2.1. AQUASCAPE
AQUASCAPE merupakan kegiatan membuat pemandangan taman air di dalam tank/aquarium yang berisi air berbentuk taman, hutan, gunung/bukit, atau pun kombinasi dari semuanya dalam membuat ekosistem. Dimana tumbuhan sebagai komponen utamanya yang di dukung oleh perlengkapan-perlengkapan guna menghasilkan tumbuhan yang tumbuh subur serta pemandangan berseni tinggi sehingga enak dipandang dan dinikmati keindahannya. Seni menata atau mengatur tanaman di dalam air sehingga menjadi sebuah landskap yang indah yang dilengkapi dengan hadirnya fauna yang cantik [3]. Seni becocok tanam dalam air ini dikenalkan pertama kali oleh Takashi Amano pada tahun 1990. Takeshi Amano adalah seorang pecinta aquarium (aquarist). Beliaulah yang membuat seni aquascape menjadi terkenal di seluruh dunia. Ia juga menjadi seorang aquascaper yang paling berpengaruh di dunia. Dimana karya-karyanya menjadi inspirasi bagi banyak aquarist di seluruh dunia. Teknik aquascape dari Takashi Amano adalah berdasarkan teknik berkebun di Jepang yang meniru pemandangan alam dengan pengaturan asimetris. Teknik dan gaya aquascape seperti ini menjadi teknik yang disukai dan banyak digunakan oleh para aquarist yang lain. Beberapa spesies tanaman yang unik, batu yang dipilih dengan cermat, kayu apung (driftwood) dijadikan perpaduan yang menarik oleh Takashi Amano, biasanya dengan satu titik fokus. Tujuannya adalah untuk membentuk miniatur dari pemandangan alam, bukan sebuah taman yang berwarna warni. Penggambaran gaya aquascape Amano ini berasal dari konsep estetika Jepang yang disebut Wabi-sabi, yang berfokus pada kefanaan dan gaya minimalis sebagai sumber keindahan.
Disamping sebagai seorang aquarist, Amano adalah seorang fotografer dan desainer. Ketertarikannya kepada aquarium mengantarnya mendirikan mendirikan perusahaan di Jepang yang bernama Aqua Design Amano (ADA). Perusahaan ini
bergerak dibidang desain dan mengembangkan produk akuarium, pencahayaan dan sistem pasokan CO2. Selain itu Amano adalah pengarang buku Nature Aquarium World, tiga buku seri tentang aaquascaping, tanaman aquarium air tawar dan ikan. Dia juga menerbitkan buku yang berjudul “Aquarium Plant Paradise”.
2.2. PENGENALAN ARDUINO
Arduino adalah pengendali mikro single-board yang bersifat open-source dirancang untuk memudahkan penggunaan elektronik dalam berbagai bidang. Hardwarenya memiliki prosesor Atmel AVR dan softwarenya memiliki bahasa pemrograman sendiri.
Arduino juga merupakan platform hardware terbuka yang ditujukan kepada siapa saja yang ingin membuat bermacam peralatan elektronik interaktif berdasarkan hardware dan software yang fleksibel dan mudah digunakan. Mikrokontroler diprogram menggunakan bahasa pemrograman arduino yang memiliki kemiripan syntax dengan bahasa pemrograman C. Karena sifatnya yang terbuka maka siapa saja dapat mengunduh skema hardware arduino dan membangunnya.
Arduino menggunakan keluarga mikrokontroler ATMega yang dirilis oleh Atmel sebagai basis, namun ada individu/perusahaan yang membuat clone arduino dengan menggunakan mikrokontroler lain dan tetap kompatibel dengan arduino pada level hardware. Untuk fleksibilitas, program dimasukkan melalui bootloader meskipun ada opsi untuk membypass bootloader dan menggunakan downloader untuk memprogram mikrokontroler secara langsung melalui port ISP [4].
