BIFURKASI PADA MODEL INTERAKASI
TUMBUHAN DAN HERBIVORA
IRMA SAHARA
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT PERTANIAN BOGOR
BOGOR 2013
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa skripsi berjudul Bifurkasi pada Model Interaksi Tumbuhan dan Herbivora adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, Desember 2013
Irma Sahara
ABSTRAK
IRMA SAHARA. Bifurkasi pada Model Interaksi Tumbuhan dan Herbivora. Dibimbing oleh ALI KUSNANTO dan PAIAN SIANTURI.
Saha dan Bandyopadhyay (2005) memodelkan sistem mangsa-pemangsa yang merepresentasikan interaksi tumbuhan dan herbivora. Pada karya ilmiah ini, dicari bifurkasi yang terjadi dengan terlebih dulu menganalisis kestabilan titik tetap. Ada tiga titik tetap yang diperoleh dengan jenis kestabilan titik tetap ditentukan oleh nilai eigen yang diperoleh dari ketiga titik tetap tersebut. Titik tetap pertama dan kedua bersifat sadel dan terdapat empat kasus pada titik tetap ketiga agar mencapai kestabilan. Dengan pemilihan parameter tertentu, diperoleh bifurkasi Hopf yakni terjadinya perubahan kestabilan dari spiral stabil menjadi spiral tak stabil dan terdapat limit cycle pada titik tetap ketiga.
Kata kunci: bifurkasi Hopf, limit cycle, model interaksi tumbuhan dan herbivora.
ABSTRACT
IRMA SAHARA. Bifurcation Existence in The Interaction Model of Plant and Herbivore. Supervised by ALI KUSNANTO and PAIAN SIANTURI.
Saha and Bandyopadhyay (2005) have modeled prey-predator systems that represent the interactions of plants and herbivores. In this paper, there are three fixed points obtained. The stability type of the fixed point is determined by the eigenvalues of each fixed point. Both first and second fixed points were found to be saddle points; and four cases were associated with the third fixed point. The Hopf bifurcation was obtained for the third fixed point, as the stability type was changed to be unstable spiraled previously stable spiraled. It was also found the existence of the cycle limit. Both of these were the indicators of existence of the Hopf bifurcation.
Keywords: bifurcation, bifurcation Hopf, cycle limit, interaction model of plant and herbivore.
Skripsi
sebagai salah satu syarat untuk memperoleh gelar Sarjana Sains
pada
Departemen Matematika
BIFURKASI PADA MODEL INTERAKSI
TUMBUHAN DAN HERBIVORA
IRMA SAHARA
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT PERTANIAN BOGOR
BOGOR 2013
Judul Skripsi : Bifurkasi pada Model Interaksi Tumbuhan dan Herbivora Nama : Irma Sahara
NIM : G54080082
Disetujui oleh
Drs Ali Kusnanto, MSi Dr Paian Sianturi
Pembimbing I Pembimbing II
Diketahui oleh
Dr Toni Bakhtiar, MSc Ketua Departemen
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah subhanahu wa ta’ala atas segala karunia-Nya sehingga karya ilmiah yang berjudul Bifurkasi pada Model Interaksi Tumbuhan dan Herbivora berhasil diselesaikan.
Terima kasih penulis ucapkan kepada ayah, ibu, kakak, serta seluruh keluarga besar atas dukungan, motivasi, kasih sayang dan doa yang tiada henti-hentinya. Ungkapan terima kasih juga disampaikan kepada Bapak Drs Ali Kusnanto, MSi dan Bapak Dr Paian Sianturi selaku pembimbing atas arahan, bimbingan, dan motivasi dalam menyelesaikan tugas akhir ini, kepada Bapak Ir Ngakan Komang Kutha Ardana, MSc yang telah banyak memberi saran dan perbaikan, serta kepada seluruh dosen dan staf Departemen Matematika IPB atas segala ilmu yang diberikan dan bantuannya selama perkuliahan. Tak lupa juga ucapan terima kasih kepada sahabat satu perjuangan Saefrudin, Hadi, dan Herlan serta IKADA, BEM FMIPA 2010, ADKESMAH BEM FMIPA 2011, BEM KM 2012, sahabat POKJA SPP 2012, koordinator POKJA SPP BEM FEMA 2012, Yayasan Karya Salemba Empat, Poliklinik IPB, teman-teman kosan Bara N0. 31, teman-teman satu pengajian, dan sahabat Matematika 42, 43, 44, 45, 46, 47, dan 48 yang telah banyak membantu dalam proses penyusunan tugas akhir ini.
Semoga karya ilmiah ini bermanfaat.
Bogor, Desember 2013
DAFTAR ISI
DAFTAR TABEL vi DAFTAR GAMBAR vi DAFTAR LAMPIRAN vi PENDAHULUAN 1 Latar Belakang 1 Tujuan 2 LANDASAN TEORI 2 PEMODELAN 5 PEMBAHASAN 6Penentuan Titik Tetap Model 6
Analisis Kestabilan Titik Tetap Model 6
Bifurkasi Hopf 9
SIMULASI 10
Dinamika Populasi Tumbuhan dan Herbivora Kasus 1 10 Dinamika Populasi Tumbuhan dan Herbivora Kasus 2 11 Dinamika Populasi Tumbuhan dan Herbivora Kasus 3 13 Dinamika Populasi Tumbuhan dan Herbivora Kasus 4 14
SIMPULAN 15
DAFTAR PUSTAKA 15
LAMPIRAN 16
DAFTAR TABEL
1 Kondisi kestabilan titik tetap 𝑇3 9
2 Titik tetap, nilai eigen, dan kestabilan 10
3 Titik tetap, nilai eigen, dan kestabilan 11
4 Titik tetap, nilai eigen, dan kestabilan 13
5 Titik tetap, nilai eigen, dan kestabilan 14
DAFTAR GAMBAR
1 Bidang fase kasus 1 11
2 Bidang fase kasus 2 12
3 Bidang fase kasus 2 dengan arah orbit dari dalam ke luar 12
4 Bidang fase kasus 3 13
5 Bidang fase kasus 4 dengan arah orbit dari luar ke dalam 14 6 Bidang fase kasus 4 dengan arah orbit dari dalam ke luar 14
DAFTAR LAMPIRAN
1 Penondimensionalan model 16
2 Penentuan titik tetap model interaksi tumbuhan dan herbivora 17
3 Penentuan nilai eigen 19
PENDAHULUAN
Latar Belakang
Pada suatu ekosistem, salah satu fenomena alami kehidupan adalah peristiwa makan dan dimakan antara individu yang satu dengan yang lainnya. Ada yang menjadi mangsa dan ada yang menjadi pemangsa. Salah satunya adalah interaksi antara tumbuhan (mangsa) dan herbivora (pemangsa) yang mana perilaku dinamis tumbuhan dan herbivora dapat dianalogikan seperti sistem mangsa-pemangsa (prey-predator system).
Interaksi yang lainnya yaitu kompetisi dan simbiosis. Kompetisi tejadi karena memperebutkan makanan yang sama, memperebutkan habitat yang sama atau memperebutkan pasangan untuk berkembang biak. Sedangkan simbiosis terjadi karena adanya hubungan yang erat antara dua jenis makhluk hidup yang berbeda sehingga masing masing makhluk hidup tersebut memilki ketergantungan terhadap makhluk hidup yang lain.Setiap makhluk hidup pasti akan membutuhkan makhluk hidup lainnya. Seiring dengan interaksi tersebut terdapat rangkaian peristiwa makan dan dimakan yang menjadikan ekosistem tetap seimbang karena tidak ada makhluk hidup yang dapat hidup terisolasi atau hidup tersendiri.
Menurut teori interaksi antara pemangsa dan yang dimangsa, hubungan antara tanaman dan herbivora adalah siklus. Ketika tumbuhan (mangsa) dalam jumlah banyak maka herbivora (pemangsa) meningkatkan jumlahnya, sehingga mengurangi populasi mangsa, yang pada gilirannya menyebabkan jumlah dari tumbuhan berkurang. Hal ini menunjukkan bahwa populasi herbivora berfluktuasi di sekitar kapasitas sumber makanan, dalam hal ini tumbuhan (Fatik 2010).
Beberapa faktor berperan ke dalam populasi dan membantu menstabilkan interaksi antara pemangsa dan yang dimangsa. Sebagai contoh, heterogenitas spasial dipertahankan, yang berarti akan selalu ada tanaman yang tidak ditemukan oleh herbivora. Proses ini memainkan peran yang sangat penting bagi herbivora yang memakan satu spesies tanaman dan mencegah herbivora ini menghabiskan sumber makanan mereka. Pertahanan tanaman juga membantu menstabilkan interaksi antara pemangsa dan yang dimangsa. Sebagai contoh tumbuhan mengeluarkan senyawa beracun atau berbahaya yang akan berdampak negatif pada
herbivora yang mengkonsumsinya sehingga herbivora tidak meyukainya.
