PENGENLAN WICARA UNTUK
PERINTAH GERAK ROBOT HUMANOID
Lukman Arif Kurniawan, Dr.Tri Arief Sardjono, ST.,MT., Dr. Ir. Djoko Purwanto, M.Eng.Jurusan Teknik Elektro FTI - ITS
Abstrak—Pengenalan wicara adalah sebuah sistem untuk pengenalan suara yang digunakan dengan melatihkan suara pembicara tertentu terhadap sistem ini, untuk kemudian dilakukan penerjemahan terhadap suara tersebut. Dalam hal ini penerjemahan suara dapat diimplementasikan menjadi sebuah nilai tertentu atau berupa tulisan, gerakan dan sebagainya Pada Tugas Akhir ini penulis mencoba membuat sebuah sistem pengenalan wicara sederhana, dimana sistem ini mampu menerima perintah wicara terbatas dari suara manusia secara langsung, yang diterima oleh sebuah tranduser suara dengan menggunakan electret condenser microphone dan kemudian diproses oleh komputer utuk diambil data frekuensi suara. Dari hasil proses ini, maka akan didapat sebuah output berupa frekuensi karakter dominan suara yang diinginkan, sinyal input suara ini akan diterjemahkan oleh komputer menggunakan neural network untuk kemudian dipakai sebagai sinyal input mikrokontroller 1 sebagai master dan disampaikan ke mikrokontroller 2 sebagai slave dalam melakukan gerakan sederhana melalui sebuah robot humanoid sederhana yang telah dibuat sesuai perintah wicara yang telah diucapkan. Dalam melakukan pengaturan keseimbangan badan, robot humanoid ini dibantu oleh sebuah gyroscope.
Berdasarkan pengujian didapatkan bahwa kemampuan sistem pengenalan wicara untuk perintah gerak robot humanoid yang dibuat memiliki tingkat keberhasilan sekitar 73,33%.
Kata kunci: voice recognition, robot humanoid, neural network, gyroscope.
I. PENDAHULUAN
Salah satu bukti dari kemajuan teknologi pada masa ini adalah teknologi pengenalan wicara. Pengenalan wicara adalah sebuah sistem untuk pengenalan suara yang digunakan dengan melatihkan suara pembicara tertentu terhadap sistem ini, untuk kemudian dilakukan penerjemahan terhadap suara tersebut. Dalam hal ini penerjemahan suara dapat diimplementasikan menjadi sebuah nilai tertentu atau berupa tulisan, gerakan dan sebagainya[1].
Pada Tugas Akhir ini penulis mencoba membuat sebuah sistem pengenalan wicara sederhana, dimana sistem ini mampu menerima perintah wicara terbatas dari suara manusia secara langsung, yang diterima oleh sebuah tranduser suara dengan menggunakan electret condenser microphone dan kemudian diproses oleh komputer utuk diambil
data frekuensi suara. Dari hasil proses ini, maka akan didapat sebuah output berupa frekuensi karakter dominan suara yang diinginkan, sinyal input suara ini akan diterjemahkan oleh komputer menggunakan
neural network untuk kemudian dipakai sebagai
sinyal input mikrokontroller dalam melakukan gerakan sederhana melalui sebuah robot humanoid sederhana yang telah dibuat sesuai perintah wicara yang telah diucapkan.
II. TEORI PENUNJANG
Teori yang digunakan meliputii tranduser suara khususnya electret condenser microphone, gyroscope serta perhitungan menggunakan Neural Network menggunakan MLP (multilayer perceptron) dengan metode feedforward dan backpropagation.
A. T
randuser Suara (Electret Condenser Microphone)
. Electret adalah sebuah bahan dielektrik yang stabil dengan muatan listrik statis permanen yang tertanam (yang memiliki daya tahan tinggi dan stabilitas materi secara kimia, tidak akan rusak selama ratusan tahun seperti
Polytetrafluoroethylene).
Gambar 2.1 Bagian Utuh ECM [2]
Prinsip kerja tranduser, respon frekuensi yang naik masuk ke mikrofon kondensor timbul dari mekanisme pada gambar 2.2 [3].
Gambar 2.2 Prinsip kerja ECM
Prinsip kerja ECM yaitu sinyal suara
menggetarkan membrane ECM sehingga terjadi perubahan kapasitansi. Ketika terjadi perubahan posisi membran, terjadi perubahan muatan, memberikan arus listrik melalui resistor R. Besar muatan membran tergantung pada besar getaran dan jarak suara terhadap mikrofon. Struktur Kapasitansi membran plat sejajar sesuai oleh persamaan:
(2.1)
Dimana:
Q = muatan magnitudo yang disimpan di tiap plat (C)
V= tegangan yang diberikan pada pelat (V)
B. Gyroscope
Gyroscope adalah perangkat untuk mengukur atau
mempertahankan orientasi arah, berdasarkan prinsip-prinsip konservasi momentum sudut. Pada dasarnya, sebuah giroskop mekanik adalah roda yang berputar bebas untuk mengambil setiap orientasi perubahan arah. Orientasi perubahan arah ini jauh lebih sedikit mengalami perubahan sebagai respon terhadap torsi eksternal yang diberikan dibandingkan dengan tanpa besar momentum sudut yang terkait dengan rate perubahan putaran gyroscope. Berikut adalah gambar dari gyroscope [4].
