MASALAH OPTIMISASI SUPERSTRUKTUR SINTESIS JARINGAN AIR DENGAN KETIDAKPASTIAN
TESIS
Oleh
M. NATSIR
107021023/MT
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM PROGRAM STUDI MAGISTER MATEMATIKA
UNIVERSITAS SUMATERA UTARA MEDAN
MASALAH OPTIMISASI SUPERSTRUKTUR SINTESIS
JARINGAN AIR DENGAN KETIDAKPASTIAN
T E S I S
Diajukan Sebagai Salah Satu Syarat untuk Memperoleh Gelar Magister Sains dalam Program Studi Magister Matematika Pada Fakultas
Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara
Oleh M. NATSIR 107021023/MT
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM PROGRAM STUDI MAGISTER MATEMATIKA
UNIVERSITAS SUMATERA UTARA MEDAN
Judul : MASALAH OPTIMISASI SUPERSTRUKTUR SINTESIS JARINGAN AIR DENGAN KETIDAKPASTIAN
Nama : M. Natsir Nomor Pokok : 107021023/MT Program Studi : Matematika
Menyetujui, Komisi Pembimbing
Prof. Dr. Tulus, M.Si Prof. Dr. Opim Salim S, M.Sc
Ketua Anggota
Ketua Program Studi Dekan
Prof. Dr. Herman Mawengkang Dr. Sutarman, M.Sc
Telah diuji pada:
Tanggal: 11 Agustus 2012
PANITIA PENGUJI TESIS
Ketua : Prof. Dr. Tulus, M.Si
Anggota : 1. Prof. Dr. Opim Salim S, M.Sc 2. Dr. Saib Susilo, M.Sc
ABSTRAK
Pada tesis ini dibahas masalah optimisasi superstruktur sintesis jaringan air dengan ketidakpastian suatu sistem jaringan air terpadu dengan menggunakan proses dan operasi pengolahan air yang tergabung pada jaringan tunggal sede-mikian hingga total biaya konstruksi jaringan dan operasionalnya optimal dan meminimalkan secara global.
Disain jaringan harus layak dan optimal atas himpunan skenario yang diten-tukan dan memenuhi syarat optimal yang berbeda. Parameter operasional tidak pasti dalam sistem ini merupakan jumlah kontaminasi yang dihasilkan dalam unit proses dan penetrasi kontaminasi di dalam unit pemurnian.
Pengoptimalan superstruktur dengan menggabungkan semua alternatif de-sain yang layak untuk pengolahan air limbah atau mendaur ulang dengan model pemograman non linier integer campuran multi skenario non konvek yang meru-pakan suatu model pemograman stokastik multi stage deterministik.
Model MINLP dapat digunakan untuk menemukan desain jaringan yang op-timal dengan nomor yang berbeda dari aliran dalam jaringan pipa. Strategi yang dikemukakan dengan mengandalkan batas pada variabel yang diturunkan seba-gai persamaan umum yang diperoleh dengan pemeriksaan fisik dan menggunakan logika spesifikasi yang dibutuhkan untuk menyelesaikan model.
ABSTRACT
The problem of optimal sintesis of an integrated water system is discussed
in this tesis, where water using processes and water treatment operations are
com-bined into a single network such that the total cost of building the network and
operating it optimally is globally minimized.
The network has to be designed to be feasible and optimal over a given set of
scenarios in which different operational conditions hold. The uncertain operational
parameters in the system are the amount of contaminants generated in the process
units and the extent of removal of the contaminants inside the treatment units.
We optimize a superstructure that incorporates all feasible design
alternati-ves for waste water treatment, reuse and recycle, with a multiscenario nonconvex
mixed integer nonlinear programming model, which is a deterministic equivalent
of a multi stage stochastic programming model with recourse.
The MINLP model can be used to find optimal network designs with different
number of streams in the piping network. In this work, we propose to represent
the bounds on the variables as general equations obtained by physical inspection of
the superstructure and using logic specifications needed for solving the model.
Keyword: Global optimization, Integrated water networks, Nonconvex MINLP,
KATA PENGANTAR
Puji syukur penulis panjatkan kehadirat Allah SWT yang telah memberik-an kesempatmemberik-an dmemberik-an kekuatmemberik-an kepada penulis untuk menyelesaikmemberik-an tugas akhir yang berjudul Masalah Optimisasi Superstruktur Sintesis Jaringan Air Dengan Ketidakpastian sebagai salah satu syarat untuk memperoleh gelar Magister pa-da Program Pasca Sarjana Jurusan Matematika Fakultas Matematika pa-dan ilmu Pengetahuan Alam Universitas Sumatera Utara.
Penghargaan dan ucapan terima kasih penulis sampaikan kepada pihak-pihak yang telah membantu dan memberikan kontribusi sehingga selesainya tesis ini yaitu :
Bapak Prof.Dr.dr.Syahril Pasaribu, DTM&H, M.Sc,(CTM) Sp,A(K) selaku Rektor Universitas Sumatera Utara yang telah memberikan kesempatan kepada penulis untuk menempuh pendidikan di universitas Sumatera Utara.
Bapak Prof. Dr. Herman Mawengkang, Ketua Program Studi Magister Matematika FMIPA Universitas Sumatera Utara yang telah memberikan motivasi dan pengarahan sehingga selesainya tesis ini.
Bapak Prof. Dr. Tulus, MSi, sebagai Pembimbing I dan Ketua Jurusan Matematika FMIPA Universitas Sumatera Utara yang telah banyak membantu untuk keberhasilan penulis.
Bapak Prof. Dr. Opim Salim S, M.Sc, Pembimbing II yang telah membim-bing dan memberikan arahan untuk kesempurnaan tesis ini.
Bapak Dr. Sutarman, M.Sc , sebagai Penguji dan Dekan Fakultas Mate-matika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara, yang telah mem-berikan kesempatan kepada penulis untuk mengikuti Program Magister Mate-matika di FMIPA Universitas Sumatera Utara.
Bapak dan Ibu Dosen Program Studi Magister Matematika FMIPA Univer-sitas Sumatera Utara yang telah memberikan materi perkuliahan dan pembekalan selama perkuliahan sehingga selesainya tesis ini.
Ibu Misiani, S.Si, staf administrasi Program Studi Magister Matematika FMIPA Universitas Sumatera Utara yang banyak membantu bidang administrasi.
Rekan-rekan Dosen Jurusan Matematika FMIPA Universitas Riau yang te-lah bahu membahu, senasib sepenaggungan dalam mengapai cita-cita untuk mening-katkan mutu dan layanan kepada mahasiswa.
Bapak Rektor Universitas Riau dan Dekan FMIPA Universitas Riau yang telah memberikan bantuan dan rekomendasi, izin belajar serta motivasi kepada penulis dalam menyelesaikan perkuliahan ini.
Isteri tercinta Nurlina, S.Pd, Ananda Mickey Elsen SE, Ferry Hendersen dan Meilly Olivia yang telah memberikan dorongan dan semangat kepada penulis dalam menyelesaikan perkuliahan ini.
Semoga Yang Maha Kuasa berkenan membalasnya dan pahala setimpal dan semoga Tesis ini dapat memberikan kontribusi optimal kepada pihak yang me-merlukannya.
FMIPA UNIVERSITAS SUMATERA UTARA Penulis
RIWAYAT HIDUP
M. Natsir dilahirkan di Bukittinggi tanggal 21 Dersember 1955, anak kedua dari empat bersaudara. Menamatkan SD tahun 1969 di SD Negeri 2 Pekanbaru, SMP Negeri 3 Pekanbaru tahun 1972 dan SMA Negeri I Pekanbaru tahun 1975.
Melanjutkan pendidikan ke Jurusan Matematika FIPIA Universitas Riau dan menyelesaikan Program Sarjana Muda [Gelar BSc] tahun 1979 serta melan-jutkan program Sarjana lengkap Jurusan Matemtika FMIPA Universitas Riau tahun 1981 dan menyelesaikannya tahun 1984.
Tahun 1981 Penulis diterima sebagai tenaga administrasi dan Mutasi men-jadi tenaga pengajar / Dosen tahun 1984 serta mendapatkan Sertifikasi sebagai Dosen Profesional mulai Januari 2011 dalam bidang Matematika.
