SOAL UAS
PENGOLAHAN SINYAL
DIGITAL
WADARMAN JAYA TELAUMBANUA
1304405027
JURUSAN TEKNIK ELEKTRO DAN KOMPUTER
FAKULTAS TEKNIK
UNIVERSITAS UDAYANA
JIMBARAN
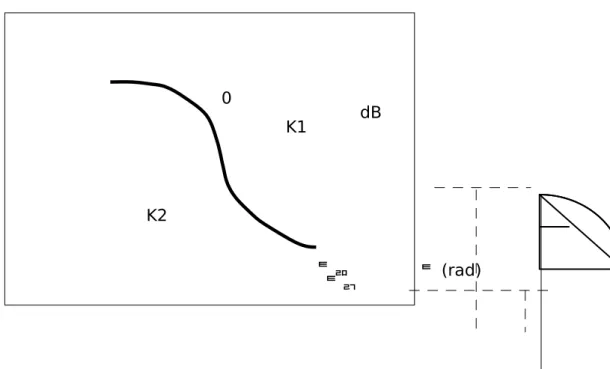
dB K1 0 (rad) K2
Rancang Filter low pass digital IIR Butterworth yang dapat meloloskan sinyal yang memiliki frekuensi 50 Hz, dari sinyal kompleks x(t) = sin(250t) + 2sin(2100t) + 0,5sin(2150t).
Jawab:
Diketahui frekuensinya adalah 50 Hz. Maka periodenya : T= 1f=501 =0,02 jadi 2 x 10-2 detik
a. Magnitude square response filter digital
Dimana, 1 = (2 f1)/f = (2 1)/50 = 0,04 rad 2 = (2 f2)/f = (2 )/50 = 0,08 rad
ω3 = (2 f2)/f = (2 3)/50 = 0,12 rad
Bila dilakukan transformasi ke bentuk filter analog , maka gambar 1 dapat dinyatakan seperti gambar 2 di bawah:
dB K1 0 r K2
b. Magnitude square response filter analog ekivalen
Dimana Ω1= 2 Ttan ω1 2 =100 tan 0,04 π 2 =6,29 Ω2=2 Ttan ω2 2 =100 tan 0,08 π 2 =12,63 Ω3=2 Ttan ω3 2 =100 tan 0,12 π 2 =19,08
Dan bila dilakukan transformasi ternormalisasi, maka gambar 2 dapat dinyatakan sebagai berikut:
Gambar 1.2 Magnitude Square Response Filter Analog Ekivalen
c. Magnitude square response LPF analog normalisasi
Dimana Ω2,1= Ω2 Ω1 =12,63 6,29 =2,008 Ωtot=Ω2,1 Ω3 =19,08 2,008=9,5
K1
0
r
Gambar 1.3 Magnitude Square Response LPF Analog Normalisasi
1 Ωtot 1 9,5 2 log(¿) 2 log(¿)= log[10 0,1 −1 100,2−1¿10 0,3 −1] ¿ n= log[10 −K1 10 −1 10 −K2 10 −1 /10 −K3 10−1] ¿
Pembulatan keatas didapat harga orde filter n = 1. Sehingga dari table polynomials Butterworth didapat :
Bn(s)=1+s
e. Persamaan H(s) LPF analog normalisasi
sehingga untuk Filter Low-Pass orde 2 ternormalisasi berlaku:
Hlpf(s)= 1
Bn(s)
= 1
1+ s
f. Persamaan Fungsi Transfer H(s) LPF analog hasil disain