Permasalahan dalam matematika dari model ekologi adalah penetapan syarat-syarat yang menjamin keunikan dari limit cycle model mangsa-pemangsa. Pada model dua dimensi diketahui bahwa bisa saja tidak ada limit cycle dari model kompetisi. Untuk jenis model mangsa-pemangsa, keberadaan dan stabilitas limit cycle terkait keberadaan dan stabilitas titik tetap positif. Jika titik tetap tidak ada maka populasi pemangsa cenderung mengalami kepunahan. Jika titik tetap positif ada dan tidak stabil maka harus muncul setidaknya satu limit cycle.
Saha dan Bandyopadhyay (2005) memodelkan sistem tumbuhan dan herbivora berdasarkan parameter demografi dari populasi tumbuhan dan herbivora, serat waktu, jenis dan tingkat kepadatan dependen. Diasumsikan tanpa adanya herbivora, populasi tumbuhan akan berbentuk seperti fungsi logistik. Kemudian, setiap individu dengan spesies yang sama akan bersaing untuk memerebutkan
makanan dan ruang. Jumlah biomassa tumbuhan yang dirusak oleh herbivora mengikuti Holling tipe III.
Pada karya ilmiah ini akan dibahas tentang kestabilan, bifurkasi, dan perilaku model tumbuhan dan herbivora berdasarkan beberapa kasus yang diperoleh. Pertama melakukan penentuan titik tetap tetap, menetukan matriks Jacobi untuk dilakukan pelinieran, dan menentukan nilai eigen untuk menganalisis kestabilan titik tetap. Kemudian menunjukkan jenis bifurkasi yang terjadi, mengkaji limit cycle yang muncul dari bifurkasi Hopf, serta membahas perilaku dinamis yang diperoleh dari beberapa kasus.
Tujuan
1 Menganalisis kestabilan titik tetap pada model interaksi tumbuhan dan herbivora.
2 Menunjukkan jenis bifurkasi pada model interaksi tumbuhan dan herbivora. 3 Mengkaji perilaku dinamik pada model interaksi tumbuhan dan herbivora. 4 Mengkaji limit cycle yg muncul dari bifurkasi Hopf pada model interaksi
tumbuhan dan herbivora.
LANDASAN TEORI
Misalkan diberi sistem persamaan diferensial taklinear sebagai berikut:
𝑥̇ = 𝑓(𝑥). (1)
Persamaan (1) disebut sistem dimensi satu atau sistem orde satu dengan 𝑥(𝑡) adalah nilai real fungsi dari waktu 𝑡 dan 𝑓(𝑥) adalah nilai real fungsi dari 𝑥. Persamaan (1) memunyai titik tetap 𝑥 = 𝑥∗ jika memenuhi 𝑓(𝑥∗) = 0. Titik tetap disebut juga titik kritis atau titik kesetimbangan (Tu 1994).
Untuk suatu sistem persamaan diferensial taklinear, analisis kestabilannya dilakukan melalui pelinearan. Misalkan dilakukan pelinearan terhadap persamaan (1). Dengan menggunakan ekspansi Taylor di sekitar titik tetapnya diperoleh:
𝑥̇ = 𝐴𝑥 + 𝜑(𝑥). (2)
Persamaan (2) merupakan sistem persamaan diferensial taklinear dengan 𝐴
matriks Jacobi, 𝐴 = [ 𝜕𝑓1 𝜕𝑥1 ⋯ 𝜕𝑓1 𝜕𝑥𝑛 ⋮ ⋱ ⋮ 𝜕𝑓𝑛 𝜕𝑥1 ⋯ 𝜕𝑓𝑛 𝜕𝑥𝑛] ,
dan 𝜑(𝑥) suku berorde tinggi yang bersifat lim
𝑛→∞𝜑(𝑥) = 0. Menurut Tu (1994), 𝐴𝑥 pada persamaan (2) disebut pelinearan dari sistem taklinear persamaan (2) yang dituliskan dalam bentuk
Jika 𝐴 matriks berukuran 𝑛 × 𝑛, maka suatu vektor tak nol di 𝑅𝑛 disebut vektor eigen dari A jika untuk suatu skalar 𝜆 yang disebut nilai eigen dari 𝐴 berlaku
𝐴𝑥 = 𝜆𝑥. (3)
Vektor 𝑥 disebut vektor eigen yang bersesuaian dengan nilai eigen 𝜆. Untuk mencari nilai eigen dari matriksyang berukuran 𝑛 × 𝑛 maka persamaan (3) dapat dituliskan kembali sebagai berikut:
(𝐴 − 𝜆𝐼) 𝑥 = 0, (4)
dengan 𝐼 adalah matriks identitas. Persamaan (4) memunyai solusi tak nol jika dan hanya jika
det (𝐴 − 𝜆Ι) = |𝐴 − 𝜆𝐼| = 0. (5)
Persamaan (5) disebut persamaan karakteristik dari matriks 𝐴 (Anton dan Rorres 2004).
Misalkan
𝐴 = (𝑎 𝑏
𝑐 𝑑).
Dari persamaan (5), maka persamaan karakteristiknya menjadi
|𝑎 − 𝜆 𝑏
𝑐 𝑑 − 𝜆| = 0,
sedemikian sehingga diperoleh persamaan
𝜆2− 𝜏𝜆 + Δ = 0,
dengan
𝜏 = trace (𝐴) = 𝑎 + 𝑑 = 𝜆1+ 𝜆2 dan Δ= det (𝐴) = 𝑎𝑑 − 𝑏𝑐 =
𝜆1𝜆2.
Dengan demikian diperoleh nilai eigen dari matriks 𝐴 sebagai berikut:
𝜆1,2 =
𝜏 ± √𝜏2− 4Δ
2 .
Menurut Strogatz (1994), untuk menentukan kestabilan dari suatu sistem dapat dilihat dari nilai Δ . Ada tiga kasus untuk nilai Δ, yaitu:
Δ < 0.
Jika kedua nilai eigen berbeda tanda maka titik tetap bersifat sadel. Δ > 0.
𝜏2− 4Δ > 0.
Jika 𝜏 > 0 dan kedua nilai eigen real bernilai positif, maka titik tetap bersifat simpul tak stabil.
Jika 𝜏 < 0 dan kedua nilai eigen real bernilai negatif, maka titik tetap bersifat simpul stabil.
𝜏2− 4Δ < 0.
Jika 𝜏 > 0 dan kedua nilai eigen imajiner (𝛼 ± 𝑖𝛽), maka titik tetap bersifat spiral tak stabil.
Jika 𝜏 < 0 dan kedua nilai eigen imajiner (𝛼 ± 𝑖𝛽), maka titik tetap bersifat spiral stabil.
Jika 𝜏 = 0 dan kedua nilai eigen imajiner (𝛼 ± 𝑖𝛽), maka titik tetap bersifat center.
𝜏2− 4Δ = 0.
Parabola 𝜏2− 4Δ = 0 adalah garis batas antara simpul dan spiral.
Star nodes atau degenerate terletak pada parabola ini. Jika kedua nilai eigen bernilai sama mama titik tetap bersifat simpul sejati. Δ = 0.
Jika salah satu nilai eigen bernilai nol, maka titik asal bersifat titik tetap tak terisolasi.
Penondimensionalan adalah suatu metode untuk menyederhanakan suatu persamaan banyak parameter menjadi persamaan dengan sedikit parameter. Biasanya penondimensionalan mengelompokkan beberapa parameter dengan sebuah parameter tunggal (Strogatz 1994).
Contoh:
diberikan model mangsa pemangsa sebagai berikut:
𝑑𝑋
𝑑𝑡 = 𝑋̇ = 𝑎𝑋 − 𝑏𝑋𝑌,
(6)
𝑑𝑌
𝑑𝑡 = 𝑌̇ = −𝑐𝑌 + 𝑑𝑋𝑌.
Sistem persamaan (6) memiliki empat parameter, yaitu 𝑎, 𝑏, 𝑐, dan 𝑑. Dengan memisalkan 𝑥 =𝑑 𝑎𝑋, 𝑦 = 𝑏 𝑎𝑌, 𝑎 = 𝑑 𝑎𝑋, maka diperoleh model dengan satu parameter 𝑎, yaitu:
𝑥̇ = 𝑥 − 𝑥𝑦, 𝑦̇ = −𝛼𝑦 + 𝑥𝑦.
