7
BAB II
LANDASAN TEORI
2.1 Bendungan
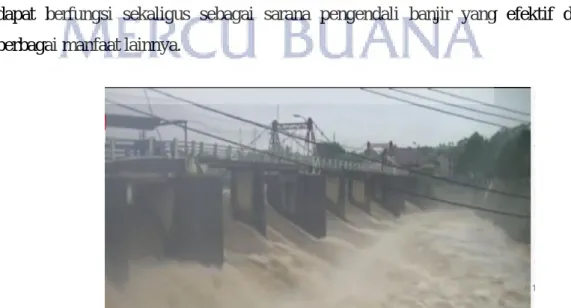
Bendungan adalah suatu bangunan air yang dibangun khusus untuk membendung (menahan) aliran air yang berfungsi untuk memindahkan aliran air atau menampung sementara dalam jumlah tertentu kapasitas/volume air dengan menggunakan struktur timbunan tanah homogen (Earthfill Dam), timbunan batu dengan lapisan kedap air (Rockfill Dam), konstruksi beton (Concrete Dam) atau berbagai tipe konstruksi lainnya. Pembangunan suatu bendungan bertujuan untuk menampung dan kemudian mendayagunakan air yang melimpah pada musim hujan untuk keperluan pertanian dan berbagai keperluan lainnya pada saat musim kemarau. Dalam satu tahun, persediaan air di alam khususnya di Indonesia berubah – ubah, pada musim penghujan air sangat melimpah sedangkan pada saat musim kemarau tiba air sangat langka. Dengan kapasitas tampungan yang besar dan elevasi muka air yang tinggi, sebuah bendungan selain dapat mengatur besar aliran sungai di sebelah hilirnya agar menjadi lebih merata sepanjang tahun, juga dapat berfungsi sekaligus sebagai sarana pengendali banjir yang efektif dan berbagai manfaat lainnya.
Bendungan mempunyai bermacam – macam jenis dan berbagai manfaat. Beberapa macam jenis bendungan diantaranya adalah :
1. Tipe bendungan berdasarkan tujuan pembangunannya :
a. Bendungan dengan tujuan tunggal ( single purpose dam ) adalah bendungan yang dibangun untuk memenuhi satu tujuan saja, misalnya untuk pembangkit tenaga listrik, irigasi, pengendali banjir, atau tujuan lainnya tetapi hanya untuk satu tujuan saja
b. Bendungan serbaguna ( multipurpose dam ) adalah bendungan yang dibangun untuk memenuhi beberapa tujuan, misalnya : pembangkit tenaga listrik (PLTA) dan irigasi, pengendali banjir dan PLTA, air minum dan irigasi, air baku, PLTA dan irigasi dan lain sebagainya. 2. Tipe bendungan berdasarkan penggunaannya :
a. Bendungan penampung air (storage dam) adalah bendungan yang digunakan untuk menyimpan air pada masa surplus dan dipergunakan pada masa kekurangan, termasuk dalam bendungan penampung adalah tujuan rekreasi, perikanan, pengendali banjir dan lain – lain.
b. Bendungan pembelok (diversion dam) adalah bendungan yang digunakan untuk meninggikan muka air, biasanya untuk keperluan mengalirkan air ke dalam sistem aliran menuju ke tempat yang memerlukan.
c. Bendungan penahan (detention dam) adalah bendungan yang digunakan untuk memperlambat dan mengusahakan seminimal mungkin efek aliran banjir yang mendadak. Air ditampung secara berkala / sementara, dialirkan melalui pelepasan (outlet). Air ditahan selama mungkin dan dibiarkan meresap di daerah sekitarnya.
3. Tipe bendungan berdasarkan jalannya air
a. Bendungan untuk dilewati air (overflow dam) adalah bendungan yang dibangun untuk dilimpasi air pada bangunan pelimpah (spillway). b. Bendungan untuk menahan air (non overflow dam) adalah bendungan
yang sama sekali tidak boleh dilimpasi air. 4. Tipe bendungan berdasarkan material pembentuknya
a. Bendungan urugan (rock fill dam, embankment dam) adalah bendungan yang dibangun dari hasil penggalian bahan (material) tanpa tambahan bahan lain yang bersifat campuran secara kimiawi, jadi betul – betul bahan pembentuk bangunan asli. Bendungan ini masih dibagi lagi menjadi dua yaitu bendungan urugan serba sama (homogeneous dam) adalah bendungan apabila bahan yang membentuk tubuh bendungan tersebut terdiri dari tanah yang hampir sejenis dan mempunyai gradasi (susunan ukuran butiran) hampir seragam. Kedua adalah bendungan zonal, adalah bendungan apabila timbunan yang membentuk tubuh bendungan terdiri dari batuan dengan gradasi (susunan ukuran butiran) yang berbeda – beda dalam urut – urutan pelapisan tertentu.
b. Bendungan beton (concrete dam) adalah bendungan yang dibuat dari konstruksi beton baik dengan tulangan maupun tidak. Kemiringan permukaan hulu dan hilir tidak sama pada umumnya bagian hilir lebih landai dan bagian hulu mendekati vertikal dan bentuknya ramping. Bendungan ini dibagi lagi menjadi dua yaitu bendungan beton berdasarkan berat sendiri stabilitas tergantung pada massanya, bendungan beton dengan penyangga (buttress dam) dimana permukaan hulu menerus dan di hilirnya pada jarak tertentu ditahan, bendungan berbentuk lengkung serta bendungan beton kominasi.
