SECARA FAULT TOLERANCE
PADA INKUBATOR BAYI BERBASIS MIKROKONTROLER
PRIMA ANDIKA
Skripsi
Sebagai Salah Satu Syarat untuk Mencapai Gelar SARJANA TEKNIK
Pada
Jurusan Teknik Elektro Fakultas Teknik Universitas Lampung
FAKULTAS TEKNIK
UNIVERSITAS LAMPUNG
PERANCANGAN PENGENDALI SUHU SECARA FAULT TOLERANCE PADA INKUBATOR BAYI BERBASIS MIKROKONTROLER
Oleh
PRIMA ANDIKA
Bayi yang baru lahir, baik bayi yang lahir dengan berat lahir rendah (BBLR) ataupun bayi yang lahir normal belum mampu mempertahankan suhu badannya. Salah satu prosedur standar pasca neonatal adalah semua bayi yang baru lahir harus dimasukkan ke dalam inkubator, jangka waktu yang dibutuhkan tergantung dari tingkat kesehatan, daya tahan dan sistem organ bayi itu sendiri. Rata-rata suhu dalam inkubator bayi adalah hampir sama dengan suhu kandungan (28oC – 38oC).
Penentuan set point suhu berdasarkan pada berat badan dan umur bayi, suhu yang direkomendasikan antara 32oC - 36oC. Pemanas yang digunakan berupa tiga buah lampu pijar yaitu 100 watt, 60 watt, 60 watt, dua buah sebagai pemanas utama dan satu pemanas pengganti (backup). Waktu yang dibutuhkan dalam proses pemanasan suhu di dalam inkubator bayi mulai dari suhu ruang di dalam inkubator bayi hingga mencapai suhu set point 32oC sebesar 8.25 menit, sedangkan untuk kenaikan suhu pada masing-masing set point yang berbeda-beda hingga mencapai suhu stabil yaitu rata-rata 1oC/4 menit. Kestabilan suhu inkubator bayi ini dapat dipertahankan dengan baik selama 5 jam dengan masing-masing set point suhu inkubator bayi selama satu jam tanpa melebihi batas ralat yaitu ± 1°C dari suhu setelan yang dikehendaki.
Fault tolerance pada inkubator bayi ini berfungsi untuk melanjutkan kerja dari pemanas yang tidak berfungsi, dimana sistem bekerja pada kondisi disaat pemanas mati yaitu dengan ditandai waktu yang dibutuhkan melebihi batas waktu pada kondisi normal, serta ditambahkan suplai cadangan untuk kondisi saat suplai utama padam.
DAFTAR ISI
a.Spesifikasi Mikrokontroler ATmega16 ... 18
b. Konfigurasi Pin ATmega16 ... 19
C. Spesifikasi Rancangan Alat... 28
D. Prosedur Kerja ... 29
1. Penentuan Spesifikasi Rancangan ... 30
2. Perancangan Perangkat Keras (Hardware) ... 34
IV. HASIL DAN PEMBAHASAN
A. Perangkat Keras ... 41
1. Pengendali Utama ... 41
2. Sensor Suhu LM35 ... 42
3. Liquid Crystal Display(LCD) ... 44
4. Driver Pemanas dan Fan ... 45
5. Power Suply ... 48
6. Keypad ... 49
B. Perangkat Lunak... 50
C. Pengujian Alat ... 56
1. Prosedur Penggunaan Alat ... 56
2. Data Pengamatan ... 59
3. Pengujian Fault Tolerance ... 67
V. SIMPULAN DAN SARAN A. Simpulan ... 69
B. Saran ... 70
I. PENDAHULUAN
A. Latar Belakang
Sistem kendali secara otomatis di bidang ilmu pengetahuan dan teknologi
belakangan ini berkembang dengan pesat. Dengan adanya kemajuan di bidang
ilmu pengetahuan dan teknologi menghasilkan inovasi baru yang berkembang
menuju lebih baik, dan salah satunya dalam bidang kesehatan yaitu dengan
dibuatnya inkubator bayi yang berfungsi menjaga temperatur bayi agar tetap
hangat.
Bayi yang baru lahir, baik bayi yang lahir dengan berat lahir rendah (BBLR)
ataupun bayi yang lahir normal belum mampu mempertahankan suhu badannya,
dan membutuhkan waktu untuk beradaptasi dengan dunia luar[1]. Salah satu
prosedur standar pasca neonatal adalah semua bayi baru lahir harus dimasukkan
ke dalam inkubator, jangka waktu yang dibutuhkan tergantung dari tingkat
kesehatan, daya tahan dan sistem organ bayi itu sendiri.
Bayi prematur adalah bayi yang lahir dalam kondisi yang tidak normal, dengan
disebabkan karena umur kandungan yang belum mencapai masa kelahiran atau
berat badan saat kelahiran di bawah rata-rata bayi normal. Pada proses kelahiran
prematur, temperatur kulit bayi dan suhu badan cenderung mengalami penurunan,
dengan bayi lebih dingin, hilangnya panas di udara karena pergerakan bayi,
hilangnya panas ke obyek yang lebih dingin yang bukan kontak langsung dengan
bayi, dan hilangnya panas dari permukaan kulit dan paru-paru sehingga
diperlukan proses adaptasi lingkungan di luar rahim dalam kondisi yang
terkontrol. Bayi prematur harus dirawat secara intensif dalam sebuah inkubator
bayi. Prinsip dasar dari inkubator bayi adalah sebagai alat yang berfungsi untuk
memberikan suhu tertentu kepada bayi yang baru lahir (terutama bayi prematur
dan bayi normal yang memiliki berat badan kurang dari standar). Bayi dalam
kondisi tersebut masih memerlukan suhu yang rata-rata sama dengan suhu
kandungan ibu mereka karena bayi prematur tidak bisa beradaptasi dengan suhu
di lingkungan sekitar yang relatif lebih rendah. Di dalam inkubator, bayi akan
memperoleh lingkungan dengan suhu sama dengan lingkungan di dalam
kandungan ibunya yaitu sekitar 28°C – 38°C.
Saat ini masih terdapat klinik-klinik persalinan atau puskesmas yang masih
menggunakan inkubator bayi dengan sistem konvensional dan masih kurangnya
jumlah kepemilikan inkubator. Hal ini disebabkan harga inkubator yang
berteknologi tinggi belum terjangkau dan masalah pendistribusian ke
daerah-daerah terpencil di Indonesia menyebabkan turunnya kualitas pelayanan dalam
perawatan bayi baru lahir.