Selanjutnya, Strogatz (1994) menjelaskan bahwa struktur kualitatif dari suatu sistem dinamika dapat berubah karena adanya perubahan dari parameter sistem dinamika tersebut. Hal inilah yang disebut bifurkasi. Bifurkasi adalah suatu kondisi terjadinya perubahan jumlah atau kestabilan titik tetap pada sistem dinamik. Titik yang mengalami kondisi ini disebut titik bifurkasi. Pada bifurkasi satu-dimensi ditemukan kasus-kasus untuk bifurkasi saddle-node, bifurkasi transcritical, dan bifurkasi pitchfork (supercritical dan subcritical). Sedangkan pada kasus dua-dimensi ditemukan kasus bifurkasi Hopf.
Bifurkasi saddle-node adalah bifurkasi yang terjadi jika salah satu dari nilai parameter tidak terdapat titik tetap dan pada sisi lain terdapat dua titik tetap, dimana yang satu stabil dan yang lainnya tidak stabil.
Bifurkasi Hopf adalah kemunculan siklus batas (limit cycle) dari kesetimbangan saat sistem mengalami perubahan stabilitas yang melalui sepasang nilai eigen imajiner murni. Limit cycle adalah orbit tertutup yang terisolasi. Terisolasi artinya orbit di sekelilingnya menuju atau menjauhi siklus batas.
Bifurkasi dapat bersifat superkritis atau subkritis yang mengakibatkan limit cycle
menjadi stabil atau tidak stabil. Misalkan:
𝑥̇ = 𝑓(𝑥, 𝑎), 𝑥 𝜖 R𝑛, (7)
adalah sistem persamaan diferensial mandiri orde-2 yang bergantung pada parameter a ∈ R. Diasumsikan bahwa matriks Jacobi 𝐴(𝑎) = 𝑓𝑥(𝑥0(𝑎), 𝑎) memiliki sepasang nilai eigen kompleks
𝜆1,2(𝑎) = 𝜇(𝑎) ± 𝑖𝜔(𝑎), (8)
yang menjadi imajiner murni saat 𝑎 = 0, yaitu 𝜇(0) = 0 dan 𝜔(0) = 𝜔0 > 0. Kemudian, ketika 𝑎 melewati 𝑎 = 0 stabilitas kesetimbangan berubah.
PEMODELAN
Model yang akan dianalisis adalah model interaksi tumbuhan dan herbivora yang mana dinamika perilakunya analogi dengan model mangsa-pemangsa. Pada model diasumsikan bahwa tidak adanya herbivora, populasi tumbuhan tumbuh sesuai dengan hukum logistik pertumbuhan dengan daya dukung lingkungan 𝐾 dan tingkat kelahiran intrinsik 𝑟. Daya dukung lingkungan 𝐾 dan tingkat kelahiran interinsik 𝑟 diasumsikan konstan dan positif. Asumsi-asumsi tersebut merupakan asumsi standar yang digunakan untuk sebuah kompetisi makanan dan ruang antar individu dari spesies yang sama serta pada kepadatan yang tinggi kematian meningkat karena peluang frekuensi pertemuan antarindividu tinggi pada setiap epidemi. Jumlah biomasa tumbuhan yang dihancurkan oleh herbivora diasumsikan mengikuti respon fungsional Holling jenis-III sebagai interaksi antara tumbuhan dan herbivora. Respon fungsional adalah tingkat yang mana setiap herbivora menangkap biomasa tumbuhan. Herbivora menghasilkan 𝑒 keturunan untuk setiap kematian biomasa tumbuhan dan tingkat kepadatan kematian independen 𝑚. Model dua dimensi tumbuhan dan herbivora diatur oleh persamaan sebagai berikut:
𝑑𝑁 𝑑𝑡 = 𝑟𝑁 (1 − 𝑁 𝐾) − 𝑎𝑁2𝑃 𝑏 + 𝑁2, (9) 𝑑𝑃 𝑑𝑡 = 𝑒𝑎𝑁2𝑃 𝑏 + 𝑁2− 𝑚𝑃, dengan
𝑁(𝑡) Banyaknya populasi tumbuhan pada waktu 𝑡.
𝑃(𝑡) Banyaknya populasi herbivora pada waktu 𝑡.
𝐾 Daya dukung lingkungan.
𝑟 Laju pertumbuhan intrinsik.
𝑎 Tingkat serapan maksimun herbivora.
𝑏 Tingkat kejenuhan kepadatan tumbuhan.
𝑚 Tingkat kematian independen.
Semua parameter 𝑟, 𝐾, 𝑎, 𝑏, 𝑒, dan 𝑚 yang terlibat dalam sistem model diasumsikan positif dan faktor konversi 𝑒 diasumsikan memenuhi kondisi 0 < 𝑒 < 1. Sistem model tumbuhan dan herbivora mengandung banyak parameter. Oleh karena itu untuk meminimumkan parameter maka sistem model ditransformasikan ke bentuk yang lebih sederhana dengan penondimensionalan model. Pada persamaan (9) didefinisikan 𝑁 = √𝑏𝑥, 𝑃 = √𝑏𝑦, 𝑡 = 𝐾𝜏 𝑟√𝑏, 𝛼 = 𝐾 √𝑏, 𝛽 = 𝑎𝐾 √𝑏𝑟, 𝛽1 = 𝑒𝛽, dan 𝛾 = 𝑚𝐾 √𝑏𝑟, sehingga diperoleh: 𝑥̇ =𝑑𝑥 𝑑𝜏 = 𝑥(𝛼 − 𝑥) − 𝛽𝑥2𝑦 1 + 𝑥2, (10) 𝑦̇ =𝑑𝑦 𝑑𝜏 = 𝛽1𝑥2𝑦 1 + 𝑥2− 𝛾𝑦,
(Bukti sistem persamaan (10) dapat dilihat pada Lampiran 1)
PEMBAHASAN
Penentuan Titik Tetap Model
Titik tetap dari persamaan (10) akan diperoleh dengan menetapkan 𝑥̇ = 0,
𝑦̇ = 0 sehingga diperoleh tiga titik tetap, yaitu 𝑇1(0,0), 𝑇2(𝛼, 0), dan 𝑇3(𝑥∗, 𝑦∗) dengan 𝑥∗ = √ 𝛾 𝛽1− 𝛾 , 𝑦∗ =(𝛼 − 𝑥∗)(1 + 𝑥∗ 2) 𝛽𝑥∗ .
(Bukti dapat dilihat lihat pada lampiran 2) Karena titik tetap positif, akibatnya kondisi 0 < 𝑥∗ < 𝛼.
Analisis Kestabilan Titik Tetap Model
Analisis kestabilan titik tetap diperoleh dengan melakukan pelinearan pada persamaan (10). Dengan melakukan pelinearan pada persamaan tersebut maka akan diperoleh matriks Jacobi sebagai berikut:
𝐽 = ( 𝛼 − 2𝑥 − 2𝛽𝑥𝑦 (1 + 𝑥2)2 𝛽𝑥2 1 + 𝑥2 2𝛽1𝑥𝑦 (1 + 𝑥2)2 𝛽1𝑥2 1 + 𝑥2 − 𝛾 ) .
(Bukti dapat dilihat pada lampiran 3) Kestabilan titik tetap dapat dilihat dari nilai eigen yang dihasilkan oleh matriks Jacobi persamaan (10) yang dievaluasi pada titik tetap tersebut. Selanjutnya, kestabilan di sekitar titik tetap diperiksa.
Titik tetap 𝑇1(0,0) disubstitusikan ke matriks Jacobi sehingga diperoleh:
𝐽(0,0)= (𝛼 0
0 −𝛾).
Nilai eigen akan diperoleh dengan menyelesaikan persamaan karakteristik
det(𝐽(0,0)− 𝜆𝐼) = 0, sehingga akan diperoleh nilai eigen untuk matriks 𝐽(0,0), yaitu:
𝜆1 = 𝛼, 𝜆2 = −𝛾.
Karena parameter diasumsikan positif, maka 𝜆1 > 0 dan 𝜆2 < 0. Kedua nilai eigen real dan berbeda tanda sehingga kestabilan titik tetapnya bersifat sadel.
Titik tetap 𝑇2(𝛼, 0)disubstitusikan ke matriks Jacobi sehingga diperoleh:
𝐽(𝛼,0)= ( −𝛼 𝛽𝛼 2 1 + 𝛼2 0 𝛽1𝛼 2 1 + 𝛼2− 𝛾) .
Nilai eigen akan diperoleh dengan menyelesaikan persamaan karakteristik
det(𝐽(𝛼,0)− 𝜆𝐼) = 0, sehingga akan diperoleh nilai eigen matriks 𝐽(𝛼,0), yaitu:
𝜆1 = −𝛼 < 0 𝜆2 = 𝛽1𝛼
2
1 + 𝛼2− 𝛾.
(Bukti dapat dilihat pada lampiran 3) Kondisi 𝑥∗ < 𝛼 dan 𝛽1 > 𝛾 menyebabkan 𝛽1𝛼2 > 𝛾(1 + 𝛼2) sebagai syarat parameter dalam sistem model. Oleh karena itu 𝜆2 > 0 sehingga kestabilan titik tetapnya bersifat sadel.