Beberapa manfaat yang mampu diberikan sebuah bendungan diantaranya adalah :
1. Irigasi Pada saat musim hujan, air hujan yang turun di daerah tangkapan air sebagian besar akan mengalir ke sungai-sungai, air itu dapat ditampung sehingga pada musim kemarau air yang tertampung tersebut dapat dimanfaatkan untuk berbagai keperluan, antara lain untuk irigasi lahan pertanian.
2. Penyediaan Air Baku Waduk selain sebagai sumber untuk pengairan persawahan juga dimanfaatkan sebagai bahan baku air minum dimana diperkotaan sangat langka dengan air bersih.
3. Sebagai PLTA Dalam menjalankan fungsinya sebagai PLTA, waduk dikelola untuk mendapatkan kapasitas listrik yang dibutuhkan. Pembangkit listrik tenaga air (PLTA) adalah suatu sistem pembangkit listrik yang biasanya terintegrasi dalam bendungan dengan memanfaatkan energi mekanis aliran air untuk memutar turbin, diubah menjadi energi listrik melalui generator.
4. Pengendali Banjir Sungai dengan debit air yang besar jika tidak dikendalikan dengan cermat maka akan membahayakan masyarakat sekitar sungai itu sendiri, maka permasalahan itu dapat dijadikan sebagai latarbelakang dari pendirian waduk. Pada saat musim hujan, air hujan yang turun di daerah tangkapan air sebagian besar akan mengalir ke sungai-sungai yang pada akhirnya akan mengalir ke hilir sungai yang tidak jarang mengakibatkan banjir di kawasan hilir dari sungai tersebut, apabila kapasitas tampung bagian hilir sungai tidak memadai. Dengan dibangunnya bendungan-bendungan di bagian hulu sungai maka kemungkinan terjadinya banjir pada musim hujan dapat dikurangi dan pada musim kemarau air yang tertampung tersebut dapat dimanfaatkan untuk berbagai keperluan, antara lain untuk pembangkit listrik tenaga air, untuk irigasi lahan pertanian, untuk perikanan, untuk pariwisata dan lain sebagainya.
5. Perikanan Untuk mengganti mata pencaharian para penduduk desa yang desanya ditenggelamkan untuk pembuatan waduk yang dulu
bermata pencaharian sebagai petani sekarang beralih ke dunia perikanan dengan memanfaatkan waduk ini para penduduk dapat membuat rumah apung yang digunakan untuk peternakan ikan air tawar jadi ikan - ikan itu dipelihara di dalam jaring apung ataupun dalam karamba – karamba.
6. Pariwisata dan Olahraga Air Dengan pemandangan yang indah waduk juga dapat dimanfaatkan sebagai tempat rekreasi dan selain tempat rekreasi juga dimanfaatkan sebagai tempat olahraga air maupun sebagai tempat latihan para atlet olahraga air.
Berikut ini adalah beberapa metode yang digunakan untuk mendapatkan informasi ketinggian permukaan air pada bendungan.
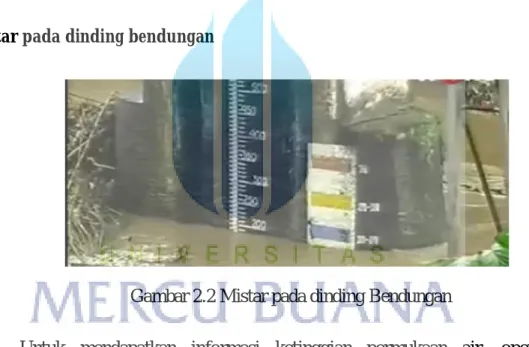
Mistar pada dinding bendungan
Gambar 2.2 Mistar pada dinding Bendungan
Untuk mendapatkan informasi ketinggian permukaan air, operator memantau ke bendungan dengan melihat mistar yang dipasang pada dinding bendungan. Dengan mengetahui ketinggian air tersebut, masing-masing ruang kontrol antar bendungan akan saling memberikan data melalui radio HT untuk menentukan prosentase buka/tutup pintu air pada bendungan.