Gambar 2.3 Konfigurasi pin Gyroscope Konfigurasi pin axis X dan pin axis Y:
1. ADC : Output kecepatan sudut yang diubah menjadi sinyal analog untuk axis X.
2. GND 3. VCC ( 5V ) 4. VCC ( 5V ) 5. GND
6. ADC : Output kecepatan sudut yang diubah menjadi sinyal analog untuk axis Y.
C. Algoritma Gerak Robot
Walking pattern dari sebuah robot humanoid
dibedakan menjadi dua, yaitu antara berjalan statis dan berjalan dinamis. Dan di sini akan dijelaskan mengenai berjalan statis. Pada saat ini, ZMP (Zero Moment Point) yang menunjukkan stabilitas dinamis yang digunakan dalam banyak robot, dan lintasan rencana berjalan telah banyak dipelajari. Selain itu,
di sisi lain, robot berjalan dengan teknik generasi gerak irama pola generator CPG (Central Pattern Generator) dan gerakan refleks dengan mengacu pada model makhluk hidup. Dalam kasus ini, pertama, hanya ZMP itu digunakan untuk mengontrol postur. Kemudian, stabilisasi dengan ZMP dan pola gaya yang dihasilkan dengan gerak refleks CPG dan digabungkan untuk mencapai sebuah gerakan untuk berjalan yang mantap.
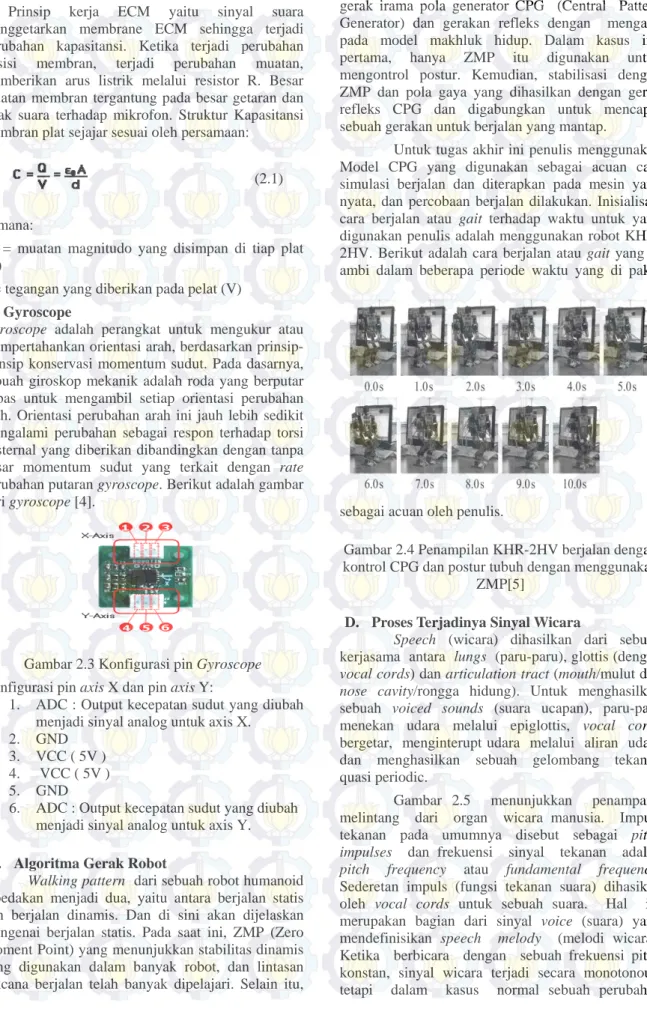
Untuk tugas akhir ini penulis menggunakan Model CPG yang digunakan sebagai acuan cara simulasi berjalan dan diterapkan pada mesin yang nyata, dan percobaan berjalan dilakukan. Inisialisasi cara berjalan atau gait terhadap waktu untuk yang digunakan penulis adalah menggunakan robot KHR-2HV. Berikut adalah cara berjalan atau gait yang di ambi dalam beberapa periode waktu yang di pakai
sebagai acuan oleh penulis.
Gambar 2.4 Penampilan KHR-2HV berjalan dengan kontrol CPG dan postur tubuh dengan menggunakan
ZMP[5]
D. Proses Terjadinya Sinyal Wicara
Speech (wicara) dihasilkan dari sebuah
kerjasama antara lungs (paru-paru), glottis (dengan
vocal cords) dan articulation tract (mouth/mulut dan nose cavity/rongga hidung). Untuk menghasilkan
sebuah voiced sounds (suara ucapan), paru-paru menekan udara melalui epiglottis, vocal cords bergetar, menginterupt udara melalui aliran udara dan menghasilkan sebuah gelombang tekanan quasi periodic.
Gambar 2.5 menunjukkan penampang melintang dari organ wicara manusia. Impuls tekanan pada umumnya disebut sebagai pitch
impulses dan frekuensi sinyal tekanan adalah pitch frequency atau fundamental frequency.