DAFTAR ISI
Halaman
ABSTRAK . . . i
ABSTRACT . . . ii
KATA PENGANTAR . . . iii
RIWAYAT HIDUP . . . v
DAFTAR ISI . . . vi
DAFTAR TATA NAMA . . . viii
BAB 1 PENDAHULUAN . . . 1
1.1 Latar Belakang . . . 1
1.2 Perumusan Masalah . . . 4
1.3 Tujuan Penelitian . . . 4
1.4 Manfaat Hasil Penelitian . . . 4
1.5 Metodologi Penelitian . . . 5
BAB 2 SUPERSTRUKTUR UMUM DAN OPTIMISASI GLOBAL DESAIN PROSES JARINGAN AIR TERPADU . . . 7
BAB 3 PEMROGRAMAN STOKASTIK . . . 11
3.1 Pengertian Pemrograman Stokastik . . . 11
3.2 Program Stokastik Dua Tahap . . . 14
3.3 Pengertian Dasar Program Stokastik Tahap Ganda . . . 18
3.4 Ilustrasi Pemrograman Stokastik . . . 28
BAB 4 MASALAH OPTIMISASI SUPERSTRUKTUR SINTESIS JARINGAN AIR DENGAN KETIDAKPASTIAN . . . 36
4.1 Model Multiscenario MINLP . . . 38
4.1.1 Fungsi Tujuan . . . 39
4.2.1 Satuan Mixer . . . 41
4.2.2 Satuan Splitter . . . 41
4.2.3 Satuan Proses . . . 42
4.2.4 Satuan Pemurnian . . . 42
4.2.5 Pemotongan Keterikatan Batas . . . 43
4.2.6 Desain Kendala . . . 43
4.2.7 Hubungkan Batasan . . . 44
BAB 5 KESIMPULAN DAN RISET LANJUTAN . . . 45
5.1 Kesimpulan . . . 45
5.2 Riset Lanjutan . . . 45
DAFTAR TATA NAMA
• Himpunan & Indeks
i, k Indeks aliran j Kontaminasi
m Mixer
min Aliran masuk kedalam mixer m
mout Aliran keluar dari mixer m
M U Himpunan dari mixer-mixer n Skenario
N Himpunan skenario-skenario P Unit Proses
Pin Aliran masuk kedalam Unit Proses P
Pout Aliran keluar dari Unit Proses P
P U Himpunan dari Unit-unit Proses s Splitter
sin Aliran masuk kedalam splitter s
sout Aliran keluar dari splitter s
SU Himpunan dari splitter-splitter t Unit Treatment
tin Aliran masuk kedalam Unit Treatment t
tout Aliran keluar dari Unit Treatment t
T U Himpunan dari Unit Treatment
• Parameter
AR Faktor tahunan untuk investment pada unit treatment dan pipa
CF W Biaya air bersih
CiL
dalam skenario n CiU
J n Batas atas konsentrasi dari kontaminan j dalam alirani
dalam skenario n Ci
p Koefisien biaya yang terkait dengan eksistensi pipa i
FiL
n Batas bawah flow pada aliran idalam skenario n
FiU
n Batas atas flow pada aliran i dalam skenario n
FiL Batas bawah pada variabel disain Fi
FiU Batas atas pada variabel disain Fi
H Jam Operasi pabrik per annum
ICt Koefisien biaya investasi untuk Unit Treatment t
IPi Koefisien biaya investasi untuk pipa i
Lpjn Proses kontaminan j dalam unit proses p pada skenario n
Lpjw Proses kontaminan j dalam unit proses p pada kasus skenario worst OCt Koefisien biaya operasi untuk Unit Treatment t
Pn Probability assigned pada occurence scenario n
Pp Kebutuhan air dalam unit proses p
P Mi Koefisien biaya operasi pompa air melalui pipa i
α Eksponen fungsi biaya, 0< α≤1 βr
jn 1 - (Rasio penghapusan untuk kontaminan j dalam unitr(dalam %)
dalam skenario n)/100
βr
jw 1 - (Rasio penghapusan untuk kontaminan j dalam unitr(dalam %)
dalam skenario worst w)/100
∂ Eksponen fungsi biaya, 0< ∂ ≤1 τinf, τiny Pengali Lagrange
• Variabel Kontinu
Ci
jn Konsentrasi kontaminan j dalam alirani dalam skenario n
Cin
jn Konsentrasi kontaminan j dalam aliran discharge pada lingkungan
dalam skenario n fi
fout
jn Alur kontaminan j dalam aliran keluar pada lingkungan i dalam
skenario n Fi
n Flowrate aliran i dalam skenario n
Fout
n Flowrate aliran keluar pada lingkungan dalam skenario n
Fi Alur dari aliran maksimum air dalam pipa i
F Wn Pengaliran air bersih pada sistem dalam skenario n
ABSTRAK
Pada tesis ini dibahas masalah optimisasi superstruktur sintesis jaringan air dengan ketidakpastian suatu sistem jaringan air terpadu dengan menggunakan proses dan operasi pengolahan air yang tergabung pada jaringan tunggal sede-mikian hingga total biaya konstruksi jaringan dan operasionalnya optimal dan meminimalkan secara global.
Disain jaringan harus layak dan optimal atas himpunan skenario yang diten-tukan dan memenuhi syarat optimal yang berbeda. Parameter operasional tidak pasti dalam sistem ini merupakan jumlah kontaminasi yang dihasilkan dalam unit proses dan penetrasi kontaminasi di dalam unit pemurnian.
Pengoptimalan superstruktur dengan menggabungkan semua alternatif de-sain yang layak untuk pengolahan air limbah atau mendaur ulang dengan model pemograman non linier integer campuran multi skenario non konvek yang meru-pakan suatu model pemograman stokastik multi stage deterministik.
Model MINLP dapat digunakan untuk menemukan desain jaringan yang op-timal dengan nomor yang berbeda dari aliran dalam jaringan pipa. Strategi yang dikemukakan dengan mengandalkan batas pada variabel yang diturunkan seba-gai persamaan umum yang diperoleh dengan pemeriksaan fisik dan menggunakan logika spesifikasi yang dibutuhkan untuk menyelesaikan model.
ABSTRACT
The problem of optimal sintesis of an integrated water system is discussed
in this tesis, where water using processes and water treatment operations are
com-bined into a single network such that the total cost of building the network and
operating it optimally is globally minimized.
The network has to be designed to be feasible and optimal over a given set of
scenarios in which different operational conditions hold. The uncertain operational
parameters in the system are the amount of contaminants generated in the process
units and the extent of removal of the contaminants inside the treatment units.
We optimize a superstructure that incorporates all feasible design
alternati-ves for waste water treatment, reuse and recycle, with a multiscenario nonconvex
mixed integer nonlinear programming model, which is a deterministic equivalent
of a multi stage stochastic programming model with recourse.
The MINLP model can be used to find optimal network designs with different
number of streams in the piping network. In this work, we propose to represent
the bounds on the variables as general equations obtained by physical inspection of
the superstructure and using logic specifications needed for solving the model.
Keyword: Global optimization, Integrated water networks, Nonconvex MINLP,
BAB 1 PENDAHULUAN
1.1 Latar Belakang
Proses Industrialisasi mengkonsumsi sejumlah besar air yang digunakan
un-tuk operasi pembersihan, proses pemisahan, uap dan pembangkit listrik,
pendi-ngin, dan lain lain. Proses ini pada gilirannya menghasilkan sejumlah air limbah,
yang biasanya diproses di unit pengolahan sebelum dikirim ke lingkungan
pembu-angan. Kekurangan air bersih, peningkatan pembiayaan dalam proses pemurnian
air serta peraturan lingkungan yang ketat pada limbah industri, memberikan
mo-tivasi yang kuat untuk mengembangkan teknik dan pendekatan untuk mendesain
proses jaringan air yang lebih efisien.
Dua pendekatan utama untuk disain optimisasi dari sistem jaringan air
ada-lah teknologi pemurnian air dan pemrograman matematika. Sebuah kajian
komp-rehensif dari pendekatan serta metode yang sistematis dari disain diteliti oleh
El-Halwagi (1997), Mann dan Liu (1999), Bagajewicz M (2000), dan Foo (2009).
Gagasan sintesis jaringan air dianalisis oleh El-Halwagi (1997). Setelah
itu pendekatan pencapaian untuk meminimumkan penggunaan air bersih
dikem-bangkan oleh Wang dan Smith (1994a; 1994b, 1995) dan kemudian diperluas dan
diperbarui oleh sejumlah peneliti (Biegler, L. T., Grossmann, I. E. & Westerberg,
A. W. (1997), Doyle & Smith, (1997), Kuo & Smith, (1997), dan Foo, (2009)).
Superstruktur jaringan air terpadu dianalisis oleh Ahmetovic dan
dan operasi pengolahan air limbah dengan asumsi semua koneksi dianggapa layak
termasuk regenarasi air / penggunaan kembali air pada seluruh unit proses dan
unit treatment / pemurnian.
Superstruktur sintesis jaringan air dengan ketidakpastian secara umum
me-rupakan proses dari sejumlah parameter yang dapat berubah sepanjang operasi
suatu proses jaringan pada suatu data yang belum ada kepastiannya. Oleh karena
itu untuk manyatukan suatu jaringan yang beroperasi dengan ketidakpastian
ada-lah dengan mengkonstruksi suatu desain yang layak dan pengoptimalan terhadap
nilai-nilai parameter yang tidak pasti tersebut. Ada dua pendekatan utama untuk
menuju tujuan yaitu didasarkan pada fleksibilitas, dan yang lainnya didasarkan
pada pemograman stokastik dan memastikan kelayakan desain dengan
menyesu-aikan variabel kendala dalam sistem ketika parameter yang tidak pasti tersebut
berubah (Karuppiah dan Grossmann ,2008).
Kedua pendekatan dapat dianggap sebagai model untuk tujuan optimisasi
dan kelayakan secara simultan dicapai. Pada pendekatan pemrograman stokastik
dua tahap langkah pertama yang diperoleh adalah tentang biaya yang diharapkan
dan langkah kedua adalah meminimumkan biaya operasional. Beberapa metode
untuk penyelesaian pemograman stokastik telah diteliti oleh Ahmed S.,
Bersih-malani & Sahinidis, (2004), Norkin, Pflug,& Ruszczynski, (1998), Takriti, Birge &
Louveaux (1996). Suatu tinjauan ulang terbaru tentang teknik untuk optimisasi
dengan ketidakpastian dianalisis oleh Sahinidis (2004).
di-rumuskan sebagai suatu model pemograman multi skenario deterministik untuk
suatu masalah proses sintesis jika parameter yang tidak-pasti merupakan suatu
sa-tuan nilai-nilai terbatas dalam bentuk berikut:
minZd,xn =f
0
(d) +X
n
Pnfn(xn, θn)
dengan kendala
hn(d, xn, θn) = 0
gn(d, xn, θn) ≤ 0
∀n∈N, d∈D, xn∈X, θn ∈θ
dimana
• d berkoresponden dengan variabel disain stage pertama,
• xn adalah vektor dari variabel state pada stage kedua dalam skenario n,
• θn merupakan vektor parameter tidak pasti di dalam skenario,
• pn adalah peluang operasional kejadian skenario n.
Beberapa variabel state merupakan variabel kendali, yang dapat
meng-operasikan jaringan yang beroperasi secara optimisasi ketika parameter yang tidak
pasti berubah. Variabel disain d harus dipilih pada langkah yang pertama dan
tidak bisa diubah pada langkah yang kedua ketika jaringan dioperasikan.
Ba-nyaknya skenario di dalam model diberi oleh |N|. Batasan Persamaan hn secara
normal berkaitan dengan keseimbangan energi dan massa pada setiap skenario.