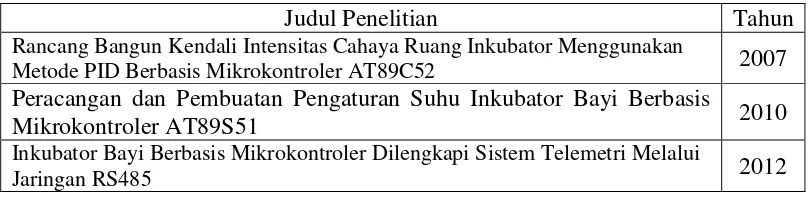
Tabel 1. Daftar Judul Penelitian
Judul Penelitian Tahun
Rancang Bangun Kendali Intensitas Cahaya Ruang Inkubator Menggunakan
Metode PID Berbasis Mikrokontroler AT89C52 2007
Peracangan dan Pembuatan Pengaturan Suhu Inkubator Bayi Berbasis
Mikrokontroler AT89S51 2010
Inkubator Bayi Berbasis Mikrokontroler Dilengkapi Sistem Telemetri Melalui
3
Penelitian mengenai pengendalian suhu pada inkubator bayi sudah banyak
dilakukan seperti pada tabel di atas, namun dari beberapa penelitian tersebut
hanya mengendalikan suhu agar sesuai dengan set point dan tidak memperhatikan
faktor kegagalan kerja dari sistem yang ada atau kerusakan dari komponen
pengendali tersebut. Oleh karena itu perlu direalisasikan adanya inkubator bayi
yang mampu bekerja secara otomatis dengan pengendalian suhu secara fault
tolerance dan harga terjangkau (tanpa mengurangi aspek tepat guna) dengan
mengadaptasi beberapa keunggulan teknologi dari inkubator buatan luar negeri,
dengan harapan inkubator tersebut dapat digunakan untuk semua kalangan.
Fault tolerance adalah suatu sistem yang dapat melanjutkan tugasnya dengan
benar meskipun terjadi kegagalan perangkat keras (hardware failure) dan
kesalahan perangkat lunak (software error). Fault tolerance dapat dicapai dengan
banyak teknik, salah satunya adalah mendeteksi dan melokasikan fault yang
terjadi dan rekonfigurasi sistem untuk mengganti komponen yang rusak.
Rekonfigurasi adalah proses penghilangan bagian sistem yang rusak dan
memperbaiki sistem pada kondisi atau keadaan operasional. Salah satu proses
yang diperhatikan dalam rekonfigurasi adalah Fault recovery. Fault recovery
adalah proses dari penetapan operasional atau perolehan kembali status
operasional lewat rekonfigurasi jika sekiranya ada fault.
Berdasarkan permasalahan di atas, penulis dalam tugas akhir ini akan merancang
dan membuat piranti pengendali suhu secara fault tolerance pada inkubator bayi
B. Tujuan Penelitian
Adapun tujuan dari penelitian ini adalah:
1. Dapat mendesain dan membuat sebuah inkubator bayi kontrol otomatis
dengan pengaturan suhu secara fault tolerance.
2. Memperbarui sistem pengaturan suhu konvensional dengan penambahan
sistem secara fault tolerance.
C. Manfaat Penelitian
Adapun manfaat dari penelitian ini adalah:
1. Penggunaan sistem fault tolerance dapat dijadikan salah satu teknik untuk
mendapatkan sistem pengendalian yang mampu bekerja meskipun terdapat
kegagalan.
2. Dengan adanya perancangan ini diharapkan dapat memberikan masukan
mengenai desain inkubator bayi dengan pengaturan suhu secara fault
tolerance.
D. Rumusan Masalah
Masalah yang akan dihadapi dalam perancangan ini antara lain:
1. Bagaimana jika pemanas terjadi kerusakan atau kegagalan kerja.
2. Bagaimana jika kondisi suplai listrik utama mati.
3. Pengendali suhu yang digunakan.
E. Batasan Masalah
Pembatasan masalah dalam penelitian ini adalah:
1. Pembacaan suhu menggunakan sensor LM35 dan pemanas menggunakan
5
2. Suhu ruang inkubator bayi antara 28 – 38oC.
3. Ukuran inkubator bayi yang digunakan dengan ukuran dan bentuk
modifikasi.
F. Hipotesis
Sesuai dengan prinsip dasar dari inkubator bayi adalah sebagai alat yang berfungsi
untuk memberikan suhu tertentu kepada bayi yang baru lahir (terutama bayi
prematurdan bayi normal yang memiliki berat badan kurang dari standar) dengan
menjaga suhu tubuh bayi tetap hangat, maka inkubator bayi ini diharapkan:
1. Dapat melanjutkan kerja meskipun terjadi kegagalan kerja dari pemanas,
yaitru ditandai dengan berfungsinya pemanas cadangan.
2. Mampu mempertahankan suhu di dalam ruangan inkubator bayi tetap
stabil dengan range antara 28 – 38 oC.
G. Sistematika Penulisan
Adapun sistematika penulisan dalam penyusunan skripsi ini adalah sebagai
berikut:
BAB I: PENDAHULUAN
Bab ini berisi latar belakang, tujuan penelitian, manfaat penelitian, rumusan
masalah, batasan masalah, hipotesis dan sistematika penulisan.
BAB II: TINJAUAN PUSTAKA
Bab ini berisi tentang teori-teori yang menjelaskan tentang Inkubator bayi,
BAB III: METODOLOGI PENELITIAN
Memuat langkah-langkah yang dilakukan pada penelitian, diantaranya waktu dan
tempat penelitian, alat dan bahan, komponen dan perangkat penelitian, prosedur
kerja, perancangan, dan pengujian sistem.
BAB IV: HASIL DAN PEMBAHASAN
Pada bab ini berisi tentang analisa dan pengolahan dari data yang didapatkan saat
melakukan pengujian.
BAB V: SIMPULAN DAN SARAN
Pada bab ini berisi tentang rangkuman hasil penelitian yang telah diuraikan dalam
bab sebelumnya serta saran-saran terkait hasil penelitian yang diperoleh.
DAFTAR PUSTAKA
II. TINJAUAN PUSTAKA
A. Inkubator Bayi
Inkubatorbayi adalah sebuah ruang kotak atau bok yang tertutup dengan suhu
yang selalu dijaga agar tidak melebihi batas. Rata-rata suhu dalam inkubatorbayi
adalah hampir sama dengan suhu kandungan ibu (28 – 38oC) karena bayi yang
baru lahir masih belum siap beradaptasi dengan suhu lingkungan luar. Inkubator
bayi berfungsi menjaga temperatur bayi supaya tetap stabil (36,5 –
37,5oC)[1].Inkubatorbayi diciptakan karena banyak proses persalinan bayi yang
belum siap beradaptasi dengan suhu sekitar yang lebih rendah dari pada suhu
kandungan ibu. Terutama untuk bayi yang dilahirkan dalam keadaan
prematuryaitu bayi yang lahir kurang bulan menurut masa gestasinya (usia
kehamilan).
Seperti bayi normal, bayi prematur juga memperoleh kekebalan tubuh dari ibunya.