Water Level Control
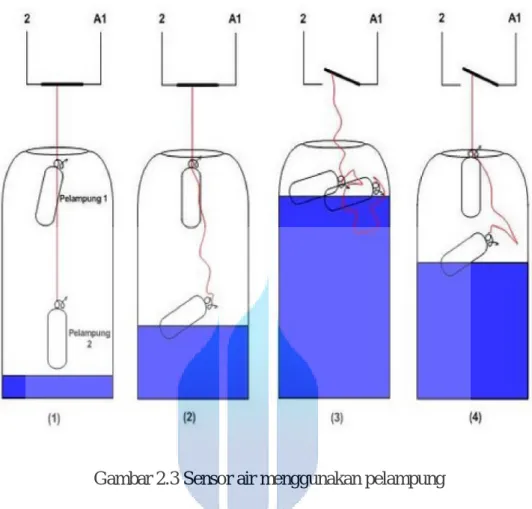
Gambar 2.3 Sensor air menggunakan pelampung
Sensor air menggunakan pelampung yang berfungsi untuk mendeteksi level ketinggian air pada bendungan. Pelampung akan bergerak sesuai dengan level ketinggian air yang menekan dari bawah, seperti ditunjukkan dalam gambar 2.3. Pada perancangan sensor air menggunakan pelampung yang berfungsi untuk mendeteksi level ketinggian air pada bendungan. Pelampung akan bergerak sesuai dengan level ketinggian air yang menekan dari bawah. Seperti ditunjukkan dalam gambar 2.3. Pelampung 1 berfungsi sebagai batas atas air dan Pelampung 2 berfungsi sebagai batas bawah akan menggantung pada sebuah tali pelampung sehingga menyebabkan kontak pelampung yang berada di antara 2 dan A1 akan menutup karena gaya berat dari kedua pelampung. Ketika level air mulai naik maka pelampung 2 akan terangkat ke atas atau terapung. Seiring dengan semakin bertambahnya level air maka Pelampung 2 akan semakin bergerak ke atas sesuai dengan bertambahnya air. Apabila level air telah sampai pada Pelampung 1, maka
Pelampung 1 akan terangkat ke atas atau terapung bersama-sama dengan pelampung 2. Akibatnya, kontak pelampung antara 2 dan A1 akan membuka.
2.2 Mikrokontroler
Mikrokontroler adalah sebuah sistem komputer fungsional dalam sebuah chip. Di dalamnya terkandung sebuah inti prosesor, memori (sejumlah kecil RAM, memori program, atau keduanya), dan perlengkapan input output. Dengan kata lain, mikrokontroler adalah suatu alat elektronika digital yang mempunyai masukan dan keluaran serta kendali dengan program yang bisa ditulis dan dihapus dengan cara khusus, cara kerja mikrokontroler sebenarnya membaca dan menulis data.
Seperti umumnya komputer, mikrokontroler sebagai alat yang mengerjakan perintah-perintah yang diberikan kepadanya. Artinya, bagian terpenting dan utama dari suatu sistem komputerisasi adalah program itu sendiri yang dibuat oleh seorang programmer. Program ini memerintahkan komputer untuk melakukan jalinan yang panjang dari aksi-aksi sederhana untuk melakukan tugas yang lebih kompleks yang diinginkan oleh programmer. Sistem dengan mikrokontroler umumnya menggunakan piranti input yang jauh lebih kecil seperti saklar atau keypad kecil. Hampir semua input mikrokontroler hanya dapat memproses sinyal input digital dengan tegangan yang sama dengan tegangan logika dari sumber.
Mikrokonktroler digunakan dalam produk dan alat yang dikendalikan secara automatis, seperti sistem kontrol mesin, remote controls, mesin kantor, peralatan rumah tangga, alat berat, dan mainan. Dengan mengurangi ukuran, biaya, dan konsumsi tenaga dibandingkan dengan mendesain menggunakan mikroprosesor memori, dan alat input output yang terpisah, kehadiran mikrokontroler membuat kontrol elektrik untuk berbagai proses menjadi lebih ekonomis. Dengan penggunaan mikrokontroler ini maka :
• Sistem elektronik akan menjadi lebih ringkas.
• Rancang bangun sistem elektronik akan lebih cepat karena sebagian besar dari sistem adalah perangkat lunak yang mudah dimodifikasi. • Pencarian gangguan lebih mudah ditelusuri karena sistemnya yang
kompak.
Agar sebuah mikrokontroler dapat berfungsi, maka mikrokontroler tersebut memerlukan komponen eksternal yang kemudian disebut dengan sistem minimum. Untuk membuat sistem minimal paling tidak dibutuhkan sistem clock dan reset, walaupun pada beberapa mikrokontroler sudah menyediakan sistem clock internal, sehingga tanpa rangkaian eksternal pun mikrokontroler sudah beroperasi. Yang dimaksud dengan sistem minimal adalah sebuah rangkaian mikrokontroler yang sudah dapat digunakan untuk menjalankan sebuah aplikasi. Sebuah IC mikrokontroler tidakakan berarti bila hanya berdiri sendiri. Pada dasarnya sebuah sistem minimal mikrokontroler AVR memiliki prinsip yang sama.