Ketidaksamaan gn yang diperoleh berkaitan dengan spesifikasi disain dan
P
nPnfn(xn, θn) merupakan ekspektasi total biaya operasi dari sistem untuk
se-mua skenario yang sangat tergantung kepada pemilihan variabel disain stage
per-tama.
1.2 Perumusan Masalah
Model yang telah dikembangkan pada riset terdahulu oleh para peneliti
de-ngan adanya kondisi ketidakpastian hanya mencakup tentang kelayakan desain
jaringan sintesis, Perumusan masalah dalam penelitian ini adalah
mengembangk-an model tidak hmengembangk-anya terhadap desain jaringmengembangk-an tetapi juga mencakup parameter
tidak pasti dalam sistem yang dapat berubah selama operasi proses sintesis.
1.3 Tujuan Penelitian
Tujuan penelitian ini membahas model masalah optimisasi superstruktur
sintesis jaringan air dengan ketidakpastian yang mencakup Model Multiscenario
MINLP untuk fungsi tujuan dan Model MINLP untuk unit mixer, unit splitter
,unit proses dan unit treatment yang memformulasikan keseimbangan material
ke-seluruhan / aliran dan keseimbangan kontaminan yang beroperasi dengan kondisi
operasional tidak pasti.
1.4 Manfaat Hasil Penelitian
Manfaat yang diperoleh dari hasil penelitian ini diharapkan dapat
membe-rikan kontribusi dan manfaat optrimal bagi pihak yang membutuhkannya,
keti-dakpastian dan meminimumkan biaya pada masalah optimisasi global terutama
pada disain dengan ketidakpastian pada superstruktur dari jaringan air terpadu
dengan optimisasi superstruktur sebagai formulasi masalah pemograman nonlinier
integer campuran.
1.5 Metodologi Penelitian
Penelitian ini bersifat studi kepustakaan, mengkaji dan mendalami dari dua
sumber utama yaitu melalui artikel Global optimization of multi skenario mixed
integer nonlinear programming models arising in the synthesis of integrated
wa-ter networks under uncertainty. Compuwa-ters & Chemical Engineering, 32(1-2),
145-160 (Karuppiah dan Grossmann, 2008) dan melalui artikel General
Supers-tructure and Global Optiimization for the Design of Integrated Process Water
Networks , Computers & Chemical Engineering, 14(12) 126-140. (E.Ahmetovic
and Grossmann, 2006), dan juga dengan menelusuri dan menganalisis
bebera-pa buku teks dan journal terkait dengan model pemograman stokastik nonliner
integer campuran dalam menyelesaikan masalah optimisasi suatu superstruktur
sintesis jaringan air dengan ketidakpastian dan melakukan kajian terhadap materi
utama dan pendukung tesis ini dengan pendekatan :
• Telaah riset terdahulu tentang beberapa kajian yang telah dihasilkan dan
dirumuskan oleh para peneliti.
• Formulasikan model pemograman stokastik, pemograman stokastik dua
pemograman stokastik dan rumuskan beberapa definisi dan teorema
terka-it.
• Analisis kajian tentang model Multiscenario MILP untuk Fungsi Tujuan
serta model MINLP untuk Satuan Mixer, Satuan Splitter, Satuan proses,
Satuan Pemurnian / Treatment, Pemotongan Keterikatan Batas, Desain
BAB 2
SUPERSTRUKTUR UMUM DAN OPTIMISASI GLOBAL DESAIN PROSES JARINGAN AIR TERPADU
Pendekatan pemrograman matematika yang didasarkan pada optimisasi
su-perstruktur dari jaringan air diberikan oleh Takama, Kuriyama, Shiroko & Umeda
(1980) dan merupakan sebagai sistem yang terdiri dari air dan air limbah dengan
menggunakan unit treatment/pemurnian. Selain itu superstruktur yang
diha-silkan dari semua kemungkinan serta penggunaan kembali/regenerasi air de-ngan
merumuskan masalah alokasi air yang optimal dalam bidang industri sebagai
ma-salah pemrograman nonlinier. Solusi dari formulasi pemrograman matematika
untuk masalah ini telah diteliti oleh Bagajewicz (2000).
Dalam banyak penelitian, total jaringan air didekomposisi menjadi dua
ba-gian (jaringan dengan menggunakan air dan air limbah pada jaringan operasi
pemurnian) yang diselesaikan secara terpisah. Kuo dan Smith (1997) menyajikan
perluasan metodologi untuk disain sistem terdistribusi pengolahan limbah cair
yang sebelumnya diberikan oleh Wang dan Smith (1994b).
Mereka mempresentasikan suatu peningkatan metode untuk
memformulasi-kan laju aliran dalam proses treatment/pemurnian air dan distribusi beban antara
beberapa proses pengolahan. Selain itu, Galan dan Grossmann (1998) membahas
disain yang optimal dari jaringan air limbah terdistribusi dengan
mempertim-bangkan beberapa kontaminan. Mereka meneliti sebuah prosedur pencarian
heu-ristik yang didasarkan pada penyelesaian terurut model relaksi linier dan mo-del
pendekatan penyelesaian optimisasi global. Selain itu, model ini telah diperluas
untuk memilih teknologi treatment/pemurnian yang berbeda untuk mena-ngani
modul pemisahan membran. Savelski dan Bagajewicz (2003) mengembangkan
kondisi optimisasi yang diperlukan (konsentrasi outlet maksimum dari air-dengan
menggunakan unit dan monotonicy konsentrasi) untuk sistem jaringan air tunggal
dan ganda pada suatu lokasi industri. Mereka menggunakan kondisi ini untuk
me-reduksi bentuk nonlinier dalam model jaringan air yang timbul dalam persamaan
keseimbangan massa dalam bentuk bilinear (konsentrasi kali laju aliran) dengan
menunjukkan bahwa model nonlinier jaringan air untuk komponen tunggal dapat
dilinierisasi.
Quesada dan Grossmann (1995) meneliti suatu prosedur untuk optimisasi
global jaringan proses bilinear dengan aliran multi komponen. Prosedur tersebut
didasarkan pada teknik reformulasi-linearisasi yang diterapkan ke model nonlinier
untuk mendapatkan formulasi pemrograman linier relaksi pada optimisasi global.
Castro, Teles dan Novais (2009) meneliti penyelesaian strategi dua tahap untuk
disain yang optimal dari jaringan air limbah yang didistribusikan dengan beberapa
kontaminan. Pada tahap pertama, metode dekomposisi yang digunakan untuk
menggantikan program nonlinier dengan penurunan program linier untuk setiap
unit pengolahan. Pada tahap kedua, jaringan yang dihasilkan digunakan sebagai
titik awal untuk solusi dari model nonlinier dengan penyelesaian optimal lokal.
Masalah mengkonstruksi total jaringan air telah dibahas oleh Doyle dan
Smith (1997) dengan meneliti suatu metode yang didasarkan pada
Untuk mengatasi kesulitan yang berhubungan dengan model optimasi
nonlini-er, mereka menggunakan model linier untuk memberikan inisialisasi untuk model
nonlinier. Alva-Argez, Kokossis dan Smith (1998) meneliti metodologi terpadu
untuk disain sistem air industri. Strategi dekomposisi mereka didasarkan pada
prosedur rekursif dimana Masalah Integer Campuran Nonlinier (MINLP)
diper-luas menjadi Mixed Integer Linear Programming (MILPs). Huang, Chang, Ling,
dan Chang (1999) meneliti sebuah model matematika untuk memastikan
penggu-naan air yang optimal. Mereka mempresentasikan modifikasi dari superstruktur
yang diteliti oleh Takama, Kuriyama, Shiroko, dan Umeda (1980) dalam
persa-maan model disain semua fasilitas pengolahan air limbah dan semua unit yang
memanfaatkan proses atau utilitas air sehingga diperoleh perbaikan dari disain
pa-da skala besar. Feng pa-dan Seider (2001) meneliti suatu struktur jaringan dengan
sumber air internal yang digunakan yaitu menyederhanakan struktur jaringan
perpipaan serta operasi dan kontrol pada industri besar yang melibatkan proses
penggunaan air. Gunaratnam, Alva-Argaez, Kokossis, Kim, dan Smith (2005)
mempresentasikan disain otomatis sistem distribusi air optimal untuk memenuhi
tuntutan proses dan treatment yang optimal dari aliran limbah cair secara
bersa-maan. Mereka menggunakan pendekatan optimasi dua-tahap untuk memecahkan
model MINLP dengan penggunaan MILP dalam tahap pertama untuk
mengini-sialisasi masalah dan pada tahap kedua dengan menggunakan MINLP. Selain itu,
kompleksitas jaringan dikendalikan dengan memastikan flowrates yang dapat
di-tolerir dalam batas minimum dalam jaringan. Metodologi tersebut menghasilkan
Karuppiah dan Grossmann (2006) membahas masalah sintesis yang
optimi-sasi dari sistem air terpadu yang terdiri dari air yang menggunakan proses dan
operasi pengolahan air. Li dan Chang (2007) mengembangkan suatu strategi
ini-sialisasi efisien untuk memecahkan model NLP dan MINLP untuk jaringan air
dengan beberapa kontaminan. Dalam model MINLP mereka merumuskan
ham-batan struktural untuk memanipulasi kompleksitas structural yang menghasilkan
suatu penyelesaian optimal dengan strategi inisialisasi yang setidaknya sama
ba-iknya dengan hasil yang telah diteliti sebelumnya dengan perhitungan waktu lebih
sedikit untuk mencapai konvergensi. Pada tahun yang sama, Alva-Argaez,
Kokos-sis, dan Smith (2007) meneliti pendekatan sistematis untuk mena-ngani kembali
air di kilang minyak.
Karuppiah dan Grossmann (2008) menyajikan formulasi untuk
mengopti-malkan jaringan air terpadu operasi di bawah kondisi tidak pasti dari beban
kontaminan dalam unit proses dan kepindahan kontaminan dari unit treatment.