Tapi, pada bayi prematur kekebalan yang didapat lebih sedikit daripada bayi
normal, karena sebelum daya tahan itu terbentuk cukup, ia sudah harus dilahirkan.
Inilah yang menyebabkan bayi prematur sangat rentan terhadap penyakit infeksi.
Di rumah sakit, bayi yang lahir prematur akan diletakkan dalam alat khusus, yaitu
inkubator. Inkubator merupakan alat yang dilengkapi dengan pengatur suhu dan
badan <1500 gram, maka suhu dalam inkubator harus berkisar antara
35oC.Apabila berat badannya antara 1500 - 2000 gram, suhu inkubator harus
sekitar 34oC.Dan apabila berat badannya antara 2100 - 2500 gram, suhu inkubator
harus sekitar 33oC.Suhu inkubator akan diturunkan secara bertahap setiap 10-14
hari sebanyak 1oC, sehingga akhirnya bayi bisa menyesuaikan diri dengan
lingkungan luarnya[4].
Selain berfungsi sebagai penghangat, inkubator juga berfungsi melindungi bayi
dari bahaya infeksi. Di tempat ini, tersedia juga alat penyinaran sinar biru bagi
bayi prematur yang mengalami peningkatan kadar bilirubin dalam darahnya (bayi
kuning/jaundice) sebagai akibat hati bayi yang belum bekerja sempurna.Biasanya,
bayi dalam inkubator akan dibiarkan telanjang untuk mempermudah pemantauan,
yang bisa dilihat dari gerak pernafasan serta warna kulit. Dengan demikian, bila
ada kelainan bisa segera diketahui.
Range pengaturan suhu pada Inkubator bayiyaitu berkisar antara 28 – 38oC.
A B
9
Pada gambar di atas dapat dilihat model dari inkubator bayi yang saat ini
digunakan pada beberapa instansi kesehatan khususnya pada rumah sakit atau pun
klinik persalinan.Pada gambar A merupakan inkubator bayi yang sudah
menggunakan teknologi yang memadai dengan bentuk dan kontrol otomatis serta
dengan tingkat keakuratan yang baik, namun pada gambar B merupakan inkubator
bayi konvensional dimana pengontrolan suhu masih bersifat manual dan dengan
teknologi yang kurang memadai.
B. Fault Tolerance
Fault tolerance adalah suatu sistem yang dapat melanjutkan tugasnya dengan
benar meskipun terjadi kegagalan perangkat keras (hardware failure) dan
kesalahan perangkat lunak (software error). Fault tolerancemerupakan
perlengkapan yang memungkinkan sistem untuk mencapai operasi fault-tolerant.
Istilah fault-tolerant komputing menggambarkan proses pelaksanaan perhitungan
seperti yang dilakukan komputer, dalam carafault-tolerant.
Fault tolerance adalah sistem perlengkapan yang dirancang didalam suatu sistem
untuk mencapai tujuan perancangannya. Sebagai rancangan maka harus
sesuaidengan fungsi dan tujuan kerjanya, hal ini memerlukan pemenuhan
kebutuhan lain.Ada tiga istilah pokok dalam rancangan fault tolerance yaitu, fault,
error,dan failure.Ketiganya mempunyai hubungan sebab dan akibat.Tegasnya,
faultadalah penyebab error, dan error adalah penyebab failure. Fault (kerusakan)
adalah kerusakan fisik, ketidak sempurnaan, ataukerusakan yang terjadi di dalam
antara konduktor listrik, open atau break dalam konduktor,atau kerusakan fisik
atau ketidaksempurnaan dalam device semikonduktor. Demikianjuga pemakai
ingin membuat katup off, sistem akan mengalami kegagalan.Fault dapat
disebabkan oleh bermacam-macam hal yang terjadi di dalamkomponen
elektronika, diluar komponen, atau selama komponen tersebut atau
prosesperancangan sistem. Hal ini sangat penting untuk memahami semua
kemungkinanpenyebab fault. Untuk memahami bermacam-macam penyebab
fault, kita pertama-tamamemeriksa proses rancangan khusus untuk
mengidentifikasi bidang-bidang dimana fault dapat terjadi.
Kemungkinan penyebab fault dapat dihubungkan dengan permasalahanpada
empat bidang dasar yaitu : spesifikasi, implementasi, komponen, dan faktor luar.
1. Kesalahan spesifikasi (Spesification Mistake)
Ini termasuk algortima, arsitektur, atau spesifikasi perancangan hardware
dansoftware yang salah.
2. Kesalahan implementasi (Implementation Mistake)
Implementasi, yang didefinisikan di sini, adalah proses transformasispesifikasi
hardware dan software ke dalam bentuk fisik hardware dansoftware sebenarnya.
Implementasi dapat memasukkan fault yang disebabkandesign yang jelek,
pemilihan komponen yang jelek, konstruksi jelek,kesalahan perngkodean
software.
3. Kerusakan komponen (Component Defect)
Ketidaksempurnaan manufaktur, kerusakan device acak, dan komponen using
11
ikatan dalam rangkaian atau korosi logam.Kerusakan komponenpaling umum
dipertimbangkan sebagai salah satu dari beberapa penyebabfault.
4. Gangguan luar (External Disturbance)
Seperti : radiasi, interfensi elektromagnetik, kerusakan akibat perang,kesalahan
operator dan lingkungan yang ekstrim.
Ada tiga bentuk teknik utama usaha memperbaiki atau memelihara unjukkerja
normal sistem yaitu :fault avoidance, fault masking, dan fault tolerance.
a. Fault avoidance
Fault avoidance adalah teknik yang digunakan untuk mencegah fault padatempat
yang pertama. Fault avoidance dapat termasuk hal-hal seperti :tinjauan design,
penyaringan komponen, testing, metode kontrol kualitaslainnya. Jika tinjauan
design misalnya, dilakukan dengan tepat, banyakkesalahan spesifikasi yang dapat
mengakibatkan fault dapat dihilangkan. Jugasistem dapat sering dilindungi untuk
mencegah gangguan luar yangmenimbulakn fault dalam sistem seperti halilintar
atau radiasi. Perlindunganadalah bentuk fault avoidance.
b. Fault masking
Fault masking adalah proses yang mencegah kerusakan dalam sistem darierror
yang masuk ke dalam susunan informasi dari sistem tersebut. Error correcting
memories, sebagai contohnya, memperbaiki data memori sebelumsistem memakai
data.Jadi sistem tidak pernah mengalami dampak kerusakandalam memori.
Contoh lain dari fault masking adalah pengambilan suaramayoritas. Jika komite
tiga orang membuat keputusan dengan voting ya atautidak dalam suatu
Keputusan yang dihasilkan oleh komite mewakilikeinginan mayoritas anggota
komite dan menutupi (mask) keinginan darianggota yang mungkin saja tidak
setuju dengan mayoritas. Teknik yang samadapat diterapkan pada sistem digital
sedemikian hingga dua modul dapatmenutupi akibat dari modul yang rusak.
c. Fault tolerance
Fault tolerance adalah kemampuan sistem untuk melanjutkan tugasnya
setelahterjadinya kerusakan. Sasaran pokok fault tolerance adalah
mencegahkegagalan (failure) sistem jika sekiranya terjadi. Karena failure
disebabkanlangsung oleh error, istilah fault tolerance dan error tolerance
seringdigunakan saling bertukaran.