2.3. C
Bahasa pemrograman C merupakan salah satu bahasa pemrograman komputer. Dibuat pada tahun 1972 oleh Dennis Ritchie untuk Sistem Operasi Unix di Bell Telephone Laboratories. Meskipun C dibuat untuk memprogram system dan jaringan computer namun bahasa ini juga sering digunakan dalam mengembangkan software aplikasi. C juga banyak dipakai oleh berbagai jenis platform system operasi dan arsitektur komputer, bahkan terdapat beberepa compiler yang sangat popular
telah tersedia. C secara luar biasa mempengaruhi bahasa popular lainnya, terutama C++ yang merupakan extensi dari C. Pada tahun 1978, Dennis Ritchie dan Brian Kernighan menerbitkan edisi pertama dari buku yang berjudul The C Programming Language. Buku ini hingga sekarang diakui sebagai kitab suci bahasa C dan merupakan referensi utama seorang pemrogram yang ingin mengetahui tentang bahasa C, terutama karena begitu lengkapnya cakupan buku ini tentang bahasa C dan mudahnya program yang dicontohkan dalam buku ini.
Versi bahasa C yang ditampilkan dalam buku ini kemudian dikenal dalam kalangan pemrogram sebagai C K&R. Pada buku The C Programming Language edisi keduakemudian melingkupi ANSI C yang diperkenalkan belakangan. Pada perkembangannya, muncul versi-versi C lain yang pada akhirnya membuat kebingungan dikalangan pemrogram. Karena itu, pada tahun 1983, American National Standards Institute (ANSI) membuat sebuah komite untuk membuat sebuah versi standar dari bahasa C. Setelah melalui proses yang panjang dan sengit, pada tahun 1989, telah berhasil disahkan standar yang dinamakan ANSI X3.159-1989, versi ini sering kali dinamakan ANSI C, atau kadang-kadang C89.
Pada 1990, versi ANSI C diadopsi oleh Organization for Standardization (ISO) dengan sedikit perubahan dengan nama ISO/IEC 9899:1990. Versi ini seringkali dinamakan ISO C atau C90. Karenaversi ANSI C dan ISO C hanya memiliki sedikit perbedaan, pemanggilan C90 dan C89 merujuk pada bahasa yang sama.
2.4. ARDUINO MEGA
Arduino mega 2560 adalah Arduino mega 2560 papan microcontroller berbasiskan ATmega2560, mempunyai 54 pin input/output (15 pin dapat digunakan sebagai PWM output) 4 UARTs (hardware serial ports), 16 MHz crystal oscillator, penghubung USB, power jack, an ICSP header, dan tombol reset [5].
2.4.1. Pin Power
Arduino dapat diberikan power melalui koneksi USB atau power supply.
Powernya diselek secara otomatis. PIN power terdapat pada kaki 1 sampai kaki 6. Power supply dapat menggunakan adaptor DC atau baterai. Adaptor
dapat dikoneksikan dengan memasang jack adaptor pada koneksi port input
supply. Board Arduino dapat dioperasikan menggunakan supply dari luar
sebesar 6 - 20 volt. Jika supply kurang dari 7V, kadangkala pin 5V akan
menyuplai kurang dari 5 volt dan board bisa menjadi tidak stabil. Jika menggunakan lebih dari 12 V, tegangan di regulator bisa menjadi sangat panas dan menyebabkan kerusakan pada board. Rekomendasi tegangan ada pada 7 sampai 12 volt.
Penjelasan pada pin power adalah sebagai berikut : VIN
Tegangan input ke Board Arduino ketika menggunakan tegangan dari luar
(seperti yang disebutkan 5 volt dari koneksi USB atau tegangan yang diregulasikan). Pengguna dapat memberikan tegangan melalui pin ini, atau jika tegangan suplai menggunakan power jack, aksesnya menggunakan pin ini.
5V
Regulasi power supply digunakan untuk power mikrokontroller dan komponen lainnya pada board. 5V dapat melalui Vin menggunakan regulator pada board, atau supply oleh USB atau supply regulasi 5V lainnya.
3.3V
Suplai 3.3 volt didapat oleh FTDI chip yang ada di board. Arus maximumnya adalah 50mA.
Pin Ground
Memori
ATmega328 memiliki 32 KB flash memori untuk menyimpan kode, juga 2 KB yang digunakan untuk bootloader. ATmega328 memiliki 2 KB untuk SRAM dan 1 KB untuk EEPROM. Input dan Output Setiap 14 pin digital pada arduino dapat digunakan sebagai input atau output, menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead(). Input/output dioperasikan pada 5 volt. Setiap pin dapat menghasilkan atau menerima maximum 40 mA dan memiliki internal pull-up resistor (disconnected oleh default) 20- 50 KOhms.
