PENERAPAN SLEEP MODE PADA MONITORING
SUHU DAN KELEMBABAN TANAMAN JARAK
DENGAN SISTEM JARINGAN SENSOR NIRKABEL
TUGAS AKHIR
Program Studi S1 Sistem Komputer
Oleh:
RIFANDY SYAHRIL RAMADHAN 10.41020.0032
FAKULTAS TEKNOLOGI DAN INFORMATIKA
1 1.1 Latar Belakang Masalah
Pengembangan energi alternatif semakin mendesak untuk dilakukan. Alasannya adalah makin meningkatnya harga minyak bumi di pasaran dunia dan subsidi bahan bakar minyak yang secara perlahan mulai dilepas oleh pemerintah, akibatnya harga minyak menjadi mahal. Oleh karena itu, diperlukan perealisasian penggunaan energi terbarukan biodiesel untuk mengganti BBM. Biodiesel merupakan bahan bakar alternatif yang berasal dari minyak nabati sehingga ramah lingkungan dan tidak beracun. Tumbuhan yang bisa digunakan sebagai bahan baku biodiesel salah satunya adalah jarak pagar. Untuk mendapatkan kandungan minyak yang besar pada tanaman jarak maka harus diperhatikan suhu dan kelembaban air disekelilingnya. Selama ini proses
monitoring suhu dan kelembaban tanah dilakukan secara manual. Untuk memudahkan para petani dalam melakukan monitoring suhu dan kelembaban tanah disekitar perkebunan jarak yang begitu luasnya, maka diperlukannya suatu
alat yang dapat menginformasikan keadaan tersebut secara terus menerus (real
time) yaitu Wireless sensor network. Dengan begitu para petani tidak perlu
berkeliling mengecek satu persatu lokasi lahan tanaman jarak.
awalnya digunakan oleh pihak militer sebagai aplikasi untuk keperluan pengawasan (Arduino, 2011).
Pada perkembangan teknologi node sensor, konsumsi daya merupakan salah satu hal penting untuk diteliti. Hal ini dikarenakan pada penerapan WSN, node
sensor akan diletakan tersebar di sebuah lingkungan yang jauh dari pusat pemantau dan diharapkan dapat aktif dalam waktu yang lama. Pengolahan konsumsi daya dapat dilakukan dengan mengatur waktu pengiriman data dan menggunakan fitur sleep mode pada mikrokontroler. Pada penelitian ini merupakan sebuah pengembangan dari penelitian yang telah dilakukan sebelumnya yaitu “Rancang bangun WSN untuk monitoring suhu dan kelembaban pada lahan tanaman jarak” (Wisnu Prambudi, K., Jusak, & Susanto, P. 2014) dan penelitian “Rancang Bangun Aplikasi dan Gateway Wireless Sensor Network
untuk Pemantauan Lahan Tanaman Jarak” (Nofianto, R. H., Jusak, & Susanto, P. 2014). Dari kedua penelitian tersebut dikembangkan bagaimana merancang sistem
monitoring berbasis WSN yang dapat menghemat daya. sehingga menambah masa waktu pakai.
1.2 Perumusan Masalah
Berdasarkan latar belakang di atas, dapat dirumuskan permasalahan yaitu bagaimana marancang bangun jaringan WSN yang dapat menghemat daya setiap
1.3 Pembatasan Masalah
Dalam merancang penerapan sleep mode pada bangun WSN untuk
monitoring tanaman jarak, terdapat beberapa pembatasan masalah, antara lain: 1. Terdapat satu perangkat node sensor untuk mengukur suhu dan
kelembaban tanah.
2. Pada Tugas Akhir ini fokus pada sistem sleep mode. 3. Waktu pengambilan data ditentukan oleh user.
4. Kondisi awal node sensor sudah pada kondisi sleep mode.
5. Pada setiap node menggunakan baterai lippo 3 sel 12 Volt 1000 mAH. 6. Pengukuran teganga, arus, dan daya di lakukan secara manual.
1.4 Tujuan
Tujuan pembuatan tugas akhir ini adalah pengaturan waktu kirim dan pnerapan sleep mode pada rancang dan bangun Wireless Sensor Network (WSN) sebagai perangkat pendukung sensor node untuk mengefsiensikan daya.
1.5 Kontribusi
Untuk monitoring suhu dan kelembaban tanaman jarak tidak harus dilakukan secara continue, namun juga dapat dilakukan secara berkala dan terus
update secara real time. Agar daya tidak terbuang sia-sia maka pada setiap node
1.6 Sistematika Penulisan
Laporan Tugas Akhir ini ditulis dengan sistematika penulisan sebagai berikut:
BAB I : PENDAHULUAN
Bab ini membahas tentang latar belakang, perumusan masalah, pembatasan masalah, tujuan penulisan laporan Tugas Akhir.
BAB II : LANDASAN TEORI
Bab ini membahas berbagai macam tentang teori yang mendukung Tugas Akhir ini, hal tesebut meliputi: Wireless sensor network
(WSN), Mikrokontroler, Xbee, Soil Moisture Sensor, DHT11
Temperature and Humidity Sensor, Zigbee, X-CTU dan CodeVisionAVR.
BAB III : METODE PENELITIAN
Bab ini membahas tentang blok diagram sistem, dimulai dari proses pembacaan sensor sampai dengan data yang akan dikirimkan dari
node sensor ke router user yang meliputi koneksi perangkat keras dengan perangkat lunak dan konfigurasi xbee untuk peranan masing-masing.
BAB IV : PENGUJIAN DAN EVALUASI
BAB V : PENUTUP
6 2.1 Jarak Pagar (Jatropha curca L.)
Salah satu sumber minyak nabati yang sangat prospektif untuk dimanfaatkan sebagai bahan baku biodiesel adalah tanaman jarak. Beberapa jenis tanaman jarak yang tercatat di Indonesia diantaranya adalah jarak kaliki/kastor (Ricinus communis), jarak pagar (Jatropha curcas), jarak gurita (Jatropha multifida), dan jarak landi (Jatropha gossypifolia), tetapi untuk jenis tanaman jarak yang paling menghasilkan kandungan minyak terbanyak adalah jenis jarak pagar (Jatropha Curcas L.) karena untuk jenis tanaman ini berbuah terus menerus (tahunan).
Minyak jarak pagar tidak termasuk dalam kategori minyak makan (edible oil), sehingga pemanfaatannya sebagai biodiesel tidak akan menganggu penyediaan kebutuhan minyak makan nasional. Biji (dengan cangkang) jarak pagar mengandung 20-40% minyak nabati, namun bagian inti biji (biji tanpa
Gambar 2.1 Tanaman Jarak Pagar.
2.2 Wireless Sensor Network (WSN)
WSN adalah suatu infrastruktur jaringan wireless yang menggunakan sensor untuk memantau kondisi fisik atau kondisi lingkungan yang dapat terhubung ke jaringan. Masing–masing node dalam jaringan sensor nirkabel biasanya dilengkapi dengan radio tranciever atau alat komunikasi wireless
lainnya, mikrokontroler, dan sumber energi, biasanya baterai.
