombang ultrasonik (umumnya berfrekuensi 40 kHz) ketika sebuah osilator diterapkan pada benda tersebut. Secara umum, alat ini akan menembakkan gelombang ultrasonik menuju suatu area atau suatu target. Setelah gelombang menyentuh permukaan target, maka target akan memantulkan kembali gelombang tersebut.
Gambar cara kerja sensor ultrasonik dengan transmitter dan receiver (atas), sensor ultrasonik dengan single sensor yang berfungsi sebagai transmitter dan receiver sealigus
Oleh transmitter dan waktu ketika gelombang pantul diterima receiver.
Gambar 2.3. Sistem Kerja Sensor HC-SR04
2.2.1Prinsip Kerja Sensor HC-SR04
Secara detail, cara kerja sensor ultrasonik adalah sebagai berikut:
Sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi tertentu dan dengan durasi waktu tertentu. Sinyal tersebut berfrekuensi diatas 20
kHz. Untuk mengukur jarak benda (sensor jarak), frekuensi yang umum digunakan adalah 40 kHz.
Setelah gelombang pantulan sampai di alat penerima, maka sinyal tersebut akan diproses untuk menghitung jarak benda tersebut. Jarak benda dihitung berdasarkan rumus :
S = 340.t/2
Dimana S merupakan jarak antara sensor ultrasonik dengan benda (bidang pantul), dan t adalah selisih antara waktu pemancaran gelombang
2.3Motor Servo
Motor servo adalah sebuah motor DC dengan sistem umpan balik tertutup
dimana posisi rotor-nya akan diinformasikan kembali ke rangkaian yang ada di dalam motor servo. Motor servo biasanya digunakan untuk robot berkaki, lengan robot atau sebagai aktuator pada mobil robot. Motor servo terdiri dari sebuah motor DC, beberapa gear, sebuah potensiometer, sebuah output shaft dan sebuah rangkaian kontrol elektronik. Ada 2 jenis motor servo yaitu :
1. Motor servo standard
Yaitu motor servo yang mampu bergerak CW dan CCW dengan sudut operasi tertentu, misalnya 600, 900 atau 1800
2. Motor servo continuous
Yaitu motor yang mampu bergerak CW dan CCW tanpa batasan sudut operasi (berputar secara continue)
Motor servo adalah motor yang mampu bekerja dua arah (CW dan CCW) dimana arah dan sudut pergerakan rotornya dapat dikendalikan dengan memberikan variasi lebar pulsa (duty cycle) sinyal PWM pada bagian pin kontrolnya.
Pada saat Ton duty cycle dari sinyal yang diberikan kurang dari 1.5 ms, maka rotor akan berputar ke berlawanan arah jarum jam (Counter Clock wise = CCW) dengan membentuk sudut yang besarnya linier terhadap besarnya Ton duty cycle, dan akan bertahan diposisi tersebut. Dan sebaliknya, jika Ton duty cycle
dari sinyal yang diberikan lebih dari 1.5 ms, maka rotor berputar searah jarum jam (Clock Wise = CW) dengan membentuk sudut yang linier pula terhadap besarnya Ton duty cycle, dan bertahan diposisi tersebut.
Gambar 2.5. Motor Servo Keunggulan dari penggunaan motor servo adalah: 1. Tidak bergetar dan tidak ber-resonansi saat beroperasi.
2. Daya yang dihasilkan sebanding dengan ukuran dan berat motor. 3. Penggunaan arus listik sebanding dengan beban yang diberikan.