Dengan mengganti variable s dengan s/maka pada Filter Low-Pass
Hlpf(s)=Hlpf(s )
|
s=s /Ω1= 1 Bn(s) = 1 s Ω1+1 = 1 s 6,29+1g. Persamaan Fungsi Transfer H(z) LPF digital hasil disain
H (z )=Hlpf(s )
|
s=2(1−z −1 ) T (1+z−1)= 1 100 6,29(
1−z−1 1+z−1)
+1 H (z )= 1 15,89(
1−z −1 1+z−1)
+1 H (z )= (1+ z −1 )❑ 15,89(
1−z−1)
+(1+z−1) H (z )= (1+z −1 )❑ 16,89−16,89 z−1Bentuk umum persamaan transfer function H(z) dapat ditulis sebagai berikut :
H (z )=B (z) A(z )=
b0+b1z−1+b2z−2+… bnz−n
a0+a1z−1+a2z−2+…+anz−n
Suatu filter digital dapat juga dispesifikasikan dengan menggunakan persamaan beda standar yang mempunyai bentuk umum sebagai berikut :
y (n)=
∑
k=0 N1 bkx (n−k )−∑
k=1 N2 aky (n−k )Dimana ak dan bk didapat dari persamaan umum transfer function H(z). Apabila a0 dibuat menjadi
sama dengan satu (a0 = 1), maka persamaan transfer function H(z) dari Filter Low-Pass digital
yang direncanakan menjadi :
H (z )=0,0592+0,0592 z
−1
1−1 z−1
Sehingga persamaan beda y(n), dari Filter Low-Pass digital yang direncanakan menjadi y(n) = 0,0592 x(n) + 0,0592 x(n-1) + 0 x(n-2) -1 y(n-1) +0 y(n-2)
x(n) z-1 z-1 z-1 0,0592 0,0592 0 -1 0
Realisasi rangkaian dari persamaan diatas :
1.1 MatLab Implementation
Berikut ini adalah listing program MatLab untuk pembuktian LPF yang telah dirancang menurut perhitungan pada sub-bab 1.1
clc; clear all; close all;
k1=-3; k2=-10; k3=-5; f1=50; f2=100; f3=150; fs=10000; Ts=1/fs; f=(0:255)/256*(fs/2); t=0:Ts:0.025; q = f*2*Ts
%LISTING PROGRAM UNTUK MENGHITUNG NILAI ORDE FILTER n
w1=(2*pi*f1)/fs; w2=(2*pi*f2)/fs; w3=(2*pi*f3)/fs;
omega1=2/Ts*tan(w1/2); omega2=2/Ts*tan(w2/2);
omega3=2/Ts*tan(w3/2);
omegar=(omega2/omega1)/omega3;