Sederetan impuls (fungsi tekanan suara) dihasikan oleh vocal cords untuk sebuah suara. Hal ini merupakan bagian dari sinyal voice (suara) yang mendefinisikan speech melody (melodi wicara). Ketika berbicara dengan sebuah frekuensi pitch konstan, sinyal wicara terjadi secara monotonous, tetapi dalam kasus normal sebuah perubahan
permanen pada frekuensi dapat terjadi. Variasi frekuensi pitch dapat dilihat seperti pada Gambar 2.6.
Gambar 2.5 Organ Wicara Manusia[6]
Gambar 2.6 Variasi pada Frekuensi Pitch[6] Impuls pitch merangsang udara di dalam mulut, untuk suara tertentu juga merangsang nasal
cavity (rongga hidung). Ketika rongga
beresonansi, akan menimbulkan radiasi sebuah gelombang suara yang merupakan sinyal wicara. Kedua rongga beraksi sebagai resonators dengan karakteristik frekuensi resonansi masing-masing, yang disebut formant frequencies. Pada saat rongga mulut dapat mengalami perubahan besar, kita mampu untuk menghasilkan beragam pola ucapan suara yang berbeda.
Sinyal wicara merupakan sinyal yang bervariasi lambat sebagai fungsi waktu, dalam hal ini ketika diamati pada durasi yang sangat pendek (5 sampai 100 mili detik) karakteristiknya masih stasioner. Tetapi bilamana diamati dalam durasi yang lebih panjang (> 1/5 detik) karakteristik sinyalnya berubah untuk
merefleksikan wicara yang keluar dari pembicara. Gambar 2.7 menunjukkan tiga kondisi dasar sinyal wicara pada manusia.
Gambar 2.7 Tiga Kondisi Dasar Sinyal Wicara Manusia [6]
Salah satu cara dalam menyajikan sebuah sinyal wicara adalah dengan menampilkannya dalam tiga kondisi dasar, yaitu
silence (S) atau keadaan tenang dimana sinyal
wicara tidak diproduksi. Unvoice (U) dimana
vocal cord tidak berfibrasi, dan yang ketiga adalah voiced (V) dimana vocal cord bervibrasi secara
periodik sehingga dapat menggerakkan udara ke kerongkongan melalui mekanisme akustik sampai keluar mulut dan menghasilkan sinyal wicara.
E. Neural Network
Neural network adalah salah satu tipe metode
learning data dengan menggunakan filosofi jaringan
syaraf manusia yang sangat kompleks. ANN (artificial neural network) merupakan sebuah sistem konektifitas yang dikhususkan untuk pemodelan atau pengelompokan dengan prinsip sistem syaraf pusat, Berdasarkan ilmu biologi, ilmu tersebut memberikan sebuah ide bagaimana cara melakukan sebuah kemampuan komputasi dengan ANN untuk menyelesaikan persoalan sensorik dan diharapkan dapat dilakukan dengan cara yang mudah.
Multi Layer Perceptron (single-layer dengan
tambahan beberapa hidden layer) kemungkinan mempunyai pengaruh yang sangat penting pada neural network sebagaimana yang kita ketahui sekarang. Pada umumnya, perceptron proses pelatihannya bergantung pada aturan pelatihan pola (pattern) yang digunakan, walaupun perceptron merupakan proses pelatihan yang bersifat Self –
organizing.Proses dalam algoritma backpropagation
dapat dibagi dalam dua tahap yaitu: ¾ Umpan maju (feed forward)[7]
¾ Propagasi balik (backpropagation) dan Perubahan bobot (update bobot)[8].
Gambar 2.8 Jaringan Feed Forward dan
Backpropagation
Algoritma pelatihan neural network yang diuraikan sebagai berikut:
Forward :
1. Data input diperoleh dari sampling suara, dengan weight awal pelatihan random.
2. Kemudian dilakukan perhitungan di node layer1 3. Hasil masing – masing node layer1 di sebar menggunakan binary sigmoid function dan didapatkan pula hasil turunannya.
4. Kemudian dilakukan perhitungan yang sama terhadap node – node layer berikutnya.
Backward :
1. Didapatkan error pada node 3 2. Update Weight layer 3
3. Kemudian dapat hitung error pada node 2 4. Update Weight layer 2
5. Error pada node 1 dapat diperoleh 6. Update Weight layer 1
7. Gunakan Weight update pada input selanjutnya hingga semua input yang dimasukkan dapat terpenuhi
Main program :
1. Masukkan batas error yang dikehendaki terbatas pada jumlah array yang disediakan
2. Ulangi proses forward dan backward hingga terpenuhi batas error yang diinginkan.
3. Setelah terpenuhi batasan error yang digunakan, weight disimpan
4. Weight yang tersimpan dilakukan clustering terhadap input yang didapat saat pendeteksian secara real time, hanya proses forward hingga batas error dipenuhi.
III. PERANCANGAN ALAT
Pada tahap ini akan dibahas perancangan alat mulai dari desain mekanik, desain elektronik, serta desain software. Perancangan alat dibuat secara bertahap dimulai dari desain mekanik, setelah selesai maka dilanjutka dengan desain rangkaian elektronik atau hardware, dan tahap akhir adalah desain
software.
A. Perancangan mekanik
Perancangan mekanik meliputi perancangan peletakan komponen-komponen robot yang lain. Gambar 3.1 berikut adalah desain mekanik robot yang telah jadi.