4. Resolusi dan akurasi dapat diubah dengan hanya mengganti encoder yang dipakai.
5. Tidak berisik saat beroperasi dengan kecepatan tinggi.
2.4Arduino Uno
2.4.1 Pengertian Arduino
Uno Arduino adalah board berbasis mikrokontroler pada ATmega328. Board ini memiliki 14 digital input / output pin (dimana 6 pin dapat digunakan
sebagai output PWM), 6 input analog, 16 MHz osilator kristal, koneksi USB, jack listrik tombol reset. Pin-pin ini berisi semua yang diperlukan untuk mendukung mikrokontroler, hanya terhubung ke komputer dengan kabel USB atau sumber tegangan bisa didapat dari adaptor AC-DC atau baterai untuk menggunakannya. Board Arduino Uno memiliki fitur-fitur baru sebagai berikut :
1,0 pinout: tambah SDA dan SCL pin yang dekat ke pin aref dan dua pin baru lainnya ditempatkan dekat ke pin RESET, dengan IO REF yang memungkinkan sebagai buffer untuk beradaptasi dengan tegangan yang disediakan dari board sistem. Pengembangannya, sistem akan lebih kompatibel dengan Prosesor yang menggunakan AVR, yang beroperasi dengan 5 V dan dengan Arduino Karena yang beroperasi dengan 3.3V. Circuit Reset
Gambar 2.7. Kabel USB Board Arduino UNO
Tabel 2.1. Deskripsi Arduino UNO
2.4.2 Catu Daya
Uno Arduino dapat diaktifkan melalui koneksi USB atau dengan catu daya eksternal. Sumber listrik dipilih secara otomatis. Eksternal (non-USB) daya dapat datang baik dari AC-DC adaptor atau baterai. Adaptor ini dapat dihubungkan dengan cara menghubungkannya plug pusat-positif 2.1 mm ke dalam board colokan listrik. Lead dari baterai dapat dimasukkan ke dalam header pin Gnd dan Vin dari konektor Power.
Pin catu daya adalah sebagai berikut :
5V. Catu daya diatur digunakan untuk daya mikrokontroler dan komponen lainnya di board. Hal ini dapat terjadi baik dari VIN melalui regulator on-board, atau diberikan oleh USB.
3,3 volt pasokan yang dihasilkan oleh regulator on-board. Menarik arus maksimum adalah 50 mA.
GND
2.4.3 Memory
ATmega328 ini memiliki 32 KB dengan 0,5 KB digunakan untuk loading file. Ia juga memiliki 2 KB dari SRAM dan 1 KB dari EEPROM
2.4.4 Input dan Output
Masing-masing dari 14 pin digital pada Uno dapat digunakan sebagai
input atau output, menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead(). Mereka beroperasi di 5 volt. Setiap pin dapat memberikan atau
menerima maksimum 40 mA dan memiliki resistor pull-up internal dari 20-50 K Ω. Selain itu, beberapa pin memiliki fungsi khusus :
Serial: 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan mengirimkan (TX) data TTL serial. Pin ini terhubung ke pin yang sesuai dari chip ATmega8U2 USB-to-Serial TTL.
Eksternal Interupsi: 2 dan 3. Pin ini dapat dikonfigurasi untuk memicu interupsi pada nilai yang rendah, tepi naik atau jatuh, atau perubahan nilai.
Lihat attachInterrupt () fungsi untuk rincian.
PWM: 3, 5, 6, 9, 10, dan 11. Menyediakan 8-bit output PWM dengan analogWrite () fungsi.
SPI: 10 (SS), 11 (mosi), 12 (MISO), 13 (SCK). Pin ini mendukung komunikasi SPI menggunakan perpustakaan SPI.
LED: 13. Ada built-in LED terhubung ke pin digital 13. Ketika pin adalah nilai TINGGI, LED menyala, ketika pin adalah RENDAH, itu off.
TWI: A4 atau SDA pin dan A5 atau SCL pin. Mendukung komunikasi TWI Aref. Referensi tegangan untuk input analog. Digunakan dengan
analogReference (). Reset.
Lihat juga pemetaan antara pin Arduino dan ATmega328 port. Pemetaan untuk ATmega8, 168 dan 328 adalah identik.
2.4.5 Komunikasi
Uno Arduino memiliki sejumlah fasilitas untuk berkomunikasi dengan komputer, Arduino lain, atau mikrokontroler lain. ATmega328 ini menyediakan UART TTL (5V) komunikasi serial, yang tersedia pada pin digital 0 (RX) dan 1 (TX). Sebuah ATmega16U2 pada saluran board ini komunikasi serial melalui USB dan muncul sebagai com port virtual untuk perangkat lunak pada komputer.
Firmware Arduino menggunakan USB driver standar COM, dan tidak ada driver
eksternal yang dibutuhkan. Namun, pada Windows, file. Inf diperlukan. Perangkat
lunak Arduino termasuk monitor serial yang memungkinkan data sederhana yang akan dikirim ke board Arduino. RX dan TX LED di board akan berkedip ketika data sedang dikirim melalui chip USB-to-serial dan koneksi USB ke komputer. ATmega328 ini juga mendukung komunikasi I2C (TWI) dan SPI. Fungsi ini digunakan untuk melakukan komunikasi inteface pada sistem
2.4.6 Programming
Uno Arduino dapat diprogram dengan perangkat lunak Arduino. Pilih Arduino Uno dari Tool lalu sesuaikan dengan mikrokontroler yang digunakan. Para ATmega328 pada Uno Arduino memiliki bootloader yang memungkinkan Anda untuk meng-upload program baru untuk itu tanpa menggunakan programmer hardware eksternal. Ini berkomunikasi menggunakan protokol dari bahas C.