Fault tolerance dapat dicapai dengan banyak teknik. Tentu saja fault masking
adalah salah satu pendekatan untuk mentolerir fault yang terjadi.
Pendekatanlainnya adalah mendeteksi dan melokasikan fault yang terjadi dan
rekonfigurasisistem untuk mengganti komponen yang rusak.
Rekonfigurasi adalah proses penghilangan bagian sistem yang rusak
danmemperbaiki sistem pada kondisi atau keadaan operasional. Jika teknik
rekonfigurasidigunakan, perancang harus memperhatikan proses-proses berikut
ini:
1. Fault detection adalah proses pengenalan apakah sebuah fault terjadi. Fault
detection sering digunakan sebelum prosedur pemulihan dapat
13
2. Fault location adalah proses penentuan dimana fault terjadi sehingga
pemulihan yang tepat dapat diimplementasikan.
3. Fault containment adalah proses pengisolasian fault dan mencegah akbiat
faultmenyebar ke selururh sistem. Fault containment dibutuhkan dalam
semua rancangan fault tolerance.
4. Fault recovery adalah proses dari penetapan operasional atau
perolehankembali status operasional lewat rekonfigurasi jika sekiranya ada
fault.
C. Perangkat Keras
1. Sensor Suhu LM35
Sensor adalah piranti yang menghasilkan sinyal keluaran yang sebanding dengan
parameter yang diindera (sensing).Sensor LM35 adalah sensor suhu yang
memberikan keluaran berupa perubahan tegangan, dengan nilai perubahan
tegangan keluaran yang sebanding dengan perubahan suhu dalam derajat celcius
(oC). Setiap perubahan suhu 1oC akan memberikan perubahan tegangan keluaran
sebesar 10mV, sehingga pada suhu 0 oC keluarannya adalah 0 V dan pada
perubahan suhu 100 oC keluarannya sebesar 1 V.Dengan nilai perubahan suhu
yang linier sensor suhu LM35 tidak memerlukan kalibrasi karena tegangan
keluarannya telah sebanding dengan kenaikan suhu dalam skala derajat celcius
(oC).
Tegangan kerja dari sesor suhu LM35 adalah 4 sampai 30 Volt DC dan arus yang
dibutuhkan sebesar 60 μA, sehingga borosan kalor internal sangat kecil dan panas
diperoleh dari sensor suhu LM35 adalah rentang pengukuran yang sangat luas
yaitu dari -50 oC sampai 150 oC. Selain itu ada beberapa kelebihan dari sensor
suhu LM35 dari sensor temperatur lain adalah:
Hasil pengukuran lebih akurat dibandingkan dengan menggunakan
thermistor.
Rangkaian sensor tertutup dan tidak bergantung (tidak terpengaruh) pada
oksidasi.
Sensor suhu LM35 menghasilkan tegangan keluaran lebih besar
dibandingkan dengan thermocouple dan tegangan keluaran tidak perlu
diperbesar.
Meskipun tegangan sensor ini dapat mencapai 30 volt akan tetapi yang diberikan
ke sensor adalah sebesar 5 volt, sehingga dapat digunakan dengan catu daya
tunggal dengan ketentuan bahwa sensor LM35 hanya membutuhkan arus sebesar
60 µA hal ini berarti LM35 mempunyai kemampuan menghasilkan panas dari
sensor yang dapat menyebabkan kesalahan pembacaan yang rendah yaitu kurang
dari 0,5oC pada suhu 25oC .
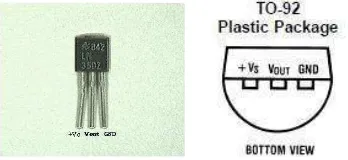
Gambar 2.2Sensor suhu LM35
Gambardi atas menunjukan bentuk dari sensor LM35, 3 pin sensor LM35 fungsi
15
LM35, pin 2 atau tengah sebagai tegangan keluaran atau Vout dan pin 3 sebagai
ground. Keluaran sensor ini akan naik sebesar 10 mV setiap
derajad celcius.Secara prinsip sensor akan melakukan penginderaan pada saat
perubahan suhu setiap suhu 1 ºC akan menunjukan tegangan sebesar 10 mV.
Berikut ini adalah karakteristik dari sensor LM35:
a. Memiliki sensitivitas suhu, dengan faktor skala linier antara tegangan
dansuhumVolt/ºC,sehingga dapat dikalibrasi langsung dalam celcius.
b. Memiliki ketepatan atau akurasi kalibrasi yaitu 0,5oC pada suhu 25oC
c. Memiliki jangkauan maksimal operasi suhu antara -55oC sampai +150oC
d. Bekerja pada tegangan 4 sampai 30 volt.
e. Memiliki arus rendah yaitu kurang dari 60 µA.
f. Memiliki pemanasan sendiri yang rendah (low-heating) yaitu kurang
dari 0,1 ºC pada udara diam.
g. Memiliki impedansi keluaran yang rendah yaitu 0,1 W untuk beban 1
mA.
h. Memiliki ketidaklinieran hanya sekitar ± ¼ ºC.
2. Mikrokontroler ATMega16[5]
Mikrokontroler merupakan sebuah sistem mikroprosesor dimana di dalamnya
sudah terdapat CPU (Central Proccesssing Unit), RAM (Random Acess Memory),
EEPROM (Electrically Erasable Programmable read only Memori),
I/O,Timerdan peralatan internal lainnya yang sudah saling terhubung terorganisasi
pakai.Umumnya mikrokontroler memiliki instruksi manipulasi bit, akses ke I/O
secara langsung,proses interupsi yang cepat dan efisien. Penggunaan
mikrokontrolersudah banyak dapatditemuidalam berbagai peralatan
elektronik,seperti telepon digital,microwave oven, televisi, dan lain
lain.Mikrokontroler juga dapat kita gunakan untuk berbagai aplikasi dalam
industri seperti: sistem kendali, otomasi dan lain-lain.
Keuntungan menggunakan mikrokontroler adalah harganya murah, dapat
diprogram berulangkali.AVR (Alf and Vegard’s Risk processor), merupakanseri
mikrokontrollerCMOS 8-bit buatan atmel,berbasis arsitekturRISC(Reduced
Instruction set Computer ). Hampir semua instruksi dieksekusi dalam satu siklus
clock.AVR mempunyai 32 register general-purpose, timer/counter fleksibel
dengan mode compare, interrupt internal dan eksternal. AVR juga mempunyai
in-sistem programmable flash on-chip yang mengizinkan memori program untuk
diprogram ulang dalam sistem menggunakan hubungan serial ATmega16.