Beberapa pin memiliki fungsi sebagai berikut :
o Serial : 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan
mengirim (TX) TTL data serial. Pin ini terhubung pada pin yang koresponding dari USB FTDI ke TTL chip serial.
o Interupt eksternal : 2 dan 3. Pin ini dapat dikonfigurasikan untuk
trigger sebuah interap pada low value, rising atau falling edge, atau perubahan nilai.
o PWM : 3, 5, 6, 9, 10, dan 11. Mendukung 8-bit output PWM
dengan fungsi analogWrite().
o LED : 13. Ini adalah dibuat untuk koneksi LED ke digital pin 13.
Ketika pin bernilai HIGH, LED hidup, ketika pin LOW, LED mati.
Konektor USB
Konektor USB adalah soket untuk kabel USB yang disambungkan ke komputer atau laptop. Berfungsi untuk mengirimkan program ke Arduino dan juga sebagai port komunikasi serial.
Input / Output Digital
Input/Output Digital atau digital pin adalah pin-pin untuk menghubungkan Arduino dengan komponen atau rangkaian digital. Input/Output digital pada KIT arduino terdapat pada kaki 1 samapai kaki 13. Misalnya kalau ingin membuat LED berkedip, LED tersebut bisa dipasang pada salah satu
pin I/O digital dan ground. Komponen lain yang menghasilkan output digital atau menerima input digital bisa disambungkan ke pin-pin ini.
Input Analog
Input Analog atau analog pin adalah pin-pin yang berfungsi untuk menerima sinyal dari komponen atau rangkaian analog. Misalnya dari potensiometer, sensor suhu, sensor cahaya, dsb.
Baterai / Adaptor
Soket baterai atau adaptor digunakan untuk menyuplai Arduino dengan tegangan dari baterai/adaptor 9V pada saat Arduino sedang tidak disambungkan ke komputer. Kalau Arduino sedang disambungkan ke komputer melalui USB, Arduino mendapatkan suplai tegangan dari USB.
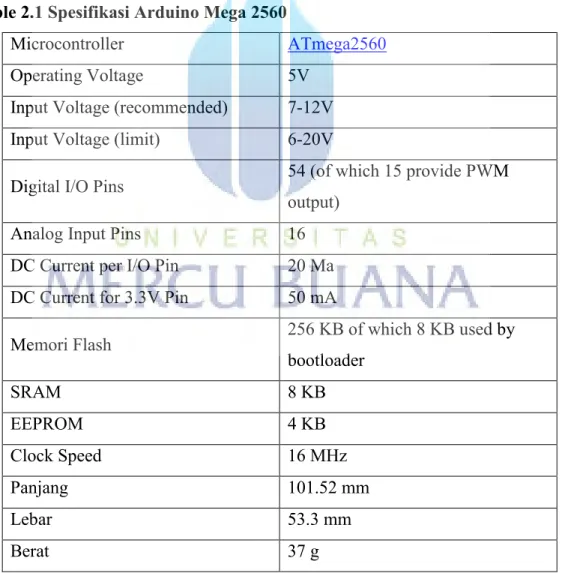
Table 2.1 Spesifikasi Arduino Mega 2560
Microcontroller ATmega2560
Operating Voltage 5V
Input Voltage (recommended) 7-12V
Input Voltage (limit) 6-20V
Digital I/O Pins 54 (of which 15 provide PWM
output)
Analog Input Pins 16
DC Current per I/O Pin 20 Ma
DC Current for 3.3V Pin 50 mA
Memori Flash 256 KB of which 8 KB used by
bootloader SRAM 8 KB EEPROM 4 KB Clock Speed 16 MHz Panjang 101.52 mm Lebar 53.3 mm Berat 37 g
2.5. ARDUINO IDE
Arduino IDE merupakan Open-source Arduino Software (IDE), memudahkan untuk menulis kode dan meng-upload ke papan arduino. Berjalan pada Windows, Mac OS X, dan Linux. dibuat dengan menggunakan Java dan berdasarkan Pengolahan dan perangkat lunak open source lainnya. Perangkat lunak ini dapat digunakan dengan papan Arduino. [6]
IDE Arduino adalah software yang dibuat dengan menggunakan Java. IDE Arduino terdiri dari:
1. Editor program, sebuah window yang memungkinkan pengguna menulis dan
mengedit program dalam bahasa Processing.