Titik tetap 𝑇3(𝑥∗, 𝑦∗) disubstitusikan ke matriks Jacobi sehingga diperoleh:
𝐽 = ( 𝛼 − 2𝑥∗− 2𝛽𝑥∗𝑦∗ (1 + 𝑥∗2)2 − 𝛽𝑥∗ 2 1 + 𝑥∗2 2𝛽1𝑥∗𝑦∗ (1 + 𝑥∗2)2 𝛽1𝑥∗2 1 + 𝑥∗2 − 𝛾 ) .
Nilai eigen akan diperoleh dengan menyelesaikan persamaan karakteristik
det(𝐽(𝑥∗,𝑦∗)− 𝜆𝐼) = 0, sehingga akan diperoleh nilai eigen untuk matriks 𝐽(𝑥∗,𝑦∗),
𝜆1= −𝐴1 + √𝐴1 2 − 4𝐴 2 2 , 𝜆2 =−𝐴1− √𝐴1 2− 4𝐴 2 2 , dengan 𝐴1 = 𝑡𝑟𝑎𝑐𝑒(𝐽) = − (𝛼 − 2𝑥∗− 2𝛽𝑥∗𝑦∗ (1 + 𝑥∗2)2), 𝐴2 = 𝑑𝑒𝑡(𝐽) = 2𝛽𝛽1𝑥∗3𝑦∗ (1 + 𝑥∗2)3 ,
(Bukti dapat dilihat pada lampiran 3) kemudian untuk penyederhanaan, kita simbolkan
𝐵 = 𝐴12− 4𝐴2 dan 𝐶 = √𝐴12− 4𝐴2.
Berdasarkan kondisi yang telah diperoleh maka sesuai dengan analisis kestabilan, kestabilan titik tetap yang diperoleh dipengaruhi oleh nilai parameter-parameter yang dipilih, yaitu parameter 𝛼, 𝛽, 𝛽1, dan 𝛾 sehingga harus diperiksa dari kondisi
𝐴1, 𝐴2 dan 𝐵.
Oleh karena 𝛽1 > 𝛾 maka kondisi dari 𝐴2 positif (𝐴2 > 0), sedangkan kondisi dari 𝐴1 bisa 𝐴1 < 0 atau 𝐴1 > 0 dan kondisi dari 𝐵 bisa 𝐵 < 0 atau 𝐵 > 0. Kondisi 𝐴1 > 0 dapat diturunkan menjadi 𝛼 <
2𝑥∗𝛾
2𝛾−𝛽1 (Bukti dapat dlihat pada
lampiran 4), sedangkan kondisi 𝐴1 < 0 dapat diturunkan menjadi 𝛼 > 2𝑥∗𝛾
2𝛾−𝛽1 (Bukti
dapat dilihat pada lampiran 4). Dari sini terdapat empat kasus, yaitu: 1. 𝐵 < 0, 𝛼 < 2𝑥∗𝛾 2𝛾−𝛽1, dan 𝛽1 > 𝛾. 2. 𝐵 < 0, 𝛼 > 2𝑥∗𝛾 2𝛾−𝛽1, dan 𝛽1 > 𝛾. 3. 𝐵 > 0, 𝛼 < 2𝑥∗𝛾 2𝛾−𝛽1, dan 𝛽1 > 𝛾. 4. 𝐵 > 0, 𝛼 > 2𝑥∗𝛾 2𝛾−𝛽1, dan 𝛽1 > 𝛾.
Untuk kasus pertama akan menghasilkan kedua nilai eigen imajiner (𝜆1,2 =
−𝐴±𝑖𝐶
2 ), sehingga dari nilai-nilai eigen yang diperoleh, kestabilan titik tetapnya bersifat spiral stabil. Untuk kasus kedua akan menghasilkan kedua nilai eigen imajiner (𝜆1,2 =𝐴±𝑖𝐶
2 ), sehingga dari nilai-nilai eigen yang diperoleh, kestabilan titik tetapnya bersifat spiral tak stabil. Untuk kasus ketiga akan menghasilkan kedua nilai eigen real bernilai negatif (𝜆1,2 =
−𝐴±𝐶
2 ), sehingga dari nilai-nilai eigen yang diperoleh, kestabilan titik tetapnya bersifat simpul stabil. Sedangkan untuk kasus keempat akan menghasilkan kedua nilai eigen real bernilai positif (𝜆1,2 =𝐴±𝐶
2 ), sehingga dari nilai-nilai eigen yang diperoleh, kestabilan titik tetapnya bersifat simpul tak stabil. Berikut adalah tabel kondisi kestabilan yang diperoleh
Tabel Kondisi kestabilan titik tetap 𝑇3 Kasus Kondisi 𝑻𝟑 1 𝐵 < 0 𝛼 < 2𝑥∗𝛾 2𝛾 − 𝛽1 𝛽1 > 𝛾 Spiral stabil 2 𝐵 < 0 𝛼 > 2𝑥∗𝛾 2𝛾 − 𝛽1 𝛽1 > 𝛾 Spiral tak stabil 3 𝐵 > 0 𝛼 < 2𝑥∗𝛾 2𝛾 − 𝛽1 𝛽1 > 𝛾 Simpul stabil 4 𝐵 > 0 𝛼 > 2𝑥∗𝛾 2𝛾 − 𝛽1 𝛽1 > 𝛾 Simpul tak stabil Dari Tabel 1 dapat dilihat bahwa setiap kasus mempunyai titik tetap dengan jenis kestabilan ada yang stabil dan ada yang tidak stabil. Pada saat penondimensionalan 𝛼 = 𝐾
√𝑏 yang mana artinya bahwa nilai parameter 𝛼 berbanding terbalik dengan tingkat kejenuhan kepadatan tumbuhan (𝑏), 𝛾 = 𝑚𝐾
√𝑏𝑟 yang mana artinya bahwa nilai parameter 𝛾 berbanding lurus dengan tingkat kematian independen herbivora (𝑚), dan 𝛽 = 𝑎𝐾
√𝑏𝑟 artinya bahwa nilai parameter 𝛽 berbanding lurus dengan tingkat serapan maksimum herbivora yang mana berbanding lurus juga dengan parameter 𝛽1 karena 𝛽1 = 𝑒𝛽. Diketahui 𝛼 > 2𝑥∗𝛾
2𝛾−𝛽1,
artinya kondisi tersebut dihadapkan pada saat tingkat kejenuhan kepadatan tumbuhan rendah. Sedangkan 𝛼 < 2𝑥∗𝛾
2𝛾−𝛽1, artinya kondisi tersebut dihadapkan pada
saat tingkat kejenuhan kepadatan tumbuhan tinggi.
Bifurkasi Hopf
Diketahui nilai eigen titik tetap 𝑇3(𝑥∗, 𝑦∗) dari persamaan 2, yaitu:
𝜆1,2 =−𝐴1± √𝐴1
2− 4𝐴
2
2 .
Pada kondisi 𝐴1 > 0 dan 𝐵 = 𝐴12 − 4𝐴2 < 0 kestabilan 𝑇3(𝑥∗, 𝑦∗) adalah spiral stabil, sedangkan pada kondisi 𝐴1 < 0 dan 𝐵 = 𝐴12− 4𝐴2 < 0 kestabilan
𝑇3(𝑥∗, 𝑦∗) spiral tak stabil.
Fenomena perubahan kestabilan terjadi ketika melewati 𝐴1 = 0. Pada kondisi
𝐴1 = 0 dihasilkan sepasang nilai eigen yang bernilai imajiner murni. Dalam kasus ini fenomena perubahan kestabilan tersebut dikenal sebagai bifurkasi Hopf.
Bifurkasi Hopf terjadi ketika berubahnya kestabilan dari spiral stabil menjadi spiral tak stabil dan terdapat limit cycle di dalamnya yang mana fenomena ini terjadi pada kasus dua. Ilustrasi perubahan kestabilan 𝑇3(𝑥∗, 𝑦∗) dijelaskan pada bagian selanjutnya.
SIMULASI
Dinamika Populasi tumbuhan dan herbivora dapat ditunjukkan melalui kurva yang menggambarkan populasi populasi tumbuhan dan herbivora pada kurun waktu tertentu. Selanjutnya dilakukan simulasi numerik melalui proses komputasi. Pada proses komputasi, masing-masing variabel dan parameter membutuhkan suatu nilai awal.