Beberapa keistimewaan AVR ATmega16 antara lain:
a) Advanced RISC architecture
130 powerful instructions-most single clock cycle Execution.
32 x 8 General purpose fully static operation.
Up to 16 MIPS throughput at 16 MHz.
On-chip 2-cycle Multiplier.
b) Non volatile program and data memories.
8K Bytes of in-system self-programmable flash
17
512 Bytes EEPROM.
512 Bytes internal SRAM..
Programming Lock for software security.
c) Peripheral Features.
Two 8-bit Timer / counters with separatet prescalers and compare
mode.
Two 8-bit Timer with separatet prescalers and compare modes.
One 16-bit timer with separaatet prescaler, compare mode
Real time counter with separatet oscillator.
Four PWM channels.
8-chanel, 10-bit ADC.
Programmable serial USART.
d) Special Microcontroller Features.
Power-on Reset and Programmable Brown-out Detection.
Internal calibrated RC Oscillator.
External and internal interrupt Sources.
Six sleep modes : idle, ADC noise reduction save,
power-down, standby and extended standby.
e) I /O and Package.
32 Programmable I /O Lines.
40-pin PDIP, 44-lead, TQFP, 44-lead PLCC and 44-pad MLF.
f) Operating Voltages.
4.5 – 5.5 V for Atmega 16
a. Spesifikasi Mikrokontroler ATmega16
Mikrokontroler ATmega16 memiliki fitur yang lengkap (ADC internal, EEPROM
internal,Timer/Counter, WatchdogTimer, PWM, Port I/O, komunikasi serial,
Komparator).
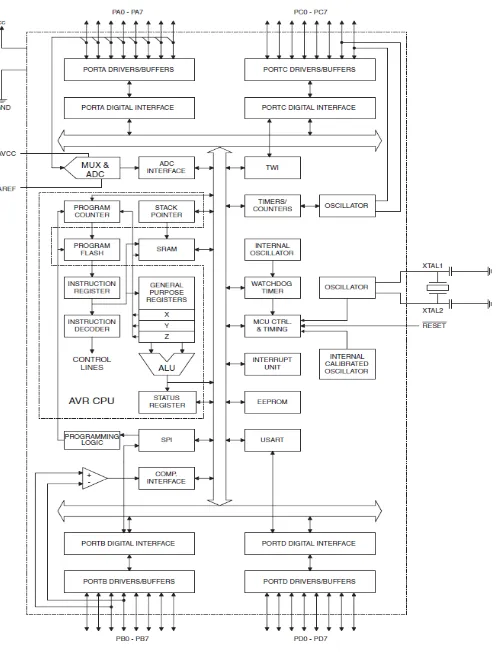
Gambar 2.3 Blok diagram fungsional ATmega16
Dari Gambar 2.3 dapat dilihat bahwa ATmega16 memilikibagiansebagai berikut:
Saluran I/O sebanyak 32 buah, yaitu PortA, Port B, Port C, dan Port D.
ADC 10 bit sebanyak 8 saluran.
19
CPU yang terdiri atas 32 buah register.
Watchdog Timer dengan osilator internal.
SRAM sebesar 1Kbyte.
Memori Flash sebesar 16 Kbyte dengan kemampuan Read While Write.
Unit interupsi internal dan eksternal.
Port antarmuka SPI.
EEPROM(Electrically Erasable Programmable Read Only Memori)
sebesar 512 byteyang diprogram saat operasi.
Antarmuka komparator analog.
PortUSART untuk komunikasi serial dengan kecepatan maksimal 12,5
Mbps.
Sistem mikroprosesor 16 bit berbasis RISC dengan kecepatan maksimal
16 MHz.
b. Konfigurasi Pin ATmega16
Gambar 2.4 Konfigurasi Pin ATmega16
Konfigurasi pinpada mikrokontroller ATmega16 dapat dilihat pada Gambar 2.3
fungsi dari pin ATmega16tersebut adalah sebagai berikut:
VCC merupakan Pin yang berfungsi sebagai pin masukan catudaya
GND merupakan PinGround
Port A (PA0...PA7) merupakan pin I/O dan pin masukan ADC
Port B (PB0...PB7) merupakan pin I/O dua arah dan pin yang
mempunyai fungsi khusus yaitu Timer/Counter, komparator analog dan
SPI
Port C (PC0...PC7) merupakan port I/O dua arah dan pin yang
mempunyai fungsi khusus, yaitu komparator analog dan Timer
Oscillator
Port D (PD0...PD7) merupakan port I/O dua arah dan pin fungsi khusus
yaitu komparator analog dan interrupt eksternal serta komunikasi serial
RESET merupakan pin yang digunakan untuk mengembalikan kondisi
mikrokontroler seperti semula
XTAL1 dan XTAL2pin untuk eksternal clock
AVCC adalah pin masukan untuk tegangan ADC
AREF adalah pin masukan untuk tegangan referensi eksternal ADC
21
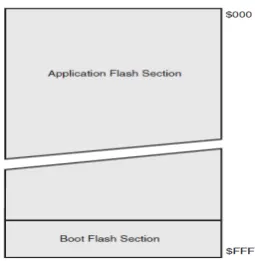
Arsitektur ATmega16 mempunyai dua memori utama, yaitu memori data
dan memori program. Instruksi ATmega16 semuanya memiliki format 16 atau 32
bit, maka memori flash diatur dalam 8K x 16 bit. Memori flash dibagi kedalam
dua bagian, yaitu bagian program boot dan aplikasi seperti terlihat pada
Gambar 2.4Bootloader adalah program kecil yang bekerja pada saat sistem
dimulai yang dapat memasukkan seluruh program aplikasi ke dalam memori
prosesor.
Gambar 2.5 Memori data AVR ATmega16
Memori Data
Memori data AVR ATmega16 terbagi menjadi 3 bagian, yaitu 32 register umum,
64 buah register I/O dan 1 Kbyte SRAM internal. General purpose
registermenempati alamat data terbawah, yaitu 00 sampai 1F. Sedangkan
memori I/O menempati 64 alamat berikutnya mulai dari 20 hingga 5F.
Memori I/O merupakan register yangkhusus digunakan untuk mengatur fungsi
terhadap berbagai fitur mikrokontroler seperti kontrol register, timer/counter,
fungsi I/O, dan sebagainya. 1024 alamat berikutnya mulai dari 60 hingga 45F
Memori Data EEPROM
ATmega16 terdiri dari 512 byte memori data EEPROM 8 bit, data dapat
ditulis/dibaca dari memori ini, ketika catu daya dimatikan, data terakhir yang
ditulis pada memori EEPROM masih tersimpan pada memori ini, atau dengan
kata lain memori EEPROM bersifat nonvolatile. Alamat EEPROM mulai dari 000
sampai 1FF.
d. Perangkat Lunak
Bahasa pemrograman C merupakan salah satu bahasa pemrogramankomputer.