Berdasarkan fakta di dunia, sekitar 98% prosesor bukan berada didalam sebuah komputer, namun terintegrasi dalam aplikasi militer, kesehatan, remote control, chip robotik, alat komunikasi dan mesin-mesin industri yang didalamnya telah dipasang sensor.
yang dilakukan di lapangan melibatkan banyak faktor dan parameter – parameter untuk mendapatkan hasil yang maksimal dan akurat. Jika peneliti hendak mengambil informasi langsung di lapangan, maka kendalanya adalah dibutuhkan biaya yang besar dan waktu yang lama untuk mendeteksi fenomena yang muncul sehingga menyebabkan performansi yang tidak efisien dan tidak praktis.
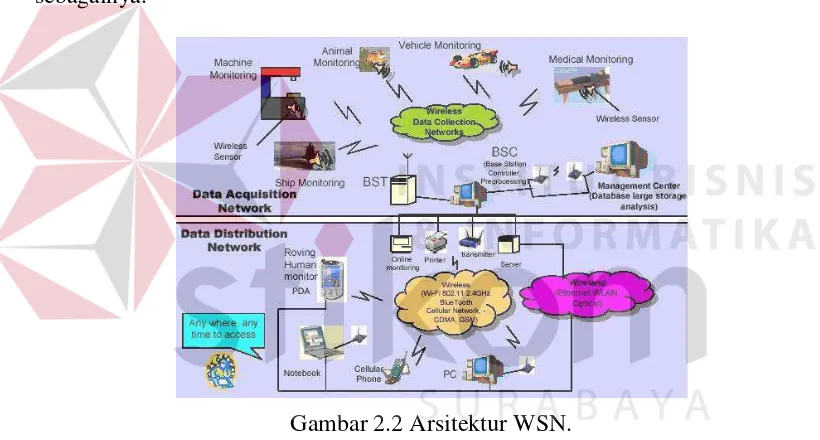
Dengan adanya teknologi WSN, memungkinkan peneliti untuk mendapat informasi yang maksimal tanpa harus berada di area sensor. Informasi dapat diakses dari jarak jauh melalui gadget seperti laptop, remote control, server dan sebagainya.
Gambar 2.2 Arsitektur WSN.
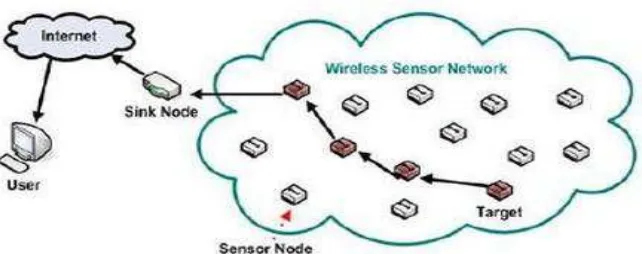
2.2.1 Arsitektur WSN
Pada WSN, node sensor disebar dengan tujuan untuk menangkap adanya gejala atau fenomena yang hendak diteliti. Jumlah node yang disebar dapat ditentukan sesuai kebutuhan dan tergantung beberapa faktor misalnya luas area, kemampuan sensing node dan sebagainya. Tiap node memiliki kemampuan untuk mengumpulkan data dan meroutingkannya kembali ke Base Station. Node sensor dapat mengumpulkan data dalam jumlah yang besar dari gejala yang timbul dari lingkungan sekitar.
Perkembangan node sensor mengikuti trend teknologi nano, dimana ukuran
node sensor menjadi semakin kecil dari tahun ke tahun. Node sensor dapat direpresentasikan dalam Gambar 2.3 berikut:
Gambar 2.3 Perkembangan Dimensi Node Sensor Terhadap Waktu. Dan untuk arsitektur WSN secara umum dapat direpresentasikan dalam Gambar 2.4 sebagai berikut:
Pada Gambar 2.4 dapat dilihat, node sensor yang berukuran kecil disebar dalam di suatu area sensor. Node sensor tersebut memiliki kemampuan untuk merutekan data yang dikumpulkan ke node lain yang berdekatan. Data dikirimkan melalui transmisi radio akan diteruskan menuju BS (Base Station) yang merupakan penghubung antara node sensor dan user. Informasi tersebut dapat diakses melalui berbagai platform seperti koneksi internet atau satelit sehingga memungkinkan user untuk dapat mengakses secara realtime melalui remote server (Rolis, 2012).
2.3 Perangkat Keras 2.3.1 Mikrokontroler AVR
Mikrokontroler adalah sebuah computer kecil (“special purpose computers”) di dalam satu IC yang berisi CPU, memori, timer, saluran komunikasi serial dan paralel, port input/output, ADC. Mikrokontroler digunakan untuk suatu tugas dan menjalankan suatu program.
Pada saat ini penggunaan mikrokontroler dapat kita temui pada berbagai peralatan, misalnya peralatan yang terdapat di rumah, seperti telepon digital,
Salah satu mikrokontroler yang banyak digunakan saa ini yaitu mikrokontroler AVR.
AVR adalah mikrokontroler RISC (Reduce Instruction Set Compute) 8 bit berdasrkan arsitektur Harvard, yang dibuat oleh Atmel pada tahun 1996. AVR mempunyai kepanjangan Advanced Versatile RISC atau Alf and Vegard’s Risc
processor yang berasal darinama dua mahasiswa Norwegian Institute of Technology (NTH), yaitu Alf-Egil Bogen dan Vegard Wollan.
AVR memiliki keunggulan dibandingkan dengan mikrokontroler lain, keunggulan mikrokontroler AVR yaitu AVR memiliki kecepatan eksekusi program yang lebih cepat karena sebagian besar intruksi dieksekusi dalam 1 situs
clock, lebih cepat dibandingkan dengan mikrokontroler MCS51 yang memiliki arsitektur CISC (Complex Instruction Set Computer) di mana mikrokontroler MCS51 membutuhkan 12 siklus clock untuk mengeksekusi 1 intruksi. Selain itu mikrokontroler AVR memiliki fitur yang lengkap (ADC Internal, EEPROM Internal, Timer/Counter, Watchdog Timer, PWM, Port I/O, Komunikasi serial, Komparator, I2C, dan lain-lain. ), sehingga dengan fasilitas yang lengkap ini,
programmer dan desainer dapat menggunakannya untuk berbagai aplikasi system elektronika seperti robot, otomasi industri, peralatan telekomunikasi, dan berbagai keperluan lain.
pemrograman keseluruhan mikrokontroler jenis AVR, namun bahasab assembler relatif lebih sulit dipelajari daripada bahasa C, untuk pembuatan suatu proyek yang besar memakan waktu yang lama, serta penulisan programnya akan panjang. Sedangkan bahasa C memiliki keunggulan dibandingkan bahasa assembler yaitu
independent terhadap hardware serta lebih mudah untuk menangani project yang besar. Bahasa C memiliki keuntungan-keuntungan yang dipunyai oleh bahasa mesin (asembly), hampir semua oprasi yang dapat dilakukan oleh bahasa mesin, dapat dilakukan oleh bahasa C dengan penyusunan program yang lebih sederhana dan mudah. Bahasa C sendriri sebenarnya terletak diantara bahasa pemrograman tingkat tinggi di assembly (Adrianto, 2012).