n=(log10((10^(-k1/10)-1)/(10^(-k2/10)-1)/(10^(-k3/10)-1)))/ (2*log10(1/omegar));
%KOEFISIEN HASIL PERHITUNGAN
B1=0.0592; B2=0.0592; B3=0; A1=1; A2=-1; A3=0;
%KOEFISIEN FILTER DARI HASIL PERHITUNGAN MANUAL
B=[B1 B2 B3]; A=[A1 A2 A3];
%LISTING PROGRAM MENGHITUNG RESPON FREKUENSI FILTER Hejw
[H,w]=freqz(B,A,100);
%SINYAL INPUT
x=sin(2*pi*50*t)+2*sin(2*pi*100*t)+0.5*sin(2*pi*150*t);
%RESPON IMPULS INPUT xn
xn=x(1:200);
%LISTING PROGRAM MENGHITUNG MAGNITUDO SINYAL INPUT X(ejw)
xf=fft(xn,512) X=xf(1:256)
%LISTING PROGRAM MENGHITUNG RESPON IMPULS OUTPUT yn
for n=1:200; if n==1; y(n)=B1*x(n); elseif n==2; y(n)=B1*x(n)+B2*x(n-1)-A2*y(n-1); elseif n>=3; y(n)=B1*x(n)+B2*x(n-1)+B3*x(n-2)-A2*y(n-1)-A3*y(n-2); end end
%LISTING PROGRAM MENGHITUNG MAGNITUDO SINYAL OUTPUT Yejw
yf=fft(y,512); Y=yf(1:256);
hertz=w/(2*pi*Ts);
%LISTING PROGRAM UNTUK PLOT GRAFIK
figure(1); plot(t,x);
title('Grafik Sinyal Input, x(t)')
xlabel('Waktu t, (detik)')
ylabel('Amplitudo')
grid on; figure(2)
plot(f,abs(X));
xlabel('Frekuensi, (hertz)')
ylabel('Magnitudo,|X(f)|')
grid on; figure(3); stem(1:200,xn);
title('Grafik Sinyal Input Diskrit, x(n)')
xlabel('Sampling ke-n')
ylabel('x(n)')
axis([1 200 -3.5 3.5]); grid on;
figure(4)
plot(f*2*Ts,abs(X));
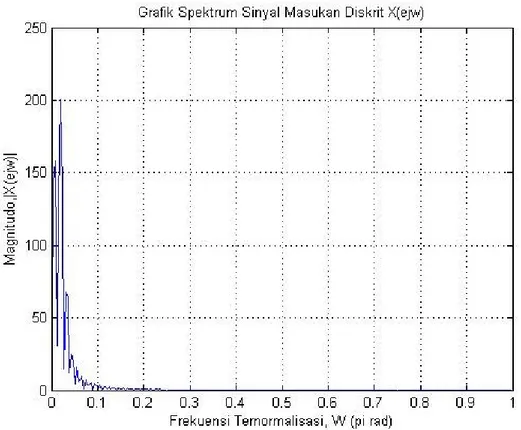
title('Grafik Spektrum Sinyal Masukan Diskrit X(ejw)')
xlabel('Frekuensi Ternormalisasi, W (pi rad)')
ylabel('Magnitudo,|X(ejw)|')
grid on; figure(5)
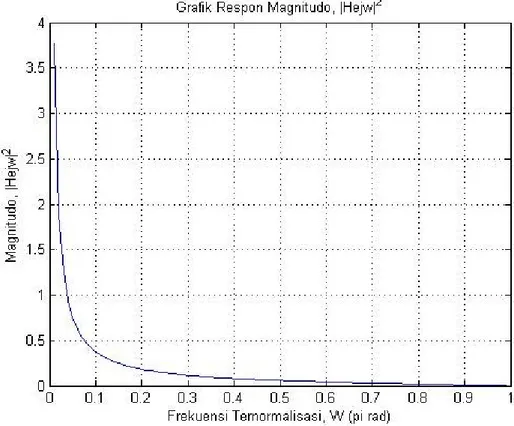
plot(w/pi,abs(H));
title('Grafik Respon Magnitudo, |Hejw|^2')
xlabel('Frekuensi Ternormalisasi, W (pi rad)')
ylabel('Magnitudo, |Hejw|^2')
grid on
figure(6)
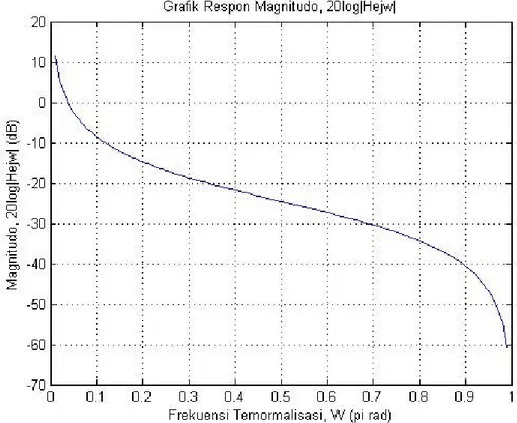
plot(w/pi,20*log10(abs(H)));
title('Grafik Respon Magnitudo, 20log|Hejw|')