Gambar 2.8. Tampilan Framework Arduino
2.4.7 Perangkat Lunak (Arduino IDE)
Lingkungan open-source Arduino memudahkan untuk menulis kode dan meng-upload ke board Arduino. Ini berjalan pada Windows, Mac OS X, dan Linux. Berdasarkan Pengolahan, avr-gcc, dan perangkat lunak sumber terbuka lainnya.
2.5Bahasa C
Bahasa C adalah bahasa pemrograman yang dapat dikatakan berada antara bahasa tingkat rendah (bahasa yang berorientasi pada mesin) dan bahasa tingkat tinggi (bahasa yang berorientasi pada manusia). Seperti yang diketahui, bahasa tingkat tinggi mempunyai kompatibilitas antara platform. Karena itu, amat mudah untuk membuat program pada berbagai mesin. Berbeda halnya dengan menggunakan bahasa mesin, sebab setiap perintahnya sangat bergantung pada jenis mesin.
dalam bentuk blok. Tujuannya untuk memudahkan dalam pembuatan dan pengembangan program. Program yang ditulis dengan bahasa C mudah sekali dipindahkan dari satu jenis program ke bahasa program lain. Hal ini karena adanya standarisasi bahasa C yaitu berupa standar ANSI (American National Standar Institut) yang dijadikan acuan oleh para pembuat kompiler.jenis mesin. Pembuat bahasa C adalah Brian W. Kernighan dan Dennis M. Ritchie pada tahun 1972. C adalah bahasa pemrograman terstruktur, yang membagi program dalam bentuk blok. Tujuannya untuk memudahkan dalam pembuatan dan pengembangan program.
Program yang ditulis dengan bahasa C mudah sekali dipindahkan dari satu jenis program ke bahasa program lain. Hal ini karena adanya standarisasi bahasa
C yaitu berupa standar ANSI ( American National Standar Institut) yang dijadikan acuan oleh para pembuat kompiler.
Kelebihan Bahasa C:
Bahasa C tersedia hampir di semua jenis computer.
Kode bahasa C sifatnya adalah portable dan fleksibel untuk semua jenis computer.
Bahasa C hanya menyediakan sedikit kata-kata kunci. hanya terdapat 32 kata kunci.
Proses executable program bahasa C lebih cepat Dukungan pustaka yang banyak.
C adalah bahasa yang terstruktur
Bahasa C termasuk bahasa tingkat menengah
Penempatan ini hanya menegaskan bahwa c bukan bahasa pemrograman yang berorientasi pada mesin. yang merupakan ciri bahasa tingkat rendah. melainkan berorientasi pada obyek tetapi dapat dinterprestasikan oleh mesin dengan cepat. secepat bahasa mesin. inilah salah satu kelebihan c yaitu memiliki kemudahan dalam menyusun programnya semudah bahasa tingkat tinggi namun dalam mengesekusi program secepat bahasa tingkat rendah.
Kekurangan Bahasa C:
Bagi pemula pada umumnya akan kesulitan menggunakan pointer. Banyaknya kode kode didalam program.
Bagi pemula terkadang sulit dimengerti diawal pembelajaran
2.6LCD (Liquid Crystal Display)
LCD (Liquid Crystal Display) adalah modul penampil yang banyak
digunakan karena tampilannya menarik. LCD yang paling banyak digunakan saat ini ialah LCD M1632 Refurbish karena harganya cukup murah. LCD M1632 merupakan modul LCD dengan tampilan 2x16 (2 baris x 16 kolom) dengan konsumsi daya rendah. Modul tersebut dilengkapi dengan mikrokontroler yang didesain khusus untuk mengendalikan LCD.