Perkembangan teknologi telah maju dengan pesat dalam perkembangan dunia elektronika dan komunikasi. Penemuan silikon menyebabkan bidang ini mampu memberikan sumbangan yang amat berharga bagi perkembangan teknologi modern. Atmel sebagai salah satu vendor yang mengembangkan dan memasarkan produk mikroelektronika telah menjadi suatu teknologi standar bagi para desainer sistem elektronika masa kini. Tidak seperti sistem komputer, yang mampu menangani berbagai macam program aplikasi (misalnya pengolah kata, pengolah angka dan lain sebagainya), mikrokontroler hanya bisa digunakan untuk satu aplikasi tertentu saja. Perbedaan lainnya terletak pada perbandingan RAM dan ROM-nya. Pada sistem komputer perbandingan RAM dan ROM-nya besar, artinya program-program pengguna disimpan dalam ruang RAM yang relatif besar dan rutin-rutin antarmuka perangkat keras disimpan dalam ruang ROM yang kecil. Sedangkan pada mikrokontroler, perbandingan ROM dan RAM-nya yang besar artinya program kontrol disimpan dalam ROM (bisa Masked ROM atau Flash PEROM) yang ukurannya relatif lebih besar, sedangkan RAM digunakan
sebagai tempat penyimpanan sementara, termasuk register-register yang digunakan pada mikrokontroler yang bersangkutan.
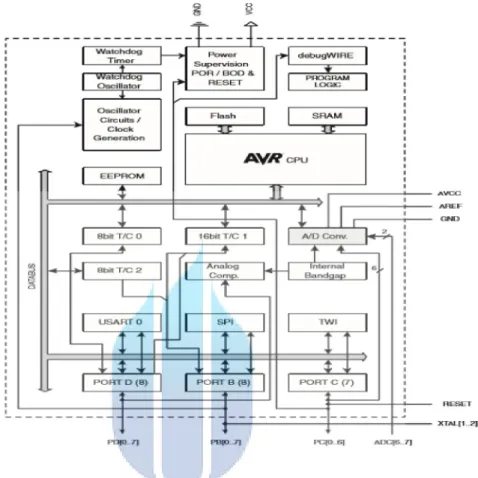
Gambar 2.4 Diagram Fungsional Mikrokontroler ATMega 328
ATMega328 adalah mikrokontroller keluaran dari atmel yang mempunyai arsitektur RISC (Reduce Instruction Set Computer) yang dimana setiap proses eksekusi data lebih cepat dari pada arsitektur CISC (Completed Instruction Set Computer). Mikrokontroller ini memiliki beberapa fitur antara lain :
• 131 macam instruksi yang hampir semuanya dieksekusi dalam satu siklus clock.
• 32 x 8-bit register serba guna.
• Kecepatan mencapai 20 MIPS dengan clock 20 MHz.
• Memori Flash (Program) dengan kapasitas hingga 32 Kb dengan ketahanan penulisan 10.000 kali penulisan.
• Memiliki EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 1KB dengan ketahanan 100.000 kali penulisan.
• Memiliki SRAM (Static Random Access Memory) sebesar 2KB. • Dua buah 8 bit counter/timer dengan prescaler dan mode pembanding. • Satu buah 16 bit counter/timer dengan prescaler,mode pembanding dan
mode capture • 6 kanal PWM • 8 kanal 10-bit ADC • Speed
• Master / Slave SPI Serial interface.
Mikrokontroller ATmega 328 memiliki arsitektur Harvard, yaitu memisahkan memori untuk kode program dan memori untuk data sehingga dapat memaksimalkan kerja dan parallelism. Instruksi – instruksi dalam memori program dieksekusi dalam satu alur tunggal, dimana pada saat satu instruksi dikerjakan instruksi berikutnya sudah diambil dari memori program. Konsep inilah yang memungkinkan instruksi – instruksi dapat dieksekusi dalam setiap satu siklus clock. 32 x 8-bit register serba guna digunakan untuk mendukung operasi pada ALU ( Arithmatic Logic unit ) yang dapat dilakukan dalam satu siklus. 6 dari register serbaguna ini dapat digunakan sebagai 3 buah register pointer 16-bit pada mode pengalamatan tidak langsung untuk mengambil data pada ruang memori data.