Pada saat penondimensionalan model, diketahui bahwa parameter-parameter
𝛼 = 𝐾
√𝑏 , 𝛽 = 𝑎𝐾
√𝑏𝑟 , 𝛽1 = 𝑒𝛽 , dan 𝛾 = 𝑚𝐾
√𝑏𝑟 sangat berpengaruh untuk melihat dinamika populasi tumbuhan dan herbivora. Tidak sembarangan dalam menetukan nilai awal parameter. Nilai awal yang ditentukan harus memenuhi kondisi-kondisi setelah dilakukan proses analisis model. Berikut kondisi umum parameter yang harus dipenuhi: 0 ≤ 𝑥 ≤ 𝛼 dan 2𝛾 > 𝛽1 yang mana nilai parameter-parameter tersebut diasumsikan positif. Berdasarkan dari kasus-kasus yang diperoleh, pada proses simulasi akan diperlihatkan pengaruh dari tingkat kejenuhan kepadatan tumbuhan (𝛼), tingkat kematian independen (𝛾), dan tingkat serapan maksimum herbivora (𝛽1) terhadap dinamika populasi tumbuhan dan herbivora.
Dinamika Populasi Tumbuhan dan Herbivora Kasus 1 Pada kasus pertama, kondisi 𝐵 < 0, 𝛼 < 2𝑥∗𝛾
2𝛾−𝛽1, dan 𝛽1 > 𝛾. Nilai parameter
yang dipilih adalah 𝛽 = 1, 𝛽1 = 0.5, 𝛾 = 0.4, dan 𝛼 = 5, serta nilai awal 𝑥(0) = 2 dan 𝑦(0) = 7.5. Pada kasus pertama dihadapkan pada kondisi dengan tingkat kejenuhan kepadatan tumbuhan tinggi (𝛼 < 2𝑥∗𝛾
2𝛾−𝛽1) dan pada kondisi dengan
tingkat serapan maksimum herbivora lebih tinggi daripada tingkat kematian independen (𝛽1 > 𝛾). Titik tetap, nilai eigen, dan jenis kestabilan pada kasus pertama disajikan dalam tabel sebagai berikut.
Tabel 1 Titik tetap, nilai eigen, dan kestabilan
Titik Tetap 𝝀𝟏 𝝀𝟐 Kestabilan
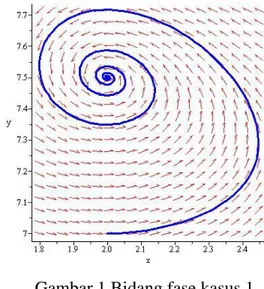
𝑇3(2,7.5) 𝜆1 = −0.1 + 0.6856𝑖 𝜆1 = −0.1 − 0.6856𝑖 Spiral stabil Pada tabel 2 titik tetap yang diperoleh 𝑇3(2,7.5) dengan nilai eigen 𝜆1 = −0.1 + 0.685565𝑖 dan 𝜆2 = −0.1 − 0.685565𝑖 sehingga kestabilannya bersifat spiral stabil (Gambar 1).
Gambar 1 Bidang fase kasus 1
Pada Gambar 1 diberikan ilustrasi bidang fase di sekitar titik tetap dengan jenis kestabilan spiral stabil. Di awal waktu, populasi tumbuhan dan herbivora sama-sama mengalami pertumbuhan dengan perkembangan yang sangat pesat terjadi pada tumbuhan. Pertumbuhan populasi tumbuhan yang sangat pesat menyebabkan suplai makanan yang tersedia buat herbivora melimpah sehingga pertumbuhan populasi herbivora juga berkembang pesat. Namun seiring berjalannya waktu populasi tumbuhan berkurang. Kompetisi antar herbivora juga terjadi ketika populasi tumbuhan semakin berkurang sehingga populasi herbivora juga semakin berkurang sampai pada akhirnya kedua populasi mengalami osilasi dan mencapai kestabilan.
Dinamika Populasi Tumbuhan dan Herbivora Kasus 2 Pada kasus kedua, kondisi 𝐵 < 0, 𝛼 > 2𝑥∗𝛾
2𝛾−𝛽1, dan 𝛽1 > 𝛾. Nilai parameter
yang dipilih adalah 𝛽 = 1, 𝛽1 = 0.5, 𝛾 = 0.4, dan 𝛼 = 6, serta nilai awal 𝑥(0) = 2 dan 𝑦(0) = 8.5. Pada kasus kedua dihadapkan pada kondisi dengan tingkat kejenuhan kepadatan tumbuhan rendah (𝛼 > 2𝑥∗𝛾
2𝛾−𝛽1) dan pada kondisi dengan
tingkat serapan maksimum herbivora lebih tinggi daripada tingkat kematian independen (𝛽1 > 𝛾). Titik tetap, nilai eigen, dan jenis kestabilan pada kasus kedua disajikan dalam tabel sebagai berikut.
Tabel 2 Titik tetap, nilai eigen, dan kestabilan
Titik Tetap 𝝀𝟏 𝝀𝟐 Kestabilan
𝑇3(2,10) 𝜆1 = 0.4 + 0.69282𝑖 𝜆1 = 0.4 − 0.69282𝑖 Spiral tak stabil Pada Tabel 3 titik tetap yang diperoleh 𝑇3(2,10) dengan nilai eigen 𝜆1 = 0.4 +
0.69282𝑖 dan 𝜆2 = 0.4 − 0.69282𝑖 sehingga kestabilannya bersifat spiral tak stabil (Gambar 2).
Gambar 2 Bidang fase kasus 2
Pada Gambar 2 diberikan ilustrasi bidang fase di sekitar titik tetap dengan jenis kestabilan spiral tak stabil. Pada ilustrasi titik tetap 𝑇3(2,10) muncul limit cycle. Diilustrasikan orbit bergerak berlawanan dengan arah jarum jam. Orbit masuk ke dalam titik sampai ada batas yang berbentuk siklus yang dikenal sebagai siklus limit atau limit cycle. Dengan ini fenomena yang terjadi pada kasus kedua, yaitu perubahan kestabilan titik tetap dan keberadaan limit cycle karena berubahnya nilai parameter sistem yang merupakan sifat bifurkasi Hopf. Keberadaan limit cycle
diperkuat oleh Gambar 3 yang merupakan kebalikan penggambaran dari Gambar 2. Pada gambar 3 orbit bergerak keluar dari titik tetap dengan arah yang sama sehingga orbit akan terus bergerak dan bertemu hingga ada batas yang berbentuk siklus yang dikenal sebagai limit cycle.
Gambar 3 Bidang fase kasus 2 dengan arah orbit dari dalam ke luar
Di awal waktu, populasi tumbuhan dan herbivora sama-sama mengalami pertumbuhan. Seperti yang terjadi pada Gambar 1, pertumbuhan populasi yang berkembang pesat di awal waktu terjadi pada populasi tumbuhan. Kompetisi antar
tumbuhan dan antar herbivora juga terjadi sehingga seiring berjalannya waktu, pertumbuhan kedua populasi berfluktuasi dengan jenis kestabilan spiral tak stabil.
Dinamika Populasi Tumbuhan dan Herbivora Kasus 3 Pada kasus ketiga, kondisi 𝐵 > 0, 𝛼 < 2𝑥∗𝛾
2𝛾−𝛽1, dan 𝛽1 > 𝛾. Nilai parameter
yang dipilih adalah 𝛽 = 1, 𝛽1 = 0.5, 𝛾 = 0.4, dan 𝛼 = 2.5, serta nilai awal
𝑥(0) = 1 dan 𝑦(0) = 1. Pada kasus ketiga dihadapkan pada kondisi dengan tingkat kejenuhan kepadatan tumbuhan yang lebih tinggi (𝛼 < 2𝑥∗𝛾
2𝛾−𝛽1) dan pada kondisi
dengan tingkat serapan maksimum herbivora lebih tinggi daripada tingkat kematian independen (𝛽1 > 𝛾). Titik tetap, nilai eigen, dan jenis kestabilan pada kasus ketiga disajikan dalam tabel sebagai berikut.
Tabel 3 Titik tetap, nilai eigen, dan kestabilan
Titik Tetap 𝝀𝟏 𝝀𝟐 Kestabilan
𝑇3(2,1.25) 𝜆1 = −0.282109 𝜆1 = −1.41789 Simpul stabil
Pada Tabel 4 titik tetap yang diperoleh adalah 𝑇3(2,1.25) dengan nilai eigen 𝜆1 = 1.495 dan 𝜆2 = 0.205 sehingga kestabilannya bersifat simpul stabil (Gambar 4).
Gambar 4 Bidang fase kasus 3
Pada Gambar 4 diberikan ilustrasi bidang fase di sekitar titik tetap dengan jenis kestabilan simpul stabil. Di awal waktu, populasi tumbuhan mengalami perkembangan yang sangat pesat, sedangkan populasi herbivora mengalami penurunan. Penurunan populasi herbivora karena di awal waktu suplai makanan belum melimpah dan terjadi kompetisi antar herbivora dalam memperebutkan makanan. Namun ketika suplai makanan buat herbivora melimpah, populasinya mulai berkembang dan ketika populasi herbivora mulai berkembang, populasi tumbuhan mulai menyusut sampai pada akhirnya kedua populasi mencapai kestabilan. Berbeda dengan kondisi-kondisi sebelumnya, dalam jangka panjang pada kondisi ini, populasi tumbuhan lebih banyak dari populasi herbivora.