Mereka merumuskan multi-skenario nonconvex Model MINLP untuk
mengopti-misasikan sebuah operasi global jaringan air terpadu dengan ketidakpastian.
Se-lanjutnya, mereka meneliti suatu algoritma yang menggabungkan konsep relaksasi
Lagrangian dan relaksasi non konvek untuk menghasilkan batas-batas kuat untuk
optimisasi global.
Sebagian besar analisis didasarkan pada linierisasi model nonlinier, atau
menggunakan model linier untuk memberikan inisialisasi untuk model nonlinier,
BAB 3
PEMROGRAMAN STOKASTIK
3.1 Pengertian Pemrograman Stokastik
Persoalan keputusan dapat dimodelkan dengan menggunakan program
ma-tematik, tujuannya adalah untuk pastikan nilai maksimum atau minimum.
Ke-putusan yang dihasilkan bergantung kepada kendala yang dibatasi oleh sumber
dana, persyaratan minimum dan lain-lain. Keputusan dinyatakan oleh variabel
berupa bilangan cacah atau nonnegatif. Sebagai contoh dari persoalan data
ter-masuk biaya perunit, rata-rata produksi, penjualan atau kapasitas.
Andaikan keputusan dinyatakan dengan variabel (x1, x2, . . . , xn). Sebagai
contoh xi menyatakan produksi ke-i dari n produk. Bentuk umum program
ma-tematikanya adalah :
minZ =f(x)
kendala fi(x)≥bi, i= 1,2, . . . , n (3.1.1)
x≥0, x∈X
dimana X adalah himpunan bilangan real non negatif.
Program stokastik adalah sebuah nama yang menyatakan program
mate-matika yang dapat berupa linear, cacah, cacah campuran, non linear dengan
me-nampilkan elemen stokastik pada data. Sehingga program stokastik dapat dinyata
bahwa :
a. Pada program matematika deterministik, data adalah bilangan-bilangan
b. Pada program stokastik, data merupakan bilangan tidak pasti yang disajikan
sebagai distribusi peluang.
Program stokastik adalah merupakan program matematika, dimana
bebe-rapa data yang termuat pada tujuan atau kendala mengandung ketidakpastian,
ketidakpastian biasanya dicirikan oleh distribusi peluang pada parameter.
Walau-pun ketidakpastian didefinisikan dengan tepat, tetapi pada prakteknya diberikan
beberapa skenario yang spesifik dan distribusi peluang gabungan yang cepat.
Ada dua model dalam permasalahan program stokastik, yaitu :
1. Recourse Models (Model Rekursif)
2. Probabilistically Constrained Models (Model Kendala Berpeluang)
Dalam persoalan program stokastik adalah membuat sebuah keputusan sekarang
dan meminimumkan biaya rata-rata harapan sebagai konsekuensi dari keputusan,
paradigma ini dikenal sebagai modelrecourse. Andaikanxadalah vektor
keputus-an ykeputus-ang diambil, dkeputus-any(w) adalah sebuah vektor keputusan yang menyatakan aksi
terbaru atau konsekuensi dari x. Himpunan berbeda yang berisi y akan dipilih
dari tiap-tiap hasil yang mungkin dari w. Formulasi dua tahapnya adalah
minh1(x) +E[h2 y(w), w
]
kendala
f1(x, y(w)) ≤ 0, ∀w∈W
M M (3.1.2)
fk(x, y(w)) ≤ 0, ∀w∈W
x∈X, y(w)∈Y
dimana himpunan kendalaf1, f2, . . . , fk, menggambarkan hubungan antara
kepu-tusan tahap pertama x dan keputusan tahap kedua y(w). Dicatat bahwa
diper-syaratkan tiap-tiap kendala dipenuhi dengan peluang 1, atau untuk setiapw∈W
yang mungkin. Fungsih2 merupakan penyelesaian yang sering muncul dari
perso-alan matematika. Tidak dibutuhkan untuk membuat korelasi yang berubah-ubah
(recourse) untuk keputusan tahap pertama, perlu untuk dibuat korelasi yang
ter-baik.
Untuk persoalan tahap ganda, pengaruh keputusan sekarang akan ditunggu
untuk beberapa ketidakpastian yang diselesaikan kembali (direalisasikan),
sehing-ga pembuatan keputusan yang lain didasarkan pada apa yang terjadi. Tujuannya
adalah untuk meminimumkan biaya yang diharapkan dari semua keputusan yang
diambil.
Pada beberapa kasus, dapat digunakan suatu model yang lebih tepat
un-tuk mencoba pastikan sebuah keputusan, yang mana keputusan tersebut dijamin
oleh himpunan kendala yang akan dipenuhi oleh sebuah peluang tertentu.
yang dirumuskan sebagai berikut :
minZ =f(x)
kendala P[g1(x)≤0, . . . , gm(x)≤0]≥α
h1(x)≤0 (3.1.3)
h2(x)≤0
x∈X
3.2 Program Stokastik Dua Tahap
Banyak persoalan perencanaan dan manajemen yang mengandung resiko
dan ketidakpastian dibahas dan diselesaikan dengan program stokastik dua
ta-hap. Persoalan stokastik dengan kompensasi dari divergensi pada sistem dengan
kendala mempunyai aplikasi yang lebih banyak dari pada model program yang
lain. Penyelesaian persoalan program stokastik dua tahap berisi vektor acak dan
vektor deterministik. Pada tahap pertama, penyelesaian persoalan rencana awal
deterministik akan dibuat. Pembentukan rencana awal deterministik
dilakuk-an sebelum kondisi acak dari persoaldilakuk-an ditentukdilakuk-an. Sebuah vektor acak pada
penyelesaian persoalan yang sesuai digunakan untuk merencanakan kompensasi
divergensi, spesifikasi parameter dari persoalan akan muncul pada tahap kedua.
Tujuan dari manager pada persoalan di atas adalah meminimum nilai rata-rata
biaya, yang mana tidak hanya termasuk pengeluaran pada tahap perencanaan
pendahuluan tetapi juga pada tahap kedua yang diperlukan untuk
mengkompen-sasi pada divergensi di dalam sistem kendala persoalan. Jika persoalan program
ren-cana awal deterministik akan menjamin keberadaan (eksistensi) vektor acak di
dalam kompensasi untuk sistem yang divergen.
Andaikan terdapat persoalan berikut :
min(C, X) (3.2.1)
A0X =B0 (3.2.2)
AX =B (3.2.3)
X ≥0 (3.2.4)
dimana
C = {cj}, j = 1,2, . . . , m
B = {bi}, i= 1,2, . . . , m
B0 =
b0k , k = 1,2, . . . , m
A0 = a0kj
, k= 1,2, . . . , m; j = 1,2, . . . , n
A = kaijk, i= 1,2, . . . , m; j = 1,2, . . . , n
Andaikan elemen dari matriksA=A(ω), vektorB =B(ω) danC =C(ω) bernilai
acak. Maka untuk proses penyelesaian dari persoalan (3.2.1 - 3.2.4) akan dibagi
menjadi dua tahapan, sebelum pengamatan dari parameter acak pada kondisi
dari tahap pertama dipilih rencana non-negatif deterministik X0 yang memenuhi
kondisi (3.2.2) pada tahap kedua ditentukan spesifikasi ω0
dari setiap kejadian
acak yang bersamaan (sesuai) dengan nilai A(ω0
) dan B(ω0
). Hitung divergensi
B(ω0)− A(ω0)X0 yang muncul pada kondisi (3.2.3) setelah realisasi ω0 ∈ Ω.
berikut
pensasi yang berisi elemen acak. Sehingga diasumsikan bahwa realisasi acak ω
yang diamati pada tahap kedua tidak bergantung pada pemilihan rencana
pen-dahuluan X0.
Perhatikan persoalan program matematika berikut :
Tentukan vektor X berdimensi n dan vektor Y(ω) berdimensi n1, ω ∈ Ω. Yang
menghasilkan
H adalah vektor penalty yang bergantung pada nilai kompoinen dari vektorY(ω)
yang mana merupakan kompensasi divergensi. E adalah notasi ekspekstasi
mate-matika setelah ditentukan rencana awalX0, dipilih komponen vektorY(ω) dengan
cara menjamin penalty minimum untuk kompensasi divergensi pada kondisi dari
persoalan. Dengan kata lain, setelah ditentukan vektor X0, perlu menyelesaikan
Persoalan (3.2.10) akan menpunyai banyak rencana, vektorY(ω) tidak dapat
ditentukan pada tiap ω ∈Ω yang menjamin penemuan kondisi (3.2.8). Persoalan
(3.2.6-3.2.9) dikenal sebagai persoalan program stokastik dua tahap dan persoalan
(3.2.10) adalah persoalan tahap kedua.
Model dan pendekatan dari penyelesaian persoalan program stokastik dua
tahap dapat digunakan untuk perspektif perencanaan dan operasional
manaje-men, karena selalu terdapat keacakan yang mempengaruhi yang sudah
direnca-nakan pada sistem manajemen (pelaksanaan). Model dua tahap juga kurang
sensentif terhadap perubahan pada parameter dari kondisi persoalan, yang
me-nyebabkan lebih stabil. Akibatnya vektor dapat diterima untuk rencana tahap
pertama yang diperlukan untuk setiap ω ∈Ω, terdapat vektor Y ≥0 sedemikian
hingga
D(ω)Y(ω) =B(ω)−A(ω)X (3.2.11)
Andaikan kendala tambahan yang disebutkan secara implisit pada (3.2.11)
muncul pada tahap kedua dari persoalan yang dihasilkan; dan andaikan kondisi
yang ditentukan pada vektor non-negatif X dari persamaan (3.2.7) sudah
diten-tukan.
Andaikan himpunanK1 ={X :A0 =B0, X ≥0}didefinisikan oleh kendala
yang sudah ditentukan tetapi K2 = {X : ∀ω ∈ Ω,∃Y ≥ 0, A(ω)X = B(ω)−
D(ω)Y(ω)} didefinisikan oleh kendala yang dihasilkan. Maka himpunan K =
K1 ∩K2 adalah himpunan vektor X yang layak memenuhi persoalan
A0X
= B, X ≥ 0 dan sampai itu, persoalan tahap kedua (3.2.3) akan memiliki
banyak rencana.