Ketiga register pointer 16-bit ini disebut dengan register X ( gabungan R26 dan R27 ), register Y ( gabungan R28 dan R29 ), dan register Z ( gabungan R30 dan R31 ). Hampir semua instruksi AVR memiliki format 16-bit. Setiap alamat memori program terdiri dari instruksi 16-bit atau 32-bit. Selain register serba guna di atas, terdapat register lain yang terpetakan dengan teknik memory mapped I/O selebar 64 byte. Beberapa register ini digunakan untuk fungsi khusus antara lain sebagai register control Timer/ Counter, Interupsi, ADC, USART, SPI, EEPROM, dan fungsi I/O lainnya. Register – register ini menempati memori pada alamat 0x20h – 0x5Fh.
Berikut ini adalah architecture ATMega328
Gambar 2.5. Architecture ATMega 328 2.3 Arduino
Arduino yang digunakan dalam penelitian ini adalah Iteaduino. Iteaduino adalah board mikrokontroler berbasis ATmega328. Iteaduino dirancang berdasarkan skema Duemilanove. Iteaduino Uno memiliki 14 pin input/output yang mana 6 pin dapat digunakan sebagai output PWM, 6 analog input, crystal osilator 16 MHz, koneksi USB, jack power, ICSP header, dan tombol reset. Iteaduino mampu men-support mikrokontroller; dapat dikoneksikan dengan komputer menggunakan kabel USB.
Gambar 2.6 Tampak depan Iteaduino
Iteaduino dapat dibuat sebuah sistem atau perangkat fisik menggunakan software dan hardware yang sifatnya interaktif, yaitu dapat menerima rangsangan dari lingkungan dan merespon balik. Konsep untuk memahami hubungan yang manusiawi antara lingkungan yang sifat alaminya adalah analog dengan dunia digital, disebut dengan physical computing. Pada praktiknya konsep ini diaplikasikan dalam desain alat atau projek-projek yang menggunakan sensor dan microcontroller untuk menerjemahkan input analog ke dalam sistem software untuk mengontrol gerakan alat-alat elektro-mekanik. Beberapa fasilitas yang diberikan oleh Iteaduino adalah sebagai berikut :
1. Pin input/output digital (0-13)
Terdapat 14 pin yang berfungsi sebagai input atau output, dapat diatur oleh program. Untuk 6 buah pin 3, 5, 6, 9, 10 dan 11, dapat juga berfungsi sebagai pin analog output dimana tegangan output-nya dapat diatur. Nilai sebuah pin output analog dapat diprogram antara 0 – 255, dimana hal itu mewakili nilai tegangan 0 – 5V.
2. USB (Universal Serial Bus)
Fasilitas USB yang diberikan oleh Iteaduino ini memiliki fungsi diantaranya :
1. Memuat progam dari komputer kedalam papan 2. Komunikasi serial antara papan dan komputer 3. Memberikan daya listrik kedalam papan 3. Sambungan SV1
Merupakan sambungan atau jumper untuk memilih sumber daya papan, apakah dari sumber eksternal atau menggunakan USB. Sambungan ini tidak diperlukan lagi pada papan Iteaduino versi terakhir karena pemilihan sumber daya eksternal atau USB dilakukan secara otomatis.
4. Q1 – Kristal (quartz crystal oscillator)
Jika microcontroller dianggap sebagai sebuah otak, maka kristal adalah jantungnya karena komponen ini menghasilkan detak-detak yang dikirim kepada microcontroller agar melakukan sebuah operasi untuk setiap detaknya. Kristal ini dipilih yang berdetak 16 juta kali per detik (16MHz). 5. Tombol reset S1
Tombol ini berfungsi untuk me-reset papan sehingga program akan mulai lagi dari awal, tombol reset ini bukan untuk menghapus program atau mengosongkan microcontroller.
6. In-Circuit Serial Programming (ICSP)
Port ICSP memungkinkan pengguna untuk memprogram microcontroller secara langsung, tanpa melalui bootloader. Umumnya pengguna Iteaduino tidak melakukan ini sehingga ICSP tidak terlalu dipakai walaupun disediakan.
7. IC 1 – Microcontroller Atmega
Komponen utama dari papan Iteaduino, di dalamnya terdapat CPU, ROM dan RAM.
8. X1 – sumber daya eksternal
Jika hendak disuplai dengan sumber daya eksternal, papan Iteaduino dapat diberikan tegangan DC antara 9-12V.