Gambar 3.1 Desain Mekanik Robot
Tahap pertama dalam pembuatan robot adalah perancangan mekanik. Dengan perancangan mekanik yag didahulukan, maka tahap perancangan selanjutnya dapat disesuaikan. Pada tugas akhir ini, rancangan robot yang akan dibuat memiliki 14 buah servo pada kaki, 7 kaki masing-masing pada tiap kaki dan 4 buah servo pada tiap-tiap tangan serta 1 buah servo pada badan dan kepala, dengan total 24 servo
keseluruhan. Kedua peluh empat motor servo dipasang pada pada hardware mekanik robot.
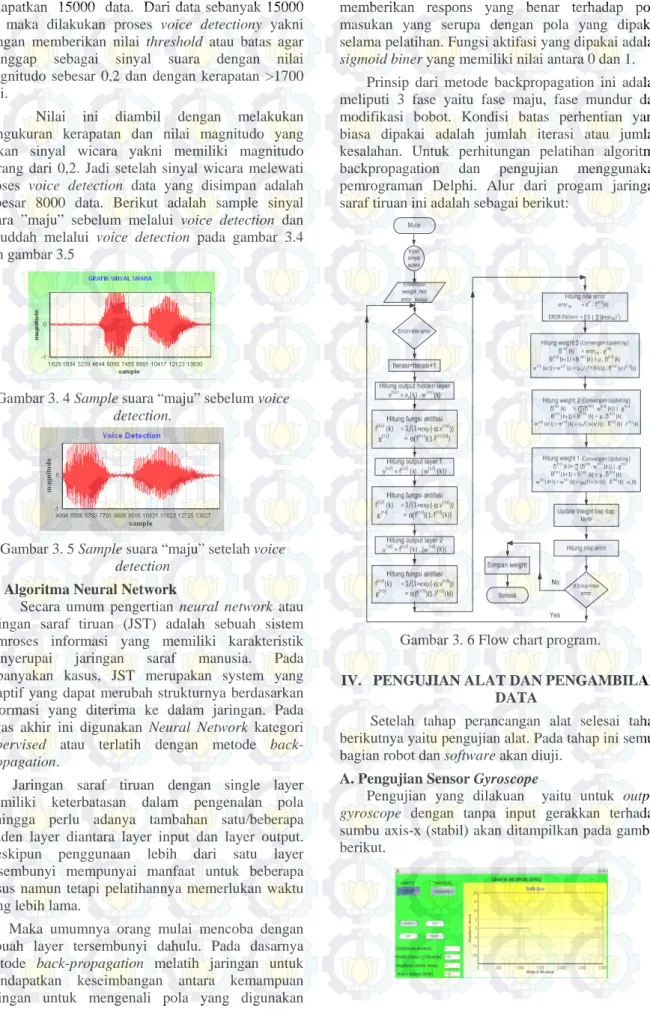
B. Blok Diagram Sistem
Sebelum melakukan desain perlu dilakukan
survey mengenai keberadaan komponen di pasaran.
Hal ini bertujuan agar peletakan komponen dapat tepat pada desain, sehingga memudahkan dalam pembuatannya. Selain itu proses kalkulasi matematis dari tiap karakteristik komponen dapat dilakukan secara cermat.
Bagian elektrik dibagi menjadi 2 blok, yaitu bagian slave sebagai kendali motor servo bagian tangan dan kepala, dan bagian master sebagai kendali motor servo bagian kaki dan badan serta kendali ADC dan Gyro. Gambar 3.2 merupakan blok diagram blok diagram elektronik bagian slave. Pada bagian ini mikrokontroler digunakan untuk mengontrol 16 buah motor servo yang menggunakan fasilitas timer 16 bit yaitu timer 1 dan timer 3. Mikrokontroller slave akan mengeluarkan output untuk menggerakkan motor servo ketika mendapat perintah serial dengan mikrokontroller master.
Pada bagian master digunakan untuk menangani kendali motor servo bagian kaki, badan,
ADC dan Gyro serta menerima perintah serial dari
komputer. Gambar 3.3 merupakan blok diagram elektronik bagian master.