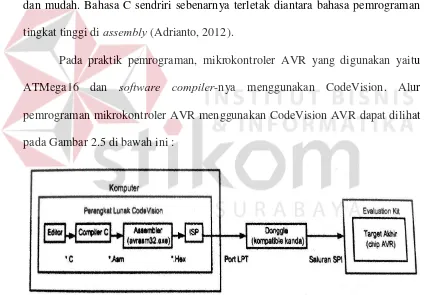
Pada praktik pemrograman, mikrokontroler AVR yang digunakan yaitu ATMega16 dan software compiler-nya menggunakan CodeVision. Alur pemrograman mikrokontroler AVR menggunakan CodeVision AVR dapat dilihat pada Gambar 2.5 di bawah ini :
Gambar 2.5 Alur Program Code Vision
Fitur-fitur yang dimiliki ATMega16 sebagai berikut :
1. Mikrokontroler AVR 8 bit yang memiliki kemampuan tinggi, dengan daya rendah.
3. Memiliki kapasitas Flash memori 16 KByte, EEPROM 512 Byte dan SRAM 1 KByte.
4. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, dan Port D. 5. CPU yang terdiri atas 32 buah regiser.
6. Unit interupsi internal dan eksternal 7. Port USART untuk komunikasi serial. 8. Fitur Peripheral
a. Tiga buah Timer atau Counter dengan kemampuan pembandingan.
- 2 (dua) buah Timer atau Conuter 8 bit dengan Prescalar terpisah dan mode Compare
- 1 (satu) buah Timer atau Counter 16 bit dengan Prescaler terpisah, Mode
Compare, dan Mode Capture
b. Real Time Counter dengan Oscilaltor tersendiri c. 4 channel PWM
d. 8 channel 10-bit ADC - 8 Singel-ended Channel
- 7 Differential Channel hanya pada kemasan TQFP
- 2 Differntial Channel dengan Progammable Gain 1X, 10X, atau 200X e. Byte-oriented Two-wire Serial Interface
f. Programmable Serial USART g. Antarmuka SPI
h. WATCHdog Timer dengan Oscillator internal
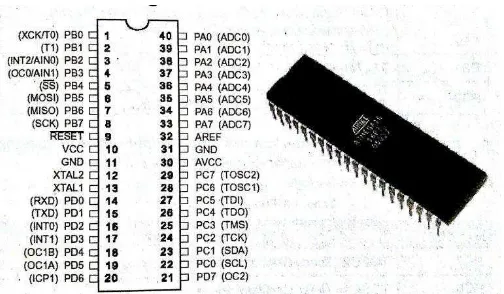
Gambar 2.6 Konfigurasi pin Atmega16
Konfigurasi pin ATMEGA16 dengan kemasan 40 pin DIP (Dual In Lane Package) dapat dilihat pada Gambar 2.6. dapat dijelaskan fungsi dari masing-masing pin ATMEGA16 sebagai berikut :
1. VCC merupakan pin yang berfungsi sebagai masukan catu daya. 2. GND merupakan pin Gorund
3. Port A(PA0…PA7) merupakan pin input/output dua arah dan pin masukan ADC
4. Port B(PB0…PB7) merupakan pin input/output dua arah dan pin khusus, seperti dapat dilihat pada Tabel 2.1 di bawah ini.
Tabel 2.1 Konfigurasi Port B Mikrokontroller
Pin Fungsi Khusus
PB7 SCK (SPI Bus Serial Clock)
PB6 MISO (SPI Bus Master Input/Slave Output) PB5 MOSI (SPI Bus Master Output/Slave Input) PB4 SS (SPI Slave Select Input)
PB3 AIN1 (Analog Comparator Negative Input)
OC0 (Timer/Counter0 Output Compare Match Output) PB2 AIN0 (Analog Comparator Positive Input)
INT2 (External Interrupt 2 input)
PB1 T1 (Timer/Counter1 External Counter Input) PB0 T0 T1 (Timer/Counter0 External Counter Input)
5. Port C(PC0…PC7) Merupakan pin input/output dua arah dan pin fungsi khusus, seperti dapat dilihat pada Tabel 2.2 di bawah.
Tabel 2.2 Konfigurasi Port C Mikrokontroller
Pin Fungsi Khusus
PC7 TOSC2 (Timer Oscillator Pin2) PC6 TOSC1 (Timer Oscillator Pin1) PC5 TDI (JTAG Test Data In) PC4 TDO (JTAG Test Data Out) PC3 TMS (JTAG Test Mode Select) PC2 TCK (JTAG Test Clock)
PC1 SDA (Two- Wire Serial Bus Data Input/Output Line) PC0 SCL (Two-Wire Serial Bus Clock LIne)
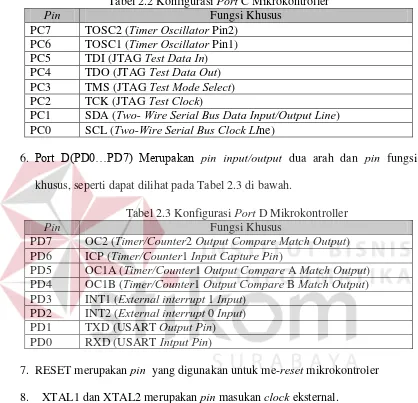
6. Port D(PD0…PD7) Merupakan pin input/output dua arah dan pin fungsi khusus, seperti dapat dilihat pada Tabel 2.3 di bawah.
Tabel 2.3 Konfigurasi Port D Mikrokontroller
Pin Fungsi Khusus
PD7 OC2 (Timer/Counter2 Output Compare Match Output) PD6 ICP (Timer/Counter1 Input Capture Pin)
7. RESET merupakan pin yang digunakan untuk me-reset mikrokontroler 8. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
9. AVCC merupakan pin masukan tegangan untuk ADC. 10. AREFF merupakan pin masukan tegangan referensi ADC.
2.3.2 Xbee
Xbee merupakan perangkat yang menunjang komunikasi data tanpa kabel (wireless). Ada 2 jenis xbee yaitu :
Xbee series 1 hanya dapat digunakan untuk komunikasi point to point dan
topologi star dengan jangkauan 30 meter indoor dan 100 meter outdoor. 2. Xbee ZB Series 2
Xbeeseries 2 dapat digunakan untuk komunikasi point to point, point to multipoint dan topologi star, dan topologi mesh dengan jangkauan 40 meter indoor dan 100 meter outdoor.
Xbeeseries 1 maupun series 2 tersedia dalam 2 bentuk berdasarkan kekuatan transmisinya yaitu xbeereguler dan xbee-pro. Xbeereguler biasa disebut dengan xbee saja (Robosoccer, 2012). Xbee-PRO mempunyai kekuatan transmisi lebih kuat, ukuran perangkatnya lebih besar, dan harganya lebih mahal.
Xbee-PRO mempunyai jangkauan indoor mencapai 60 meter dan outdoor
mencapai 1500 meter. Xbee ini dapat digunakan sebagai pengganti serial atau USB atau dapat memasukkannya ke dalam command mode dan mengkonfigurasinya untuk berbagai macam jaringan broadcast dan mesh. Shield
membagi setiap pin Xbee. Xbee juga menyediakan header pin female untuk penggunaan pin digital 2 sampai 7 dan input analog, yang discover oleh shield
(pin digital 8 sampai 13 tidak tercover oleh shield, sehingga dapat menggunakan
header pada papan itu sendiri (Arduino, 2011).