Untuk perhitungan lanjutan diperlukan hasil berikut :
Teorema 3.2.1 HimpunanK dengan vektor X pada persoalan program stokastik dua tahap adalah konveks.
Bukti : K = K1∩K2 tetapi K1 = {X : A0 = B0, X ≥ 0} adalah konveks.
Definisikan untukω ∈Ω yang ditentukan pada himpunanK2ω ={X|∃Y(ω)≥0}
sedemikian hingga A(ω)X = B(ω)−D(ω)Y(ω) adalah konveks. Hal ini
menya-takan bahwa K2 =∩ω∈ΩK2ω dan K =K1∩K2 adalah himpunan konveks sebagi
pertolongan himpunan konveks.
3.3 Pengertian Dasar Program Stokastik Tahap Ganda
Persoalan program stokastik dinamik digeneralisasi oleh kasus dua tahap.
Banyak persoalan praktis yang berupa perencanaan, perancangan dan manajemen
tidak dapat digambarkan dengan bantuan model statis. Untuk model bertujuan,
metode program stokastik tahap ganda seringkali digunakan. Model program
stokastik tahap ganda dan metode untuk realisasi secukupnya bergantung pada
informasi mengenai nilai parameter di dalam kondisi persoalan, dimana memiliki
waktu untuk membuat keputusan selanjutnya. Persoalan dinamik dari tiap-tiap
tahap berurutan disyaratkan untuk melengkapi kompensasi divergensi yang
dikon-disikan oleh kondisi realisasi persoalan dan oleh pembuatan keputusan tercepat
tahap peluang yang memenuhi kendala tidak melebih nilai tertentu yang
diberik-an sebelumnya atas ekspektasi matematika pada fungsi dari divergensi di dalam
kondisi yang dibatasi oleh bilangan yang diberikan atau nilai dari fungsi pada
parameter acak yang direalisasikan pada tahap sebelumnya.
Persoalan dinamik akan memiliki salah satu bentuk yaitu : tidak dapat
di-kondisikan, kondisi probabilistik atau kendala statistik. Untuk persoalan dinamik
dengan kendala tidak dapat dikondisikan, karakteristik keputusan adalah
membu-at pada basis informasi mengenai distribusi yang dikombinasikan oleh parameter
acak dari kondisi pada semua tahapan. Pada persoalan dinamik dengan kondisi
dua kasus kendala dapat dibedakan menjadi : (a) momen pembuatan keputusan
hanya realisasi dari parameter acak pada tahap sebelumnya yang diperkirakan
diketahui dan (b) momen pembuatan keputusan melengkapi informasi yang
ter-sedia mengenai realisasi parameter acak yang dinyatakan dengan tahapan, tetapi
nilai dari parameter acak pada tahapan berurutan tidak diketahui.
Penyelesaian optimisasi untuk persoalan program stokastik dinamik dapat
diperoleh dengan strategi murni atau campuran. Pada komponen kasus akhir dari
penyelesaian atau karakteristik statistik dari distribusi yang memberikan
penye-lesaian akan bergantung pada nilai parameter acak di dalam kondisi persoalan,
yang direalisasikan oleh momen pembuatan keputusan.
Untuk perhitungan selanjutnya dalam analisis persoalan program stokastik
tahap ganda, didefinisikan konsep yang diberikan berikut ini. Andaikan terdapat
ωi, dimana Ω0 berisi satu elemen ω0. Andaikan Ωk adalah descartian product
Ωi, i = 1,2, . . . , k; ωk = (ω1, . . . , ωk), Ωn = Ω dan andaikan pada Ω diberikan
ukuran probabilistikpyang didefinisikan dengan cara : jikaA⊂Ωkmakapk(A) =
p(A×Ωk+1
×. . .×Ωn). Diperkenalkan ruang probabilistik (Ω,Σ, P) dengan P
berkaitan dengan σ-algebra, definisikan Pk sebagai kondisi ukuran probabilistik
pada Ωk
Pk A|ωk−
1
∈B
= Pk(A×B) Pk(Ωk×B)
untuk sembarang A⊂Ωk, B ⊂Ωk−1.
Xkdinyatakan sebagaidescartian productX
i, i= 1,2, . . . , k; Xk= (x1, . . . , xk)
∈ Xk, Xn ≡ X dimana X
0,X1, . . . ,Xn adalah barisan himpunan dari struktur
sembarangXk ∈Xk, k
= 0,1, . . . , ndan himpunan X termasuk satu titik X0.
Andaikan mk diberikan sebagai fungsi vektor pada ϕk(ωk,Xk) berdimensi
untuk setiap ωk ∈ Ωk, Xk ∈ Xk, k = 1, . . . , n dan juga untuk setiap ω ∈ Ω
pada himpunan X fungsi ϕ0(ωn,Xn). Masukkan himpunan acak G0k = G0k(ωk)
danbk(ωk−1)mkfungsi vektorBkdinyatakan sebagai ruang Banach yang termasuk
pada fungsi vektor berdimensibk(ωk−1)Pki=1mi. Akhirnya,Eωk U(ω
k) ωk−1
me-nyatakan kondisi ekspektasi matematika U(ωk) dibawah perkiraan realisasi ωk−1
yang diketahui.
Andaikan dibahas model berbeda pada persoalan program stokastik tahap
Andaikan terdapat persoalan program stokastik tahap ganda :
Eϕ0 = ω
n, Xn)→inf, (3.3.1)
Eϕk = ω
k, Xk)≥b
k (3.3.2)
Xk ∈G
k, k= 1,2, . . . , n (3.3.3)
Untuk memformulasi persoalan secara lengkap, diperlukan titik luar apakah
ken-dala yang tidak dapat dikondisikan atau kondisional, apakah penyelesaian
perso-alan ditentukan dengan strategi murni atau strategi campuran, dan di dalam kelas
fungsi yang terukur atau distribusi yang akan mendapatkan penyelesaian.
Per-soalan praktisnya akan bergantung pada makna isi, penyelesaian pada tiap-tiap
tahap dapat dihitung sebagai vektor deterministik atau sebagai rule-function
pa-da penyelesaian pa-dari realisasi pa-dan parameter acak yang diobservasi pa-dari kondisi,
atau sebagai distribusi pastikan distribusi kontinu Xk dengan perkiraan
infor-masi yang diperlukan mengenai nilai yang direalisasikan data initial acak yang
diperoleh model konkrit untuk persoalan dan struktur informasinya ditentukan
oleh keputusan selanjutnya. Di dalam syarat-syarat yang diajukan oleh Ermolyev
(1970), hasil-hasil persoalan stokastik tahap ganda dari rangkaian tipe
Pengamatan - Keputusan - Pengamatan - . . .- Keputusan
Keputusan - Pengamatan - Keputusan - . . .- Keputusan
dikondi-sikan adalah
Pemilihan beberapa kelas yang paling menarik untuk aplikasi dari sejumlah
struktur informasi yang merupakan persyaratan persoalan program tahap ganda
dengan kendala kondisional. Model kongkrit dari (3.3.1)-(3.3.3) pada kasus
perso-alan dengan kendala kondisional, diselesaikan dengan strategi campuran adalah:
R
Penyelesaian persoalan akan menjadi himpunan fungsi distribusi FXk
|ωk.
Biasa-nya untuk mengatakan persoalan diselesaikan dengan distribusi yang ditentukan
kemudian jika FXk
|ωk didefinisikan setelah realisasi dan pengamatan parameter
acak ωk, distribusi yang ditentukan kemudian bergantung pada Xk−1 dan ωk.
Dikatakan bahwa persoalan yang diselesaikan dengan distribusi yang ditentukan
sebelumnya, jika FXk
|ωk didefinisikan setelah realisasi dan pengamatan ωk−1
te-tapi sebelum pengamatan ωk, distribusi yang ditentukan sebelumnya bergantung
pada Xk−1 dan ωk−1.
strategi murni, model konkrit (3.3.1)-(3.3.3) akan menjadi :
Fungsi Xk dari parameter acak yang direalisasikan dan diamati pada kondisi dari
persoalan merupakan penyelesaian. Persoalan diselesaikan dengan aturan yang
ditentukan kemudian jika keputusan dibuat setelah realisasi dan pengamatanωk;
aturan-aturan yang ditentukan kemudian untuk penyelesaian sedemikian
hing-ga Xk = Xk(ωk). Dikatakan bahwa persoalan diselesaikan dengan aturan yang
ditentukan sebelumnya jika keputusan dibuat setelah realisasi dan pengamatan
ωk−1, tetapi sebelum pengamatan ωk. Pada kasus aturan sebelumnya :
Xk =Xk(ωk−1)
Biasanya, persoalan (3.3.7) - (3.3.9) atau (3.3.10) - (3.3.12) dikenal
seba-gai persoalan stokastik tahap ganda dengan rigid model, jika kondisi (3.3.8) atau
(3.3.11) tidak dihadirkan, keputusan tiap-tiap tahap dibuat setelah observasi
kon-disi dan keputusan pada tahap sebelumnya.
Relasi tertentu yang dimiliki antara determinasi domain untuk persoalan
dengan kendala yang tidak dapat dikondisikan dan kendala yang dapat
dikondi-sikan. Pernyataan berikut akan menggeneralisasi hasil yang diperoleh, yang telah
dikerjakan oleh Eismer (1971) untuk persoalan stokastik tahap ganda parsial
AndaikanU adalah himpunan penyelesaian yang layak untuk persoalan
sto-kastik tahap ganda dengan kendala yang tidak dapat dikondisikan
U ={Xk∈Gi×. . .×Gn
adalah himpunan penyelesaian (aturan penyelesaian, distribusi
sebelum atau sesudah penyelesaian) pada persoalan dengan kendala kondisional.