Gambar 3. 2 Blok diagram elektronik bagian slave
Gambar 3. 3 Blok diagram elektronik bagian master
C. Perekaman Sinyal Wicara
Perekaman sinyal wicara dilakukan untuk mendapatkan sample data training. Sample tersebut direkam dengan frekuensi sampling sebesar 8 kHz dan diubah dalam bentuk format file ”.DAT”. Perekaman satu sample sinyal wicara membutuhkan waktu selama 1,5 detik, sehingga
MICRO MASTER Motor Servo 10 TIMER 1 & TIMER 3 Motor Servo 1 Out 1 Motor Servo 11 Motor Servo 9 Motor Servo 2 Motor Servo 3 USART RX Serial dengan komputer Motor Servo 4 Motor Servo 5 Motor Servo 6 Out 2 Motor Servo 7 Motor Servo 8 Out 3 Out 4 Out 5 Out 6 Out 7 Out 8 Out 9 Out 10 Out 11 Out 12 Out 13 Out 14 Out 15 Out 16 Motor Servo 12 Motor Servo 13 Motor Servo 14 Motor Servo 15 Motor Servo 16 USART TX Serial dengan micro slave ADC channel 1 Gyro M IC R O SLAVE M otor Servo 10 TIM ER 1 & TIM ER 3 M otor Servo 1 O ut 1 M otor Servo 11 M otor Servo 9 M otor Servo 2 M otor Servo 3 U SAR T R X Serial dengan m icro m aster M otor Servo 4 M otor Servo 5 M otor Servo 6 O ut 2 M otor Servo 7 M otor Servo 8 O ut 3 O ut 4 O ut 5 O ut 6 O ut 7 O ut 8 O ut 9 O ut 10 O ut 11 O ut 12 O ut 13 O ut 14 O ut 15 O ut 16 M otor Servo 12 M otor Servo 13 M otor Servo 14 M otor Servo 15 M otor Servo 16
dengan frekuensi sampling sebesar 10kHz didapatkan 15000 data. Dari data sebanyak 15000 ini maka dilakukan proses voice detectiony yakni dengan memberikan nilai threshold atau batas agar dianggap sebagai sinyal suara dengan nilai magnitudo sebesar 0,2 dan dengan kerapatan >1700 kali.
Nilai ini diambil dengan melakukan pengukuran kerapatan dan nilai magnitudo yang bukan sinyal wicara yakni memiliki magnitudo kurang dari 0,2. Jadi setelah sinyal wicara melewati proses voice detection data yang disimpan adalah sebesar 8000 data. Berikut adalah sample sinyal suara ”maju” sebelum melalui voice detection dan sesuddah melalui voice detection pada gambar 3.4 dan gambar 3.5
Gambar 3. 4 Sample suara “maju” sebelum voice
detection.
Gambar 3. 5 Sample suara “maju” setelah voice
detection
D. Algoritma Neural Network
Secara umum pengertian neural network atau jaringan saraf tiruan (JST) adalah sebuah sistem pemroses informasi yang memiliki karakteristik menyerupai jaringan saraf manusia. Pada kebanyakan kasus, JST merupakan system yang adaptif yang dapat merubah strukturnya berdasarkan informasi yang diterima ke dalam jaringan. Pada tugas akhir ini digunakan Neural Network kategori
supervised atau terlatih dengan metode back-propagation.
Jaringan saraf tiruan dengan single layer memiliki keterbatasan dalam pengenalan pola sehingga perlu adanya tambahan satu/beberapa hidden layer diantara layer input dan layer output. Meskipun penggunaan lebih dari satu layer tersembunyi mempunyai manfaat untuk beberapa kasus namun tetapi pelatihannya memerlukan waktu yang lebih lama.
Maka umumnya orang mulai mencoba dengan sebuah layer tersembunyi dahulu. Pada dasarnya metode back-propagation melatih jaringan untuk mendapatkan keseimbangan antara kemampuan jaringan untuk mengenali pola yang digunakan
selama pelatihan serta kemampuan jaringan untuk memberikan respons yang benar terhadap pola masukan yang serupa dengan pola yang dipakai selama pelatihan. Fungsi aktifasi yang dipakai adalah
sigmoid biner yang memiliki nilai antara 0 dan 1.
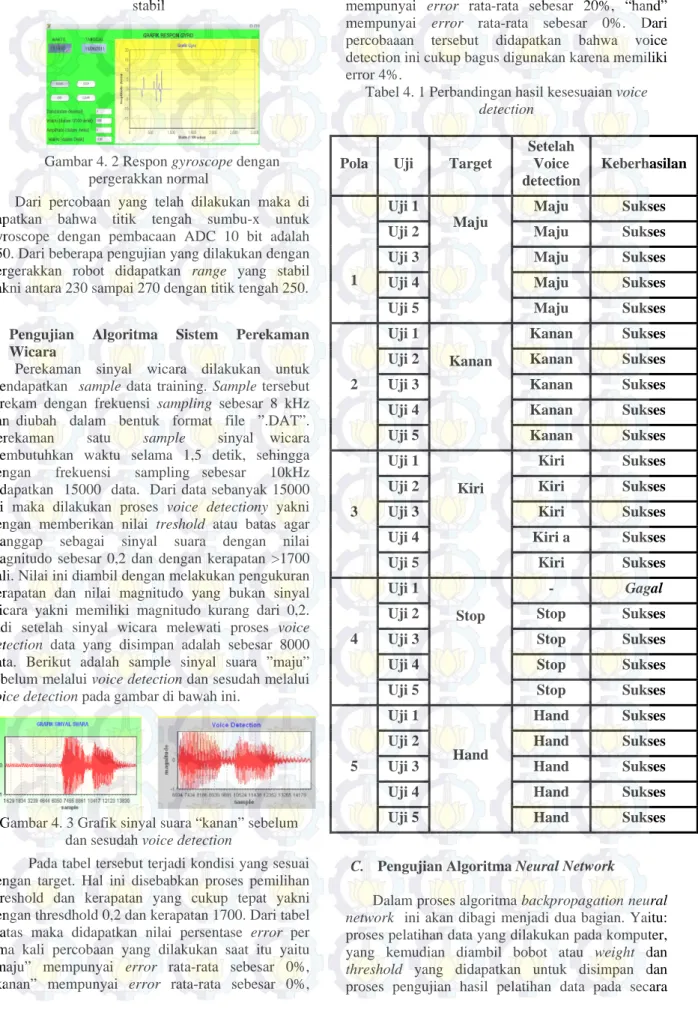
Prinsip dari metode backpropagation ini adalah meliputi 3 fase yaitu fase maju, fase mundur dan modifikasi bobot. Kondisi batas perhentian yang biasa dipakai adalah jumlah iterasi atau jumlah kesalahan. Untuk perhitungan pelatihan algoritma backpropagation dan pengujian menggunakan pemrograman Delphi. Alur dari progam jaringan saraf tiruan ini adalah sebagai berikut:
Gambar 3. 6 Flow chart program.