xlabel('Frekuensi Ternormalisasi, W (pi rad)')
ylabel('Magnitudo, 20log|Hejw| (dB)')
grid on; figure(7);
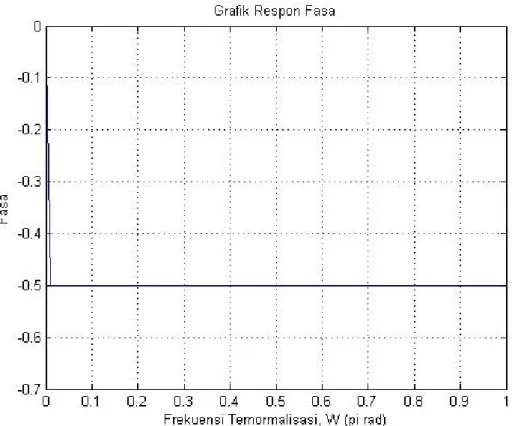
plot(w/pi,angle(H)/pi);
title('Grafik Respon Fasa')
xlabel('Frekuensi Ternormalisasi, W (pi rad)')
ylabel('Fasa')
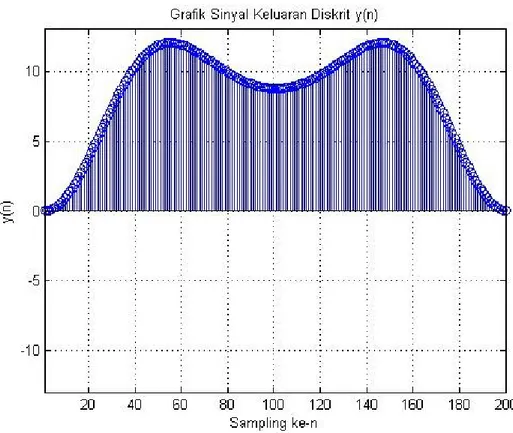
grid on; figure(8); stem(1:200,y);
title('Grafik Sinyal Keluaran Diskrit y(n)')
xlabel('Sampling ke-n')
ylabel('y(n)')
axis([1 200 -13 13]); grid on;
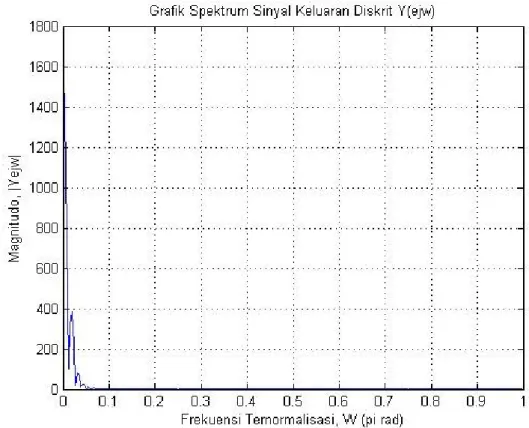
figure(9);
plot(f*2*Ts,abs(Y));
title('Grafik Spektrum Sinyal Keluaran Diskrit Y(ejw)')
xlabel('Frekuensi Ternormalisasi, W (pi rad)')
ylabel('Magnitudo, |Yejw|')
figure(10);
plot(t(1:200),y);
title('Grafik Sinyal Output y(t)')
xlabel('Waktu t, (detik)');
ylabel('Amplitudo, y(t))')
axis([0 0.02 -13 13]); grid on;
figure(11); plot(f,abs(Y));
title('Grafik Spektrum Sinyal Keluaran Y(f)')
xlabel('Frekuensi, hertz');
ylabel('Magnitudo, |Y(f)|')
grid on;
Listing Program 1.1 Pembuktian LPF untuk f1 50 Hz f2 100 Hz dan f3 150
Berdasarkan listing program 1.1, maka didapatkan sinyal inputan dalam bentuk kontinyu adalah:
Sinyal input kompleks pada gambar 1.5 dalam listing program 1.1 dituliskan dengan:
%SINYAL INPUT
x=sin(2*pi*50*t)+2*sin(2*pi*100*t)+0.5*sin(2*pi*150*t);
Sinyal ini berbentuk sinyal kontinyu yang terdiri atas dua frekuensi, 50 Hz, 100 Hz, dan 150 Hz. Gabungan sinyal dengan frekuensi 50 Hz, 100 Hz, 150 Hz akan menghasilkan gambar seperti pada gambar 1.5
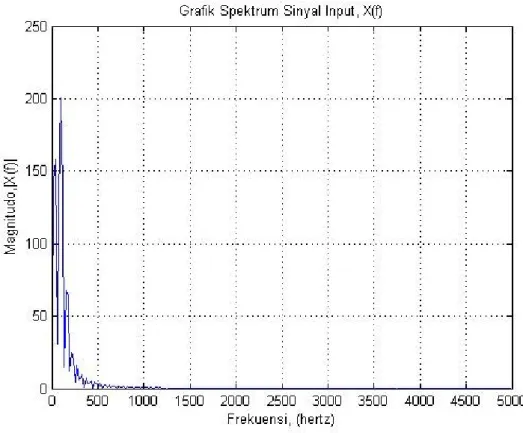
Selanjutnya adalah melihat spectrum sinyal input kompleks. Oleh karena sinyal input kompleks terdiri atas tiga frekuensi maka akan ada tiga sprektrum frekuensi yang naik seperti pada gambar 1.6 berikut.