Dibuat pada tahun 1972 oleh Dennis Ritchie untuk Sistem OperasiUnix di Bell
Telephone Laboratories. Meskipun C dibuat untuk memprogram sistem dan
jaringan komputer namun bahasa ini juga sering digunakan dalam
mengembangkan software aplikasi.C juga banyak dipakai oleh berbagai jenis
platform sistem operasi dan arsitektur komputer, bahkan terdapat beberapa
compiler yang sangat populer telah tersedia.C secara luar biasa mempengaruhi
bahasa populer lainnya, terutama C++ yang merupakan extensi dari C.
Dalam memprogram chip mikrokontroler ATmega16 pada proyek tugas akhir ini
digunakan software CodeVision AVR v2.05. CodeVision AVRv2.05 merupakan
software untuk membuat source code program mikrokontroler Atmega16.
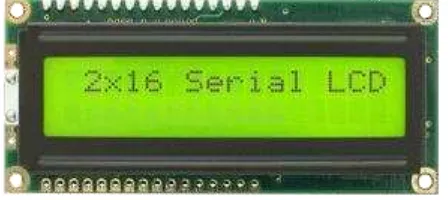
3. LCD (Liquid Crystal Display)
!
LCD merupakan suatu jenis penampil (display) yang menggunakan Liquid Crystal
23
yang menggunakan mikrokontroler.LCD dapat berfungsi untuk menampilkan
suatu nilai hasil sensor,menampilkan teks, atau menampilkan menu pada aplikasi
mikrokontroler, tergantung dengan perintah yang ditulis pada mikrokontroler.
Gambar 2.6LCD 2 x 16 Karakter
LCD yang akan digunakan adalah LCD dengan tipe karakter 2 x 16 yaitu alat
penampil yang dibuat pabrikan umum dijual dipasaran standar dan dapat
menampilkan karakter 2baris dengan tiap baris 16 karakter.
4. Relay[6]
Relay adalah sebuah peralatan listrik yang berfungsi sebagai saklar (switch),relay
bekerja pada saat coilrelay diberikan tegangan atau arus. Pada saat coil diberikan
arus maka pada inti coil akan menjadi magnet yang kemudian menarik
kontak-kontak penghubung pada relay tersebut.Pada relay terdapat dua buah kontak yang
berbeda yakni kontak NO(Normaly Open)danNC (Normaly Close).Pada saat
kumparan coil belum diberikan arus keadaan kontak NO akan terbuka dan pada
saat kumparan coil diberikan arus kontak NO akan terhubung.Untuk kontak
NC(Normaly Close) pada saat kumparan coil belum diberikan arus kontak NC
belum terhubung dan pada saat kumparan coil dialiri arus maka kontak NC
Gambar 2.7 Relay
Relaydigunakan pada sistem kelistrikan yang bertegangan rendah dan bertegangan
tinggi. Tegangan rendah digunakan untuk mengaktifkan kumparan coil agar
kontak-kontak relay tehubung untuk kontak NO dan tebuka untuk kontak NC.
Sedangkan tegangan tinggi yang terpasang pada kontak-kontak relay baik kontrak
NO atau kontak NC, karena kontak-kontak hubung pada relay dirancang dengan
bahan tembaga yang tahan terhadap tegangan dan arus yang besar sesuai dengan
standar pada relay tersebut.
5. Pemanas(Heater)
Electrical Heating Element (elemen pemanas listrik) banyak dipakai dalam
kehidupan sehari-hari, baik didalam rumah tangga ataupun peralatan dan mesin
industri. Bentuk dan type dari Electrical Heating Element ini bermacam -macam
disesuaikan dengan fungsi, tempat pemasangan dan media yang akan di panaskan.
Panas yang dihasilkan oleh elemen pemanas listrik ini bersumber dari kawat
ataupun pita bertahanan listrik tinggi (Resistance Wire) biasanya bahan yang
digunakan adalah niklin yang dialiri arus listrik pada kedua ujungnya dan dilapisi
oleh isolator listrik yang mampu meneruskan panas dengan baik hingga aman jika
digunakan.
25
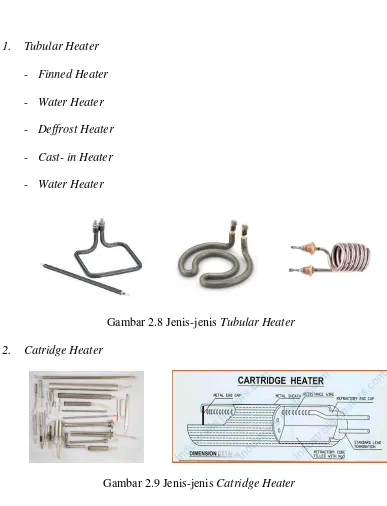
1. Tubular Heater
- Finned Heater
- Water Heater
- Deffrost Heater
- Cast- in Heater
- Water Heater
Gambar 2.8 Jenis-jenis Tubular Heater
2. Catridge Heater
Gambar 2.9 Jenis-jenis Catridge Heater
3. Band, Nozzle Dan Stripe Heater
- Band Heater
- Nozzle Heater
- Band Ceramiok Heater
- Stripe Heater
- Plate Heater
- Curve Heater
- Mika Heater
Gambar 2.10 Jenis-jenis Band, Nozzle Dan Stripe Heater
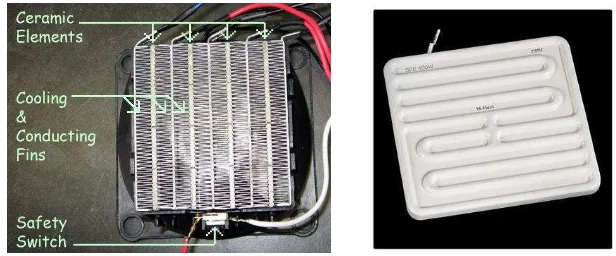
4. Silica dan Ceramik Heater
- Infra Red Heater
- Ceramik Black Body Heater
- Silica Heater
- Quartz Heater
III. METODE PENELITIAN
A. Waktu dan Tempat
Penelitian dan perancangan tugas akhir dilakukan di Laboratorium Terpadu
Teknik Elektro Universitas Lampung dilaksanakan mulai bulan Februari 2013
sampai dengan Oktober 2013.