IV. PENGUJIAN ALAT DAN PENGAMBILAN DATA
Setelah tahap perancangan alat selesai tahap berikutnya yaitu pengujian alat. Pada tahap ini semua bagian robot dan software akan diuji.
A. Pengujian Sensor Gyroscope
Pengujian yang dilakuan yaitu untuk output
gyroscope dengan tanpa input gerakkan terhadap
sumbu axis-x (stabil) akan ditampilkan pada gambar berikut.
Gambar 4. 1 Respon gyroscope dalam keadaan stabil
Gambar 4. 2 Respon gyroscope dengan pergerakkan normal
Dari percobaan yang telah dilakukan maka di dapatkan bahwa titik tengah sumbu-x untuk gyroscope dengan pembacaan ADC 10 bit adalah 250. Dari beberapa pengujian yang dilakukan dengan pergerakkan robot didapatkan range yang stabil yakni antara 230 sampai 270 dengan titik tengah 250.
B. Pengujian Algoritma Sistem Perekaman Wicara
Perekaman sinyal wicara dilakukan untuk mendapatkan sample data training. Sample tersebut direkam dengan frekuensi sampling sebesar 8 kHz dan diubah dalam bentuk format file ”.DAT”. Perekaman satu sample sinyal wicara membutuhkan waktu selama 1,5 detik, sehingga dengan frekuensi sampling sebesar 10kHz didapatkan 15000 data. Dari data sebanyak 15000 ini maka dilakukan proses voice detectiony yakni dengan memberikan nilai treshold atau batas agar dianggap sebagai sinyal suara dengan nilai magnitudo sebesar 0,2 dan dengan kerapatan >1700 kali. Nilai ini diambil dengan melakukan pengukuran kerapatan dan nilai magnitudo yang bukan sinyal wicara yakni memiliki magnitudo kurang dari 0,2. Jadi setelah sinyal wicara melewati proses voice
detection data yang disimpan adalah sebesar 8000
data. Berikut adalah sample sinyal suara ”maju” sebelum melalui voice detection dan sesudah melalui
voice detection pada gambar di bawah ini.
Gambar 4. 3 Grafik sinyal suara “kanan” sebelum dan sesudah voice detection
Pada tabel tersebut terjadi kondisi yang sesuai dengan target. Hal ini disebabkan proses pemilihan threshold dan kerapatan yang cukup tepat yakni dengan thresdhold 0,2 dan kerapatan 1700. Dari tabel diatas maka didapatkan nilai persentase error per lima kali percobaan yang dilakukan saat itu yaitu “maju” mempunyai error rata-rata sebesar 0%, “kanan” mempunyai error rata-rata sebesar 0%,
“kiri” mempunyai error rata-rata sebesar 0%, “stop” mempunyai error rata-rata sebesar 20%, “hand” mempunyai error rata-rata sebesar 0%. Dari percobaaan tersebut didapatkan bahwa voice detection ini cukup bagus digunakan karena memiliki error 4%.
Tabel 4. 1 Perbandingan hasil kesesuaian voice
detection
C. Pengujian Algoritma Neural Network
Dalam proses algoritma backpropagation neural
network ini akan dibagi menjadi dua bagian. Yaitu:
proses pelatihan data yang dilakukan pada komputer, yang kemudian diambil bobot atau weight dan
threshold yang didapatkan untuk disimpan dan
proses pengujian hasil pelatihan data pada secara
Pola Uji Target
Setelah Voice detection Keberhasilan 1 Uji 1 Maju Maju Sukses
Uji 2 Maju Sukses
Uji 3 Maju Sukses
Uji 4 Maju Sukses
Uji 5 Maju Sukses
2
Uji 1
Kanan
Kanan Sukses
Uji 2 Kanan Sukses
Uji 3 Kanan Sukses
Uji 4 Kanan Sukses
Uji 5 Kanan Sukses
3
Uji 1
Kiri
Kiri Sukses
Uji 2 Kiri Sukses
Uji 3 Kiri Sukses
Uji 4 Kiri a Sukses
Uji 5 Kiri Sukses
4
Uji 1
Stop
- Gagal
Uji 2 Stop Sukses
Uji 3 Stop Sukses
Uji 4 Stop Sukses
Uji 5 Stop Sukses
5
Uji 1
Hand
Hand Sukses
Uji 2 Hand Sukses
Uji 3 Hand Sukses
Uji 4 Hand Sukses
feedforward menggunakan weight atau bobot dan
threshold yang telah disimpan tadi.