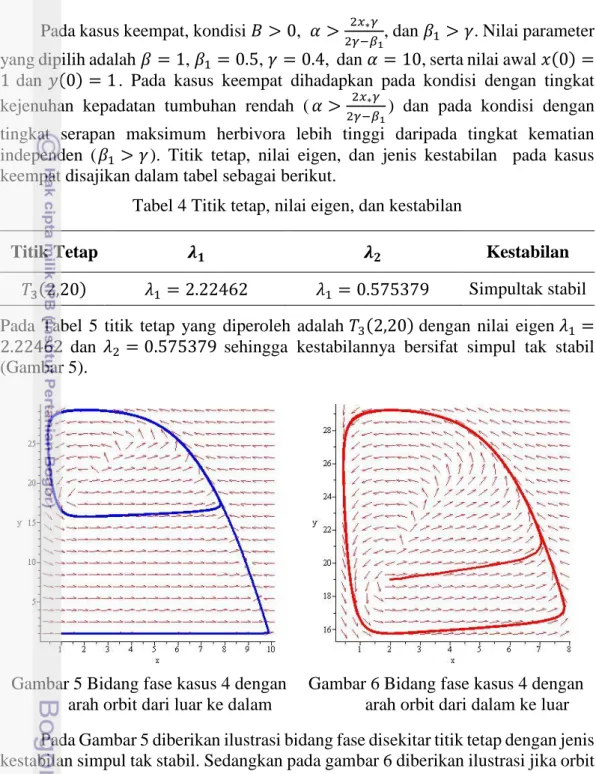
Dinamika Populasi Tumbuhan dan Herbivora Kasus 4 Pada kasus keempat, kondisi 𝐵 > 0, 𝛼 > 2𝑥∗𝛾
2𝛾−𝛽1, dan 𝛽1 > 𝛾. Nilai parameter
yang dipilih adalah 𝛽 = 1, 𝛽1 = 0.5, 𝛾 = 0.4, dan 𝛼 = 10, serta nilai awal 𝑥(0) =
1 dan 𝑦(0) = 1. Pada kasus keempat dihadapkan pada kondisi dengan tingkat kejenuhan kepadatan tumbuhan rendah (𝛼 > 2𝑥∗𝛾
2𝛾−𝛽1) dan pada kondisi dengan
tingkat serapan maksimum herbivora lebih tinggi daripada tingkat kematian independen (𝛽1 > 𝛾). Titik tetap, nilai eigen, dan jenis kestabilan pada kasus keempat disajikan dalam tabel sebagai berikut.
Tabel 4 Titik tetap, nilai eigen, dan kestabilan
Titik Tetap 𝝀𝟏 𝝀𝟐 Kestabilan
𝑇3(2,20) 𝜆1 = 2.22462 𝜆1 = 0.575379 Simpultak stabil
Pada Tabel 5 titik tetap yang diperoleh adalah 𝑇3(2,20) dengan nilai eigen 𝜆1 = 2.22462 dan 𝜆2 = 0.575379 sehingga kestabilannya bersifat simpul tak stabil (Gambar 5).
Gambar 5 Bidang fase kasus 4 dengan arah orbit dari luar ke dalam
Gambar 6 Bidang fase kasus 4 dengan arah orbit dari dalam ke luar Pada Gambar 5 diberikan ilustrasi bidang fase disekitar titik tetap dengan jenis kestabilan simpul tak stabil. Sedangkan pada gambar 6 diberikan ilustrasi jika orbit bergerak dari dalam ke luar. Di awal waktu, populasi tumbuhan mengalami perkembangan yang sangat pesat sehingga suplai makanan yang tersedia melimpah. Akibatnya populasi herbivora semakin bertambah. Suplai makanan yang terus dimakan oleh tumbuhan menyebabkan populasi tumbuhan semakin menyusut sampai pada akhirnya populasi herbivora lebih banyak dibandingkan dengan populasi tumbuhan. Kedua populasi dalam jangka panjang befluktuasi dan jenis kestabilannya adalah simpul tak stabil.
SIMPULAN
Pada model yang dibahas, diperoleh tiga titik tetap. Dari ketiga titik tetap, kestabilan titik tetap pertama dan kedua selalu sadel, sedangkan kestabilan titik tetap ketiga berbeda-beda bergantung nilai parameter yang diberikan. Dengan pemilihan nilai parameter tertentu, diperoleh bifurkasi Hopf yang memunculkan fenomena limit cycle. Hal ini terjadi pada saat perubahan kestabilan titik tetap ketiga dari spiral stabil berubah menjadi spiral tak stabil.
Dinamika populasi dipengaruhi oleh tingkat kejenuhan kepadatan tumbuhan, tingkat serapan maksimum herbivora, dan tingkat kematian independen. Pada kondisi dengan tingkat kejenuhan kepadatan tumbuhan tinggi dan tingkat serapan maksimum herbivora lebih tinggi daripada tingkat kematian independen, populasi tumbuhan dan herbivora stabil. Pada kondisi dengan tingkat kejenuhan kepadatan tumbuhan rendah dan tingkat serapan maksimum herbivora lebih tinggi daripada tingkat kematian independen, populasi tumbuhan tidak stabil. Dalam jangka panjang, populasi herbivora cenderung lebih banyak dibandingkan dengan populasi tumbuhan, namun pada kondisi dengan tingkat kejenuhan tumbuhan yang lebih tinggi, populasi tumbuhan lebih banyak dibandingkan dengan populasi herbivora.
DAFTAR PUSTAKA
Anton H, Rorres C. 2004. Aljabar Linear Elementer. Ed ke-8. Indriasari R, Harmein I, Penerjemah. Jakarta (ID): Erlangga.
Fatik BM. 2010. Textbook of Animal Behaviour. New Delhi:PHI Learning Pvt. Ltd. Saha T dan Bandyopadhyay M. 2005. Dynamical Analysis of A Plant-Herbivore Model: Bifurcation and Global Stability. J. Appl. Math. And Computing 19: 327-344.
Strogatz SH. 1994. Nonlinear Dynamics and Chaos with Application to Physics, Biology, Chemistry, and Engineering. Massachusets (US): Addison-Wesley Publishing Company.
Tu PNV. 1994. Dynamical System An Introduction with Application in Economics and Biology. Heidelberg (DE): Springer-Verlag.
Lampiran 1 Penondimensionalan model
Diberikan model interaksi Tumbuhan dan Herbivora :
𝑑𝑁 𝑑𝑡 = 𝑟𝑁 (1 − 𝑁 𝐾) − 𝑎𝑁2𝑃 𝑏 + 𝑁2, 𝑑𝑃 𝑑𝑡 = 𝑒𝑎𝑁2𝑃 𝑏 + 𝑁2− 𝑚𝑃.