B. Alat dan Bahan
Alat dan bahan yang digunakan dalam penelitian yaitu:
1. Instrumen dan komponen elektronika yang terdiri atas:
a) Multitester
b) Termometer Digital
c) Fan DC
d) LCD 2x16
e) IC Mikrokontroler ATMega16
f) IC Regulator
g) MOC 3041
h) Relay 12 V
i) Lampu Pijar
j) LM35
2. Perangkat kerja yang terdiri atas:
a) Komputer
b) Power supply
c) Downloader AVR
d) Papan projek (Project Board)
e) Bor PCB
f) Solder
g) Kabel penghubung
h) Header Pin
3. Komponen bantu yang terdiri atas:
a) PCB
b) Feritklorit
c) Timah
C. Spesifikasi Rancangan Alat
Spesifikasi alat yang akan dibuat adalah sebagai berikut:
1) Boks inkubator bayi menggunakan bahan Accrilyc dengan bentuk yang
sama (asli) atau modifikasi.
2) Sensor suhu menggunakan LM35 dan sebagai pemanas menggunakan tiga
buah lampu pijar masing-masing 100 watt, 60 watt, dan 60 watt.
3) Baterai atau accu sebagai suplai cadangan saat suplai utama mati
(portable).
4) Pengaturan suhu secara otomatis dengan mikrokontroler (sensor dan
29
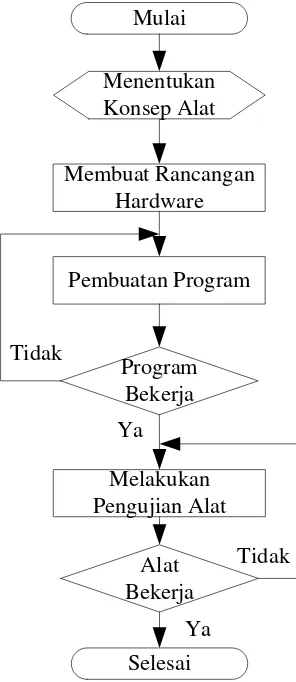
D. Prosedur Kerja
Langkah kerja dalam tugas akhir ini meliputi:
1) Penentuan spesifikasi rancangan
2) Perancangan perangkat keras/Hardware
3) Perancangan perangkat lunak/Software
4) Pengujian alat
Diagram alir prosedur kerja dapat dilihat pada gambar 3.1 berikut:
Gambar 3.1 Diagram Alir Pengerjaan Tugas Akhir
1. Penentuan Spesifikasi Rancangan a. Blok Rancangan Sistem
Secara garis besar blok diagram perancangan perangkat keras dapat dilihat pada
gambar berikut:
Gambar 3.2. Blok Rancangan Sistem
Secara garis besar prinsip kerja dari peralatan yang digambarkan dari blok
diagram di atas adalah sebagai berikut:
Sensor suhu yang digunakan adalah sensor LM35, dimana sensor 1 dan sensor 2
dipasang pada ruangan inkubator untuk mengetahui perubahan suhu yang terjadi
dengan mengambil nilai rata-rata dari kedua sensor. Sedangkan sensor 3
digunakan untuk mengetahui setiap perubahan suhu pada objek yang ada di dalam
ruangan inkubator. Mikrokontroler yang digunakan adalah Atmega16 sebagai
pemroses data dari semua masukan yang diterjemahkan sebagai keluaran untuk
31
Sensor suhu akan membaca setiap perubahan suhu yang terjadi di dalam inkubator
dan suhu terhadap objek. Penentuan set point suhu disesuaikan dengan kondisi
objek sesuai standar yang ada, heater atau pemanas bekerja sesaat setelah set point
ditentukan. Setiap perubahan suhu yang terjadi kemudian ditampilkan melalui
LCD, apabila suhu yang terbaca belum mencapai set point maka heater atau
pemanas akan tetap aktif. Fan inlet digunakan sebagai pemerata udara panas dari
ruang pemanas ke ruang di dalam inkubator, sedangkan exhaust fan digunakan
apabila suhu di dalam inkubator terlalu panas atau untuk menurunkan suhu di
dalam inkubator.
Pengendalian suhu ruangan inkubator bayi dilakukan secara fault tolerance,
dimana pembacaan suhu menggunakan sensor yang membandingkan besar suhu
yang terbaca pada masing-masing sensor untuk mendapatkan suhu yang optimal.
Sedangkan untuk proses pemanasan ruangan di dalam inkubator bayi, pemanas
dihidupkan selama suhu mencapai nilai set point, yaitu pemanas 1 dan pemanas 2.
Jika salah satu pemanas tidak berfungsi, maka pemanas cadangan yang
mem-backup.
Gambar 3.3 menunjukkan skema rangkaian pengendali inkubator bayi secara
Gambar 3.3 Skema rangkaian pengendali secara keseluruhan
33
Gambar 3.4 Desain Inkubator dan Sirkulasi Aliran Udara
Gambar 3.4 di atas merupakan desain inkubator dan sirkulasi aliran udara yang
akan dibuat, bahan menggunakan bahan yang murah tetapi awet sesuai dengan
tujuan pembuatan alat ini. Sesuai gambar di atas inkubator bayi dibuat dengan
ukuran 90 x 40 x 60 cm dan pada bagian bawah digunakan untuk penempatan
peralatan pengendali dan pemanas.
Udara masuk melalui lubang inlet untuk dipanaskan, udara panas akan
didistribusikan keseluruh ruangan pada boks atas dengan bantuan fan. Sirkulasi
udara di dalam ruangan boks bagian atas seperti terlihat pada gambar 3.4 di atas,
udara panas akan keluar melalui lubang keluaran (outlet) jika panas melewati
batas maksimum dengan bantuan fan hisap.
Boks atas
Arm port
Alas objek
Penampil LCD Switch setting
2. Perancangan Perangkat Keras (Hardware)
Rangkaian yang digunakan dalam perancangan hardware antara lain adalah:
a. Power supply
Power supply umumnya dipakai pada rangkaian listrik yang bertegangan rendah.
Dan dalam penelitian tugas akhir ini power supply menghasilkan output tegangan
yaitu 12V dan 5V DC yang akan dipakai sebagai sumber tegangan untuk
rangkaian mikrokontroler, LCD, driver pemanas dan driver fan.
Gambar 3.5 Rangkaian Power Supply
b. Rangkaian sensor
Rangkaian sensor yang digunakan adalah sensor LM35 yang terlihat seperti
gambar 3.6 yaitu sensor untuk suhu. Sensor ini memiliki 3 buah pin diantaranya:
1)pin 1 berfungsi sebagai sumber tegangan.
2)Pin 2 berfungsi sebagai output tegangan.
35
.
Gambar 3.6 Rangkaian sensor
Rangkaian sensor suhu ini berfungsi sebagai pendeteksi suhu ruangan di dalam
ruang inkubator bayi. Sensor LM35 bekerja dengan cara merasakan atau
mendeteksi keadaan suhu sekitar menjadi tegangan analog. Pada setiap
perubahan suhu per 10 = 10 mV. Tegangan output inilah yang menjadi sumber
inputan pada mikrokontroler. Suplai yang dibutuhkan berkisar antara 2,5 – 5,5 V.
c. Rangkaian pengendali
Rangkaian pengendali atau kontrol berfungsi untuk mengendalikan kerja dari
rangkaian pemanas serta pengendali fan yang digunakan pada inkubator bayi
seperti terlihat pada gambar 3.7. Rangkaian kontrol ini menggunakan
mikrokontroler ATmega16 yang memiliki fitur membaca nilai output dari
rangkaian sensor suhu.