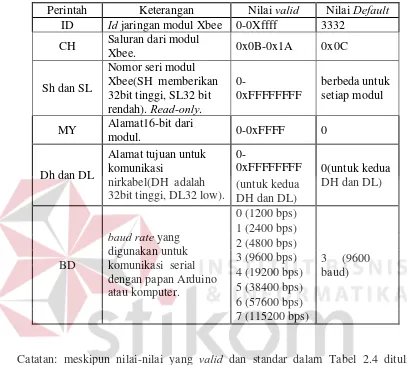
Berikut parameter untuk mengkonfigurasi modul Xbee S2 dengan mode AT. Tabel 2.4 Parameter Xbee
Perintah Keterangan Nilai valid Nilai Default
ID Id jaringan modul Xbee 0-0Xffff 3332 dengan awalan "0x" (untuk menunjukkan bahwa mereka adalah nomor heksadesimal), modul tidak akan mencakup "0x" ketika melaporkan nilai parameter, dan harus menghilangkan ketika menetapkan nilai-nilai (Arduino, 2011).
2.3.3 Soil moisture sensor (SEN0114)
kelembaban. Semakin banyak air membuat tanah lebih mudah menghantarkan listrik (resistansi kecil), sedangkan tanah yang kering sangat sulit menghantarkan listrik (resistansi besar).
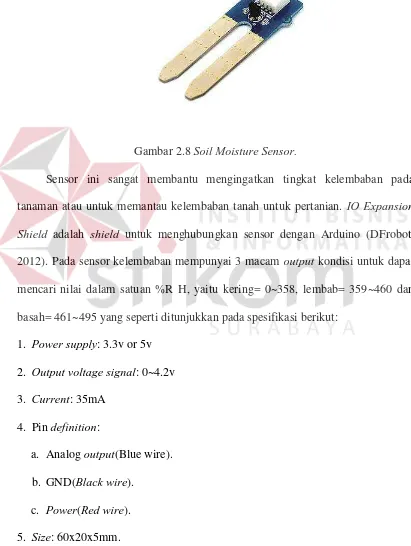
Gambar 2.8 Soil Moisture Sensor.
Sensor ini sangat membantu mengingatkan tingkat kelembaban pada tanaman atau untuk memantau kelembaban tanah untuk pertanian. IO Expansion Shield adalah shield untuk menghubungkan sensor dengan Arduino (DFrobot, 2012). Pada sensor kelembaban mempunyai 3 macam output kondisiuntuk dapat mencari nilai dalam satuan %R H, yaitu kering= 0~358, lembab= 359~460 dan basah= 461~495 yang seperti ditunjukkan pada spesifikasi berikut:
1. Powersupply: 3.3v or 5v 2. Outputvoltagesignal: 0~4.2v 3. Current: 35mA
4. Pin definition:
a. Analog output(Blue wire). b. GND(Blackwire).
a. Value range: 0~358 : drysoil
b. 359~460 : humidsoil
c. 461~495 : inwater
2.3.4 DHT11 Temperature and humidity sensor (DFR0067)
DHT11 adalah sensor suhu dan kelembaban, dia memiliki output sinyal digital yang dikalibrasi dengan sensor suhu dan kelembaban yang kompleks. Teknologi ini memastikan keandalan tinggi dan sangat baik stabilitasnya dalam jangka panjang. Mikrokontroler terhubung pada kinerja tinggi sebesar 8 bit. Sensor ini termasuk elemen resistif dan perangkat pengukur suhu NTC. Memiliki kualitas yang sangat baik, respon cepat, kemampuan anti-gangguan dan keuntungan biaya tinggi kinerja.
Setiap sensor DHT11 memiliki fitur kalibrasi sangat akurat dari kelembaban ruang kalibrasi. Koefisien kalibrasi yang disimpan dalam memori program OTP, sensor internal mendeteksi sinyal dalam proses, kita harus menyebutnya koefisien kalibrasi. Sistem antarmuka tunggal-kabel serial terintegrasi untuk menjadi cepat dan mudah. Kecil ukuran, daya rendah, sinyal transmisi jarak hingga 20 Meter, sehingga berbagai aplikasi dan bahkan aplikasi yang paling menuntut.
Sensor ini memiliki 4 pin baris paket tunggal (DFrobot, 2010). Sensor ini memiliki spesifikasi sebagai berikut:
1. Powersupply: 5 V.
2. Rentang temperatur :0-50 ° C kesalahan ± 2 ° C. 3. Kelembaban :20-90% RH
4. Toleransi ± 5% RH error. 5. Interface: Digital.
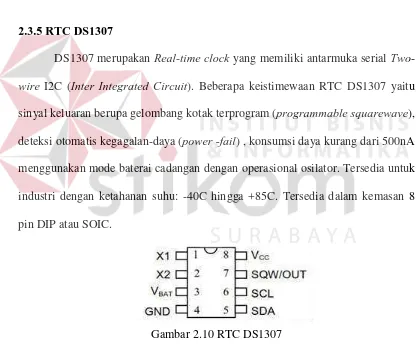
2.3.5 RTC DS1307
DS1307 merupakan Real-time clock yang memiliki antarmuka serial
Two-wire I2C (Inter Integrated Circuit). Beberapa keistimewaan RTC DS1307 yaitu sinyal keluaran berupa gelombang kotak terprogram (programmable squarewave), deteksi otomatis kegagalan-daya (power -fail) , konsumsi daya kurang dari 500nA menggunakan mode baterai cadangan dengan operasional osilator. Tersedia untuk industri dengan ketahanan suhu: -40C hingga +85C. Tersedia dalam kemasan 8 pin DIP atau SOIC.
Gambar 2.10 RTC DS1307 Penjelasan dari masing-masing kaki adalah sebagai berikut:
1. X1 dan X2 adalah pin yang dihubungkan dengan Kristal 32.768 KHz. 2. VBAT adalah pin yang dihubungkan masukan baterai +3V.
4. SDA adlah pin yang difungsiksan sebagai jalur data. 5. SCL adalah pin yang difungsikan sebagai jalur clock.
6. SQW/OUT adalah pin yang digunakan sebagai keluaran sinyal kotak. 7. VCC adalah pin untuk mencatu tegangan 5V.
DS1307 memiliki akurasi hingga tahun 2100. Sistem RTC DS1307 memerlukan baterai eksternal 3 volt yang terhubung ke pin Vbat dan ground. Pin
X1 dan X2 dihubungkan dengan Kristal osilator 32.768 KHz. Sedangkan pin
SCL, SDA, dan SQW/OUT di-pull-up dengan resistor (nilainya 1k sampai dengan 10k) ke Vcc. Untuk membaca data tanggal dan waktu yang tersimpan di memori RTC DS1307 dapat dilakukan melalui komunikasi serial I2C (Adrianto, 2012).
2.4 Perangkat Lunak
2.4.1 Code Vision AVR
Ada beberapa program yang dapat digunakan sebagai editor dan compiler
untuk mikrokontroler AVR, salah satunya yaitu CodeVision. CodeVisionAVR adalah salah satu alat bantu pemrograman (programming tool) yang bekerja dalam lingkungan pengembangan perangkat lunak yang terintegrasi (Integrated Development Environment, IDE). Seperti aplikasi IDE lainnya, CodeVisionAVR dilengkapi dengan source code editor, compiler, linker, dan dapat memanggil Atmel AVR Studio untuk debugger nya (Adrianto, 2012).
2.4.2 Sleep Mode Idle
menghentikan CPU. Tetapi mengizinkan modul-modul SPI, USART, Analog,
Comparator, TWI, Timer atau Counter, Watchdog, dan sistem interupsi, untuk terus bekerja. Mode sleep ini menghentikan clock clkCPU dan clkFlash, tetapi tetap menjalankan clock yang lain.