Teorema 3.3.1 Himpunan U dan V adalah terhubung oleh relasi
U =
domain penyelesaian layak dari persoalan (3.3.4) - (3.3.6) dan (3.3.7) - (3.3.9)
strategi campuran atau strategi murni) bersamaan bentunya jika dan hanya jika
Ebk(ωk−1) =bk.
Pernyataan di atas menyebabkan kemungkinan untuk memformulasi ulang
hasil kualitatif dan seringkali juga menghitung metode yang dikerjakan untuk
persoalan dengan kelas tertentu dan untuk investigasi konstruktif pada persoalan
kelas lain.
Relasi antara distribusi penyelesaian dan aturan penyelesaian sangat
mena-rik. Jika fungsiϕ0 adalah konveks dan komponen fungsi vektor ϕk adalah konkaf
pada X dengan tiap-tiap ω, maka nilai optimisasi dari fungsi objektif yang
dica-pai pada distribusi penyelesaian dapat dicadica-pai juga dengan aturan penyelesaian.
Konveksitas dari ϕ0 dan −ϕk tidak menghabiskan kondisi dengan strategi
opti-misasi murni dan strategi campuran yang didefinisikan menyatu dan nilai sama
dari fungsi tujuan.
Nilai fungsi tujuan untuk aturan optimisasi sebelumnya pada persoalan
sto-kastik tahap ganda di dalam rigid model dengan nilai fungsi tujuan didistribusi
penyelesaian optimisasi sebelumnya.
Pernyataan lebih tegas untuk aturan penyelesaian sesudahnya dan distribusi
penyelesaian diberikan berikut.
Teorema 3.3.2 (a) Andaikan ukuran probabilistik Fω di dalam Ω ≡ Ωn
ada-lah kontinu (b) andaikan terdapat fungsi positif g0(ω) dan gk(ωk) berkendala atas
aturan optimisasi sesudahnya untuk persoalan stokastik tahap ganda didefinisikan
oleh nilai yang sama pada fungsi tujuan sebagai distribusi penyelesaian optimisasi
sesudahnya.
Teorema 3.3.2 untuk persoalan stokastik satu tahap telah dibuktikan oleh Judin
(1972).
Persoalan program stokastik tahap ganda dengan kendala kondisional dapat
disubstitusikan untuk sistem persamaan yang memenuhi pemisahan tahapan.
An-daikan akan dibahas persoalan (3.3.10)-(3.3.12) yang diselesaikan dengan strategi
murni (dengan penyelesaian sebelum aturan penyelesaian sesudahnya).
Untuk definisi domain pada persoalan tahap ke-iberkaitan dengan
himpun-an :
Ki = {Xi ∈G0|∃{yi+1 ∈G0i+1, . . . , yn ∈G0n};
Eωi[ϕi(ωi, Xi)|ωi−1]≥bi(ωi−1),
Eωi+s[ϕi(ωi+s, xi, yi+1, . . . , yi+s)|ωi+s−1]
≥ bi+s(ωi+s−1), (3.3.13)
jika
∀ωi+s−1, . . . , ωn−1, s = 1,2, . . . , n−1}
G0
i menyatakan proyeksiGi terhadap hyper-plane dari kordinat yang
didefi-nisikan oleh komponen vektorXi. Persyaratan keberadaan dari vektoryi+s, s =
1,2, . . . , n−iyang memenuhi kondisi (3.3.13) adalah ekivalen terhadap
menye-lesaikan persoalan (3.3.10)-(3.3.12) adalah kondisiK1 6= Φ (fungsi objektif (3.3.10)
dengan asumsi berkendala). Jika disamping K1 6= Φ, Ki 6= Φ, i= 2,3, . . . , n.
Fungsi tujuan dari persoalan Qi(Xi) pada tahap ke-i mengatakan
kondi-sional ekspektasi matematika ϕ0(ωn, Xn) pada asumsi semua tahapan sebelum
tahap ke-i, himpunanωi−1 merupakan parameter yang direalisasikan dengan
kon-disi persoalan dan komponen keputusan himpunan Xi−1, dan sesudah tahapan
ke-ikeputusan optimisasi berikutnya : X∗
i+1, . . . , Xn∗ :
Qi(Xi) =Eωn
|ωi−1(ωn, Xi−1, Xi, Xi+1, . . . , Xn∗). (3.3.14)
Sejauh ini, definisi penyelesaian aturan optimisasi pada tahap ke-i dari persoalan
stokastik tahap ganda direduksi untuk menyelesaikan persoalan program
mate-matika berikut
inf
Xi∈Xi
Qi(Xi) (3.3.15)
Aturan sesudahnya untuk penyelesaian adalah : Xi =Xi(ωi), yi+s=yi+s(ωi+s); s=
1,2, . . . , n−i, dan aturan sebelumnya untuk penyelesaian adalah :
Xi =Xi(ωi−1); yi+s =yi+s(ωi+s−1); s= 1,2, . . . , n−i.
Jika fungsi tujuan dapat dipisahkan, yaitu ϕ0(ωn, Xn) = Pjn=1ϕ0j(ωj, Xj) kita
mempunyai
Qi(Xi) =Eωi
|ωi−1{ϕ0(ωi, Xi) +Q∗i+1(ωi, Xi)}.
dimana
Q∗i(ωi−1
, Xi−1) = inf
Xi∈Ki
Eωi
|ωi−1{ϕ0(ωi, Xi) +Q∗
i+1(ω
dengan i=n
Analog dengan persoalan pemisahan tahapan untuk persoalan stokastik tahap
ganda dengan strategi campuran yang dikonstruksikan.
3.4 Ilustrasi Pemrograman Stokastik
Banyak persoalan keputusan praktis dapat dimodelkan sebagai program
li-near berikut :
dengan menggunakan notasi matriks-vektor, formulasi dari persoalan (3.4.1)
da-pat dituliskan sebagai :
aplikasi dari persoalan di atas dapat ditemukan pada produksi industri,
trans-portasi, agriculture, energi, ekologi, keteknikan dan banyak lagi. Pada persoalan
(3.4.1), koefisien cj (misalnya faktor harga), aij (misalnya produktivitas) dan bi
(misalnya kapasitas) diasumsikan bernilai real yang sudah ditetapkan dan akan
pastikan nilai optimisasi dengan variabel keputusan xj, yang memenuhi kendala
Model (3.4.1) hanya dapat menghasilkan representasi layak dari persoalan
real ketika fungsi disyaratkan (misalnya fungsi biaya atau fungsi produksi) linear
pada variabel keputusan. Jika kondisi secara substansial dilanggar, sebagai
con-toh karena biaya marginal meningkat atau penurunan keuntungan marginal dari
produksi, dapat digunakan bentuk model yang lebih umum dari persoalan yaitu : min g0(x)
kendala gi(x)≤0, i= 1, . . . , m
x∈X ⊂ R
(3.4.3)
bentuk persoalan (3.4.3) sering dikenal sebagai persoalan program matematika.
Dapat dipahami bahwa himpunan X adalah sebuah fungsi gi : in → i, i =
0,1,2, . . . , m yang diberikan oleh proses pemodelan.
Kebergantungan pada sifat-sifat pada persoalan yang mendefinisikan fungsi
gi dan himpuman X, program (3.4.3) dikenal sebagai :
(a) Linear, jika himpunanXadalahpolyhedral konveksdan fungsigi, i= 0,1, . . . , m
adalah linear.
(b) Nonlinear, jika paling sedikit satu fungsigi, i= 0,1, . . . , madalah nonlinear
atauX tidak himpunanpolyhedral konveks; program nonlinear dapat dibagi
lagi menjadi program :
(b1) Konveks, jika X ∩ {x|gi(x) ≤ 0, i = 0,1, . . . , m} adalah himpunan
konveks dang0 adalah fungsi konveks (secara khusus jika fungsigi, i=
0,1, . . . , m adalah konveks dan X adalah himpunan konveks)
(b2) Nonkonveks, jika salah satuX∩ {x|gi(x)≤0, i= 0,1, . . . , m} adalah
Kasus (b2) di atas dibicarakan juga pada optimisasi global. Kelas spesial lain
dari persoalan dikenal sebagai program bilangan cacah (campuran), yang muncul
akibat disyaratkannya himpunan X (paling sedikit beberapa) variabel xj, j =
1, . . . , n hanya mengambil nilai cacah. Selama empat dekade terakhir,
perkem-bangan metode komputasi untuk menyelesaikan program matematika sangat
meng-gembirakan, dan persoalan berskala besar dapat diselesaikan dengan efisien dan
realibilitas yang tinggi.
Banyaknya situasi pemodel yang sering muncul karena ketidakpastian
(ti-dak pantas) pada asumsi bahwa koefisiencj, aij, bi atau fungsigi (dan himpunan
X) pada persamaan (3.4.1) dan (3.4.3) ditetapkan sebagai deterministik. Sebagai
gantinya produktivitas yang akan datang dalam suatu persoalan produksi, aliran
kedalam yang menuju resorvoir yang terhubung ke stasiun Hydropower,
kebu-tuhan pada bermacam-macam titik (node) dalam jaringan transportasi dan
se-terusnya, seringkali lebih tepat dimodelkan sebagai parameter yang mengandung
ketidakpastian, dimana lebih baik dikarakteristik dengan distribusi peluang.
Ketidakpastian dari nilai realisasi tidak selalu dapat digantikan oleh nilai
rata-rata atau beberapa estimasi lain (yang ditetapkan) selama proses pemodelan.