Pin yang digunakan pada ATmega16 ini sebagai input adalah pin A0 yang
merupakan pin untuk sensor 1, pin A1 untuk sensor 2, serta pin A2 untuk sensor
3. Sedangkan pin outputnya adalah pin B0, pin B5 dan pin B6 untuk driver
pemanas serta pin B1 digunakan untuk driver fan. Keypad menggunakan pin B2,
B3, dan B4. Untuk LCD digunakan Pin D.
d. Rangkaian pemicu
Gambar 3.8 adalah rangkaian yang digunakan untuk pensaklaran yang dipakai
untuk kipasdanheater juga sekaligus sebagai pemisah antara rangkaian switching
dan mikrokontroler.
Gambar 3.8 Rangkaian Pemicu
Keluaran dari PORTB0 menjadi masukan untuk mengaktifkan optocoupler, pada
kaki 6 MOC3041 terhubung pada kaki 2 BT139 dan sumber. Sedangkan kaki 1
BT139 terhubung pada salah satu beban.
e. Rangkaian LCD
LCD digunakan untuk menampilkan perintah-perintah yang ditulis pada program
37
terbaca pada pin input ADC dan menampilkan program interupsi dari
mikrokontroler ATmega16.
Gambar 3.9 Rangkaian LCD ke Mikrokontroler
Pada gambar 3.8 diatas dapat dilihat bahwa, kaki 4, 5, 6, 11, 12, 13, 14 pada LCD
dihubungkan kepada port C pada ATmega16, sedangkan kaki 1 dan 3 terhubung
dengan ground.
f. Keypad
Keypad pada rangkaian ini merupakan susunan tombol yang terhubung dengan
mikrokontroler dan berfungs sebagai tombol untuk memberikan nilai setting suhu.
Gambar 3.10 Keypad
Tombol-tombol yang digunakan merupakan saklar push button yang berfungsi
Tombol-tombol disini difungsikan sebagai saklar untuk mengubah setting suhu
pada set point dimana terdapat 3 (tiga) buah tombol yaitu setting, plus, dan minus.
3. Perancangan Perangkat Lunak (Software)
Perangkat lunak yang digunakan untuk memprogram mikrokontroler
menggunakan bahasa pemrograman C pada software Code Vision AVR.
Gambar 3.11 Tampilan software Code Vision AVR
Langkah-langkah perancangan perangkat lunak ini dapat dijelaskan sebagai
berikut:
1. Pembuatan source code program, kemudian simpan file dengan nama
yang sama dengan ekstensi (.c) (.prj) (.cwp).
2. Source code tadi kemudian di-compile untuk menghasilkan file dengan
39
Setelah didapatkan file dengan ekstensi .hex maka file tersebut dapat di-download
ke mikrokontroler denga menggunakan AVR Prog AVR yang ada di Code Vision
AVR atau menggunakan aplikasi lain yang berfungsi untuk men-download file
.hex ke mikrokontroler.
Prosedur pembuatan program sampai dengan proses men-download program ke
mikrokontroler dapat dilihat pada gambar 3.12 di bawah ini.
Gambar 3.12 Diagram alir pembuatan program
Program yang dirancang sebagai kendali pada rangkaian sistem pengendali suhu
pada inkubator bayi mengacu pada perangkat keras yang telah dijelaskan
Mulai
69
V. KESIMPULAN DAN SARAN
A. Kesimpulan
Setelah dilakukan perancangan dan pembuatan inkubator bayi serta mengujinya,
maka penulis mengambil kesimpulan sebagai berikut:
1. Sistem fault tolerance pada inkubator ini dapat berfungsi dengan baik, yaitu
ditandai dengan berfungsinya pemanas cadangan pada kondisi salah satu
pemanas utama mengalami kegagalan kerja. Dimana pada kondisi normal
pencapaian suhu di dalam inkubator bayi dengan waktu rata-rata 4 menit per
1oC.
2. Waktu yang dibutuhkan dalam proses pemanasan suhu di dalam inkubator
bayi mulai dari suhu ruang di dalam inkubator bayi hingga mencapai suhu set
point 32oC sebesar 8.25 menit, sedangkan untuk kenaikan suhu pada
masing-masing set point yang berbeda-beda hingga mencapai suhu stabil yaitu
rata-rata 1oC per 4 menit.
3. Kestabilan suhu inkubator dapat dipertahankan dengan baik selama 5 jam
dengan masing-masing set point suhu inkubator selama satu jam tanpa
melebihi batas ralat yang diinginkan yaitu ± 1 °C dari suhu setelan yang
B. Saran
1. Agar diperoleh hasil pengukuran yang lebih baik, maka harus diperhatikan
dalam penggunaan sensor suhu yang mempunyai faktor kesalahan yang kecil.
Sensor suhu LM35 dapat digantikan dengan sensor suhu lain seperti SHT11
yang mempunyai faktor kesalahan yang kecil untuk mendapatkan hasil
pengukuran yang lebih akurat.
2. Pemilihan pemanas yang lebih baik seperti elemen pemanas listrik yang
mampu menghasilkan panas dengan baik dan mampu menjaga panas dengan
stabil, penggunaan lampu pijar mempunyai kekurangan pada cahaya yang
dihasilkan.
3. Dapat ditambahkan pengukuran kelembaban dan kamera pengawas serta
DAFTAR PUSTAKA
[1] Saifuddin AB. Buku Acuan Nasional Pelayanan Kesehatan Material dan Neonatal. Jakarta: Yayasan Bina Pustaka; 2006.
[2] Sugito, Heri. Rancang Bangun Sistem Pengaturan Suhu Ruang Inkubator Bayi Berbasis Microcontroller AT89S51. Jurusan Fisika FMIPA Undip Semarang; 2009.
[3] Nurlandi, Farida. Desain Inkubator Bayi Dengan Kontrol Otomatis Yang Ekonomis Untuk Klinik Persalinan (Ecobator). Surabaya: Jurusan Desain Produk Industri FTSP ITS; 2010.
[4] Keterampilan Klinik Menghangatkan Bayi. Lampung: Majelis Pendidikan Tinggi Akbid Muhammadiyah Pringsewu; 2008.
[5] Andrianto, Heri. Pemrograman mikrokontroler AVR ATmega16. Bandung; 2008.
[6] Zuhal. Dasar Teknik Tenaga Listrik dan Elektonika Daya. Jakarta: Gramedia Pustaka Utama; 1995.
[7] YP-100 Infact Incubator. Operator and Service Manual. GEA MEDICAL