9. 6 pin input analog (0-5)
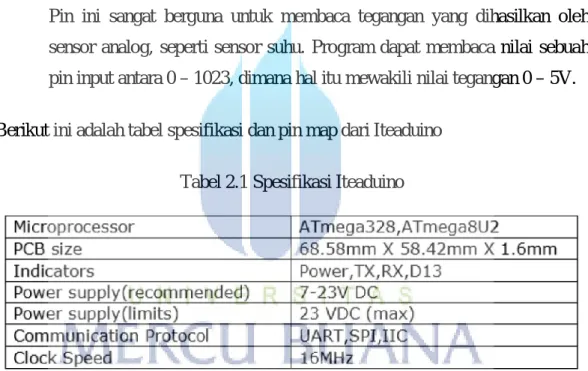
Pin ini sangat berguna untuk membaca tegangan yang dihasilkan oleh sensor analog, seperti sensor suhu. Program dapat membaca nilai sebuah pin input antara 0 – 1023, dimana hal itu mewakili nilai tegangan 0 – 5V. Berikut ini adalah tabel spesifikasi dan pin map dari Iteaduino
Tabel 2.2 Pin Map Iteaduino
2.3.1 Tutorial Bahasa Pemrograman Arduino
Arduino menggunakan pemrograman dengan bahasa C. Berikut ini adalah sedikit penjelasan yang ditujukan kepada anda yang hanya mempunyai sedikit pengalaman pemrograman dan membutuhkan penjelasan singkat mengenai karakter bahasa C dan software Arduino. Untuk penjelasan yang lebih mendalam, web Arduino.cc adalah sumber yang lengkap.
Struktur
Setiap program Arduino (biasa disebut sketch) mempunyai dua buah fungsi yang harus ada.
• void setup( ) { }
o Semua kode didalam kurung kurawal akan dijalankan hanya satu kali ketika program Arduino dijalankan untuk pertama kalinya. • void loop( ) { }
o Fungsi ini akan dijalankan setelah setup (fungsi void setup) selesai. Setelah dijalankan satu kali fungsi ini akan dijalankan lagi, dan lagi secara terus menerus sampai catu daya (power) dilepaskan.
Syntax
Berikut ini adalah elemen bahasa C yang dibutuhkan untuk format Penulisan.
• //(komentar satu baris)
o Kadang diperlukan untuk memberi catatan pada diri sendiri apa arti dari kode-kode yang dituliskan. Cukup menuliskan dua buah garis miring dan apapun yang kita ketikkan dibelakangnya akan diabaikan oleh program.
• /* */(komentar banyak baris)
o Jika anda punya banyak catatan, maka hal itu dapat dituliskan pada beberapa baris sebagai komentar. Semua hal yang terletak di antara dua simbol tersebut akan diabaikan oleh program.
• { }(kurung kurawal)
o Digunakan untuk mendefinisikan kapan blok program mulai dan berakhir (digunakan juga pada fungsi dan pengulangan).
• ;(titk koma)
o Setiap baris kode harus diakhiri dengan tanda titik koma (jika ada titik koma yang hilang maka program tidak akan bisa dijalankan). Variabel
Sebuah program secara garis besar dapat didefinisikan sebagai instruksi untuk memindahkan angka dengan cara yang cerdas. Variabel inilah yang digunakan untuk memindahkannya.
• int (integer)
o Digunakan untuk menyimpan angka dalam 2 byte (16 bit). Tidak mempunyai angka desimal dan menyimpan nilai dari -32,768 dan 32,767.
• long (long)
o Digunakan ketika integer tidak mencukupi lagi. Memakai 4 byte (32 bit) dari memori (RAM) dan mempunyai rentang dari -2,147,483,648 dan 2,147,483,647.
• boolean (boolean)
o Variabel sederhana yang digunakan untuk menyimpan nilai TRUE (benar) atau FALSE (salah). Sangat berguna karena hanya menggunakan 1 bit dari RAM.
• float (float)
o Digunakan untuk angka desimal (floating point). Memakai 4 byte (32 bit) dari RAM dan mempunyai rentang dari -3.4028235E+38 dan 3.4028235E+38.
• char (character)
o Menyimpan 1 karakter menggunakan kode ASCII (misalnya ‘A’ = 65). Hanya memakai 1 byte (8 bit) dari RAM.
Operator Matematika
Operator yang digunakan untuk memanipulasi angka (bekerja seperti matematika yang sederhana).
• =
o Membuat sesuatu menjadi sama dengan nilai yang lain (misalnya: x = 10 * 2, x sekarang sama dengan 20).
• %
o Menghasilkan sisa dari hasil pembagian suatu angka dengan angka yang lain (misalnya: 12 % 10, ini akan menghasilkan angka 2). • +
• -
o Pengurangan • *
o Perkalian • /
o Pembagian Operator Pembanding Digunakan untuk membandingkan nilai logika.
• ==
o Sama dengan (misalnya: 12 == 10 adalah FALSE (salah) atau 12 == 12 adalah TRUE (benar))
• !=
o Tidak sama dengan (misalnya: 12 != 10 adalah TRUE (benar) atau 12 != 12 adalah FALSE (salah))
• <
o Lebih kecil dari (misalnya: 12 < 10 adalah FALSE (salah) atau 12 < 12 adalah FALSE (salah) atau 12 < 14 adalah TRUE (benar)) • >
o Lebih besar dari (misalnya: 12 > 10 adalah TRUE (benar) atau 12 > 12 adalah FALSE (salah) atau 12 > 14 adalah FALSE (salah))
Struktur Pengaturan
Program sangat tergantung pada pengaturan apa yang akan dijalankan berikutnya, berikut ini adalah elemen dasar pengaturan (banyak lagi yang lain dan bisa dicari di internet).