Gambar 2.9. Bentuk Fisik LCD 16x2
LCD ini digunakan untuk menampilkan nilai data dari sensor LM35,
sensor gas MQ-6 dan informasi lain bisa ditampilkan di LCD ini. Banyak sekali kegunaan LCD dalam perancangan suatu system yang menggunakan mikrokontroler. LCD berfungsi menampilkan suatu nilai hasil sensor, menampilkan teks, atau menampilkan menu pada aplikasi mikrokontroler. LCD yang digunakan adalah jenis LCD M1632. LCD M1632 merupakan modul LCD dengan tampilan 16 x 2 baris dengan konsumsi daya rendah. Modul tersebut
dilengkapi dengan mikrokontroler yang didesain khusus untuk mengendalikan LCD.
2.6.1 Cara kerja LCD
sebuah parallel bus, dalam hal ini sangat memudahkan dan sangat cepat dalam pembacaan dan penulisan data dari atau ke LCD. Kode ASCII yang ditampilkan sepanjang 8bit dikirim ke LCD secara 4bit atau 8bit pada satu waktu
Jika mode 4bit yang digunakan, maka 2 nibble data dikirim untuk membuat sepenuhnya 8bit (pertama dikirim 4bit MSB lalu 4bit LSB dengan pulsa clock EN setiap nibblenya). Jalur control EN digunakan untuk memberitahu LCD bahwa mikrokontroler mengirimkan data ke LCD. Untuk mengirim data ke LCD program harus menset EN ke kondisi high “1” dan kemudian menset dua jalur control lainnya (RS dan R/W) atau juga mengirimkan data ke jalur data bus.
Saat jalur lainnya sudah siap, EN harus diset ke “0” dan tunggu beberapa saat, dan set EN kembali ke high “1”. Ketika jalur RS berada dalam kondisi low “0”, data yang dikirimkan ke LCD dianggap sebagai sebuah perintah atau kondisi high “1”, maka program akan melakukan query data dari LCD.
Instruksi pembacaan hanya satu, yaitu Get LCD status, lainnya merupakan instruksi penulisan, Jadi hamper setiap aplikasi yang menggunakan LCD, R/W selalu di set ke “0”. Jalur data dapat terdiri 4 atau 8 jalur.Mengirimkan data secara parallel baik 4bit atau 8bit merupakan 2 mode operasi primer. Untuk membuat sebuah aplikasi interface LCD, menentukan mode operasi merupakan hal yang paling penting.
2.7Buzzer
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk
mengubah getaran listrik menjadi getaran suara, contoh komponen buzzer dapat di lihat pada Gambar 2.10. Pada dasarnya prinsip kerja buzzer hampir sama dengan loud speaker, buzzer juga terdiri dari kumparan yang terpasang pada diafragma
dan kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara. Buzzer biasa digunakan sebagai indikator bahwa proses telah selesai atau terjadi suatu kesalahan pada
sebuah alat (alarm).
BAB I PENDAHULUAN
1.1Latar Belakang
Pintu perlintasan kereta api merupakan salah satu dari rangkaian teknologi yang terdapat dalam sistem perkereta apian. Perlintasan kereta api di bagi dalam dua macam, yaitu perlintasan sebidang dan perlintasan tidak sebidang. Perlintasan sebidang yang diartikan sebagai elevasi jalan rel dan jalan raya ada pada satu bidang. Perlintasan tidak sebidang yang di artikan sebagai elevasi jalan rel dan jalan raya tidak berada pada satu bidang (Peraturan Direktur Jendral Perhubungan Darat SK.770/KA.401/DRJD/2005). Perlintasan sebidang ada yang berpintu dan
ada yang tanpa pintu. Berdasarkan data yang dimiliki oleh PT. Kereta Api Indonesia Kanwil Sumut pada tahun 2015 yang disajikan pada Tabel 1.1.
Tabel 1.1. Rincian perlintasan sebidang di Umatera Utara Tahun 2015
No Daop Perlintasan Sebidang
Dijaga Tidak dijaga Liar Total
1 Sumut 335 150 119 604
Kecelakaan kereta api merupakan salah satu peristiwa transportasi yang sering terjadi di Indonesia. Salah satu permasalahan yang mengemuka adalah persoalan pintu perlintasan kereta api. Kecelakaan yang sering terjadi di sekitar pintu perlintasan kereta api di sebabkan kelalaian petugas penjaga pintu atau sikap dari para pengemudi yang tidak disiplin. Berikut merupakan beberapa kejadian kecelakaan kereta di perlintasan :
langsung mengerem, tapi angkot itu sudah terlanjur maju hingga ditabrak kereta api”, kata Ilham seorang warga.