Karena itu, kebergantungan pada situasi praktis pada persoalan (3.4.1) dan (3.4.3)
tidak selalu mendapatkan model yang tepat untuk menggambarkan persoalan
yang akan diselesaikan. Sebelum masuk ke model yang lebih umum dari program
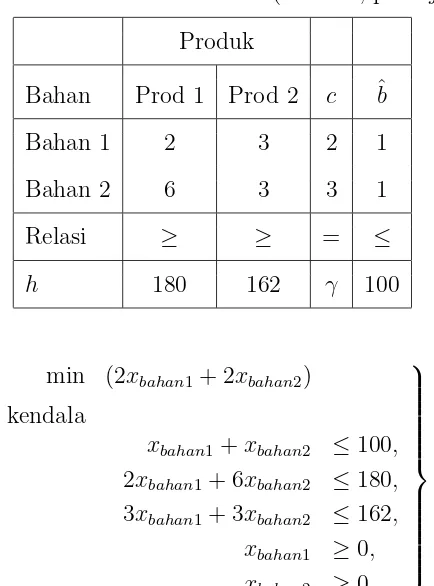
stokastik, akan digunakan persoalan produksi melalui ilustrasi berikut.
Dari dua bahan mentah yaitu bahan 1 dan bahan 2, dapat dihasilkan dua
produk-si berbeda yaitu prod 1 dan prod 2. Biaya produkproduk-si perunit dari bahan mentah
dinyatakan sebagai unit biaya pada bahan mentah c = (cbahan1, cbahan2)T,
kebu-tuhan untuk produksi h= (hprod1, hprod2)T dan kapasitas produksi adalah ˆb yaitu
jumlah total maksimum dari bahan mentah yang dapat diproses, diberikan dalam
Tabel 3.1 .
Tabel 3.1 : Produktivitasπ (bahani, prod j) Produk
Dengan menggunakan metode grafik, diperoleh penyelesaian
ˆ
xbahan1 = 36, xˆbahan2 = 18, γ(ˆx) = 126 (3.4.5)
yang merupakan penyelesaian optimisasi tunggal untuk persoalan diatas.
Persoalan di atas telah digambarkan oleh (3.4.4) dan diselesaikan oleh (3.4.5)
dengan persyaratan produktivitas, biaya perunit, kebutuhan dan kapasitas (tabel
perenca-naan produksi. Seringkali terjadi, beberapa data-produktivitas dan kebutuhan
berubah-ubah (acak). Akibatnya keputusan perencanaan produksi belum dapat
dibuat karena nilai data tidak eksak.
Asumsikan karena disebabkan statistik, diketahui bahwa :
hprod1 = 180 + ˜ζ1,
dimana ˜ζj adalah variabel acak dimodelkan dengan menggunakan distribusi
nor-mal, ˜η1 dan ˜η2 adalah distribusi seragam dan distribusi eksponensial. Dengan
parameter :
untuk sederhananya, diasumsikan bahwa keempat variabel acak adalah saling
in-dependen, karena variabel acak ˜ζ1,ζ˜2, dan ˜η2 adalah tidak terbatas, dibatasi
in-terval kepercayaan 99% (kecuali µ). Sehingga diperoleh variabel acak realisasi ˜
Sebagai ganti dari program linear (3.3.9), diberikan program linear stokastik
Persoalan keputusan di atas, tidak terdefinisi karena semuanya tidak jelas apakah
”min” dapat diperoleh sebelum realisasi (ζ1, ζ2, η1, η2) dari (˜ζ1, ζ˜2, η˜1, η˜2)
diketahui. Sebagai perbandingan, persoalan deterministik dari persoalan di atas
adalah
ˆ
x= (ˆxbahan1,xˆbahan2) = (36, 18), γ= 126
Perencanaan produksinya adalah
ˆ
y= (ˆybahan1, yˆbahan2) = (20, 30), γ = 130,
ˆ
z = (ˆzbahan1, zˆbahan2) = (50, 22), γ = 166,
ˆ
v = (ˆvbahan1, vˆbahan2) = (58, 6), γ = 134,
(3.4.10)
yang merupakan penyelesaian tunggu dan lihat.
Penyelesaian tunggu dan lihat tidak diperlukan karena rencana produksi
mengandung ketidak pastian yang hanya memberikan informasi mengenai
kebu-tuhan dan produktivitas acak. Lebih praktisnya, kita dapat pastikan rencana
produksi untuk meminimumkan jumlah biaya tahap pertama mula-mula (yaitu
produksi) dan biaya recourse rata-rata sebagai ganti dari variabel acak ˜ζ1, ζ˜2, η˜1,
dan ˜η2) digunakan notasi vektor acak ˜ξ = (˜ζ1, ζ˜2, η˜1, η˜2)T . Selanjutnya
diper-kenalkan untuk tiap-tiap kendala stokastik pada (3.4.9) sebuah variabel recourse
yi( ˜ξ), i= 1,2.
Program stokastik pada (3.4.9) akan diubah menjadi program stokastik
h1( ˜ξ) := hprod1 = 180 + ˜ζ1,
0,∀i) maka persoalan (3.4.11) menjadi program linear yang dikenal sebagai
struk-tur dekomposisi dual
Penyelesaian persoalan (3.4.12) adalah sebuah program linear biasa, diperoleh
penyelesaian ¯x
¯
dimana penyelesaian dari PL (3.4.4) akan menghasilkan total biaya rata-rata
γ(¯x) = 204.561 dengan realibilitas yang diperoleh adalah ρ(¯x) = 0.9497 dengan
BAB 4
MASALAH OPTIMISASI SUPERSTRUKTUR SINTESIS JARINGAN AIR DENGAN KETIDAKPASTIAN
Dalam penelitin ini ini analisis sintesis optimisasi jaringan air terpadu
(Ka-ruppiah dan Grossmann, 2006a), dengan menggunakan unit proses (misalnya
reak-tor, unit pembersih), unit pengolahan/pemurnian /treatment air (misalnya
mem-bran, sentrifus), mixer dan splitter yang beroperasi dengan kondisi operasional
ti-dak pasti secara sistematis menganalisis semua disain alternatif dan superstruktur
sistem air terpadu yang dikonstruksi dengan berbagai interkoneksi antara semua
unit dan optimisasi global untuk memperoleh jaringan dengan biaya minimum.
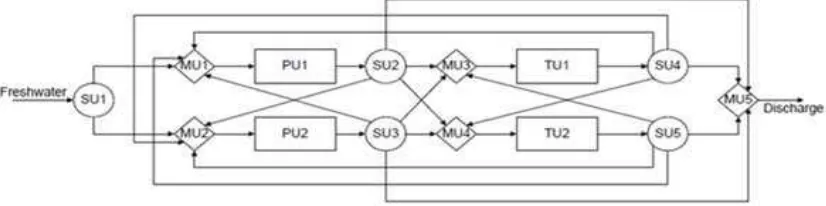
Ilustratif superstruktur jaringan air dengan dua unit proses dan dua unit
pemurnian ditunjukkan pada Gambar. 1 .
Gambar 1 : Superstruktur jaringan terpadu dengan 2 unit Proses dan 2 unit Pemurnian air
Sebuah penjelasan rinci untuk menurunkan superstruktur jaringan air
ter-padu dianalisis oleh Karuppiah dan Grossmann (2006a). Ide dasarnya adalah
bahwa ada satu bahagian air menggunakan unit proses dengan aliran air tetap
yang dipenuhi oleh sumber air bersih atau air limbah yang berasal dari suatu
pro-ses yang memenuhi batasan yang ditolerir tentang jumlah konsentrasi kontaminan
Air limbah yang dihasilkan oleh suatu proses diperlakukan dalam satu set
unit pengolahan air untuk dibuang ke tempat pembuangan limbah atau kembali
diproses / dimurniklan / daur ulang untuk digunakan kembali dengan
menggu-nakan suatu operasi.
Tingkat kontaminan dalam debit aliran berada pada ambang batas yang
ditentukan. Proses jaringan air terpadu mempunyai parameter tidak pasti dalam
kadar kontaminan yang dihasilkan di dalam unit proses dan rasio penghapusan
kontaminan dalam unit pemurnian.
Parameter tidak pasti terdapat pada nilai-nilai yang berbeda pada titik
wak-tu yang berbeda selama operasi jaringan. Karena jaringan terpadu saling
ber-hubungan, maka perubahan dalam parameter tidak pasti dapat mempengaruhi
semua bagian dari jaringan dan tidak mungkin untuk mengoperasikan jaringan
tanpa melanggar pembatasan debit atau tingkat kontaminan dalam saluiran ke
unit proses. Untuk menghindari situasi ini, efek dari ketidakpastian dalam beban
kontaminan dan perubahan kontaminan aliran diperhitungkan pada saat
meran-cang jaringan. Oleh karena itu perumusan masalah disain merupakan masalah
pemrograman stokastik two - stage / dua tahap dengan stage pertama adalah
pe-milihan jaringan dan stage kedua pengoperasian jaringan yang bertujuan untuk
mengkonstruksi suatu jaringan dengan biaya minimal.
Stage pertama biaya modal termasuk biaya investasi untuk pipa yang
ter-gantung pada laju aliran maksimum yang dapat dialiri dalam pipa, dan biaya
limbah aliran ditangani oleh unit pengolahan. Biaya operasi jaringan muncul pada
stage kedua, yang meliputi biaya memperoleh air bersih untuk digunakan dalam
unit proses, biaya memompa aliran tertentu air melalui pipa-pipa (volume aliran
ini kurang dari volume aliran maksimum yang dapat dilalui dalam pipa-pipa) dan
biaya operasi pengolahan limbah cair di unit pemurnian.
Keputusan yang berkaitan dengan stage pertama diambil sebelum
muncul-nya ketidakpastian dalam sistem,
(i) Apakah sambungan pipa aliran ada antara dua potong peralatan,
(ii) Laju aliran air maksimum yang dapat dilalui dalam pipa masing-masing
dan,
(iii) Volume maksimum air limbah untuk dibersihkan di setiap unit pemurnian.
Keputusan ini sesuai dengan variabel desain dalam masalah dan sekali
di-pilih, variabel desain tersebut tetap sepanjang durasi operasi jaringan dan tidak
dapat diubah selama operasi. Keputusan stage kedua adalah aliran air yang akan
dipompa melalui pipa masing-masing dalam jaringan air bersih untuk
dipenggu-naan pada berbagai waktu selama operasi. Perubahan selama operasi jaringan
tergantung pada nilai-nilai yang diambil oleh parameter tidak pasti.