1. if..else, dengan format seperti berikut ini: if (kondisi) { }
else if (kondisi) { } else { }
Dengan struktur seperti diatas program akan menjalankan kode yang ada di dalam kurung kurawal jika kondisinya TRUE, dan jika tidak (FALSE) maka akan diperiksa apakah kondisi pada else if dan jika kondisinya FALSE maka kode pada else yang akan dijalankan.
2. for, dengan format seperti berikut ini: for (int i = 0; i < #pengulangan; i++) { }
Digunakan bila anda ingin melakukan pengulangan kode di dalam kurung kurawal beberapa kali, ganti #pengulangan dengan jumlah pengulangan yang diinginkan. Melakukan penghitungan ke atas dengan i++ atau ke bawah dengan i– .
Digital
1. pinMode(pin, mode)
Digunakan untuk menetapkan mode dari suatu pin, pin adalah nomor pin yang akan digunakan dari 0-19 (pin analog 0-5 adalah 14-19). Mode yang bisa digunakan adalah INPUT atau OUTPUT.
2. digitalWrite(pin, value)
Ketika sebuah pin ditetapkan sebagai OUTPUT, pin tersebut dapat dijadikan HIGH (ditarik menjadi 5 volts) atau LOW (diturunkan menjadi ground).
3. digitalRead(pin)
Ketika sebuah pin ditetapkan sebagai INPUT maka anda dapat menggunakan kode ini untuk mendapatkan nilai pin tersebut apakah HIGH (ditarik menjadi 5 volts) atau LOW (diturunkan menjadi ground).
Analog
Arduino adalah mesin digital tetapi mempunyai kemampuan untuk beroperasi di dalam alam analog (menggunakan trik). Berikut ini cara untuk menghadapi hal yang bukan digital.
1. analogWrite(pin, value)
Beberapa pin pada Arduino mendukung PWM (pulse width modulation) yaitu pin 3, 5, 6, 9, 10, 11. Ini dapat merubah pin hidup (on)atau mati (off) dengan sangat cepat sehingga membuatnya dapat berfungsi layaknya keluaran analog. Value (nilai) pada format kode tersebut adalah angka antara 0 ( 0% duty cycle ~ 0V) dan 255 (100% duty cycle ~ 5V).
2. analogRead(pin)
Ketika pin analog ditetapkan sebagai INPUT anda dapat membaca keluaran voltase-nya. Keluarannya berupa angka antara 0 (untuk 0 volts) dan 1024 (untuk 5 volts).
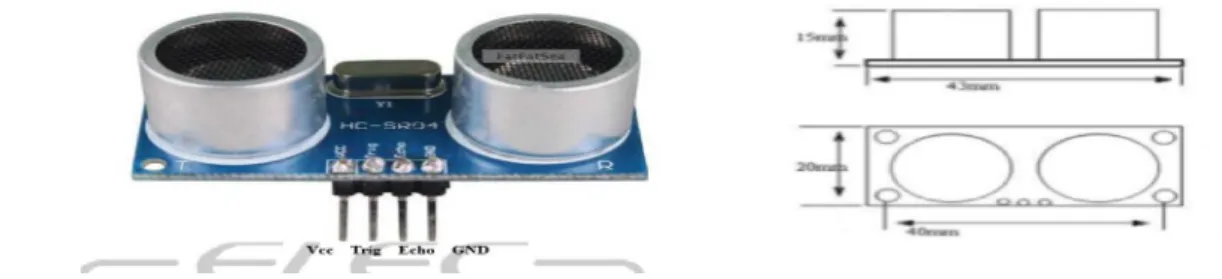
2.4 Sensor Jarak Ultrasonik HC-SR04
Modul HC-SR04 sensor Ultrasonik ini dapat mengukur jarak antara 2 cm sampai 400 cm. Keluaran dari modul sensor ultrasonik Ping ini berupa pulsa yang lebarnya merepresentasikan jarak. Lebar pulsanya yang dihasilkan modul sensor ultrasonik ini bervariasi dari 150 uS sampai 25 mS. Secara prinsip modul sensor ultrasonik ini terdiri dari sebuah chip pembangkit sinyal 40KHz, sebuah speaker ultrasonik dan sebuah mikropon ultrasonik. Speaker ultrasonik mengubah sinyal 40 KHz menjadi suara sementara mikropon ultrasonik berfungsi untuk mendeteksi pantulan suaranya. Bentuk sensor ultrasonik diperlihatkan pada gambar dibawah ini.