2. Pasangan suami istri, Nazuan Arfan (54) dan Adnine Delina (49) warga jalan Panglima Denai tewas mengenaskan Minggu (29/5/2016). Kecelakaan maut itu terjadi di perlintasan kereta api tanpa palang pintu di pasar sore, Desa Aras Kabu, Kecamatan Beringin, Deliserdang.
3. Pasca insiden angkot Nasional trayek 38 BK ditabrak kereta api dijalan sisingamangaraja, kecamatan Medan Kota, Rabu (25/11) sore, ternyata palang pintu perlintasan kereta api sering mengalami kerusakan. Tambunan menyebutkan, sebelum insiden tabrakan tersebut terjadi, kondisi palang pintu perlintasan kereta api sering mengalami kerusakan.
Seperti, sering terjadi keterlambatan tertutup, dan juga bunyi sirine kadang juga tidak berfungsi.
Banyak jalur lintasan kereta api yang dibangun di Indonesia, sehingga banyak pula dibangun portal atau palang pintu kereta api. Sejak beberapa tahun terakhir ini, portal kereta api menjadi salah satu penyebab terjadinya kecelakaan lalu lintas. Hal ini dikarenakan masih minimnya sarana keamanan pada semua portal kereta api sehingga membuat para pengguna jalan masih melanggar peraturan lalu lintas. Banyak pengendalian buka tutup pada portal kereta api di Indonesia masih dilakukan secara manual dengan bantuan seorang operator.
Kecelakaan pada jalur kereta api diakibatkan oleh tidak terawatnya palang pintu perlintasan kereta api dan bahkan telah hancur. Sering kali berita menyiarkan kecelakaan kereta api terjadi di perlintasan kereta api karena tidak adanya pengawasan palang pintu perlintasan kereta api, kelalaian seorang operator dan juga kesalahan pengendara dengan menerobos palang pintu kereta api. Ini disebabkan oleh kurang perhatian dalam pengoperasian ataupun kekurangan personil. Dengan menggunakan komponen elektronik sederhana dapat mengotomatisasi kendali gerbang kereta api. Kereta api yang mendekati persimpangan, sensor dipasang pada jarak tertentu dari palang pintu
Berdasarkan uraian diatas maka alat ini penulis kembangkan melalui tahapan penelitian yang diberi judul “Rancang Bangun Palang Pintu Perlintasa
1.2 Rumusan Masalah
Berdasarkan permasalalahan yang telah diuraikan di atas sesuai dengan latar belakang bahwa kecelakaan pada pengaman palang pintu perlintasan kereta api masih sering terjadi, oleh sebab itu perlu di rancang sistem pengaman yang lebih baik untuk mengurangi jumlah kecelakaan pada perlintasan palang pintu kereta api. Penelitian tentang palang kereta otomatis sebelumnya sudah pernah dilakukan namun masih memiliki kekurangan sehingga penulis membuat miniatur palang pintu kereta otomatis menggunakan arduino sebagai sistem kontrolnya.
1.3 Batasan Masalah
Pembatasan masalah dalam penelitian ini dimaksudkan untuk
mempersempit ruang lingkup permasalahan yang akan dikaji lebih lanjut. Pembatasan masalah tersebut antara lain:
1. Pembuatan miniatur palang pintu kereta api otomatis menggunakan arduino uno.
2. Sensor ultrasonic yang digunakan adalah SRF-04.
3. Waktu hitung kedatangan kereta api adalah waktu prakiraan.
4. Pada miniatur ini digunakan satu Palang pintu yang di gerakkan dengan servo 1800.
5. Sistem pada miniatur ini di desain untuk satu jalur dan satu arah kereta api. 6. Rancang bangun sistem ini dapat digunakan dengan miniatur yang telah
disesuaikan.
1.4 Tujuan Penulisan
Tugas Akhir ini memiliki beberapa tujuan. Adapun tujuan dalam pembuatan Tugas Akhir ini adalah :
1. Merancang dan menguji sistem otomatisasi palang pintu perlintasan kereta api berbasis Arduino Uno dengan menggunakan bahasa C.