Mode idle dapat dibangunkan, baik oleh interupsi eksternal maupun internal seperti interupsi timer overflow dan USART transmit complete. Jika AVR tidak perlu dibangunkan dari idle melalui interupsi analog comparator maka sebaliknya analog comparator dimatikan dengan cara memberi logika 1 pada bit ACD supaya dapat lebih menghemat daya AVR dalam mode idle. Jika ADC diizinkan maka konversi dimulai secara otomatis ketika mode idle dimasuki (Nurcahyo, 2012).
2.4.3 X-CTU
X-CTU adalah sebuah aplikasi yang disediakan oleh DIGI, dimana program ini dirancang oleh Digi untuk berinteraksi dengan Xbee. Pada aplikasi ini
user bisa mengupdate firmware xbee dari coodinator menjadi Router/End
23
BAB III
METODE PENELITIAN
3.1. Metode Penelitian
Metode Penelitian yang digunakan pada pembuatan perangkat keras dan
perangkat lunak yaitu dengan studi pustaka. Dengan cara ini penulis berusaha
mendapatkan dan mengumpulkan data-data, informasi, dan konsep-konsep
bersifat teori dari buku, dan bahan-bahan materi kuliah dan juga internet yang
berkaitan dengan penelitian.
Dari data-data yang diperoleh maka disusun perancangan rangkaian
perangkat keras. Dalam pengujian perangkat keras ini dilakukan pengujian yang
didukung dengan program yang telah dibuat. Selanjutnya tahapan pembuatan
perangkat lunak. Terakhir adalah perakitan perangkat keras dengan kerja
perangkat lunak yang telah selesai dibuat.
Gambar 3.1 Blok diagram
Dari Gambar 3.1 menggambarkan blok diagram sistem, yang terdiri dari 4
buah node dan satu komputer yang berfungsi sebagai monitoring suhu dan
terhubung dengan komputer , fungsi dari node router adalah sebagai monitoring
data yang dikirim dari node sensor. Node coordinator terdiri dari Mikrokontroler
yang terhubung dengan xbee dan RTC, coordinator berperan sebagai jembatan
untuk meneruskan paket data dari node sensor. Node sensor terdiri dari
Mikrokontroler yang terhubung dengan xbee serta beberapa inputan sensor dan
RTC. Fungsi keduanya untuk mengirimkan hasil sensor suhu dan kelembaban dan
waktu menuju node router melalui perantara node coordinator.
3.2 Perancangan Perangkat Keras
3.2.1 Koneksi sensor dengan mikrokontroler sebagai node sensor
Pada perancangan ini membahas koneksi sensor dengan mikrokontroler
yang menggunakan kabel sebagai penghubung, dan untuk program dapat dilihat
pada lampiran. Sensor yang digunakan adalah soil moisture sebagai sensor
kelembaban tanah dan DHT11 sebagai sensor suhu, sebagai penunjuk waktu
menggunakan RTC. Sebelum sensor terhubung pada mikrokontroler harus
menentukan pin dengan benar pada mikrokontroler. Agar dalam pengiriman data
dari sensor dapat terdeteksi dengan baik. Pada Gambar 3.2 ditunjukan ada dua
buah sensor yang terhubung dengan mikrokontroler dan RTC, dengan ketentuan :
1. Pin out VCC pada sensor kelembaban tanah dengan pin 5V pada
mikrokontroler.
2. Pin out GND pada sensor kelembaban tanah dengan pin GND pada
mikrokontroler.
3. Pin out data pada sensor kelembaban tanah dengan pin A7 pada
4. Pin out VCC pada sensor suhu dengan pin out 5V pada mikrokontroler.
5. Pin out GND pada sensor suhu dengan pin GND pada mikrokontroler.
6. Pin out data pada sensor suhu tanah pada pin B0 pada mikrokontroler.
7. Pin out VCC pada RTC dengan pin 5V mikrokontroler.
8. Pin out GND pada RTC dengan pin GND mikrokontroler.
9. Pin out SDA pada RTC dengan pin D6 mikrokontroler.
10. Pin out SCL pada RTC dengan pin D7 mikrokontroler.
Gambar 3.2 Perancangan Perangkat keras Node Sensor
3.3 Perancangan Perangkat Lunak
Selain Perancangan perangkat keras juga diperlukan perancangan
perangkat lunak agar sisem berjalan dengan baik, perancangan perangkat lunak
meliputi algoritma dan program pada mikrokontroler, beserta flowchart yang
3.3.1 Perancangan Mikrokontroler sebagai Node sensor
Proses mikrokontroler sebagai node sensor dapat dilihat pada flowchart
Gambar 3.3 :
Gambar 3.3 Flowchart node sensor
Pada flowchart node sensor terdapat 3 pokok proses utama yaitu :
1. Inisialisasi
Pada proses inisialisasi mikrokontroler terlebih dahulu membaca port
input apa saja yang terhubung, dan pengolahan data pada setiap masing masing
sensor. Untuk program pengolahan data masing masing sensor dapat dilihat pada
lembar lampiran. Kemudian mikrokontroler siap untuk menerima data yang
“M”, yang artinya node sensor harus mengirimkan data yang diminta oleh node
coordinator yang berisi sensor suhu, kelembaban, dan waktu. Berikut adalah
cuplikan program ketika node sensor menerima karakter “M” :
if(data == 'M') data_baterai = (float)(read_adc(2)*5.00)/233.00; //baca sensor baterai rtc_get_time(&jam,&menit,&detik); //baca rtc
data_tmp = (int)abs(data_baterai*100); }
2. Pengiriman data
Dalam pengiriman data sudah dikonsep format pengirman data, proses
pengiriman data diawali dengan header dan diakhiri dengan trailer. Header data
diawali dengan karakter “A” yang berasal dari node sensor kemudian diikuti
dengna data suhu, kelembaban tanah dan penunjuk waktu. Setelah data telah
terambil secara urutannya sesuai dengan format pengiriman, akan dikhiri dengan
trailer berupa karakter “*” . Perlu diketahui untuk setiap urutan data yang telah
tersusun harus ada pemisah berupa karakter antara data satu dengan selanjutnya.
Berikut adalah format pengiriman data beserta karakter pemisah antar data, yang
Gambar 3.4 Format pengiriman data
Berikut adalah penjelasan dari gambar :
1. “A” : digunakan sebagai Header data.
2. “@” : Penanda karakter data suhu.
3. “#” : Penanda karakter data K_tanah.
4. “$” : Penanda karakter data Volt.
5. “^” : Penanda karakter data jam.
6. “&” : Penanda karakter data menit.
7. “*” : Penanda karakter data detik.