Persamaan di atas ditransformasikan menjadi sistem persamaan yang lebih sederhana dengan melakukan penondimensional sebagai berikut:
𝑁 = √𝑏𝑥, 𝑃 = √𝑏𝑦, 𝑡 = 𝐾𝜏 𝑟√𝑏, 𝑑𝑥(𝜏) 𝑑𝜏 = 𝑑𝑥(𝜏) 𝑑𝑁(𝑡)∙ 𝑑𝑁(𝑡) 𝑑𝑡 ∙ 𝑑𝑡 𝑑𝜏 = 1 √𝑏(𝑟𝑁 (1 − 𝑁 𝐾) − 𝑎𝑁2𝑃 𝑏 + 𝑁2) 𝐾 𝑟√𝑏 = 1 √𝑏(𝑟√𝑏𝑥 (1 − √𝑏𝑥 𝐾 ) − 𝑎𝑏𝑥2√𝑏𝑦 𝑏 + 𝑏𝑥2 ) 𝐾 𝑟√𝑏 = 𝐾 𝑟√𝑏√𝑏(𝑟√𝑏𝑥 − 𝑟𝑏𝑥2 𝐾 − 𝑎𝑏𝑥2√𝑏𝑦 𝑏(1 + 𝑥2)) = 𝛼 𝑟√𝑏(𝑟√𝑏𝑥 − 𝑟𝑏𝑥2 𝐾 − 𝑎𝑥2√𝑏𝑦 1 + 𝑥2 ) = 𝛼 𝑟√𝑏(𝑟√𝑏𝑥 − 𝑟𝑏𝑥2 𝐾 − 𝛽√𝑏𝑟 𝐾 ∙ 𝑥2√𝑏𝑦 1 + 𝑥2) = 𝛼 √𝑏(√𝑏𝑥 − 𝑏𝑥2 𝐾 − √𝑏√𝑏𝛽𝑥2√𝑏𝑦 𝐾(1 + 𝑥2) ) = 𝛼𝑥 −𝛼√𝑏𝑥𝑥 𝐾 − 𝛼√𝑏𝛽𝑥2𝑦 𝐾(1 + 𝑥2) = 𝛼𝑥 −𝛼𝑥 2 𝛼 − 𝛼𝛽𝑥2𝑦 𝛼(1 + 𝑥2) = 𝑥(𝛼 − 𝑥) − 𝛽𝑥 2𝑦 1 + 𝑥2. 𝑑𝑦(𝜏) 𝑑𝜏 = 𝑑𝑦(𝜏) 𝑑𝑃(𝑡)∙ 𝑑𝑃(𝑡) 𝑑𝑡 ∙ 𝑑𝑡 𝑑𝜏 = 1 √𝑏( 𝑒𝑎𝑁2𝑃 𝑏 + 𝑁2− 𝑚𝑃) 𝐾 𝑟√𝑏 = 1 √𝑏( 𝑒𝑎𝑏𝑥2√𝑏𝑦 𝑏 + 𝑏𝑥2 − 𝑚√𝑏𝑦) 𝐾 𝑟√𝑏
= 𝐾 𝑟√𝑏√𝑏( 𝑒𝑎𝑏𝑥2√𝑏𝑦 𝑏(1 + 𝑥2) − 𝑚√𝑏𝑦) = 𝐾 𝑟√𝑏∙ 𝑒𝑎𝑥2𝑦 1 + 𝑥2− 𝐾 𝑟√𝑏∙ 𝑚𝑦 = 𝛽𝑒𝑥 2𝑦 1 + 𝑥2− 𝛾𝑦 = 𝛽1𝑥 2𝑦 1 + 𝑥2− 𝛾𝑦, dengan 𝛼 = 𝐾 √𝑏 , 𝛽 = 𝛼𝐾 √𝑏𝑟, 𝛽1 = 𝑒𝑏, dan 𝛾 = 𝑚𝐾 √𝑏𝑟.
Lampiran 2 Penentuan titik tetap model interaksi tumbuhan dan herbivora Titik tetap akan diperoleh dengan menetapkan persamaan (10) sebagai berikut:
𝑥̇ = 𝑥(𝛼 − 𝑥) − 𝛽𝑥 2𝑦 1 + 𝑥2 = 0, 𝑦̇ = 𝛽1𝑥 2𝑦 1 + 𝑥2− 𝛾𝑦 = 0.
Dari persamaan pertama akan diperoleh nilai 𝑥 sebagai berikut:
𝑥̇ = 0 𝑥(𝛼 − 𝑥) − 𝛽𝑥 2𝑦 1 + 𝑥2 = 0 𝑥(𝛼 − 𝑥) = 𝛽𝑥 2𝑦 1 + 𝑥2 𝑥𝛼 − 𝑥2 = 𝛽𝑥 2𝑦 1 + 𝑥2 𝑥𝛼 − 𝑥2(1 + 𝑥2) = 𝛽𝑥2𝑦 𝑥𝛼 + 𝑥3𝛼 − 𝑥2− 𝑥4 = 𝛽𝑥2𝑦 𝑥(𝛼 + 𝑥2𝛼 − 𝑥 − 𝑥3− 𝛽𝑥𝑦) = 0
dari sini diperoleh:
𝑥 = 0 ∩ 𝛼 + 𝑥2𝛼 − 𝑥 − 𝑥3− 𝛽𝑥𝑦 = 0 𝑥 = 0 ∩ 𝛽𝑥𝑦 = 𝛼 + 𝑥2𝛼 − 𝑥 − 𝑥3 𝑥 = 0 ∩ 𝑦 = 𝛼 + 𝑥 2𝛼 − 𝑥 − 𝑥3 𝛽𝑥 𝑥 = 0 ∩ 𝑦 =(𝛼 − 𝑥)(1 + 𝑥 2) 𝛽𝑥 .
𝑦̇ = 0 𝛽1𝑥 2𝑦 1 + 𝑥2− 𝛾𝑦 = 0 𝛽1𝑥 2𝑦 1 + 𝑥2 = 𝛾𝑦 𝛽1𝑥2𝑦 = 𝛾𝑦 + 𝛾𝑦𝑥2 𝛽1𝑥2𝑦 − 𝛾𝑦 + 𝛾𝑦𝑥2 = 0 𝑦(𝛽1𝑥2− 𝛾 + 𝛾𝑥2) = 0 dari sini diperoleh:
𝑦 = 0 ∩ 𝛽1𝑥2− 𝛾 + 𝛾𝑥2 = 0 𝑦 = 0 ∩𝑥2(𝛽 − 𝛾) = 𝛾 𝑦 = 0 ∩ 𝑥2 = 𝛾 𝛽 − 𝛾 𝑦 = 0 ∩ 𝑥 = √ 𝛾 𝛽 − 𝛾.
Substitusi 𝑦 = 0 untuk mendapatkan nilai 𝑥 ke persamaan 𝑥 = 0 dan 𝑦 =
(𝛼−𝑥)(1+𝑥2) 𝛽𝑥 . 𝑥 = 0, karena 𝑦 = 0 maka 𝑥 = 0 𝑦 =(𝛼−𝑥)(1+𝑥2) 𝛽𝑥 , karena 𝑦 = 0 maka (𝛼 − 𝑥)(1 + 𝑥2) 𝛽𝑥 = 0 (𝛼 − 𝑥)(1 + 𝑥2) = 0 𝑥 − 𝛼 = 0 ∩ 1 + 𝑥2 = 0 𝑥 = 𝛼 ∩ 1 + 𝑥2 = 0, dengan 1 + 𝑥2adalah definit positif.
Sehingga diperoleh titik tetap 𝑇1(𝑥, 𝑦) = (0,0)dan 𝑇2(𝑥, 𝑦) = (𝛼, 0).
Substitusi 𝑥 = √𝛽𝛾
1−𝛾 untuk mendapatkan nilai 𝑦 ke persamaan 𝑦 =
(𝛼−𝑥)(1+𝑥2) 𝛽𝑥 . 𝑦 =(𝛼−𝑥)(1+𝑥2) 𝛽𝑥 , karena 𝑥 = √ 𝛾 𝛽1−𝛾 maka 𝑦∗ = (𝛼−𝑥∗)(1+𝑥∗2) 𝛽𝑥∗ ,
Lampiran 3 Penentuan nilai eigen
Dengan melakukan pelinearan pada persamaan (10) diperleh Matriks Jacobi sebagai berikut:
𝐽 = ( 𝛼 − 2𝑥 − 2𝛽𝑥𝑦 (1 + 𝑥2)2 𝛽𝑥2 1 + 𝑥2 2𝛽1𝑥𝑦 (1 + 𝑥2)2 𝛽1𝑥2 1 + 𝑥2 − 𝛾 ) .
Pelinearan titik tetap 𝑇2(𝛼, 0) akan diperoleh matriks Jacobi sebagai berikut:
𝐽(𝛼,0)= ( −𝛼 𝛽𝛼 2 1 + 𝛼2 0 𝛽1𝛼 2 1 + 𝛼2− 𝛾) .
Kemudian dicari nilai eigennya dengan menggunakan persamaan karakteristik
𝑑𝑒𝑡(𝐽(𝛼,0)− 𝜆𝐼) = 0 sehingga diperoleh || −𝛼 − 𝜆 𝛽𝛼 2 1 + 𝛼2 0 𝛽1𝛼 2 1 + 𝛼2− 𝛾 − 𝜆 || = 0 (−𝛼 − 𝜆) ( 𝛽1𝛼 2 1 + 𝛼2 − 𝛾 − 𝜆) = 0, dari sini diperoleh:
𝜆 = −𝛼 ∩ 𝜆 = 𝛽1𝛼 2 1 + 𝛼2 − 𝛾 = −𝛾(1 + 𝛼2) + 𝛽 1𝛼2 1 + 𝛼2 .
Jadi nilai eigennya adalah sebagai berikut:
𝜆1 = −𝛼, 𝜆2 =
𝛽1𝛼2 1 + 𝛼2− 𝛾.
Pelinearan titik tetap 𝑇3(𝑥∗, 𝑦∗) diperoleh matriks Jacobi sebagai berikut:
𝐽(𝑥∗,𝑦∗) = ( 𝛼 − 2𝑥∗− 2𝛽𝑥∗𝑦∗ (1 + 𝑥∗2)2 − 𝛽𝑥∗2 1 + 𝑥∗2 2𝛽1𝑥∗𝑦∗ (1 + 𝑥∗2)2 𝛽1𝑥∗2 1 + 𝑥∗2 − 𝛾 )
𝐽(𝑥∗,𝑦∗) = ( 𝛼 − 2𝑥∗− 2𝛽𝑥∗𝑦∗ (1 + 𝑥∗2)2 − 𝛽𝑥∗ 2 1 + 𝑥∗2 2𝛽1𝑥∗𝑦∗ (1 + 𝑥∗2)2 0 ) .