Gambar 2.7 Bentuk Sensor Ultrasonik
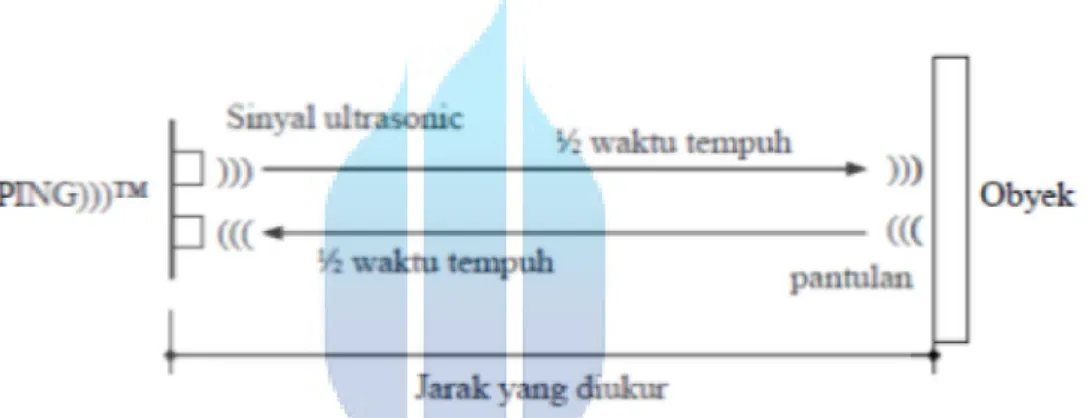
Sinyal output modul sensor ultrasonik dapat langsung dihubungkan dengan mikrokontroler tanpa tambahan komponen apapun. Modul sensor ultrasonik hanya akan mengirimkan suara ultrasonik ketika ada pulsa trigger dari mikrokontroler (Pulsa high selama 5µS). Suara ultrasonik dengan frekuensi sebesar 40KHz akan dipancarkan selama 200µS oleh modul sensor ultrasonik ini. Suara ini akan merambat di udara dengan kecepatan 344.424m/detik (atau 1cm setiap 29.034µS) yang kemudian mengenai objek dan dipantulkan kembali ke modul sensor ultrasonik tersebut. Selama menunggu pantulan sinyal ultrasonik dari bagian trasmiter, modul sensor ultrasonik ini akan menghasilkan sebuah pulsa. Pulsa ini akan berhenti (low) ketika suara pantulan terdeteksi oleh modul sensor ultrasonik. Oleh karena itulah lebar pulsa tersebut dapat merepresentasikan jarak antara modul sensor ultrasonik dengan objek.Prinsip kerja sensor ultrasonik (PING) tersebut dapat dilihat pada Gambar 2.8.
Berikut adalah rumus penghitungan waktu yang diperlukan modul sensor PING untuk menerima pantulan pada jarak tertentu.
S = (tIN x V) ÷ 2 (2.1) Dimana :
S = Jarak antara sensor ultrasonik dengan objek yang dideteksi V = Cepat rambat gelombang ultrasonik di udara (344 m/s)
tIN = Selisih waktu pemancaran dan penerimaan pantulan gelombang
Gambar 2.9 Ilustrasi Perhitungan Sensor Ultrasonik
HC-SR04 adalah sebuah modul yang berfungsi untuk melakukan pengukuran jarak suatu benda/ halangan dengan memanfaatkan sinyal suara ultrasonic. Performa yang stabil dan akurasi yang tinggi dengan harga yang murah merupakan kelebihan dari HC-SR04. Karena kelebihannya, HC-SR04 banyak dipakai dalam berbagai aplikasi pengukuran jarak.Berikut adalah spesifikasi dari HC-SR04:
a) Supply tegangan 5V DC. b) Arus Quiescent < 2mA. c) Sudut efektif < 15 derajat. d) Jarak pengukuran 2 – 500 cm. e) Resolusi 0.3 cm.
Berikut adalah pin dari HC-SR04 :
a) VCC : Input supply 5V
b) Trig : Input untuk memberikan pulsa trigger c) Echo : Output untuk pulsa Echo
d) GND : Input supply Ground Berikut adalah galeri HC-SR04 :
Gambar 2.10 Galeri HC-SR04
Untuk mengetahui kemampuan terbaik dan posisi ideal dari sensor ultrasonic dalam mengukur jarak digunakan sistem SODAR (Sound Detection and Ranging) ultrasonic dimana prinsip kerjanya adalah dengan memutar dua buah sensor ultrasonik sejauh 180o secara bolakbalik untuk men-scanning seluruh ruang. Sensor akan mengukur jarak objek setiap perubahan sudut 3o. Data hasil pengukuran akan dikirim ke program plotter pada komputer dengankomunikasi nirkabel. Plotter akan menampilkan koordinat tersebut dalam bentuk grafik polar yang mempresentasikan kondisi riil ruang.