Data-data tersebut dikirim secara bersamaan pada saat node coordinator
meminta data, berikut adalah cuplikan program node sensor mengirim data :
printf("A%d@%d?%d#%d$%d^%d&%d*", suhu, k_tanah, k_udara, data_tmp,
jam, menit, detik);
3. Sleep mode
Setelah mikrokontroler mengirimkan seluruh data yang diinginkan oleh
router atau end user, mikrokontroler akan kembali pada kondisi sleep mode guna
menghemat daya pada node sensor. berikut adalah cuplikan program sleep pada
mikrokontroler :
interrupt [TIM2_OVF] void timer2_ovf_isr(void) {
4. Sinkronisasi Waktu
Sinkronisasi waktu dilakukan untuk mengatur waktu pada node sensor
agar sinkron dengan waktu yang ada pada aplikasi. Jadi data yang diambil
menunjukan data realtime. Untuk mengatur waktu pada node sensor masih
dilakukan dengan cara manual, dengan mengatur RTC yang ada pada node sensor,
RTC tetap berjalan meskipun dalam kondisi sleep mode, dikarenakan pada modul
RTC memiliki sumber tegangan sendiri. Jadi ketika aplikasi meminta data, secara
otomatis node sensor juga mencantumkan waktu pada saat pengambilan data dan
dikirimkan dalam satu paket. Berikut adalah potongan program untuk mengatur
waktu pada node sensor.
void set_rtc1() {
rtc_get_time(&jam,&menit,&detik); if(jam == 0)
{
rtc_set_time(5,30,0); //jam:menit:detik
rtc_set_date(3,17,7,2016); //minggu,hari,bulan,tahun
}
}
3.3.2 Perancangan Mikrokontroler sebagai Node Coordinator
Proses mikrokontroler sebagai node coordinator dapat dilihat pada
Gambar 3.5 Flowchart Node Coordinator
Dalam Gambar 3.5 sebagai flowchart proses node coordinator terdapat 2
proses utama yaitu :
1. Menerima Perintah.
Pada proses menerima perintah node coordinator mendapat perintah dari
node router untuk mengambil data pada node sensor, kemudian perintah tersebut
diteruskan oleh node coordinator kepada node sensor. Dari flowchart di atas
ditunjukan pada Terima = “L”, jika node coordinator menerima karakter “L” yang
berasal dari node router, maka node coordinator harus meneruskan perintah
tersebut ke node sensor dengan mengirimkan perintah yang ditandai dengan
oleh node sensor yang mana proses tersebut telah dijelaskan pada penjelasan
sebelumnya.
2. Pengiriman Data.
Proses pengiriman data node coordinator bertugas untuk meneruskan paket
yang dikirim dari node sensor menuju node router. Setelah tugas meneruskan data
dari node sensor selesai kemudian node coordinator mengirimkan paket data yang
berisi jam, menit dan detik yang berasal dari node coordinator sendiri dan di
akhiri dengan mengirim karakter “D3”, yang menandakan bahwa node tersebut
aktif.
3. Sinkronisasi waktu
Pada node coordinator juga dilakukan proses sinkronisasi waktu, supaya data
yang akan diinformasikan pada aplikasi juga secara realtime. Untuk mengatur
waktu pada node coordinator sama seperti penjelasan pada pengaturan waktu node
sensor.
3.3.3 Perancangan Visual Basic
Aplikasi visual basic digunaka pada komputer sebagai end device yang
berfungsi untuk monitoring data yang telah dikirm dari node sensor. berikut
Gambar 3.6 Aplikasi monitoring
Dari Gambar 3.6 aplikasi monitoring terdapat fungsi masing masing
bagian. Untuk kolom port berfungsi sebagai pilihan com USB xbee adapter yang
terhubung pada komputer atau end device. Kolom baudrate berfungsi untuk
memilih baudrate dan nilainya harus sama pada settingan yang digunakan pada
xbee. pada kolom text node 1, node 2, dan coordinator berfungsi untuk
menampilkan data yang telah dikirim oleh masing-masing node. Banyak
pengambilan data bersangkutan dengan interval waktu kirim, untuk interval
waktu kirim menggunakan hitungan menit. Jadi user ingin mengambil berapa
banyak data dalam interval waktu beberapa menit. Misalkan banyak data diisi 10,
interval waktu 1, artinya user akan menerima 10 data dalam waktu 1 menit sekali.
Pada aplikasi tersebut juga terdapat penunjuk waktu. Untuk alur program pada
Pada Gambar 3.7 flowchart aplikasi monitoring terdiri 3 bagian pokok
proses yaitu :
1. Inisialisasi
Pada inisialisasi adalah proses awal aplikasi dibuka dan menseting
beberapa bagian. Pertama user harus memilih com USB adapter xbee yang
terhubung dengan komputer end user misal pilihannya adalah com 2, jadi kita
pilih com tersebut. Kemudian pilih baudrate sesuai dengan nilai baudrate pada
xbee, setelah memilih baudrate isikan berapa banyak data yang akan diambil pada
kolom pengambilan data, beserta interval waktunya. Setelah semua sudah di
seting klik button connect, apabila tulisan connect berubah menjadi disconnect itu
tandanya bahwa aplikasi telah connect atau terhubung dengan xbee dan aplikasi
telah berjalan.
2. Proses request data
Proses pengambilan data berawal pada pembacaan com, jika com terbuka
maka aplikasi langsung menuju proses pembacaan waktu jam,menit,dan detik.
Kemudian waktu akan ditambahkan dengan interval waktu yang diseting oleh
user. Waktu akan mengecek berlualang-ulang apakah waktu lebih dari atau sama
dengan menit yang user seting, jika kondisi tersebut terpenuhi maka aplikasi
mengirimkan Karakter “M” yang akan ditujukan kepada node sensor melalui
coordinator.
3. Proses Penerimaan data
Setelah proses request data aplikasi telah siap menerima data, node sensor
mengirim karakter “D” yang artinya node sensor telah bangun dari slee mode dan
data. Ketika aplikasi menerima data yang dikirimkan dari node sensor tidak
langsung ditampilkan, namun terlebih dahulu melalui proses pencacahan data agar
aplikasi mengetahui data yang dikirimkan. Dimulai dari data suhu yang ditandai
dengan karakter “@”, kemudian disimpan pada variabel suhu. Data kelembaban
tanah ditandai dengan karakter ”#” kemudian disimpan pada variabel k_tanah.
Data Volt ditandai dengan karakter “$” kemudian disimpan pada variabel Volt.
Data jam ditandai dengan karakter “^” kemudian disimpan pada variabel jam.
Data menit ditandai dengan karakter “&” kemudian disimpan pada variabel menit.
Data detik ditandai dengan karakter “*” kemudian disimpan pada variabel detik.
Setelah data terkumpul aplikasi akan menampilkan seleruh data pada kolom node
dan kolom node yang berwarna merah menjadi hijau pertanda bahwa node
tersebut telah aktif. Berikut adalah Gambar 3.8 yang menunjukan aplikasi
menampilkan data :
Gambar 3.8 Aplikasi Menerima dan Menampilkan Data
4. Sinkronisasi Waktu
Pada aplikasi juga dilakukan sinkronisasi waktu. Waktu pada aplikasi
coordinator dan node sensor. Aplikasi langsung mengambil data waktu dari
komputer, jadi waktu pada aplikasi juga harus secara realtime. Berikut adalah
potongan program pada aplikasi pada saat mengambil data waktu komputer.
Private Sub Timer1_Tick(sender As Object, e As EventArgs) Handles Timer1.Tick
jam_leptop = Now.Hour If jam_leptop > 12 Then
jam_leptop = jam_leptop - 12 End If
menit_leptop = Now.Minute detik_leptop = Now.Second TextBox1.Text = Now
End Sub
3.4 Perakitan Seluruh Alat
Setelah proses inisialisasi sensor yang telah terhubung pada
mikrokontroler dan telah di uji coba kemudian menguji koneksi xbee antar node
sesuai peranannya. Sistem sleep mode juga berjalan dengan baik, aplikasi pada
sistem monitoring telah slesai di konsep sesuai kebutuhan, maka selanjutnya
adalah perakitan keseluruhan alat mulai dari node sensor dan coordinator
dirangkai beserta sensor,dapat dilihat pada Gambar 3.9.