Kemudian dicari nilai eigennya dengan menggunakan persamaan karakteristik
𝑑𝑒𝑡(𝐽(𝑥∗,𝑦∗)− 𝜆𝐼) = 0 sehingga diperoleh || 𝛼 − 2𝑥∗− 2𝛽𝑥∗𝑦∗ (1 + 𝑥∗2)2 − 𝜆 − 𝛽𝑥∗ 2 1 + 𝑥∗2 2𝛽1𝑥∗𝑦∗ (1 + 𝑥∗2)2 −𝜆 || = 0 𝜆2− 𝜆 (𝛼 − 2𝑥 ∗− 2𝛽𝑥∗𝑦∗ (1 + 𝑥∗2)2 ) +2𝛽𝛽1𝑥∗ 3𝑦 ∗ (1 + 𝑥∗2)3 = 0 𝜆2+ 𝜆𝐴 1+ 𝐴2 = 0 dari sini diperoleh:
𝜆1 = −𝐴1+ √𝐴12 − 4𝐴 2 2 , 𝜆2 = −𝐴1 − √𝐴12− 4𝐴 2 2 , dengan 𝐴1 = 𝑡𝑟𝑎𝑐𝑒(𝐽) = − (𝛼 − 2𝑥∗− 2𝛽𝑥∗𝑦∗ (1 + 𝑥∗2)2), 𝐴2 = 𝑑𝑒𝑡(𝐽) =2𝛽𝛽1𝑥∗ 3𝑦 ∗ (1 + 𝑥∗2)3 .
Lampiran 4 Penurunan kondisi 𝐴1 = 𝑡𝑟𝑎𝑐𝑒(𝐽)
Diketahui: 𝐴1 = 𝑡𝑟𝑎𝑐𝑒(𝐽) = − (𝛼 − 2𝑥∗− 2𝛽𝑥∗𝑦∗ (1 + 𝑥∗2)2 ), 𝐴2 =2𝛽𝛽1𝑥∗ 3𝑦 ∗ (1 + 𝑥∗2)2 , 𝐵 = 𝐴12− 4𝐴 2, 𝑥∗ = √ 𝛾 𝛽1− 𝛾 , 𝑦∗ = (𝛼 − 𝑥∗)(1 + 𝑥∗ 2) 𝛽𝑥∗ , 𝐴1 < 0
− (𝛼 − 2𝑥∗− 2𝛽𝑥∗𝑦∗ (1 + 𝑥∗2)2 ) < 0 𝛼 − 2𝑥∗− 2𝛽𝑥∗𝑦∗ (1 + 𝑥∗2)2 > 0 𝛼 − 2𝑥∗− 2𝛽𝑥∗ (1 + 𝑥∗2)2 ∙(𝛼 − 𝑥∗)(1 + 𝑥∗ 2) 𝛽𝑥∗ > 0 𝛼 − 2𝑥∗−2(𝛼 − 𝑥∗) 1 + 𝑥∗2 > 0 (𝛼 − 2𝑥∗)(1 + 𝑥∗ 2) − (𝛼 − 𝑥 ∗) 1 + 𝑥∗2 > 0 𝛼 + 𝛼𝑥∗2− 2𝑥∗− 2𝑥∗3− 2𝛼 + 2𝑥∗ 1 + 𝑥∗2 > 0 −𝛼 + 𝛼𝑥∗2 − 2𝑥 ∗ 3 > 0 𝛼(𝑥∗2− 1) > 2𝑥∗3 𝛼 > 2𝑥∗ 3 𝑥∗2 − 1 𝛼 > 2𝑥∗ 3 𝛾 𝛽1−𝛾− 1 𝛼 > 2𝑥∗ 3 2𝛾−𝛽1 𝛽1−𝛾 𝛼 > 2𝑥∗𝛾 𝛽1− 𝛾∙ 𝛽1− 𝛾 2𝛾 − 𝛽1 𝛼 > 2𝑥∗𝛾 2𝛾 − 𝛽1 𝐴1 > 0 − (𝛼 − 2𝑥∗− 2𝛽𝑥∗𝑦∗ (1 + 𝑥∗2)2) > 0 𝛼 − 2𝑥∗− 2𝛽𝑥∗𝑦∗ (1 + 𝑥∗2)2 < 0 𝛼 − 2𝑥∗− 2𝛽𝑥∗ (1 + 𝑥∗2)2 ∙(𝛼 − 𝑥∗)(1 + 𝑥∗ 2) 𝛽𝑥∗ < 0 𝛼 − 2𝑥∗− 2(𝛼 − 𝑥∗) 1 + 𝑥∗2 < 0 (𝛼 − 2𝑥∗)(1 + 𝑥∗2) − (𝛼 − 𝑥∗) 1 + 𝑥∗2 < 0 𝛼 + 𝛼𝑥∗ 2− 2𝑥 ∗− 2𝑥∗3− 2𝛼 + 2𝑥∗ 1 + 𝑥∗2 < 0 −𝛼 + 𝛼𝑥∗2− 2𝑥 ∗3 < 0 𝛼(𝑥∗2− 1) < 2𝑥 ∗3 𝛼 < 2𝑥∗ 3 𝑥∗2 − 1
𝛼 < 2𝑥∗ 3 𝛾 𝛽1−𝛾− 1 𝛼 < 2𝑥∗ 3 2𝛾−𝛽1 𝛽1−𝛾 𝛼 < 2𝑥∗𝛾 𝛽1− 𝛾 ∙ 𝛽1− 𝛾 2𝛾 − 𝛽1 𝛼 < 2𝑥∗𝛾 2𝛾 − 𝛽1
RIWAYAT HIDUP
Penulis dilahirkan di Indramayu pada tanggal 23 Juli 1990 dari Bapak Agus dan Ibu Juenah. Penulis merupakan putra keempat dari empat bersaudara. Tahun 2002 penulis lulus dari SD Negeri Karanganyar, tahun 2005 penulis lulus dari SMP Negeri 1 Terisi, dan tahun 2008 penulis lulus dari SMA Negeri 1 Sindang. Penulis diterima sebagai mahasiswa Institut Pertanian Bogor pada tahun 2008 melalui jalur Seleksi Nasional Masuk Perguruan Tinggi Negeri (SNMPTN) Jurusan Matematika sebagai mayor. Pada tingkat kedua penulis memilih Statistika Terapan sebagai minor. Selama mengikuti perkuliahan, penulis pernah menjadi pengajar les Kalkulus TPB. Saat Tingkat Persiapan Bersama, penulis mendapatkan beasiswa pemerintah daerah Jawa Barat, pemerintah daerah Indramayu, dan LAZ Al-Hurriyyah. Pada tahun 2011-2013, penulis mendapat beasiswa Karya Salemba Empat.
Penulis aktif dalam organisasi kemahasiswaan seperti organisasi mahasiswa daerah dan organisasi intra kampus. Pada tahun 2009-2010, penulis menjadi sekretaris umum Ikatan Keluarga dan Mahasiswa dharma Ayu (IKADA) sebagai sekretasi umum. Pada tahun 2010, penulis menjadi anggota Departemen Internal Badan Eksekutif Mahasiswa (BEM) Fakultas Matematika dan Ilmu Pengetahuan Alam. Pada tahun 2011, penulis menjadi ketua Departemen Advokasi dan Kesejahteraan Mahasiswa Badan Eksekutif Mahasiswa (BEM) Fakultas Matematika dan Ilmu Pengetahuan Alam. Pada tahun 2012, penulis menjadi koordinator Kesejahteraan Mahasiswa se-IPB Badan Eksekutif Mahasiswa Keluarga Mahasiswa IPB.
Penulis juga aktif dalam berbagai kepanitiaan seperti kepanitiaan Masa Perkenalan Kampus Mahasiswa Baru 2009, Pesta Sains 2009 dan 2010, SPIRIT 2010, Masa Perkenalan Fakultas Matematika dan Ilmu Pengetahuan 2010 dan 2011, POKJA SPP dan POKJA Beasiswa 2012, dan kepanitiaan lainnya. Selain itu penulis juga pernah menjadi moderator seminar Lokakarya Kementerian Lingkungan Hidup, moderator Kajian Seputar Kampus Institut Pertanian Bogor 2012, master of ceremony, Dialog Rektor Institut Pertanian Bogor 2012, fasilitator
Up Grading, pengisi acara musikalisasi puisi Mipa Go Green 2011, pengisi acara akustik Saresehan Lingkungan Hidup Badan Eksekutif Mahasiswa Keluarga Mahasiswa Institut Pertanian Bogor 2012, dan acara-acara lainnya.