2. Membuat purwarupa palang pintu perlintasan kereta api
1.5 Metodologi Pembahasan
Untuk dapat mengimplementasikan sistem di atas, maka secara garis besar digunakan beberapa metode sebagai berikut:
1. Studi Literatur, dengan cara mempelajari buku-buku acuan dan literatur yang berhubungan dengan materi dalam penulisan projek. Pengumpulan data, yaitu mengumpulkan informasi dan mempelajari tentang sistem cara kerja alat dan penggunaan Arduino, Sensor, LCD, Motor Servo dan komponen pendukung lainnya.
2. Analisa permasalahan, untuk mengetahui dan menentukan batasan-batasan sistem sehingga dapat menentukan cara yang paling efektif dalam penyelesaian permasalahan.
3. Perancangan alat, setelah menganalisa permasalahan, selanjutnya dilakukan pengumpulan data dan perancangan alat dengan menggunakan
model perancangan alat yang telah ditetapkan.
4. Implementasi alat, membuat alat berdasarkan rancangan alat yang telah dibuat sesuai dengan data yang ada.
5. Uji coba alat, menguji alat yang telah dibuat, untuk mengetahui apakah alat sudah bekerja sesuai dengan prosedur, serta melacak kesalahan dan memperbaikinya.
1.6 Sistematika Penulisan
Dalam penyusunan Laporan Projek Akhir 2 ini, pembahasan mengenai system alat yang dibuat dibagi menjadi lima bab dengan sistematika sebagai berikut
BAB I : PENDAHULUAN
Berisi latar belakang permasalahan, batasan masalah, tujuan penulisan, metodologi pembahasan, sistematika penulisan dan relevansi dari penulisan laporan ini
BAB II : TINJAUAN PUSTAKA
BAB III : PERANCANGAN SISTEM
Membahas tentang perencanaan dan pembuatan system secara keseluruhan
BAB IV : ANALISIS DAN PENGUJIAN
Membahas tentang uji coba alat yang telah dibuat, pengoperasian dan spesifikasi alat dan lain-lain
BAB V : KESIMPULAN DAN SARAN
Sebagai bab terakhir penulis akan menguraikan beberapa kesimpulan dari uraian bab-bab sebelumnya, dan penulis akan berusaha memberikan saran yang mungkin bermanfaat.
DAFTAR PUSTAKA
RANCANG BANGUN PALANG PINTU PERLINTASAN KERETA APIOTOMATIS BERBASIS MIKROKONTROLER
ARDUINO UNO
ABSTRAK
Telah dibuat rancang bangun pada pintu perlintasan kereta api otomatis, perancangan pada pembuatan miniatur ini dimulai dari pembuatan rangkaian catu daya, rangkaian alarm, rangkaian kontrol manual dan membuat komunikasi sensor
srf-04, servo, alarm dan LCD dengan arduino. Ujicoba miniatur dilakukan dalam dua tahapan yaitu uji fungsional dan uji unjuk kerja miniatur. Uji fungsional
meliputi uji sistem secara keseluruhan dan uji sistem pengukur kecepatan. Uji unjuk kerja miniatur meliputi uji sensor HCSR-04
Hasil dari penelitian ini berupa miniatur palang pintu kereta otomatis dengan menampilkan jarak kereta menggunakan arduino. Berdasarkan hasil uji coba miniatur dapat bekerja dengan baik. Pintu dapat menutup secara otomatis dan sistem dapat mengukur jarak kereta, serta pada keadaan darurat palang pintu dapat dioperasikan secara manual.
DESIGN CROSSBAR AUTOMATIC DOOR RAILROAD CROSSINGS MICROCONTROLLER ARDUINO UNO
ABSTRACT
Has made design the automatic train crossings, the design of the miniature-making starts from the manufacture of power supply circuit, alarm circuit, the control circuit manual and make communication srf-04 sensor, servo, alarm and LCD with arduino. Miniature trials carried out in two phases, namely
the test functional and performance test miniature. Functional testing include tests and test the overall system speed measuring system. Performance test
miniaturized sensors include tests HCSR-04
The results of this study in the form of miniature trains latch automatically displays the distance trains using arduino. Based on trial results miniature can work well. The door can close automatically and the system can measure the distance of the train, as well as in emergencies doorstop can be operated manually.