2. Compiler, sebuah modul yang mengubah kode program (bahasa Processing) menjadi kode biner. Bagaimanapun sebuah microcontroller tidak akan bisa memahami bahasa Processing. Yang bisa dipahami oleh microcontroller adalah kode biner. Itulah sebabnya compiler diperlukan dalam hal ini.
3. Uploader, sebuah modul yang memuat kode biner dari Jomputer ke dalam memory
di dalam papan Arduino.
2.6. PEMROGRAMAN DASAR ARDUINO
Struktur dasar arduino hanya terjadi dalam dua bagian:
Void setup() {
// Statement; di eksekusi satu kali }
Void loop() {
// Statement; di eksekusi terus menerus }
2.6.1. Setup
Fungsi setup() hanya dipanggil satu kali ketika program pertama kali di jalankan. Ini digunakan untuk mendifinisikan mode pin atau memulai komunikasi serial. Fungsi setup() harus di ikut sertakan dalam program ,walaupun tidak ada statement yang di jalankan.
Contoh pemrograman yang menggunakan fungsi setup sebagai berikut:
Void setup () {
pinMode(3,OUTPUT) ; // men-set “pin” 3 sebagai Output pinMode(6, INPUT); // men-set pin 6 sebagai Input Serial.begin(9600);
}
Keterangan:
o pinMode() = berfungsi untuk mengatur fungsi sebuah pin sebagai INPUT atau
OUTPUT.
o Serial.begin(9600) = digunakan untuk mengaktifkan fitur UART dan
menginisialisasinya.
2.6.2. Loop
Setelah melakukan fungsi setup() maka secara langsung akan melakukan fungsi loop() secara berurutan dan melakukan instruksi-instruksi ayang ada dalam fungsi loop().
void loop() {
If (digitalRead(6)==HIGH) // membaca input digital pin 6 {
xstart = millis(); //aktifkan timer
digitalWrite(3, HIGH); // nyalakan pin 3 delay(1000); // pause 1detik
digitalWrite(3, LOW); // matikan pin 3 }
}
Keterangan:
digitalWrite : Untuk memberikan nilai LOW dan HIGH pada sebuah pin output. Delay : Untuk memberikan waktu tunda dalam satuan millisekon.
digitalRead : Untuk membaca logika LOW dan HIGH.
2.6.3. Struktur Pengaturan program
Program sangat tergantung pada pengaturan apa yang akan dijalankan berikutnya, berikut ini adalah elemen dasar pengaturan program:
if..else, dengan format seperti berikut ini:
if (kondisi) { } else if (kondisi) { } else { }
Dengan struktur seperti diatas program akan menjalankan kode yang ada di dalam kurung kurawal jika kondisinya TRUE, dan jika tidak (FALSE) maka akan diperiksa apakah kondisi pada else if dan jika kondisinya FALSE maka kode pada else yang akan dijalankan.
for, dengan format seperti berikut ini: for (int i = 0; i < #pengulangan; i++) { }
Digunakan bila anda ingin melakukan pengulangan kode di dalam kurung kurawal beberapa kali, ganti #pengulangan dengan jumlah pengulangan yang diinginkan. Melakukan penghitungan ke atas dengan i++ atau ke bawah dengan i–.
2.6.4. Input/Output Digital a. pinMode(pin, mode)
Digunakan untuk menetapkan mode dari suatu pin, pin adalah nomor pin yang akan digunakan dari 0-19 (pin analog 0-5 adalah 14-19). Mode yang bisa digunakan adalah INPUT atau OUTPUT.
b. digitalWrite(pin, value)
Ketika sebuah pin ditetapkan sebagai OUTPUT, pin tersebut dapat dijadikan HIGH (ditarik menjadi 5 volts) atau LOW (diturunkan menjadi ground).
c. digitalRead(pin)
Ketika sebuah pin ditetapkan sebagai INPUT maka anda dapat menggunakan kode ini untuk mendapatkan nilai pin tersebut apakah HIGH (ditarik menjadi 5 volts) atau LOW (diturunkan menjadi ground).