Tabel 4. 2 Tabel target data yang akan dilatihkan
No pola Jenis Kata Target
1 Maju 100000 2 Kanan 010000 3 Kiri 001000 4 Stop 000100 5 Hand 000010 6 Kosong 000001
Pada proses palatihan ini, didomain frekuensi dan domain waktu menggunakan sebuah hidden layer 1 yang terdiri dari 50 neuron dan 30 buah neuron hidden layer 2, serta output 6 neuron. Untuk layer input memiliki 8000 data input. Neuron pada layer output merupakan target yang diinginkan yaitu maju (100000), kanan (010000), kiri (001000), stop (000100), hand (000010) dan kosong (000001). Pada proses pelatihan data, didapatkan nilai MSE
(mean square error) seperti grafik pada gambar 4.6
Dari grafik nilai pada iterasi ke 16775 adalah 0,00252772540426484.
Gambar 4. 4 Tampilan proses learning pada iterasi ke 16775
D. Pengujian Hasil Pelatihan Data
Bobot yang telah didapatkan dari proses pelatihan data akan digunakan pada proses pengujian. Pengujian ini akan dilakukan dengan menggunakan metode feedforward.
Dari hasil pengujian dengan 5 sample untuk tiap pola data maka didapatkan nilai neuron tiap output dan hasil kesesuain pada target..
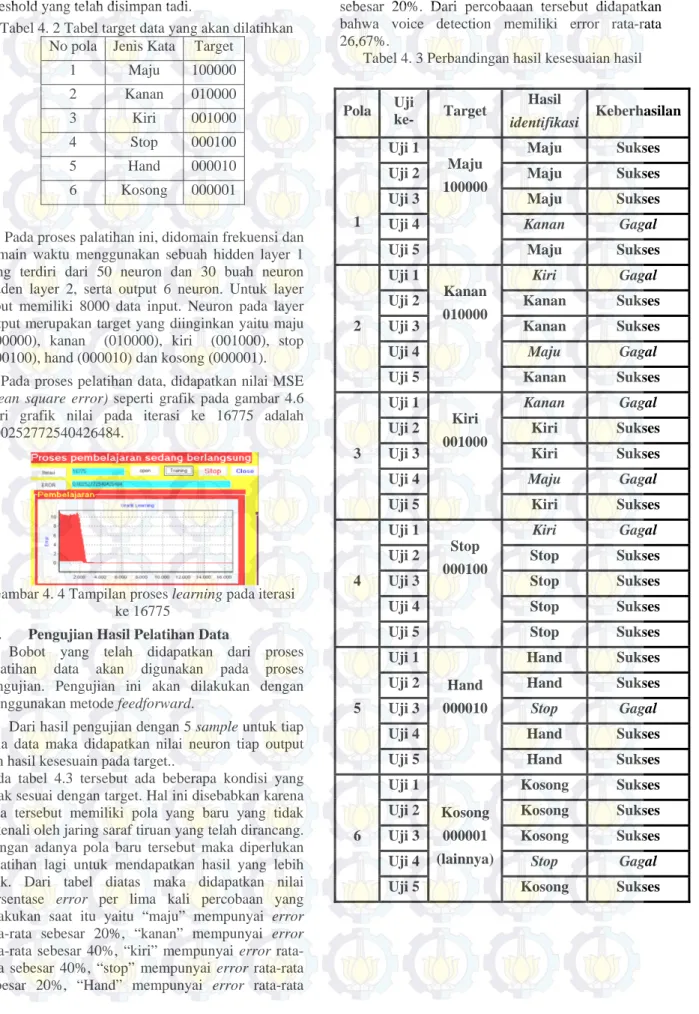
Pada tabel 4.3 tersebut ada beberapa kondisi yang tidak sesuai dengan target. Hal ini disebabkan karena data tersebut memiliki pola yang baru yang tidak dikenali oleh jaring saraf tiruan yang telah dirancang. Dengan adanya pola baru tersebut maka diperlukan pelatihan lagi untuk mendapatkan hasil yang lebih baik. Dari tabel diatas maka didapatkan nilai persentase error per lima kali percobaan yang dilakukan saat itu yaitu “maju” mempunyai error rata-rata sebesar 20%, “kanan” mempunyai error rata sebesar 40%, “kiri” mempunyai error rata-rata sebesar 40%, “stop” mempunyai error rata-rata-rata-rata sebesar 20%, “Hand” mempunyai error rata-rata
sebesar 20%, “Kosong” mempunyai error rata-rata sebesar 20%. Dari percobaaan tersebut didapatkan bahwa voice detection memiliki error rata-rata 26,67%.