37 BAB IV
HASIL PENGUJIAN DAN PENGAMATAN
Pengujian sistem yang akan dilakukan penulis mulai dari perangkat keras dan perangkat lunak secara keseluruhan agar mengetahui apakah sistem berjalan sesuai dengan harapan. Sistem yang akan diuji meliputi :
4.1 Pengujian Sensor Suhu 4.1.1 Tujuan
Pengujian sensor suhu berfungsi untuk mengetahui informasi suhu udara yang berada pada node sensor. data yang berasal dari sensor kemudian diolah oleh mikrokontroler supaya dapat menghasilkan nilai suhu sebenarnya.
4.1.2 Alat yang Digunakan
Peralatan yang akan digunakan pada node sensor untuk pengujian adalah sebagai berikut:
1. Mikrokontroler. 2. Sensor suhu / DHT11 . 3. Baterai 12 Volt. 4. LCD.
4.1.3 Prosedur Pengujian
1. Hubungkan mikrokontroler dengan sensor suhu dengan kabel dan sesuaikan
port input dan output.
2. Tambahkan LCD pada mikrokontroler sebagai display. 3. Upload program untuk pembacaan sensor suhu.
4. Hubungukan mikrokontroler dengan baterai sebagai daya mikrokontroler. 5. Ambil data yang keluar pada LCD dan bandingkan dengan alat ukur
(thermometer).
4.1.4 Hasil Pengujian
Pada pengujian sensor suhu, sensor langsung membaca suhu pada saat mikrokontroler dinyalakan. Untuk pengujian dapat dilihat pada Gambar 4.1.
Gambar 4.1 Node sensor yang terhubung pada sensor suhu
yang berbeda. Pada Gambar 4.2 adalah output sensor suhu yang ditampilkan pada LCD dan dibandingkan pada thermometer. Berikut adalah hasil sensor dan
thermometer ditunjukan pada Tabel 4.1.
Tabel 4.1 Hasil Pengujian Sensor Suhu
Data pada Tabel 4.1 menunjukan bahwa sensor suhu DHT11 mampu mendeteksi dengan baik. Tingkat rata-rata presentase error sensor suhu tersebut adalah 2,5%, didapatkan dari jumlah error seluruh pengambilan data. Data sheet
sensor DHT 11 memiliki skala temperature dari 0-50 0 C, dengan toleransi kesalahan ± 2 0 C. Jadi hasil dari pengukuran masuk dalam toleransi error.
4.2 Pengujian Sensor Kelembaban
4.2.1 Tujuan
Pengujian sensor kelembapan berfungsi untuk mengetahui informasi kadar air tanah pada tanaman. Pada pengujian ini sensor kelembaban tanah diaplikasikan langsung pada pot tanaman.
4.2.2 Alat yang Digunakan
Peralatan yang akan digunakan pada node sensor untuk pengujian adalah sebagai berikut:
1. Mikrokontroler.
2. Sensor Kelembapan tanah. 3. Baterai 12 Volt.
4. LCD.
4.2.3 Prosedur Pengujian
1. Hubungkan mikrokontroler dengan sensor kelembapan dengan kabel dan sesuaikan portinput dan output.
3. Upload program untuk pembacaan sensor kelembaban tanah.
4. Hubungkan mikrokontroler dengan baterai sebagai daya mikrokontroler. 5. Ambil data yang keluar pada LCD dan bandingkan dengan alat ukur.
4.2.4 Hasil Pengujian
Pada pengujuian sensor kelembapan, sensor langsung membaca suhu pada saat mikrokontroller dinyalakan. Untuk pengujian dapat dilihat pada Gambar 4.2.
Gambar 4.2
Gambar 4.2 Pengujian Sensor Kelembaban Tanah
Tabel 4.2 Hasil Pengujian sensor Kelembaban Tanah
error 4.9 %. Masih masuk dalam toleransi error. Sensor tetap mampu bekerja dan dapat membedakan kondisi kering, lembab, ataupun basah.
4.3 Pengujian Keseluruhan Sistem
4.3.1 Tujuan
Pengujian keseluruhan bertujuan untuk mengetahui sistem dari tugas akhir ini. Sistem ini akan diuji dari keseluruhan perangakat dan diproses secara bersamaan, mulai dari komputer, node coordinator dan node sensor apakah berjalan dengan baik dan dapat menghemat daya menggunakan sleep mode. Sistem sleep mode akan dibandingkan dengan sistem yang tidak menggunakan
sleep mode.
4.3.2 Alat yang Digunakan
Peralatan yang akan digunakan untuk pengujian adalah sebagai berikut: 1. Mikrokontroler node sensor.
2. Mikrokontroler node coordinator.
3. Sensor suhu dan Kelembapan tanah. 4. Baterai lipo 12 Volt 1000 mA. 5. Komputer.
6. Xbee router.
4.3.3 Prosedur Pengujian
1. Hubungkan mikrokontroler node coordinator dan sensor dengan baterai kemudian nyalakan mikrokontroler.
2. Siapkan aplikasi monitoring.
3. Hubungkan komputer dengan xbee router.
4. Ambil data suhu dan kelembapan pada node sensor dengan waktu yang ditentukan.
5. Ukur tegangan dan arus pada node coordinator dan sensor pada waktu yang telah ditentukan.
4.3.4 Hasil Pengujian
Dari pengujian keseluruhan sistem ini membandingkan ketahanan daya antara sistem sleep mode dan sistem yang tidak menggunakan sleep mode. Pengujian kedua sistem tersebut memiliki aturan yaitu setiap sistem yang berjalan akan melakukan proses pengiriman 5 paket data setiap 10 menit sekali. Setelah dilakukan pengambilan data tegangan dan arus awal, pada sistem sleep mode di dapatkan pada node sensor dengan tegangan awal 12.55 Volt dengan arus yang terukur 1.11 mA. Setelah diukur didapatkan daya awal baterai sebesar 13.91 mW. Untuk proses pengambilan data Voltase dan arus selanjutnya, dilakukan setiap 30 menit sekali sampai baterai pada kondisi warning. Kondisi baterai warning berada di level tegangan 11.7 Volt.
mampu bertahan 330 menit atau 5 jam 30 menit. Pada tabel 1 hasil pengukuran dapat terlihat selisih antara sistem sleep mode dan tidak menggunakan sleep mode. Sistem tidak menggunakan sleep mode hanya bertahan hingga 240 menit atau 4 jam, artinya sistem sleep mode lebih hemat 90 menit atau 1 jam 30 menit. Maka dari hasil tersebut sistem sleep mode dapat melakukan penghematan daya hingga ± 19 %.