2.6.5. Input/Output Analog
Arduino adalah mesin digital tetapi mempunyai kemampuan untuk beroperasi di dalam alam analog (menggunakan trik). Berikut ini cara untuk menghadapi hal yang bukan digital.
analogWrite(pin, value)
Beberapa pin pada Arduino mendukung PWM (pulse width modulation) yaitu pin 3, 5, 6, 9, 10, 11. Ini dapat merubah pin hidup (on) atau mati (off) dengan sangat cepat sehingga membuatnya dapat berfungsi layaknya keluaran analog. Value (nilai) pada format kode tersebut adalah angka antara 0 ( 0% duty cycle ~ 0V) dan 255 (100% duty cycle ~ 5V).
analogRead(pin)
Ketika pin analog ditetapkan sebagai INPUT anda dapat membaca keluaran voltase-nya. Keluarannya berupa angka antara 0 (untuk 0 volts) dan 1024 (untuk 5 volts).
2.7. FLOWCHART
Flowchart adalah bagan- bagan yang mempunyai arus yang menggambarkan langkah- langkah penyelesaian suatu masalah.Bagan alir program (program flowchart) adalah suatu bagan yang menggambarkan arus logika dari data yangkan diproses dalam suatu program dari awal sampai akhri.Bagan alir terdiri dari simbol-simbol yang mewakili fungsi-fungsi langkah program dan garis alir (flowlines) menujukan urutan dari simbol-simbol yang akan dikerjakan.
Flowchart dalam Bahasa Indonesia diterjemahkan sebagai Diagram Alir. Dari dua kata ini, maka dapat kita bayangkan bahwa flowchart itu berbentuk diagram yang bentuknya dapat mengalirkan sesuatu. Hal ini memang benar, flowchart memang melukiskan suatu aliran kegiatan dari awal hingga akhir mengenai suatu langkah-langkah dalam penyelesaian suatu masalah. Masalah tersebut bisa bermacam-macam, mulai dari masalah yang sederhana sampai yang kompleks. Masalah yang kita pelajari tentu saja masalah pemrograman dengan menggunakan komputer, tetapi secara logika dapat kita awali dengan mengamati permasalahan dalam kehidupan sehari-hari kita.
Contoh sederhananya adalah masalah membuat secangkir kopi. Dalam membuat secangkir kopi, tentu saja diperlukan langkah-langkah yang berurutan agar hasilnya dapat sesuai dengan apa yang kita inginkan, yaitu secangkir kopi. Demikian halnya dalam memprogram, diperlukan suatu algoritma (urutan langkah-langkah logis penyelesaian masalah yang disusun secara sistematis) agar program yang kita buat dapat berjalan dan memberikan hasil yang valid.Nah, untuk merepresentasikan algoritma itulah kita gunakan flowchart.
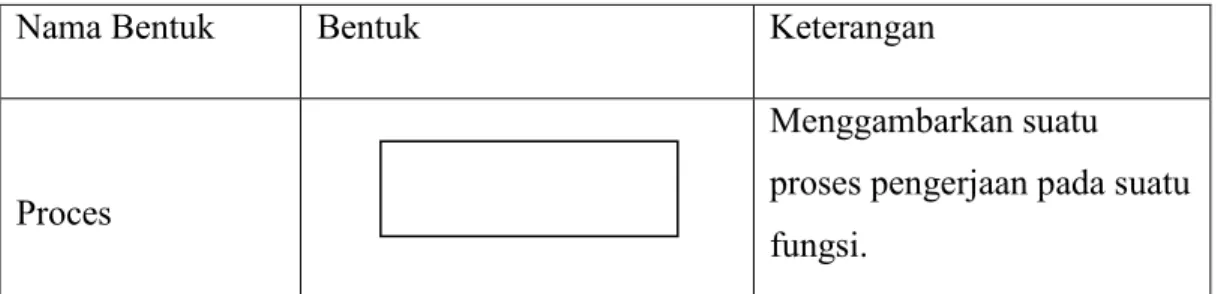
Tabel 2.2. Diagram FlowChart
Nama Bentuk Bentuk Keterangan
Proces
Menggambarkan suatu proses pengerjaan pada suatu fungsi.
Terminator
Menunjukan awal dan akhri dari diagram alir
Decision
Mempresentasikan pilihan kondisi dimana dari tempat ini diagram alir dapat bercabang menjadi dua atau lebih alur berbeda.
Data
Mempresentasikan data input atau output
Connector
Mempresentasikan
sambungan dari bagan alir yang terputus dihalaman lainnya.
Connector
Mempresentasikan
sambungan dari bagan alir yang terputus dihalaman yang sama.
Predifined prosess
Mempresentasikan suatu operasi yang rinciannya ditunjukan ditempat lain.