Gambar 1.6 Spektrum Sinyal Inputan Kompleks Analog x(t) = sin (250t) + sin (2100t) + sin (2150t)
Spektrum sinyal Gambar 1.6 didapat dengan memplotkan frekuensi dan nilai absolute dari magnitudo sinyal. Magnitudo sinyal didapatkan dengan melakukan Fast Fourier Transform (FFT) pada respon impulse sinyal inputan kompleks
dengan size FFT adalah 512. Sinyal input (x) memiliki ukuran matriks 1 x 251 (baris x kolom), kemudian untuk respon impulse (xn) digunakan bagian sinyal inputan (x) yang pertama sampai bagian sinyal ke-200 sehingga menghasilkan matriks 1 x 200. Kemudian respon impulse (xn) dengan matriks 1 x 200, mengalami transformasi fourier cepat (xf) dengan FFT size 512, sehingga didapatkan matirks berukuran 1 x 512. Dari hasil transformasi ini yang diambil hanya bagian pertama sampai ke-256 dari xf dan disimpan dalam variabel X. Listing program yang menunjukkan hal tersebut adalah
%SINYAL INPUT
x=sin(2*pi*50*t)+2*sin(2*pi*100*t)+0.5*sin(2*pi*150*t);
%RESPON IMPULS INPUT xn
xn=x(1:200);
%LISTING PROGRAM MENGHITUNG MAGNITUDO SINYAL INPUT X(ejw)
xf=fft(xn,512) X=xf(1:256)
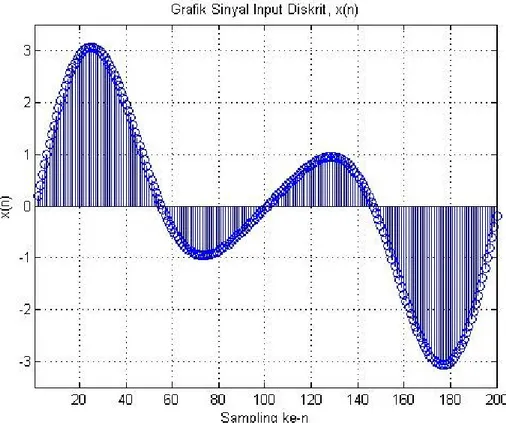
Kemudian mengubah sinyal kontinyu pada gambar 1.5 menjadi bentuk diskret. Sinyal diskret didapat dengan memplot nilai 1:200 (sumbu x) dan xn (sumbu y). Dimana xn adalah respon impulse dari sinyal inputan (x) yang diambil pada nilai (x) 1 sampai 200. Berikut adalah sinyal diskret xn.
Gambar 1.7 Sinyal Input Diskret
Gambar 1.8 Spektrum Sinyal Input Diskret
Spektrum ini didapat dengan memplotkan nilai dari fx2xTs dengan nilai absolut dari hasil FFT. Nilai fx2xTs menghasilkan frekuensi ternormalisasi dalam bentuk rad
Hasil dari transformasi menghasilkan sinyal dengan bilangan kompleks, terdiri atas bagian real dan imaginer. Sinyal dengan bilangan kompleks akan memiliki nilai magnitudo dan sudut. Magnitudo dalam karakteristik filter ini diinisialisasikan dengan |H(ej)|2 . Selanjutnya adalah karakterisktik Filter dengan
melihat grafik magnitude squared respon frekuensi dengan jumlah orde filter (n) = 7, yang ditunjukkan pada gambar 1.8 berikut.
Gambar 1.8 Magnitude Squared Frequency Response H|(ej)| Filter Butterworth
Gambar 1.8 didapat memplotkan w/pi dengan nilai absolute dari H. Dimana H dan w merupakan variabel untuk menyimpan hasil perhitungan magnitude squared respon frekuensi (H|(ej)|2) filter tersebut. Dalam menghtiung respon frekuensi ini
digunakan koefisein filter A dan B yang didapat dalam perhitungan pada sub-bab 1.1. Nilai H dan w didapat melalui listing program berikut.
%LISTING PROGRAM MENGHITUNG RESPON FREKUENSI FILTER Hejw
[H,w]=freqz(B,A,100);
Selanjutnya adalah melihat respon magnitudo dalam satuan dB. Sehingga nilai H|(ej)|2 akan berubah menjadi 20logH|(ej)|. Dengan begitu grafiknya pun
Gambar 1.9 Magnitude Squared Frequency Response 20logH|(ej)| Filter Butterworth
Selanjutnya adalah karakteristik Filter ditinjau dari fasanya. Grafik respon fasa (ej) ini didapat dengan memplotkan w/pi dan sudut dari H dibagi pi.
Dimana H dan w merupakan hasil perhitungan magnitude squared frequency response. Dari hasil plot tersebut didapat respon fasa sebagai berikut.
Gambar 1.10 Respon Fasa Filter Butterworth
Kemudian, berdasarkan pada rumus y(n) dengan memasukkan nilai koefisien filter B dan A untuk n = 3 , maka akan didapatkan output dari low pass filter tersebut. Berikut ini adalah sintaks dari koefisien filter A dan B serta rumus y(n) sebagai output low pass filter.
Dengan mentransformasikan nilai output y(n) filter dengan menggunakan FFT, maka didapatkan sinyal diskret sebagai berikut.
Gambar 1.11 Output Filter Butterworth Dalam Bentuk Sinyal Diskret
Gambar 1.14 Output Filter Butterworth Dalam Bentuk Sinyal Analog
Kemudian, spektrum dari sinyal pada gambar 1.13 tersebut ditunjukkan oleh gambar 1.14.