Tabel 4.3 Pengukuran Penurunan Daya Baterai Node Sensor
Gambar 4.3 Perbandingan Penurunan Daya Baterai Node Sensor
Pada node coordinatror juga dilakukan pengujian sama seperti node sensor. Pada node coordinator didapatkan hasil pengukuran awal dengan tegangan 12.53 Volt, arus 1.11 mA dan daya terukur 13.91 mW. Proses pengukuran selanjutnya juga dilakukan setiap 30 menit. Sehingga didapatkan hasil pengukuran akhir dengan tegangan 11.69 Volt, arus 1.01 mA, dan daya 11.81 mW. Node
coordinator dengan menggunakan sistem sleep mode mampu bertahan 210 menit atau 3 jam 30 menit. Untuk sistem yang tidak menggunakan sleep mode mampu bertahan 180 menit atau 3 jam. Coordinator dengan sistem sleep mode mampu bertahan 30 menit lebih lama dengan presentase penghematan daya sebesar ± 15%. Untuk hasil konsumsi daya dapat dilihat pada Tabel 4.4.
Tabel 4.4 Pengukuran Penurunan Daya Baterai Node Coordinator
4 90 12,15 12,09 1,07 1,06 13,00 12,82
5 120 12,05 11,9 1,05 1,03 12,65 12,26
6 150 11,87 11,79 1,04 1,02 12,34 12,03 7 180 11,77 11,69 1,02 1,01 12,01 11,81
8 210 11,69 1,01 11,81
Gambar 4.4 Perbandingan Penurunan Daya Baterai Node Coordinator
Pada pengujian keseluhan sistem ini juga dilakukan pengujian transmisi data. Pengujian ini dilakukan untuk mengetahui tingkat keberhasilan dari node
sensor untuk mengirimkan data yang di pesan oleh aplikasi. Pengujian transmisi data ini dilakuan seetiap 10 menit sekali dengan mengirimkan 5 data. Hasil dari pengujian transmisi data dapat dilihat pada Tabel 4.5.
Tabel 4.5 Hasil Pengujian Transmisi Data.
4.4 Pengujian Jarak jangkau pengiriman Xbee S2 4.4.1 Tujuan
Pengujian ini bertujuan untuk mengetahui kemampuan jarak jangkau xbee
S2 dalam mengirim dan menerima data.
4.4.2 Alat yang Digunakan
Peralatan yang digunakan untuk pengujian ini adalah sebagai berikut : 1. Xbee S2 dua buah.
2. Xbee adapter dua buah. 3. Kabel USB 2 buah.
4. Komputer atau laptop dua buah.
4.4.3 Prosedur Pengujian
1. Pasang xbee dengan xbee adapter.
2. Hubungkan xbee adapter dengan laptop. 3. Buka program terminal pada X CTU.
4. Setelah kedua xbee connect, ukur jarak antar xbee hingga jangkauan penerima maksimal.
4.4.4 Hasil Pengujian
Tabel 4.6 Hasil Pengujian Jarak Xbee
NO Jarak
(Meter) Keterangan
1 10 Berhasil
2 20 Berhasil
3 30 Berhasil
4 40 Berhasil
5 50 Berhasil
6 60 Berhasil
7 70 Berhasil
8 80 Berhasil
9 85 Gagal
10 90 Gagal
51 BAB V PENUTUP
Berdasarkan Pengujian pada perangkat keras dan perangkat lunak yang digunakan dalam tugas akhir ini, maka dapat diambil kesimpulan dan saran-saran dari hasil yang diperoleh.
5.1 Kesimpulan
1. Berdasarkan hasil pengujian terhadap monitoring pembacaan sensor suhu dan kelembaban tanah yang telah dilakukan dalam pembuatan sistem monitoring
tanaman jarak dapat ditarik kesimpulan sebagai berikut :
a. Rata-rata presentase error pada sensor suhu pada node sensor adalah 2.5% b. Rata-rata presentase error pada sensor kelembaban tanah pada node sensor
adalah 4.9 %
2. Berdasarkan pengujian terhadap sistem, dengan proses pengambilan 5 data dalam rentang waktu setiap 10 menit sekali, dapat ditarik kesimpulan sebagai berikut.
a. Sistem sleep mode dalam node sensor dapat berjalan dengan baik untuk penghematan daya dengan selisih waktu ketahanan baterai selama 1 jam 30 menit dengan presentase penghematan daya ± 19 %.
c. Jika rentang waktu sleep lebih lama maka dapat menambah presentase penghematan daya.
d. Pengujian transmisi data dapat berjalan dengan baik, dengan melakukan 30 kali pengujian pengiriman data didapatkan rata-rata error sebesar 13,33%.
3. Berdasarkan hasil pengujian terhadap jarak jangkau pengiriman data xbee S2 dapat ditarik kesimpulan, bahwa jarak maksimal pengiriman data adalah 80 Meter.
5.2 Saran
Sebagai pengembangan dari penelitian yang telah dilakukan, penulis memberikan saran sebagai berikut :
1. dalam pengukuran tegangan, arus, dan daya pada penelitian ini masih dilakukan dengan cara manual. Sehingga diharapkan dapat dilakukan pengecekan secara otomatis seperti sistem pemantau suhu dan kelembapan tanah, dengan penambahan sensor arus dan tegangan pada setiap node.
2. Pada proses pengiriman dan penerimaan data masih didapatkan adanya loss
53
Abdul Kadir, H. (2005). Algoritma Pemrograman menggunakan C++.
Yogyakarta: Andi.
Alim, T. (2012, Oktober 1). Jarak Pagar (Jatropha Curca L:) dan Klasifikasinya. Dipetik September 20, 2015, dari http://www.biologi-sel.com/2013.
Andrianto, H. (2013). Pemrograman Mikrokontroler AVR ATmega16 menggunakan Bahasa C. Bandung: Informatika.
Arduino. (2011). Arduino XBee Shield. Retrieved September 2015, 15, from
DFrobot. (2012, January 1). Moisture Sensor (SKU:SEN0114). Dipetik September
30, 2015, dari
http://www.dfrobot.com/wiki/index.php/Moisture_Sensor_(SKU:SEN011 4).
Nofianto, R. H., Jusak, & Susanto, P. (2014). Rancang Bangun Aplikasi dan Gateway Wireless Sensor Network untuk Pemantauan Lahan Tanaman Jarak. Journal of Control and Network System, 01-08.
Nurcahyo, S. (2012). Aplikasi dan Teknik Pemrograman MikrokontrolerAVR Atmel. Yogyakarta: Andi.
Riajaya, P. D., Kadarwati, F. T., & Yoga, S. (2007). Keragaan Produksi Biji Jarak Pagar pada Berbagai Ketersediaan Air Tanah. 137-143.
Robosoccer. (2012, November 21). Konfigurasi Xbee Point to Multipoint. Dipetik
Oktober 26, 2015, dari
Rolis, G. (2012). Wireless Sensor Network (WSN) dan algoritma PEGASIS.
Retrieved September 15, 2015, from gitorolis.weebly.com: http://gitorolis.weebly.com/4/post/2011/02/ad-hoc-wireless-lan-peer-to-peer.html
Surabaya, P. E. (t.thn.). Komunikasi Nirkabel Menggunakan Modul RF X-Bee : Untuk Implementasi Wireless Sensor Network (WSN). Politeknik Elektronika Negeri Surabaya, hal. 1-10.
Syafril, D., Wijaya, Y. P., & Madona, P. (2013). Penghematan Daya pada Sensor Node menggunakan Pengaturan Waktu Kirim Data. Jurnal Teknik Elektro dan Komputer, 18-28.
Winoto, A. (2008). Mikrokontroler AVR ATmega 8/32/16/8535 dan Pemrogramannya dengan Bahasa C pada WinAVR. Bandung: Informatika.