Flow line Menunjukan arah alur dan
menghubungkan setiap bagian diagram alir.
2.8. RTC
RTC (Real Time Clock) merupakan sebuah rangkaian jam elektronik berupa chip yang berguna untuk menghitung waktu (mulai detik hingga tahun) dengan tingkat akurasi tinggi dan kemudian menyimpannya dengan real time. Karena jam
tersebut bekerja real time, maka setelah proses perhitungan waktu dilakukan output
datanya sebagai parameter waktu.
Seluruh desain memberikan ide singkat tentang interfacing dari Real-Time Clock ke mikrokontroler AT89C55 menggunakan I2C protokol yang bekerja dalam konfigurasi master-budak. Jam real time pada dasarnya adalah seperti jam tangan itu berjalan karna baterai dan waktu tetap berjalan bahkan ketika ada kegagalan daya. Menggunakan RTC, adalah mungkin untuk melacak jadwal lama, bahkan jika mikrokontroler diprogram atau terputus dari serial bus atau steker listrik [7].
RTC DS1307 merupakan serial RTC yang menyediakan informasi detik, menit, jam, hari ,bulan, dan tahun. Akhir dari bulan otomatis disesuaikan untuk bulan yang kurang dari 31 hari, termasuk pmbenaran untuk lompatan tahun saat diset ulang. Jam dapat beroperasi dengan format 24 jam maupun 12 jamAM/PM. DS1307 juga memiliki rangkaian deteksi tegangan drop dan secara otomatis akan berganti ke battery backup.
2.9. MOTOR SERVO
Motor servo terdiri dari sebuah motor DC, serangkaian gear, sebuah output shaft dan sebuah rangkaian control elektronik yang mengubah tenaga listrik menjadi energy gerak. Biasanya hampir semua motor DC menghasilkan gerakan berputar, secara linier langsung menghasilkan gaya dan gerak garik lurus.
Biasanya, motor servo berbentuk kotak segi empat dengan sebuah output shaft motor dan konektor dengan 3 kabel yaitu power, control dengan ground. Gear motor servo ada yang terbuat dari plastic, metal atau titanium. Didalam motor servo terdapat potensiometer yang digunakan sebagai sensor posisi. Potensiaometer tersebut dihubungkan dengan output shaft untuk mengetahiu posisi actual shaft, Kontrol otomatis DC motor servo dalam hal sudut rotasi telah memainkan peran
penting dalam maju Electromechanical Engineering. Saat ini, proses otomatis kontrol motor menggunakan Personal Computer (PC) yang biasa digunakan. Kontroler dirancang untuk antarmuka antara komputer dan motor[8].
DC sistem motor servo memiliki karakteristik yang tidak pasti dan nonlinear yang menurunkan kinerja kontroler. Berdasarkan alasan ini, Sliding Mode Control (SMC) adalah salah satu strategi pengendalian populer dan teknologi kontrol yang kuat untuk menangani sistem pasti nonlinear. Dalam karya ini, controller berdasarkan Sliding Pengendali Mode Integral (ISMC) diusulkan dan dirancang untuk mengendalikan motor DC dalam servo drive [9].
Ketika motor DC berputar, maka output shaft juga berputar dan sekaligus memutar potensiometer. Rangkaian control kemudian dapat membaca kondisi potensiaometer tersebut dengan mengetahui posisi aktual shaft. Jika posisinya sesuai dengan yang diinginkan, mka motor Dc akan berhenti. Sudut operasi motor servo(Operating Angle) bervariasi tergantung jenis motor servo. Ada 2 jenis motor servo yaitu :
2.9.1. Motor Servo Standar
Yaitu motor servo yang mampu bergerak CW dan CCW dengan sudut operasi tertentu, misalnya 600, 900, atau 1800.
2.9.2. Motor Servo Continuous
Yaitu motor servo yang mampu bergerak CW dan CCW tanpa batasan sudut operasi (berputar secara kontinyu). Pada motor DC kumparan medan disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Jika tejadi putaran pada kumparan jangkar dalam pada medan magnet, maka akan timbul tagangan (GGL) yang berubah-ubah arah pada setiap setengah putaran, sehingga merupakan tegangan bolak-balik. Prinsip dari arus searah adalah membalik phasa negatif dari gelombang sinusoidal menjadi gelombang yang mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet, dihasilkan tegangan (GGL).