Tabel 4. 3 Perbandingan hasil kesesuaian hasil
Pola Uji ke- Target Hasil identifikasi Keberhasilan 1 Uji 1 Maju 100000 Maju Sukses
Uji 2 Maju Sukses
Uji 3 Maju Sukses
Uji 4 Kanan Gagal
Uji 5 Maju Sukses
2
Uji 1
Kanan 010000
Kiri Gagal
Uji 2 Kanan Sukses
Uji 3 Kanan Sukses
Uji 4 Maju Gagal
Uji 5 Kanan Sukses
3
Uji 1
Kiri 001000
Kanan Gagal
Uji 2 Kiri Sukses
Uji 3 Kiri Sukses
Uji 4 Maju Gagal
Uji 5 Kiri Sukses
4
Uji 1
Stop 000100
Kiri Gagal
Uji 2 Stop Sukses
Uji 3 Stop Sukses
Uji 4 Stop Sukses
Uji 5 Stop Sukses
5
Uji 1
Hand 000010
Hand Sukses
Uji 2 Hand Sukses
Uji 3 Stop Gagal
Uji 4 Hand Sukses
Uji 5 Hand Sukses
6 Uji 1 Kosong 000001 (lainnya) Kosong Sukses
Uji 2 Kosong Sukses
Uji 3 Kosong Sukses
Uji 4 Stop Gagal
V. PENUTUP A. Kesimpulan
Setelah melakukan pengujian dari keseluruhan sistem pada tugas akhir ini, dan berdasarkan data yang telah didapat dapat diambil beberapa kesimpulan sebagai berikut :
1 Didapatkan range kestabilan gyroscope dengan
pembacaan ADC 10 bit pada 230 sampai 270 dengan titik tengah 250.
2 Didapatkan nilai persentase error per lima kali
percobaan yang dilakukan untuk algoritma
voice detection saat itu yaitu “maju”
mempunyai error rata-rata sebesar 0%, “kanan” mempunyai error rata-rata sebesar 0%, “kiri” mempunyai error rata-rata sebesar 0%, “stop” mempunyai error rata-rata sebesar 20%, “hand” mempunyai error rata-rata sebesar 0%. Dari percobaaan tersebut didapatkan bahwa voice detection ini cukup bagus digunakan karena memiliki error 4% dan keberhasilan 96%.
3 Didapatkan nilai persentase error per lima kali
percobaan yang dilakukan untuk algoritma pengenalan wicara saat itu yaitu “maju” mempunyai error rata-rata sebesar 20%, “kanan” mempunyai error rata-rata sebesar 40%, “kiri” mempunyai error rata-rata sebesar 40%, “stop” mempunyai error rata-rata sebesar 20%, “Hand” mempunyai error rata-rata sebesar 20%, “Kosong” mempunyai error rata-rata sebesar 20%. Dari percobaaan tersebut didapatkan bahwa voice detection ini memiliki error rata-rata 26,67% dan keberhasilan 73,33%.
B. Saran
Saran penulis untuk meningkatkan ketepatan proses voice detection, penulis juga di harapkan untuk menambah proses sample suara yang akan dibelajarkan sehingga pada waktu melakukan proses testing error yang didapat berkurang.
REVERENSI
[1].…, 2010, speech recognition, <URL: http://en.wikipedia.org/wiki/Speech_recognition > [2]…, 2010, Introduction of Electret Condenser Microphone,
<URL:http://www.buzzerspeaker.com/manufacturer/ introduction of microphone>
[3]…, 2009, Condenser Mirophone Signal, <URL: http://electronics.wups.lviv.ua/KREM_literatura/hyp erphysics/hbase/audio/ecm>.
[4] Robby C, 2006, Gyro Sensor <URL:
http://support.robotis.com/en/techsupport_eng.htm>. [5] Yogo Takada, Tomoki Tajiri, Kiyoshi Ogawa and Tomoyuki Wakisaka, 2011, Walking Pattern Generation and Stabilization of Walking for Small Humanoid Robots, Osaka City University, Japan.
[6]Yunus Wicaksono Sugiarso, 2010, Pengembangan Sistem Komunikasi Antar Pemakai Helm, Institut Teknologi Sepuluh Nopember, Surabaya.
[7]…, 2010, Feedforward neural network, <URL: http://en.wikipedia.org/wiki/Feedforward_neural_net work>
[8]…, 2010, Backpropagation, <URL: http://en.wikipedia.org/wiki/Backpropagation>
RIWAYAT HIDUP PENULIS
Penulis dilahirkan di Mojokerto pada tanggal 31 Januari 1989 bernama Lukman Arif Kurniawan. Putra kedua dari dua bersaudara. Selama menjadi mahasiswa penulis aktif sebagai anggota kegiatan komunitas robot di Jurusan Teknik Elektro dan ITS dari tahun 2007 sampai sekarang.
Riwayat Pendidikan :
o Teknik Elektro ITS Surabaya Jawa Timur, angkatan 2009,
o SMAN 1 Sooko, Mojokerto, Jawa Timur, lulus tahun 2006,
o SMPN 1 Mojosari, Mojokerto, Jawa Timur, lulus tahun 2003,
o SDN Kutorejo, Mojokerto, Jawa Timur, lulus tahun 2000.
![Gambar 2.1 Bagian Utuh ECM [2]](https://thumb-ap.123doks.com/thumbv2/123dok/2455908.3597813/1.892.123.780.123.1136/gambar-bagian-utuh-ecm.webp)
![Gambar 2.5 Organ Wicara Manusia[6]](https://thumb-ap.123doks.com/thumbv2/123dok/2455908.3597813/3.892.124.778.129.1144/gambar-organ-wicara-manusia.webp)