4.1 Model Multiscenario MINLP
Model matematika jaringan yang beroperasi dengan ketidakpastian dalam
sistem melalui penggunaan skenario. Operasi jaringan dibagi atas skenario yang
nilai-nilai yang berbeda yang dikenal [N]. Persamaan model aliran memastikan bahwa
aliran residu / sisa di setiap unit aliran memegang dalam skenario setiap dan juga
konsentrasi kontaminan dalam aliran debit dan di aliran aliran masuk ke aliran
unit proses aliran mengalir dengan batas yang ditentukan dalam masing-masing
skenario. Beberapa asumsi yang terlibat dalam pemodelan sistem tersebut adalah:
A. Total laju aliran sungai dianggap sama dengan air murni dalam aliran
de-ngan aliran kontaminan individu diabaikan (level ppm).
B. Tidak ada kehilangan air di dalam unit proses atau unit pengolahan
C. Jaringan ini dioperasikan dengan kondisi isotermal dan isobar.
4.1.1 Fungsi Tujuan
Perluasan formulasi nonkonvek NLP untuk sintesis jaringan air terpadu
me-rumuskan model multi skenario MINLP. Fungsi: tujuannya adalah untuk
memi-nimalkan jumlah biaya modal (dikeluarkan hanya sekali pada saat membangun
jaringan) dan biaya operasi dari jaringan yang dikeluarkan selama setiap skenario
n ∈N. Fungsi Tujuan diberikan sebagai berikut :
minZp = AR
CF W = Biaya air bersih ($ /ton)
AR = Annualized faktor untuk investasi pada unit pemurnian dan pipa(/tahun)
Ci
p = koefisien Biaya sesuai dengan keberadaan pipa i($)
F Wn = Air Bersih asupan ke dalam sistem dalam skenario n (ton / jam)
IPi(Fi) = Biaya investasi pipa i ($)
ICt(Fi)α= InvestasiiF biaya t unit pengolahan dengan aliran keluar i ($)
P MiFi
n = Biaya memompa air di dalam pipa idi n skenario ($ /jam) nF
OCtFi
n = Biaya operasi darit unit pengolahan dengan aliran keluar i($ jam)
Pn = Probabilitas terjadinya skenarion
$ = Satuan Biaya.
Variabel biner disain yiberkaitan dengan keberadaan aliran / pipa i
perta-ma, variabel kontinu stage pertama merupakan aliran maksimum yang ditolerir
dalam sebuah pipai sementara vektorFi
n adalah variabel state stage kedua, yang
sesuai dengan aliran air dalam pipa i selama skenario n. Variabel state stage
ke-dua secara implisit tergantung pada variabel disain stage pertama, dan karenanya
biaya operasi stage kedua juga secara implisit tergantung pada keputusan stage
pertama.
merupakan biaya modal stage pertama :
merupakan ekspektasi biaya operasi stage kedua.
4.2 Model MINLP
4.2.1 Satuan Mixer
Keseluruhan aliran menyeimbangkan dengan keseimbangan kontaminasi
in-dividu untuk suatu satuan mixerm∈M Udengan himpunan aliran masuki∈min
, dan suatu aliran keluar k∈mout disajikan dalam persamaan (4.2.1) dan (4.2.2).
Persamaan (4.2.2) memuat suku-suku bilinier yang merupakan suatu sumber
non-konvekas sdari model optimisasi. Aliran keseimbangan diperoleh pada setiap
ske-nario n ∈ N dan Ci
jn merupakan konsentarsi kontaminasi j (dalam ppm) dalam
aliran I pada skenario n
Fnλ = X
i∈min
Fni ∀m∈M U, k∈mout, ∀n ∈N (4.2.1)
FnλCjnλ = X
i∈min
FniCjni ∀j, ∀m∈M U, k∈mout, n ∈N (4.2.2)
Semua aliran{Fni}dan konsentrasi kontaminasi {Cjmi }dalam sistem adalah
non-negative dengan batas tertentu.
4.2.2 Satuan Splitter
Splitter satuans∈SU konsisten dari suatu aliran masukk ∈sin dan suatu
himpunan aliran keluar i yang dinotasikan dengan himpuan sout. Keseluruhan
ske-nario diberikan dalam persamaan (4.2.3) dan (4.2.4), yaitu
FRK = X
i∈sout
FRI ∀s ∈SU, k ∈Sin, ∀n ∈N (4.2.3)
Cjnj = Ck
jn ∀j, ∀s∈SU, ∀i∈sout, k ∈sin, ∀n∈N (4.2.4)
4.2.3 Satuan Proses
Persamaan keseimbangan aliran untuk setiap skenario satuan prosesp∈P U
dengan suatu aliran masuk i ∈ pin dan aliran keluar k ∈ pout yang ditunjukkan
persamaan (4.2.5) dan (4.2.6), dimana persamaan (4.2.5) berkaitan dengan
ke-seluruhan keseimbangan aliran tersebut dan persamaan (4.2.6) berkaitan pada
keseimbangan komponen individual. Proses setiap kontaminasi j dalam satuan
proses diberikan oleh Lpj(dalam kg/jam) merupakan suatu sumber ketidak
pas-tian dalam jaringan dan mempunyai nilai berbeda dalam setiap scenario n yang
dinyatakan dalam bentuk persamaan :
Fnk =Fni =Pp ∀p∈P U, i ∈Pin, k∈Pout, ∀n ∈N (4.2.5)
PpCjni +Lpjn×103 =PpCjnk ∀j, ∀p∈P U, i ∈Pin, k∈Pout, ∀n ∈N (4.2.6)
4.2.4 Satuan Pemurnian
Persamaan (4.2.7) dan (4.2.8) menguraikan keseimbangan aliran dan
ke-seimbangan konsentrasi kontaminasi, untuk semua skenario untuk suatu satuan
keluar i∈tout
Fnk = Fni ∀t∈T U, i ∈tout, k∈tin, ∀n ∈N (4.2.7)
Cjnj = βjnk Cjnk ∀j, ∀t ∈T U, i ∈tout, k ∈tin, ∀n ∈N (4.2.8)
Perbandingan penghapusan kontaminasi di dalam satuan pemurnian adalah
berbeda pada setiap skenarion. Parameterβi
j = 1−{(perbandingan penghapusan
untuk contaminant j di dalam satuan t (dalam %/100)) dan ini diperoleh pada
perbedaan nilai dalam setiap skenarion(βi
jn)}. Semua parameter yang tidak pasti
di dalam sistem diasumsikan bebas antara satu dengan lainnya.
4.2.5 Pemotongan Keterikatan Batas
Dengan menambahkan batasan persamaan (4.2.9) terhadap model yang asal
berdasarkan pada keseimbangan kontaminasi untuk keseluruhan sistem dalam
rangka memperkuat relaksasi yang konvek dari model multi skenario MINLP
(Ka-ruppiah & Grossmann, 2006a)
n dan Cjnout merupakan flow dan konsentrasi contaminant j di dalam
aliran keluar pada lingkungannya di dalam skenario n.
4.2.6 Desain Kendala
Batasan ini menghubungkan variabel disain yi dan ˆFi yang ditunjukkan
persamaan berikut
Yang mengimplementasikan bahwa jika suatu pipa ada, aliran maksimum di
da-lamnya merupakan suatu nilai antar batas tertentu dan jika tidak demikian
flo-wrate maksimum di dalam pipa mendekati kosong.
4.2.7 Hubungkan Batasan
Batasan keras [hard] yang menghubungkan variabel dari tiap skenario
de-ngan variabel disain diberikan dalam persamaan (4.2.11). Secara phisik, batasan
variabel disain ˆFi yang merupakan aliran maksimum bisa dilalui suatu pipa i,
harus lebih besar dari aliran di dalam aliran yang melewati pipa idi dalam setiap
skenario n ∈N (yang dinotasikan denganFi n)
ˆ
Fi ≥Fni ∀i, ∀n ∈N (4.2.11)
Model Multi skenario MINLP meliputi persamaan (4.1.1)-(4.2.11)
merupak-an bentuk optimisasi global dmerupak-an penyelesaimerupak-an model ini merupakmerupak-an nilai dari
vari-abel disain yang menggambarkan Jaringan topologi dan juga merupakan varivari-abel
control (Fi
n ∀i, ∀n∈N) yang merupakan aliran air untuk dipompa pada setiap
pipa i, di dalam setiap skenario n. Nilai-Nilai variabel state yang merupakan
konsentrasi kontaminasi dalam semua aliran dalam jaringan etiap scenario juga
BAB 5
KESIMPULAN DAN RISET LANJUTAN
5.1 Kesimpulan
Model Multiscenario MINLP merupakan model yang tepat untuk dapat
di-aplikasikan dalam fungsi tujuan dalam masalah optimisasi superstruktur jaringan
air tepadu dengan ketidakpastian sedemikian dapat meminimalkan total
pembia-yaan dan model MINLP untuk keseimbangan aliran / material keselutuhan serta
keseimbangan kontaminan dalam Unit Mixer, Splitter, Proses dan Treatment /
Pemurnian. Pemilihan desain superstruktur jaringan air terpadu dapat
memini-malkan total pembiayaan yang diproses dalam unit pemurnian / treatment untuk
operasi penggunaan air.
5.2 Riset Lanjutan
a. Untuk menindak lanjuti hasil penelitian ini disarankan untuk
mengkonstruk-si model sebuah jaringan yang berfungmengkonstruk-si ganda dengan regeneramengkonstruk-si industri
penggunaan air dan pengolahan air limbah dan air dalam penyimpanan
(reservoir) dalam integrasi langsung. Selain itu, beberapa utilitas jaringan
mungkin berfungsi sebagai regenerasi air dalam induistri yang dapat
difor-mulasikan dalam model tersebut.
b. Pengembangan model desain jaringan untuk fleksibilitas dengan
ketidakpas-tian yang terdapat dalam skenario dapat dimasukkan ke dalam model
de-ngan menggunakan fuzzy atau stokastik parameter dimana Interplant