ARDUINO UNO
PROJEK AKHIR II
IFFATUL JANNAH
NIM : 132411014
PROGRAM STUDI D-3 METROLOGI DAN INSTRUMENTASI
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
ARDUINO UNO
PROJEK AKHIR II
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh Ahli Madya
IFFATUL JANNAH
NIM : 132411014
PROGRAM STUDI D-3 METROLOGI DAN INSTRUMENTASI
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
PERSETUJUAN
Judul : RANCANG BANGUN PALANG PINTU
PERLINTASAN KERETA API OTOMATIS BERBASIS MIKROKONTROLER ARDUINO UNO
Kategori : TUGAS AKHIR II
Nama : IFFATUL JANNAH
NIM : 132411014
Program Studi : D-3 METROLOGI DAN INSTRUMENTASI Departemen : FISIKA
Fakultas : FISIKA MATEMATIKA DAN ILMU PENGETAHUAN
ALAM (MIPA) UNIVERSITAS SUMATERA UTARA
Disetujui di Medan, Juli 2016
Komisi Pembimbing :
Diketahui/Disetujui oleh
Program Studi D3 Metrologi dan Instrumentasi Pembimbing, Ketua,
PERNYATAAN
RANCANG BANGUN PALANG PINTU PERLINTASAN KERETA APIOTOMATIS BERBASIS MIKROKONTROLER
ARDUINO UNO
TUGAS AKHIR II
Saya mengakui bahwa laporan ini adalah hasil kerja saya sendiri. Kecuali beberapa kutipan dan ringkasan yang masing- masing di sebutkan sumbernya.
Medan, Juli 2016
PENGHARGAAN
Alhamdulillah puji dan syukur penulis ucapkan kepada Allah Subhanahuwata’ala, atas segala karuniaNya yang telah diberikan kepada penulis sehingga dapat menyelesaikan TugasAkhir 2 ini dengan baik. Shalawat dan Salam kepada Nabi Muhammad SAW semoga kita mendapatkan safa’atnya di kemudian hari. Aamiin
Dalam kesempatan ini penulis menyampaikan rasa hormat dan ucapan terima kasih yang sebesar- besarnya kepada keluarga tercinta Ayahanda Taharauman SE. dan Ibunda Wida Novia SE, terimah kasih kepada teman teman yang telah membantu selesainya Tugas akhir 2 ini. Pada kesempatan ini penulis mengucapkan terima kasih banyak kepada :
1. Yth. Bapak Dekan Dr. Kerista Sebayang beserta jajarannya di lingkungan FMIPA USU
2. Bapak Dr. Marhaposan Situmorang, selaku Ketua Program Studi Fisika S1 Fakultas Matematika Dan Ilmu Pengetahuan Alam .
3. Ibu Dr. Diana Alemin Barus, Msc selaku Ketua Program Studi D-3 Metrologi dan Instrumentasi.
4. Bapak Syahrul Humaidi, M.Sc selaku dosen pembimbing penulis dalam penyelesaian Tugas Akhir 2 ini. Penulis sangat berterima kasih untuk setiap bimbingan, masukan , saran bahkan waktu yang senantiasa diberikan kepada penulis sampai pada akhir penyelesaiannya.
5. Seluruh Dosen dan Karyawan Program Studi D-3 Metrologi Dan Instrumentasi Departemen Fisika FMIPA USU
6. Kepada saudara-saudara seperguruan UKM Robotik SIKONEK USU, Teman–teman seperjuangan yang telah banyak membantu dalam proses pengerjaan Projek akhir 2 penulis ini Juliana, Puja , Novi, Mida, Eka, dan Dolly terkhusus untuk Juliani.
Instrumentasi yang telah memberikan motivasi dan doa agar terselesainya Projek Akhir 2 ini
dan kepada semua pihak yang telah berkontribusi dalam kehidupan penulis yang tidak mampu saya tuliskan satu persatu. Jazakumullah khairan katsiran Penulis menyadari sepenuhnya bahwa dalam pembuatan Projek Akhir 2 penulis ini ini masih jauh dari kesempurnaan, untuk itu penulis mengharapkan kritik dan saran dari pembaca yang bersifat membangun dalam penyempurnaan Projek Akhir 2 penulis ini.
Semoga laporan Projek Akhir 2penulis ini menjadi ibadah yang baik bagi penulis dan menjadi ilmu yang bermanfaat bagi pembaca.
RANCANG BANGUN PALANG PINTU PERLINTASAN KERETA APIOTOMATIS BERBASIS MIKROKONTROLER
ARDUINO UNO
ABSTRAK
Telah dibuat rancang bangun pada pintu perlintasan kereta api otomatis, perancangan pada pembuatan miniatur ini dimulai dari pembuatan rangkaian catu daya, rangkaian alarm, rangkaian kontrol manual dan membuat komunikasi sensor
srf-04, servo, alarm dan LCD dengan arduino. Ujicoba miniatur dilakukan dalam dua tahapan yaitu uji fungsional dan uji unjuk kerja miniatur. Uji fungsional
meliputi uji sistem secara keseluruhan dan uji sistem pengukur kecepatan. Uji unjuk kerja miniatur meliputi uji sensor HCSR-04
Hasil dari penelitian ini berupa miniatur palang pintu kereta otomatis dengan menampilkan jarak kereta menggunakan arduino. Berdasarkan hasil uji coba miniatur dapat bekerja dengan baik. Pintu dapat menutup secara otomatis dan sistem dapat mengukur jarak kereta, serta pada keadaan darurat palang pintu dapat dioperasikan secara manual.
DESIGN CROSSBAR AUTOMATIC DOOR RAILROAD CROSSINGS MICROCONTROLLER ARDUINO UNO
ABSTRACT
Has made design the automatic train crossings, the design of the miniature-making starts from the manufacture of power supply circuit, alarm circuit, the control circuit manual and make communication srf-04 sensor, servo, alarm and LCD with arduino. Miniature trials carried out in two phases, namely
the test functional and performance test miniature. Functional testing include tests and test the overall system speed measuring system. Performance test
miniaturized sensors include tests HCSR-04
The results of this study in the form of miniature trains latch automatically displays the distance trains using arduino. Based on trial results miniature can work well. The door can close automatically and the system can measure the distance of the train, as well as in emergencies doorstop can be operated manually.
DAFTAR ISI
2.2.1. Prinsip Kerja Sensor HCSR-04 ... 9
2.4.6. Programming ... 15
2.4.7. PerangkatLunak ... 16
2.5.Bahasa C... 16
2.6. LCD (Liquid Crystal Display) ... 18
2.6.1. Cara Kerja LCD ... 18
2.7. Buzzer ... 20
BAB III METODELOGI PENELITIAN 3.1. Diagram Blok Rangkaian ... 21
3.2. Rangkaian Arduino ... 22
3.3. Rangkaian LCD ... 23
3.4. Program ... 24
3.5. Diagram Alir (Flowchart) ... 25
BAB IV HASIL DAN PEMBAHASAN 4.1.Miniatur palang pintu KA Otomatis ... 26
4.2.HasilPengujianPengukuran ... 28
4.2.1.Hasil Uji Miniatur Secara Keseluruhan ... 29
4.2.2.HasilUjiPengukuranKecepatan ... 29
4.2.3. Pengukuran HC-SR04 ... 31
DAFTAR GAMBAR
Gambar 2.1 Sensor HCSR-04 ... 7
Gambar 2.2 Sistem Pewaktu Pada Sensor HCSR-04 ... 8
Gambar 2.3 Sistem Kerja Sensor HCSR-04 ... 9
Gambar 2.4Lebar Pulsa Motor Servo... 10
Gambar 2.5 Motor Servo... 11
Gambar 2.6 Board Arduino UNO ... 12
Gambar 2.7 Kabel USB Board Arduino UNO ... 13
Gambar 2.8. Tampilan Framework Arduino... 16
Gambar 2.9.Bentuk Fisik LCD 16x2... 18
Gambar 2.10. Buzzer ... 20
Gambar 3.1. Diagram Blok SistemKerjaRangkaian ... 21
Gambar 3.2Rangkaian Arduino Shield ... 22
Gambar 3.3. RangkainArduino ... 22
Gambar 3.4. Rangkaian LCD ... 23
Gambar 3.5. PemogramanBahasa C... 24
Gambar 3.6 Diagram Alir(Flowchart) ... 25
Gambar 4.1. Miniatur palang kereta otomatis ... 26
Gambar 4.2. Perangkat hardware ... 27
DAFTAR TABEL
Tabel 1.1.Rincian perlintasan sebidang di Umatera Utara Tahun 2015 ... 1
Tabel 2.1. Deskripsi Arduino UNO ... 13
Tabel 3.1. Spesifikasi PIN/Bandar yang Digunakan ... 23
Tabel 4.1. UjiSistemMiniatur ... 29
Tabel 4.2. Hasil Uji Sistem Pengukur KecepatanKereta ... 30